划分网格教程
GAMBIT 划分泵网格教程
本教程以离心泵为例,详细地介绍了如何应用GAMBIT 进行泵网格划分和质量检查。本文中的离心泵实体采用Pro/E 造型,并导出一个stp 格式副本作为GAMBIT 导入文件。 1、启动GAMBIT 。
双击GAMBIT 快捷方式,弹出下列对话框,首先点击“Browse ”设置GAMBIT 运行目录,以后你的相关文件都将会在这个目录里。建议大家养成设置目录好习惯。设置好目录好,点击“Run ”就启动GAMBIT 了。
GAMBIT 启动后的界面如下图所示。
刘厚林泵网w
w w .p u m p l i u .c
o m
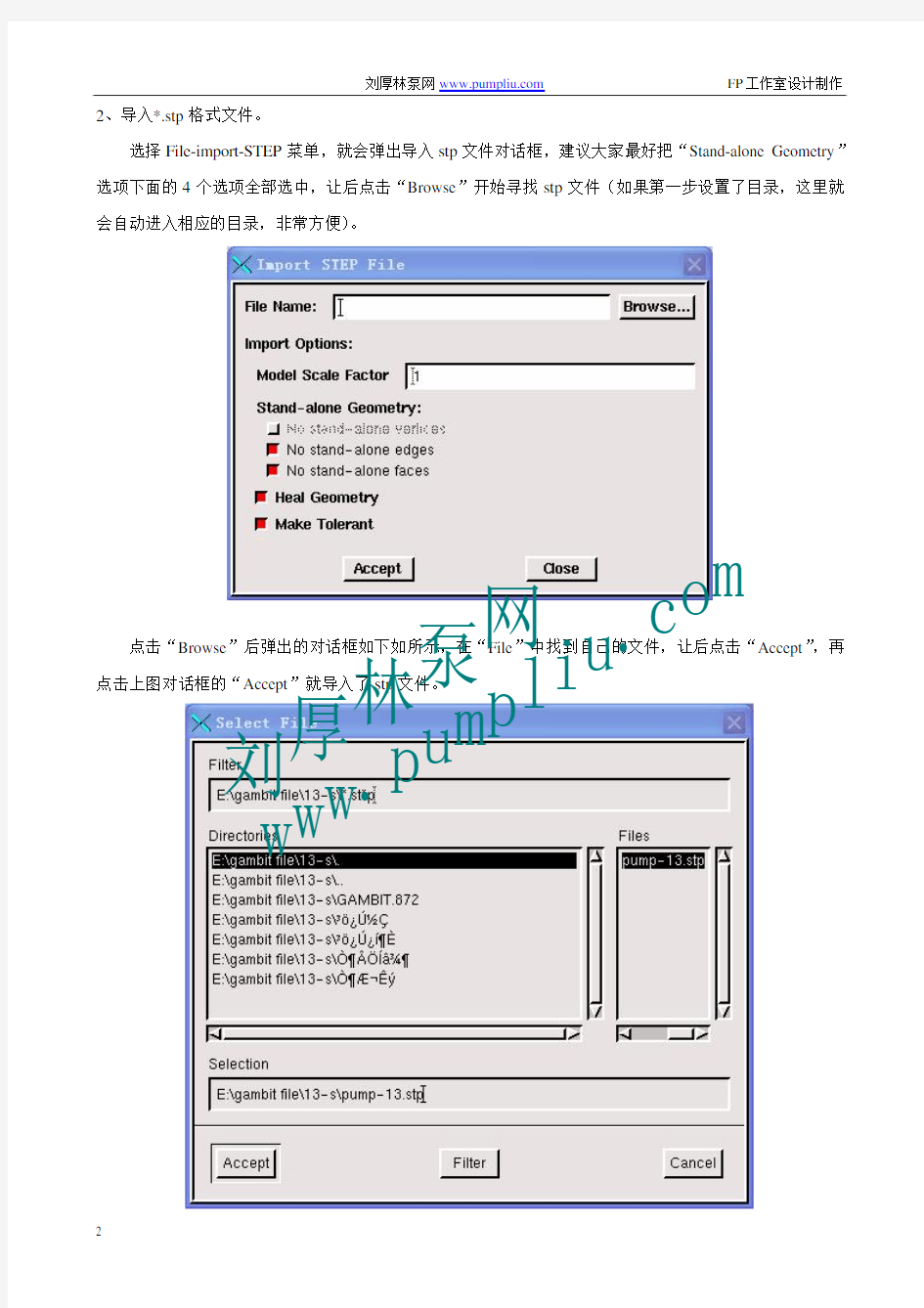
2、导入*.stp 格式文件。
选择File-import-STEP 菜单,就会弹出导入stp 文件对话框,建议大家最好把“Stand-alone Geometry ”选项下面的4个选项全部选中,让后点击“Browse ”开始寻找stp 文件(如果第一步设置了目录,这里就会自动进入相应的目录,非常方便)。
点击“Browse ”后弹出的对话框如下如所示,在“File ”中找到自己的文件,让后点击“Accept ”,再点击上图对话框的“Accept ”就导入了stp 文件。
刘厚林泵网w
w w .p
u m p l i u .c
o m
导入过程中GAMBIT 的菜单栏位置会显示红色进度条,显示导入进度,如下图所示。
导入后GAMBIT 中就会显示相应的实体造型,刚导入后,GAMBIT 显示的是曲线,右键点击上图中右下角的蓝圈所示按钮,然后左键可以选择显示方式,可以切换到实体显示,如下图所示。
2、进行碎面合并操作以提高网格质量。
一般泵三维造型导入GAMBIT 后都会产生很多小面,称之为碎面。这些面如果不合并会对网格质量有非常大的影响。当然也有一些泵造型导入后是基本没有碎面的,那这一步就可以省略了。
一般进行体操作时,如果叶轮和蜗壳都显示会很麻烦,也不容易看清楚每个体上的面。这时点击上图
刘厚林泵网w
w w .p u m p l i u .c
o m
右下角的蓝色按钮,弹出下面左面的对话框,进行隐藏或显示体设置。然后点击“V oluems ”右面的箭头弹出下面右面的对款,选择要隐藏或显示的体,最后点“Close ”回到左面的对话框,接着点击“Visible ”后面的“Off ”或“On ”选项就可以隐藏或显示相应体。
同样,这个对话框还可以进行面、点、边线及网格等的隐藏或显示设置,操作过程与上面类似。
如隐藏蜗壳后,GAMBIT 就只显示叶轮,如下图所示。然后按1、2、3顺序依次点击下面的按钮就会弹出合并面的对话框(第3个按钮先右键点击选择,然后左键点击“Merge Face/virtual ”),位置就在第3个红圈下面。
1
2
3
刘厚林泵网w
w w .p u m p l i u .c
o m
合并面的对话框如下图所示。按“Face ”后面的箭头选择要合并的面,或用“shift 键”加“左键”选取需要的面,让后点击“Apply ”就完成了面合并操作。第
一次操作后可能会出现相应的地方出现“空体”现象,没关系,是显示问题,按第2步中体显示方式再设置一下就好了
3、网格划分。
按1、2、3顺序依次点击下面的按钮就会弹出体网格划分的对话框,位置就在第3个红圈下面。
体网格划分的对话框如下图所示。在“V olumes ”中选择相应的体(选择方法与上述选面方法一样,选中的体会被红色显示,上述面的选择也是一样),然后在“Elements ”和“Type ”选择网格类型,一般对
1
2
3
刘厚林泵网w
w w .p u m p l i u .c
o m
泵而言采用混合网格(TGrid )比较容易划分成功,再在“Interval Size ”前面的框中输入网格间距,最后点击“Apply ”就开始网格划分了。
划分过程如下图所示,在GAMBIT 菜单栏会出现网格划分进度的红色进度条,如下图所示。
刘厚林泵网w
w w .p u m p l i u .c
o m
如网格划分成功
会在上图方框位置内显示,网格划分成功的信息,如下图所示,有33943个网格,
没有高扭曲网格。如有高扭曲网格也会显示出来。
如果网格失败,则会显示相应的错误信息,如下图所示。
4、网格质量检查。
点击上图中右下角的红色圈内的按钮,就会在其上面弹出网格质量检查对话框,其放大图如下图所示。在“Display Type ”选项中选择 “Range ”在“3D Elements ”中把所有类型选中,然后在“Quality Type ”选择要检查网格的那一种属性,一般检查“EquiAngle Skew ”和“EquiSize Skew ”两项就可以了。接着在 “lower ”和“upper ”设置检查区间点击“Apply ”就会显示检查结果,如上图所示。
一般网格划分好后,没有高扭曲单元的话不需要检查。如有高扭曲单元,可以通过网格检查找出其位置让后通过几何操作改善该位置的形状就可以消除高扭曲了。
刘厚林泵网w
w w .p u m p l i u .c
o m
5、边界条件设置。
网格划分结束后,就需要进行边界条件设置了。所谓边界条件设置也就是标识数值计算中所要用到的体和面。首先进行体设置,依次点击下图中的1和2的按钮就会弹出体设置对话框,所有的体都要设置;接着进行边界条件设置,依次点击下图中的1和3按钮就会弹出边界条件设置对话框,一般进出口、交界面以及后处理需要的表面都需要设置一下。
1 3
2
刘厚林泵网w
w w .p u m p l i u .c
o m
体设置对话框如下图左图所示。在“Entity ”中选择相应的体,在“Type ”中选择Fluid ,然后在“Name ”中输入相应的名称,最后点击“Apply ”即可。设置结束后在最上面的框内会显示相关信息。
边界设置对话框如下图右图所示。在“Entity ”中选择相应的面,在“Type ”中选择边界条件的类型(如速度进口),然后在“Name ”中输入相应的名称,最后点击“Apply ”即可。设置结束后在最上面的框内会显示相关信息。
6、保存和导出文件。
在网格划分以及边界条件设置完成以后就可以保存和导出相应的文件。首先选择File-save as (第一次保存选择这个菜单,第二次保存直接File-save 就可以了)菜单保存GAMBIT 自己格式的文件,及后缀为dbs 的文件。
选择File-Export-mesh 菜单导出CFD 计算需要的网格文件。
如果开始设置了目录的话,这连个文件就在设置目录中(在GAMBIT 目录中产生的jou 以及trn 后缀的文件都可以删除,另外一些defualt 开头的文件也可以删除)。
刘厚林泵网w
w w .p
u m p l i u .c
o m
Deform网格划分原则及方法 (1)1
[原]Deform网格划分原则及方法 2009-04-04 23:48 引言:划分网格是建立有限元模型的一个重要环节,它要求考虑的问题较多,需要的工作量较大,所划分的网格形式对计算精度和计算规模将产生直接影响。为建立正确、合理的有限元模型,这里介绍网格划分时的一些基本原则及方法。 关键词: Deform 网格局部细化 一、网格划分的原则 1 网格数量 网格数量的多少将影响计算结果的精度和计算规模的大小。一般来讲,网格数量增加,计算精度会有所提高,但同时计算规模也会增加,所以在确定网格数量时应权衡两个因数综合考虑。图1中的曲线1表示结构中的位移随网格数量收敛的一般曲线,曲线2代表计算时间随网格数量的变化。可以看出,网格较少时增加网格数量可以使计算精度明显提高,而计算时间不会有大的增加。当网格数量增加到一定程度后,再继续增加网格时精度提高甚微,而计算时间却有大幅度增加。所以应注意增加网格的经济性。实际应用时可以比较两种网格划分的计算结果,如果两次计算结果相差较大,可以继续增加网格,相反则停止计算。 图1 位移精度和计算时间随网格数量的变化 在决定网格数量时应考虑分析数据的类型。在静力分析时,如果仅仅是计算结构的变形,网格数量可以少一些。如果需要计算应力,则在精度要求相同的情况下应取相对较多的网格。在热分析中,结构内部的温度梯度不大,不需要大量的内部单元,这时可划分较少的网格。 2 网格疏密 网格疏密是指在结构不同部位采用大小不同的网格,这是为了适应计算数据的分布特点。在计算数据变化梯度较大的部位(如应力集中处),为了较好地反映数据变化规律,需要采用比较密集的网格。而在计算数据变化梯度较小的部位,为减小模型规模,则应划分相对稀疏的网格。这样,整个结构便表现出疏密不同的网格划分形式。图2是中心带圆孔方板的四分之一模型,其网格反映了疏密不同的划分原则。小圆孔附近存在应力集中,采用了比较密的网格。板的四周应力梯度较小,网格分得较稀。其中图b中网格疏密相差更大,它比图a中的网格少48个,但计算出的孔缘最大应力相差1%,而计算时间却减小了36%。由此可见,采用疏密不同的网格划分,既可以保持相当的计算精度,又可使网格数量减小。因此,网格数量应增加到结构的关键部位,在次要部位增加网格是不必要的,也是不经济的。 划分疏密不同的网格主要用于应力分析(包括静应力和动应力),在结温度场计算中采用趋于均匀网格。
网格划分的几种基本处理方法
网格划分的几种基本处理方法 贴体坐标法: 贴体坐标是利用曲线坐标,并使其坐标线与燃烧室外形或复杂计算区域边界重合,这样所有边界点能够用网格点来表示,不需要任何插值。一旦贴体坐标生成通过变换,偏微分方程求解可以不在任意形状的物理平面上,而在矩形或矩形的组合(空间问题求解域为长方体或它们的组合)转换平面上进行。这样计算与燃烧室外形无关,也与在物理平面上网格间隔无关。 而是把边界条件复杂的问题转换成一个边界条件简单的问题;这样不仅可避免因燃烧室外形与坐标网格线不一致带来计算误差,而且还可节省计算时间和内存,使流场计算较准确,同时方便求解,较好地解决了复杂形状流动区域的计算,在工程上比较广泛应用。 区域法: 虽然贴体坐标系可以使坐标线与燃烧室外形相重合,从而解决复杂流动区域计算问题。但有时实际流场是一个复杂的多通道区域,很难用一种网格来模拟,生成单域贴体网格,即使生成了也不能保证网格质量,影响流场数值求解的效果。因此,目前常采用区域法或分区网格,其基本思想是,根据外形特点把复杂的物理域或复杂拓扑结构的网格,分成若干个区域,分别对每个子区域生成拓扑结构简单的网格。由这些子区域组合而成的网格,或结构块网格。对区域进行分区时,若相邻两个子域分离边界是协调对接,称为对接网格;若相邻两子域有相互重叠部分,则此分区网格称为重叠网格。根据实际数值模拟计算的需要,把整个区域(燃烧室)分成几个不同的子区域,并分别生成网格。这样不仅可提高计算精度,而且还可节省计算机内存,提高收敛精度。但是计算时,必须考虑各区域连接边界处耦合以及变量信息及时、准确地传递问题。处理各个区域连接有多种方法,其中一个办法是在求解各变量时各区域可以单独求解若干次而对压力校正方程.设压力校正值在最初迭代时为零,为了保证流量连续各个区域应同时求解,然后对各个速度和压力进行校正。或者采用在两个区域交界处有一个重叠区,两个区域都对重叠区进行计算,重叠区一边区域内的值,要供重叠区另一边区域求解时用。或通过在重叠内建立两个区域坐标对应关系,实现数据在重叠区内及时传递。如果两个区采用网格疏密分布不相同,要求重叠区二边流量相等。区域法能合理解决网格生成问题,已被大量用来计算复杂形状区域流动。 区域分解法: 对于复杂几何形状的实际燃烧装置,为了保证数值求解流场质量,目前常采用区域分解法。该法基本要点是:根据燃烧室形状特点和流场计算需要,把计算区域分成一个主区域和若干个子区域,对各个区域(块)分别建立网格,并对各个区域分别进行数值求解。区域分解原则是尽量使每个子区域边界简便以便于网格建立,各个子区域大小也尽可能相同,使计算负载平衡有利于平行计算。各区域的网格间距数学模型以及计算方法都可以不同,通常在变量变化梯度大的区域,可以布置较细网格,并采用高阶紊流模型和描述复杂反应的紊流燃烧模型,以便更合理模拟实际流场。对于变量变化不太大区域,可采用较疏的网格和较简单的数学模型,这样可节省计算时间。各子区域的解在相邻子区域边界处通过耦合条件来实现光滑,相邻子区域连接重叠网格或对接网格来实现,在各子区域交界处通过插值法提供各子域求解变量的信息传递,满足各子域流场计算要求通量和动量守恒条件以便实现在交界面处各子域流场解的匹配和耦合,从而取得全流场解。 非结构网格法: 上述各方法所生成的网格均属于结构化网格,其共同特点是网格中各节点排列有序,每个节点与邻点之间关系是固定的,在计算区域内网格线和平面保持连续。特别是其中分区结构网格生成方法已积累了较多经验,计算技术也较成熟,目前被广泛用来构造复杂外形区域
网格划分的方法
网格划分的方法 1.矩形网格差分网格的划分方法 划分网格的原则: 1)水域边界的补偿。舍去面积与扩增面积相互抵消。2)边界上的变步长处理。 3)水、岸边界的处理。 4)根据地形条件的自动划分。 5)根据轮廓自动划分。
2.有限元三角网格的划分方法 1)最近点和稳定结构原则。 2)均布结点的网格自动划分。 3)逐渐加密方法。 35 30 25 20 15 10 5 05101520253035
距离(m)距 离 (m) 3. 有限体积网格的划分方法 1) 突变原则。 2) 主要通道边界。 3) 区域逐步加密。
距离(100m) 离距(100m )距离(100m)离距(100m )
4. 边界拟合网格的划分方法 1) 变换函数:在区域内渐变,满足拉普拉斯方程的边值问题。 ),(ηξξξP yy xx =+ ),(ηξηηQ yy xx =+ 2) 导数变化原则。 ?????? ??????=?????? ??????-ηξ1J y x ,???? ??=ηηξξy x y x J 为雅可比矩阵,??? ? ??--=-ηηξξy x y x J J 11, ξηηξy x y x J -= )22(1 222233ηηξηξηηξηξξηηηηηξξηηξξξηξy y x y y y x y y x x y y x y y x y J xx +-+-+-= 同理可得yy ξ,xx η,yy η。 变换方程为 020222=+++-=+++-)()(ηξηηξηξξηξηηξηξξγβαγβαQy Py J y y y Qx Px J x x x 其中2222,,ξξηξξηηηγβαy x y y x x y x +=+=+=。
ANSYS 13.0 Workbench 网格划分及操作案例
第 3章 ANSYS 13.0 Workbench网格划分及操作案例 网格是计算机辅助工程(CAE)模拟过程中不可分割的一部分。网格直接影响到求解精 度、求解收敛性和求解速度。此外,建立网格模型所花费的时间往往是取得 CAE 解决方案所 耗费时间中的一个重要部分。因此,一个越好的自动化网格工具,越能得到好的解决方案。 3.1 ANSYS 13.0 Workbench 网格划分概述 ANSYS 13.0 提供了强大的自动化能力,通过实用智能的默认设置简化一个新几何体的网 格初始化,从而使得网格在第一次使用时就能生成。此外,变化参数可以得到即时更新的网 格。ANSYS 13.0 的网格技术提供了生成网格的灵活性,可以把正确的网格用于正确的地方, 并确保在物理模型上进行精确有效的数值模拟。 网格的节点和单元参与有限元求解,ANSYS 13.0在求解开始时会自动生成默认的网格。 可以通过预览网格,检查有限元模型是否满足要求,细化网格可以使结果更精确,但是会增 加 CPU 计算时间和需要更大的存储空间,因此需要权衡计算成本和细化网格之间的矛盾。在 理想情况下,我们所需要的网格密度是结果随着网格细化而收敛,但要注意:细化网格不能 弥补不准确的假设和错误的输入条件。 ANSYS 13.0 的网格技术通过 ANSYS Workbench的【Mesh】组件实现。作为下一代网格 划分平台, ANSYS 13.0 的网格技术集成 ANSYS 强大的前处理功能, 集成 ICEM CFD、 TGRID、 CFX-MESH、GAMBIT网格划分功能,并计划在 ANSYS 15.0 中完全整合。【Mesh】中可以根 据不同的物理场和求解器生成网格,物理场有流场、结构场和电磁场,流场求解可采用 【Fluent】、【CFX】、【POLYFLOW】,结构场求解可以采用显式动力算法和隐式算法。不同的 物理场对网格的要求不一样,通常流场的网格比结构场要细密得多,因此选择不同的物理场, 也会有不同的网格划分。【Mesh】组件在项目流程图中直接与其他 Workbench分析系统集成。 3.2 ANSYS 13.0 Workbench 网格划分 ANSYS 网格划分不能单独启动,只能在 Workbench 中调用分析系统或【Mesh】组件启 动,如图 3-1 所示。 图3-1 调入分析系统及网格划分组件
网格划分
有限元网格划分 摘要:总结近十年有限元网格划分技术发展状况。首先,研究和分析有限元网格划分的基本原则;其次,对当前典型网格划分方法进行科学地分类,结合实例,系统地分析各种网格划分方法的机理、特点及其适用范围,如映射法、基于栅格法、节点连元法、拓扑分解法、几何分解法和扫描法等;再次,阐述当前网格划分的研究热点,综述六面体网格和曲面网格划分技术;最后,展望有限元网格划分的发展趋势。 关键词:有限元网格划分;映射法;节点连元法;拓扑分解法;几何分解法;扫描法;六面体网格 1 引言 有限元网格划分是进行有限元数值模拟分析至关重要的一步,它直接影响着后续数值计算分析结果的精确性。网格划分涉及单元的形状及其拓扑类型、单元类型、网格生成器的选择、网格的密度、单元的编号以及几何体素。在有限元数值求解中,单元的等效节点力、刚度矩阵、质量矩阵等均用数值积分生成,连续体单元以及壳、板、梁单元的面内均采用高斯(Gauss)积分,而壳、板、梁单元的厚度方向采用辛普生(Simpson)积分。 2 有限元网格划分的基本原则 有限元方法的基本思想是将结构离散化,即对连续体进行离散化,利用简化几何单元来近似逼近连续体,然后根据变形协调条件综合求解。所以有限元网格的划分一方面要考虑对各物体几何形状的准确描述,另一方面也要考虑变形梯度的准确描述。为正确、合理地建立有限元模型,这里介绍划分网格时应考虑的一些基本原则。 2.1 网格数量
网格数量直接影响计算精度和计算时耗,网格数量增加会提高计算精度,但同时计算时耗也会增加。当网格数量较少时增加网格,计算精度可明显提高,但计算时耗不会有明显增加;当网格数量增加到一定程度后,再继续增加网格时精度提高就很小,而计算时耗却大幅度增加。所以在确定网格数量时应权衡这两个因素综合考虑。 2.2 网格密度 为了适应应力等计算数据的分布特点,在结构不同部位需要采用大小不同的网格。在孔的附近有集中应力,因此网格需要加密;周边应力梯度相对较小,网格划分较稀。由此反映了疏密不同的网格划分原则:在计算数据变化梯度较大的部位,为了较好地反映数据变化规律,需要采用比较密集的网格;而在计算数据变化梯度较小的部位,为减小模型规模,网格则应相对稀疏。 2.3 单元阶次 单元阶次与有限元的计算精度有着密切的关联,单元一般具有线性、二次和三次等形式,其中二次和三次形式的单元称为高阶单元。高阶单元的曲线或曲面边界能够更好地逼近结构的曲线和曲面边界,且高次插值函数可更高精度地逼近复杂场函数,所以增加单元阶次可提高计算精度。但增加单元阶次的同时网格的节点数也会随之增加,在网格数量相同的情况下由高阶单元组成的模型规模相对较大,因此在使用时应权衡考虑计算精度和时耗。 2.4 单元形状 网格单元形状的好坏对计算精度有着很大的影响,单元形状太差的网格甚至会中止计算。单元形状评价一般有以下几个指标: (1)单元的边长比、面积比或体积比以正三角形、正四面体、正六面体为参考基准。 (2)扭曲度:单元面内的扭转和面外的翘曲程度。 (3)节点编号:节点编号对于求解过程中总刚矩阵的带宽和波前因数有较大的影响,从而影响计算时耗和存储容量的大小
ICEMCFD网格划分入门基础
WorkBench ICEM CFD 网格划分入门 111AnsysWB里集成了一个非常重要的工具:ICEM CFD。 它是一个建模、划分网格的集成工具,功能非常强大。我也只是蜻蜓点水的用了几次,感觉确实非常棒,以前遇到复杂的模型,用过几个划分网格的工具。但这是我觉得最方便和最具效率的。 网格划分很大程度上影响着后续的仿真分析——相信各位都有所体会。而ICEM CFD特别长于划分六面体网格,相信无论是结构或流体(当然铁别是流体),都会得益于它的威力。 ICEM CFD建模的能力不敢恭维,但划分网格确实有其独到之处。教程开始前,作一个简单的原理介绍,方面没有使用过ICEM CFD的朋友理解主要的任务: 111如下图: 1:白色的物体是我们需要划分网格的,但是它非常不规则。 2:这时候你一定想:怎么这个不规则呢,要是它是一个方方正正的形状多好(例如红色的那个形状)01 111于是有了这样一种思想: 1:对于异型,我们用一种规则形状去描述它。 2:或者说:如果目标形状非常复杂,我们就用很多规则的,简单的形状单元合成在一起,去描述它。 之后,将网格划分的设置,做到规则形状上。 最后,这些规则,通过最初的“描述”关系,自动的“映射”到原先的复杂形状上——问题就得到了解决!!! ICEM CFD正是使用了这种思想。 如下是一个三通管,在ProE里做得
02 在ProE里面直接启动WB 进入WB后,选择如下图: 03 111如下: 1:代表工作空间里的实体 2:代表某实体的子实体,可以控制它们的开关状态3:控制显示的地方
04 下面需要创建一个Body实体 这个实体代表了真实的物体。这个真实的物体的外形由我们导入的外形来定义。 ——我们导入的外形并不是真实的实体。这个概念要清楚。 但是今后基本上不会对这个真实的实体作什么操作。这种处理方式主要是为工作空间内有多个物体的时候准备的。 05 1:点击“创建Body” 2、3:点选这两个点 4:于是创建出一个叫“Body”的实体 操作中,左键选择,中键确认,右键完成并退出——类似的操作方法很多地方用到,要多练习,今后
网格划分实例详细步骤
一个网格划分实例的详解 该题目条件如下图所示: Part 1:本部分将平台考虑成蓝色的虚线 1. 画左边的第一部分,有多种方案。 方法一:最简单的一种就是不用布置任何初始的2dmesh直接用one volume 画,画出来的质量相当不错。 One volume是非常简单而且强大的画法,只要是一个有一个方向可以 mapped的实体都可以用这个方法来画网格,而事实上,很多不能map的单元也都可以用这个命令来画,所以在对三维实体进行网格划分的时候,收件推荐用one volume来试下效果,如果效果不错的话,就没有必要先做二维单元后再来画。 方法二:先在其一个面上生成2D的mesh,在来利用general选项,这样的优点是可以做出很漂亮的网格。
相比之下:方法二所做出来的网格质量要比一要高。 2. 画第二段的网格,同样演示两种方法: 方法一:直接用3D>solid map>one volume 方法二:从该段图形来看,左端面实际上由3个面组成,右端面由一个部分组成,故可以先将左端面的另两个部分的面网格补齐,再用general选项来拉伸,但是,问题是左面砖红色的部分仅为3D单元,而没有可供拉伸的源面网格,故,应该先用face命令生成二维网格后,再来拉伸,其每一步的结果分见下:
在用general选项时,有个问题需要注意:在前面我们说过,source geom和elemes to drag二选一都可以,但是这里就不一样了,因为source geom选面的话,只能选择一个面,而此处是3个面,所以这里只能选elemes to drag而不能选择source geom.
ansysworkbench中划分网格的几种方法
转自宋博士的博客 如何在ANSYS WORKBENCH中划分网格经常有朋友问到这个问题。我整理了一下,先给出第一个入门篇,说明最基本的划分思路。以后再对某些专题问题进行细致阐述。 ANSYS WORKBENCH中提供了对于网格划分的几种方法,为了便于说明问题,我们首先创建一个简单的模型,然后分别使用几种网格划分方法对之划分网格,从而考察各种划分方法的特点。 1. 创建一个网格划分系统。 2. 创建一个变截面轴。 先把一个直径为20mm的圆拉伸30mm成为一个圆柱体 再以上述圆柱体的右端面为基础,创建一个直径为26mm的圆,拉伸30mm得到第二个圆柱体。 对小圆柱的端面倒角2mm。
退出DM. 3.进入网格划分程序,并设定网格划分方法。双击mesh进入到网格划分程序。 下面分别考察各种网格划分方法的特点。(1)用扫掠网格划分。 对整个构件使用sweep方式划分网格。
结果失败。 该方法只能针对规则的形体(只有单一的源面和目标面)进行网格划分。(2)使用多域扫掠型网格划分。 结果如下
可见ANSYS把该构件自动分成了多个规则区域,而对每一个区域使用扫略网格划分,得到了很规则的六面体网格。这是最合适的网格划分方法。 (3)使用四面体网格划分方法。 使用四面体网格划分,且使用patch conforming算法。 可见,该方式得到的网格都是四面体网格。且在倒角处网格比较细密。 其内部单元如下图(这里剖开了一个截面) 使用四面体网格划分,但是使用patch independent算法。忽略细节。
?、网格划分结果如下图 此时得到的仍旧是四面体网格,但是倒角处并没有特别处理。(4)使用自动网格划分方法。 得到的结果如下图
网格划分方法
网格划分的几种基本处理方法 学习2010-01-10 17:13:52 阅读48 评论0 字号:大中小 贴体坐标法: 贴体坐标是利用曲线坐标,并使其坐标线与燃烧室外形或复杂计算区域边界重合,这样所有边界点能够用网格点来表示,不需要任何插值。一旦贴体坐标生成通过变换,偏微分方程求解可以不在任意形状的物理平面上,而在矩形或矩形的组合(空间问题求解域为长方体或它们的组合)转换平面上进行。这样计算与燃烧室外形无关,也与在物理平面上网格间隔无关。 而是把边界条件复杂的问题转换成一个边界条件简单的问题;这样不仅可避免因燃烧室外形与坐标网格线不一致带来计算误差,而且还可节省计算时间和内存,使流场计算较准确,同时方便求解,较好地解决了复杂形状流动区域的计算,在工程上比较广泛应 用。 区域法: 虽然贴体坐标系可以使坐标线与燃烧室外形相重合,从而解决复杂流动区域计算问题。但有时实际流场是一个复杂的多通道区域,很难用一种网格来模拟,生成单域贴体网格,即使生成了也不能保证网格质量,影响流场数值求解的效果。因此,目前常采用区域法或分区网格,其基本思想是,根据外形特点把复杂的物理域或复杂拓扑结构的网格,分成若干个区域,分别对每个子区域生成拓扑结构简单的网格。由这些子区域组合而成的网格,或结构块网格。对区域进行分区时,若相邻两个子域分离边界是协调对接,称为对接网格;若相邻两子域有相互重叠部分,则此分区网格称为重叠网格。根据实际数值模拟计算的需要,把整个区域(燃烧室)分成几个不同的子区域,并分别生成网格。这样不仅可提高计算精度,而且还可节省计算机内存,提高收敛精度。但是计算时,必须考虑各区域连接边界处耦合以及变量信息及时、准确地传递问题。处理各个区域连接有多种方法,其中一个办法是在求解各变量时各区域可以单独求解若干次而对压力校正方程.设压力校正值在最初迭代时为零,为了保证流量连续各个区域应同时求解,然后对各个速度和压力进行校正。或者采用在两个区域交界处有一个重叠区,两个区域都对重叠区进行计算,重叠区一边区域内的值,要供重叠区另一边区域求解时用。或通过在重叠内建立两个区域坐标对应关系,实现数据在重叠区内及时传递。如果两个区采用网格疏密分布不相同,要求重叠区二边流量相等。区域法能合理解决网格生成问题,已被大量用来计算复杂形状区域流动。 区域分解法: 对于复杂几何形状的实际燃烧装置,为了保证数值求解流场质量,目前常采用区域分解法。该法基本要点是:根据燃烧室形状特点和流场计算需要,把计算区域分成一个主区域和若干个子区域,对各个区域(块)分别建立网格,并对各个区域分别进行数值求解。区域分解原则是尽量使每个子区域边界简便以便于网格建立,各个子区域大小也尽可能相同,使计算负载平衡有利于平行计算。各区域的网格间距数学模型以及计算方法都可以不同,通常在变量变化梯度大的区域,可以布置较细网格,并采用高阶紊流模型和描述复杂反应的紊流燃烧模型,以便更合理模拟实际流场。对于变量变化不太大区域,可采用较疏的网格和较简单的数学模型,这样可节省计算时间。各子区域的解在相邻子区域边界处通过耦合条件来实现光滑,相邻子区域连接重叠网格或对接网格来实现,在各子区域交界处通过插值法提供各子域求解变量的信息传递,满足各子域流场计算要求通量和动量守恒条件以便实现在交界面处各子域流场解的匹配和 耦合,从而取得全流场解。 非结构网格法: 上述各方法所生成的网格均属于结构化网格,其共同特点是网格中各节点排列有序,每个节点与邻点之间关系是固定的,在计算区域内网格线和平面保持连续。特别是其中分区结构网格生成方法已积累了较多经验,计算技术也较成熟,目前被广泛用来构造复杂外形区域内网格。但是,若复杂外形稍有改变,则将需要重新划分区域和构造网格,耗费较多人力和时间。为此,近年来又发展了另一类网格——非结构网格。此类网格的基本特点是:任何空间区域都被以四面体为单元的网格所划分,网格节点不受结构性质限制,能较好地处理边界,每个节点的邻点个数也可不固定,因此易于控制网格单元的大小、形状及网格的位置。与结构网格相比,此类网格具有更大灵活性和对复杂外形适应性。在20世纪80年代末和90年代初,非结构网格得到了迅速发展。生成非结构网格方法主要有三角化方法和推进阵面法两种。虽然非结构网格容易适合复杂外形,但与结构网格相比还存在一些缺点:(1)需要较大内存记忆单元节点之
ICEM CFD教程
ICEM CFD教程 四面体网格 ?对于复杂外形,ICEM CFD Tetra具有如下优点: ?根据用户事先规定一些关键的点和曲线基于8叉树算法的网格生成,生成速度快,大约为1500 cells/second ?无需表面的三角形划分,直接生成体网格 ?四面体网格能够合并到混合网格中,并实施平滑操作 ?单独区域的粗化和细化 ?ICEM CFD的CAD(CATIA V4, UG, ProE, IGES, and ParaSolid, etc)接口,保留有CAD几何模型的参数化描述,网格可以在修改过的几何模型上重新生成 这是生成的燃烧室四面体网格,共有660万网格,生成时间约为50分钟 ?八叉树算法 Tetra网格生成是基于如下的空间划分算法:这种算法需要的区域保证必要的网格密度,但是为了快速计算尽量采用大的单元。 1.在几何模型的曲线和表面上规定网格尺寸 2.构造一个初始单元来包围整个几何模型 3.单元被不断细分来达到最大网格尺寸(每个维的尺寸按照1/2分割,对于三维就是 1/8)
4.均一化网格来消除悬挂网格现象 5.构造出最初的最大尺寸单元网格来包围整个模型 6.节点调整以匹配几何模型形状 7.剔除材料外的单元 8.进一步细分单元以满足规定的网格尺寸要求 9.通过节点的合并、移动、交换和删除进行网格平滑,节点大小位于最大和最 小网格尺寸之间
? 非结构化网格的一般步骤 1. 输入几何或者网格 所有几何实体,包括曲线、表面和点都放在part 中。通过part 用户可以迅速打开/关掉所有实体,用不同颜色区分,分配网格,应用不同的边界条件。几何被收录到通用几何文件.tin 中,.tin 文件可以被ANSYS ICEM CFD’s 所有模块 1.1输入几何体Import Geometry ? 第三方接口文件:ParaSolid 、STEP 、IGES 、DWG 、GEMS 、ACIS … ? 直接接口:Catia 、Unigraphics 、Pro/E 、SolidWorks 、I-deas… 几 何变化网格可以直接随之变化
ICEM 基础教程
第一章介绍 ICEM CFD 工程 Tutorials目录中每个工程是一个次级子目录。每个工程的目录下有下列子目录:import, parts, domains, mesh, 和transfer。他们分别代表: ? import/: 要导入到ICEMCFD中的集合模型交换文件,比如igs,STL等; ? parts/: CAD模型 ? domains/: 非结构六面体网格文件(hex.unstruct), 结构六面体网格分区文件(domain.n), 非结构四面体网格文件(cut_domain.1) ? mesh/: 边界条件文件(family_boco, boco),结构网格的拓扑定义文件(family_topo, topo_mulcad_out), 和Tetin几何文件(tetin1). ? transfer/: 求解器输入文件(star.elem), 用于Mom3d.的分析数据 mesh目录中Tetin文件代表将要划分网格的几何体。包含B-spline曲面定义和曲线信息,以及分组定义 Replay 文件是六面体网格划分的分块的脚本 鼠标和键盘操作
第二章ICEM CFD Mesh Editor界面 The Mesh Editor, 创建修改网格的集成环境,包含三个窗口 ? The ICEM CFD 主窗口 ? 显示窗口 ? The ICEM CFD 消息窗口 主窗口 主窗口中除了图形显示区域,外,还有6个radio按钮:File, Geometry, Meshing, Edit Mesh and Output. The File Menu The File menu 包含 ? Open, Save, Save as, Close, Quit, Project dir, Tetin file, Domain file, B.C file, Import geo, Export geo, Options, Utilities, Scripting, Annotations, Import mesh, DDN part.
网格划分的技巧和策略
在中国CAE论坛上看到这个,挺不错的 壳体单元网格划分时,如果能了解一些网格划分的技巧和策略,将会事半功倍。壳体网格划分可以从3个方面入手:几何模型、划分方法和解决策略。 1 几何模型 可以从以下几个方面了解和处理几何模型问题 (1)了解部件的形状,主要集中在尺寸小的部分。 (2)什么样的特征可以被忽略,例如小的倒角和圆孔。 (3)何种特征对分析是关键的特征,这些特征对确保好的单元质量是需要的。 2 划分方法(自动+手工) 可以采用如下方法 (1)将部件分割为不同的区域。 (2)每个区域必须有可能只使用一种三维网格模式。 (3)寻找下述特点区域:大量生成区域、对称性区域、产生困难的区域。 (4)寻找大量不同区域和方法。 (5)注意什么样的二维网格模式被要求。 (6)观察周围区域:什么功能可以在那里使用。 (7)二维网格模式是否可以延伸到相邻区域中。 (8)寻找对网格模式不能处理位置进行网格划分的方法:如果这样做了,寻找网格可以触及的曲面;注意周围网格将与此模式相融合。 (9)小特征融入大特征中;大特征划分网格时必须考虑到小特征。 (10)注意网格模式。 3 解决策略 壳体网格划分的主要策略如下 (1)内部特征衔接外部特征: l 不能变成被限制的。 l 网格模式需要一个面流入以便它们可以停止 l 从内到外划分网格可以避免此问题。 (2)小特征融入到大特征中:注意模式、大特征划分网格时必须考虑到小特征。 (3)硬特征应当先处理,否则它们会变得难于处理。 (4)通常情况下首先进行大量的生成,后面的编辑是比较容易的。 某些区域比较重要的网格划分的质量要求高些,如力的作用区域,边界条件所在的区域。一些设计区域和离设计区域比较远的地方可以适当放宽要求,但是最好是一些网格性能指标要满足。
器件网格划分方法的教学总结与归纳
器件网格划分方法的教学总结与归纳 一、前言微电子产业规模和技术水平是衡量国家综合实力的重要指标,在促进国民经济可持续性发展的同时,对国家安全战略的保护也有着重要的贡献。 [1] 积极培养掌握先进半导体知识与集成电路设计技术并符合企业需求的高端人才,是高等学校肩负的不可推卸的重要职责。在微电子相关课程体系教学过程中,引入半导体器件计算机模拟仿真技术,可以帮助学生理解抽象、复杂的基础理论,加强学生半导体技术实际应用能力的培养,实现理论教学与实践教学的紧密结合 [2] ,在一定程度上可以缓解教学投入与学校有限办学经费之间的矛盾。 要顺利开展半导体器件模拟仿真工作,首先面临所谓的网格划分问题。 [3] 网格划分指的是将非线性偏微分方程所描述的几何区域分割成有限个子区域的方法,把非线性偏微分方程的求解,简化为在更小单个子区域内线性方程组的求解。网格划分的优劣决定了方程求解速度的快慢,关系到数值求解是否能收敛及误差大小。在正确划分网格的基础上,越细致的网格,得到的数据与真实值的误差就越小,但仿真任务所需计算时间增加的就越快,所需计算硬件资源就越多越昂贵,甚至超出高等学校实际的办学条件。 半导体工艺及器件仿真工具 Sentaurus TCAD 是由 Synopsys 公司开发的最新软件,可以用来模拟集成器件的工艺制程、器件 物理特性和互连特性等,支持的仿真器件类型包括CMO、S 功率
器件、存储器、太阳能电池和光电探测器等,在高校微电子与半导体相关专业教学中逐渐得到了推广。 [4][5] 本文将以 Sentaurus软件对半导体PN结仿真模拟的任务为例,针对软件中SDE 模块中涉及的网格划分的主要内容与方法进行归纳整理,为相关课程的教学提供参考借鉴。 二、步骤与策略 网格的划分大致分为三个步骤:定义网格划分的策略,定义划分网格的区域,将网格划分的策略施加到相应区域上。这是 SDE中网格划分的基本的方法,当有部分区域没有被定义为网格划分区域时,将自动为该部分区域进行网格划分,但相对划分的部分会粗略许多。 对于网格区域的定义需要根据器件的结构和网格的划分策 略,SDE中提供了三种网格区域定义的方法:自定义窗口区域(Window)、通过选定器件的结构区域(Region)、通过选定器件的材料( Material )。三种网格区域定义的方法各有侧重,需要根据情况得当使用。 在网格区域划分的基础上便需要进行网格划分策略的选择,定义网格划分的策略也是网格划分过程中最核心的部分。软件中网格划分的基本思路是,在三个坐标轴方向上设定最小( Min)和最大划分因子(Max)的值,通过调节比例参数(Ratio ),改变最小因子到最大因子的变化速率(当比例参数为 1 时表示选用最小划分因子进行相应坐标轴上的划分)。按照各坐标轴的正方向由最小因子至最大因子的步长,并由最大因子的步长完成整个网格划分剩余的过程。在这里
ANSYS ICEM CFD中文教程
ANSYS.ICEM-CFD中文教程 ICEM CFD 工程 Tutorials目录中每个工程是一个次级子目录。每个工程的目录下有下列子目录:import, parts, domains, mesh, 和transfer。他们分别代表: ? import/: 要导入到ICEMCFD中的集合模型交换文件,比如igs,STL等; ? parts/: CAD模型 ? domains/: 非结构六面体网格文件(hex.unstruct), 结构六面体网格分区文件(domain.n), 非结构四面体网格文件(cut_domain.1) ? mesh/: 边界条件文件(family_boco, boco),结构网格的拓扑定义文件(family_topo, topo_mulcad_out), 和Tetin几何文件(tetin1). ? transfer/: 求解器输入文件(star.elem), 用于Mom3d.的分析数据 mesh目录中Tetin文件代表将要划分网格的几何体。包含B-spline曲面定义和曲线信息,以及分组定义 Replay 文件是六面体网格划分的分块的脚本 鼠标和键盘操作
第二章ICEM CFD Mesh Editor界面 The Mesh Editor, 创建修改网格的集成环境,包含三个窗口 ? The ICEM CFD 主窗口 ? 显示窗口 ? The ICEM CFD 消息窗口 主窗口 主窗口中除了图形显示区域,外,还有6个radio按钮:File, Geometry, Meshing, Edit Mesh and Output. The File Menu
网格划分原则
有限元分析中的网格划分好坏直接关系到模型计算的准确性。本文简述了网格划分应用的基本理论,并以ANSYS限元分析中的网格划分为实例对象,详细讲述了网格划分基本理论及其在工程中的实际应用,具有一定的指导意义。 1 引言 ANSYS有限元网格划分是进行数值模拟分析至关重要的一步,它直接影响着后续数值计算分析结果的精确性。网格划分涉及单元的形状及其拓扑类型、单元类型、网格生成器的选择、网格的密度、单元的编号以及几何体素。从几何表达上讲,梁和杆是相同的,从物理和数值求解上讲则是有区别的。同理,平面应力和平面应变情况设计的单元求解方程也不相同。在有限元数值求解中,单元的等效节点力、刚度矩阵、质量矩阵等均用数值积分生成,连续体单元以及壳、板、梁单元的面内均采用高斯(Gauss)积分,而壳、板、梁单元的厚度方向采用辛普生(Simpson)积分。辛普生积分点的间隔是一定的,沿厚度分成奇数积分点。由于不同单元的刚度矩阵不同,采用数值积分的求解方式不同,因此实际应用中,一定要采用合理的单元来模拟求解。 2 ANSYS网格划分的指导思想 ANSYS网格划分的指导思想是首先进行总体模型规划,包括物理模型的构造、单元类型的选择、网格密度的确定等多方面的内容。在网格划分和初步求解时,做到先简单后复杂,先粗后精,2D单元和3D单元合理搭配使用。为提高求解的效率要充分利用重复与对称等特征,由于工程结构一般具有重复对称或轴对称、镜象对称等特点,采用子结构或对称模型可以提高求解的效率和精度。利用轴对称或子结构时要注意场合,如在进行模态分析、屈曲分析整体求解时,则应采用整体模型,同时选择合理的起点并设置合理的坐标系,可以提高求解的精度和效率,例如,轴对称场合多采用柱坐标系。有限元分析的精度和效率与单元的密度和几何形状有着密切的关系,按照相应的误差准则和网格疏密程度,避免网格的畸形。在网格重划分过程中常采用曲率控制、单元尺寸与数量控制、穿透控制等控制准则。在选用单元时要注意剪力自锁、沙漏和网格扭曲、不可压缩材料的体积自锁等问题 ANSYS软件平台提供了网格映射划分和自由适应划分的策略。映射划分用于曲线、曲面、实体的网格划分方法,可使用三角形、四边形、四面体、五面体和六面体,通过指定单元边长、网格数量等参数对网格进行严格控制,映射划分只用于规则的几何图素,对于裁剪曲面或者空间自由曲面等复杂几何体则难以控制。自由网格划分用于空间自由曲面和复杂实体,采用三角形、四边形、四面体进行划分,采用网格数量、边长及曲率来控制网格的质量。 3 ANSYS网格划分基本原则 3.1 网格数量 网格数量的多少将影响计算结果的精度和计算规模的大小。一般来讲,网格数量增加,计算精度会有所提高,但同时计算规模也会增加,所以在确定网格数量时应权衡两个因数综合考虑。
有限元网格划分及发展趋势
有限元网格划分及发展趋势 摘要:总结近十年有限元网格划分技术发展状况。首先,研究和分析有限元网格划分的基本原则;其次,对当前典型网格划分方法进行科学地分类,结合实例,系统地分析各种网格划分方法的机理、特点及其适用范围,如映射法、基于栅格法、节点连元法、拓扑分解法、几何分解法和扫描法等;再次,阐述当前网格划分的研究热点,综述六面体网格和曲面网格划分技术;最后,展望有限元网格划分的发展趋势。关键词:有限元网格划分;映射法;基于栅格法;节点连元法;拓扑分解法;几何分解法;扫描法;六面体网格 1 引言 作为有限元走向工程应用枢纽的有限元网格划分,是有限元法的一个非常重要的研究领域,经历了40多年的发展历程。有限元网格划分算法研究中的某些难点问题始终未能得到真正意义上的解决,它们的解决对工程问题具有重要的现实价值和理论意义。有限元分析的基本过程可分为三个阶段:有限元模型的建立(即前处理)、有限元解算、结果处理和评定(即后处理)。根据经验,有限元分析各阶段所用的时间为】 【1:40%-45%用于模型的前处理,50%-55%用于后处理,而分析计算只占5%左右;更有文献】 【2指出有限元建模占有限元分析一半以上的工作量,甚至高达80%。因此,有限元分析的前后处理一直都是有限元分析的瓶颈问题,严重地阻碍着有限元分析技术的应用和发展。 许多学者对有限元网格生成方法近30年的研究进行了概括和总结】 【4。近年来,【3,对某些重要分支领域的研究进展方面也做出了贡献】 有限元网格生成方法研究有两个显著特点:(1)经历了一个进化过程,一些方法的研究与应用出现停滞,而另外一些方法在不断地深入、完善和发展,成为适应性强、应用范围广泛的通用方法;(2)领域和主题在不断扩展和深入,研究重点由二维平面问题转移到三维曲面和三维实体问题,从三角形、四面体网格自动生成转移到四边形、六面体网格自动生成。 2 有限元网格划分的基本原则 有限元方法的基本思想是将结构离散化,即对连续体进行离散化,
workbench网格划分的_很实用的讲解
ANSYS WORKBENCH中提供了对于网格划分的几种方法,为了便于说明问题,我们首先创建一个简单的模型,然后分别使用几种网格划分方法对之划分网格,从而考察各种划分方法的特点。 1. 创建一个网格划分系统。 2. 创建一个变截面轴。 先把一个直径为20mm的圆拉伸30mm成为一个圆柱体 再以上述圆柱体的右端面为基础,创建一个直径为26mm的圆,拉伸30mm得到第二个圆柱体。对小圆柱的端面倒角2mm。 退出DM. 3.进入网格划分程序,并设定网格划分方法。 双击mesh进入到网格划分程序。 下面分别考察各种网格划分方法的特点。 (1)用扫掠网格划分。 对整个构件使用sweep方式划分网格。 结果失败。 该方法只能针对规则的形体(只有单一的源面和目标面)进行网格划分。 (2)使用多域扫掠型网格划分。 结果如下 可见ANSYS把该构件自动分成了多个规则区域,而对每一个区域使用扫略网格划分,得到了很规则的六面体网格。这是最合适的网格划分方法。 (3)使用四面体网格划分方法。
使用四面体网格划分,且使用patch conforming算法。 可见,该方式得到的网格都是四面体网格。且在倒角处网格比较细密。 其内部单元如下图(这里剖开了一个截面) 使用四面体网格划分,但是使用patch independent算法。忽略细节。 、 网格划分结果如下图 此时得到的仍旧是四面体网格,但是倒角处并没有特别处理。 (4)使用自动网格划分方法。 得到的结果如下图 该方法实际上是在四面体网格和扫掠网格之间自动切换。当能够扫掠时,就用扫掠网格划分;当不能用扫掠网格划分时,就用四面体。这里不能用扫掠网格,所以使用了四面体网格。(5)使用六面体主导的网格划分方法。 得到的结果如下 该方法在表面用六面体单元,而在内部也尽量用六面体单元,当无法用六面体单元时,就用四面体单元填充。由于四面体单元相对较差,所以它比较能够保证表面的单元质量。 总体来说,对于空间物体而言,我们应当尽量使用六面体网格。 当对象是一个简单的规则体时,使用扫掠网格划分是合适的; 当对象是对个简单的规则体组成时,使用多域扫掠网格划分是合适的; 接着尽量使用六面体主导的方式,它会在外层形成六面体网格,而在心部填充四面体网格。四面体网格是最后的选择。其中 如果要忽略一些小细节,如倒角,小孔等,则使用patch independent算法; 如果要要考虑一些小细节,则使用patch conforming算法。
有限元网格划分
本文讨论了有限元网格的重要概念,包括单元的分类、有限元误差的分类与影响因素;并讨论分析结果的收敛性控制方法,并由实例说明了网格质量及收敛性对取得准确分析结果的重要性。同时讨论了一些重要网格控制的建议及其他网格设定的说明。 一、基本有限元网格概念 1.单元概述 几何体划分网格之前需要确定单元类型。单元类型的选择应该根据分析类型、形状特征、计算数据特点、精度要求和计算的硬件条件等因素综合考虑。为适应特殊的分析对象和边界条件,一些问题需要采用多种单元进行组合建模。 2.单元分类 选择单元首先需要明确单元的类型,在结构有限元分析中主要有以下一些单元类型:平面应力单元、平面应变单元、轴对称实体单元、空间实体单元、板单元、壳单元、轴对称壳单元、杆单元、梁单元、弹簧单元、间隙单元、质量单元、摩擦单元、刚体单元和约束单元等。根据不同的分类方法,上述单元可以分成以下不同的形式。 3.按照维度进行单元分类 根据单元的维数特征,单元可以分为一维单元、二维单元和三维单元。 一维单元的网格为一条直线或者曲线。直线表示由两个节点确定的线性单元。曲线代表由两个以上的节点确定的高次单元,或者由具有确定形状的线性单元。杆单元、梁单元和轴对称壳单元属于一维单元,如图1~图3所示。
二维单元的网格是一个平面或者曲面,它没有厚度方向的尺寸。这类单元包括平面单元、轴对称实体单元、板单元、壳单元和复合材料壳单元等,如图4所示。二维单元的形状通常具有三角形和四边形两种,在使用自动网格剖分时,这类单元要求的几何形状是表面模型或者实体模型的边界面。采用薄壳单元通常具有相当好的计算效率。 三维单元的网格具有空间三个方向的尺寸,其形状具有四面体、五面体和六面体,这类单元包括空间实体单元和厚壳单元,如图5所示。在自动网格划分时,它要求的是几何模型是实体模型(厚壳单元是曲面也可以)。 4.按照插值函数进行单元分类 根据单元插值函数多项式的最高阶数多少,单元可以分为线性单元、二次单元、三次单元和更高次的单元。 线性单元具有线性形式的插值函数,其网格通常只具有角节点而无边节点,网格边界为直线或者平面。这类单元的优点是节点数量少,在精度要求不高或