ABS轮速传感器及其信号处理
A BS 轮速传感器及其信号处理
张集乐,鲁植雄
(南京农业大学工学院,江苏南京210031)
T he Wheel Speed Sensor of ABS and It s Signal Processing
ZHANG Ji -le,LU Zhi -xiong
(College o f Eng ineering of N anjing A g ricult ur al U niv ersity ,N anjing 210031,China)
摘要:分析了汽车防抱死制动系统电磁感应式轮速传感器的工作原理及其信号特征,在对轮速信号检测及其特性分析的基础上,设计了由低通滤波电路和迟滞电压比较器构成的信号处理电路,并在Multisim 8.0环境下进行仿真研究,结果表明电路工作稳定可靠、抗干扰性强.
关键词:防抱死制动系统;轮速传感器;低通滤波电路;迟滞电压比较器
中图分类号:U 463.52
文献标识码:A
文章编号:1001-2257(2007)12-0048-03收稿日期:2007-07-19
Abstract:The w orking principle of m ag netic e lectr ic speed sensor and its sig nal characteristic in anti-lock breaking sy stem have been studied in this paper.Based on the ex periments for the pro p erty of w heel speed sensor,the r equirement fo r the
circuit desig ned to process the signal fr om w heel
speed sensor has been put forw ard,w hich co nsists of low pass filter as w ell as lagg ing com parator.The corresponding sim ulations under the Multisim 8.0enviro nm ent and experiments show that the
circuit w as reliable and could minimize the effect o f electr omagnetic interfer ence.
Key words:anti-lo ck braking sy stem ;w heel speed sensor;low -pass filter circuit;lag ging com parato r
0 引言
ABS 作为车辆主动性安全技术,在车辆上的应用得到了普遍推广.其基本的控制原理是ABS 控制
单元ECU 根据相关传感器的电信号,对制动车轮的滑移情况进行计算和判断,然后输出控制信号,通过制动压力调节器控制车轮制动器的制动力,以使车轮不被抱死[1]
.其中,轮速传感器将车轮的轮速信号输送给ECU ,用以计算车轮的滑移率和参考车速等,是ABS 控制器进行控制的主要依据.
1 轮速传感器及其信号特性
1.1 电磁感应式轮速传感器工作原理[
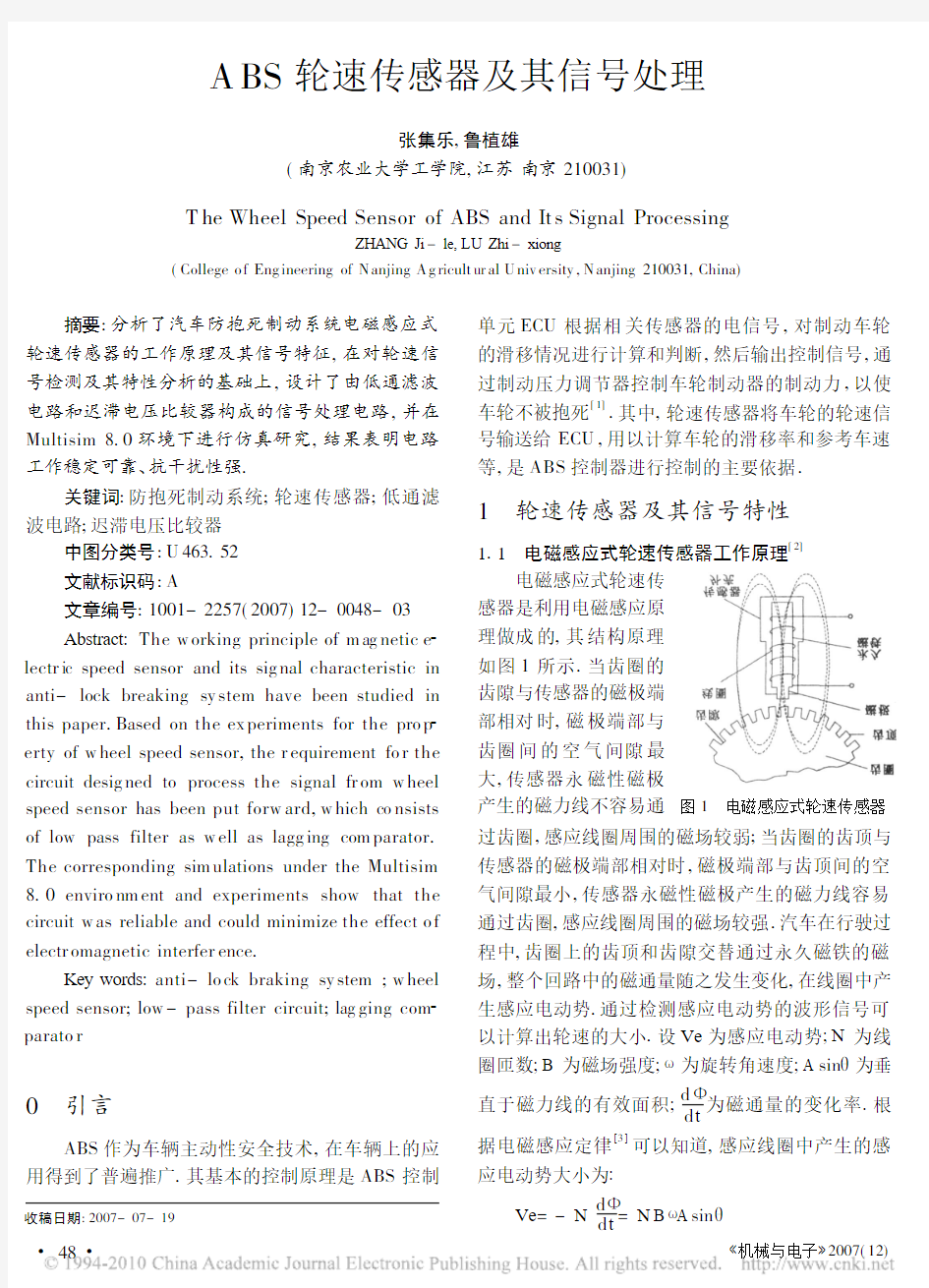
2] 图1 电磁感应式轮速传感器 电磁感应式轮速传感器是利用电磁感应原理做成的,其结构原理如图1所示.当齿圈的齿隙与传感器的磁极端部相对时,磁极端部与齿圈间的空气间隙最
大,传感器永磁性磁极产生的磁力线不容易通过齿圈,感应线圈周围的磁场较弱;当齿圈的齿顶与传感器的磁极端部相对时,磁极端部与齿顶间的空气间隙最小,传感器永磁性磁极产生的磁力线容易通过齿圈,感应线圈周围的磁场较强.汽车在行驶过程中,齿圈上的齿顶和齿隙交替通过永久磁铁的磁场,整个回路中的磁通量随之发生变化,在线圈中产生感应电动势.通过检测感应电动势的波形信号可以计算出轮速的大小.设Ve 为感应电动势;N 为线圈匝数;B 为磁场强度; 为旋转角速度;A sin 为垂
直于磁力线的有效面积;d
d t
为磁通量的变化率.根据电磁感应定律[3]
可以知道,感应线圈中产生的感
应电动势大小为:
Ve =-N d
d t =N B A sin
48 机械与电子 2007(12)
1.2 轮速信号的检测
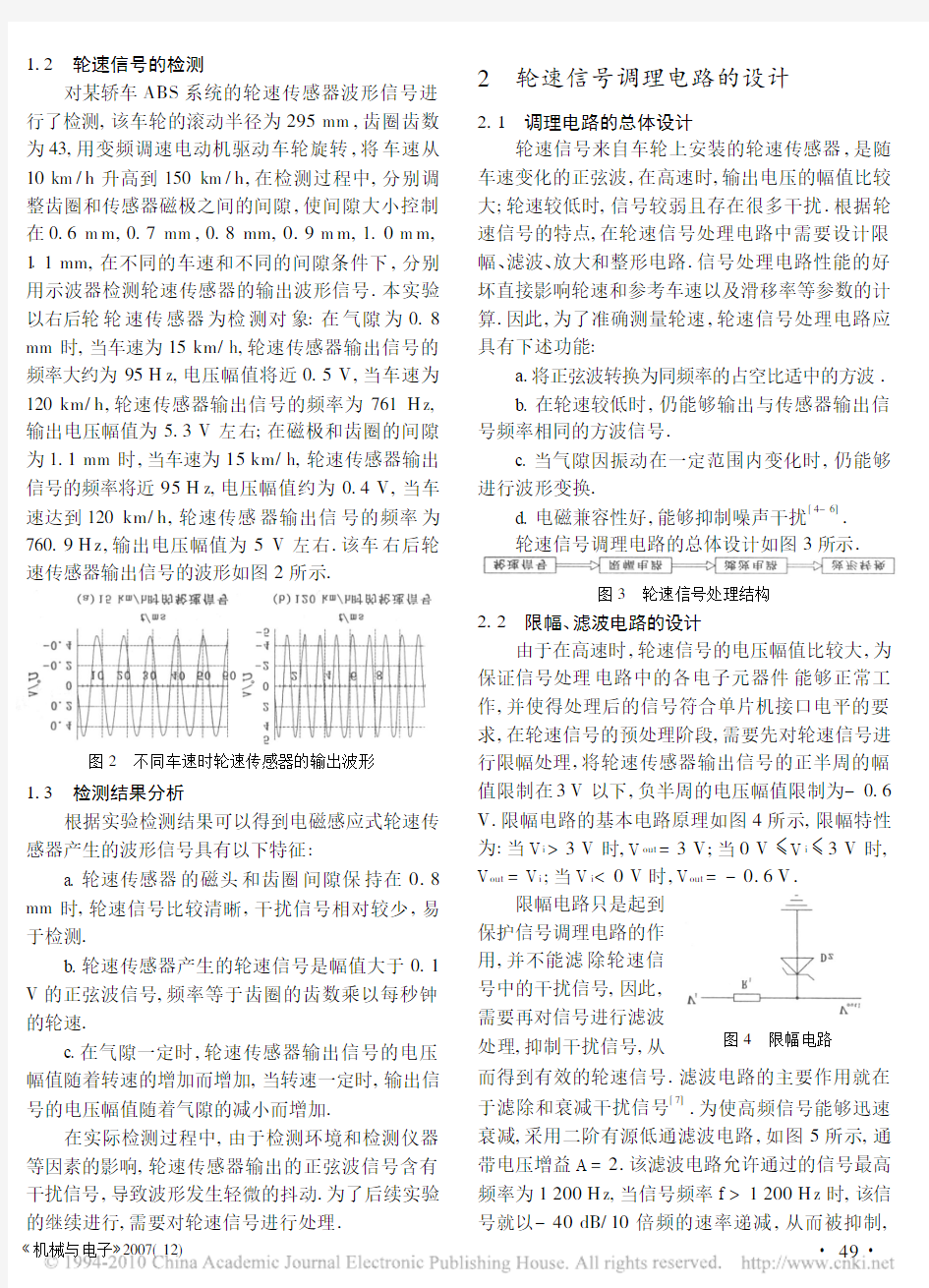
对某轿车ABS 系统的轮速传感器波形信号进行了检测,该车轮的滚动半径为295mm ,齿圈齿数为43,用变频调速电动机驱动车轮旋转,将车速从10km /h 升高到150km /h,在检测过程中,分别调整齿圈和传感器磁极之间的间隙,使间隙大小控制在0.6m m,0.7mm ,0.8mm,0.9m m,1.0m m,1 1mm,在不同的车速和不同的间隙条件下,分别用示波器检测轮速传感器的输出波形信号.本实验以右后轮轮速传感器为检测对象:在气隙为0.8mm 时,当车速为15km/h,轮速传感器输出信号的频率大约为95H z,电压幅值将近0.5V,当车速为120km/h,轮速传感器输出信号的频率为761H z,输出电压幅值为5.3V 左右;在磁极和齿圈的间隙为1.1mm 时,当车速为15km/h,轮速传感器输出信号的频率将近95H z,电压幅值约为0.4V,当车速达到120km/h,轮速传感器输出信号的频率为760.9H z,输出电压幅值为5V 左右.该车右后轮速传感器输出信号的波形如图2所示
.
图2 不同车速时轮速传感器的输出波形
1.3 检测结果分析
根据实验检测结果可以得到电磁感应式轮速传感器产生的波形信号具有以下特征:
a.轮速传感器的磁头和齿圈间隙保持在0.8mm 时,轮速信号比较清晰,干扰信号相对较少,易于检测.
b.轮速传感器产生的轮速信号是幅值大于0.1V 的正弦波信号,频率等于齿圈的齿数乘以每秒钟的轮速.
c.在气隙一定时,轮速传感器输出信号的电压幅值随着转速的增加而增加,当转速一定时,输出信号的电压幅值随着气隙的减小而增加.
在实际检测过程中,由于检测环境和检测仪器等因素的影响,轮速传感器输出的正弦波信号含有干扰信号,导致波形发生轻微的抖动.为了后续实验的继续进行,需要对轮速信号进行处理.
2 轮速信号调理电路的设计
2.1 调理电路的总体设计
轮速信号来自车轮上安装的轮速传感器,是随车速变化的正弦波,在高速时,输出电压的幅值比较大;轮速较低时,信号较弱且存在很多干扰.根据轮速信号的特点,在轮速信号处理电路中需要设计限幅、滤波、放大和整形电路.信号处理电路性能的好坏直接影响轮速和参考车速以及滑移率等参数的计算.因此,为了准确测量轮速,轮速信号处理电路应具有下述功能:
a.将正弦波转换为同频率的占空比适中的方波.
b.在轮速较低时,仍能够输出与传感器输出信号频率相同的方波信号.
c.当气隙因振动在一定范围内变化时,仍能够进行波形变换.
d.电磁兼容性好,能够抑制噪声干扰[4-6]
.轮速信号调理电路的总体设计如图3所示.
图3 轮速信号处理结构
2.2 限幅、滤波电路的设计
由于在高速时,轮速信号的电压幅值比较大,为保证信号处理电路中的各电子元器件能够正常工作,并使得处理后的信号符合单片机接口电平的要
求,在轮速信号的预处理阶段,需要先对轮速信号进行限幅处理,将轮速传感器输出信号的正半周的幅值限制在3V 以下,负半周的电压幅值限制为-0.6V.限幅电路的基本电路原理如图4所示,限幅特性为:当V i >3V 时,V out =3V;当0V V i 3V 时,V out =V i ;当V i <0V 时,V out =-0.6
V.
图4 限幅电路
限幅电路只是起到保护信号调理电路的作用,并不能滤除轮速信号中的干扰信号,因此,需要再对信号进行滤波处理,抑制干扰信号,从而得到有效的轮速信号.滤波电路的主要作用就在
于滤除和衰减干扰信号
[7]
.为使高频信号能够迅速
衰减,采用二阶有源低通滤波电路,如图5所示,通带电压增益A =2.该滤波电路允许通过的信号最高频率为1200H z,当信号频率f >1200H z 时,该信号就以-40dB/10倍频的速率递减,从而被抑制,
49 机械与电子 2007(12)
当调频电动机驱动车轮以最高时速160km/h 的速度转动时,输出波形信号的频率为1030H z,所以,不同频率的轮速信号通过此滤波电路后可以被保留下来,而干扰信号被滤除
.
图5 二阶有源低通滤波电路
2.3 施密特触发器及波形转换
经限幅和滤波处理后的轮速信号仍然为正弦信号,为计算出轮速的数值,需要把正弦信号转换为同频率的脉冲信号.电压比较器可以实现此功能,单限电压比较器在把正弦波转换为方波的过程中,具有转化方便的特点,但是其抗干扰能力比较差,当输入信号的电压接近参考电压时,干扰信号通常会使输出状态不确定,甚至出现错误[8].因此,为避免输出状态不稳定这一缺陷,设计了迟滞电压比较器,并根据输入信号的特点,取该迟滞电压比较器的参考电压值U ref =0.1V,在M ultisim 8.0环境下对电路的性能进行仿真研究,仿真结果和基本电路分别如图6和图7所示.仿真结果表明,不管轮速在高速还是在低速的情况下,此波形转换电路均可把正弦波转换成同频率的方波,方波的高电平为4.2V,符合单片机接口电平要求,可用于轮速计算
.
图6 波形转换仿真结果
图7 迟滞电压比较器
3 结束语
在分析电磁感应式轮速传感器信号特点的基础上,设计了轮速信号调理电路.采用限幅电路保证输
出信号的电压幅值符合单片机接口的电压要求,借助二阶低通滤波电路实现滤除干扰信号,保留有效的轮速信号,最后采用施密特触发器以实现波形转换.仿真结果表明,轮速信号经过该电路调理后可以用于计算轮速,只要对产生的同频率的方波通过单片机计数和定时计算出信号频率,然后根据轮速与频率和半径的关系就可以计算出轮速的大小.参考文献:
[1] 李东江.现代汽车电子控制技术[M ].北京:科学技术
文献出版社,1998.
[2] 麻友良.汽车电器与电子控制系统[M ].北京:机械工
业出版社,2006.
[3] 徐科军.传感器与检测技术[M ].北京:电子工业出版
社,2004.
[4] 陆文昌,毛务本.汽车防抱死制动系统轮速信号处理
[J].江苏大学学报,2002,23(4):36-41.
[5] 李红岩,侯媛彬,王 秀.基于微处理器的ABS 轮速信
号采集处理系统的实现[J].计算机测量与控制,2006,14(1):131-133.
[6] 刘国福,等.基于SP ICE 的ABS 轮速信号处理电路设
计[J].汽车电器,2003,(3):6-8.
[7] 谭博学,等.集成电路原理及应用[M ].北京:电子工业
出版社,2006.
[8] 荆西经.模拟电子电路实验技术[M ].西安:第四军医
大学出版社,2004.
作者简介:张集乐 (1981-),男,山东郯城人,硕士研究生,
研究方向为车辆电子控制技术;鲁植雄 (1962-),男,湖北武穴人,教授,博士研究生导师,研究方向为车辆电子控制技术、路面-车辆系统.
50 机械与电子 2007(12)
传感器与信号处理电路习题答案
第1章 传感器与检测技术基础 1.某线性位移测量仪,当被测位移由4.5mm 变到5.0mm 时,位移测量仪的输出电压由3.5V 减至 2.5V ,求该仪器的灵敏度。 解:该仪器的灵敏度为 25 .40.55.35.2-=--=S V/mm 2.某测温系统由以下四个环节组成,各自的灵敏度如下: 铂电阻温度传感器: 0.45Ω/℃ 电桥: 0.02V/Ω 放大器: 100(放大倍数) 笔式记录仪: 0.2cm/V 求:(1)测温系统的总灵敏度; (2)记录仪笔尖位移4cm 时,所对应的温度变化值。 解: (1)测温系统的总灵敏度为 18.02.010002.045.0=???=S cm/℃ (2)记录仪笔尖位移4cm 时,所对应的温度变化值为 22.2218 .04==t ℃ 6.有三台测温仪表,量程均为0~800℃,精度等级分别为2.5级、2.0级和1.5级,现要测量500℃的温度,要求相对误差不超过2.5%,选那台仪表合理? 解:2.5级时的最大绝对误差值为20℃,测量500℃时的相对误差为4%;2.0级时的最大绝对误差值为16℃,测量500℃时的相对误差为3.2%;1.5级时的最大绝对误差值为12℃,测量500℃时的相对误差为2.4%。因此,应该选用1.5级的测温仪器。 10.试分析电压输出型直流电桥的输入与输出关系。 答:如图所示,电桥各臂的电阻分别为R 1、 R 2、 R 3、R 4。U 为电桥的直流电源电压。当四臂电阻R 1=R 2=R 3=R 4=R 时,称为等臂电桥;当R 1=R 2=R ,R 3=R 4=R ’(R ≠R ’)时,称为输出对称电桥;当R 1=R 4=R ,R 2=R 3 =R ’(R ≠R ’)时,称为电源对称电桥。 D 直流电桥电路 当电桥输出端接有放大器时,由于放大器的输入阻抗很高,所以可以认为电桥的负载电阻为无穷大,这时电桥
传感器与信号处理
《传感器与检测技术》试题 一、填空:(20分) 1,测量系统的静态特性指标主要有线性度、迟滞、重复性、分辨力、稳定性、温度稳定性、各种抗干扰稳定性等。(2分) 2.霍尔元件灵敏度的物理意义是表示在单位磁感应强度相单位控制电流时的霍尔电势大小。 3、光电传感器的理论基础是光电效应。通常把光线照射到物体表面后产生的光电效应分为三类。第一类是利用在光线作用下光电子逸出物体表面的外光电效应,这类元件有光电管、光电倍增管;第二类是利用在光线作用下使材料内部电阻率改变的内光电 效应,这类元件有光敏电阻;第三类是利用在光线作用下使物体内部产生一定方向电动势的光生伏特效应,这类元件有光电池、光电仪表。 4.热电偶所产生的热电势是两种导体的接触电势和单一导体的温差电势组成的,其表达式为Eab (T ,To )=T B A T T B A 0d )(N N ln )T T (e k 0σ-σ?+-。在热电偶温度补偿中补偿导线法(即冷端延长线法)是在连接导线和热电偶之间,接入延长线,它的作用是将热电偶的参考端移至离热源较远并且环境温度较稳定的地方,以减小冷端温度变化的影响。 5.压磁式传感器的工作原理是:某些铁磁物质在外界机械力作用下,其内部产生机械压力,从而引起极化现象,这种现象称为正压电效应。相反,某些铁磁物质在外界磁场的作用下会产生机械变形,这种现象称为负压电效应。(2分) 6. 变气隙式自感传感器,当街铁移动靠近铁芯时,铁芯上的线圈电感量(①增加②减小③不变)(2分) 7. 仪表的精度等级是用仪表的(① 相对误差 ② 绝对误差 ③ 引用误差)来表示的(2分) 8. 电容传感器的输入被测量与输出被测量间的关系,除(① 变面积型 ② 变极距型 ③ 变介电常数型)外是线性的。(2分) 9. 电位器传器的(线性),假定电位器全长为Xmax, 其总电阻为Rmax ,它的滑臂间的阻值可以用Rx = (① Xmax/x Rmax,②x/Xmax Rmax ,③ Xmax/XRmax ④X/XmaxRmax )来计算。 10、变面积式自感传感器,当衔铁移动使磁路中空气缝隙的面积增大时,铁心上线圈的电感量(①增大,②减小,③不变)。 11、在平行极板电容传感器的输入被测量与输出电容值之间的关系中,(①变面积型,②变极距型,③变介电常数型)是线性的关系。 12、在变压器式传感器中,原方和副方互感M 的大小与原方线圈的匝数成(①正比,②反比,③不成比例),与副方线圈的匝数成(①正比,②反比,③不成比例),与回路中磁阻成(①正比,②反比,③不成比例)。 13、传感器是能感受规定的被测量并按照一定规律转换成可用输出信号的器件或装置,传感器通常由直接响应于被测量的敏感元件 和产生可用信号输出的转换元件以及相应的信号调节转换电路组成。 14、热电偶所产生的热电势是由两种导体的接触电势和单一导体的温差电势组成。 15、电阻应变片式传感器按制造材料可分为① _金属_ 材料和②____半导体__体材料。它们在受到外力作用时电阻发生变化,其中①的电阻变化主要是由 _电阻应变效应 形成的,而②的电阻变化主要是由 温度效应造成的。 半导体 材料传感器的灵敏度较大。 16、在变压器式传感器中,原方和副方互感M 的大小与 绕组匝数 成正比,与 穿过线圈的磁通_成正比,与磁回路中 磁阻成反比。 17.磁电式传感器是利用导体和磁场发生相对运动而在导体两端 产生感应电势的。而霍尔式传感器为霍尔元件在磁场中有电磁效应(霍尔效应)而输出电势的。霍尔式传感器可用来测量电流,磁场,位移,压力。(6分) 18.测量系统的静态特性指标通常用输入量与输出量的对应关系来表征(5分) 简答题 1 简述热电偶的工作原理。(6分)
几种常见传感器总结
几种常见传感器总结 1、红外对管: 红外对管是根据红外辐射式传感器原理制作的一种红外对射式传感器。与一般红外传感器一样,红外对管也由三部分构成:光学系统(发射管)、探测器(接收管)、信号调理及输出电路。红外探测器是利用红外辐射与物质相互作用所呈现的物理效应来探测红外辐射的。在此接收管通过对发射管所发出的红外线做出反应实现,实现信号的采集,再通过后续信号处理电路完成信号的采集和输出。 2、霍尔传感器: 霍尔传感器是基于霍尔效应的一种传感器。霍尔效应是指置于磁场中的静止载流导体, 当它的电流方向与磁场方向不一致时, 载流导体上平行于电流和磁场方向上的两个面之间产生电动势的现象。该电势称霍尔电势。霍尔传感器是利用霍尔效应实现磁电转换的一种传感器,它具有灵敏度高,线性度好,稳定性高、体积小和耐高温等特点。对测速装置的要求是分辨能力强、高精度和尽可能短的检测时间。目前市场上的霍尔传感器都是集成了外围的测量电路输出的是数字信号,即当传感器检测到磁场时将输出高低电平信号。传感器主要包括两部分,一为检测部分的霍尔元件,一为提供磁场的磁钢。霍尔电流传感器反应速度一般在7微妙,根本不用考虑单片机循环判断的时间. 3、光电开关: 光电开关是一种利用感光元件对变化的入射光加以接收, 并进行光电转换, 同时加以某种形式的放大和控制, 从而获得最终的控制输出“开”、“关”信号的器件。上图为典型的光电开关结构图。是一种反射式的光电开关,它的发光元件和接收元件的光轴在同一平面且以某一角度相交,交点一般即为待测物所在处。当有物体经过时, 接收元件将接收到从物体表面反射的光, 没有物体时则接收不到。透射式的光电开关, 它的发光元件和接收元件的光轴是重合的。当不透明的物体位于或经过它们之间时, 会阻断光路, 使接收元件接收不到来自发光元件的光, 这样起到检测作用。光电开关的特点是小型、高速、非接触, 而且与TTL、MOS等电路容易结合。此类传感器目前也多为开关量传感器,输出的为1,0开关量信号,可以和单片机直接连接使用。光电开关广泛应用于工业控制、自动化包装线及安全装置中作光控制和光探测装置。可在自控系统中用作物体检测,产品计数, 料位检测,尺寸控制,安全报警及计算机输入接口等用途。 4、超声波传感器: 利用超声波在超声场中的物理特性和各种效应而研制的装置可称为超声波换能器、探测器或传感器。超声波探头按其工作原理可分为压电式、磁致伸缩式、电磁式等, 而以压电式最为常用。压电式超声波探头常用的材料是压电晶体和压电陶瓷, 这种传感器统称为压电式超声波探头。它是利用压电材料的压电效应来工作的: 逆压电效应将高频电振动转换成高频机械振动, 从而产生超声波, 可作为发射探头; 而利用正压电效应, 将超声振动波转换成电信号, 可用为接收探头。超声波探头主要由压电晶片组成,既可以发射超声波,也可以接收超声
浅谈电磁感应式轮速传感器在汽车防抱死制动系统(ABS)中的应用与仿真方法
本科毕业设计(论文) 题目浅谈电磁感应式轮速传感器在汽车防抱 死制动系统(ABS)中的应用与仿真方法 学院机械工程学院 学生姓名072512202陈新文072512221 徐炜 072512211 钱之豪072512214 沈佳慧专业汽车服务工程(汽车试验与检测技术) 年级大三班级汽检122 导师叶飞职称讲师 论文提交日期2015-06-17
浅谈电磁感应式轮速传感器在汽车防抱死制动系统(ABS)中的 应用与仿真方法 摘要 电磁感应式轮速传感器可以对汽车轮速信号进行测量,用于制动、发动机及变速箱等众多系统控制,是汽车最关键的部件之一。为了对汽车制动防抱死系统(ABS)及早有效的开发验证,需要对电磁感应式轮速传感器进行仿真模拟。文章针对最常用的电磁感应式电磁感应式轮速传感器进行测试与分析,通过设计信号调理电路,成功搭建了 ABS 硬件在环仿真平台,既简化了汽车开发阶段的验证与测试,又节省了开发成本。 关键词:电磁感应式电磁感应式轮速传感器 ABS 在环仿真
On the Electromagnetic Induction Type Wheel Speed Sensors in Automotive Anti-lock Braking System (ABS) Application and Simulation Abstract Electromagnetic induction type wheel speed sensors for automotive wheel speed signals are measured for a number of system control brake, engine and transmission, it is one of the most critical components of the car. To automobile anti-lock braking system (ABS) early and effective development of verification, the need for wheel speed sensor simulation. Articles for the most common wheel speed sensor electromagnetic induction test and analysis through design signal conditioning circuit, successfully built ABS HIL simulation platform, not only simplifies the validation and testing phase of vehicle development, but also saves the cost of development. Key Words:Electromagnetic induction type wheel speed sensor; ABS; In the simulation
各种传感器的分类、比较和应用
传感器的定义传感器是一种能把物理量或化学量转变成便于利用的电信号的器件。国际电工委员会(IEC:International Electrotechnical Committee)的定义为:“传感器是测量系统中的一种前置部件,它将输入变量转换成可供测量的信号”。按照Gopel等的说法是:“传感器是包括承载体和电路连接的敏感元件”,而“传感器系统则是组合有某种信息处理(模拟或数字)能力的系统”。传感器是传感系统的一个组成部分,它是被测量信号输入的第一道关口。 传感器把某种形式的能量转换成另一种形式的能量。有两类:有源的和无源的。有源传感器能将一种能量形式直接转变成另一种,不需要外接的能源或激励源。 无源传感器不能直接转换能量形式,但它能控制从另一输入端输入的能量或激励能,传感器承担将某个对象或过程的特定特性转换成数量的工作。其“对象”可以是固体、液体或气体,而它们的状态可以是静态的,也可以是动态(即过程)的。对象特性被转换量化后可以通过多种方式检测。对象的特性可以是物理性质的,也可以是化学性质的。按照其工作原理,它将对象特性或状态参数转换成可测定的电学量,然后将此电信号分离出来,送入传感器系统加以评测或标示。 传感器原理结构在一段特制的弹性轴上粘贴上专用的测扭应片并组成变桥,即为基础扭矩传感器;在轴上固定着:(1)能源环形变压器的次级线圈,(2)信号环形变压器初级线圈,(3)轴上印刷电路板,电路板上包含整流稳定电源、仪表放大电路、V/F变换电路及信号输出电路。在传感器的外壳上固定着: (1)激磁电路,(2)能源环形变压器的初级线圈(输入),(3) 信号环形变压器次级线圈(输出),(4)信号处理电路 工作过程 向传感器提供±15V电源,激磁电路中的晶体振荡器产生400Hz的方波,经过TDA2030功率放大器即产生交流激磁功率电源,通过能源环形变压器T1从静止的初级线圈传递至旋转的次级线圈,得到的交流电源通过轴上的整流滤波电路得到±5V的直流电源,该电源做运算放大器AD822的工作电源;由基准电源AD589与双运放AD822组成的高精度稳压电源产生±4.5V的精密直流电源,该电源既作为电桥电源,又作为放大器及V/F转换器的工作电源。当弹性轴受扭时,应变桥检测得到的mV级的应变信号通过仪表放大器AD620放大成 1.5v±1v的强信号,再通过V/F转换器LM131变换成频率信号,通过信号环形变压器T2 从旋转的初级线圈传递至静止次级线圈,再经过外壳上的信号处理电路滤波、整形即可得到与弹性轴承受的扭矩成正比的频率信号,该信号为TTL电平,既可提供给专用二次仪表或频率计显示也可直接送计算机处理。由于该旋转变压器动--静环之间只有零点几毫米的间隙,加之传感器轴上部分都密封在金属外壳之内,形成有效的屏蔽,因此具有很强的抗干扰能力。 传感器分类倾角传感器 倾角传感器在军事、航天航空、工业自动化、工程机械、铁路机车、消费电子、海洋船舶等领域得到广泛运用。辉格公司为国内用户提供全球最全面、最专业的产品方案和服务。提供超过500种规格的伺服型、电解质型、电容型、电感型、光纤型等原理的倾角传感器。 加速度传感器(线和角加速度)
传感器技术及传感器信号处理
传感器技术及其信号处理方法 第一章传感器概述 1.1 传感器技术基础 传感器(sensor)是一种把物理量转换成电信号的器件。可以说,传感器代表了物理世界与电气设备(如计算机)世界接口的一部分。这种接口的另一部分由把电信号转换成物理量的执行器(actuator)表示。 为什么我们这么关心这个接口?近年来,电子行业拥有了巨大的信息处理能力。其中最明显的例子是个人计算机。此外,价格低廉的微处理器的使用对汽车、微波炉、玩具等嵌入式计算产品的设计产生了重大影响。最近几年,使用微处理器进行功能控制的产品越来越多。在汽车行业,为满足污染限制要求必须利用微处理器的这种信息处理能力。而在其他行业,这种能力又带来了降低产品成本、提高产品性能的优势。 所有这些微处理器都需要输人电压以接收指令和数据、因此,随着廉价微处理器的出现,传感器在各种产品中的应用也越来越多。此外,由于传感器输出的是电信号,因而传感器也就能够按电子没备的描述方式来插述。同电子产品数据手册一样,很多传感器数据手册也都遵照某种格式撰写。然而,目前存在很多种格式,而且传感器规格说明的国际标准还没有制订,这样,传感器系统设
计师就会遇到对同一传感器性能参数存在不同的解释,这常常令人混淆。这种混淆并非由于这些术语的含义无法理解,而是在于传感器界不同的人群习惯于使用不同的术语,认识到这一点至关重要。 1.1.1 传感器数据手册 为了解决上述术语使用的差异向题,有必要首先命绍数据手册的功用,数据手册主要是一份营销文件,用来突出某一传感器的优点,強调其潜在的应用,但是有可能忽视该传感器的不足。很多情况下,传感器是设计用来满足特定用户的特定性能要求的,而数锯手册就集中了该用户最感兴趣的性能参数。这种情况下,传感器制造商和客户就有可能越来越习惯于使用某种约定的传感器性能参数定义,而这种定义却未必通用,这样,这种传感器未来的新用户必须认清这种情形以便恰当地理解这些参数。人们常常遇到不同的定义。此外,大多数传感器数据手册都缺少对特定应用有用的信息。 1.1.2 传感器性能特征定义 下面是一些较重要的传感器性能特征。 1.传递函数 传递函数表示物理输入信号与电瑜出信号之间的函数关系。通常,这种关系以输入输出信号关系图来表示,具体的关系构成了对传感器性能特点的完整描述。对需逐
网络智能化传感技术发展浅析
1、引言 传感器技术、通信技术与计算机技术构成现代信息的三大基础,它们分别完成对被测量的信息提取、信息传输及信息处理,是当代科学技术发展的一个重要标志。随着科学技术的发展,数字化、智能化和网络化已成为时代发展趋势:计算机技术和通信技术结合进而产生了计算机网络技术;计算机技术和传感器技术结合产生了智能传感器技术;将三者融为一体(计算机网络技术与智能传感技术结合)便产生了网络化智能传感技术。网络化智能传感技术已成为人们关注的热点[1],本文仅就网络化智能传感技术的发展现状与发展趋势作简要论述。 2、网络化智能传感技术 网络化智能传感器是以嵌入式微处理器为核心,集成了传感单元、信号处理单元和网络接口单元,使传感器具备自检、自校、自诊断及网络通信功能,从而实现信息的采集、处理和传输真正统一协调的新型智能传感器,原理框图如图1所示。 网络化智能传感器与其它类型传感器相比,具有如下特点: ⑴具有智能传感功能。随着嵌入式技术、集成电路技术和微控制器的引入,使传感器成为硬件和软件的结合体,一方面传感器的功耗降低、体积减小、抗干扰性和可靠性提高,另一方面传感器具有了自识别和自校正功能,同时利用软件技术实现传感器的非线性补偿、零点漂移和温度补偿等; ⑵ 具有网络通信功能。网络接口技术的应用使传感器方便地接入工业控制 网络,为系统的扩充和维护提供了极大的方便。 3、基于现场总线的智能传感技术
现场总线技术是一种集计算机技术、通信技术、集成电路技术及智能传感技术于一身的新兴控制技术,按照国际电工委员会IEC61158的标准定义:“安装在制造和过程区域的现场装置与控制室内的自动控制装置之间的数字式、串行、多点通信的数据总线称为现场总线”。一般认为“现场总线是一种全数字化、双向、多站的通信系统,是用于工业控制的计算机系统工业总线”。 现场总线技术是在仪表智能化和全数字控制系统的需求下产生的。现场总线是连结智能化现场设备和控制室之间全数字式、开放式和双向的通信网络。随着各种智能传感器、变送器和执行器的出现,一种新的工业控制系统体系?D数字化到现场、控制功能到现场、设备管理到现场的现场总线控制系统FCS(Fieldbus Control System)必将取代传统的集散控制系统DCS(Distributed Control System)。基于现场总线的智能传感器如图2所示。 3.1现场总线的本质含义 现场总线不仅是一种通信协议,也不仅是用数字信号传输的仪表代替模拟信号(4~20mA DC)传输的仪表,关键是用新一代的现场总线控制系统FCS代替传统的集散控制系统DCS,实现现场通信网络与控制系统的集成。其本质含义体现在以下六个方面[2]: ⑴全数字化通信 和半数字化的DCS不同,现场总线系统是一个纯数字系统。现场总线是用于过程自动化和制造自动化的现场设备或现场仪表互连的现场数字通信网络,利用数字信号代替模拟信号,其传输抗干扰性强,测量精度高,大大提高了系统的性能。 ⑵现场设备互连 现场设备或现场仪表是指传感器、变送器和执行器等,这些设备通过一对传输线互连。传输线可以使用双绞线、同轴电缆和光纤等。 ⑶互操作性 互操作性的含义来自不同制造厂的现场设备,不仅可以互相通信,而且可以统一组态,构成所需的控制回路,共同实现控制策略。 ⑷分散功能块 FCS废弃了DCS的输入/输出单元和控制站,把DCS控制站的功能块分散地分配给现场仪表,实现了彻底的分散控制。
轮速传感器的原理与检修
轮速传感器的原理与检 修 集团文件版本号:(M928-T898-M248-WU2669-I2896-DQ586-M1988)
轮速传感器的原理与检修 现代汽车的ABS系统中都设置有电磁感应式的轮速传感器,它可以安装在主减速器或变速器中,轮速传感器的组成和工作原理如图所示。它是由永久磁铁、磁极、线圈和齿圈组成。齿圈5在磁场中旋转时,齿圈齿顶和电极之间的间隙就以一定的速度变化,则使磁路中的磁阻发生变化。其结果是使磁通量周期地增减,在线圈1的两端产生正比于磁通量增减速度的感应电压,并将该交流电压信号输送给电子控制器。 轮速传感器的种类及其检测: 1.电磁感应式车速传感器: 电磁感应式车速传感器安装在自动变速器输出轴附近的壳体上,用于检测自动变速器输出轴的转速。电控单元ECU根据车速传感器的信号计算车速,作为换挡控制的依据。车速传感器由永久磁铁和电磁感应线圈组成,它被固定安装在白动变速器输出轴附近的壳体上,输出轴上的停车锁定齿轮为感应转子,当输出轴转动时,停车锁定齿轮的凸齿,不断地靠近或离开车速传感器,使线圈内的磁通量发生变化,从而产生交流电,车速越高,输出轴转速也越高,感应电压脉冲频率也越高,电控组件根据感应电压脉冲的大小计算汽车行驶的速度。用万用表测导通,阻值还有有没有电压信号。 2.霍尔式轮速传感器; 在汽车应用中是十分特殊的,这主要是由于变速器周围空间位置冲突霍尔效应传感器是固体传感器,它们主要应用在曲轴转角和凸轮轴位置上,用于开关点火和燃油喷射电路触发,它还应用在其它需要控制转
动部件的位置和速度控制电脑电路中。霍尔效应传感器或开关,由一个几乎完全闭合的包含永久磁铁和磁极部分的磁路组成,一个软磁铁叶片转子穿过磁铁和磁极间的气隙,在叶片转子上的窗口允许磁场不受影响的穿过并到达霍尔效应传感器,而没有窗口的部分则中断磁场,因此,叶片转子窗口的作用是开关磁场,使霍尔效应象开关一样地打开或关闭,这就是一些汽车厂商将霍尔效应传感器和其它类似电子设备称为霍尔开关的原因,该组件实际上是一个开关设备,而它的关键功能部件是霍尔效应传感器。测试步骤将驱动轮顶起模拟行使状态,也可以将汽车示波测试线加长进行行驶的测试。波形结果当车轮开始转动时,霍尔效应传感器开始产生一连串的信号,脉冲的个数将随着车速增加而增加,与图例相像,这是大约30英里/小时时记录的,车速传感器的脉冲信号频率将随车速的增加而增加,但位置的占空比在任何速度下保持恒定不变。车速传感器越高,在示波器上的波形脉冲也就越多。确认从一个脉冲到另一个脉冲的幅度,频率和形状是一致的,这就是说幅度够大通常等于传感器的供电电压,两脉冲间隔一致,形状一致,且与预期的相同。确定波形的频率与车速同步,并且占空比决无变化,还要观察如下内容:观察波形的一致性,检查波形顶部和底部尖角。观察幅度的一致性:波形高度应相等,因为给传感器的供电电压是不变的。有些实例表明波形底部或顶部有缺口或不规则。这里关键是波形的稳定性不变,若波形对地电位过高,则说明电阻过大或传感器接地不良。观察由行驶性能问题的产生和故障码出现而诱发的波形异常,这样可以确定与顾客反映的故障或行驶性能故障产生的根本原因直接有关信号问题。虽
传感技术与信号处理
浙江工业大学之江学院010/011 学年 第二学期《传感技术与信号处理》期终试卷 (考试类型:闭卷) 班级姓名学号 一、填空( 每空1.5分共45分) 1.通常把频谱中作为信号的频宽,称为1/10法则;对于有跃变的信号,取作为频宽。 2.测试装置的灵敏度愈高,测量范围往往愈________,稳定性愈______。 3.若要信号在传输过程中不失真,测试系统的输出和输入的幅频特性必须满足(表达式)__________________,相频频特性必须满足(表达式)__________________。 4.为了消除应变片的温度误差,可采用的温度补偿措施包括:、、 和。 5. 电感式传感器按工作原理可分为_______________、________________和电涡流式三种。 6.为了提高极距变化式电容传感器的灵敏度,应_______初始间隙。但初始间隙过_______时,一方面使测量范围_______,另一方面容易使_______击穿。 7.压电式传感器测量电路的前置放大器有_________________和_________________两种,_________________作为前置放大器时压电式传感器输出信号与测量导线的距离无关。 8. 光电耦合器是由一个和一个共同封装在一个外壳内组成的复合型转换元件,又称为。 9.光栅传感器中莫尔条纹的一个重要特性是具有位移放大作用。如果两个光栅距相等,即W=0.02mm,其夹角θ=0.1°,则莫尔条纹的宽度B=_____________莫尔条纹的放大倍数K=_____________。 10.热电偶产生热电势必须具备的基本条件是 ____________、____________。 11.霍尔式传感器为______ _______在磁场中有电磁效应(霍尔效应)而输出电势的。霍尔式元件的电路符号图为:_________________。 14.热电动势由两部分电动势组成,一部分是两种导体的________电动势,另一部分是单一导体的______电动势。
第二章PSD传感器与信号处理电路
a 第二章 PSD 传感器与信号处理电路 为了将电机轴的位置信号转换为相应的电信号,本文的传感器使用光电位置敏感器件PSD (Position Sensitive Detector )。 本章介绍PSD 及其信号处理电路的工作原理及选型。 2.1 PSD 传感器的工作原理及选型 传感器是一种以一定的精确度将被测量(如位置、力、加速度等)转换成与之有确定对应关系的、易于精确处理和测量的某种物理量(如电量)的测量部件或装置。 传感器在检测系统中是一个非常重要的环节,其性能直接影响到整个系统的测量精度和灵敏度。如果传感器的误差很大,后面的测量电路、放大器等的精度再高也将难以提高整个系统的精度。所以在系统设计时慎重选择传感器是十分必要的。 光电位置敏感器件PSD (Position Sensitive Detector )是一种对其感光面上入射光斑重心位置敏感的光电器件。即当入射光斑落在器件感光面的不同位置时,PSD 将对应输出不同的电信号。通过对此输出电信号的处理,即可确定入射光斑在PSD 的位置。入射光的强度和尺寸大小对PSD 的位置输出信号均无关。PSD 的位置输出只与入射光的“重心”位置有关。 PSD 可分为一维PSD 和二维PSD 。一维PSD 可以测定光点的一维位置坐标,二维PSD 可测光点的平面位置坐标。由于PSD 是分割型元件,对光斑的形状无严格的要求,光敏面上无象限分隔线,所以对光斑位置可进行连续测量从而获得连续的坐标信号。 实用的一维PSD 为PIN 三层结构,其截面如图2.1.1所示。表面P 层为感光面,两边各有一信号输出电极。底层的公共电极是用来加反偏电压的。当入射光点照射到PSD 光敏面上某一点时,假设产生的总的光生电流为I 0。由于在入射光点到信号电极间存在横向电势,若在两个信号电极上接上负载电阻,光电流将分别流向两个信号电极,从而从信号电极上分别得到光电流I 1和I 2。显然,I 1和I 2之和等于光生电流I 0,而I 1和I 2的分流关系取决于入射光点位置到两个信号电极间的等效电阻R 1和R 2。如果PSD 表面层的电阻是均匀的,则PSD 的等效电路为图2.1.1〔b 〕所示的电路。由于R sh 很大,而C j 很小,故等效电路可简化成图2.1.1 (c) 的形式,其中R 1和R 2的值取决于入射光点的位置。 假设负载电阻R L 阻值相对于R 1和R 2可以忽略,则有: (2.1.1)I I R R L x L x 1221==-+式中,L 为PSD 中点到信号电极的距离,x 为入射光点距PSD 中点的距离。式(2.1.1)表明,两个信号电极的输出光电流之比为入射光点到该电极间距离之比的倒数。将I 0= I 1+I 2与式(2.1.1)联立得:
霍尔效应式轮速传感器
霍尔轮速传感器的工作原理 1引言 霍尔器件是一种磁传感器。用它们可以检测磁场及其变化,可在各种与磁场有关的场合中使用。霍尔器件以霍尔效应为其工作基础。 霍尔器件具有许多优点,它们的结构牢固,体积小,重量轻,寿命长,安装方便,功耗小,频率高(可达1MHZ,耐震动,不怕 灰尘、油污、水汽及盐雾等的污染或腐蚀。 霍尔线性器件的精度高、线性度好;霍尔开关器件无触点、无磨损、输岀波形清晰、无抖动、无回跳、位置重复精度高(可达gm 级)。取用了各种补偿和保护措施的霍尔器件的工作温度范围宽,可达—55C?150C。 按照霍尔器件的功能可将它们分为:霍尔线性器件和霍尔开关器件。前者输岀模拟量,后者输岀数字量。 按被检测的对象的性质可将它们的应用分为:直接应用和间接应用。前者是直接检测岀受检测对象本身的磁场或磁特性,后者是检 测受检对象上人为设置的磁场,用这个磁场来作被检测的信息的载体,通过它,将许多非电、非磁的物理量例如力、力矩、压力、应力、位置、位移、速度、加速度、角度、角速度、转数、转速以及工作状态发生变化的时间等,转变成电量来进行检测和控制。 2霍尔效应和霍尔元件 2.1霍尔效应 如图1所示,在一块通电的半导体薄片上,加上和片子表面垂直的磁场B,在薄片的横向两侧会岀现一个电压,如图1中的VH,这 种现象就是霍尔效应,是由科学家爱德文?霍尔在1879年发现的。VH称为霍尔电压。 (a)霍尔效应和霍尔元件 这种现象的产生,是因为通电半导体片中的载流子在磁场产生的洛仑兹力的作用下,分别向片子横向两侧偏转和积聚,因而形成一 个电场,称作霍尔电场。霍尔电场产生的电场力和洛仑兹力相反,它阻碍载流子继续堆积,直到霍尔电场力和洛仑兹力相等。这时, 片子两侧建立起一个稳定的电压,这就是霍尔电压。 在片子上作四个电极,其中C1、C2间通以工作电流I,C1、C2称为电流电极,C3 C4间取出霍尔电压VH, C3 C4称为敏感电极 将各个电极焊上引线,并将片子用塑料封装起来,就形成了一个完整的霍尔元件(又称霍尔片) ⑴”甲唧中或⑵"严唱注冷,或(3) 在上述(1 )、(2)、(3)式中VH是霍尔电压,p是用来制作霍尔元件的材料的电阻率,卩n 是材料的电子迁移率,RH是霍尔 系数,I、W t分别是霍尔元件的长、宽和厚度,f(I/W)是几何修正因子,是由元件的几何形状和尺寸决定的,I是工作电流,V 是两电流电极间的电压,P是元件耗散的功率。由(1)?(3)式可见,在霍尔元件中,p、RH gn决定于元件所用的材料,I、W t 和f(I/W)决定于元件的设计和工艺,霍尔元件一旦制成,这些参数均为常数。因此,式(1)?(3)就代表了霍尔元件的三种工作方式所得的结果。(1)式表示电流驱动,(2)式表示电压驱动,(3)式可用来评估霍尔片能承受的最大功率。 为了精确地测量磁场,常用恒流源供电,令工作电流恒定,因而,被测磁场的磁感应强度B可用霍尔电压来量度 在一些精密的测量仪表中,还采用恒温箱,将霍尔元件置于其中,令RH保持恒定。
传感器的发展历史
传感器的定义 信息处理技术取得的进展以及微处理器和计算机技术的高速发展,都需要在传感器的开发方面有相应的进展。微处理器现在已经在测量和控制系统中得到了广泛的应用。随着这些系统能力的增强,作为信息采集系统的前端单元,传感器的作用越来越重要。传感器已成为自动化系统和机器人技术中的关键部件,作为系统中的一个结构组成,其重要性变得越来越明显。 最广义地来说,传感器是一种能把物理量或化学量转变成便于利用的电信号的器件。国际电工委员会(IEC:International Electrotechnical Committee)的定义为:“传感器是测量系统中的一种前置部件,它将输入变量转换成可供测量的信号”。按照Gopel等的说法是:“传感器是包括承载体和电路连接的敏感元件”,而“传感器系统则是组合有某种信息处理(模拟或数字)能力的传感器”。传感器是传感器系统的一个组成部分,它是被测量信号输入的第一道关口。 传感器系统的原则框图示于图1-1,进入传感器的信号幅度是很小的,而且混杂有干扰信号和噪声。为了方便随后
的处理过程,首先要将信号整形成具有最佳特性的波形,有时还需要将信号线性化,该工作是由放大器、滤波器以及其他一些模拟电路完成的。在某些情况下,这些电路的一部分是和传感器部件直接相邻的。成形后的信号随后转换成数字信号,并输入到微处理器。 德国和俄罗斯学者认为传感器应是由二部分组成的,即直接感知被测量信号的敏感元件部分和初始处理信号的电路部分。按这种理解,传感器还包含了信号成形器的电路部分。 传感器系统的性能主要取决于传感器,传感器把某种形式的能量转换成另一种形式的能量。有两类传感器:有源的和无源的。有源传感器能将一种能量形式直接转变成另一种,不需要外接的能源或激励源(参阅图1-2(a))。 有源(a)和无源(b)传感器的信号流程 无源传感器不能直接转换能量形式,但它能控制从另一输入端输入的能量或激励能 传感器承担将某个对象或过程的特定特性转换成数量的工作。其“对象”可以是固体、液体或气体,而它们的状态可以
ABS轮速传感器及其信号处理
ABS轮速传感器及其信号处理 车轮防抱死制动系统简称ABS 是基于汽车轮胎与路面之间的附着特性而开发的高技术制动系统。ABS由信号传感器、逻辑控制器和执行调节器组成。其控制目标是:当汽车在应急制动时,使车轮能够获得最佳制动效率,同时又能实现车轮不被抱死、侧滑,使汽车在整个制动过程中保持良好的行驶稳 定性和方向可操作性。 在ABS系统中,几乎都离不开对车轮转动角速度的测定,因为只要有了车轮转动角速度,其它参数(如车轮转动角和加速度)均可通过计算机计算获得。ABS的工作原理就是在汽车制动过程中不断检测车轮速度的变化,按一定的控制方法,通过电磁阀调节轮缸制动压力,以获得最高的纵向附着系数和较高的侧向附着系数,使车轮始终处于较好的制动状态。因此精确检测车轮速度是ABS系统正常工作的先决条件。 1 ABS轮速传感器及特性分析 通常,用来检测车轮转速信号的传感器有磁电式、电涡流式和霍尔元件式。由于磁电式轮速传感器工作可靠,几乎不受温度、灰尘等环境因素影响,所以在ABS系统中得到 广泛应用。 1.1 磁电式轮速传感器的工作原理 磁电式传感器的基本原理是电磁感应原理。根据电磁感应定律,当N匝线圈在均恒 磁场内运动时,设穿过线圈的磁通为φ,则线圈内的感应电势ε与磁通变化率有 如下关系: 若线圈在恒定磁场中作直线运动并切割磁力线时,则线圈两端的感应电势ε为:
式中,N为线圈匝数;B为磁感应强度;L为每匝线圈的平均长度:为线圈相对磁场运动的速度;θ为线圈运动方向与磁场方向的夹角。
若线圈相对磁场作旋转运动并切割磁力线时,则线圈两端的感应电势ε为: 式中,ω为旋转运动的相对角速度;A为每匝线圈的截面积;φ为线圈平面的法线 方向与磁场方向间的夹角。 根据上述基本原理,磁电传感器可以分为两种类型:变磁通式(变磁阻式)和恒定磁通式。由于变磁通式磁电传感器结构简单、牢固、工作可靠、价格便宜,被广泛用于车辆上作为检测车轮转速的轮速传感器。图1为变磁通式磁电传感器的结构原理。其中传感器线圈、磁铁和外壳均固定不动,齿轮安装在被测的旋转体上。 当齿轮与被测的车轮轴一起转动时,齿轮与铁芯之间的气隙随之变化,从而导致气隙磁阻和穿过气隙的主磁通发生变化。结果在感应线圈中感应出交变的电动势,其频率等 于齿轮的齿数Z和车轮轴转速n的乘积,即: f=Zh (4) 感应电动势的幅值与车轮轴的转速和气隙有关,当气隙一定时,转速越大,其幅值越大;当转速一定时,气隙越小,其幅值越大。 1.2 轮速传感器特性试验研究 目前,测量车轮转动速度的一般方法是将变磁阻式磁电传感器安装在车轮总成的非旋转部分上,与随车轮一起转动的由导磁材料制成的齿圈相对。当齿圈随车轮一起转动时,由于齿圈与传感器之间气隙的的交替变化,导致两者间磁阻的变化,从而在传感器内的线 圈上感生出交变的电压信号。
检测传感技术期末复习题参考答案
中国石油大学(北京)远程教育学院 《检测传感技术》期末复习题参考答案 一、填空题(本题共计40分,每一填空计2分) 1. 一个完整的测试系统由激励装置、传感器、信号调理、信号处理、显示记录等五个基本环节组成。 2. 在测试系统中,激励装置的功能是激发隐含的被测信息;传感器的功能是将被测信息转换成其他信息;信号调理环节的功能是将传感器获得的信息转换成更适合于进一步传输和处理的形式;信号处理环节的功能是对来自信号调理环节的信息进行各种处理和分析;显示记录环节的功能是显示或存储测试的结果。 3. 不失真测试即测试系统的输出要真实地反映其输入的变化。为实现不失真测试,系统频率响应需要满足的条件是:幅频特性为常数;相频特性呈线性。对系统瞬态响应的要求是:瞬态误差小;调整时间短。 4. 测试信号的时域特征参数主要有均值、方差和均方值。 5. 信号的均值反映随机信号变化的中心趋势;信号的方差反映随机信号在均值附近的分布状况;信号的均方值反映随机信号的强度。 6. 任何周期信号均可分解为一系列频率比为有理数的简谐信号, 其频谱特性包括离散性、谐波性、收敛性。 7. 频率单一的正弦或余弦信号称为谐波信号。一般周期信号由一系列频率比为有理数的谐波信号叠加而成。 8. 周期信号的频谱特性:离散性即各次谐波分量在频率轴上取离散值;谐波性即各次谐波分量的频率为基频的整倍数;收敛性即各次谐波分量随频率的增加而衰减。 9. 瞬态信号是在有限时间段存在,属于能量有限信号。
10. 瞬态信号的频谱为连续谱,其幅值频谱的量纲为单位频宽上的幅值,即幅值频谱密度函数。 11. 一阶测试系统的基本参数是时间常数。根据对测试系统的基本要求及一阶测试系统的频率响应和单位阶跃响应,一阶测试系统的基本参数的选取原则是时间常数小。 12. 二阶测试系统的基本参数是固有频率和阻尼比。 13. 金属丝应变片依据应变效应工作;半导体应变片依据压阻效应工作。 14. 压力传感器由弹性敏感元件和机电转换元件两部分组成。 15. 测量传感器的动态特性的实验方法包括频率响应法和时间响应法。 16. 基于弹性元件受力产生变形实现检测的力传感器为二阶测试系统。为保证不失真测试,要求传感器的固有频率远大于被测力参数的工作频率。 17. 线性系统的频率保持性即若对线性系统的输入为某一频率的简谐信号,则其稳态响应必是同一频率的简谐信号。 18. 系统频率响应函数测试中,稳态正弦激励方式的依据是线性系统的频率保持性,其特点是测试周期长,其原因在于在每个测试频率处,只有当系统达到稳定状态才能进行测试。 二、解释题(本题共计12分,每小题4分) 1. 物性型传感器 答:依靠敏感元件材料本身物理性质在被测量作用下的变化来实现信号转换的传感器,如应变式、压电式、压阻式传感器。 2. 结构型传感器
传感器与检测技术课后答案
1-2 自动检测系统通常由几个部分组成?其中对传感器的一般要求是什么? 首先由各种传感器将非电被测物理或化学成分参量转化成电参量信号,然后经信号调理,数据采集,信号处理后,进行显示,输出,加上系统所需的交,直流稳压电源和必要的输入设备,便构成了一个完整的自动检测系统。 对传感器通常有如下要求:1,准确性2,稳定性3,灵敏度4其他:如耐腐蚀性,功耗,输出信号形式,体积,售价等。 1-3 试述信号调理和信号处理的主要功能和区别,并说明信号调理单元和信号处理单元通常由哪些部分组成。 信号调理在检测系统中的作用是对传感器输出的微弱信号进行检波,转换,滤波,放大等,以便检测系统后续处理或显示。 信号处理模块是自动检测仪表,检测系统进行数据处理和各种控制的中枢环节,其作用和大脑相类似。 信号调理电路通常包括滤波、放大、线性化等环节。 信号处理模块通常以各种型号的嵌入式微控制器、专用高速处理器(DSP)和大规模可编程集成电路,或直接采用工业控制计算机来构建。 2-1 随机误差,系统误差,粗大误差产生的原因是什么?对测量结果的影响有什么不同?从提高测量准确度看,应如何处理这些误差? 随机误差主要是由于检测仪器或测量过程中某些未知或无法控制的随机因素综合作用的结果。 系统误差产生的原因大体上有:测量所用的仪器本身性能不完善或安装,布置,调整不当;在测量过程中温度,湿度,气压,电磁干扰等环境条件发生变化;测量方法不完善,或者测量所依据的理论本身不完善;操作人员视读方式不当等。 粗大误差一般由外界重大干扰或仪器故障或不正确的操作等引起的。 减小和消除系统误差的方法——1,针对产生系统误差的主要原因采取相应措施 2,采用修正方法减小恒差系统误差 3,采用交叉读书法减小线性系统误差 4,采用半周期法减小周期性系统误差随机误差的处理——可以用数理统计的方法,对其分布范围做出估计,得到 随机影响的不确定度。 粗大误差的处理——拉伊达准则和格拉布斯准则 2-2 工业仪表常用的精度等级是如何定义的?精度等级与测量误差是什么关系? 人为规定:取最大引用误差百分数的分子作为检测仪器(系统)精度等级的标志,即用最大引用误差去掉正负号的数字来表示精度等级。精度等级常用符号G表示。0.1,0.2,0.5,1.0,1.5,2.5,5.0七个等级是我国工业检测仪器(系统)常用精
轮速传感器的原理与检修
精心整理 现代汽车的ABS 系统中都设置有电磁感应式的轮速传感器,它可以安装在主减速器或变速器中,轮速传感器的组成和工作原理如图所示。它是由永久磁铁、磁极、线圈和齿圈组成。齿圈5在磁场中旋转时,齿圈齿顶和电极之间的间隙就以一定的速度变化,则使磁路中的磁阻发生变化。其结果是使磁通量周期地增减,在线圈1的两端产生正比于磁通量增减速度的感应电压,并将该交流电压信号输送给电子控制器。 轮速传感器的种类及其检测: 1.电磁感应式车速传感器: 转速。号。 2.感器,在叶片因此,而它脉这确定有些这样可以确定与顾客反映的故障或行驶性能故障产生的根本原因直接有关信号问题。虽然霍尔效应传感器一般设计能在高至150℃温度下运行,但它们的工作仍然会受到温度的影响,许多霍尔效应传感器在一定的温度下(冷或热)会失效。如果示波器显示波形不正常,检查被干扰的线或连接不良的线束,检查示波器和连线,并确定有关部件转动正常(如:输出轴、传感器转轴等)。当示波器显示故障时,摇动线束,这可以提供进一步判断,以确认霍尔效应传感器是否是故障的根本原因。 3.光电式车速传感器; 光电式车速传感器是固态的光电半导体传感器,它由带孔的转盘两个光导体纤维,一个发光二极管,一个作为光传感器的光电三极管组成。一个以光电三极管为基础的放大器为发动机控制电脑或点火模块提供足够功率的信号,光电三极管和放大器产生数字输出信号(开关脉冲)。发光二极管
精心整理 透过转盘上的孔照到光电三极管上实现光的传递与接收。转盘上间断的孔可以开闭照射到光电三极管上的光源,进而触发光电三极管和放大器,使之像开关一样地打开或关闭输出信号。从示波器上观察光电式车速传感器输出波形的方法与霍尔式车速传感器完全一样,只是光电传感器有一个弱点即它们对油或脏物在光通过转盘传递的干涉十分敏感,所以光电传感器的功能元件通常被设计成密封得十分好,但损坏的分电器或密封垫容器在使用中会使油或赃物进入敏感区域,这会引起行驶性能问题并产生故障码。 光电式车速传感器检测时拔下车速传感器连接器接头用万用表测量传感器两接线端子间电阻。不同车型自动变速器的这种车速传感器感应线圈的电阻值不同,一般为几百欧到几千欧。将车支起,用手转动悬空的驱动车轮,同时用万用表测量车速传感器的两接线端子间有无脉冲感应电压。若万用表指针有摆动,说明传感器有输出脉冲电压,传感器工作正常;否则,说明传感器有故障,应进一步检查传感器转子及感应线圈是否脏污,若脏污,应进行清洁,再进行测试。若传感器仍无脉冲 4. N极与S (MRE 将电压 ,则说明