Soccer Ball Tracking using Dynamic Kalman Filter with Velocity Control

Soccer Ball Tracking using Dynamic Kalman Filter with Velocity Control
Jong-Yun Kim, Tae-Yong Kim
GSAIM, Chung-Ang Univ South Korea
{ idsrge@https://www.360docs.net/doc/606907116.html,, kimty@cau.ac.kr }
Abstract
In this paper, we propose the ball tracking method that is tracking the ball adaptively and robustly in the soccer video. In the latest works, people have used the Typical Kalman Filter to track the ball. But when the ball is disappearing due to the occlusion with players, Typical Kalman Filter has no choice but to make a pool prediction and especially if the player take the ball for a long time, the error is produced much more. To overcome these problems, we propose the Dynamic Kalman Filter algorithm. Dynamic Kalman Filter robustly tracks a ball in the dynamic condition by using player information and reduces the error in the situation of occlusion by controlling the velocity of the state vector. The experimental results show that proposed Dynamic Kalman Filter shows better results than the Typical Kalman Filter and the Adaptive Kalman Filter that is proposed to overcome occlusion problem in the video sequence.
Keywords--- Dynamic Kalman Filter, Ball Tracking, Velocity Control
1. Introduction
In the past few years, the tracking object in the video sequence is very important issue. Especially, analysis and tracking the moving object in the sports video is one of the most popular researching parts in many kinds of video sequence because we use these works for the analysis of tactics and of player's moving pattern in the games and the soccer is most famous sports in the world, so tracking object in the soccer video becomes more meaningful work than any other sports videos.
Targets of tracking in the soccer video are the player and the ball mostly. Tracking the movement of the player is very important researching part because it can be applied to know the strategy of attacking and defense of teams. Tracking the player in the soccer video has been studied in the [1]-[4] and they have used the color, shape, location of player as information of tracking. Tracking a ball in the soccer video is also very important because it can be applied to know the ratio of sharing the ball and which team has superiority in the game and also we can track the viewer's ROI (Region of Interest) part by chasing a ball position in the soccer video. But it is very difficult to detect and track the ball in the soccer video because the size of the ball is too small and it has only a little amount of features. So many researchers study the method to solve these problems recently.
In the past time, people used the feature of appearance of the object, seems like a color, shape, size, texture to track the ball in the video. T. D'Orazio used the information of color of ball and [7] Xiao-Feng Tong detected the ball using feature of circularity of object [6] and D. Liang used the weighted sum of feature information for evaluation value to detect the ball in the soccer video [8] and K. Seo used the feature of appearance of a ball and he thought that the ball must be tracked on the longest time in the soccer video. So he tracked the ball using these features [5]. But there are many objects that are similar in shape with the ball in the soccer video, for example line, socks of players, and distortion of an image, so it is not robust method using the simple feature of appearance of the ball in the single frame. Therefore other researchers used not only features of appearance but also trajectory information in the consecutive frames. One of the most used methods to track the ball trajectory is Kalman Filter algorithm which is very famous method in the object tracking, and used in the [9]-[11] to track a ball in the soccer video. In the [9], X. Yu tracked a ball using Kalman Filter-based Template matching algorithm and chased trajectory of ball candidates and selected the best trajectory by using some evaluation methods [10], [11]. This method shows a better result than previous methods because it is comparatively robust to track the ball in the bad condition when that appearance of a ball is changed during several consecutive frames. But Typical Kalman Filter couldn't get a good prediction or miss the target when a ball is occluded with the player or field line. Then this bad prediction also gives negative effects to the next prediction. Therefore the error is accumulated frame by frame and Kalman prediction is not corrected. So we need to get more robust method to track the ball in the dynamic condition in the soccer video. Hence in this paper, we propose a Dynamic Kalman Filter algorithm for tracking a ball more robustly.
2009 Sixth International Conference on Computer Graphics, Imaging and Visualization
2. The Typical Kalman Filter
First we investigate the problems of ball tracking
using the Typical Kalman Filter. In the Typical Kalman
Filter, the system state and measurement model are
defined in simple equations as follows.
1
2
In the equations, A is a transition matrix, H is a
measurement matrix to connect between state and measurement. The random variable and are the process and measurement noise respectively. They are
assumed to be independent each other and covariance is
Q and R, which have zero average and white Gaussian
probability distribution. When we track the ball using Kalman Filter in the soccer video, the position and velocity are defined in the state model and Kalman Filter performs the tracking by using two step algorithm, "Prediction" and "Correction".
The first step of the Typical Kalman Filter is
"Prediction". In the first step, we can get the predicted state and error covariance as follows.
3
4
The Second step is "Correction". In this step, The Typical Kalman Filter calculates the Kalman Gain using the previously predicted error covariance (5). Then the Kalman Filter corrects the state model by Kalman gain and measurement value that is the result of measurement in the sequence (6). Then Finally Kalman Filter corrects the error covariance using Kalman Gain (7) and turns over these values, corrected state and error covariance to the prediction step again.
5
6
– 7
Through this recursive algorithm, we can track a ball in the soccer video. The Block Diagram of the Typical Kalman Filter is presented in Figure 1.
Figure 1 Block Diagram of Typical Kalman Filter
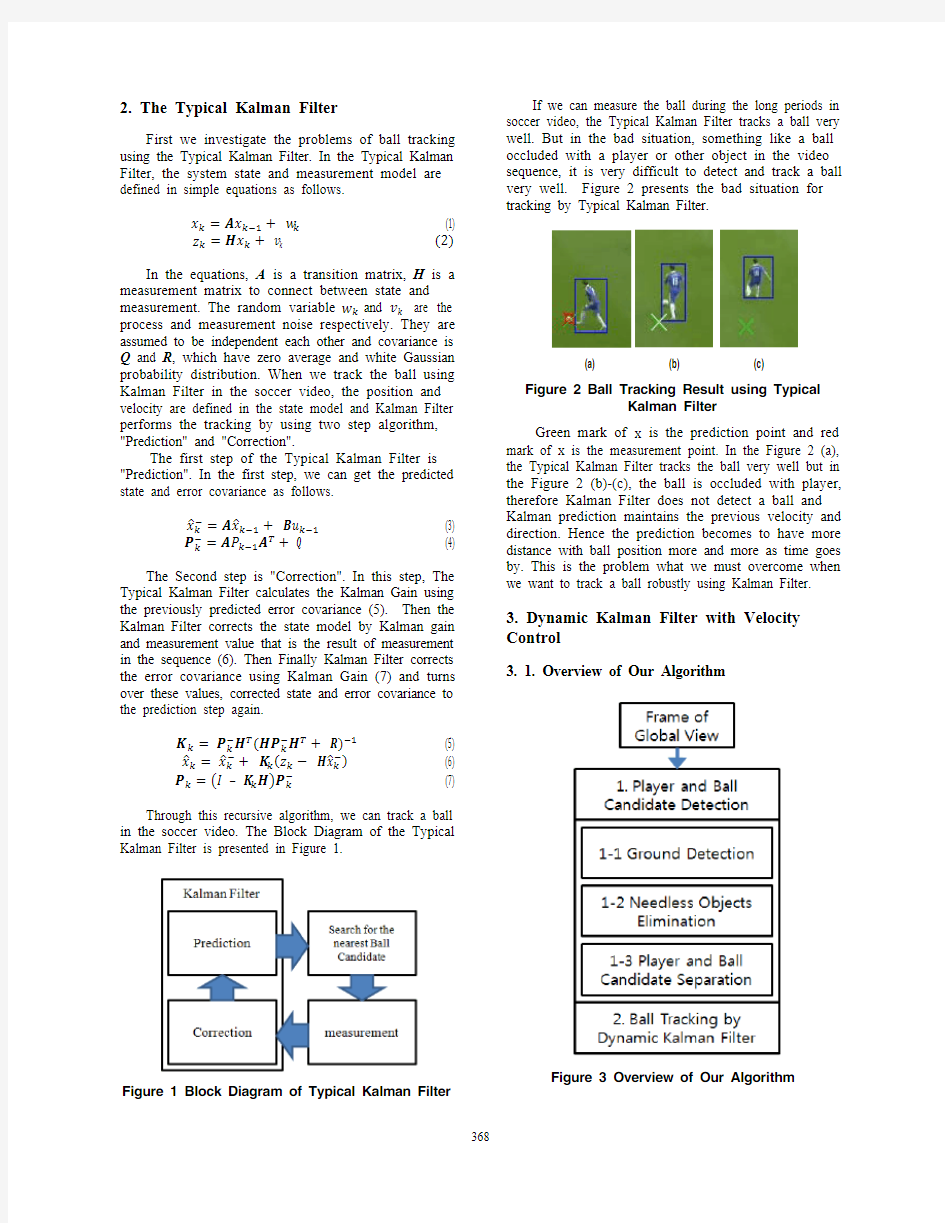
If we can measure the ball during the long periods in soccer video, the Typical Kalman Filter tracks a ball very well. But in the bad situation, something like a ball occluded with a player or other object in the video sequence, it is very difficult to detect and track a ball very well. Figure 2 presents the bad situation for tracking by Typical Kalman Filter.
(a) (b) (c)
Figure 2 Ball Tracking Result using Typical
Kalman Filter
Green mark of x is the prediction point and red mark of x is the measurement point. In the Figure 2 (a), the Typical Kalman Filter tracks the ball very well but in the Figure 2 (b)-(c), the ball is occluded with player, therefore Kalman Filter does not detect a ball and Kalman prediction maintains the previous velocity and direction. Hence the prediction becomes to have more distance with ball position more and more as time goes by. This is the problem what we must overcome when we want to track a ball robustly using Kalman Filter. 3. Dynamic Kalman Filter with Velocity Control
3. 1. Overview of Our Algorithm
Figure 3 Overview of Our Algorithm
Figure 3 presents the overview of our algorithm. We can classify view of the Soccer video by three types: global view, middle view and close-up view. The middle and close-up view are not appropriate to track a ball because these views only show the player, coach, spectator with closed-up shot, so the ball is not showed for a long time. Therefore we only track a ball in the global view because this shot shows a ball more long times and the global view makes up the majority of the sequence of the soccer video. Sometimes a ball is out of the soccer field in the global view but this case is very difficult to detect and track the ball, so we assume that we track the moving ball that is only in the ground. The entire object that we want to find (players and the ball) is in the ground, so first we detect the area of the ground in the full-frame .
3.2. Player and Ball Candidate Detection
3.2.1. Ground Detection
In the global view, the biggest part of the frame is ground area, so dominant color of the frame is the ground color. Many researchers detect the ground using the dominant color detection in the global view. [1]- [8], but it is very difficult to know what amount of range is the ground color. If we set the color range broadly, non-ground object will be detected as the ground, and on the contrary, if we set the small color range, the ground pixel that has a color out of range will not be detected as the ground. Hence this method is not robust. So instead of these method, we propose the new method to evaluate which pixel is ground or not. In the [5], they defined the ground color using feature of ground color pixel and HSV color space. They mentioned that ground color pixel has a G>R>B feature. G, R, B are the Green, Red, Blue in the RGB space respectively. Even if the entire ground pixel doesn't have the same color, the majority ground pixels has the same feature that is G>R>B . But this feature often appears in the gray-color pixels, the line, goalpost, socks of the player and they are recognized as the ground pixel. So we use the G>R>B feature and one more feature to detect the ground pixel. Our additional method is using edge information. Even though gray-color pixel has a G>R>B feature, they also have many edges. But ground pixels rarely have edge elements. So we use these mixed methods to detect the ground color as follows.
,
1 , , ,
, 0 ?
8
In the experiments, we used canny edge detection [15] to discriminate whether the pixel has an edge or not. Figure 4 shows the ground detection result using our method. Figure 4-(a) shows the result using only ground
color feature. This shows that ball is recognized as ground because a ball has a gray-color feature. Figure 4-(b) shows the result using only edge information and Figure 4-(c) shows the final result using the ground color and edge information. Then Figure 4-(d) shows the object discrimination result using the CCL (Connected Component Labeling).
(a)
(b)
(c)
(d)
Figure 4 (a) Color Detection (b) Edge Detection (c) Ground Detection Result (d) Labeling Result
3.2.2. Needless Objects Elimination
Because we only use the information of the player and ball to track the soccer ball, the seats (for the spectators), scoreboard, line and goalpost are the needless object to us. So these kinds of objects need to
be eliminated. We can eliminate these needless objects
that have a salient feature opposite from players and a ball. First the seats and scoreboard are much bigger than the player in the global view and their position is almost same in the consecutive frames. So we can easily eliminate these objects by using that information. But lines in the ground are difficult to eliminate. Although separated lines are easy to eliminate relatively, but it is very difficult for us to eliminate when the lines are occluded with the player and labeling one object. To overcome this problem, first we detect these occluded objects among the whole objects. These occluded objects have several salient features, first, the size of object is much bigger than the player, and second, the ratio of object pixel on the least square area pixel is low. Because these objects are composed by the player, line and large amount of ground pixels in the least square area. So if we use these salient features, we can separate these from the other objects. Now then what we thought is how to eliminate the line in these objects. The salient feature between the player and line is the density of the pixels. In the frame image, the line's shape is thin and long but on the contrary, player has thick, short shape and more density of pixel than line. So we first find the most density area in the object and eliminate the pixels except this area. In addition to this, if the player's uniform color is not gray-color, we can eliminate the line in the object by eliminating the pixels that have a G>R>B color feature. Figure 5 shows the result that we have eliminated the needless object using our proposed method.
Figure 5 Needless Objects Elimination Result
3.2.3. Player and Ball Candidate Separation
We can regard remained objects as the candidate of the player and the ball because the needless object was eliminated. Then we separate the player and ball candidates and use their information to track a ball.
In the global view, the player's height is longer than width because most of the player stands on the ground.
So we can define this feature as :
2. and are
width and height of the player respectively. Then also in the global view, we can define the average player size as : _ /16 _ _ /4. In this expression, _ and _ are height of the frame and player respectively.
In the global view, a ball has a feature that the ball's width and height are similar each other. So we can define
this feature as :
2
0.5. The official soccer
ball's diameter is about 9inch and when we assume that
average player height is about 71inch, we define this
feature as : _ /10 _ _ /5. In
this expression, player_h and ball_h are height of the
player and ball respectively.
Figure 6 shows the result of separation between the
player and ball candidates. Blue color square and red one
means the player and the ball candidates respectively.
Mostly the separation results are appropriate but we can
find the bad result in this figure that the referee’s leg is
classified as a ball candidate. But we can overcome these
kinds of errors in the tracking part of our algorithm.
Figure 6 Player and Ball Separation Result
3.3. Ball Tracking using Dynamic Kalman Filter
3.3.1. Motion Modeling
We will track a ball by using the results of the
separation and the Dynamic Kalman Filter. So first, we
need to make the model of the state and parameters in the
Kalman Filter as follows.
11
12
13
11
01
00
00
00
00
11
01
14
1000
0010
15
Where x k is the state model of the ball and ,
are x, y coordinates of the state. v x,v y are the velocity of
x, y-direction. The velocity is defined as the difference of
x, y coordinates between the current frame and previous
frame (12), (13). Accordingly, as the state is defined like
that, the transition matrix A and the measurement matrix
H are also defined as equation (14), (15).
3.3.2. Dynamic Kalman Filtering with Velocity
Control
With the motion modeling we have to design the
Dynamic Kalman Filter that is available to track a ball in
the dynamic conditions. Figure 7 and 8 shows our
proposed algorithm.
Figure 7 Block Diagram of Dynamic Kalman
Filter
In the Figure 7, the part shown in the dotted line is a difference with the Typical Kalman Filter in Figure 1. The Typical Kalman Filter tracks the target object using the Q (process noise covariance), R (measurement noise covariance) which are initialized as constant values and does not be changed until the tracking is over. It cannot track a ball properly in the dynamic condition, for example, a ball is occluded with players frequently. Therefore in this paper, we propose the Dynamic Kalman Filter that can track a ball in the dynamic condition by automatically changing the parameters. Figure 8 presents the three modes that are corresponded with three possible conditions in the soccer game.
Figure 8 Block Diagram of Dynamic Parameter
Setting
First, we have to set up the parameters Q, R, SA and Target according to the mode. In Figure 8, q and r are the diagonal element of matrix Q, R that is defined as process noise covariance and measurement noise covariance as below.
00
00
00
00
,
00
00
00
00
16
Matrix Q and R are important parameters to control the Kalman gain. In our proposed model, the Kalman gain is determined as the weight of position and velocity. At this time, if we define the weight of position is W and weight of velocity is W , they are concerned in Q, R as follows.
,
17
Hence we can do the dynamic tracking by controlling these parameters q, r with the mode appropriately. Next, we have to set up the parameter SA (Search Area). SA is classified as three kinds of mode - small, player, large. These respective modes can be represented by the distance from the target point – small = 20, large = 30 and especially the player = (DPLA/2) + 20 where the unit of calculation is pixel. DPLA means diagonal length of the player area. Lastly we have to set up the parameter Target. Target means the object that we have to track and that is classified as the ball and player mode.
Measurement Mode : this case means that we find the ball in the SA. At this time, we can trust the measurement value so we can set up the parameter r = 0 in order to apply the measurement entirely. Then we set up the q = 0. Then the Target mode is the ball because the ball is measured in this case.
Player Occlusion Mode : if we does not find a ball but the player is detected in the SA, we can assume that a ball is occluded with the player. In this mode, even if we do not find the ball, we can trust that the ball exists in the player area. So we can set up the parameter q = 1, r = 0 in order to reflect the measurement entirely. Instead, the Target is not a ball but the player and we have made the Kalman Filter to track the player until we find a ball around the player area.
Prediction Mode : if we do not find a ball and also the player does not be detected in the SA, we can assume that we cannot find a ball temporarily due to the noise of the frame. Hence in this case we cannot trust the measurement. so we can set up the parameter as q = 0, r = ∞ in order that the Kalman Filter tracks a ball using only the prediction value. Instead, SA is large because the measurement error is big and then in order that the Kalman Filter searches a ball in the large area.
Velocity Control : when we track a ball using the Kalman Filter, we need to control the velocity of the state vector before a ball is occluded with the player. When a ball is in the situation of Figure 9, if the ball does not pass through the player, we know that the player catches the ball during the several frames. So if we do not reduce the velocity of the state vector before the occlusion, the prediction is not stopped well like a Figure 9 because the prediction is affected from the velocity of
the state. This causes the negative results such that
Kalman prediction has a big error and missing the Target at in the worst case.
Figure 9 Velocity Control Problem To solve this problem, we need to control the velocity of the state. The Target is already changed in the Player Occlusion Mode and in the Prediction Mode, the Kalman Filter does not refer to the velocity of state, these modes are not related with the velocity control. Therefore we control the velocity of prediction in the Measurement Mode. In this mode, if we expect that the prediction point will be beyond the player area like a Figure 9, we can control the velocity of state vector by revising Prediction point like a Figure 10.
Figure 10 Velocity Control
means Predicted Position of the Ball, is Current Position of a ball and is Center Point of the Player. As we have previously mentioned, if we expect that the prediction point will be beyond the player area, we change the to by reducing the Velocity of the state. If we present that the is ( , ) and the is ( , ), we can denote according to the Kalman Filter expression. Thus , can be presented like a previous Figure 10 and also we can control the Velocity value using Velocity Control parameter ‘ ’ as below.
, , ,
,
(18)
19
4. Experimental Results
We have implemented the experimental environment using OpenCV ver1.0 [15]. Then we used the 592x320 soccer video that is the game from the 08-
09 English Premier League Round 8 Chelsea vs Middlesbrough and we used the consecutive 1000 frames
of global view in this video. We tested our algorithm with the two kinds of methods (Typical and Adaptive Kalman Filter) to compare and demonstrate the superiority of our algorithm. Especially we used the Weng’s method as Adaptive Kalman Filter algorithm [14]. This algorithm robustly tracks the target object in the situation when the target object is occluded with the other one in the video sequence. We used this algorithm and applied this to track a ball in the soccer video to compare with our algorithm. Figure 11 shows the result.
(a)
(b)
(c)
(d)
Figure 11 (a) Trajectory of Real Ball (b) Typical Kalman Filter (c) Adaptive Kalman Filter (d)
Dynamic Kalman Filter
In this Figure, the horizontal axis means the frame number and the vertical axis means the distance of measurement position from the origin. (a) shows the result of real ball position in the video sequence and (b), (c) and (d) show the tracking result using Typical, Adaptive and proposed Dynamic Kalman Filter. When we see the result of (b), Typical Kalman Filter does not track the ball well in the whole sequence because when a ball is occluded with the player, Kalman prediction has a big error and these errors are accumulated continuously.
(c) shows the better result than (b) because the Adaptive Kalman Filter tracks the ball robustly when a ball is occluded and passed through the player. But when a ball is occluded and the player possesses it during the several frames, Kalman prediction predicts the wrong position and big error can be occurred. However our proposed Dynamic Kalman Filter (d) shows good tracking result in the almost whole sequence and especially it overcomes the occlusion problem well. A little error was produced during the frame 720-800, because in this sequence, the players crowded in the middle of ground and when the Kalman Filter tracks a ball and chooses the wrong player as the target in the Player Occlusion Mode. But the proposed Dynamic Kalman Filter shows the robust tracking results in the almost whole sequence except these short frames. Figure12 shows the errors between the real ball position and the tracking results that we use the each Kalman Filter method.
(a)
(b)
(c)
Figure 12 (a) Difference of RB-TK (b) RB-AK (c)
RB-DK
In the Figure 12, RB means Real Ball and TK, AK, DK means Typical, Adaptive, Dynamic Kalman filter respectively and the results show that the proposed Dynamic Kalman Filter is the best robust ball tracking algorithm among them in our experiment. Table 1 shows the average of errors and processing time. In this table, performance time of the proposed Dynamic Kalman Filter is larger than others about 2.1% because of complexity of the algorithm. But an error is much smaller than others about 85%, 75% to compare with TK and AK respectively. So we can know DK is the best among them.
Algorithm Average of Error
(pixel)
Average of
Processing Time
(msec/frame)
TK 142.82 166.72
AK 83.95 166.89 DK 20.73 170.62 Table 1 Average of Error and Performance Time In the soccer video, if the prediction is close to real
ball position, we can tell that the prediction is correct and Kalman Filter has well prediction in this frame. Hence
we can assume that if the difference between the prediction and real ball position is smaller than threshold,
this means that the Kalman Filter has correct prediction
and detects a ball in this frame correctly. Table 2 shows
the accuracy of the algorithms. First rows of the table
show the threshold values. The results show that DK has
a high accuracy more than 81% when the threshold is
30pixel and it is 10pixel, DK is also more than 66 % accuracy. Table 2 also shows that DK’s accuracy is higher than TK and AK 83%, 38% respectively. Hence
we can say that our proposed DK algorithm tracks a ball robustly in the soccer video.
Algorithm Threshold(pixel)
10 20 30
TK 35.6% 41.5% 44.7% AK 48.4% 60.3% 66.0% DK 66.8% 78.5% 81.7% Table 2 Accuracy of Algorithms Conclusions
In this paper, we propose the new Dynamic Kalman Filter model to track the ball robustly by overcoming the player-ball occlusion problem in the soccer video sequence. First we classified three kinds of modes and
we have made Dynamic Kalman Filter that could set up
the parameters adaptively to accurately track a ball by conditions. We also have made the Dynamic Kalman Filter that could control the weighting value of the velocity to overcome the prediction error problem and to reduce the prediction error in the situation of player-ball occlusion. The results present that the Dynamic Kalman Filter robustly tracks a ball in the long sequence of frame better than the Typical Kalman Filter and Adaptive Kalman Filter. But as we previously mentioned, when
we meet the situation that the players are crowded in the ground, the proposed Dynamic Kalman Filter shows the negative result. Hence our future work is solving this problem to increase the accuracy of tracking a ball in the soccer video sequence.
Acknowledgements
This work was supported by the ITRC (Information Technology Research Center, MIC) and Seoul R&BD program, Korea.
References
[1] J. Liu, X. F. Tong, et al. Automatic Player detection,
labeling and tracking in broadcast soccer video. In
BMVC 2007.
[2] A. Ekin, A.M. Tekalp, and R. Mehrotra. Automatic
Soccer Video Analysis and Summarization, IEEE Trans.
on Image Processing, Vol. 12:7(2003), 796--807.
[3] V. Pallavi, J. Mukherjee, A.K. Majumdar and S. Sural,
Graph-based multiplayer detection and tracking in
broadcast soccer videos, IEEE Transactions on
Multimedia 10 (5) (2008).
[4] P. Figueroa, N. Leite, R. Barros, I. Cohen, and G.
Medioni. Tracking soccer players using the graph
representation. In ICPR, pages 787–790, 2004. [5] K. Seo, J. Ko, I. Ahn, and C. Kim, "An intelligent
display scheme of soccer video on mobile devices,"
IEEE Trans. Circuits Syst. Video Technol., vol. 17, no.
10, pp. 1395-1401, Oct. 2007
[6] T. D'Orazio , N. Ancona , G. Cicirelli , M. Nitti, A Ball
Detection Algorithm for Real Soccer Image Sequences,
Proceedings of the 16 th International Conference on
Pattern Recognition (ICPR'02) Volume 1, p.10210,
August 11-15, 2002
[7] Xiao-Feng Tong , Han-Qing Lu , Qing-Shan Liu, An
Effective and Fast Soccer Ball Detection and Tracking
Method, Proceedings of the Pattern Recognition, 17th
International Conference on (ICPR'04) Volume 4, p.795-
798, August 23-26, 2004
[8] D. Liang, Y. Liu, Q. Huang, and W. Gao, "A scheme for
ball detection and tracking in broadcast soccer video," in
Proc. Pacific-Rim Conf. Multimedia, 2005, pp. 864--875.
[9] X. Yu, H. W. Leong, C. Xu, and Q. Tian. Trajectory-
based ball detection and tracking of broadcast soccer
video, IEEE Transactions onMultimedia, vol 8, Issue 6,
pp: 1164-1178, December, 2006.
[10] X. Yu, C. Xu, Q. Tian, and H. W. Leong, “A Ball
Tracking Framework for Broadcast Soccer Video”,
ICME, Baltimore, US, July 6-9, 2003
[11] X. Yu, Q. Tian, and K. W. Wan. A novel ball detection
framework for real soccer video, In Proc. ICME 2003,
Vol II, 265--268.
[12] G.Welch and G. Bishop. An introduction to the kalman
filter. Technical Report 95-041, University of North
Carolina, Department of Computer Science, 1995. [13] Yi Zhang, Huosheng Hu, and Huiyu Zhou. Study on
Adaptive Kalman Filtering Algorithms in Human Movement Tracking. In Int. Conf. on Information
Acquisition. IEEE, 2005.
[14] Weng, S. K., Kuo, C. M., Tu, S. K., Video object
tracking using adaptive Kalman filter, Journal of Visual
Communication and Image Representation, Vol. 17, No.
6, 2006, pp. 1190-1208.
[15] “OpenCV library,” https://www.360docs.net/doc/606907116.html,/projects/open
cvlibrary.
portal开发入门手册范本
门户开发入门手册
版本历史
目录 1.1创建P ORTAL域 (4) 1.1.1 启动 Configuration Wizard (4) 1.1.2 创建或扩展域 (4) 1.1.3 选择域源 (5) 1.1.4 配置管理员用户名和密码 (6) 1.1.5 指定服务器启动模式和 JDK (7) 1.1.6 自定义环境和服务设置 (9) 1.1.7 创建 WebLogic 域 (9) 1.1.8 创建域 (10) 1.2创建P ORTAL EAR项目 (11) 1.3创建P ORTAL W EB 项目 (16) 1.4创建数据同步项目 (20) 1.5创建P RTAL (23) 1.5.1 创建一个Portal (23) 1.5.2 增加一个页面到你的Portal (25) 1.5.3 发布和查看Portal (27) 1.5.4 创建Portlets (27) 1.5.5 把Portlets添加到Portal (31) 1.6登录管理控制台并创建P ORTAL和桌面 (32) 1.6.1 打开管理控制台 (32) 1.6.2 登录管理控制台 (33) 1.6.3 创建Portal和桌面 (34)
1创建Portal域 ●启动 Configuration Wizard ●创建或扩展域 ●选择域源 ●配置管理员用户名和密码 ●指定服务器启动模式和 JDK ●自定义环境和服务设置 ●创建 WebLogic 域 ●创建域 1.1启动 Configuration Wizard 打开“开始”->“BEA Products”->“Tools”->“Configuration Wizard”。之后将会出现“欢迎”窗口。 1.2创建或扩展域 提示您选择是新建域还是扩展现有域。
前台新进员工带教手册(V11)
前台新进员工带教手册 目录 一、海友酒店介绍 1.1品牌故事 1.2产品特征 1.3目标客户群 二、海友酒店前台交接班制度 2.1 交接班准备 2.2 交接事项 2.3 填写交接班本 2.4 接班事项 2.5 交接班签名 三、海友酒店前台员工带教计划 3.1 带教目的 3.2 带教内容 一、海友酒店介绍: 1.1品牌故事 海友酒店是华住酒店集团(原汉庭酒店集团)旗下的风格经济型酒店连锁品牌,致力于为有预算要求 的客人提供“欢乐、超值”的住宿产品。 我们全情投入,与顾客真诚沟通,分享快乐,为客人提供愉快、舒适的住宿体验。一切从我们的“HI”开始。。。。。。 2005年初,华住在中国正式创立,同年8月,第1家门店开业,2006年底,旗下的汉庭酒店第34 家开业。2007年7月,华住以股权融资8500万美元创下中国服务行业首轮融资的新纪录,2007年底,汉庭酒店第74家开业。2008年初,汉庭在全国签约门店数达到180家,完成了全国主要城市的布局,并重 点在长三角、环渤海湾、珠三角和中西部发达城市形成了密布的酒店网络,成为国内成长最快的连锁酒店品牌之一。2008年4月,汉庭已开业酒店超过100家,出租率、经营业绩各项指标均在业内处于领先地位。 2008年2月,华住酒店集团正式成立,是国内第一家多品牌的酒店集团。华住致力于实现“中国服务”的理想,即打造世界级的中国服务品牌。华住的愿景是“成为世界住宿业领先品牌集团”,为此,我们将不断追求精细化的管理,实施标准化的体系和流程,更全面、更迅速地推进集团化发展。华住酒店集团旗下目前拥有禧玥酒店、星程酒店、汉庭酒店、全季酒店、海友酒店五个系列品牌,我们将坚持时尚现代、便捷舒适、高性价比的优势特点,塑造中国酒店的典范。
基于 Crystal Ball 软件对测量不确定度的评定
基于Crystal Ball 软件对测量不确定度的评定 1240410114 王颖测量结果与被测量真值的一致程度被定义为准确性。但是实际上不存在完全准确无误的测量,因此通常在给出量值结果的同时通常给出适应于实际需要的不确定度。如果没有对不确定度的表述,所进行的测量的被测量对象的质量就无从判断,从而导致测量的结果值不具备充分的实用价值。测量的结果值的准确,是在一定的不确定度、误差允许误差范围内的准确。 一)基本概念 测量不确定度的概念最早是有国外引入,一般译为:与测量结果相联系的参数,用来表示赋予被测量对象值的分散性的特征。它最早跟我们熟悉的误差的概念相似。测量不确定度的前提是当我们在重复性条件下,对具有稳定特征的被测量对象X独立的进行了n次重复测量实验,在这一系列测量实验过程中,通过n个结果按公式计算出的,第i次结果xi的实验标准差E(xi),xi虽然是指第i 次测量的结果,但是它的实际含义是:任一次的测量结果。表明不确定度s(xi)=u(xi)是这个测量序列中任意一次测量结果的不确定度。如果在相同的相同的、重复条件下再进行测量,得到的结果xi 的标准不确定度仍然是E(xi。 二)测量不确定度评定的步骤
1.识别不确定度来源。对测试结果测量不确定度来源的识别应该首先从分析测量过程开始,并且要对测量方法、测量系统和测量程序作详细研究和熟悉,如果可能要画出测量系统原理图和测量流程图。不确定度来源一般有:对被测量的定义不完善;实现被测量的定义的方法不理想;选取测量样品的典型性不够;对测量过程中受外部环境影响的因素识别不完整等因素引起。 2.建立模型。当被测量对象Y(即我们期望的输出量)由N个其他因素X1,X2,…,XN(即输入量),通过函数关系f来确定时,则Y = f (X1 , X 2 ,L, X N )称为测量模型或数学模型。式中大写字母表示测量的符号f 为测量函数。如果输入量Xi 的估计值为Xi,被测量对象Y 的估计值为y,则测量模型可建立为:y = f (x1 , x 2 ,L, xN ) 3.标准不确定度A类和B类分量的计算。A类不确定度分量的评估(对观测序列所进行统计分析作出的评估)。a)对输入量Xi进行独立的n 次测量,测量结果为:x1、x2……xn, 单次测量结果的标准差为:估计值的标准不确定 度为:,由于B 类的使用条件与A类不同,因此B 类不确定度分量的评估与A类也不同,B类评估时,输入量的估计量Xi不是由重复观测得到时,其标准偏差可用对Xi的信息来进行评估。B类评估的信息来源可来自:仪器设备的校准证书的说明、生产厂商标示的说明书、使用的检测依据的标准、引用手册的参考数据、以前
Laravel 5.5 入门教程6
Laravel 5.5 入门教程 By IT崖柏图 Mail 973714522@https://www.360docs.net/doc/606907116.html, 出自布尔教育PHP高端教育培训 21 章功能细化 21.1 登陆状态 在 view 层 , 判断用户是否登陆 或者我们还可以使用身份快捷认证,如: 21.2 分页功能 中使用 paginate 方法。 代码如下:
如何渲染样式在Blade模板上? 附加参数到分页链接中 方法: ```php {{ $users->fragment('foo')->links() }} 然而,自定义分页视图最简单的方法是通过vendor:publish命令将它们导出到你的resources/views/vendor php artisan vendor:publish --tag=laravel-pagination 这个命令将视图放置在 resources/views/vendor/pagination 目录中。这个目录下的 default.blade.php 文件对应于默认分页视图。你可以简单地编辑这个文件来修改分页的 HTML 。 21.3 JS 验证 以发布借款项目为例 , 做 JS 验证
第22章自动验证自动验证 22.1 验证案例 第1个参数为Request对象,第2个参数为验证规则验证规则 验证规则为关联数组,语法如下: 借款验证案例: 验证未通过的检测,以money为例 22.2 自定义错误信息 如果验证未通过,需要自定义错误信息,只需在第3个参数中传递.
模板中使用 22.3 手动验证 ,也可以手动来创建一个验证对象 22.3 表单授权验证 令来创建表单请求类:
CrystalBall实验操作过程
Crystal Ball实验操作过程 实验一: 一、数据录入与导入 双击CB快捷方式图标或直接打开Excel打开软件。前面提到过Crystal Ball软件是在Excel里的一个插件,所以双击打开后是Excel的界面,如下图: 图 1 用户可以在该界面中直接录入数据,也可以左击右上角的符号,选择打开,将原有Excel表格中的数据直接导入到带有Crystal Ball插件的电子表格中。 二、拟合分布 图2 (1)对数据进行标准化处理(减少原数据相互间的距离对拟合分布的影响) 通过Average计算每个分布工程样本数据的均值,然后各个样本数据除以相
应的均值,对数据进行标准化处理。 (2)拟合分布 选取表格区域,点击工具栏上“Run-Tools-Batch Fit”,如图3所示。 图3 在操作对话框中,选择“next”,至图4对话框对相应命令进行选择,可得到拟合过程的相关数据。 图4 注:对于卡方检验,水晶球软件计算p值,p值大于0.5一般表示紧密拟合; 对于科尔莫格洛夫-斯米尔诺夫检验,一般地,小于0.03的K-S值表明良好拟合; 对于安德森-达林检验,小于1.5的计算值一般表明拟合优良。 实验二:
一.按照实验一的操作,先将数据在Crystal Ball软件打开. 二、假设单元格概率分布的定义及相关操作 输入数据后,进行随机变量假设单元格概率分布的定义。这里假设使用悲观时间的单元格来进行概率分布的定义。(注:对于假设单元格的选择,并无太多的限制,因为定义各种概率的分布,是由相应的参数确定的,因此选择的假设单元格不同对结果并没有影响。)有一点需要注意的是,选择假设单元格时,该单元格应当是一确定的数字,而不能是公式. 选定单元格(如单元格I2)后,点击工具栏上的,随即弹出图5,CB 软件中提供22种不同的分布可供选择,根据实验任务书的要求,第一和第二项分部分项工程服从三参数beta分布,因此,选择BtaPERT分布,并填入相应参数,即可完成对“基坑支护挖土方”的定义,如图6所示。同理可完成其它分布的定义。 图5 图6 由于第3~8项同为三角分布,因此当完成第3项的定以后,选定I4单元格
crystalball软件介绍
Crystal Ball 介绍 Crystal Ball(CB)是基于PC Windows平台而开发的简单且非常实用的风险分析和评估软件。面向各类商务、科学和技术工程领域,用户界面友好,是基于图表进行预测和风险分析。CB 在微软Excel 应用软件上运行,使用蒙特卡罗(Monte Carlo)模拟法对某个特定状况预测所有可能的结果,运用图表对分析进行总结,并显示每一个结果的概率。除了描述统计量、趋势图和相关变量分配,CB还进行敏感性分析,让用户决定真正导致结果的因素。如今 CB 已是全世界商业风险分析和决策评估软件中的佼佼者。Crystal Ball专业版是市面上以Excel为本的风险分析及预测工具中最全面的套装软件。其功能和特点不仅早已得到广大用户的认同,并获得许多正在考虑购买相关软件产品新用户的青睐和首选。85%<<财富>>评出的全球500强大企业中早已有400家使用 Crystal Ball 软件作为他们进行商务决策,项目投资风险分析的工具。再者,美国前50名最佳MBA 商学院,已有40所也用Crystal Ball作为教研和商业性课题的工具。用户之一世界着名的哈佛大学商学院把 Crystal Ball 列为可用于计划金融的软件 (Project Finance Software)。因为财政计划,金融投资方面的风险分析是CB 软件功能的一部分。 Crystal Ball之前是美国Decisioneering公司的产品,Decisioneering在2007年被Hyperion公司收购,Hyperion 公司之后又被Oracle收购,所以Crystal Ball目前的发行商是Oracle。 Crystal Ball的用途: DFSS,过程研究,过程优化,现有过程的模拟改变,公差分析,设计分析,原料筛选,容量设计,资源分配与存货优化,约束后的项目筛选,预防性维护优化,成本预算,可靠性分析,排队过程分析,建筑项目资金预算的偶然性分析,商业过程模拟,工程设计与预测,供求预测,制造供应链问题的减少与存货控制,新产品商品化的资金模型。 模拟的意义 当我们使用模拟这个字时,代表我们利用分析模型来仿真现实生活的系统。过去仿真软件过于偏重复杂数学造成操作困难。Crystal Ball工作表风险分析结合工作表呈现方式与自动分析模拟,可以清楚的展现因为变量变异造成模型产出的各种情况。如果没有增加仿真功能,那工作表充其量只是揭示单一结果与最一般化的情境。工作表模拟最常用的方法就是蒙特卡洛法,它可随机产生变量在不同情况下的模型结果。 蒙特卡洛模拟 蒙特卡洛模拟一开始主要运作于分析赌博游戏。诸如轮盘、骰子、拉吧等。蒙特卡洛可以模拟这些赌博中的随机行为。当你掷骰子时,你知道共有一至六的数字可能会出现,但是你不知道一个规则。他就像企业主面对问题时,可能知道问题引发的结果与过程,却无法了解每一个变量的严重程度。(例如:利率、员工、股价、存货及来电率) 自行于工作表内选定变量的分配类型 针对每个不确定变数,你可以自行设定相关机率分配。您可以依据该变量所处的环境选择分配的类型,分配类型如下: 您可以将工具栏加入EXCEL工作表中,当然您必须知道这些等式所代表的分配。透过Crystal Ball, 软件可自动为用户计算方程式。Crystal Ball甚至可以藉由过去的历史数据来修正分配。
微信小程序开发(PHP Laravel MySQL)教学大纲
《微信小程序》教学大纲 课程编码制订人制订日期修订人修订日期审核人审核日期曾建华2021.1 学分:3-4 学时:48-64 适用专业:软件技术专业 一、课程的性质与任务 课程的性质:针对计算机软件类相关专业学生的专业核心课。 课程的任务:通过本课程的学习,学生应能熟练使用微信开发者工具,熟练开发微信小程序,在后台方面,理解后台的开发流程以及微信小程序是如何与后台交互的。 二、教学基本要求 通过本课程的学习,学生应达到下列基本要求: 微信小程序的项目构成 微信小程序页面构成 生命周期函数 WXML 事件 微信小程序如何使用外部API(到此48学时) 使用PHP+MySQL设计自己的API 使用Laravel框架设计自己的API(到此56学时) 系统组件 自定义组件 WeUI组件库(到此64学时) 三、教学条件 机房上课,每个学生有一台电脑。 投影仪等多媒体教学设备。
安装软件:微信开发者工具、HBuilder、xampp。 四、教学内容 各学校可根据实际情况选择: 1-7:48学时 1-9:56学时 1-11:64学时 序号单元主要内容 1 开发环境及第一 个微信小程序 ●了解微信小程序相关技术。 ●掌握微信开发者工具的安装、使用。 ●掌握如何创建微信小程序。 ●掌握微信小程序的项目架构、页面结构。 2 基本页面和底部 导航 ●熟练掌握创建新的页面。 ●熟练编写底部导航代码。 ●理解底部导航各属性的含义。 ●进一步熟悉微信开发者工具界面。 3 js文件●理解app.js中的生命周期函数。 ●掌握app.js中的全局变量。 ●理解page.js中的生命周期函数。 ●掌握page.js中的局部变量。 ●掌握如何创建和引用模块。 4 WXML语法●掌握数据绑定的方法。 ●掌握条件渲染的用法。 ●掌握列表渲染的用法。 ●掌握如何定义模板以及使用import引用模板。 ●掌握include引用方式。 5 事件及数据传递●熟练掌握如何进行事件处理。 ●理解事件冒泡机制。 ●在事件中获取组件绑定的附加信息。 ●熟练掌握路由机制。 ●熟练掌握页面之间如何进行数据传递。 6 常用API及组 件 ●清楚小程序API的类型,熟悉界面交互API。 ●了解地图操作步骤。
新员工带教流程
新员工带教流程 第一天: 熟悉公司的作息时间,了解公司基本状况,基本服务礼仪与动作规范,学习做迎宾。 1、上班时间:10:00---19:30 12:00----21:00 (转正前) 10:00--16:00 14:30---21:00(转正后) 备注:时间根据季节调整。 2、管理手册:P1、江明商贸简介(了解即可,店长须以解说的方式进行); 3、服务礼仪:1)仪容仪表标准; 2)服务动作规范(站姿、蹲姿、距离、手势、角度); 3)学习做迎宾(声音、表情、语调、迎宾位置); 4)电话礼仪; 第二天: 了解公司的考勤制度,产品的风格分类及陈列 1、相关制度的了解:《考勤制度及请假报批程序》《离职程序》; 2、产品风格分类(①以鞋来区分:男鞋、女鞋、童鞋②以季节来区分:春秋单鞋、夏季凉鞋、冬靴③以鞋头区分:尖头、圆头、方头④以鞋跟来区分:平跟3CM以下、中跟3.1CM--5CM、高跟5.1CM---8CM、特高跟8.1CM 以上⑤以鞋帮来区分:凉(拖)鞋、中空鞋、浅口鞋、满帮(低腰)鞋、短靴(筒高14CM以下)、中靴(筒高15--22CM)、长靴(筒高23--36CM);(以店铺现有货品实物讲解方式进行带教) 3、了解什么是陈列,为什么做陈列、陈列标准及陈列原则。 第三天: 掌握《会员卡》的办理及使用规范,相关票据的填写及操作流程,鞋类产品从哪六个方面进行描述。 1、“会员卡”的申办标准及使用细则; 2、相关票据:《销售单、销售退货单》《调拨单》《会员单》正确填写; 3、鞋类产品从:楦型、皮料、底材、高度、风格、线条六方面描述(以实物操作讲解带教为标准); 4、服务1--2步:细节重点的掌握及实操应用。 第四天: 了解鞋类基本皮料、材质的特性及打理保养方法,所属品牌货号含义,FABE\法则应用,服务三、 四步,轮流做迎宾。 1、皮料特征及打理方法、皮料的分类(牛、羊、猪、打蜡、漆皮、磨砂皮);(以店铺现有货品实物讲解方式进行带教) 2、了解所属品牌货号的含义; 3、服务技巧之FABE、含义理解及应用; 4、服务三、四步的细节重点的掌握及实操应用。 第五天: 学习掌握公司销售技巧及服务规范流程和语言表达标准、掌握做报表及相关单据技能,初步了解库存及货品摆放位置,服务五、六步、协助做销售。 1、销售技巧:USP/AIDA的含义及实操应用(以场景模拟带教实操为主) AIDA A:注意(Attention) 1)商品陈列 2)导购员的仪容、仪表 3)精神奕奕热忱的招呼(三声) 4)卖场气氛 I:兴趣(Interest) 1)接近顾客了解顾客购物动机 2)让顾客触摸商品 3)有效介绍货品的特性及卖点 4)为顾客做参谋 5)邀请试穿 D:欲望(Desire) 1)介绍FAB及USB 2)强调物超所值不可代替 3)化解顾客疑虑及异议 A:行动(Action) 1)把握时机完成交易 2)介绍打理知识 3)介绍其他配成产品 4)付款过程快速 USP(Unique selling piont)独特销售点: 质料、设计款式、手工、处理方法、色彩、价钱 2、开放式与封闭式的语言技巧:产品推荐:O O C 促成销售: C O C 3、初步了解库存及货品的摆放位置、辅助老员工做销售 4、掌握报表的正确填写、各项单据的电脑操作
风险管理软件crystalball使用指导
Monte-Carlo Simulation with Crystal Ball? To run a simulation using Crystal Ball?: 1. Setup Spreadsheet Build a spreadsheet that will calculate the performance measure ., profit) in terms of the inputs (random or not). For random inputs, just enter any number. 2. Define Assumptions—., random variables Define which cells are random, and what distribution they should follow. 3. Define Forecast—., output or performance measure Define which cell(s) you are interested in forecasting (typically the performance measure, ., profit). 4. Choose Number of Trials Select the number of trials. If you would later like to generate
the Sensitivity Analysis chart, choose “Sensitivity Analysis” under Options in Run Preferences. 5. Run Simulation Run the simulation. If you would like to change parameters and re-run the simulation, you should “reset” the simulation (click on the “Reset Simulation” button on the toolbar or in the Run menu) first. 6. View Results The forecast window showing the results of the simulation appears automatically after (or during) the simulation. Many different results are available (frequency chart, cumulative chart, statistics, percentiles, sensitivity analysis, and trend chart). The results can be copied into the worksheet. Crystal Ball Toolbar: Define Define Run Start Reset Forecast Trend
《PHP网站开发实例教程(第2版)》—教学大纲
《PHP网站开发实例教程(第2版)》 教学大纲 (课程英文名称) 课程编号: 学分:5学分 学时:70学时(其中:讲课52学时上机18学时) 先修课程:计算机基础 适用专业:信息技术及其计算机相关专业 开课部门:计算机相关院系 一、课程的性质与目标 《PHP网站开发实例教程(第2版)》是面向计算机相关专业的一门PHP课程,涉及框架基础知识、数据库和模板引擎的使用、框架实现原理、使用框架开发项目等内容。通过本课程的学习,学生能够了解框架的基础使用,如何使用框架进行网站开发,以及市面上流行的Laravel框架的使用。 二、课程设计理念与思路 课程设计理念:高等职业教育的集中实践教学环节需明确必要的理论知识的升华与知识层面的拓展,不能局限于单纯的技能训练。单纯的技能训练不是提高高等职业教育的理想课程。以能力的培养为重点,以就业为导向,培养学生具备职业岗位所需的职业能力,职业生涯发展所需的能力和终身学习的能力,实现一站式教学理念。 课程设计思路:基于工作过程开发课程内容,以行动为导向进行教学内容设计,以学生为主体,以案例(项目)实训为手段,设计出理论学习与技能掌握相融合的课程内容体系。教学整体设计“以职业技能培养为目标,以案例(项目)任务实现为载体、理论学习与实际操作相结合”。
三、教学条件要求 操作系统:Windows 7、W AMP 开发工具:命令行工具(如cmd)、开发工具(如VS Code)、依赖管理工具(如Composer) 四、课程的主要内容及基本要求 第1章开发环境搭建 第2章PHP框架基础(上) 第3章PHP框架基础(下)
第4章数据库和模板引擎 第5章内容管理系统(上)
前台新进员工带教手册
一、海友酒店介绍 1.1 品牌故事 1.2 产品特征 1.3目标客户群 二、海友酒店前台交接班制度 交接班准备 交接事项 填写交接班本 接班事项 交接班签名 海友酒店前台员工带教计划带教目的 带教内容 海友酒店介绍:前台新进员工带教手册 目录
1.1 品牌故事 海友酒店是华住酒店集团(原汉庭酒店集团)旗下的风格经济型酒店连锁品牌,致力于为有预算要求的客人提供“欢乐、超值”的住宿产品。 我们全情投入,与顾客真诚沟通,分享快乐,为客人提供愉快、舒适的住宿体验。一切从我们的“HI”开始。。。。。。 2005 年初,华住在中国正式创立,同年8 月,第1 家门店开业,2006 年底,旗下的汉庭酒店第34 家开业。2007 年7 月,华住以股权融资8500 万美元创下中国服务行业首轮融资的新纪录,2007 年底,汉庭酒店第74 家开业。2008 年初,汉庭在全国签约门店数达到180 家,完成了全国主要城市的布局,并重点在长三角、环渤海湾、珠三角和中西部发达城市形成了密布的酒店网络,成为国内成长最快的连锁酒店品牌之一。2008 年4 月,汉庭已 开业酒店超过100 家,出租率、经营业绩各项指标均在业内处于领先地位。 2008 年2 月,华住酒店集团正式成立,是国内第一家多品牌的酒店集团。华住致力于实现“中国服务”的理想,即打造世界级的中国服务品牌。华住的愿景是“成为世界住宿业领先品牌集团”,为此,我们将不断追求精细化的管理,实施标准化的体系和流程,更全面、更迅速地推进集团化发展。华住酒店集团旗下目前拥有禧玥酒店、 星程酒店、汉庭酒店、全季酒店、海友酒店五个系列品牌,我们将坚持时尚现代、便捷舒适、高性价比的优势特点,塑造中国酒店的典范。 1.2 产品特征 装饰风格简约时尚 公共区域提供免费网吧 全酒店无线覆盖 独立淋浴、写字桌、电视机 提供大毛巾 自助理念 1.3 目标客户群 有预算要求的商务客人、家庭型散客、青年群体、长住客、背包客二、海友酒店前台交接班制度:交班前准备整理前台物品; 检查必备品和表格;
Crystal软件说明
软件介绍 CrystalMaker:晶体和分子结构可视化软件 探索晶体世界 从金属到沸石,苯到蛋白质, CrystalMaker是了解晶体和分子结构的最简单方法。 什么是CrystalMaker? CrystalMaker软件是一款在创建、显示和操作各种晶体分子结构中屡获好评的软件。CrystalMaker在生产力方面提供了一个流线型的工作流程,您只需把您的数据文件拖拉到程序中便可即时显示照片般逼真的色彩。用鼠标就可以实时操作晶体结构。多视角"bookmarks"和撤销次数鼓励您探索和发现——理想的教学和科研软件。 快速创建晶体和分子结构! 使用CrystalMaker软件,您可以轻松快速创建任何晶体或分子结构。内置的对称处理和美观的空间群浏览器可得到晶体的日志,并且该程序会自动生成所有的键和多面体。CrystalMaker 提供了广泛的模式类型,包括传统的“ball-and-stick”, space-filling, polyhedral, wireframe 以及thermal ellipsoids模式。使用photo-realistic simpler和line-art display选项,每种模式类型都可以被广泛地定制。 综合数据的输入和输出 负载来自于超过15+ 格式的结构数据,包括Cambridge Structures Database, Protein Data Bank, CIF, GSAS, SHELX等。您可以操作几乎无限的原子数量。使用独特的"Depth Profiling"工具,快速扫描大规模结构中有用的,从而能从计算机模式中得到理想的特征结果。 大量的输出选项使您能跟其他程序共享数据、保存结构数据、键长、协调环境,甚至用您的数据创建网页。 出色的3D图片 深度渐变和视角转换,加上优美的三维立体结构,使您能看到照片质量的图片。高分辨率打印并把图片保存成各种文件格式,同时您还可以定义图片的大小。使用深度剖析和测量处理大规模的结构。完整的误差传递、集群壳和协调网络可视以及强大的输出选项,自动生成键长和多面体。 实时操纵与测量 用鼠标拖拉、键盘或工具栏,便可查看网格矢量或平面矢量。连续绘图范围设置可以设置数百万个原子,健和多面体。 移动、分离、复制、隐藏和删除原子组。隐藏或修复分子片段——分离单个分子。可在任何方位显示平面格。切割晶体结构以便研究其表面或内部平面。或把一个晶体或分子结构置于另一个结构中。 预览协调环境,集群和表面。列出键长和屏幕上的柱状图或保存到磁盘里。在屏幕上测量键长,角度,以及扭转角。在平面和向量间计算角度。
Crystal Ball 模拟基础教程
Crystal Ball 模拟基础教程 利用Crystal Ball 进行计算机仿真 学习目标13.2 个案研究:佛莱迪报童问题(13.1节) 13.3–13.19 竞标建设计划(13.2节) 13.20–13.24 项目管理:信用建设公司(13.3节)13.25–13.32 现金流量管理:沼泽地黄金岁月公司(13.4节) 13.33–13.37 财务风险分析:久大发展公司(13.5节)13.38–13.42 运输业收入管理(13.6节)13.43–13.48 选择合适的分配(13.7节)13.49–13.68 利用决策表做决策(13.8节) 13.69–13.84 学习目标 在读完本章后,你应该能够: 1. 描述Crystal Ball在计算机仿真中的角色。 2. 利用Crystal Ball来解决Excel软件包所无法执行的各类基本计算机仿真。 3. 解释利用Crystal Ball于计算机仿真中的结果。 4. 在获得预期的准确度水平后,利用Crystal Ball的特色来停止计算机仿真。 5. 描述当使用Crystal Ball时可以搭配计算机仿真的机率分配之特色。 6. 利用Crystal Ball程序辨识出符合历史数据的连续分配。 7. 利用Crystal Ball的特色来产生一些帮助决策的决策表和趋势图。 报童佛莱迪 佛莱迪在某大城市里主要市区经营一家报摊。 佛莱迪贩卖各类的报纸和杂志,其中最贵的报纸为财经日报。 财经日报相关的成本资料: –每份报纸的成本为1.50美元 –每份报纸的售价为2.50美元 –没售出的报纸,每份报纸可以获得0.50美元的偿还金 财经日报的销售资料: –佛莱迪每天的销售量介于40到70份之间。 –销售数量介于40到70份之间任何数值的频率相同。 运用仿真之电子表格模式 Crystal Ball的应用 利用Crystal Ball来进行计算机仿真有四个步骤: –定义随机输入栏。 –定义输出栏来预测。 –设定执行偏好。 –执行模拟。 步骤1:定义随机输入栏 随机输入栏是拥有随机数值的输入字段。 需要输入储存格的是假设的机率分配而非一永久的数值。 Crystal Ball将每个随机输入栏称作假设栏(assumption cell)。 定义假设栏的步骤 ?点选选定的字段。 ?假如字段没有数值,输入任何一个数字。 ?点选「Crystal Ball」标签(Excel 2007)或工具列(Excel较早版本)的「Define Assumption」
新员工带教方案V1.0
新员工带教方案 1、目的 (1)使新入职的员工尽快熟悉办公环境和公司员工,提高新员工对公司的满意度和认同度。(2)使新入职的员工初步了解工作内容和工作方式,尽快熟悉工作流程,更好的适应工作要求。 (3)评估新员工工作能力和工作态度,及时发现并解决工作中出现的问题。 2、方案周期 新员工带教方案分为两个阶段,总共六个月。第一个阶段:新入职到试用期结束的3个月;第二个阶段:新员工转正之后的三个月。 2.1第一阶段 第一个阶段主要是新员工的入职培训,使员工尽快适应工作环境和工作内容。具体实施如下: 2.1.1企业文化培训 新员工入职一周内,对新员工进行企业文化的带教,这个阶段主要由人力部门进行负责。主要涉及企业发展历史、企业文化、企业规章制度以及礼仪规范等,这个时期主要是提高新员工对公司的认知,增强员工对企业文化的认同度。在培训过程中,应与新员工建立一个友好的关系,让新员工以一种轻松的状态进入到公司环境中。 2.1.2岗位职责培训 在企业文化培训结束之后,新员工被安排到工作岗位上。从企业文化培训结束到实习期结束的这个时期,由部门主管,依据新员工的能力以及性格特点选择带教的人员,这个时期带教主要分为两个部分。 一是,对部门发展历史,工作内容,工作规范化以及工作流程的带教。帮助新员工更好了解工作流,尽快的适应新的工作内容,投入到工作中。具体流程如下: (1)制定带教计划 1)明确带教对象,针对带教对象的能力、性格等特点制定详细的带教工作计划 2)明确带教工作的内容,将工作内容分解到具体每日、每周以及每月,同时建立明确目标,考核标准以及激励奖惩办法。 (2)合理安排时间。避免出现见面就教的现状,合理利用不同时段进行教授与分享。(3)注重新员工的实践。俗话说:“授人以鱼不如授人以渔”。知识知道不等于能灵活运用,
风险管理软件CrystalBall操作指南(英文版)(doc 16页)
风险管理软件CrystalBall操作指南(英文版)(doc 16页)
Monte-Carlo Simulation with Crystal Ball? To run a simulation using Crystal Ball?: 1. Setup Spreadsheet Build a spreadsheet that will calculate the performance measure (e.g., profit) in terms of the inputs (random or not). For random inputs, just enter any number. 2. Define Assumptions—i.e., random variables Define which cells are random, and what distribution they should follow. 3. Define Forecast—i.e., output or performance measure Define which cell(s) you are interested in forecasting (typically the performance measure, e.g., profit). 4. Choose Number of Trials Select the number of trials. If you would later like to generate the Sensitivity Analysis chart, choose “Sensitivity Analysis” under Options in Run Preferences. 5. Run Simulation Run the simulation. If you would like to change parameters and re-run the simulation, you should “reset” the simulation (click on the “Reset Simulation” button on the toolbar or in the Run menu) first.
新员工带教流程
新员工带教流程 -标准化文件发布号:(9456-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII
新员工带教流程 第一天: 熟悉公司的作息时间,了解公司基本状况,基本服务礼仪与动作规范,学习做迎宾。 1、上班时间:10:00---19:30 12:00----21:00 (转正前) 10:00--16:00 14:30---21:00(转正后) 备注:时间根据季节调整。 2、管理手册:P1、江明商贸简介(了解即可,店长须以解说的方式进行); 3、服务礼仪:1)仪容仪表标准; 2)服务动作规范(站姿、蹲姿、距离、手势、角度); 3)学习做迎宾(声音、表情、语调、迎宾位置); 4)电话礼仪; 第二天: 了解公司的考勤制度,产品的风格分类及陈列 1、相关制度的了解:《考勤制度及请假报批程序》《离职程序》; 2、产品风格分类(①以鞋来区分:男鞋、女鞋、童鞋②以季节来区分:春秋单鞋、夏季凉鞋、冬靴③以鞋头区分:尖头、圆头、方头④以鞋跟来区分:平跟3CM以下、中跟3.1CM--5CM、高跟5.1CM---8CM、特高跟8.1CM 以上⑤以鞋帮来区分:凉(拖)鞋、中空鞋、浅口鞋、满帮(低腰)鞋、短靴(筒高14CM以下)、中靴(筒高15--22CM)、长靴(筒高23--36CM);(以店铺现有货品实物讲解方式进行带教) 3、了解什么是陈列,为什么做陈列、陈列标准及陈列原则。 第三天: 掌握《会员卡》的办理及使用规范,相关票据的填写及操作流程,鞋类产品从哪六个方面进行描述。 1、“会员卡”的申办标准及使用细则; 2、相关票据:《销售单、销售退货单》《调拨单》《会员单》正确填写; 3、鞋类产品从:楦型、皮料、底材、高度、风格、线条六方面描述(以实物操作讲解带教为标准); 4、服务1--2步:细节重点的掌握及实操应用。 第四天: 了解鞋类基本皮料、材质的特性及打理保养方法,所属品牌货号含义,FABE\法则应用,服务三、 四步,轮流做迎宾。 1、皮料特征及打理方法、皮料的分类(牛、羊、猪、打蜡、漆皮、磨砂皮);(以店铺现有货品实物讲解方式进行带教) 2、了解所属品牌货号的含义; 3、服务技巧之FABE、含义理解及应用; 4、服务三、四步的细节重点的掌握及实操应用。 第五天: 学习掌握公司销售技巧及服务规范流程和语言表达标准、掌握做报表及相关单据技能,初步了解库存及货品摆放位置,服务五、六步、协助做销售。 1、销售技巧:USP/AIDA的含义及实操应用(以场景模拟带教实操为主) AIDA A:注意(Attention) 1)商品陈列 2)导购员的仪容、仪表 3)精神奕奕热忱的招呼(三声) 4)卖场气氛 I:兴趣(Interest) 1)接近顾客了解顾客购物动机 2)让顾客触摸商品 3)有效介绍货品的特性及卖点 4)为顾客做参谋 5)邀请试穿 D:欲望(Desire) 1)介绍FAB及USB 2)强调物超所值不可代替 3)化解顾客疑虑及异议 A:行动(Action) 1)把握时机完成交易 2)介绍打理知识 3)介绍其他配成产品 4)付款过程快速 USP(Unique selling piont)独特销售点: 质料、设计款式、手工、处理方法、色彩、价钱 2、开放式与封闭式的语言技巧:产品推荐:O O C 促成销售: C O C 3、初步了解库存及货品的摆放位置、辅助老员工做销售 4、掌握报表的正确填写、各项单据的电脑操作
新员工带教手册
新员工带教教程
第一天 一、团队融入(熟悉店铺、成员) 1、认识店铺成员、姓名、店铺各职能岗位成员介绍及主要负责工作阐述,如同事、店 长、大店长、主管等 2、店铺环境及商场环境简单介绍:高价值陈列区、闲杂物品摆放区、卫生间等。 3、靓妆上岗,妆容必须按公司规定执行,包括:粉底、眉毛、眼影、眼线、唇彩、指 甲、头发。 4、新员工的服装到店穿着规定服装,衣着干净整齐,无异味。 5、始终保持积极、热情的店铺氛围,主动和进入店的顾客及身边路过的人微笑招呼 二、品牌介绍(企业文化简介、品牌成长历程、品牌风格) 企业文化简介 企业愿景—— 成为书写文化的领导者。 企业使命—— 追求全体员工物质与精神两方面幸福的同时,传承书写文化。 企业价值观—— 第一:恪守正确的做人准则。 第二:付出不亚于任何人的努力。 品牌成长历程 三、店鋪运营店规店纪、仪容仪表、导购职责) 3-1店规店纪店(日常事务) 1. 工作纪律 1)员工自觉遵守公司及商场的规章制度 2)自觉遵守规定的上下班时间,不得迟到早退或擅自离岗,离岗时需填写《离岗登记表》 3)请假必须办理请假手续 4)店铺员工用餐时间为30分钟 5)工作时间不能闲坐聊天,要定位定岗 6)上班时应精神饱满不能打瞌睡、发呆 7)服从工作安排和调动,以及上级主管的合理工作指示,按时完成任务
8)公司的文件、资料要妥善保管,严守秘密 9)工作时间不得接访亲友、朋友,可在休息时间接待 10)店内工作中不得使用手机闲聊或阅览网页及游戏 11)未经主管同意不得私自调班,未经批准不得不参加公司会议 12)必须按规定将货款交至收银台,自行收银店铺必须在规定时间内将货款存入公司规定银行账号,不得用职务之便私扣营业款 13)不得私自占有顾客遗失物品或损坏顾客财务 14)不得在公司或店铺内吵闹、粗言秽语和打架 15)不得将公司设备、财务、货品挪为私用,更不得偷盗或占为己有 16)货物盘点时如发现货品不正常流失,应第一时间向上级汇报; 17)不得私自为顾客打折 18)未经主管同意不得擅自为顾客换货、挑货、退货 19)员工之间互相帮助,团结友爱,有团队合作精神 2.服务行为规定 1)店内接待客人时应充分展示自身形象,严格按照公司《服务标准》执行,向客人树立良好的公司形象 2)柜台迎宾站姿端正,销售人员面带微笑 3)客人到柜及喊宾时,身体微鞠躬示意,声音适中,用好礼貌用语,为顾客提供超一流的服务 4)销售人员应积极主动给予顾客提供帮助,用语言引导顾客。 5)接待顾客过程中,注意语言行为应用,不要给客人留下不好印象 6)充分展示个人魅力,推广宣传自身品牌 7)销售人员应严格约束、自律、礼貌的为客人提供最优质的售后服务 3.柜台形象及卫生清洁责任制 1)按公司要求标准化陈列 2)内务货品摆放整洁,归纳清晰 3)私人物品摆放整洁 4)柜台所需设备及物品(税控机、POS机、扫码枪、生财物品及柜台陈列设施等)不得丢失及损坏 5)销售柜台坚决执行公司规定的清洁标准(1、柜台清洁无死角,灯箱明亮无损坏,光影投射位置准确,玻璃及陈列物品清洁无指纹及灰尘)(详见品牌形象篇) 6)柜台卫生监管制度为-当班值日员工做好柜台清洁后,填写店铺每日形象自查表,由店长或对班在检查人一栏签字确认 备注:具体员工准则参照《员工管理制度及行为规范》 3-2仪容仪表
前台新进员工带教手册V
前台新进员工带教手册 V 集团标准化办公室:[VV986T-J682P28-JP266L8-68PNN]
前台新进员工带教手册 目录 一、海友酒店介绍 1.1品牌故事 1.2产品特征 1.3目标客户群 二、海友酒店前台交接班制度 交接班准备 交接事项 填写交接班本 接班事项 交接班签名 三、海友酒店前台员工带教计划 带教目的 带教内容 一、海友酒店介绍: 1.1品牌故事 海友酒店是华住酒店集团(原汉庭酒店集团)旗下的风格经济型酒店连锁品牌,致力于为有预算要求的客人提供“欢乐、超值”的住宿产品。 我们全情投入,与顾客真诚沟通,分享快乐,为客人提供愉快、舒适的住宿体验。一切从我们的“HI”开始。。。。。。 2005年初,华住在中国正式创立,同年8月,第1家门店开业,2006年底,旗下的汉庭酒店第34家开业。2007年7月,华住以股权融资8500万美元创下中国服务行业首轮融资的新纪录,2007年底,汉庭酒店第74家开业。2008年初,汉庭在全国签约门店数达到180家,完成了全国主
要城市的布局,并重点在长三角、环渤海湾、珠三角和中西部发达城市形成了密布的酒店网络,成为国内成长最快的连锁酒店品牌之一。2008年4月,汉庭已开业酒店超过100家,出租率、经营业绩各项指标均在业内处于领先地位。 2008年2月,华住酒店集团正式成立,是国内第一家多品牌的酒店集团。华住致力于实现“中国服务”的理想,即打造世界级的中国服务品牌。华住的愿景是“成为世界住宿业领先品牌集团”,为此,我们将不断追求精细化的管理,实施标准化的体系和流程,更全面、更迅速地推进集团化发展。华住酒店集团旗下目前拥有禧玥酒店、星程酒店、汉庭酒店、全季酒店、海友酒店五个系列品牌,我们将坚持时尚现代、便捷舒适、高性价比的优势特点,塑造中国酒店的典范。1.2产品特征 装饰风格简约时尚 公共区域提供免费网吧 全酒店无线覆盖 独立淋浴、写字桌、电视机 提供大毛巾 自助理念 1.3目标客户群 有预算要求的商务客人、家庭型散客、青年群体、长住客、背包客 二、海友酒店前台交接班制度: 交班前准备 整理前台物品; 检查必备品和表格; 清点备用金; 核审本班次账目,账目无误后,才能下班; 完成本班的预订输入、入账等事项,并将相关表格归档; 完成本班公安系统登记录入; 完成前台卫生清洁工作。 2.2交接事项 以下事项如有特殊情况必须记录:预订情况、催账情况、叫醒、遗留物品、借物、留言、行李寄存、各类钥匙、房卡钥匙、有价证券、贵重物品寄存等; 当日重要事项; 上一班次交接尚未完成的事件必须写并与下一班交接; 需下班次跟进事宜; 本班未完成事宜。 2.3填写交接班本 记录宾客的问题、要求和投诉; 交接人填写交接事项栏相关内容; 交接重要工作任务; 接班人填写交接班时相关情况:备用金、发票、行李件数、会员卡、房卡等记录,并确认。 2.4接班事项 阅读《交接班本》及时询问相关事宜; 根据《物品借用记录本》交接借物,确保借物没有遗失; 查看贵重物品寄存记录与实际是否一致,钥匙是否齐全; 查看《遗留物品记录》询问前一班有无特殊情况; 查看《前台钥匙领用记录》是否正常; 小商品数量盘点交接情况(另附报表交接); 清点备用金,查看发票、行李并记录;