MapReduce并行计算技术发展综述
MapReduce并行计算技术发展综述
摘要:经过几年的发展,并行编程模型MapReduce产生了若干个改进框架,它们都是针对传统MapReduce的不足进行的修正或重写.本文阐述和分析了这些研究成果,包括:以HaLoop为代表的迭代计算框架、以Twitter为代表的实时计算框架、以ApacheHama为代表的图计算框架以及以ApacheY ARN为代表的框架管理平台.这些专用系统在大数据领域发挥着越来越重要的作用.
MapReduce[1]是Google公司于2004年提出的能并发处理海量数据的并行编程模型,其特点是简单易学、适用广泛,能够降低并行编程难度,让程序员从繁杂的并行编程工作中解脱出来,轻松地编写简单、高效的并行程序.针对上述问题,MapReduce并行编程模型的最大优势在于能够屏蔽底层实现细节,有效降低并行编程难度,提高编程效率.其主要贡献在于: 使用廉价的商用机器组成集群,费用较低,同时又能具有较高的性能; 松耦合和无共享结构使之具有良好的可扩展性; 用户可根据需要自定义Map、Reduce和Partition等函数; 提供了一个运行时支持库,它支持任务的自动并行执行.提供的接口便于用户高效地进行任务调度、负载均衡、容错和一致性管理等; MapReduce适用范围广泛,不仅适用于搜索领域,也适用于满足MapReduce要求的其它领域计算任务
2 MapReduce总体研究状况
最近几年,在处理TB和PB级数据方面,MapReduce
已经成为使用最为广泛的并行编程模型之一.国内外MapReduce相关的研究成果主要有以下几方面:
(1)在编程模型改进方面:MapReduce存在诸多不足.目前,典型研究成果有Barrier-lessMapReduce[6]、MapReduceMerge[7]、Oivos[8]、Kahnprocessnetworks[9]等.但这些模型均仅针对MapReduce某方面的不足,研究片面,并且都没有得到广泛应用,部分模型也不成熟
(2)在模型针对不同平台的实现方面:典型研究成果包括:Hadoop[10]、Phoenix[11,12]、Mars13]、CellMapRe-duce[14]、Misco[15]和Ussop[16]部分平台(例如:GPUs和Cell/B.E.)由于底层硬件比较复杂,造成编程难度较大,增加了用户编程的负担.
\(3)在运行时支持库(包括:任务调度、负载均衡和容错)方面:常用的任务调度策略是任务窃取,但该策略有时会加大通信开销.典型的研究成果包括:延迟调度策略[17]、LATE调度策略[18]和基于性能驱动的任务调度策略[19]等.在容错方面的典型研究成果是reduce对象[20].目前,运行时支持库中针对一致性管理和资源分配等方面的研究相对较少.
(4)在性能分析与优化方面: 目前, 文献[ 21]主要研究在全虚拟环境下MapReduce 性能分析, 文献[ 22]则提出了名为MRBench 的性能分析评价指标. 性能优化典型成果包括: 几何规划[ 23]、动态优先级管理[ 24]和硬件加速器[ 25]等. 着眼于性能, 结合运行时支持库, 将是MapReduce研究的热点之一.
(5)在安全性和节能方面: 安全性方面典型研究成果是Sec ureMR模型[ 2 6]. 文献[ 27]和文献[ 28] 则在节能方面做了相应的研究. 目前国内外在安全性和节能方面的研究成果相对较少, 但是这方面研究的重要性已经得到了越来越多的重视. 如果一个模型没有很高的安全性, 同时也没有很好地考虑功耗问题, 那对其大范围推广将产生致命的影响.
(6)在实际应用方面: MapReduce 应用范围广泛,Google 等诸多公司都在使用MapReduce 来加速或者简化各自公司的业务[ 29]. MapReduce 还广泛应用于云计算[ 3 0]和图像处理[ 31]等领域. 随着科技的进步, MapRe -duc e 将会得到越来越广泛的应用
.国内学者MapReduce 相关研究成果主要集中在实际应用方面. 例如, 把MapReduce 应用于模式发现[ 32]和数据挖掘[ 3 3]等领域. 部分研究成果涉及模型针对不同平台的实现、任务调度、容错和性能评估优化. 例如, 文献[ 34]提出了名为FPMR 的基于FPGA 平台的
MapRe -duc e 实现, 文献[ 35]提出了基于已知数据分布的任务调度策略, 文献[ 36]提出了名为SAMR的异构环境下自适应任务调度策略, 文献[ 37]提出了基于目录的双阶段错误恢复机制, 文献[ 38]提出了名为The HiBench Bench -mark Sui te 的性能评估指标, 文献[ 39]提出利用分布式的研究起步稍晚, 绝大部分研究集中在应用方面. 对MapReduce 关键技术也进行了研究. 但是相对于国外,国内在这些方面的研究成果较少
.3 MapReduce模型及其改进
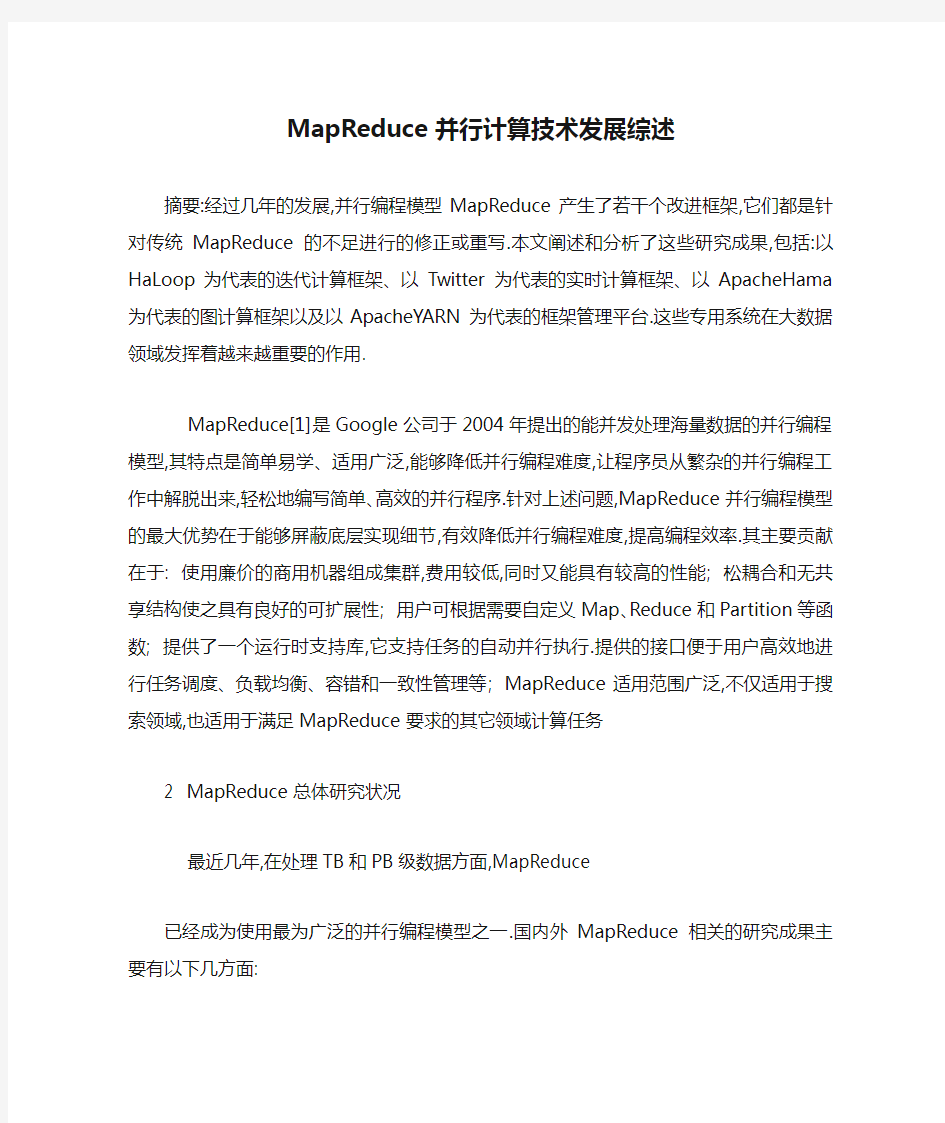
Google 公司最早提出了MapReduce 并行编程模型,当用户程序调用MapReduce运行时支持库时, 其执行过程如下(如图1 所示) :
( 1)首先, 用户程序把输入数据分割成M 份, 每份为16MB到64MB大小的数据块(可通过参数来设定) .然后, 开始在集群上进行程序的拷贝. 这些程序拷贝中有一份是Master,其余都是向Maste r 请求任务的Worker;
( 2)一旦分配到Map任务,Worke r 便从相应的输入数据中分析出ke y/ value 对, 并把每个key/ value 对作为用户定义的Map函数的输入. Map函数产生的中间值key/ value 对被存储在内存中;
( 3)存储在内存里的中间值key/ value 对会被定期写入本地磁盘中, 用户定义的Parti tion函数将其划分为多个部分,Master 负责把这些中间值key/ value对在本地磁盘上的存储位置传送给执行Reduce 任务的Worker;
( 4)通过远程过程调用, 执行Reduce 任务的Worker从执行Map任务的Worker 的本地磁盘读取中间值ke y/value对;
( 5)当一个执行Reduce 任务的Worker 从远程读取到所有所需的中间值key/ value 对之后, 通过排序将具有相同key的中间值key/ value对聚合在一起, 形成ke y/value s 对, 作为Reduce 函数的输入;
( 6)每个Reduc e 函数的输出分别放到相应的输出文件中. 当所有的Map和Reduce 任务都执行完毕,Mas -ter 唤醒用户程序. 此时, 用户程序中的MapReduce 调用返回用户代码. MapReduce 可以处理TB和PB量级的数据, 能很方便地在许多机器上实现数据密集型计算的并行化. 算法1 给出基于MapReduce 的单词统计程序伪代码, 程序功能是统计文本中所有单词出现的次数.Map函数产生每个词和这个词的出现次数(在本例中就是1) . Reduce函数把产生的每一个特定词的计数加在一起.上述要求MapReduce 缺乏支持处理多个相关异构数据集的能力. 为此, 文献[ 7] 提出了MapReduceMerge 并行编程模型, 对多个异构数据集分别执行Map和Reduce 操作,之后在Merge 阶段把Reduce 阶段已分割和分类融合的数据进行有效地合并.
MapReduceMerge尽管能够处理多个相关异构数据集, 但是并不支持自动执行多次MapReduceMerge 过程.当用户手动执行多次MapReduce 或者MapReduceMe rge过程时, 用户需要解决任务调度、同步性和容错等问题, 编程负担过重. 为此, 文献[ 8] 提出了Oivos 并行编程模型, Oivos 利用抽象层来实现自动管理执行多次MapReduce 或者MapReduceMe rge过程. Oivos需要用户指定处理多个相关异构数据集所需MapReduce 或者MapReduceMe rge过程的个数, 并通过检测逻辑时间戳来自动发现哪些任务需要重新执行.
MapReduce 并行编程模型死板, 且不能很好地适应小规模集群. 为此, 基于消息传递和无共享模型, 文献[ 9]提出了名为KPNs ( Kahn process ne tworks)的并行编程模型. KPNs可自动执行迭代计算, 且编程灵活(例如:KPNs的输入不必抽象成key/ value 对的形式) . 同时, 把串行算法改写成KPNs 形式仅需在恰当的地方插入通信状态. 但是该模型仍需大量的实验来验证其性能与可扩展性.
表1显示了MapReduce 并行编程模型及其改进研究对比. 通过比较不难看出, 以Google
公司提出的MapReduce为基础, 针对其不足, 很多研究学者进行了相关研究, 并取得了一定的研究成果. 但是仍存在着一些不足: 首先, 这些模型均仅针对MapReduce 某个方面的不足, 研究较为片面, 并且都没有得到广泛的应用.其次, 部分模型并不成熟, 仍需要进一步的实验来验证其性能与可扩展性.最后, 没有研究结合不同模型的特点, 得出一个全面优化的并行编程模型
3. 2 针对不同平台实现方面的研究
受到Google 公司提出的MapReduce 并行编程模型启发, 目前被广泛使用的代表是Hadoop. 它是一个开源的可运行于大型分布式集群上的并行编程框架, 提供了一个支持MapReduce 并行编程模型的部件.Hadoop具有良好的存储和计算可扩展性; 具有分布式处理的可靠性和高效性; 具有良好的经济性(运行在普通PC 机上) .
Hadoop也存在一些不足: 小块数据处理由于系统开销等原因处理速度并不一定比串行程序快; 如果计算产生的中间结果文件非常巨大, Reduce 过程需要通过远程过程调用来获取这些中间结果文件, 会加大网络传输的开销; Hadoop 作为一个比较新的项目,性能和稳定性的提升还需一定时间.
随着科技的进步与硬件平台的发展, 许多研究学者在不同的实验平台上实现了MapReduce, 并取得了一定的研究成果. 其主要的研究成果包括:
(1)在共享内存平台上: 斯坦福大学计算机系统实验室在共享内存系统上实现了MapReduce, 被称为Phoenix. Phoenix 采用线程来实现Map和Reduce任务, 同时利用共享内存缓冲区实现通信, 从而避免了因数据拷贝产生的开销. 但Phoenix 也存在不能自动执行迭代计算、没有高效的错误发现机制等不足.(2)在GPUs 平台上: Mars 是基于GPUs( 图形处理器)的MapReduce 实现.Ma rs也具有Map与Reduce 这两个步骤. 在每个步骤开始之前, Mars对线程配置进行初始化(包括:线程组的个数、每个线程组中线程的个数等) . 由于GPU线程不支持运行时动态调度, 所以给每个GPU 线程分配的任务是固定的. 若输入数据划分不均匀, 必将导致Map或者Reduce 阶段的负载不均衡, 使得整个系统性能急剧降低. 同时由于GPU 不支持运行时在设备内存中分配空间, 需要预先在设备内存中分配好输入数据和输出数据的存放空间. 但是在Map 和Reduce阶段输出数据大小是未知的, 并且当多个GPU线程同时向共享输出区域中写数据时, 易造成写冲突.另外, 由于Mars的编程接口是为图形处理而专门设计的, 因此用户编程较为复杂.
(3) 在Cell / B. E. 平台上: Cell MapReduce 是基于Cell / B. E. (Cell宽带引擎)的MapReduce 实现. 将MapRe -duc e 移植到Cell / B. E. 架构主要存在三个问题: 必须实现全局内存与SP E 内存之间的内存管理和交换; 由于主要负责Map和Reduce 任务执行的SPE 内存是由软件管理的, 因此需要通过内存交换来解决计算重叠问题; 在Map和Reduce 阶段之间存在一个逻辑聚合阶段, 该阶段需要在各SPE 之间高效执行. 为此, CellMapReduce提出: 通过块DMA 传输来预先分配Map和Reduce 任务的输出区域, 以达到解决内存管理的目的; 提出通过双缓冲区和流数据的内存交换来实现计算并行化; 提出通过双阶段Parti tion 和Sort处理来实现逻辑聚合. 综上, 该模型为用户提供了一个简单的机器抽象, 隐藏了并行实现与硬件的细节. 而且还提供了一套API和运行时系统来自动管理同步性、调度、分块和内存交换等工作. 然而, 虽然Cell/B. E. 处理单元之间有很高的带宽, 但是Cel l/ B. E. 没有为协同处理单元提供一致性的存储器, 同时程序员必须仔细管理进出
于各个SPE的数据移动, 编程难度太大.
( 4)在FPGA 平台上: 近年来, FPGA(现场可编程门阵列)开始应用于高性能计算应用中[ 40]. 相对于其它并行计算平台, FPGA 具有可重构性、高灵活性和严格遵守摩尔定律的优势. 但是, 基于FPGA 的计算亦受到硬件结构的设计开发和寄存器级数据传输的限制, 导致编程效率较低. 为此, 文献[ 34]提出了名为FPMR的基于FPGA的MapReduce实现. 首先, 利用
FPGA的可重构性, 在片上实现多个Map与Reduce任务, 以实现较好的性能. 其次, 通过片上动态调度策略来实现较好的资源利用率和负载均衡, 以达到把编程人员从具体任务控制和通信操作中解放出来的目的. 最后, 通过高效的数据获取策略来实现最大化数据的重利用和解决带宽瓶颈. 但是FPMR 不支持利用页式硬件进行动态内存管理, 同时也需要更多的实验来验证FPMR的效率和生产力.
( 5)在分布式移动平台上: 功能强大的移动设备的不断普及, 便于提供一个功能强大的分布式移动计算环境. 但是, 在这样的环境中, 软件开发和应用部署都面临着易出错、同步性困难、资源分配复杂、缺少编程模型支持等问题. 同时, 若把MapReduce 应用于移动网络将具有很差的计算连通性. 为此, 文献[ 15] 提出了名为Misco 的基于分布式移动平台的MapReduce 实现.Misc o 由一个Ma ste r Server 和一系列Worker Nodes 组成.其中,Master 和Worker 之间采用基于轮询[ 41]的通信机制, 使用HTTP的方式来传输数据.Master Server 时刻跟踪用户应用, 负责其任务调度与分配, 保存与应用相关的输入数据、中间值和最终结果. Worke r Nodes 则负责执行Map与Reduce 任务. 但是由于轮询的时间间隔不好确定, 若时间间隔设置不当, 会显著降低程序的执行性能.
(6) 在公共资源网格平台上: 文献[ 16] 提出名为Ussop 的基于公共资源网格环境的MapReduce 实现. 针对网格资源的异变性和广域网中进行数据交换开销大的特点,Ussop 提出了两个任务调度算法, 一个能根据网格节点的计算能力, 自适应Map 输入的粒度. 另一个能最小化在广域网传输中间数据的开销. 但是Ussop 缺乏高效的容错机制, 当一个节点因处于过载状态而无法给Map任务分配资源时, 只能在其它节点重新执行该任务, 无法做到资源的重新分配或者任务迁移.表2显示了MapReduce 针对不同平台的实现研究对比. 由表2可知, 除了Hadoop 之外, 其它的实现都没有得到广泛的应用. 同时一些实现(例如: Mars 和Cel lMapReduce)由于底层硬件比较复杂或者底层硬件架构的限制, 造成用户编程难度较大, 增加了用户负担, 不利于其大范围推广.
4 运行时支持库及其改进 MapReduce 运行时支持库是MapReduce 实现的基础,它能有效进行任务调度、负载均衡、容错和一致性管理等, 能够隐藏底层细节, 降低用户编程的难度.4 1 任务调度及负载均衡方面的研究MapReduce并行编程模型采用基于数据存储位置的任务窃取调度策略. 如果某个Worke r 的本地任务列表非空, 则首先执行该列表的第一个任务; 如果某个Worker 的本地任务列表为空, 则从与之最近的Worker窃取任务来执行. 这样能够减少通信开销, 提高系统性能. 但是,该策略也存在如下几点不足:
(1)如果数据分布不均匀, 会有更多的Map 任务不能在本地执行. 此时, 该策略反而会增大通信开销, 导致性能下降. 为此, 文献[ 35]提出了基于已知数据分布的MapReduce 任务调度策略. 该调度策略基于节点和任务的优先级, 充分考虑系统中数据的分布, 将任务调度给合适的节点. 这样就能实现以较高的概率将Map 任务分配给本地有数据的节点, 从而减少通信开销, 提高系统性能.
(2)MapReduce 任务调度策略存在调度的公平性和数据存储位置(即为具有输入数据的节点分配任务)之间的冲突. 即依照严格的任务队列顺序, 一个没有本地数据的任务会被强制调度, 这会增加通信开销. 为此,文献[ 17]提出了延迟调度算法. 当节点请求任务时, 如果任务列表中的第一个任务不能在本地启动, 则系统自动跳过该任务, 查询下一个任务, 直至找到一个能在本地启动的任务. 当然, 如果一个节点请求任务时跳过的任务过多, 系统将允许其启动数据不在本地的任务.
( 3)有时候, 多个MapReduce 任务需要共享相同的物理资源. 这就有必要预测和管理每个任务的性能, 据此为每个任务分配合适的资源. 为此, 文献[ 19]提出了基于性能驱动的任务调度策略. 该策略能动态预测当前MapReduce任务的性能, 并且能够为该任务调整资源分配, 使之既能达到应用的性能目标, 又不会占用过多的资源.
( 4) MapReduce 为节约响应时间采用预测执行机制, 即若一个节点可获得但是性能很差, 那么MapRe -duce 会把运行在该节点上任务作为备份任务在其它节点上运行. 但是这种机制在异构环境中会导致程序性能的降低, 为此, 文献[ 18]提出了名为LATE( Longest Ap -proxima te Time to End)的任务调度策略. LATE 通过计算所有任务的剩余时间来找到执行最慢的任务作为备份任务, 这样就能有效缩短MapReduce在异构环境中的响应时间. 但是LATE 并不能正确计算任务的剩余时间,因而不能找到真正执行最慢的任务, 同时也不能适应异构环境的动态变化. 为此, 文献[ 36] 提出了名为SAMR( Sel - f Adaptive MapReduce) 的任务调度策略, 通过记录在每个节点上的任务执行历史信息, SAMR能动态找到真正执行最慢的任务作为备份任务. 但是SAMR在执行备份任务时, 并没有考虑数据的存储位置, 同时SAMR仍需在不同的平台下进行评估测试
综上, 针对MapReduce 并行编程模型采用的任务调度策略的特点, 很多学者进行了相关研究, 并取得了一定的研究成果. 但是这些研究成果没有充分考虑数据存储位置及其动态变化, 不能根据数据划分的粒度, 自动选择合适的任务调度策略.
4 2 容错方面的研究
MapReduce并行编程模型被设计用于使用数目众多的机器处理海量数据, 因此MapReduce 运行时支持库必须能够很好地处理发生的机器故障.
在MapReduce 并行编程模型中,Worke r 节点采用基于响应的错误恢复机制.Master节点周期性地ping 每个Worker 节点. 如果在一个时间段内Worke r 节点没有返回信息,Master 节点就会标注该Worke r 节点失效. 由该失效Worker 完成的所有任务将被重新设置成初始空闲状态, 并被分配给其它Worke r 执行.
Master节点采用基于检查点的错误恢复机制. Mas -ter节点周期性地写入检查点. 如果Master 任务失效了,则可从最后一个检查点来启动另一个Master 进程
检查点和日志[ 4 2]是两种被广泛使用的错误回滚恢复机制. 在MapReduce 并行编程模型中, Worker 节点采用基于响应的错误恢复机制, Master 节点采用基于检查点的错误恢复机制.但是, 基于响应的错误恢复机制不能实现低开销和高效性, 基于检查点的错误恢复机制在创建检查点时开销较大. 同时基于日志的错误恢复机制虽然较简单(错误恢复时所需的所有信息都在日志中) , 但是在跨网络传输较大的日志文件时, 会造成较大的网络带宽浪费, 并可能延迟应用数据的传输. 为此,文献[ 37]提出基于日志的双阶段错误恢复机制, 把日志分为basic和e xtra 两部分, 同时把恢复机制分成两阶段, 以减少状态信息的传输, 该机制在节省网络带宽的同时能够优化全局性能.
在MapReduce并行编程模型中, 如果Worke r 节点发生错误, 需要重启该节点上运行的所有Map 或Reduce任务, 不能实现低开销和高效性. 为此, 文献[ 20]提出了基于选择性的API 来实现数据密集型应用的并行化. 该API提供了一个由用户声明的reduce 对象, 该对象是任何节点的计算状态集合. 当某个节点出错时, 该节点未处理的数据可被其它节点处理. 从出错节点上拷贝过来的reduce 对象与其它节点上的reduce 对象一起来产生最终的正确结果. 这样就能实现低开销和高效的容错机制.
综上, 针对MapReduce 并行编程模型, Google 公司提出的容错策略不够完善, Master 节点容错开销过大,Worker 节点容错很容易产生重复计算, 造成计算资源的浪费. 对此许多研究学者进行了相关研究, 并取得了一定的研究成果. 但这些研究主要是针对Worke r 节点
的容错, 针对Master节点容错的研究较少.
5 总结及未来的发展趋势
目前, 国内外众多研究人员已对MapReduce 并行编程模型所涉及的关键技术( 包括: 模型改进、模型针对不同平台的实现、任务调度、负载均衡和容错) 进行了卓有成效的研究. 预计在今后的一段时期内, 与MapRe -duce 并行编程模型相关的研究可能会朝着以下
几方面进行:
( 1)逐步形成完善的MapReduce 并行编程模型规范. 它统一定义MapReduce并行编程模型的各个组成部分(例如:Map、Parti tion、Sort、Reduc e 和Me rge等) , 将现存的多种定义一致起来, 形成能够长期有效的统一定义规范. 它支持并行计算和分布式应用, 具有良好的自适应能力与性能预测能力, 能够满足较高的性能要求.( 2)由于MapReduce并行编程模型主要用于大规模数据集(TB甚至PB级)的并行处理. 因此, 性能问题将成为研究的重点之一.可着眼于性能, 研究MapRe duc e 并行编程模型, 在Ma pReduce 并行编程模型的实现中采取多种提高性能的手段(例如: 减少数据拷贝, 改进节点间数据传输方法, 改进运行时支持库的任务调度机制, 改进内存管理, 采用高效的同步机制和性能预测等) .(3) 随着云计算的兴起与进一步发展, MapReduce并行编程模型的大规模底层基础设施建设(例如: Ama -zon 的EC2与S3[ 43]等) 将成为研究的热点, 这也是基于MapReduce 并行编程模型的各种应用(例如: 云计算等)的实现根本.( 4)针对不同的实验平台实现MapReduce并行编程模型. 已有学者将MapReduce并行编程模型从最初的普通多核分布式系统, 移植到共享内存和Cell / B. E. 架构等环境中. 将来MapReduce并行编程模型会被移植到更多的实验平台上(例如: 物联网[ 44- 45]等) . 同时已有平台上的实现会进一步优化.( 5)MapReduce并行编程模型的应用领域将进一步扩大. 目前MapReduce 已被各大互联网公司所采用, 并且在云计算和图像处理等领域得到了广泛的应用. 相信将来更多的公司会采用MapReduce并行编程模型, 同时针对不同的应用领域, 开发出更多的专用模型.综上所述,MapReduce 并行编程模型的研究是一个充满前途和挑战的领域, 它改变着大规模数据集的并行计算方式, 必将在并行计算领域发挥越来越重要的作用
并行计算综述
并行计算综述 姓名:尹航学号:S131020012 专业:计算机科学与技术摘要:本文对并行计算的基本概念和基本理论进行了分析和研究。主要内容有:并行计算提出的背景,目前国内外的研究现状,并行计算概念和并行计算机类型,并行计算的性能评价,并行计算模型,并行编程环境与并行编程语言。 关键词:并行计算;性能评价;并行计算模型;并行编程 1. 前言 网络并行计算是近几年国际上并行计算新出现的一个重要研究方向,也是热门课题。网络并行计算就是利用互联网上的计算机资源实现其它问题的计算,这种并行计算环境的显著优点是投资少、见效快、灵活性强等。由于科学计算的要求,越来越多的用户希望能具有并行计算的环境,但除了少数计算机大户(石油、天气预报等)外,很多用户由于工业资金的不足而不能使用并行计算机。一旦实现并行计算,就可以通过网络实现超级计算。这样,就不必要购买昂贵的并行计算机。 目前,国内一般的应用单位都具有局域网或广域网的结点,基本上具备网络计算的硬件环境。其次,网络并行计算的系统软件PVM是当前国际上公认的一种消息传递标准软件系统。有了该软件系统,可以在不具备并行机的情况下进行并行计算。该软件是美国国家基金资助的开放软件,没有版权问题。可以从国际互联网上获得其源代码及其相应的辅助工具程序。这无疑给人们对计算大问题带来了良好的机遇。这种计算环境特别适合我国国情。 近几年国内一些高校和科研院所投入了一些力量来进行并行计算软件的应用理论和方法的研究,并取得了可喜的成绩。到目前为止,网络并行计算已经在勘探地球物理、机械制造、计算数学、石油资源、数字模拟等许多应用领域开展研究。这将在计算机的应用的各应用领域科学开创一个崭新的环境。 2. 并行计算简介[1] 2.1并行计算与科学计算 并行计算(Parallel Computing),简单地讲,就是在并行计算机上所作的计算,它和常说的高性能计算(High Performance Computing)、超级计算(Super Computing)是同义词,因为任何高性能计算和超级计算都离不开并行技术。
集成电路的现状与发展趋势
集成电路的现状与发展趋势 1、国内外技术现状及发展趋势 目前,以集成电路为核心的电子信息产业超过了以汽车、石油、钢铁为代表的传统工业成为第一大产业,成为改造和拉动传统产业迈向数字时代的强大引擎和雄厚基石。1999年全球集成电路的销售额为1250亿美元,而以集成电路为核心的电子信息产业的世界贸易总额约占世界GNP的3%,现代经济发展的数据表明,每l~2元的集成电路产值,带动了10元左右电子工业产值的形成,进而带动了100元GDP的增长。目前,发达国家国民经济总产值增长部分的65%与集成电路相关;美国国防预算中的电子含量已占据了半壁江山(2001年为43.6%)。预计未来10年内,世界集成电路销售额将以年平均15%的速度增长,2010年将达到6000~8000亿美元。作为当今世界经济竞争的焦点,拥有自主版权的集成电路已曰益成为经济发展的命脉、社会进步的基础、国际竞争的筹码和国家安全的保障。 集成电路的集成度和产品性能每18个月增加一倍。据专家预测,今后20年左右,集成电路技术及其产品仍将遵循这一规律发展。集成电路最重要的生产过程包括:开发EDA(电子设计自动化)工具,利用EDA进行集成电路设计,根据设计结果在硅圆片上加工芯片(主要流程为薄膜制造、曝光和刻蚀),对加工完毕的芯片进行测试,为芯片进行封装,最后经应用开发将其装备到整机系统上与最终消费者见面。 20世纪80年代中期我国集成电路的加工水平为5微米,其后,经历了3、1、0.8、0.5、0.35微米的发展,目前达到了0.18 微米的水平,而当前国际水平为0.09微米(90纳米),我国与之相差约为2-3代。 (1)设计工具与设计方法。随着集成电路复杂程度的不断提高,单个芯片容纳器件的数量急剧增加,其设计工具也由最初的手工绘制转为计算机辅助设计(CAD),相应的设计工具根据市场需求迅速发展,出现了专门的EDA工具供应商。目前,EDA主要市场份额为美国的Cadence、Synopsys和Mentor等少数企业所垄断。中国华大集成电路设计中心是国内唯一一家EDA开发和产品供应商。 由于整机系统不断向轻、薄、小的方向发展,集成电路结构也由简单功能转向具备更多和更为复杂的功能,如彩电由5片机到3片机直到现在的单片机,手机用集成电路也经历了由多片到单片的变化。目前,SoC作为系统级集成电路,能在单一硅芯片上实现信号采集、转换、存储、处理和I/O等功能,将数字电路、存储器、MPU、MCU、DSP等集成在一块芯片上实现一个完整系统的功能。它的制造主要涉及深亚微米技术,特殊电路的工艺兼容技术,设计方法的研究,嵌入式IP核设计技术,测试策略和可测性技术,软硬件协同设计技术和安全保密技术。SoC以IP复用为基础,把已有优化的子系统甚至系统级模块纳入到新的系统设计之中,实现了集成电路设计能力的第4次飞跃。
惯性导航系统发展综述报告
惯性导航系统发展综述报告 学号:姓名: 摘要:本文介绍了惯性导航系统的主要组成、基本原理、分类以及优缺点。列举了惯性导航系统在当前的主要应用领域及发展趋势。 关键词:惯性导航系统、陀螺仪、加速度计、GPS、组合导航 一.引言 美国《防务新闻》网站报道称,美军正在研制新型导航定位设备,以替代现在广泛使用的GPS卫星定位导航系统。GPS之所以被美军诟病,主要是由于该系统过于依赖脆弱的天基卫星系统。卫星在战时极易被干扰、破坏,或受到网络攻击,自身安全性难以得到有效保证。为有效解决GPS安全性问题和美军对精确定位、导航、授时服务的需求之间难以调和的矛盾,美军开始积极寻求GPS 的替代品。据称,基于现代原子物理学最新成就的微型惯性导航技术是未来代替GPS的一个重要的技术解决方案。 惯性导航系统是人类最早研发明的导航系统之一。早在1942年德国在V-2火箭上就率先应用了惯性导航技术。从2009年,美国国防部先进研究项目局就深入进行新一代微型惯性导航技术的研发与测试工作。据悉,这种新一代导航系统主要通过集成在微型芯片上的三个原子陀螺仪、加速器和原子钟精确测量载体平台相对惯性空间的角速率和加速度信息,利用牛顿运动定律自动计算出载体平台的瞬时速度、位置信息并为载体提供精确的授时服务。 美军也对该系统的未来发展充满信心。安德瑞·席克尔认为,就像30年前人们没有预想到GPS会发展到目前如此程度一样,在未来20年新一代微型惯性导航系统的发展程度也是无可限量的。 从此报道中可以看出研究惯性导航技术的重要作用。 二.惯性导航系统的概念 惯性导航(inertial navigation)是依据牛顿惯性原理,利用惯性元件(加速度计)来测量运载体本身的加速度,经过积分和运算得到速度和位置,从而达到
光刻工艺概述
光刻工艺流程图 一前处理(OAP) 通常在150~200℃对基片进行烘考以去除表面水份,以增强光刻胶与硅片的粘附性。(亲水表面与光刻胶的粘附性差,SI的亲水性最小,其次SIO2,最后PSI玻璃和BSI玻璃) OAP的主要成分为六甲基二硅烷,在提升光刻胶的粘附性工艺中,它起到的作用不是增粘剂,而是改变SiO2的界面结构,变亲水表面为疏水表面。OAP通常采用蒸汽涂布的方式,简单评
价粘附性的好坏,可在前处理过的硅片上滴一滴水,通过测量水与硅片的接触角,角度越大, SI 二、匀胶 光刻胶通常采用旋涂方式,在硅片上得到一层厚度均匀的胶层。影响胶厚的最主要因素:光刻胶的粘度及旋转速度。次要因素:排风;回吸;胶泵压力;胶盘;温度。 胶厚的简单算法:光刻胶理论的最小胶厚的平方乘以理论的转速=目标光刻胶的胶厚的平方乘以目标转速 例如:光刻胶理论厚度1微米需要转速3000转/分,那需要光刻胶厚度1.15微米时转速应为 12 *3000/1.152 三、前烘 前烘的目的是为了驱除胶膜中残余的溶剂,消除胶膜的机械应力。前烘的作用: 1)增强胶层的沾附能力;2)在接触式曝光中可以提高胶层与掩模板接触时的耐磨性能;3)可以提高和稳定胶层的感光灵敏度。前烘是热处理过程,前烘通常的温度和时间: 烘箱90~115℃ 30分钟 热板90~120℃ 60~90秒 四、光刻 光刻胶经过前烘后,原来液态光刻胶在硅片表面上固化。光刻的目的就是将掩膜版上的图形转移到硅片上。曝光的设备分类接触式、接近式、投影式、步进式/扫描式、电子束曝光、软X射线曝光。 五、显影 经过显影,正胶的曝光区域和负胶的非曝光区域被溶解,正胶的非曝光区域和负胶的曝光区域被保留下来,从而完成图形的转移工作。正胶曝光区域经过曝光后,生成羧酸与碱性的显影液中和反应从而被溶解。负胶的曝光区域经过曝光后产生胶联现象,不被显影液溶解。而未曝光的区域则被显影液溶解掉。定影液的作用是漂洗显影过程中产生的碎片,挤出残余的显影液,另外还可以起到收缩图形,提高图形的质量。
民航导航技术的发展现状及发展趋势
民航导航技术的发展现状及发展趋势 引言 导航是一种为运载体航行时提供连续、安全和可靠服务的技术。航空和航海的需求是导航技术发展的主要推动力。尤其是航空技术,由于飞机在空中必须保持较快的运动速度,留空时间有限,事故后果严重,对导航提出了更高的要求;同时飞机所能容纳的载荷与体积较小,使导航设备的选择受到较大的限制。对于航空运输系统来讲,导航的基本作用就是引导飞机安全准确地沿选定路线、准时到达目的地。 自无线电导航技术的广泛应用以来,导航已从通过观测地形地物、天体的运动以及灯光电磁现象,改变为主要依赖电磁波的传播特性来实现,部分摆脱了天气、季节、能见度和环境的制约,以及精度十分低下的状况。飞机在云海茫茫的天上,能随时掌握自己的位置,大大降低了飞行安全风险。导航已成为民航完全可以依赖的技术手段,促进了世界民航事业的发展。 20年代70世纪发展起来的信息技术使导航技术呈现了新面貌。卫星导航(GPS和GLONASS)以及其增强系统和组合系统,已经能够方便、廉价地为全球任何地方、全天候提供较高精度和连续的位置、
速度、航姿和时间等导航信息,成为支持未来航空运输发展的又一股强大动力。 1民航导航技术的现状 1.1支持航路的导航技术 1.1.1惯性导航系统 从20世纪20年代末开始,虽然陆基无线电导航逐渐成为航空的主要导航手段,但由于需要地面系统或设施的支持,无法实现自主定位和导航,限制了航空的发展。首先,军事上对导航系统提出了生存能力、抗干扰、反利用和抗欺骗的需求,具有自主导航能力的惯性导航系统(INS)于60年代在航空领域投入使用。但民用飞机采用INS 的主要原因是由于INS提供的导航信息连续性好,导航参数短期精度高,更新速率高(可达50~1000Hz)。 20世纪70年代后,由于数字计算机的使用和宽体飞机的发展,INS也开始了大发展阶段。由于INS具有许多陆基导航系统不具备的优点,尤其是可以产生包括飞机三维位置、三维速度与航向姿态等大量有用信息,在民航中得到了应用,是民航飞机的基本导航系统。当然它自生的垂直定位功能不好误差是发散的,不能单独使用,在现代
半导体光刻技术发展情况综述
半导体光刻技术发展情况综述 2007-04-27 21:52 从第一个晶体管问世算起,半导体技术的发展已有多半个世纪了,现在它仍保持着强劲的发展态势,继续遵循Moore定律即芯片集成度18个月翻一番,每三年器件尺寸缩小0.7倍的速度发展。现在片径已达300mm,DRAM半节距已达150nm,MPU栅长达100nm。大尺寸、细线宽、高精度、高效率、低成本的IC生产,对半导体设备带来前所未有的挑战。为此,世界上各半导体设备厂商,集中优势力量,加大研发投资,进行攻关,抢占制高点,同时又加强联合、兼并,做到优势互补,力争不失时机地为新一代技术提供大生产设备。本文就当前最为关键的半导体设备做一介绍。 一、硅片直径300mm要适合多代技术的需求 经济利益的驱动是硅片直径由200mm向300mm转移的主要因素,300mm 的出片率是200mm的2.5倍,单位生产成本降低30%左右。300mm工厂投资为15到30亿美元,其中约75%用于设备投资,因此用户要求设备能向下延伸3至4代。300mm片径是从180nm技术节点切入的,这就要求设备在150 nm、130nm,甚至100nm仍可使用。 300mm要适合多代技术的需求,它面临IC生产中的新工艺、新材料和新结构的挑战。对逻辑IC来说,它涉及铜布线、低介电常数(k<3)和超低介电常数(k<2.6)介质,低电阻率接触材料,低电阻率栅材料,薄栅和高k介质,浅源/漏延伸区和抬高源/漏结构。对DRAM来说,它涉及储存电容的新材料,如五氧化二钽(Ta2o5)、钡锶钛(BST)和铂锆钛(PZT)等,新的电极材料如铂、氮化钛等,垂直叠层和高深/宽比沟槽电容,高深/宽比(>10:1)接触等。此外,还有大面积刻蚀中的CD控制和选择性,反应室中的微粒控制和金属沾污,CMP 的质量与成本,193nm曝光的精度、均匀性和效率,高精度、高效率的检测等。 为了推进300mm的大生产,设备厂商在几年前就着手解决这方面问题,如Canon于1995年着手300mm曝光机,推出了EX3L和i5L步进机,于1997-1998年提供日本半导体超前边缘技术(SELETE)集团使用,ASML公司的300mm 步进扫描曝光机使用193nm波长,型号为FPA-5000,也于1999年提供给SELETE 使用。现在Canon的第三代300mm曝光机的混合匹配曝光能力已达到<110nm。在刻蚀方面如英国Trikon公司采用的螺旋波等离子体(MORI)源,在电磁场作用下控制等离子体和改善均匀性,它能在300mm片内对氧化物介质均匀地刻25nm通孔,深/宽比达30:1。目前300mm片径生产180nm、150nm、130nm的IC设备都已进入生产线,100nm的也开始提供。 300mm生产有约500道工序,以年产12.5万片计算,片子约有500万次交接,任何一次失效,将对工厂流水生产带来极大影响。300mm片盒放25片重8公斤,价格15000美元,为减轻劳动、安全、无磨损、无沾污的传送,现在普遍采用正面打开的统一标准箱(FOUP),FOUP的传送采取计算机控制下的悬挂式空中传送(UMHS),它既节省了超净间面积,还可用于临时存放片子,具有可操作性和可变换性的特点。 西门子公司和Motorola公司于1998年率先在德国德勒斯登建立300mm引导线,使用180nm技术生产存储器,月产1500片。根据美国“固态杂志”今年5月
最短路径的并行算法综述
最短路径的并行算法综述 SA02011105 陈艾 (aiai@https://www.360docs.net/doc/638372280.html,) 摘要:最短路径问题是图论中的一个典范问题,它被应用于众多领域。最短路径问题可以分成两类:单源最短路径、所有顶点对间的最短路径。本文对最短路径的并行算法进行综述,并介绍目前最短路径问题中的一个热点问题K条最短路径。 关键字:最短路径,单源最短路径,所有顶点对间的最短路径,K条最短路径 A Summary on Parallel Algorthms for Shortest Path Problems SA02011105 CHEN Ai Abstract:The shortest path problem plays an important role in graph theory .It is applied to numerous area . It is composed of two parts: single source shortest paths and all pairs shortest paths. This paper presents a summary on parallel algorithms for the shortest path problems including introducing a hot issue k shortest paths in shortest path problems at present. Keywords:Shortest paths,Single source shortest paths,All pairs shortest paths,K shortest paths 1. 引言 二十世纪中后期,随着计算机的出现和发展,图论的研究得到广泛重视,最短路径问题是图论中的一个典范问题,它已经被应用于众多领域。最短路径问题最直接的应用当数在地理信息领域,如:GIS网络分析、城市规划、电子导航等。在交通咨询方面,寻找交通路网中两个城市间最短的行车路线就是最短路径问题的一个典型的例子。在网络通信领域,信息包传递的路径选择问题也与最短路径问题息息相关。举个例子,OPSF开放路由选择协议,每 1 SA02011105 陈艾
光刻技术及其应用的状况和未来发展
光刻技术及其应用的状况和未来发展 光刻技术及其应用的状况和未来发展1 引言 光刻技术作为半导体及其相关产业发展和进步的关键技术之一,一方面在过去的几十年中发挥了重大作用;另一方面,随着光刻技术在应用中技术问题的增多、用户对应用本身需求的提高和光刻技术进步滞后于其他技术的进步凸显等等,寻找解决技术障碍的新方案、寻找COO更加低的技术和找到下一俩代可行的技术路径,去支持产业的进步也显得非常紧迫,备受人们的关注。就像ITRS对未来技术路径的修订一样,上世纪基本上3~5年修正一次,而进入本世纪后,基本上每年都有修正和新的版本出现,这充分说明了光刻技术的重要性和对产业进步的影响。如图1所示,是基于2005年ITRS对未来几种可能光刻技术方案的预测。也正是基于这一点,新一轮技术和市场的竞争正在如火如荼的展开,大量的研发和开发资金投入到了这场竞赛中。因此,正确把握光刻技术发展的主流十分重要,不仅可以节省时间和金钱,同时可以缩短和用户使用之间的周期、缩短开发投入的回报时间,因为光刻技术开发的投入比较庞大。 2 光刻技术的纷争及其应用状况 众说周知,电子产业发展的主流和不可阻挡的趋势是"轻、薄、短、小",这给光刻技术提出的技术方向是不断提高其分辨率,即提高可以完成转印图形或者加工图形的最小间距或者宽度,以满足产业发展的需求;另一方面,光刻工艺在整个工艺过程中的多次性使得光刻技术的稳定性、可靠性和工艺成品率对产品的质量、良率和成本有着重要的影响,这也要求光刻技术在满足技术需求的前提下,具有较低的COO和COC。因此,光刻技术的纷争主要是厂家可以提供给用户什么样分辨率和产能的设备及其相关的技术。 以Photons为光源的光刻技术 2.1 以Photons为光源的光刻技术 在光刻技术的研究和开发中,以光子为基础的光刻技术种类很多,但产业化前景较好的主要是紫外(UV)光刻技术、深紫外(DUV)光刻技术、极紫外(EUV)光刻技术和X射线(X-ray)光刻技术。不但取得了很大成就,而且是目前产业中使用最多的技术,特别是前两种技术,在半导体工业的进步中,起到了重要作用。 紫外光刻技术是以高压和超高压汞(Hg)或者汞-氙(Hg-Xe)弧灯在近紫外(350~450nm)的3条光强很强的光谱(g、h、i线)线,特别是波长为365nm的i线为光源,配合使用像离轴照明技术(OAI)、移相掩模技术(PSM)、光学接近矫正技术(OPC)等等,可为0.35~0.25μm的大生产提供成熟的技术支持和设备保障,在目前任何一家FAB中,此类设备和技术会占整个光刻技术至少50%的份额;同时,还覆盖了低端和特殊领域对光刻技术的要求。光学系统的结构方面,有全反射式(Catoptrics)投影光学系统、折反射式(Catadioptrics)系统和折射式(Dioptrics)系统等,如图2所示。主要供应商是众所周知的ASML、NIKON、CANON、ULTRATECH 和SUSS MICROTECH等等。系统的类型方面,ASML以提供前工程的l:4步进扫描系统为主,分辨率覆盖0.5~0.25μm:NIKON以提供前工程的1:5步进重复系统和LCD的1:1步进重复系统为主,分辨率覆盖0.8~0.35μm和2~0.8μm;CANON以提供前工程的1:4步进重复系统和LCD的1:1步进重复系统为主,分辨率也覆盖0.8~0.35μm和1~0.8μm;ULTRATECH以提供低端前工程的1:5步进重复系统和特殊用途(先进封装/MEMS/,薄膜磁头等等)的1:1步进重复系统为主;而SUSS MICTOTECH以提供低端前工程的l:1接触/接近式系统和特殊用途(先进封装/MEMS/HDI等等)的1:1接触/接近式系为主。另外,在这个领域的系统供应商还有USHlO、TAMARACK和EV Group等。 深紫外技术
MEMS技术发展综述
MEMS技术发展综述 施奕帆04209720 (东南大学信息科学与工程学院) 摘要:对于MEMS技术进行简要的介绍,了解其诞生与发展,所涉及的学科领域,目前的研究成果以及在生活、军事、医学等方面的应用。目前MEMS在我国的发展已取得一定成果,在21世纪可以有更大的突破,其未来在材料、工艺、微器件、微系统方面也具有巨大的发展空间。 关键词:MEMS、传感器、微制造技术 一、MEMS简介 微机电系统(micro electro mechanical system,MEMS)是在微电子技术基础上发展起来的多学科交叉的前沿研究领域,其起源可以追溯到20世纪50~60年代,最初贝尔实验室发现了硅和锗的压阻效应,从而导致了硅基MEMS传感器的诞生和发展。在随后的几十年里,MEMS得到了飞速发展,1987年美国加州大学伯克利分校研制出转子直径为60~120/μm的硅微型静电电机;1987~1988年,一系列关于微机械和微动力学的学术会议召开,所以20世纪80年代后期微机电系统一词就渐渐成为一个世界性的学术用语,MEMS技术的研究开发也成为一个热点,引起了世界各国科学界、产业界和政府部门的高度重视,经过几十年的发展,它已
成为世界瞩目的重大科技领域之一。 二、MEMS涉及领域及作用 MEMS技术涉及电子工程、机械工程、材料工程、物理学、化学以及生物医学等学科。MEMS开辟了一个新的技术领域,它的研究不仅涉及元件和系统的设计、材料、制造、测试、控制、集成、能源以及与外界的联接等许多方面,还涉及微电子学、微机构学、微动力学、微流体学、微热力学、微摩擦学、微光学、材料学、物理学、化学、生物学等基础理论 三、MEMS器件的分类及功能 目前,MEMS技术几乎可以应用于所有的行业领域,而它与不同的技术结合,往往会产生一种新型的MEMS器件。根据目前的研究情况,除了进行信号处理的集成电路部件以外,MEMS内部包含的单元主要有以下几大类: (1)微传感器: 主要包括机械类、磁学类、热学类、化学类、生物学类等。其主要功能是检测应变、加速度、速度、角速度(陀螺)、压力、流量、气体成分、湿度、pH值和离子浓度等数值,可应用于汽车、航天和石油勘探等行业。
蒙特卡罗方法并行计算
Monte Carlo Methods in Parallel Computing Chuanyi Ding ding@https://www.360docs.net/doc/638372280.html, Eric Haskin haskin@https://www.360docs.net/doc/638372280.html, Copyright by UNM/ARC November 1995 Outline What Is Monte Carlo? Example 1 - Monte Carlo Integration To Estimate Pi Example 2 - Monte Carlo solutions of Poisson's Equation Example 3 - Monte Carlo Estimates of Thermodynamic Properties General Remarks on Parallel Monte Carlo What is Monte Carlo? ? A powerful method that can be applied to otherwise intractable problems ? A game of chance devised so that the outcome from a large number of plays is the value of the quantity sought ?On computers random number generators let us play the game ?The game of chance can be a direct analog of the process being studied or artificial ?Different games can often be devised to solve the same problem ?The art of Monte Carlo is in devising a suitably efficient game.
基于GPU并行计算的图像二值化研究【文献综述】
文献综述 计算机科学与技术 基于GPU并行计算的图像二值化研究 引言: 图像是当今社会运用的越来越多的元素之一,不过是动画还是静态的图片都是图像的动静呈现,所以对图像的处理也就越来越得到人们的关注。图像重要性,图像处理就是在图像中得到可靠的信息。而图像的二值化处理也是当今正盛行的一种图像的处理方法,它把图像原始化,使得数据更加简单的表现。 本毕业设计是GPU与二值化的并行运算,这无疑就是一种加速算法,也就是讲在二值化处理本来就跟快的基础上,能够更快的读取图像中的信息,得到我们想要的数据。而现在最常用的一种加速算法就是CUDA算法,他的并行运算可以使得二值化运算提高几十倍,在图像处理中是一个很庞大的数据。CUDA的并行运算在处理小图像时并不能很明显的突出速度,但是当遇到有大量的图像需要处理,而且图像又很大的情况下,这种并行运算可以节省很多时间。 1图像处理简介 1.1图像处理的概念 图像处理一般指数字图像处理。数字图像是指用数字摄像机、扫描仪等设备经过采样和数字化得到的一个大的二维数组,该数组的元素称为像素,其值为一整数,称为灰度值。图像处理技术的主要内容包括图像压缩,增强和复原,匹配、描述和识别3个部分。 常见的处理有图像数字化、图像编码、图像增强、图像复原、图像分割和图像分析等。图像处理一般指数字图像处理。虽然某些处理也可以用光学方法或模拟技术实现,但它们远不及数字图像处理那样灵活和方便,因而数字图像处理成为图像处理的主要方面。 1.2 图像二值化技术的简介 首先,图像的二值化有利于图像的进一步处理,使图像变得简单,而且数据量减小,能凸显出感兴趣的目标的轮廓。其次,要进行二值图像的处理与分析,首先要把灰度图像二值化,得到二值化图像。所有灰度大于或等于阀值的像素被判定为属于特定物体,其灰度值为255表示,否则这些像素点被排除在物体区域以外,灰度值为0,
惯性导航文献综述报告
一、引言 惯性技术是惯性制导、惯性导航与惯性测量等技术的统称。惯性技术已应用于军用与民用的众多技术领域中,应用于宇宙飞船、火箭、导弹、飞机、舰船等各种运载器上。在各类导航系统(例如无线电导航、天文导航等)中,惯性导航系统被认为是最有发展前途的一种导航系统。惯性导航系统依照惯性原理,利用惯性元件(加速度计和陀螺仪)来测量载体本身的加速度和角速度,经一系列运算后得到载体的导航参数,从而达到对载体导航定位的目的。惯性导航是一种自主式的导航方法,它既不需要向外界发送信号,也不需要从外界接收信号,所以, 它具有隐蔽性好,工作不受气象条件制约和外界干扰等优点,从而广泛地应用于军用和民用的众多领域中。 随着现代数学、现代控制理论与计算机技术的发展,在平台惯导系统的基础上又发展出了捷联惯导系统。捷联系统是将惯性元件(陀螺和加速度计)直接安装在载体上,直接承受载体角运动,不再需要稳定平台和常平架系统的惯性导航系统。捷联管道系统使用数学平台而非物理平台,简化了平台框架和相连的伺服装置,因而消除了平台稳定过程中的误差,简化了硬件,提高了可靠性和可维护性,降低了成本,体积小、重量轻。 在捷联惯导系统中,用加速度计代替陀螺仪测量运动载体的角速度,称为无陀螺捷联惯导系统(The Gyroscope Free Strapdown Inertial Navigation System,简称GFSINS)。GFSINS舍弃了陀螺,所以能够避开由于陀螺的抗震性差、恢复时间长、动态范围小等缺陷所引起的一系列难以解决的关键技术问题。目前无陀螺捷联惯导系统给的研究已经引起了国内外很多专家学者的重视。无陀螺捷联惯导系统成本低,可靠性高,功率低,寿命长,反应速度快,适用于角加速度大、角速度动态范围大、冲击大的载体的惯性导航,也适合一些较短程飞行器的惯性制导,还可以与其它导航装置组成组合导航系统。 无陀螺捷联惯导系统虽然具有多种突出的优点,但也有美中不足之处。与传统的惯导系统相比,无陀螺捷联惯导系统的载体角速度是从加速度计输出的比力信号中解算出的,且各轴角速度信号互相耦合,因此,目前广泛应用的六加速度计配置方案和九加速度计配置方案都采用了方便解耦的配置,一般选择角加速度作为解算对象,角速度为辅助或不用。而由角加速度到角速度需要一次积分,到姿态需要两次积分,造成角速度计算值和导航参数的误差随时间增长不断积累。此外,加速度计精度和加速度计的安装精度也对无陀螺惯导系统的精度有所制约。 随着加工技术及数字计算机的发展、高精度加速度计的不断问世、滤波技术、组合导航技术的发展,无陀螺捷联惯导系统的研究具有重要意义和广阔的应用前景。本文后续内容中就对无陀螺捷联惯导系统的研究动态和发展前景进行了介绍。 二、国内外研究动态 惯性测量通常利用加速度计敏感线加速度,用陀螺仪敏感角速度来确定载体的姿态。惯性测量系统应用于炮射制导弹药时,炮弹减旋后出炮口的转速仍然很高,比如155mm炮弹的减旋后转速仍达15r/s~20r/s。发射时,炮弹在火药压力下做高加速旋转运动,速度在数毫秒内达到数百m/s,炮弹所受轴向加速度可达几千到几十万个m/s2。这样恶劣的环境对陀螺和加速度计的性能有很高要求:动
光刻技术及其应用的现状及展望
光刻技术及其应用的现状与展望
1 引言 光刻技术作为半导体及其相关产业发展和进步的关键技术之一,一方面在过去的几十年中发挥了重大作用;另一方面,随着光刻技术在应用术问题的增多、用户对应用本身需求的提高和光刻技术进步滞后于其他技术的进步凸显等等,寻找解决技术障碍的新方案、寻找COO更加低的技术和找到下一俩代可行的技术路径,去支持产业的进步也显得非常紧迫,备受人们的关注。就像ITRS对未来技术路径的修订一样,上世纪基本上3~5年修正一次,而进入本世纪后,基本上每年都有修正和新的版本出现,这充分说明了光刻技术的重要性和对产业进步的影响。2005年ITRS对未来几种可能光刻技术方案进行预测。也正是基于这一点,新一轮技术和市场的竞争正在如火如荼的展开,大量的研发和开发资金投入到了这场竞赛中。因此,正确把握光刻技术发展的主流十分重要,不仅可以节省时间和金钱,同时可以缩短和用户使用之间的周期、缩短开发投入的回报时间,因为光刻技术开发的投入比较庞大。 2 光刻技术的现状及其应用状况
众说周知,电子产业发展的主流和不可阻挡的趋势是“轻、薄、短、小”,这给光刻技术提出的技术方向是不断提高其分辨率,即提高可以完成转印图形或者加工图形的最小间距或者宽度,以满足产业发展的需求;另一方面,光刻工艺在整个工艺过程中的多次性使得光刻技术的稳定性、可靠性和工艺成品率对产品的质量、良率和成本有着重要的影响,这也要求光刻技术在满足技术需求的前提下,具有较低的COO和COC。因此,光刻技术的纷争主要是厂家可以提供给用户什么样分辨率和产能的设备及其相关的技术。 2.1 以Photons为光源的光刻技术 在光刻技术的研究和开发中,以光子为基础的光刻技术种类很多,但产业化前景较好的主要是紫外(UV)光刻技术、深紫外(DUV)光刻技术、极紫外(EUV)光刻技术和X射线(X-ray)光刻技术。不但取得了很大成就,而且是目前产业中使用最多的技术,特别是前两种技术,在半导体工业的进步中,起到了重要作用。 紫外光刻技术是以高压和超高压汞(Hg)或者汞-氙(Hg-Xe)弧灯在近紫外(350~450nm)的3条光强很强的光谱(g、h、i线)线,特别是波长为365nm的i线为光源,配合使用像离轴照明技术(OAI)、移相掩模技术(PSM)、光学接近矫正技术(OPC)等等,可为0.35~0.25μm的大生产提供成熟的技术支持和设备保障,在目前任何一家FAB中,此类设备和技术会占整个光刻技术至少50%的份额;同时,还覆盖了低端和特殊领域对光刻技术的要求。光学系统的结构方面,有全反射式(Catoptrics)投影光学系统、折反射式(Catadioptrics)系统和折射式(Dioptrics)系统等。主要供应商是众所周知的ASML、NIKON、CANON、ULTRATECH和SUSS MICROTECH等等。系统的类型方面,ASML以提供前工
微电子封装技术综述论文资料
微电子封装技术综述论文 摘要:我国正处在微电子工业蓬勃发展的时代,对微电子系统封装材料及封装技术的研究也方兴未艾。本文主要介绍了微电子封装技术的发展过程和趋势,同时介绍了不同种类的封装技术,也做了对微电子封装技术发展前景的展望和构想。 关键字:微电子封装封装技术发展趋势展望 一封装技术的发展过程 近四十年中,封装技术日新月异,先后经历了3次重大技术发展。 IC封装的引线和安装类型有很多种,按封装安装到电路板上的方式可分为通孔插入式TH 和表面安装式SM,或按引线在封装上的具体排列分为成列四边引出或面阵排列。微电子封装的发展历程可分为3个阶段: 第1阶段,上世纪70年代以插装型封装为主。70年代末期发展起来的双列直插封装技术DIP,可应用于模塑料,模压陶瓷和层压陶瓷封装技术中,可以用于IO数从8~64的器件。这类封装所使用的印刷线路板PWB成本很高,与DIP相比,面阵列封装,如针栅阵列PGA,可以增加TH类封装的引线数,同时显著减小PWB的面积。PGA系列可以应用于层压的塑料和陶瓷两类技术,其引线可超过1000。值得注意的是DIP和PGA等TH封装由于引线节距的限制无法实现高密度封装。 第2阶段,上世纪80年代早期引入了表面安装焊接技术,SM封装,比较成熟的类型有模塑封装的小外形,SO和PLCC型封装,模压陶瓷中的CERQUAD层压陶瓷中的无引线式载体LLCC和有引线片式载体LDCC,PLCC,CERQUAD,LLCC和LDCC都是四周排列类封装。其引线排列在封装的所有四边,由于保持所有引线共面性难度的限制PLCC的最大等效引脚数为124。为满足更多引出端数和更高密度的需求,出现了一种新的封装系列,即封装四边都带翼型引线的四边引线扁平封装QFP 与DIP,相比QFP的封装尺寸大大减小且QFP具有操作方便,可靠性高,适合用SMT表面安装技术在PCB上安装布线,封装外形尺寸小,寄生参数减小适合高频应用。Intel公司的CPU,如Intel80386就采用的PQFP。 第3阶段,上世纪90年代,随着集成技术的进步,设备的改进和深亚微米技术的使用,LSI,VLSI,ULSI相继出现,对集成电路封装要求更加严格,IO引脚数急剧增加,功耗也随之增大。因此,集成电路封装从四边引线型向平面阵列型发展,出现了球栅阵列封装BGA,并很快成为主流产品。90年代后期,新的封装形式不断涌现并获得应用,相继又开发出了各种封装体积更小的芯片尺寸封装CSP。与时,多芯片组件MCM发展迅速,MCM是将多个半导体集成电路元件以裸芯片的状态搭载在不同类型的布线基板上,经过整体封装而构成的具有多芯片的电子组件。封装技术的发展越来越趋向于小型化,低功耗,高密度,典型的主流技术就是BGA技术和CSP技术。BGA技术有很多种形式如陶瓷封装BGA,CBGA塑料封装,BGA PBGA以及Micro BGA。BGA与PQFP相比,BGA引线短,因此热噪声和热阻抗很小,散热好。耦合的电噪声小,同时BGA封装面积更小,引脚数量更多,且BGA封装更适于大规模组装生产,组装生产合格率大大提高。随着对高IO引出端数和高性能封装需求的增长,工业上已经转向用BGA球栅阵列封装代替QFP。 随着封装技术的发展及进步,我国科研院所从事电子封装技术研究是与电子元器件的研制同时起步的,随着电子元器件技术的发展,电子封装技术同步发展。特别是集成电路技术的发展,促进了电子封装技术日新月异的变化。目前,全国从事封装技术研究的科研院所有33家,其中信息产业部系统16家,其他系统17家。从事封装研究的从业人员1890余人,其中技术人员900余人,主要从事:陶瓷外壳封装、塑料外壳封装、金属外壳封装、金属-
分布式与并行计算报告
并行计算技术及其应用简介 XX (XXX,XX,XXX) 摘要:并行计算是实现高性能计算的主要技术手段。在本文中从并行计算的发展历程开始介绍,总结了并行计算在发展过程中所面临的问题以及其发展历程中出现的重要技术。通过分析在当前比较常用的实现并行计算的框架和技术,来对并行计算的现状进行阐述。常用的并行架构分为SMP(多处理系统)、NUMA (非统一内存存储)、MPP(巨型并行处理)以及集群。涉及并行计算的编程模型有MPI、PVM、OpenMP、TBB及Cilk++等。并结合当前研究比较多的云计算和大数据来探讨并行计算的应用。最后通过MPI编程模型,进行了并行编程的简单实验。 关键词:并行计算;框架;编写模型;应用;实验 A Succinct Survey about Parallel Computing Technology and It’s Application Abstract:Parallel computing is the main technology to implement high performance computing. This paper starts from the history of the development of Parallel Computing. It summarizes the problems faced in the development of parallel computing and the important technologies in the course of its development. Through the analysis of framework and technology commonly used in parallel computing currently,to explain the current situation of parallel computing.Framework commonly used in parallel are SMP(multi processing system),NUMA(non uniform memory storage),MPP(massively parallel processing) and cluster.The programming models of parallel computing are MPI, PVM, OpenMP, TBB and Cilk++, etc.Explored the application of parallel computing combined with cloud computing and big data which are very popular in current research.Finally ,through the MPI programming model,a simple experiment of parallel programming is carried out. Key words:parallel computing; framework; programming model; application; experiment 1引言 近年来多核处理器的快速发展,使得当前软件技术面临巨大的挑战。单纯的提高单机性能,已经不能满足软件发展的需求,特别是在处理一些大的计算问题上,单机性能越发显得不足。在最近AlphaGo与李世石的围棋大战中,AlphaGo就使用了分布式并行计算技术,才能获得强大的搜索计算能力。并行计算正是在这种背景下,应运而生。并行计算或称平行计算时相对于串行计算来说的。它是一种一次可执行多个指令的算法,目的是提高计算速度,及通过扩大问题求解规模,解决大型而复杂的计算问题。可分为时间上的并行和空间上的并行。时间上的并行就是指流水线技术,而空间上的并行则是指用多个处理器并发的执行计算。其中空间上的并行,也是本文主要的关注点。 并行计算(Parallel Computing)是指同时使用多种计算资源解决计算问题的过程,是提高计算机系统计算速度和处理能力的一种有效手段。它的基本思想是用多个处理器来协同求解同一问题,即将被求解的问题分解成若干个部分,各部分均由一个独立的处理机来并行计算。并行计算系统既可以是专门设计的,含有多个处理器的超级计算机,也可以是以某种方式互联的若干台的独立计算机构成的集群。通过并行计算集群完成数据的处理,再将处理的结果返回给用户。 目前常用的并行计算技术中,有调用系统函数启动多线程以及利用多种并行编程语言开发并行程序,常用的并行模型有MPI、PVM、OpenMP、TBB、Cilk++等。利用这些并行技术可以充分利用多核资源适应目前快速发展的社会需求。并行技术不仅要提高并行效率,也要在一定程度上减轻软件开发人员负担,如近年来的TBB、Cilk++并行模型就在一定程度上减少了开发难度,提高了开发效率,使得并行软件开发人员把更多精力专注于如何提高算法本身效率,而非把时间和精力放在如何去并行一个算法。
惯性导航系统发展应用现状
惯性导航系统发展应用现状 测绘10-2班张智远07103094 摘要:阐述了惯性导航技术的核心技术构成(陀螺定向),总结了惯性导航的发展概况,并列举出陀螺仪的发展历程及发展方向。同时,概括了惯性技术的应用领域及当前应用情况。最后指出,随着新型惯性器件的涌现和完善,以惯性导航为基础的组合导航系统将成为未来导航系统的主要发展方向。 关键词:惯性导航陀螺仪惯性导航技术惯性导航系统 惯性导航(Inertial Navigation)是20 世纪中期发展起来的完自主式的导航技术。通过惯性测量组件(IMU)测量载体相对惯性空间的角速率和加速度信息,利用牛顿运动定律自动推算载体的瞬时速度和位置信息,具有不依赖外界信息、不向外界辐射能量、不受干扰、隐蔽性好的特点,且惯导系统能连续地提供载体的全部导航、制导参数(位置、线速度、角速度、姿态角)。惯性导航技术,包括平台式惯导系统和捷联惯导系统。平台式惯性导航系统将陀螺通过平台稳定回路控制平台跟踪导航坐标系在惯性空间的角速度。捷联惯性导航系统利用相对导航坐标系角速度计算姿态矩阵,把雷体坐标系轴向加速度信息转换到导航坐标系轴向并进行导航计算。惯性导航系统通常由惯性测量装置、计算机、控制显示器等组成。惯性测量装置包括加速度计和陀螺仪,又称惯性导航组合。3个自由度陀螺仪用来测量飞行器的三个转动运动;3个加速度计用来测量飞行器的3个平移运动的加速度。计算机根据测得的加速度信号计算出飞行器的速度和位置数据。控制显示器显示各种导航参数。 陀螺仪是惯性系统的主要元件。陀螺仪通常是指安装在万向支架中高速旋转的转子,转子同时可绕垂直于自转轴的一根轴或两根轴进动,前者称单自由度陀螺仪,后者称二自由度陀螺仪。陀螺仪具有定轴性和进动性,利用这些特性制成了敏感角速度的速率陀螺和敏感角偏差的位置陀螺。由于光学、MEMS 等技术被引入于陀螺仪的研制,现在习惯上把能够完成陀螺功能的装置统称为陀螺。陀螺仪种类多种多样,按陀螺转子主轴所具有的进动自由度数目可分为二自由度陀螺仪和单自由度陀螺仪;按支承系统可分为滚珠轴承支承陀螺,液浮、气浮与磁浮陀螺,挠性陀螺(动力调谐式挠性陀螺仪),静电陀螺;按物理原理分为利用高速旋转体物理特性工作的转子式陀螺,和利用其他物理原理工作的半球谐振陀螺、微机械陀螺、环形激光陀螺和光纤陀螺等。 由于陀螺仪是惯性导航的核心部件,因此,可以按各种类型陀螺出现的先后、理论的建立和新型传感器制造技术的出现,将惯性技术的发展划分为四代,但是惯性技术发展的各阶段之间并无明显界线。 第一代惯性技术指1930年以前的惯性技术。自1687年牛顿三大定律的建立,并成为惯性导航的理论基础;到l852年,傅科(Leon Foucault)提出陀螺的定义、原理及应用设想;再到1908年由安修茨(Hermann Anschütz—Kaempfe)研制出世界上第一台摆式陀螺罗经,以及1910年的舒勒(Max Schuler)调谐原理;第一代惯性技术奠定了整个惯性导航发展的基础。 第二代惯性技术开始于上世纪40年代火箭发展的初期,其研究内容从惯性仪表技术发展扩大到惯性导航系统的应用。首先是惯性技术在德国V-II火箭上的第一次成功应用。到50年代中后期,0.5n mile/h的单自由度液浮陀螺平台惯导系统研制并应用成功。1968年,漂移约为0.005°/h的G6B4型动压陀螺研制成功。这一时期,还出现了另一种惯性传感