工控软件介绍
TwinCAT 工控软件介绍
?标准的Windows NT 4.0操作系统
?IEC 1131-3PLC国际标准,涵盖五种常用编程语言,功能强,操作容易。不必购买专用编程软件即可实现在PC机上操作PLC的梦想
?控制分布式I/O,支持各种现场总线标准
?可通过OCX接口用VB、VC等开发上层管理软件或与其他工业管理软件集成,产生动态显示、报表统计、历史趋势图等,改善质量监控和车间管理。
2. 多任务实时控制,具有强大的功能
TwinCAT可对PLC,PID,I/O,CNC轴位控制及用户需要完成的特殊任务进行多任务的时间安排,并且在一台PC机上可同时运行多个逻辑PLC,每个任务独立运行,互不干扰。TWinCAT系统的分辩率为100微秒。
TwinCAT系统的基本配置要求:
?486处理器或更高
?至少16MB内存
?Windows NT 4.0操作系统
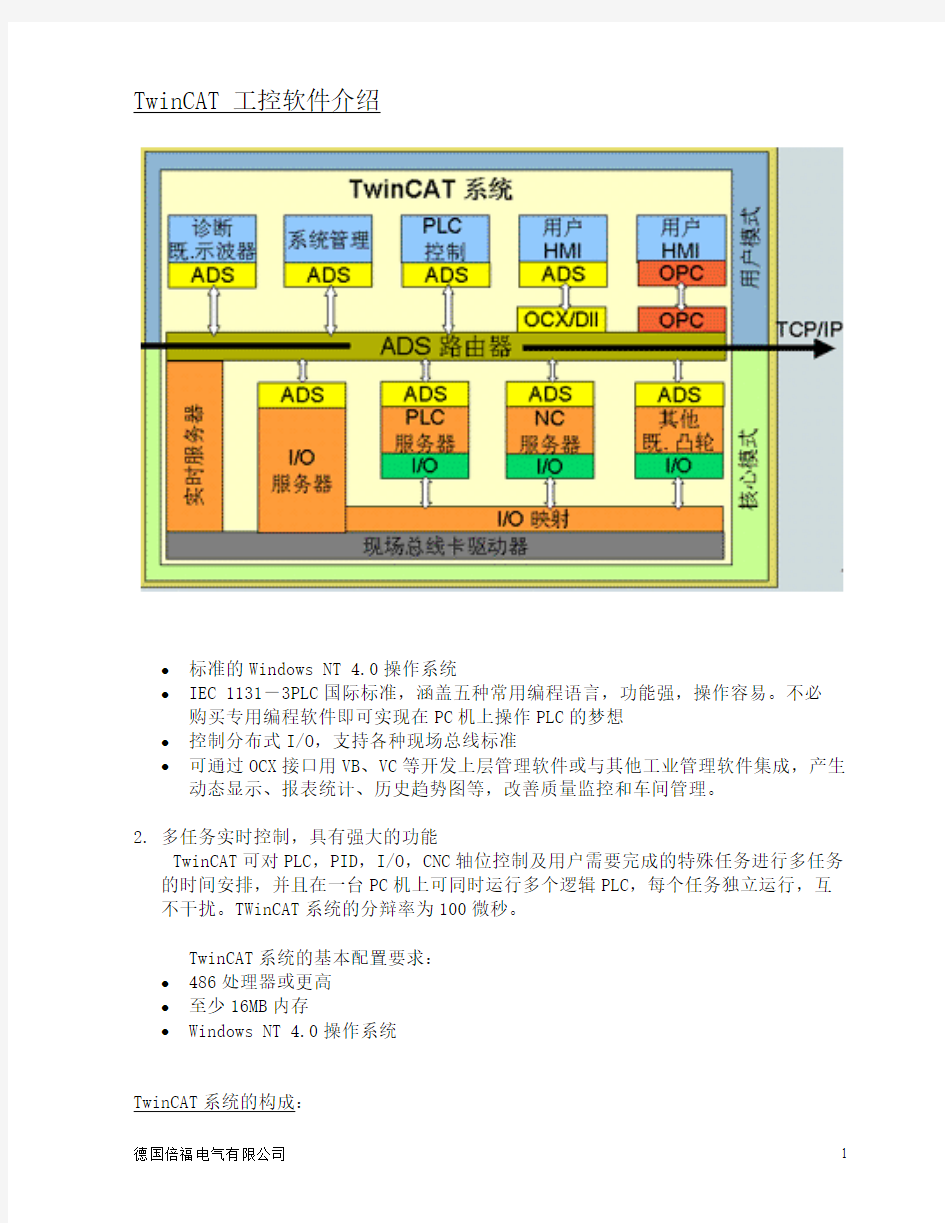
TwinCAT系统的构成:
TwinCAT系统由实时服务器(Realtime Server),系统控制器(System Control)系统OCX接口,系统工具箱(System Toolbox), PLC系统,CNC系统,输入输出系统(I/O System),用户应用软件开发系统(User Appl.),自动化设备规范接口(ADS-Interface) 及自动化信息路由器 (AMS Router)等组成。现对各个部分分述如下:
实时服务器
TwinCAT实时服务器的主要功能是确保实时自动化任务与WindowsNT操作系统同时运行,使Windows NT下的实时部分充分利用PC机处理器的有效能力独立运行。
系统控制器
T WinCAT系统控制器负责对系统进行组态,对单个任务作必要的适应性配置。在
PC机上装载实时任务应遵守下列特殊规则:
?确保基本的Windows任务正常运行
?可对实时容量进行调节
?保证Windows NT的功能不受影响并保持待用状态
?提供进一步的安全机制
系统OCX接口
作为对控制器的一种扩展,WinCAT系统OCX接口是Windows程序(比如Visual
Basic)。与各个任务之间的接口,它使VB等Windows程序可以访问和存取系统控
制器中的数据。
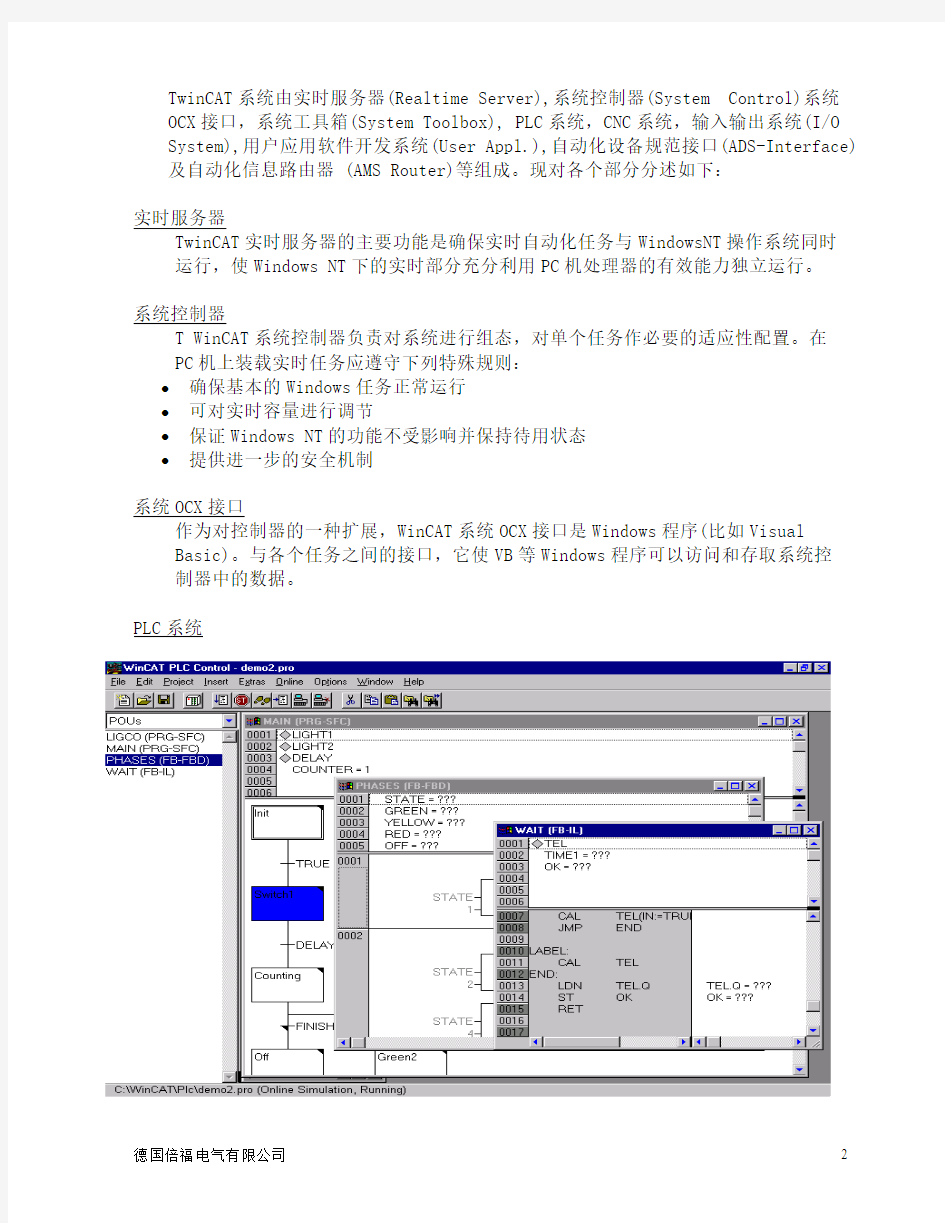
PLC系统
TwinCAT PLC系统是Windows NT环境下的一种多任务PLC软件,支持所有IEC 1131-3编程语言。PLC任务可在中央处理器上执行,也可在分散的CPU上执行。
其主要功能特点如下:
1. 允许你根据IEC1131-3去编程,支持下列五种语言:
语句表/汇编语言(IL),功能框图(FBD),梯形图(LD),顺序功能流程图 (SFC),结构化文本(ST)
2. 具有模块化程序管理的结构化编程
3. 对运行中的PLC进行再编译而无数据丢失
4. 可进行增量编译,PLC仿真
5. 程序、数据和处理映像的在线状态显示
6. 带触发器,可强制数据,设断点,单步运行
7. 最多可设16个PLC任务
8. 借助PC处理器可快速执行命令
9. 定时器、计数器、内存量和程序长度不受限制
10. 处理映像的大小:65535个输入字节,65535个输出字节
TwinCAT 数控系统
TwinCAT数控系统由开放式CNC编程环境下的CNC控制和一个用于轴位控制的实时CNC服务器组成。它支持DIN66025等CNC编程标准,并提供PTP功能和连续路径控制功能。它利用PC机的性能,使得在Windows NT环境下控制轴的位移成为可能。
TwinCAT数控系统的功能特点如下:
1. 最多可达到256个逻辑轴通道(视处理器的能力而定)
2. 最多可达到256个逻辑移动轴(视处理器的能力而定)
3. 最多可达到256个逻辑旋转轴(视处理器的能力而定)
4. 可调整循环周期时间(从500μ s 起)
5. 采用动态预估算法,以使滞后距离减到最小
6. 预估和超驰功能
7. 3D连续路径插补:线形、圆形、螺旋形及其他方式
8. 主/从轴:切线轴、电子调速、同步轴
9. 带有冲击控制的加速
10.可与T WinCAT PLC集成,最多可设置16个PLC任务
11.可供用户程序使用的内存,仅受PC机内存的限制
TwinCAT CNC控制的编程方法:
?操作简便的DIN66025编辑器
?表格或图形编程
?循环编程
作为CNC控制的扩展功能,TwinCAT CNC OCX为Windows程序(如Visual Basic) 提供进入CNC服务器的访问接口。在AMS/ADS系统中所指定的对象特性使得CNC控制系统通过 T WinCAT信息路由器与其他TwinCAT对象进行通信成为可能。用户界面可用 WinCAT对象进行通信成为可能。用户界面可用
Visual Basic, C++或其他可视化软件来编制。
TwinCAT信息路由器
TwinCAT系统由带开放接口的一些软件目标组成,而T WinCAT信息路由器则使这些软件目标能在实时状态下交换信息。软件目标由开放的自动化设备规范(ADS)来定义,这使得识别和访问PLC目标,CNC目标或PID目标成为可能。与实时服务器的通信为存取数据提供了开放的 Windows 接口。
TwinCAT系统内部的信息交换由TwinCAT信息路由器根据自动化信息规范(AMS)来组织,它主要体现在以下几个方面:
1. 目标之间的信息由实时路由器来管理。
2. 软件目标之间可存在逻辑通信关系。
3. 所有T WinCAT编程环境均使用T WinCAT信息路由器。
4. C++对象可被完全连接。
5. Windows应用程序可通过开放的Windows接口(如OLE,OCX,Activ X)
访问信息路由器和实时服务器。
6. TwinCAT信息路由器包括TCP/IP接口,串口和现场总线接口,这就意味着,
不必做其他附加工作即可把各种分布式T WinCAT控制系统(PLC,CNC,PID等)
与相应的 TwinCAT服务器系统连接在一起。连接Windows程序的标准化OLE
接口也可供选用。
TwinCAT I/O系统
TwinCAT I/O系统的主要功能如下:
1. 它提供了访问本地I/O和各种现场总线的通道,并且也可以用一个公共处理映像
来处理多种现场总线。
2. 通过TwinCAT I/O Control对I/O进行管理和寻址,并把I/O数据分配给所有与 TwinCAT系统相连接的I/O单元,你可用逻辑名去访问I/O通道。
3. 通过TwinCAT I/O匹配器(I/O Mapper)简化了对I/O组态的管理:根据需要你可
以有选择地访问位、字节和字,每个地址映像的产生由WinCAT I/O系统来组织。
4. 作为对I/O控制的扩展,T WinCAT I/O OCX给Windows程序(如Visual Basic)提供
了访问I/O匹配器的接口。
TwinCAT用户应用程序系统
TwinCAT用户应用程序系统为把用户应用程序集成在T WinCAT实时环境下打下
了基础。用户所需要的每一个功能均可成为T WinCAT系统的一个软件目标并具备T
WinCAT家族的所有特性和接口:
1. 用户软件可以被完全集成在T WinCAT系统中。
2. C++目标设计允许单独编译。
3. 可以使用属于操作系统的工具和C++编译器。
4. 用户程序成为TwinCAT实时服务器管理下的一个任务。
TwinCAT UA Control借助于由AMS/ADS所规定的通信功能可以编写适合特殊应用的用户界面:
?TwinCAT用户应用程序系统提供给用户一个框架,该框架有一个集成的AMS/ ADS接口,这就是说,用户应用程序将成为T WinCAT的一个部分,因而它也可以访问T WinCAT信息路由器,即系统中的所有对象均可以与用户应用程序交换信息,并且用户程序也可以存取过程数据和系统数据。
?作为对UA Control的扩展,TwinCAT UA OCX给Windows程序(如Visual Basic)提供了访问用户应用程序服务器的接口。