基于改进Sobel算法的实时边缘检测系统王军辉

总第272期
2012年第6期
计算机与数字工程
Computer &Digital Engineering
Vol.40No.6
130
基于改进Sobel算法的实时边缘检测系统*
王军辉 李瑞克 刘小洋
(西北工业大学电子信息学院机载电子综合信息系统研究生创新实验室 西安 710129)
摘 要 针对传统的Sobel边缘检测算存在对噪声敏感和缺乏自适应能力等缺点,提出了一种结合中值滤波与自适应阈值的改进So-bel边缘检测算法。并使用Verilog HDL语言在FPGA上实现了基于该算法的实时边缘检测系统。实验结果表明,该系统对环境有很强的适应能力,能够实时有效地提取出图像边缘。
关键词 边缘检测;Sobel;FPGA;中值滤波;自适应阈值
中图分类号 TP391.41
Real-Time Edge Detection System Based on Improved Sobel Algorithm
WANG Junhui LI Ruike LIU Xiaoyang
(Graduate Innovation Laboratory for Airborne Electronic Compositive Information System,
Department of Electronic and Information,Northwestern Polytechnical University,Xi an 710129)
Abstract Aiming at the problem that the traditional Sobel algorithm has shortcomings such as sensitivity to noise and lack of adaptivecapacity,an improved Sobel edge detection algorithm combined with median filtering and self-adaptive threshold is proposed.And the real-time edge detection system based on this algorithm is realized in FPGA by using Verilog HDL language.Experimental results show that thesystem is adaptive to the environment and can extract the edge of image efficiently and duly.
Key Words edge detection,Sobel,FPGA,median filtering,self-adaptive threshold
Class Number TP391.41
1 引言
边缘检测是通过检测图像灰度变化确定图像边缘的过程。它是实现图像分割、目标区域识别以及区域形状提取等图像处理技术的基础。边缘检测算法处理的数据量大,用传统的软件方法实现,很难达到实时系统的要求。而利用FPGA的并行结构和流水线技术,可提高图像边缘检测的处理速度,满足系统实时性要求。
Sobel算法是一种基于梯度的边缘检测算法。相比其它边缘检测算子[1],Sobel算子的计算简单,只涉及到乘加运算,同时具有非线性和一定的平滑效果,并且可以取得很好的边缘检测效果,所以是最常用的实时边缘检测算法[2]。
本文在研究传统Sobel边缘检测算法[3]的基础上,对它进行了改进,并在FPGA中实现了基于改进Sobel算法的实时边缘检测系统。实验证明该系统能满足实时性的要求,而且检测精度和抗噪能力都比较理想。
2 系统总体设计
本系统硬件由CMOS摄像头、FPGA芯片、SDRAM芯片、VGA接口电路和VGA显示器等部分组成[4]。在FP-GA内部,通过Verilog硬件编程语言实现I2 C配置模块、图像采集模块、改进的Sobel边缘检测模块、SDRAM控制器
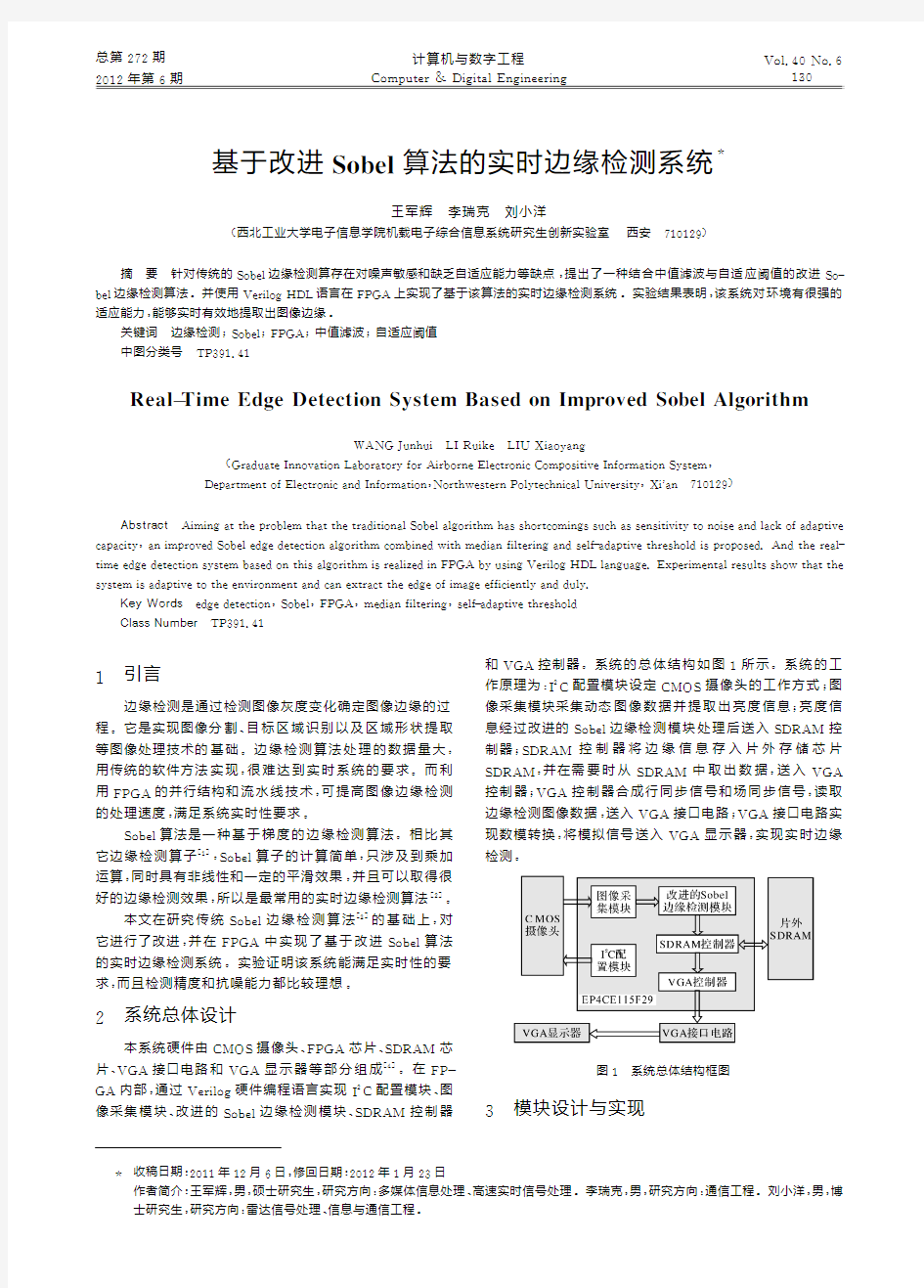
和VGA控制器。系统的总体结构如图1所示。系统的工作原理为:I2 C配置模块设定CMOS摄像头的工作方式;图像采集模块采集动态图像数据并提取出亮度信息;亮度信息经过改进的Sobel边缘检测模块处理后送入SDRAM控制器;SDRAM控制器将边缘信息存入片外存储芯片SDRAM,并在需要时从SDRAM中取出数据,送入VGA控制器;VGA
控制器合成行同步信号和场同步信号,读取边缘检测图像数据,送入VGA接口电路;VGA接口电路实现数模转换,将模拟信号送入VGA显示器,实现实时边缘检测。
图1 系统总体结构框图
3 模块设计与实现
*收稿日期:2011年12月6日,修回日期:2012年1月23日
作者简介:王军辉,男,硕士研究生,研究方向:多媒体信息处理、高速实时信号处理。李瑞克,男,研究方向:通信工程。刘小洋,男,博士研究生,研究方向:雷达信号处理、信息与通信工程。
2012年第6期
计算机与数字工程131
3.1 I2 C配置模块
本次设计中采用CMOS摄像头OV7725进行图像采
集,该摄像头支持通过I2
C总线对包括输出图像格式、帧率、分辨率、曝光时间等参数进行配置和调节。FPGA模拟
I2
C总线对其内部寄存器进行配置,
其具体操作过程可分为三个阶段:写入器件ID地址、写入寄存器地址和写入控制数据。边缘检测只需要图像的亮度信息,所以通过I2
C配
置模块设定OV7725的图像输出格式为YUV4∶2∶2,速率为30帧/秒,分辨率为640×480。3.2 图像采集模块
OV7725工作在YUV4∶2∶2图像输出格式下,每行像素数据为1280字节,亮度数据和色度数据交替输出。所以图像采集模块需要根据OV7725的行、场同步信号和像素时钟信号,分离出亮度数据,并构造出亮度数据的时钟信号。图像采集模块的SignalTap
II测试波形如图2所示
。图2 图像采集模块测试波形图
3.3 改进的Sobel边缘检测模块
传统的Sobel边缘检测算法计算简单,可以实现很好的实时边缘检测效果,但同时也存在着对噪声敏感和缺乏
自适应能力等缺点[5]
。为了得到更好的检测效果,本文采
用一种结合中值滤波与自适应阈值的改进Sobel边缘检测算法。在FPGA上实现改进Sobel边缘检测算法的结构框图如图3所示
。
图3 改进的Sobel边缘检测算法框图
图像亮度数据首先通过中值滤波,滤除干扰噪声。然后进行梯度计算,得到像素点的梯度值。最后,梯度值一方面进入阈值计算模块,得到下帧图像的阈值;另一方面通过阈值检测,输出边缘图像。3.3.1 中值滤波
中值滤波的基本原理是将数字图像中某一点的值用该点邻域中各点值的中值代替。它是一种非线性空间滤波方
法[6],与线性滤波[7]
(如均值滤波、高斯滤波)等方法相比,
能很好地滤除脉冲噪声,对多种噪声都有着很好的适应性,并且可有效地保护图像的边缘。
中值滤波在FPGA上的实现主要包括窗口模块和排序
模块两部分组成[
8]
。首先通过3×3窗口模板得到图像中某点邻域内的9个点,然后通过排序模块得到此邻域内的中值。为了得到3×3的方形模板窗,常用的方法是使用FIFO模块作为图像数据的缓冲器。本设计中通过调Qu-
artus中基于RAM的移位寄存器宏模块altshift_taps,实现了同样的功能,而且还省去了一些控制信号,使用十分方便。在排序模块中,采用通过三级比较求得中值的方法。即先由3×3窗口产生的9个图像数据,经过第一级比较器后,将各组的最大值、中间值和最小值分别送到第二级的三个比较器中,经过再次比较后将各组的中间值送到第三级
比较器中,最后通过第三级的比较得出中值。三级比较并行运行,
只需一个时钟即可输出中值。3.3.2 梯度计算和阈值检测
利用Sobel算子进行梯度计算时,首先要计算出水平梯度和垂直梯度;
然后再把两个方向的梯度结合起来得到最终的梯度值;最后通过阈值检测模块判断图像边缘,并输
出边缘检测结果[
9]
。像素点的水平梯度和垂直梯度可由3×3图像区域与相应的3×3算子模板卷积得到,
如图4所示。其中3×3图像区域也是通过调用移位寄存器宏模块altshift_taps实现。′为算子模板数据。为了实现卷积运算,一般的做法是采用分立的D触发器和加法器以及乘法器。这种方法存在结构复杂、性能较差的缺点。本设计中采用Quartus自带
的可编程乘加器altmult_add模块和可编程多路并行加法器parallel
_add模块实现卷积运算,大大简化了设计,提高了算法的性能
。
图4 卷积运算原理图
通过卷积得到水平梯度和垂直梯度后,将两者的绝对
值相加得到对应像素点的梯度值,再与阈值检测模块的阈值比较,大于阈值的点即为检测到的边缘。
3.3.3 下帧图像阈值计算
在传统的Sobel算法中,阈值往往是根据经验来选取的。这种阈值选取方法存在盲目和适应性差等缺点。本文采用一种基于梯度直方图的自适应阈值选取算法。在计算当前帧图像各像素点梯度的同时,通过梯度直方图得到下帧图像的阈值。这种算法既实现了阈值的自适应,又能满足实时边缘检测系统对于算法实时性的要求。
在一幅图像中,非边缘像素点的数目占总像素数目的比例为0.7~0.9,本设计中取0.8。这样在得到图像的梯度直方图后,从低到高累加像素点数目,当累加和达到总像素数的80%时,对应的图像梯度值即为下帧图像的阈值。
梯度直方图基于双端口RAM(hist_buffer)及其控制器完成
[10]
。经过计算,存储器宽度为16bit,深度为512。当
有梯度数据输入时,RAM中地址等于当前输入梯度值的内容被读出,加1后再存入该地址。如此进行下去,直到整幅图像扫描完毕,得到梯度的直方图。然后按照地址从小到大的顺序依次累加RAM中的值,当累加和不小于图像总像素数的80%时,输出对应的地址,即为下帧图像的阈值。具体实现方法如图5所示。
132
王军辉等:基于改进Sobel算法的实时边缘检测系统
第40
卷
图5 阈值计算的原理框图
3.4 SDRAM控制器
考虑到数据采集处理和显示之间的非同步性,采用SDRAM作为图像的帧缓冲器,SDRAM控制器通过模拟SDRAM的复杂时序实现对片外SDRAM芯片的读写操作。SDRAM控制器将一个SDRAM数据端口仿真成两个
虚拟的数据端口:1个写端口和1个读端口[1
2]
。通过虚拟写数据端口将图像边缘数据存入SDRAM中,同时,根据VGA控制器提供的时序信号,通过虚拟读端口从SDRAM
读取数据,送入VGA控制器,形成一个完整的帧缓冲器。改进的Sobel边缘检测模块、VGA控制器和SDRAM的读写时序不一致,所以在虚拟的写端口和读端口中加入异步FIFO,实现数据缓冲。3.5 VGA控制器
VGA控制器的设计方法为:
首先根据VGA显示器的时序要求合成像素时钟、
行同步信号、场同步信号以及消隐信号;然后在正确的时序控制下,读出帧缓冲器中的边缘检测数据,并送入VGA接口电路。
4 实验结果与分析
为了验证该系统的边缘检测效果,以Altera DE2-
115开发板为平台,将改进算法与传统Sobel算法的效果进行比较,如图6所示。其中,图6(a)为采集到的灰度图像,图6(b)为传统Sobel算法处理后的图像,图6(c)为改进的So-
bel算法处理后的图像。通过对比可以看出,
本文所设计的实时边缘检测系统能够有效地滤除噪声,并在环境复杂多变的情况下实时有效地提取出图像边缘
。
图6 实验结果
5 结语
本文提出并实现了一种基于改进Sobel算法的实时边缘检测系统。在传统Sobel边缘检测算法的基础上加入中值滤波和自适应阈值,并通过Verilog硬件编程语言在FPGA上实现。实验结果表明,该系统对噪声有较强的抑制能力,具有良好的边缘检测效果,可适用于对实时性要求较高的智能
监控、安防、模式识别、工业控制等领域。
参考文献
[1]WANG X.Laplacian operator-based edg
e detectors[J].IEEE Trans-actions on Pattern Analysis and Machine Intelligence,2007,29(5):886-
890.[2]MOHSEN S,MAHMOUD F,MARYAM T M.A classified
andcomparative study of edge detection algorithms[C]//InternationalConference on Information Technology:Coding and Computing.I-ran:IEEE,2002:117-
120.[3]ABBASI T A,ABBASI M U.A novel FPGA architecture for
Sobeledge detection operator[J].International Journal of Electronics,2007,94(9):889-
896.[4]仙云森.基于FPGA的图像处理算法研究及硬件设计[D].
大连理工大学,2007.
XIAN Yunsen.Research of Image Processing Algorithms and Hard-ware Design Based on FPGA[D].Dalian University of Teclmology,2007.
[5]GEORGII K.A scalable,hig
h-precision and low-noise detector ofshift-invariant image locations[J].Pattern Recognition Letters,2010,32(2):145-
152.[6]LALIGANT O,TRUCHETET F.A nonlinear derivative
schemeapplied to edge detection[J].IEEE Transactions on Pattern Analysisand Machine Intellig
ence,2010,32(2):242-257.[7]DEMIGNY D.On optimal linear filtering
for edge detection[J].IEEE Transactions on Image Processing,2002,7(11):78-88.[8]徐大鹏,李从善.基于FPGA的数字图像中值滤波器设计[J].
电子器件,2006,29(4):114-
117.XU Dapeng,LI Congshan.Design of Median Filter for Digital ImageBased on FPGA[J].Chinese Journal of Electron Devices,2006,29(4):114-
117.[9]李明,赵勋杰,毛伟民.Sobel边缘检测的FPGA实现[J].
现代电子技术,2009,16:44-
46.LI Ming,ZHAO Xunjie,MAO Weimin.Implementation of SobelEdge Detection Based on FPGA[J].Modern Electronics Technique,2009,(16):44-
46.[10]杨光宇,佟鑫新,朱丹.一种基于FPGA的实时直方图统计方法
[J].机电工程,2007,24(4):67-
69.YANG Guangyu,TONG Xinxin,ZHU Dan.A method of real-timehistogram statistic based on FPGA[J].Journal of Mechanical &E-lectrical Engineering
,2007,24(4):67-69.[11]吴晓琳,张东.基于遗传算法实现数字图像边缘检测[J].
舰船电子工程,2011(9).
WU Xiaolin,ZHANG Dong.Edge Detection Technique Based onGenetic Algorithm[J].Ship Electronic Engineering,2011(9).[12]HE W H,YUAN K.An improved canny
edge detector and its re-alization on FPGA[C]//7th World Congress on Intelligent Controland Automation.Chongqing
:IEEE,2008:6561-6564.
基于小波变换的图像边缘检测算法
基于小波变换的图像边缘检测算法仿真实 现 学生姓名:XX 指导教师:xxx 专业班级:电子信息 学号:00000000000 学院:计算机与信息工程学院 二〇一五年五月二十日
摘要 数字图像边缘检测是图像分割、目标区域识别和区域形态提取等图像分析领域中十分重要的基础,是图像识别中提取图像特征一个重要方法。 目前在边缘检测领域已经提出许多算法,但是提出的相关理论和算法仍然存在很多不足之处,在某些情况下仍然无法很有效地检测出目标物的边缘。由于小波变换在时域和频域都具有很好的局部化特征,并且具有多尺度特征,因此,利用多尺度小波进行边缘检测既能得到良好的抑制噪声的能力,又能够保持边缘的完备。 本文就是利用此方法在MATLAB环境下来对数字图像进行边缘的检测。 关键词:小波变换;多尺度;边缘检测
Abstract The boundary detection of digital image is not only the important foundation in the field of image segmentation and target area identification and area shape extraction, but also an important method which extract image feature in image recognition. Right now, there are a lot of algorithms in the field of edge detection, but these algorithms also have a lot of shotucuts, sometimes, they are not very effective to check the boundary of the digital image. Wavelet transform has a good localization characteristic in the time domain and frequency domain and multi-scale features, So, the boundary detection of digital image by using multi-scale wavelet can not only get a good ability to suppress noise, but also to maintain the completeness of the edge. This article is to use this method in the environment of MATLAB to detect the boundary of the digital image. Keywords: wavelet transform; multi-scale; boundary detection.
边缘检测
CSDN亲密携手阿里云重磅推出云邮箱服务HTML5群组诚募管理员,“活跃之星”活动火热进行中Canny边缘检测算法原理及其VC实现详解(一) 2011-10-20 21:39560人阅读评论(0)收藏举报图象的边缘是指图象局部区域亮度变化显著的部分,该区域的灰度剖面一般可以看作是一个阶跃,既从一个灰度值在很小的缓冲区域内急剧变化到另一个灰度相差较大的灰度值。图象的边缘部分集中了图象的大部分信息,图象边缘的确定与提取对于整个图象场景的识别与理解是非常重要的,同时也是图象分割所依赖的重要特征,边缘检测主要是图象的灰度变化的度量、检测和定位,自从1959提出边缘检测以来,经过五十多年的发展,已有许多中不同的边缘检测方法。根据作者的理解和实践,本文对边缘检测的原理进行了描述,在此基础上着重对Canny检测算法的实现进行详述。 本文所述内容均由编程验证而来,在实现过程中,有任何错误或者不足之处大家共同讨论(本文不讲述枯燥的理论证明和数学推导,仅仅从算法的实现以及改进上进行原理性和工程化的描述)。 1、边缘检测原理及步骤 在之前的博文中,作者从一维函数的跃变检测开始,循序渐进的对二维图像边缘检测的基本原理进行了通俗化的描述。结论是:实现图像的边缘检测,就是要用离散化梯度逼近函数根据二维灰度矩阵梯度向量来寻找图像灰度矩阵的灰度跃变位置,然后在图像中将这些位置的点连起来
就构成了所谓的图像边缘(图像边缘在这里是一个统称,包括了二维图像上的边缘、角点、纹理等基元图)。 在实际情况中理想的灰度阶跃及其线条边缘图像是很少见到的,同时大多数的传感器件具有低频滤波特性,这样会使得阶跃边缘变为斜坡性边缘,看起来其中的强度变化不是瞬间的,而是跨越了一定的距离。这就使得在边缘检测中首先要进行的工作是滤波。 1)滤波:边缘检测的算法主要是基于图像强度的一阶和二阶导数,但导数通常对噪声很敏感,因此必须采用滤波器来改善与噪声有关的边缘检测器的性能。常见的滤波方法主要有高斯滤波,即采用离散化的高斯函数产生一组归一化的高斯核(具体见“高斯滤波原理及其编程离散化实现方法”一文),然后基于高斯核函数对图像灰度矩阵的每一点进行加权求和(具体程序实现见下文)。 2)增强:增强边缘的基础是确定图像各点邻域强度的变化值。增强算法可以将图像灰度点邻域强度值有显著变化的点凸显出来。在具体编程实现时,可通过计算梯度幅值来确定。 3)检测:经过增强的图像,往往邻域中有很多点的梯度值比较大,而在特定的应用中,这些点并不是我们要找的边缘点,所以应该采用某种方法来对这些点进行取舍。实际工程中,常用的方法是通过阈值化方法来检测。 2、Canny边缘检测算法原理
经典图像边缘检测
经典图像边缘检测(微分法思想)——Sobel算子 2008-05-15 15:29Sobel于1970年提出了Sobel算子,与Prewitt算子相比较,Sobel算子对检测点的上下左右进一步加权。其加权模板如下: 经典图像边缘检测(微分法思想)——Roberts交叉算子 2008-05-14 17:16 如果我们沿如下图方向角度求其交叉方向的偏导数,则得到Roberts于1963年提出的交叉算子边缘检测方法。该方法最大优点是计算量小,速度快。但该方法由于是采用偶数模板,如下图所示,所求的(x,y)点处梯度幅度值,其实是图中交叉点处的值,从而导致在图像(x,y)点所求的梯度幅度值偏移了半个像素(见下图)。
上述偶数模板使得提取的点(x,y)梯度幅度值有半个像素的错位。为了解决这个定位偏移问题,目前一般是采用奇数模板。 奇数模板: 在图像处理中,一般都是取奇数模板来求其梯度幅度值,即:以某一点(x,y)为中心,取其两边相邻点来构建导数的近似公式:
这样就保证了在图像空间点(x,y)所求的梯度幅度值定位在梯度幅度值空间对应的(x,y)点上(如下图所示)。 前面我们讲过,判断某一点的梯度幅度值是否是边缘点,需要判断它是否大于设定的阈值。所以,只要我们设定阈值时考虑到加权系数产生的影响便可解决,偏导数值的倍数不是一个问题。 经典图像边缘检测(微分法思想)——Prewitt算子 2008-05-15 11:29 Prewitt算子 在一个较大区域中,用两点的偏导数值来求梯度幅度值,受噪声干扰很大。若对两个点的各自一定领域内的灰度值求和,并根据两个灰度值和的差来计算x,y的偏导数,则会在很
几种常用边缘检测算法的比较
几种常用边缘检测算法的比较摘要:边缘是图像最基本的特征,边缘检测是图像分析与识别的重要环节。基于微分算子的边缘检测是目前较为常用的边缘检测方法。通过对Roberts,Sobel,Prewitt,Canny 和Log 及一种改进Sobel等几个微分算子的算法分析以及MATLAB 仿真实验对比,结果表明,Roberts,Sobel 和Prewitt 算子的算法简单,但检测精度不高,Canny 和Log 算子的算法复杂,但检测精度较高,基于Sobel的改进方法具有较好的可调性,可针对不同的图像得到较好的效果,但是边缘较粗糙。在应用中应根据实际情况选择不同的算子。 0 引言 边缘检测是图像分析与识别的第一步,边缘检测在计算机视觉、图像分析等应用中起着重要作用,图像的其他特征都是由边缘和区域这些基本特征推导出来的,边缘检测的效果会直接影响图像的分割和识别性能。边缘检测法的种类很多,如微分算子法、样板匹配法、小波检测法、神经网络法等等,每一类检测法又有不同的具体方法。目前,微分算子法中有Roberts,Sobel,Prewitt,Canny,Laplacian,Log 以及二阶方向导数等算子检测法,本文仅将讨论微分算子法中的几个常用算子法及一个改进Sobel算法。 1 边缘检测
在图像中,边缘是图像局部强度变化最明显的地方,它主要存在于目标与目标、目标与背景、区域与区域( 包括不同色彩) 之间。边缘表明一个特征区域的终结和另一特征区域的开始。边缘所分开区域的内部特征或属性是一致的,而不同的区域内部特征或属性是不同的。边缘检测正是利用物体和背景在某种图像特征上的差异来实现检测,这些差异包括灰度、颜色或纹理特征,边缘检测实际上就是检测图像特征发生变化的位置。边缘的类型很多,常见的有以下三种: 第一种是阶梯形边缘,其灰度从低跳跃到高; 第二种是屋顶形边缘,其灰度从低逐渐到高然后慢慢减小; 第三种是线性边缘,其灰度呈脉冲跳跃变化。如图1 所示。 (a) 阶梯形边缘(b) 屋顶形边缘 (b) 线性边缘 图像中的边缘是由许多边缘元组成,边缘元可以看作是一个短的直线段,每一个边缘元都由一个位置和一个角度确定。边缘元对应着图像上灰度曲面N 阶导数的不连续性。如果灰度曲面在一个点的N 阶导数是一个Delta 函数,那么就
图像边缘检测算法体验步骤
图像边缘检测算法体验步骤 图像边缘检测算法体验步骤(Photoshop,Matlab)1. 确定你的电脑上已经安装了Photoshop和Matlab2. 使用手机或其他任何方式,获得一张彩色图像(任何格式),建议图像颜色丰富,分辨率比较高,具有比较明显的图像边界(卡通图像,风景图像,桌面图像)3. 将图像保存到一个能够找到的目录中,例如img文件夹(路径上没有汉字)4. 启动Photoshop,打开img文件夹中的图像5. 在工具箱中选择“矩形选择”工具,到图面上选择一个区域(如果分辨率比较高,建议不要太大,否则计算过程比较长)6. 点击下拉菜单【文件】-【新建】,新建一个与矩形选择框同样尺寸的Photoshop图像,不要求保存该图像7. 将该彩色图像转换为亮度图像,即点击下拉菜单【图像】-【模式】-【灰度】,如提示是否合并,选择“Yes”8. 将该单色的亮度图像另存为Windows的BMP文件,点击下拉菜单【文件】-【存储为】,在“存储为”窗口中,为该文件起一个名字,例如test1(保存为test1.bmp)9. 启动Matlab,将当期路径(Current Directory)定位到图像文件夹,例如这里的img文件夹10. 使用imread命令读入该图像,在命令行输入:>> f = imread(test1.bmp);11. 在Matlab中显示该图像,在命令行输入:>> figure, imshow(f)12. 然后,分别使用Matlab图像工具箱中的Edge函数,分别使用Sobel算法,高斯-拉普拉斯(Log)算法和Canny算法得到的边缘图像:在命令行输入:>> g_sobel = edge(f, sobel, 0.05); >> g_log = edge(f, log, 0.003, 2.25); >> g_canny = edge(f, canny, [0.04 0.10], 1.5);13 得到边缘图像计算结果后,显示这些边缘图像: >> figure, imshow(g_sobel) >> figure, imshow(g_log) >> figure, imshow(g_canny)14 可以用不同的图像做对比,后续课程解释算法后,可以变换不同的阈值,得到不同的边缘图像
canny sobel算子
基于sobel 、canny 的边缘检测实现 一.实验原理 Sobel 的原理: 索贝尔算子(Sobel operator )是图像处理中的算子之一,主要用作边缘检测。在技术上,它是一离散性差分算子,用来运算图像亮度函数的梯度之近似值。在图像的任何一点使用此算子,将会产生对应的梯度矢量或是其法矢量. 该算子包含两组3x3的矩阵,分别为横向及纵向,将之与图像作平面卷积,即可分别得出横向及纵向的亮度差分近似值。如果以A 代表原始图像,Gx 及Gy 分别代表经横向及纵向边缘检测的图像,其公式如下: 101202*101x G A -+?? ?=-+ ? ?-+?? 121000*121y G A +++?? ?= ? ?---?? 图像的每一个像素的横向及纵向梯度近似值可用以下的公式结合,来计算梯度的大小。 在以上例子中,如果以上的角度Θ等于零,即代表图像该处拥有纵向边缘,左方较右方暗。 在边沿检测中,常用的一种模板是Sobel 算子。Sobel 算子有两个,一个是检测水平边沿的 ;另一个是检测垂直平边沿的 。与 和 相比,Sobel 算子对于象素的位置的影响做了加权,因此效果更好。 Sobel 算子另一种形式是各向同性Sobel(Isotropic Sobel)算子,也有两个,一个是检测水平边沿的 ,另一个是检测垂直平边沿的 。各向同性Sobel 算子和普通Sobel 算子相比,它的位置加权系数更为准确,在检测不同方向的边沿时梯度的幅度一致。由于建筑物图像的特殊性,我们可以发现,处理该类型图像轮廓时,并不需要对梯度方向进行运算,所以程序并没有给出各向同性Sobel 算子的处理方法。 由于Sobel 算子是滤波算子的形式,用于提取边缘,可以利用快速卷积函数, 简单有效,因此应用广泛。美中不足的是,Sobel 算子并没有将图像的主体与背景严格地区分开来,换言之就是Sobel 算子没有基于图像灰度进行处理,由于Sobel 算子没有严格地模拟人的视觉生理特征,所以提取的图像轮廓有时并不能令人满意。 在观测一幅图像的时候,我们往往首先注意的是图像与背景不同的部分,正是这个部分将主体突出显示,基于该理论,我们给出了下面阈值化轮廓提取算法,该算法已在数学上证明当像素点满足正态分布时所求解是最优的。 Canny 的原理:
Sobel边缘检测算子
经典边缘检测算子比较 一 各种经典边缘检测算子原理简介 图像的边缘对人的视觉具有重要的意义,一般而言,当人们看一个有边缘的物体时,首先感觉到的便是边缘。灰度或结构等信息的突变处称为边缘。边缘是一个区域的结束,也是另一个区域的开始,利用该特征可以分割图像。需要指出的是,检测出的边缘并不等同于实际目标的真实边缘。由于图像数据时二维的,而实际物体是三维的,从三维到二维的投影必然会造成信息的丢失,再加上成像过程中的光照不均和噪声等因素的影响,使得有边缘的地方不一定能被检测出来,而检测出的边缘也不一定代表实际边缘。图像的边缘有方向和幅度两个属性,沿边缘方向像素变化平缓,垂直于边缘方向像素变化剧烈。边缘上的这种变化可以用微分算子检测出来,通常用一阶或两阶导数来检测边缘,如下图所以。不同的是一阶导数认为最大值对应边缘位置,而二阶导数则以过零点对应边缘位置。 (a )图像灰度变化 (b )一阶导数 (c )二阶导数 基于一阶导数的边缘检测算子包括Roberts 算子、Sobel 算子、Prewitt 算子等,在算法实现过程中,通过22?(Roberts 算子)或者33?模板作为核与图像中的每个像素点做卷积和运算,然后选取合适的阈值以提取边缘。拉普拉斯边缘检测算子是基于二阶导数的边缘检测算子,该算子对噪声敏感。一种改进方式是先对图像进行平滑处理,然后再应用二阶导数的边缘检测算子,其代表是LOG 算子。前边介绍的边缘检测算子法是基于微分方法的,其依据是图像的边缘对应一阶导数的极大值点和二阶导数的过零点。Canny 算子是另外一类边缘检测算子,它不是通过微分算子检测边缘,而是在满足一定约束条件下推导出的边缘检测最优化算子。 1 Roberts (罗伯特)边缘检测算子 景物的边缘总是以图像中强度的突变形式出现的,所以景物边缘包含着大量的信息。由于景物的边缘具有十分复杂的形态,因此,最常用的边缘检测方法是所谓的“梯度检测法”。 设(,)f x y 是图像灰度分布函数; (,)s x y 是图像边缘的梯度值;(,)x y ?是梯度的方向。则有 [][]{} 1 2 22 (,)(,)(,)(,)(,)s x y f x n y f x y f x y n f x y = +-++- (1) (n=1,2,...) [][]{}1 (,)tan (,)(,)/(,)(,)x y f x y n f x y f x n y f x y ?-=+-+- (2)
实验三图像分割与边缘检测
数字图像处理实验报告 学生姓名王真颖 学生学号L0902150101 指导教师梁毅雄 专业班级计算机科学与技术1501 完成日期2017年11月06日
计算机科学与技术系信息科学与工程学院
目录 实验一.................................................................................................. 错误!未定义书签。 一、实验目的.................................................................................................... 错误!未定义书签。 二、实验基本原理 ........................................................................................... 错误!未定义书签。 三、实验内容与要求....................................................................................... 错误!未定义书签。 四、实验结果与分析....................................................................................... 错误!未定义书签。实验总结............................................................................................... 错误!未定义书签。参考资料.. (3) 实验一图像分割与边缘检测 一.实验目的 1. 理解图像分割的基本概念; 2. 理解图像边缘提取的基本概念; 3. 掌握进行边缘提取的基本方法;
canny边缘检测算法代码
canny算子代码 void CreatGauss(double sigma, double **pdKernel, int *pnWidowSize); void GaussianSmooth(SIZE sz, LPBYTE pGray, LPBYTE pResult, double sigma); void Grad(SIZE sz, LPBYTE pGray, int *pGradX, int *pGradY, int *pMag); void NonmaxSuppress(int *pMag, int *pGradX, int *pGradY, SIZE sz, LPBYTE pNSRst); void EstimateThreshold(int *pMag, SIZE sz, int *pThrHigh, int *pThrLow, LPBYTE pGray, double dRatHigh, double dRatLow); void Hysteresis(int *pMag, SIZE sz, double dRatLow, double dRatHigh, LPBYTE pResult); void TraceEdge(int y, int x, int nThrLow, LPBYTE pResult, int *pMag, SIZE sz); void Canny(LPBYTE pGray, SIZE sz, double sigma, double dRatLow, double dRatHigh, LPBYTE pResult); #include "afx.h" #include "math.h" #include "canny.h" // 一维高斯分布函数,用于平滑函数中生成的高斯滤波系数 void CreatGauss(double sigma, double **pdKernel, int *pnWidowSize) { LONG i; //数组中心点 int nCenter; //数组中一点到中心点距离 double dDis; //中间变量 double dValue;
图像边缘检测方法的研究与实现刘法200832800066
图像边缘检测方法的研究与实现刘法200832800066
青岛大学专业课程设计 院系: 自动化学院 专业: 电子信息工程 班级: 08级电子信息工程3班学生姓名: 刘法 指导教师: 王汉萍庄晓东 日期: 2011年12月23日
题目:图像边缘检测方法的研究与实现 一、边缘检测以及相关概念 1.1边缘,边缘检测的介绍 边缘(edge)是指图像局部强度变化最显著的部分.边缘主要存在于目标与目标、目标与背景、区域与区域(包括不同色彩)之间,是图像分割、纹理特征和形状特征等图像分析的重要基础.图像分析和理解的第一步常常是边缘检测(edge detection). 边缘检测是指使用数学方法提取图像像元中具有亮度值(灰度)空间方向梯度大的边、线特征的过程。 在讨论边缘算子之前,首先给出一些术语的定义: 边缘点:图像中具有坐标] ,[j i且处在强度显著变化的位置上的点.边缘段:对应于边缘点坐标] i及其方位 ,边缘的方位可能是梯度角. ,[j 边缘检测器:从图像中抽取边缘(边缘点和边缘段)集合的算法. 轮廓:边缘列表,或是一条表示边缘列表的拟合曲线. 边缘连接:从无序边缘表形成有序边缘表的过程.习惯上边缘的表示采用顺时针方向序. 边缘跟踪:一个用来确定轮廊的图像(指滤波后的图像)搜索过程. 边缘点的坐标可以是边缘位置像素点的行、列整数标号,也可以在子像素分辨率水平上表示.边缘坐标可以在原始图像坐标系上表示,但大多数情况下是在边缘检测滤波器的输出图像的坐标系上表示,因为滤波过程可能导致图像坐标平移或缩放.边缘段可以用像素点尺寸大小的小线段定义,或用具有方位属性的一个点定义.请注意,在实际中,边缘点和边缘段都被称为边缘.边缘连接和边缘跟踪之间的区别在于:边缘连接是把边缘检测器产生的无序边缘集作为输入,输出一个有序边缘集;边缘跟踪则是将一幅图像作为输入,输出一个有序边缘集.另外,边缘检测使用局部信息来决定边缘,而边缘跟踪使用整个图像信息来决定一个像素点是不是边缘. 1.2 边缘检测算子 边缘检测是图像特征提取的重要技术之一, 边缘常常意味着一个区域的终结和另一个区域的开始. 图像的边缘包含了物体形状的重要信息,它不仅在分析图像时大幅度地减少了要处理的信息量,而且还保护了目标的边界结构. 因此,边缘检测可以看做是处理许多复杂问题的关键. 边缘检测的实质是采用某种算法来提取出图像中对对象与背景间的交界线。图像灰度的变化情况可以用图像灰度分布的梯度来反映,因此可以用局部图像微分技术来获取边缘检测算子。经典的边缘检测方法是对原始图像中的像素的某个邻域来构造边缘检测算子。以下是对几种经典的边缘检测算子进行理论分析,并对各自的性能特点做出比较和评价。 边缘检测的原理是:由于微分算子具有突出灰度变化的作用,对图像进行微分运算,在图像边缘处其灰度变化较大,故该处微分计算值教高,可将这些微分值作为相应点的边缘强度,通过阈值判别来提取边缘点,即如果微分值大于阈值,则为边缘点。
边缘检测算子比较
边缘检测算子比较 不同图像灰度不同,边界处一般会有明显的边缘,利用此特征可以分割图像。需要说明的是:边缘和物体间的边界并不等同,边缘指的是图像中像素的值有突变的地方,而物体间的边界指的是现实场景中的存在于物体之间的边界。有可能有边缘的地方并非边界,也有可能边界的地方并无边缘,因为现实世界中的物体是三维的,而图像只具有二维信息,从三维到二维的投影成像不可避免的会丢失一部分信息;另外,成像过程中的光照和噪声也是不可避免的重要因素。正是因为这些原因,基于边缘的图像分割仍然是当前图像研究中的世界级难题,目前研究者正在试图在边缘提取中加入高层的语义信息。 课题所用图像边缘与边界应该算是等同的。 在实际的图像分割中,往往只用到一阶和二阶导数,虽然,原理上,可以用更高阶的导数,但是,因为噪声的影响,在纯粹二阶的导数操作中就会出现对噪声的敏感现象,三阶以上的导数信息往往失去了应用价值。二阶导数还可以说明灰度突变的类型。在有些情况下,如灰度变化均匀的图像,只利用一阶导数可能找不到边界,此时二阶导数就能提供很有用的信息。二阶导数对噪声也比较敏感,解决的方法是先对图像进行平滑滤波,消除部分噪声,再进行边缘检测。不过,利用二阶导数信息的算法是基于过零检测的,因此得到的边缘点数比较少,有利于后继的处理和识别工作。 各种算子的存在就是对这种导数分割原理进行的实例化计算,是为了在计算过程中直接使用的一种计算单位; Roberts算子:边缘定位准,但是对噪声敏感。适用于边缘明显且噪声较少的图像分割。Roberts边缘检测算子是一种利用局部差分算子寻找边缘的算子,Robert算子图像处理后结果边缘不是很平滑。经分析,由于Robert算子通常会在图像边缘附近的区域内产生较宽的响应,故采用上述算子检测的边缘图像常需做细化处理,边缘定位的精度不是很高。Prewitt算子:对噪声有抑制作用,抑制噪声的原理是通过像素平均,但是像素平均相当于对图像的低通滤波,所以Prewitt算子对边缘的定位不如Roberts算子。 Sobel算子:Sobel算子和Prewitt算子都是加权平均,但是Sobel算子认为,邻域的像素对当前像素产生的影响不是等价的,所以距离不同的像素具有不同的权值,对算子结果产生的影响也不同。一般来说,距离越远,产生的影响越小。 Isotropic Sobel算子:加权平均算子,权值反比于邻点与中心点的距离,当沿不同方向检测边缘时梯度幅度一致,就是通常所说的各向同性。 在边沿检测中,常用的一种模板是Sobel 算子。Sobel 算子有两个,一个是检测水平边沿的;另一个是检测垂直平边沿的。Sobel算子另一种形式是各向同性Sobel(Isotropic Sobel)算子,也有两个,一个是检测水平边沿的,另一个是检测垂直平边沿的。各向同性Sobel 算子和普通Sobel算子相比,它的位置加权系数更为准确,在检测不同方向的边沿时梯度的幅度一致。由于建筑物图像的特殊性,我们可以发现,处理该类型图像轮廓时,并不需要对梯度方向进行运算,所以程序并没有给出各向同性Sobel算子的处理方法。 由于Sobel算子是滤波算子的形式,用于提取边缘,可以利用快速卷积函数,简单有效,因此应用广泛。美中不足的是,Sobel算子并没有将图像的主体与背景严格地区分开来,换言之就是Sobel算子没有基于图像灰度进行处理,由于Sobel算子没有严格地模拟人的视觉生理特征,所以提取的图像轮廓有时并不能令人满意。在观测一幅图像的时候,我们往往首先注意的是图像与背景不同的部分,正是这个部分将主体突出显示,基于该理论,我们可以给出阈值化轮廓提取算法,该算法已在数学上证明当像素点满足正态分布时所求解是最优的。
sobel算子边缘检测
源程序如下:#include
图像边缘检测技术综述
第 42 卷增刊 1 中南大学学报(自然科学版) V ol.42 Suppl. 1 2011 年 9 月 Journal of Central South University (Science and Technology) Sep. 2011 图像边缘检测技术综述 王敏杰 1 ,杨唐文 1, 3 ,韩建达 2 ,秦勇 3 (1. 北京交通大学 信息科学研究所,北京,100044; 2. 中国科学院沈阳自动化研究所 机器人学国家重点实验室,辽宁 沈阳,110016; 3. 北京交通大学 轨道交通控制与安全国家重点实验室,北京,100044) 摘要:边缘检测是图像处理与分析中最基础的内容之一。首先介绍了几种经典的边缘检测方法,并对其性能进行 比较分析;然后,综述了近几年来出现的一些新的边缘检测方法;最后,对边缘检测技术的发展趋势进行了展望。 关键词:数字图像;边缘检测;综述 中图分类号:TP391.4 文献标志码:A 文章编号:1672?7207(2011)S1?0811?06 Review on image edge detection technologies W ANG Min-jie 1 , Y ANG Tang-wen 1,3 , HAN Jian-da 2 ,QIN Y ong 3 (1.Institute of Information Science,Beijing Jiaotong University, Beijing 100044, China? 2.State Key Laboratory of Robotics, Shenyang Institute of Automation, Chinese Academic of Science,Shenyang 110016, China? 3.State Key Laboratory of Rail Traffic Control and Safety, Beijing Jiaotong University, Beijing 100044, China) Abstract: Edge detection is one of the most fundamental topics in the research area of image processing and analysis. First, several classical edge detection methods were introduced, and the performance of these methods was compared? then, several edge detection methods developed in the latest years were reviewed? finally, the trend of the research of the image edge detection in the future was discussed. Key words:digital image?edge detection?review 图像是人们从客观世界获取信息的重要来源 [1?2] 。 图像信息最主要来自其边缘和轮廓。所谓边缘是指其 周围像素灰度急剧变化的那些象素的集合,它是图像 最基本的特征。边缘存在于目标、背景和区域之 间 [3?4] ,它是图像分割所依赖的最重要的依据。边缘检 测 [5?8] 是图像处理和计算机视觉中的基本问题, 图像边 缘检测是图像处理中的一个重要内容和步骤,是图像 分割、目标识别等众多图像处理的必要基础 [9?10] 。因 此,研究图像边缘检测算法具有极其重要的意义。 边缘检测是计算机视觉和图像处理领域的一项基 本内容。准确、高效地提取出边缘信息一直是该领域 研究的重点内容 [11] 。最初的经典算法可分为边缘算子 法、曲面拟合法、模板匹配法、门限化法等。近年来, 随着数学理论和人工智能的发展,又出现了一些新的 边缘检测的算法 [12?13] ,如基于数学形态学的边缘检 测 [14] 、小波变换和小波包变换的边缘检测法 [15] 、基于 模糊理论的边缘检测法 [16?17] 、基于神经网络的边缘检 测法 [18] 、基于分形几何的边缘检测算法 [19] 、基于遗传 算法的边缘检测法 [20?21] 、漫射边缘的检测方法 [22] 、多 尺度边缘检测技术 [23] 、亚像素边缘的定位技术 [24] 、 收稿日期:2011?04?15;修回日期:2011?06?15 基金项目:轨道交通控制与安全国家重点实验室开放基金资助项目(RCS2010K02);机器人学国家重点实验室开放基金资助项目(RLO200801);北 京交通大学基本科研业务费资助项目(2011JBM019) 通信作者:王敏杰(1988-), 女, 黑龙江五常人, 硕士研究生, 从事图像处理和计算机视觉研究; 电话: 010-51468132; E-mail: wangminjie1118@https://www.360docs.net/doc/6917950546.html,
Canny边缘检测
Canny边缘检测 图象的边缘是指图象局部区域亮度变化显著的部分,该区域的灰度剖面一般可以看作是一个阶跃,既从一个灰度值在很小的缓冲区域内急剧变化到另一个灰度相差较大的灰度值。图象的边缘部分集中了图象的大部分信息,图象边缘的确定与提取对于整个图象场景的识别与理解是非常重要的,同时也是图象分割所依赖的重要特征,边缘检测主要是图象的灰度变化的度量、检测和定位,自从1959提出边缘检测以来,经过五十多年的发展,已有许多中不同的边缘检测方法。根据作者的理解和实践,本文对边缘检测的原理进行了描述,在此基础上着重对Canny检测算法的实现进行详述。 本文所述内容均由编程验证而来,在实现过程中,有任何错误或者不足之处大家共同讨论(本文不讲述枯燥的理论证明和数学推导,仅仅从算法的实现以及改进上进行原理性和工程化的描述)。 1、边缘检测原理及步骤 在之前的博文中,作者从一维函数的跃变检测开始,循序渐进的对二维图像边缘检测的基本原理进行了通俗化的描述。结论是:实现图像的边缘检测,就是要用离散化梯度逼近函数根据二维灰度矩阵梯度向量来寻找图像灰度矩阵的灰度跃变位置,然后在图像中将这些位置的点连起来就构成了所谓的图像边缘(图像边缘在这里是一个统称,包括了二维图像上的边缘、角点、纹理等基元图)。 在实际情况中理想的灰度阶跃及其线条边缘图像是很少见到的,同时大多数的传感器件具有低频滤波特性,这样会使得阶跃边缘变为斜坡性边缘,看起来其中的强度变化不是瞬间的,而是跨越了一定的距离。这就使得在边缘检测中首先要进行的工作是滤波。 1)滤波:边缘检测的算法主要是基于图像强度的一阶和二阶导数,但导数通常对噪声很敏感,因此必须采用滤波器来改善与噪声有关的边缘检测器的性能。常见的滤波方法主要有高斯滤波,即采用离散化的高斯函数产生一组归一化的高斯核(具体见“高斯滤波原理及其编程离散化实现方法”一文),然后基于高斯核函数对图像灰度矩阵的每一点进行加权求和(具体程序实现见下文)。 2)增强:增强边缘的基础是确定图像各点邻域强度的变化值。增强算法可以将图像灰度点邻域强度值有显著变化的点凸显出来。在具体编程实现时,可通过计算梯度幅值来确定。
图像边缘检测算子
课程设计任务书 学院信息科学与工程专业电子信息工程 学生姓名*** 班级学号09******* 课程设计题目图像边缘检测算子 课程设计目的与要求: 设计目的: 1.熟悉几种经典图像边缘检测算子的基本原理。 2.用Matlab编程实现边缘检测,比较不同边缘检测算子的实验结果。设计要求: 1.上述实验内容相应程序清单,并加上相应的注释。 2.完成目的内容相应图像,并提交原始图像。 3.用理论对实验内容进行分析。 工作计划与进度安排: 2012年 06月29 日选题目查阅资料 2012年 06月30 日编写软件源程序或建立仿真模块图 2012年 07月01 日调试程序或仿真模型 2012年 07月01 日结果分析及验收 2012年 07月02 日撰写课程设计报告、答辩 指导教师: 2012年 6月29日专业负责人: 2012年 6月29日 学院教学副院长: 2012年 6月29日
摘要 边缘检测是数字图像处理中的一项重要内容。本文对图像边缘检测的几种经典算法(Roberts算子、Sobel算子、Prewitt算子)进行了分析和比较,并用MATLAB实现这几个算法。最后通过实例图像对不同边缘检测算法的效果进行分析,比较了不同算法的特点和适用范围。 关键词:图像处理;边缘检测;Roberts算子;Sobel算子;Prewitt算子
目录 第1章相关知识.................................................................................................... IV 1.1 理论背景 (1) 1.2 数字图像边缘检测意义 (1) 第2章课程设计分析 (3) 2.1 Roberts(罗伯特)边缘检测算子 (3) 2.2 Prewitt(普瑞维特)边缘检测算子 (4) 2.3 Sobel(索贝尔)边缘检测算子 (5) 第3章仿真及结果分析 (7) 3.1 仿真 (7) 3.2 结果分析 (8) 结论 (10) 参考文献 (11)
图像边缘检测方法的研究与实现刘法200832800066
青岛大学 专业课程设计 院系: 自动化学院 专业: 电子信息工程 班级: 08级电子信息工程3班 学生姓名: 刘法 指导教师: 王汉萍庄晓东 日期: 2011年12月23日 题目:图像边缘检测方法的研究与实现 一、边缘检测以及相关概念 1.1边缘,边缘检测的介绍 边缘(edge)是指图像局部强度变化最显著的部分.边缘主要存在于目标与目标、目标与背景、区域与区域(包括不同色彩)之间,是图像分割、纹理特征和形状特征等图像分析的重要基础.图像分析和理解的第一步常常是边缘检测(edge detection). 边缘检测是指使用数学方法提取图像像元中具有亮度值(灰度)空间方向梯度大的边、线特征的过程。 在讨论边缘算子之前,首先给出一些术语的定义: 边缘点:图像中具有坐标] i且处在强度显著变化的位置上的点. ,[j 边缘段:对应于边缘点坐标] i及其方位 ,边缘的方位可能是梯度角. ,[j 边缘检测器:从图像中抽取边缘(边缘点和边缘段)集合的算法. 轮廓:边缘列表,或是一条表示边缘列表的拟合曲线. 边缘连接:从无序边缘表形成有序边缘表的过程.习惯上边缘的表示采用顺时针方向序. 边缘跟踪:一个用来确定轮廊的图像(指滤波后的图像)搜索过程. 边缘点的坐标可以是边缘位置像素点的行、列整数标号,也可以在子像素分辨率水平上表示.边缘坐标可以在原始图像坐标系上表示,但大多数情况下是在边缘检测滤波器的输出图像的坐标系上表示,因为滤波过程可能导致图像坐标平移或缩放.边缘段可以用像素点尺寸大小的小线段定义,或用具有方位属性的一个点定义.请注意,在实际中,边缘点和边缘段都被称为边缘.
边缘连接和边缘跟踪之间的区别在于:边缘连接是把边缘检测器产生的无序边缘集作为输入,输出一个有序边缘集;边缘跟踪则是将一幅图像作为输入,输出一个有序边缘集.另外,边缘检测使用局部信息来决定边缘,而边缘跟踪使用整个图像信息来决定一个像素点是不是边缘. 1.2 边缘检测算子 边缘检测是图像特征提取的重要技术之一, 边缘常常意味着一个区域的终结和另一个区域的开始. 图像的边缘包含了物体形状的重要信息,它不仅在分析图像时大幅度地减少了要处理的信息量,而且还保护了目标的边界结构. 因此,边缘检测可以看做是处理许多复杂问题的关键. 边缘检测的实质是采用某种算法来提取出图像中对对象与背景间的交界线。图像灰度的变化情况可以用图像灰度分布的梯度来反映,因此可以用局部图像微分技术来获取边缘检测算子。经典的边缘检测方法是对原始图像中的像素的某个邻域来构造边缘检测算子。以下是对几种经典的边缘检测算子进行理论分析,并对各自的性能特点做出比较和评价。 边缘检测的原理是:由于微分算子具有突出灰度变化的作用,对图像进行微分运算,在图像边缘处其灰度变化较大,故该处微分计算值教高,可将这些微分值作为相应点的边缘强度,通过阈值判别来提取边缘点,即如果微分值大于阈值,则为边缘点。 Roberts,Sobel,Prewwit是基于一阶导数的边缘检测算子,图像的边缘检测是通过2*2或者3*3模板作为核与该图像中的每个像素点做卷积和运算,然后选取合适的阈值以提取边缘。 Laplace边缘检测算子是基于二阶导数的边缘检测算子,该算子对噪声敏感。Laplace算子的改进方式是先对图像进行平滑处理,然后再应用二阶导数的边缘检测算子,其代表是拉普拉斯高斯(LOG)算子。前边介绍的边缘检测算法是基于微分方法的,其依据是图像的边缘对应一阶导数的极大值点和二阶导数过零点。Canny算子是另外一类边缘检测算子,它不是通过微分算子检测边缘,而是在满足一定约束条件下推导出的边缘检测最优化算子。 1.3 边缘检测算法 对于边缘的检测常常借助于空域微分算子进行,通过将其模板与图像卷积完成。两个具有不同灰度值的相邻区域之间总存在灰度边缘。灰度边缘是灰度值不连续(或突变) 的结果,这种不连续常可利用求一阶和二阶导数方便地检测到。已有的局部技术边缘检测方法,主要有一次微分(Sobel 算子、Robert s 算子等) 、二次微分(拉普拉斯算子等)。这些边缘检测器对边缘灰度值过渡比较尖锐且噪声较小等不太复杂的图像,大多数提取算法均可以取得较好的效果。但对于边缘复杂、采光不均匀的图像来说,则效果不太理想。主要表现为边缘模糊、边缘非单像素宽、弱边缘丢失和整体边缘的不连续等方面。 用算子检测图像边缘的方法是用小区域模板对图像进行处理,即采用卷积核作为掩模模板在图像中依次移动,完成图像中每个像素点同模板的卷积运算,最终输出的边缘幅度结果可以检测出图像的边缘。卷积运算是一种邻域运算。图像处理认为:某一点像素的结果不但和本像素灰度有关,而且和其邻域点值有关。运用模板在图像上依此对每一个像素进行卷积, 即模板上每一个点的值与其在图像上当前位置对应的像素点值相乘后再相加,得出的值就是该点处理后的新值。 边缘检测算法有如下四个步骤: