MAX7219及其与AT89C2051的串行应用

●新特器件应用
MA X7219及其与A T89C2051的串行应用
湖北省环保所
姜永年
摘要:MA X7219是一种高性能八位串行接口L ED 驱动芯片。本文主要介绍其内部
结构、应用要点及与A T89C2051串行接口的编程方法。
关键词:MA X7219L ED 显示器串行驱动A T89C2051节电运行亮度控制
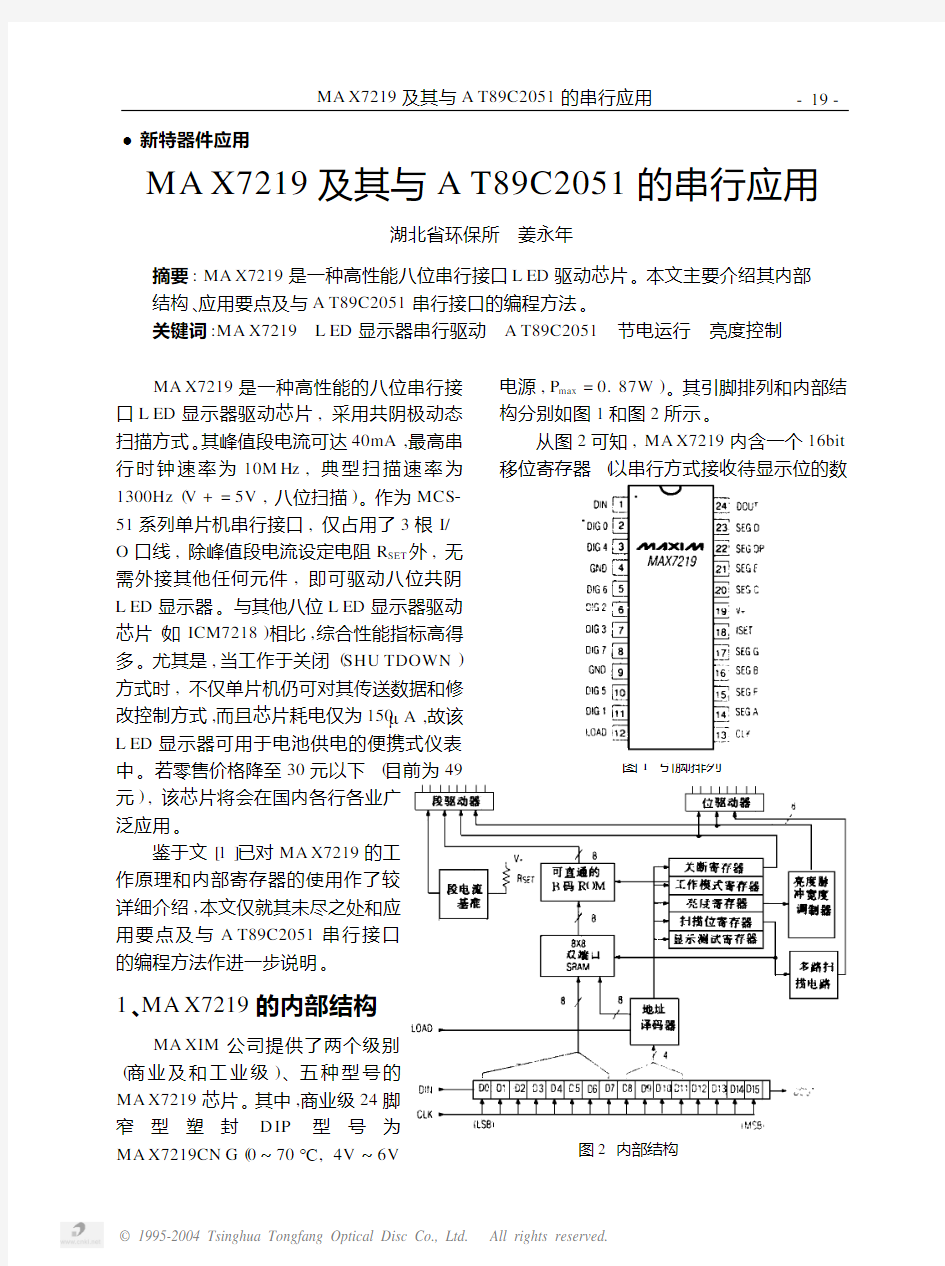
图1引脚排列
图2内部结构
MA X7219是一种高性能的八位串行接
口L ED 显示器驱动芯片,采用共阴极动态扫描方式。其峰值段电流可达40mA ,最高串行时钟速率为10M Hz ,典型扫描速率为1300Hz (V +=5V ,八位扫描)。作为MCS 251系列单片机串行接口,仅占用了3根I/
O 口线,除峰值段电流设定电阻R SET 外,无
需外接其他任何元件,即可驱动八位共阴L ED 显示器。与其他八位L ED 显示器驱动芯片(如ICM7218)相比,综合性能指标高得多。尤其是,当工作于关闭(SHU TDOWN )方式时,不仅单片机仍可对其传送数据和修改控制方式,而且芯片耗电仅为150μA ,故该L ED 显示器可用于电池供电的便携式仪表中。若零售价格降至30元以下(目前为49元),该芯片将会在国内各行各业广泛应用。
鉴于文[1]已对MA X7219的工作原理和内部寄存器的使用作了较详细介绍,本文仅就其未尽之处和应用要点及与A T89C2051串行接口的编程方法作进一步说明。
1、MA X7219的内部结构
MA XIM 公司提供了两个级别(商业及和工业级)、五种型号的MA X7219芯片。其中,商业级24脚
窄型塑封
D IP
型号为MA X7219CN G (0~70℃,4V ~6V
电源,P max =0.87W )。其引脚排列和内部结构分别如图1和图2所示。
从图2可知,MA X7219内含一个16bit 移位寄存器(
以串行方式接收待显示位的数
表1 M A X 7219管脚说明
引 脚
符 号
功能说明
19V +
电源端(4~6V ,典型值5V ±10%)4,9GND 地
18I SET 经电阻R SET 与V +相连,以设定段电流峰值。1
D I N 串行数据输入端(在CL K 上升沿,数据装入内部16bit 移位寄存器)13CL K 串行时钟输入端。在CL K 上升沿,数据移入内部移位寄存器;在CL K 下降沿,数据移出DOU T 端。
24
DOU T
串行数据输出端。移入D I N 端的串行数据在16.5个时钟周期后,在DOU T 端有效。
2,3,5~8,10,11
D IG 0
~7八位位驱动线,从显示器吸收电流。
14~17,20~23SEG A 2G ,D P 七段和小数点驱动线,为显示器提供段电流。
据或控制寄存器的控制字及相应寄存器的地
址码)、地址译码寄存和与显示数据、控制方式有关的13个寄存器,它们是:8个带旁路通道的B 码译码编程器ROM (与8×8双端口SRA M 相连)、译码方式控制寄存器(决定显示数据是采用8个ROM 中已编程的BCD 码译码还是采用非编码方式—SRA M 中数据经旁路通道直接送相应位的各段)、亮度控制寄存器、扫描位数寄存器、关闭控制寄存器和显示器测试寄存器。片内实际并无
NO 2OP 寄存器,当移入16bit ,移位寄存器中
的D8~D11位为0000时,本级芯片只作一次空操作,相当于MCS 251中的NOP 指令。片内段电流基准源根据R SET 的值,提供大约100倍于I SET 端电流的段电流。扫描位数寄存器的编程设定值控制多路扫描开关对相应各位进行动态扫描。片内还提供了完整的段、位驱动器,只要段电流不超过40mA ,一个芯片可直接驱动八位L ED 显示器,无需外接其他元件或芯片。从而,大大简化了电路设计和元件数目,缩小了印制板空间,提高了系统可靠性,也降低了系统功耗。
2、引脚说明
MA X7219的引脚可分为电源、串行输
入/输出和段/位驱动三类,具体说明见表1。
3、片内寄存器的数据格式
MA X7219片内寄存器的数据格式及编
码内容如表2所列。
4、应用
4.1应用要点
MA X7219是作为68HC16系列16位单
片的串行接口器件的。当与MCS 251系列单片机的串行接口相连时,应该注意以下问题:
(1)由D IN 端输入的串行数据必须以16bit 为一组,其中高八位D15~D8为寄存
器的地址,低八位D7~D0为相应寄存器的数据或控制字节。
(2)按MA X7219的时序要求,最先接
收到的应是一组数据中的D15(MSB )位,最后接收到的是D0(L SB )。若采用MCS 251系列单片机的全双工异步串行口RXD 和TXD 向MA X7219传送数据,执行MOV SBU F ,A 指令后,最先发送的是D0位,最后发送的是D7位。因此一组16bit 待传送数据,按两字节分别作逆序排列(即D7与D0、D6与D1、D5与D2、D4与D3进行交换)后,暂存于dir1和dir2二单元中,再执行:
CL R P1.5;假定P1.5与L OAD 相连
MOV A ,dir1;dir1中内容为寄存器地址MOV SBU F ,A ;向7219传送高八位内容
表2 M A X 7219片内寄存器格式与内容说明
寄存器名数
据格式
NO 2OP D IG 0D IG 1D IG 2D IG 3D IG 4D IG 5D IG 6D IG 7译码方式寄存器亮度控制寄存器扫描位数寄存器显示器关闭控制寄存器显示器测试寄存器
地 址
HEX D 15212D 11D 10D 9D 8X 0X 0000X 1X 0001X 2X 0010X 3X 0011X 4X 0100X 5X 0101X 6X 0110X 7X 0111X 8X 1000X 9X 1001XA X 1010XB X 1011XC X 1100XF
X
1
1
1
1
← 数 据 →
M SB L SB
D 7D 6D 5D 4D 3D 2D 1D 0X
X
D P 0101010…
1010
1
0101X
010…10101X
1
0…101X 01X 01说 明
“X ”
表示任意值空操作代码为X 0XXH
(1)在D IG 0~7各位中,D 7对应DP 。DP =
1,小数点亮;DP =0,小数点灭。(2)在B 码译码方式中,D 6~D 4位不用,可为任意值。D 3~D 0=0000~1001,对应位显示“0~9”;D 3~D 0=1010~1110时,分别显示字符“-、E 、H 、L 、P ”
;D 3~D 0=1111,显示“空白”
(即不显示)。(3)在非编码方式中,D 6~D 0分别对应A ~G 七段,D 仍对应DP 。
D 7~D 0分别代表D IG 7~0各位的译码方
式。D i =0,D IGi 位采用非编码方式;D i =0,D IGi 采用B 码。D 3~D 0=0000~1111,对应的亮度占空比
分别为1 32,3 32,…31 32。31 32对应亮度最大,1 32对应亮度最小。
D 2~D 0=000~111,分别对应扫描第0位,第0位和第1位,…第0位至第7位全亮。
关闭L ED 显示器(片内数据有效)
开启L ED 显示器按设定方式正常显示八位各段全亮
MOV A ,dir2;dir2中为寄存的数据MOV SBU F ,A ;向7219传送低八位内容SETB P1.5;加载数据
就可将数据加入并锁存到7219内部寄存器中。
(3)由D IN 端输入的串行数据,在每个CL K 的上升沿移入MA X7219内部的16bit 移位寄存器。连续16次移位后,在L OAD 的上升沿,数据锁存到地址码所规定的寄存器中。应特别注意的是,L OAD 信号应在传送一组数据的第16个CL K 上升的同时或稍后,而在下一个CL K 上升沿到来之前由低变高,否则该组数据将丢失。
(4)片内8个数据寄存器和5个控制寄
存器均可单独寻址,单独(而不是依次)进行
数据或控制字的装入或修改,而不象某些控制芯片(如MC14499)那样,修改一个寄存器
内容,需对所有寄存器顺序刷新一次。
(5)对D IG027中某位或某几位或全部,既可采用B 码译码方式,也可采用非编码方式,这取决于译码方式寄存器对应位(Di )是
0还是1。若Di =0,则D IG i 采用B 码译码方
式。这时,在数据字节中,D7控制DP (小数点)的亮灭,D6~D4为任意值,只有D3~D0参与编码。若Pi =1,则D IG i 采用非编码方式,且D7~D0分别与DP 及A 2G 各段相对应,编程时应注意这种对应关系。这时,可显示的字符数将大大增加。当然,用户应事先将编码表存于用户ROM 的数据区内。若用户按正常的逆序编码,而D7~D0分别对应于DP 和GNA 七段,则执行RL A 和MOV
SBU F ,A 指令(假定寄存器的数据字节正在
累加器A 中),便正好是MA X7219对一组数据中低八位的时序要求,而不必再行逆序
排列。
(6)MA X7219和M IA XIM公司大多数CMOS芯片一样,具有节电运行方式。在该方式下,显示器不显示(关闭),芯片电源电流降为150μA。不仅片内各寄存器数据保持有效,还可对其更新数据或改变控制方式。利用这一功能,采用软件编程控制(定时或数据
采集完成之后)或由按键控制,只在需要时,短时间开放显示器,显示测量结果。平时显示器一直处于关闭状态,这样可大大降低系统功耗,使L ED显示器可用于电池供电的便携式仪表中。
(7)本级芯片的DOU T端与下级芯片的
D IN端相连,可实现多个芯片的级联,从而可驱动n×8位L ED显示器(n为级联芯片数)。例如,4个芯片级联。为将一组数据传送至最后一级芯片的某寄存器,则先发送该组数据,随后发送三组NO2OP(空操作)指令。在第64个CL K上升沿或稍后,而在第65个CL K上升沿出现之前,使L OAD由低变高。这样,最后一级芯片收到有效数据,而前三级芯片则工作了一次空操作。这是厂家提供的操作方式。然而,笔者认为,若级联芯片较多,空操作占用大量机时,效率低。其实,将L OAD当作片选端CS,与单片机I/O线相连。在发送一级数据的第16个CL K上升沿,仅使需接收数据的芯片的L OAD由低变高,而其余芯片的L OAD仍维持低电平。这样,用不着传送任何空操作指令,可大大提高多个芯片级联时的数传效率。当然,这样做将多占用I/O口线。
(8)L ED显示器的实际亮度由以下四个因素决定:L ED的正向压降、段电流峰值设定电阻R SET、扫描位数和亮度控制寄存器的设定值。当段电流峰值超过40mA时,需外接驱动器,这时,MA X7219仅作为驱动器的控制器。厂家给出了段电流与R SET、L ED正向压降的关系见表3。还规定,当实际扫描显示位数为1位/2位/3位时,其段电流峰值不得超过10/20/30mA。对于给定的L ED 显示器(V L ED一定),当待显示的扫描位数和R SET确定后,显示器的亮度便由亮度控制寄存器的可编程设定值确定。有意义的是,可用光敏元件检测环境照度的变化,经A/D转换后,自动改变亮度控制寄存器的值,使L ED的亮度随环境照度变化自动调节。这样,不仅便于观察,还可省电。
(9)在需频繁修改显示内容或改变控制方式的场合,在单片机内部RA M中开辟一地址与MA X7219寄存器地址相吻合的显示缓冲区,对软件编程会带来很大方便。
4.2应用实例
用A T89C2051和MA X7219构成的最小应用系统,如图3所示。与用L M8361之类专用芯片相比,电路简单,编程容易,而功能却强得多。该系统也可用作机关、学校作息时间
表3 段电流设定表
)3%4(
mA)
23%4(kΩ)
6,%?(V)
1.52
2.53
3.5
4011.310.49.88.97.8
3016.3151412.911.4
2026.324.622.820.918.6
1060.15651.74741.9
图3最小应用系统
控制器,实际使用效果良好,受到用户好评。
4.3编程举例
基于以上考虑,将A T89C2051内部RA M的30H~3F H单元作为存放MA X7219内部14个寄存器数据的缓冲区,其对应关系见表4。主程序或其他子程序调用以下M7219子程序,便可将显示数据或控制方式字节内容传送给MA X7219。
MA IN:…
MOV R0,#ADDR;ADDR为发送单元首地址
MOV R7,#data;data;data为连续发送单元单元数目
L ALL M7219;调用发送子程序
…
M7219:A NL P1,#1F H;使P1.5-P1.7清“0”
MOV A,R0;
L CALL M0;发送寄存器地址
MOV A,@R0;
L CALL M0;发送寄存器数据
SETB P1.5;加载数据
INC R0;
DJ N Z R7,M7219;
R ET
M0:MOV R1,#08H;一个字节分8次串行发送
M1:RL C A
MOV P1.7,C
SETB P1.6
A NL P1,#3F H;使P1.5,P1.6同时置“0”
DJ N Z R1,M1
R ET
在程序的适当地方执行以下子程序,即可实现对L ED显示器的开、关控制,达到省电之目的。
D IS KG:MOV A,3CH
RRC A
CPL C
RL C A
MOV3CH,A
MOV R0,#3CH
MOV R7,#1
L CALL M7219
参考文献:
1.王建萍,MA X7219串行L ED显示驱动器及其应用。电子技术应用.1996(5)
2.Individual Data Sheet:Seriall y Inter2 faced,82Di g it L ED Dis2p la y Driver,MA X2 IM Cor p.
咨询编号:961206
表4 14个寄存器在RAM中的映射
89C2051内部RAM地址7219内部寄存器名
30H NO2O P
31H D IG0
32H D IG1
33H D IG2
34H D IG3
35H D IG4
36H D IG5
37H D IG6
38H D IG7
39H D ECOD E M OD E
3A H I N T EN S IT Y
3BH SCAU L I M IT
3CH SHU TDOW N
3DH-
3EH-
3FH D ISPLA Y T EST
启示
我社另售《国外电子元器件》增
刊———中外电子元器件采购指南,
每本20元。欲购者通过邮局汇款到
我社即可。
MAX7219中文资料
_______________General Description The MAX7219/MAX7221 are compact, serial input/out-put common-cathode display drivers that interface microprocessors (μPs) to 7-segment numeric LED dis-plays of up to 8 digits, bar-graph displays, or 64 indi-vidual LEDs. Included on-chip are a BCD code-B decoder, multiplex scan circuitry, segment and digit drivers, and an 8x8 static RAM that stores each digit.Only one external resistor is required to set the seg-ment current for all LEDs. The MAX7221 is compatible with SPI?, QSPI?, and Microwire?, and has slew-rate-limited segment drivers to reduce EMI. A convenient 3-wire serial interface connects to all common μPs. Individual digits may be addressed and updated without rewriting the entire display. The MAX7219/MAX7221 also allow the user to select code- B decoding or no-decode for each digit. The devices include a 150μA low-power shutdown mode, analog and digital brightness control, a scan-limit register that allows the user to display from 1 to 8digits, and a test mode that forces all LEDs on. ________________________Applications Bar-Graph Displays 7-Segment Displays Industrial Controllers Panel Meters LED Matrix Displays ____________________________Features o 10MHz Serial Interface o Individual LED Segment Control o Decode/No-Decode Digit Selection o 150μA Low-Power Shutdown (Data Retained)o Digital and Analog Brightness Control o Display Blanked on Power-Up o Drive Common-Cathode LED Display o Slew-Rate Limited Segment Drivers for Lower EMI (MAX7221) o SPI, QSPI, Microwire Serial Interface (MAX7221)o 24-Pin DIP and SO Packages MAX7219/MAX7221 Serially Interfaced, 8-Digit LED Display Drivers ________________________________________________________________Maxim Integrated Products 1 ________Typical Application Circuit __________________Pin Configuration 19-4452; Rev 3; 7/97 SPI and QSPI are trademarks of Motorola Inc. Microwire is a trademark of National Semiconductor Corp. For free samples & the latest literature: https://www.360docs.net/doc/5114070786.html,, or phone 1-800-998-8800.For small orders, phone 408-737-7600 ext. 3468.
中文资料TL494CN
TL494常应用于电源电路当中,在本站的文章中,除了本文TL494中文资料及应用电路,还有一个电路是应用了TL494资料的,具体的电路图,请参考本站文 章:200W的ATX电源线路图,本文已经提供了比较丰富的TL494中文资料了 TL494是一种固定频率脉宽调制电路,它包含了开关电源控制所需的全部功能,广泛应用于单端正激双管式、半桥式、全桥式开关电源。TL494有SO-16和PDIP-16两种封装形式,以适应不同场合的要求。其主要特性如下: TL494主要特征 集成了全部的脉宽调制电路。 片内置线性锯齿波振荡器,外置振荡元件仅两个(一个电阻和一个电容)。 内置误差放大器。 内止5V参考基准电压源。 可调整死区时间。 内置功率晶体管可提供500mA的驱动能力。 推或拉两种输出方式。 TL494外形图 TL494引脚图
TL494工作原理简述 TL494是一个固定频率的脉冲宽度调制电路,内置了线性锯齿波振荡器,振荡频率可通过外部的一个电阻和一个电容进行调节,其振荡频率如下: 输出脉冲的宽度是通过电容CT上的正极性锯齿波电压与另外两个控制信号进行比较来实现。功率输出管Q1和Q2受控于或非门。当双稳触发器的时钟信号为低电平时才会被选通,即只有在锯齿波电压大于控制信号期间才会被选通。当控制信号增大,输出脉冲的宽度将减小。参见图2。
TL494脉冲控制波形图 控制信号由集成电路外部输入,一路送至死区时间比较器,一路送往误差放大器的输入端。死区时间比较器具有120mV的输入补偿电压,它限制了最小输出死区时间约等于锯齿波周期的4%,当输出端接地,最大输出占空比为96%,而输出端接参考电平时,占空比为48%。当把死区时间控制输入端接上固定的电压(范围在0—3.3V之间)即能在输出脉冲上产生附加的死区时间。 脉冲宽度调制比较器为误差放大器调节输出脉宽提供了一个手段:当反馈电压从0.5V变化到3.5时,输出的脉冲宽度从被死区确定的最大导通百分比时间中下降到零。两个误差放大器具有从-0.3V到(Vcc-2.0)的共模输入范围,这可能从电源的输出电压和电流察觉得到。误差放大器的输出端常处于高电平,它与脉冲宽度调制器的反相输入端进行“或”运算,正是这种电路结构,放大器只需最小的输出即可支配控制回路。 当比较器CT放电,一个正脉冲出现在死区比较器的输出端,受脉冲约束的双稳触发器进行计时,同时停止输出管Q1和Q2的工作。若输出控制端连接到参考电压源,那么调制脉冲交替输出至两个输出晶体管,输出频率等于脉冲振荡器的一半。如果工作于单端状态,且最大占空比小于50%时,输出驱动信号分别从晶体管Q1或Q2取得。输出变压器一个反馈绕组及二极管提供反馈电压。在单端工作模式下,当需要更高的驱动电流输出,亦可将Q1和Q2并联使用,这时,需将输出模式控制脚接地以关闭双稳触发器。这种状态下,输出的脉冲频率将等于振荡器的频率。 TL494内置一个5.0V的基准电压源,使用外置偏置电路时,可提供高达10mA的负载电流,在典型的0—70℃温度范围50mV温漂条件下,该基准电压源能提供±5%的精确度。 TL494内部电路方框图
max7219资料及电路图
MAX7219是MAXIM公司生产的串行输入/输出共阴极数码管显示驱动芯片,一片MAX7219可驱动8个7段(包括小数点共8段)数字LED、LED条线图形显示器、或64个分立的LED发光二级管。该芯片具有10MHz传输率的三线串行接口可与任何微处理器相连,只需一个外接电阻即可设置所有LED的段电流。。它的操作很简单,MCU只需通过模拟SPI三线接口就可以将相关的指令写入MAX7219的内部指令和数据寄存器,同时它还允许用户选择多种译码方式和译码位。此外它还支持多片7219串联方式,这样MCU就可以通过3根线(即串行数据线、串行时钟线和芯片选通线)控制更多的数码管显示。MAX7219的外部引脚分配如图1所示及内部结构如图2所示。 图1 MAX7219的外部引脚分配
图2 MAX7219的内部引脚分配 各引脚的功能为: DIN:串行数据输入端 DOUT:串行数据输出端,用于级连扩展 LOAD:装载数据输入 CLK:串行时钟输入 DIG0~DIG7:8位LED位选线,从共阴极LED中吸入电流 SEG A~SEG G DP 7段驱动和小数点驱动 ISET:通过一个10k电阻和Vcc相连,设置段电流 MAX7219有下列几组寄存器:(如图3) MAX7219内部的寄存器如图3,主要有:译码控制寄存器、亮度控制寄存器、扫描界限寄存器、关断模式寄存器、测试控制寄存器。编程时只有正确操作这些寄存器,MAX7219才可工作。
图 3 MAX7219内部的相关寄存器 分别介绍如下: (1)译码控制寄存器(X9H) 如图4所示,MAX7219有两种译码方式:B译码方式和不译码方式。当选择不译码时,8个数据为分别一一对应7个段和小数点位;B译码方式是BCD译码,直接送数据就可以显示。实际应用中可以按位设置选择B译码或是不译码方式。 图4 MAX7219的译码控制寄存器 (2)扫描界限寄存器(XBH)
MAX7219
多功能LED译码显示驱动IC PS7219 1 引言 PS7219是由力源公司自行研制、开发的一款新型多功能8位LED显示驱动IC。接口采用三线SPI方式,用户只需简单修改内部相关的控制或数字RAM,便可很容易地实现多位LED显示。在性能上PS7219与MAXIM 公司的MAX7219完全兼容,并增加了位闪等功能。 PS7219具有多个级联特性,为大屏幕LED显示提供了方便。在理论上,只需三根用户I/O口控制线,便可以实现无穷多的LED级联显示。在实际应用中,已实现了149片PS7219级联,可以控制1192位LED 显示。 2 PS7219特点与引脚说明 PS7219的特点: ★ 串行接口(16位控制字); ★ 8位共阴级LED显示驱动; ★ 显示位数1~8,可数字调节; ★ 按位进行BCD译码/不译码数字制; ★ 16级亮度数字控制; ★ 上电LED全熄; ★ 提供位闪功能; ★ 多个PS7219级联可实现任意多的LED显示;★ 宽24脚双列直插模块封装。 PS7219引脚图如图1所示。 引脚功能说明见表1。 3 PS7219内部结构 如图2 所示,PS7219由六部分组成。 图2 PS7219内部组成框图 图1 PS7219引脚排列
3.1 串行输入缓冲部分 主要功能是与外部控制信号接口,将控制命令串 行读入,并进行串并转换,供控制器读取。 3.2 控制器 是整个IC的核心部分。它先将输入缓冲部分的控制字读入处理,根据其地址值送到相应的控制RAM或数字RAM,同时将数据送入串行同步输出部分,以便在下一个控制字输入周期,将其串行输出。 3.3 控制RAM数据RAM 这两部分一起控制LED译码显示部分,实现不同功能及字符的显示。 控制RAM包括:空操作寄存器,译码模式控制寄存器,亮度控制寄存器,掉电控制寄存器,闪烁控制寄存器,测试控制寄存器和扫描界线寄存器。 数据RAM包括:数据1—8寄存器。 3.4 LED译码显示 根据控制RAM和数据RAM的不同值,来实现相应的显示功能。 3.5 内部时钟电路 为控制器提供频率为24MHz的基准时钟,为LED译码显示电路提供频率为1.5kHz的扫描时钟。 4 使用及实例 4.1 使用注意事项 (1)PS7219上电后,内部RAM清零。显示前应先将亮度寄存器、译码模式寄存器及数据寄存器赋值。 (2)PS7219应连接共阴式LED显示器,没有用的LED显示器位选引脚可以悬空不接。 (3)其显示采用扫描方式,使用普通LED亮度可能不足,可选用高亮型号或超高亮型号。对于尺寸大于0.8英寸的LED,应使用适当的驱动电路。 (4)PS7219的RST复位端应可靠地接到复位电路上去。上电复位信号宽度要求大于100ms,典型复位门限为4.65V。 (5)级联时,如果驱动的LED个数不足8的倍数,可把两片驱动器的扫描界线设置为相同的值。 例如,若需11个LED,则两片PS7219分别联接6和5个,并把两片PS7219的显示位数都设置为6。这样,便不会造成两片PS7219驱动的LED亮度有所差异。 (6)当PS7219级联个数大于8个时,需要增加CLK、LOAD信号的驱动能力。可选用如SN74HC245类似的驱动IC。其具体做法见下面将要举的一实例。 4.2 应用举例 (1)单片应用单片PS7219驱动8位LED的原理图如图3所示。
BFD技术白皮书(迈普)
BFD技术白皮书 本文档介绍了双向转发检测(BFD)技术的原理及应用,BFD是一套用来快速检测的国际标准协议,提供了一种轻负荷,短周期的故障检测。迈普公司已在高端网络产品上实现了BFD技术,可以为用户提供完整的解决方案,从而能够大幅提高网络的服务质量。
目录 1概述 (3) 2 技术简介 (3) 2.1BFD技术原理 (3) 2.2 术语 (4) 3 关键技术 (4) 3.1 报文格式 (4) 3.2 协议状态机 (6) 3.3工作模式 (7) 3.4会话的建立 (8) 4 典型应用 (11) 4.1 BFD加快路由协议收敛 (11) 4.2 BFD加快VRRP协议收敛 (12)
1概述 众所周知,IP网络并不具备秒级以下的间歇性故障修复功能,而传统路由架构在对实时应用(如语音)进行准确故障检测方面能力有限。随着VoIP应用的激增,实现快速网络故障检测和修复越发显得必要。网络设备的一个日益重要的特色就是可以迅速的检测到临近系统之间的通信故障,以便更快的建立或切换到备用路径。在某些环境中由于数据链路硬件的作用可以使故障检测相当的迅速(例如SDH)。但是很多媒介并没有提供这种能力(例如以太),还有一些无法实现端到端的路径检测。 如果硬件不能够对故障检测提供帮助时,网络中将使用缓慢的Hello机制来进行故障检测,这一般是由路由协议来提供。而目前存在的路由协议所能够提供的可以检测到网络故障的最快时间基本都是秒级的,这对于某些应用来说实在是太长了,并且当网络业务达到吉比特时,秒级的故障检测速度将会导致大量数据的丢失。此外,路由协议所提供的Hello机制只有当该路由协议被使用时才有效,并且路由协议所提供的检测含义略有不同——它们检测的是两个路由协议引擎之间路径上的故障。 双向转发检测(Bidirectional Forwarding Detection ,BFD)能大大提高网络的故障检测速度。IETF草案标准BFD提供了一种简单、轻量和抽象的方法,对网络链接能力和系统通信转发功能进行检测。BFD的目标之一就是在临近的转发引擎之间的路径上提供低耗费、短周期的故障检测。而另一个目标则是提供一种专门的机制用于存活检测,适用于任何媒介、任何协议,并为检测周期和耗费提供较宽的选择范围,以避免不同检测方式的重叠。BFD协议的出现,为上述问题提出了一种解决方案,BFD能够在系统之间的任何类型通道上进行故障检测,这些通道包括直连的物理链路,虚电路,隧道,MPLS LSP,多跳路由通道,以及非直连的通道。同时正是由于BFD实现故障检测的简单、单一性,致使BFD能够专注于转发故障的快速检测,使故障检测时间提高到毫秒级。BFD功能实现简单,是针对通信转发故障检测的最好方案。 2 技术简介 2.1BFD技术原理 BFD是一种高速的独立Hello协议,可以用于检测一对邻近系统之间任何类型的路径故障。BFD在一对邻近系统间进行对等会话,一对邻近系统在它们之间建立会话的通道上周期性或间歇性的发送检测报文,如果某个系统在足够长的时间内没有收到对端的检测报文,则
点阵屏驱动程序(MAX7219)
//自己做项目写的2*4点阵屏驱动,分享给大家,基于STC15单片机 点阵屏如上图所示 #include "stc15w4k32s4.h" #define uchar unsigned char #define uint unsigned int //定义Max7219端口 sbit Max7219_pinCLK = P1^7; sbit Max7219_pinCS = P1^6; sbit Max7219_pinDIN = P1^5; void Write_Max7219_byte(uchar DATA); //向MAX7219(U3)写入字节void Write_Max7219(uchar address,uchar dat); //向MAX7219写入数据 void Init_MAX7219(void); //初使化函数 void Display_1(uchar dat); //1号屏显示数字 void Display_2(uchar dat); //2号屏显示数字 void Display_3(uchar dat); //3号屏显示数字 void Display_4(uchar dat); //4号屏显示数字 void Display_5(uchar dat); //5号屏显示数字 void Display_6(uchar dat); //6号屏显示数字 void Display_7(uchar dat); //7号屏显示数字
void Display_8(uchar dat); //8号屏显示数字、 /* 8个点阵驱动程序 */ uchar code disp1[38][8] ={ {0x00,0x30,0x48,0x48,0x48,0x48,0x48,0x30}, //0 {0x00,0x10,0x30,0x10,0x10,0x10,0x10,0x38}, //1 {0x00,0x78,0x08,0x08,0x78,0x40,0x40,0x78}, //2 {0x00,0x78,0x08,0x08,0x78,0x08,0x08,0x78}, //3 {0x00,0x10,0x30,0x50,0x78,0x10,0x10,0x10}, //4 {0x00,0x78,0x40,0x40,0x78,0x08,0x08,0x78}, //5 {0x00,0x78,0x40,0x40,0x78,0x48,0x48,0x78}, //6 {0x00,0x7C,0x04,0x08,0x10,0x10,0x10,0x10}, //7 {0x00,0x78,0x48,0x48,0x78,0x48,0x48,0x78}, //8 {0x00,0x78,0x48,0x48,0x78,0x08,0x08,0x78}, //9 {0}, //显示空白10 {0x00,0x00,0x00,0x00,0x7e,0x00,0x00,0x00}, //显示负数符号11 {0x00,0x7C,0x40,0x40,0x7C,0x40,0x40,0x7C}, //E 12 {0x00,0x78,0x44,0x44,0x7C,0x48,0x48,0x44}, //R 13 {0x10,0x28,0x44,0x44,0x44,0x7C,0x44,0x44}, //A 14 {0x00,0x40,0x40,0x40,0x40,0x40,0x40,0x78}, //L 15 {0x00,0x70,0x88,0x80,0x80,0x80,0x88,0x70}, //C 16 }; //-------------------------------------------- //功能:向MAX7219(U3)写入字节 //入口参数:DATA //出口参数:无 //说明: void Write_Max7219_byte(uchar DATA) { uchar i; Max7219_pinCS=0; for(i=8;i>=1;i--) { Max7219_pinCLK=0; Max7219_pinDIN=DATA&0x80; DATA=DATA<<1; Max7219_pinCLK=1; } } //------------------------------------------- //功能:向MAX7219写入数据 //入口参数:address、dat
TL494CN中文资料原理及应用技巧
TL494主要特征 集成了全部的脉宽调制电路。片内置线性锯齿波振荡器,外置振荡元件仅两个(一个电阻和一个电容)内置误差放大器。 内止5V 参考基准电压源。 可调整死区时间。 内置功率晶体管可提供500mA的驱动能力。 推或拉两种输出方式。 TL494外形图 TL494引脚图 TL494工作原理简述 TL494是一个固定频率的脉冲宽度调制电路,内置了线性锯齿波振荡器,振荡频率可通过外部的一个电阻和一个电容进行调节,其振荡频率如下: 输出脉冲的宽度是通过电容CT上的正极性锯齿波电压与另外两个控制信号进行比较来实现。功率输出管Q1和Q2受控于或非门。当双稳触发器的时钟信号为低电平时才会被选通,即只有在锯齿波电压大于控制信号期间才会被选通。当控制信号增大,输出脉冲的 宽度将减小。参见图2。 TL494脉冲控制波形图
控制信号由集成电路外部输入,一路送至死区时间比较器,一路送往误差放大器的输入端。死区时间比较器具有120mV勺输入补偿电压,它限制了最小输出死区时间约等于锯齿波周期的4%,当输出端接地,最大输出占空比为96%,而输出端接参考电平时,占空比为48%。当把死区时间控制输入端接上固定的电压(范围在0—之间)即能在输出脉冲上产生附加的死区时间。 脉冲宽度调制比较器为误差放大器调节输出脉宽提供了一个手段:当反馈电压从变化到时,输出的脉冲宽度从被死区确定的最大导通百分比时间中下降到零。两个误差放大器具有从到()的共模输入范围,这可能从电源的输出电压和电流察觉得到。误差放大器的输出端常处于高电平,它与脉冲宽度调制器的反相输入端进行“或”运算,正是这种电路结构,放大器只需最小的输出即可支配控制回路。 当比较器CT放电,一个正脉冲出现在死区比较器的输出端,受脉冲约束的双稳触发器进行计时,同时停止输出管Q1和Q2的工作。若输出控制端连接到参考电压源,那么调制脉冲交替输出至两个输出晶体管,输出频率等于脉冲振荡器的一半。如果工作于单端状态,且最大占空比小于50%时,输出驱动信号分别从晶体管Q1或Q2取得。输出变压器一个反馈绕组及二极管提供反馈电压。在单端工作模式下,当需要更高的驱动电流输出,亦可将Q1和Q2并联使用,这时,需将输出模式控制脚接地以关闭双稳触发器。 这种状态下,输出的脉冲频率将等于振荡器的频率。
《自动控制原理及应用》
中国农业大学继续教育学院《自动控制原理及其应用》试卷 专业 姓名 成绩 一.填空题(每空0.5分,共25分) 1、反馈控制又称偏差控制,其控制作用是通过 与反馈量的差值进行的。 2、复合控制有两种基本形式:即按 的前馈复合控制和按 的前馈复合控制。 3、若某系统的单位脉冲响应为0.20.5()105t t g t e e --=+,则该系统的传递函数G(s)为 。 4、根轨迹起始于 ,终止于 。 5、设某最小相位系统的相频特性为101()()90()tg tg T ?ωτωω--=--,则该系统的开环传递函数为 。 6、PI 控制器的输入-输出关系的时域表达式是 ,其相应的传递函数为 ,由于积分环节的引入,可以改善系统的 性能。 7、在水箱水温控制系统中,受控对象为 ,被控量为 。 8、自动控制系统有两种基本控制方式,当控制装置与受控对象之间只有顺向作用而无反向联系时,称为 ;当控制装置与受控对象之间不但有顺向作用而且还有反向联系时,称为 ;含有测速发电机的电动机速度控制系统,属于 。 9、稳定是对控制系统最基本的要求,若一个控制系统的响应曲线为衰减振荡,则该系统 。判断一个闭环线性控制系统是否稳定,在时域分析中采用 ;在频域分析中采用 。 10、传递函数是指在 初始条件下、线性定常控制系统的 与 之比。 11、频域性能指标与时域性能指标有着对应关系,开环频域性能指标中的幅值穿越频率c ω对应时域性能指标 ,它们反映了系统动态过程的 。 12、对自动控制系统的基本要求可以概括为三个方面,即: 、快速性和 。 13、控制系统的 称为传递函数。一阶系统传函标准是 ,二阶系统传函标准形式是 。 14、在经典控制理论中,可采用 、根轨迹法或 等方法判断线性控制系统稳定性。 15、控制系统的数学模型,取决于系统 和 , 与外作用及初始条件无关。 16、线性系统的对数幅频特性,纵坐标取值为 ,横坐标为 。 17、在二阶系统的单位阶跃响应图中,s t 定义为 。%σ是 。 18、PI 控制规律的时域表达式是 。P I D 控制规律的传递函数表达式是 。 19、对于自动控制系统的性能要求可以概括为三个方面,即: 、 和 ,其中最基本的要求是 。 20、若某单位负反馈控制系统的前向传递函数为()G s ,则该系统的开环传递函数为 。 21、能表达控制系统各变量之间关系的数学表达式或表示方法,叫系统的数学模型,在古典控制理论中系统数学模型有 、 等。 22、判断一个闭环线性控制系统是否稳定,可采用 、 、 等方法。 23、PID 控制器的输入-输出关系的时域表达式是 ,其相应的传递函数为 。 24、最小相位系统是指 。 二. 选择题(每题1分,共22分) 1、采用负反馈形式连接后,则 ( ) A 、一定能使闭环系统稳定; B 、系统动态性能一定会提高; C 、一定能使干扰引起的误差逐渐减小,最后完全消除; D 、需要调整系统的结构参数,才能改善系统性能。 2、下列哪种措施对提高系统的稳定性没有效果 ( )。 A 、增加开环极点; B 、在积分环节外加单位负反馈; C 、增加开环零点; D 、引入串联超前校正装置。 3、对于以下情况应绘制0°根轨迹的是( ) A 、主反馈口符号为“-” ; B 、除r K 外的其他参数变化时; C 、非单位反馈系统; D 、根轨迹方程(标准形式)为1)()(+=s H s G 。 4、开环频域性能指标中的相角裕度γ对应时域性能指标( ) 。 A 、超调%σ B 、稳态误差ss e C 、调整时间s t D 、峰值时间p t 5、已知开环幅频特性如图2所示, 则图中不稳定的系统是( )。 系统① 系统② 系统③ A 、系 统 ① B 、系统② C 、系统③ D 、都不稳定 6、若某最小相位系统的相角裕度 γ >,则下列说法正确的是 ( )。 A 、不稳定; B 、只有当幅值裕度 1 g k >时才稳定; C 、稳定; D 、不能判用相角裕度判断系统的稳定性。
TL494中文资料及应用电路Microsoft Word 文档
TL494中文资料及应用电路Microsoft Word 文档TL494中文资料及应用电路 TL494常应用于电源电路当中,在本站的文章中,除了 TL494是一种固定频率脉宽调制电路,它包含了开关电源控制所需的全部功能,广泛应用于单端正激双管式、半桥式、全桥式开关电源。TL494有SO-16和PDIP-16两种封装形式,以适应不同场合的要求。其主要特性如下: TL494主要特征 集成了全部的脉宽调制电路。 片内置线性锯齿波振荡器,外置振荡元件仅两个(一个电阻和一个电容)。 内置误差放大器。 内止5V参考基准电压源。 可调整死区时间。 内置功率晶体管可提供500mA的驱动能力。 推或拉两种输出方式。 TL494外形图 TL494引脚图 TL494工作原理简述 TL494是一个固定频率的脉冲宽度调制电路,内置了线性锯齿波振荡器,振荡频率可通过外部的一个电阻和一个电容进行调节,其振荡频率如下: 输出脉冲的宽度是通过电容CT上的正极性锯齿波电压与另外两个控制信号进行比较来实现。功率输出管Q1和Q2受控于或非门。当双稳触发器的时钟信号为低电平时才会被选通,即只有在锯齿波电压大于控制信号期间才会被选通。当控制信号增大,输出脉冲的宽度将减小。参见图2。
TL494脉冲控制波形图 控制信号由集成电路外部输入,一路送至死区时间比较器,一路送往误差放大器的输入端。死区时间比较器具有120mV的输入补偿电压,它限制了最小输出死区时间约等于锯齿波周期的4%,当输出端接地,最大输出占空比为96%,而输出端接参考电平时,占空比为48%。当把死区时间控制输入端接上固定的电压(范围在0—3.3V之间)即能在输出脉冲上产生附加的死区时间。 脉冲宽度调制比较器为误差放大器调节输出脉宽提供了一个手段:当反馈电压从0.5V变化到3.5时,输出的脉冲宽度从被死区确定的最大导通百分比时间中下降到零。两个误差放大器具有从-0.3V到(Vcc-2.0)的共模输入范围,这可能从电源的输出电压和电流察觉得到。误差放大器的输出端常处于高电平,它与脉冲宽度调制器的反相输入端进行“或”运算,正是这种电路结构,放大器只需最小的输出即可支配控制回路。 当比较器CT放电,一个正脉冲出现在死区比较器的输出端,受脉冲约束的双稳触发器进行计时,同时停止输出管Q1和Q2的工作。若输出控制端连接到参考电压源,那么调制脉冲交替输出至两个输出晶体管,输出频率等于脉冲振荡器的一半。如果工作于单端状态,且最大占空比小于50%时,输出驱动信号分别从晶体管Q1或Q2取得。输出变压器一个反馈绕组及二极管提供反馈电压。在单端工作模式下,当需要更高的驱动电流输出,亦可将Q1和Q2并联使用,这时,需将输出模式控制脚接地以关闭双稳触发器。这种状态下,输出的脉冲频率将等于振荡器的频率。 TL494内置一个5.0V的基准电压源,使用外置偏置电路时,可提供高达10mA 的负载电流,在典型的0—70?温度范围50mV温漂条件下,该基准电压源能提 供?5%的精确度。 TL494内部电路方框图
51单片机程序 MAX7219
#include
TL494工作原理与应用
TL494是一种固定频率脉宽调制电路,它包含了开关电源控制所需的全部功能,广泛应用于单端正激双管式、半桥式、全桥式开关电源。TL494有SO-16和PDIP-16两种封装形式,以适应不同场合的要求。其主要特性如下: TL494主要特征 集成了全部的脉宽调制电路。 片内置线性锯齿波振荡器,外置振荡元件仅两个(一个电阻和一个电容)。 内置误差放大器。 内止5V参考基准电压源。 可调整死区时间。 内置功率晶体管可提供500mA的驱动能力。 推或拉两种输出方式。 TL494外形图 TL494引脚图
TL494工作原理简述 TL494是一个固定频率的脉冲宽度调制电路,内置了线性锯齿波振荡器,振荡频率可通过外部的一个电阻和一个电容进行调节,其振荡频率如下: 输出脉冲的宽度是通过电容CT上的正极性锯齿波电压与另外两个控制信号进行比较来实现。功率输出管Q1和Q2受控于或非门。当双稳触发器的时钟信号为低电平时才会被选通,即只有在锯齿波电压大于控制信号期间才会被选通。当控制信号增大,输出脉冲的宽度将减小。参见图2。
TL494脉冲控制波形图 控制信号由集成电路外部输入,一路送至死区时间比较器,一路送往误差放大器的输入端。死区时间比较器具有120mV的输入补偿电压,它限制了最小输出死区时间约等于锯齿波周期的4%,当输出端接地,最大输出占空比为96%,而输出端接参考电平时,占空比为48%。当把死区时间控制输入端接上固定的电压(范围在0—3.3V之间)即能在输出脉冲上产生附加的死区时间。 脉冲宽度调制比较器为误差放大器调节输出脉宽提供了一个手段:当反馈电压从0.5V变化到3.5时,输出的脉冲宽度从被死区确定的最大导通百分比时间中下降到零。两个误差放大器具有从-0.3V到(Vcc-2.0)的共模输入范围,这可能从电源的输出电压和电流察觉得到。误差放大器的输出端常处于高电平,它与脉冲宽度调制器的反相输入端进行“或”运算,正是这种电路结构,放大器只需最小的输出即可支配控制回路。 当比较器CT放电,一个正脉冲出现在死区比较器的输出端,受脉冲约束的双稳触发器进行计时,同时停止输出管Q1和Q2的工作。若输出控制端连接到参考电压源,那么调制脉冲交替输出至两个输出晶体管,输出频率等于脉冲振荡器的一半。如果工作于单端状态,且最大占空比小于50%时,输出驱动信号分别从晶体管Q1或Q2取得。输出变压器一个反馈绕组及二极管提供反馈电压。在单端工作模式下,当需要更高的驱动电流输出,亦可将Q1和Q2并联使用,这时,需将输出模式控制脚接地以关闭双稳触发器。这种状态下,输出的脉冲频率将等于振荡器的频率。 TL494内置一个5.0V的基准电压源,使用外置偏置电路时,可提供高达10mA的负载电流,在典型的0—70℃温度范围50mV温漂条件下,该基准电压源能提供±5%的精确度。 TL494内部电路方框图
TL494介绍及其应用
TL494介绍及其应用 TL494是美国德州仪器公司生产的一种电压驱动型脉宽调制控制集成电路,主要应用在各种开关电源中。本文介绍它与相应的输入、输出电路等一起构成一个单回路控制器。 1、TL494管脚配置及其功能 TL494的内部电路由基准电压产生电路、振荡电路、间歇期调整电路、两个误差放大器、脉宽调制比较器以及输出电路等组成。图1是它的管脚图,其中1、2脚是误差放大器I的同相和反相输入端;3脚是相位校正和增益控制;4脚为间歇期调理,其上加0~3.3V电压时可使截止时间从2%线怀变化到100%;5、6脚分别用于外接振荡电阻和振荡电容;7脚为接地端;8、9脚和11、10脚分别为TL494内部两个末级输出三极管集电极和发射极;12脚为电源供电端;13脚为输出控制端,该脚接地时为并联单端输出方式,接14脚时为推挽输出方式;14脚为5V基准电压输出端,最大输出电流10mA;15、16脚是误差放大器II 的反相和同相输入端。
2、回路控制器工作原理 回路控制器的方框图如图2所示。被控制量(如压力、流量、温度等)通过传感器交换为0~5V的电信号,作为闭环回路的反馈信号,通过有源简单二阶低通滤波电路进行平滑、去除杂波干扰后送给TL494的误差放大器I的IN+同相输入端。设定输入信号是由TL494的5V基准电压源经一精密多圈电位器分压,由电位器动端通过有源简单二阶低通滤波电路接入TL494的误差放大器I的IN-反相输入端。反馈信号和设定信号通过TL494的误差放大器I进行比较放大,进而控制脉冲宽度,这个脉冲空度变化的输出又经过整流滤波电路及由集成运算放大器构成的隔离放大电路进行平滑和放大处理,输出一个与脉冲宽度成正比的、变化范围为0~10V的直流电压。这个电压就是所需要的输出控制电压,用它去控制执行电路,及时调整被控制量,使被控制量始终与设定值保持一致,形成闭环单回路控制。 用TL494实现的单回路控制器的电路原理图如图3所示。 2.1 输入电路 两个运算放大器IC1A、IC1B都接成有源简单二阶低通滤电路,分别作为反馈信号输入和设定信号输入的处理电路。在电路设计上,两个输入电路采取完全对称的形式。将有源简单二阶低通滤波电路的截止频率fp设计为4Hz,根据有
MAX7219工作原理简介
MAX7219工作原理简介 MAX7219是一个采用3线串行接口的8位共阴极7段LED显示驱动器。本文分析了MAX7219各个寄存器的功能,并结合MAX7219的工作时序,给出了MAX7219在Motorola MC68HC908单片机系统中的一个应用实例。关键词: MCU;MAX7219;LED Motorola MC68HC908 MAX7219工作时序及其寄存器 MAX7219是一个高性能的多位LED显示驱动器,可同时驱动8位共阴极LED或64个独立的LED。其内部结构框图如图1所示,主要包括移位寄存器、控制寄存器、译码器、数位与段驱动器以及亮度调节和多路扫描电路等。 MAX7219 采用串行接口方式,只需LOAD、DIN、CLK三个管脚便可实现数据传送。DIN管脚上的16位串行数据包不受LOAD状态的影响,在每个CLK的上升沿被移入到内部16位移位寄存器中。然后,在LOAD的上升沿数据被锁存到数字或控制寄存器中。LOAD必须在第16个时钟上降沿或之后,但在下一个时钟上升沿之前变高,否则数据将会丢失。DIN端的数据通过移位寄存器传送,并在16.5个时钟周期后出现在DOUT端,随CLK 的下降沿输出。 MAX7219的操作时序如图2所示。 MAX7219的串行数据标记为D15~D0,其中低8位表示显示数据本身,最高的4位D15~D12未使用,寻址内部寄存器的地址位占用D11~D8,选择14个内部寄存器,见表1。 图1 MAX7219内部结构框图 图2 MAX7219的数据传送时序 MAX7219 内部具有14个可寻址数字和控制寄存器。其中的8个数字寄存器由一个片内8×8双端口SRAM实现。它们可直接寻址,因此可对单个数进行更新并且通常只要 V+超过2V数据就可保留下去。除8个数位寄存器之外,还有无操作、译码方式、亮度调整、扫描位数、睡眠模式和显示器测试6个控制寄存器。 无操作寄存器用于多片MAX7219级联,在不改变显示或不影响任意控制寄存器条件下,它允许数据从DIN传送到DOUT。 睡眠模式控制寄存器用于节省电源消耗,延长显示器的使用寿命。当睡眠模式控制寄存器控制字节中的最低位D0=0时,为睡眠模式;D0=1时,为正常操作模式。上电时所有的控制寄存器都复位,显示器都熄灭,芯片
透彻分析利用TL494组成的逆变器电路
透彻分析利用TL494组成的逆变器电路 现在利用TL494组成400W大功率稳压逆变器电路,它的激式变换部分是采用TL494和VT1、VT2、VD3、VD4一起构成灌电流驱动电路,驱动两路各配两只60V/30A的MOSFET开关管。需提高输出功率时,每路可采用3~4只开关管并联使用,整体电路也不变。TL494在逆变器中的应用方法如下: ?第1、2脚构成稳压取样、误差放大系统,正相输入端1脚输入逆变器次级取样绕组整流输出的15V直流电压,经R1、R2分压,使第1脚在逆变器正常工作时有近4.7~5.6V取样电压。反相输入端2脚输入5V基准电压(由14脚输出)。当输出电压降低时,1脚电压降低,误差放大器输出低电平,通过PWM电路使输出电压升高。正常时1脚电压值为5.4V,2脚电压值为 5V,3脚电压值为0.06V。此时输出AC电压为235V(方波电压)。第4脚外接R6、R4、C2设定死区时间。正常电压值为0.01V。第5、6脚外接 CT、RT设定振荡器三角波频率为100Hz。正常时5脚电压值为1.75V,6脚电压值为3.73V。第7脚为共地。第8、11脚为内部驱动输出三极管集电极,第12脚为TL494前级供电端,此三端通过开关S控制TL494的启动/停止,作为逆变器的控制开关。当S1关断时,TL494无输出脉冲,因此开关管 VT4~VT6无任何电流。S1接通时,此三脚电压值为蓄电池的正极电压。第9、10脚为内部驱动级三极管发射极,输出两路时序不同的正脉冲。正常时电压值为1.8V。第13、14、15脚其中14脚输出5V基准电压,使13脚有 5V高电平,控制门电路,触发器输出两路驱动脉冲,用于推挽开关电路。第15脚外接5V电压,构成误差放大器反相输入基准电压,以使同相输入端16脚构成高电平保护输入端。此接法中,当第16脚输入大于5V的高电平时,
策略路由配置与BFD讲课讲稿
策略路由配置与BFD 38.1 理解策略路由 38.1.1 策略路由概述 策略路由 ( PBR :Policy-Based Routing )提供了一种比基于目的地址进行路由转发更加灵活的数据包路由转发机制。策略路由可以根据IP/IPv6 报文源地址、目的地址、端口、报文长度等内容灵活地进行路由选择。 现有用户网络,常常会出现使用到多个ISP ( Internet Server Provider ,Internet 服务提供商)资源的情形,不同ISP 申请到的带宽不一;同时,同一用户环境中需要对重点用户资源保证等目的,对这部分用户不能够再依据普通路由表进行转发,需要有选择的进行数据报文的转发控制,因此,策略路由技术即能够保证ISP 资源的充分利用,又能够很好的满足这种灵活、多样的应用。 IP/IPv6 策略路由只会对接口接收的报文进行策略路由,而对于从该接口转发出去的报文不受策略路由的控制;一个接口应用策略路由后,将对该接口接收到的所有包进行检查,不符合路由图任何策略的数据包将按照普通的路由转发 进行处理,符合路由图中某个策略的数据包就按照该策略中定义的操作进行转发。 一般情况下,策略路由的优先级高于普通路由,能够对IP/IPv6 报文依据定义的策略转发;即数据报文先按照IP/IPv6 策略路由进行转发,如果没有匹配任意一个的策略路由条件,那么再按照普通路由进行转发。用户也可以配置策略 路由的优先级比普通路由低,接口上收到的IP/IPv6 报文则先进行普通路由的转发,如果无法匹配普通路由,再进 行策略路由转发。 用户可以根据实际情况配置设备转发模式,如选择负载均衡或者冗余备份模式,前者设置的多个下一跳会进行负载均衡,还可以设定负载分担的比重;后者是应用多个下一跳处于冗余模式,即前面优先生效,只有前面的下一跳无效 时,后面次优的下一跳才会生效。用户可以同时配置多个下一跳信息。 策略路由可以分为两种类型:一、对接口收到的IP 报文进行策略路由。该类型的策略路由只会对从接口接收的报 文进行策略路由,而对于从该接口转发出去的报文不受策略路由的控制; 二、对本设备发出的IP 报文进行策略路由。该类型策略路由用于控制本机发往其它设备的IP 报文,对于外部设备 发送给本机的IP 报文则不受该策略路由控制。 38.1.2 策略路由基本概念/特性 38.1.2.1 策略路由应用过程 应用策略路由,必须先创建路由图,然后在接口上应用该路由图。一个路由图由很多条策略组成,每条策略都有对应的序号( Sequence ),序号越小,该条策略的优先级越高。 每条策略又由一条或者多条match 语句以及对应的一条或者多条set 语句组成。match 语句定义了IP/IPv6 报文的匹配规则,set 语句定义了对符合匹配规则的IP/IPv6 报文处理动作。在策略路由转发过程,报文依优先级从高到底依次匹配,只要匹配前面的策略,就执行该策略对应的动作,然后退出策略路由的执行。