汽车半主动悬架系统研究进展_方子帆
文章编号:1000-582X(2003)01-0104-05
汽车半主动悬架系统研究进展
方子帆,邓兆祥,郑 玲,舒红宇
(重庆大学机械传动国家重点实验室,重庆400044)
摘 要:基于系统工程理论,论述了汽车半主动悬架系统的研究和动态,分析了目前电磁流变液减振液的研究及减振器开发现状。在分析了一些较为成功的半主动悬架控制策略的基础上,论述了经典控制、线性最优控制、自适应控制和智能控制方法在半主动悬架系统中的应用前景,提出了基于天棚阻尼控制理论、模糊控制理论和自适应控制理论为主线的复合控制策略。此外,提出了基于磁流变液减振器的半主动悬架系统研究与开发的整体思路,探讨了值得研究的若干理论和应用问题。
关键词:汽车;半主动悬架;电流变液体;磁流变液体;减振器
中图分类号:U463.1文献标识码:A
现代汽车正朝着安全、智能化和清洁化的方向发展。悬架系统智能化解决了传统被动悬架存在的舒适性和稳定性不能兼顾的问题,并能适应变化的行驶工况和任意道路激励,代表了悬架系统发展的方向。主动悬架能获得一个优质的隔振系统,实现理想悬架的控制目标,但能量消耗大,成本高,结构复杂。能量、成本和可靠性是限制主动悬架发展的瓶颈。半主动悬架通过改变减振器的阻尼特性适应不同的道路和行驶状况的需要,改善乘坐舒适性和操纵稳定性。由于半主动悬架在控制品质上接近于主动悬架,且结构简单,无须力源,能量损耗小,因而是近期最有可能走向市场推广应用的新兴技术。
1 半主动悬架技术发展状况
1974年,Crosby和Karnop基于天棚阻尼的概念发明了半主动阻尼器[1]。其生产应用始于80年代,但它对悬架性能的改善是极有限的。1975年,Margolis等人提出了“开关”控制的半主动悬架,它能产生较大的阻尼力这种悬架已应用到实车上。1986年,Kim brough 在半主动悬架控制方法中引入了Lyapunov方法,改进了控制算法的稳定性。1988年,日产公司研制了一种“声纳”式半主动悬架,它可通过声纳装置预测路面信息,悬架减振器有“柔和”、“适中”和“稳定”3种选择状态。1994年,Prinkos等人使用了电流变和磁流变流体作为工作介质,研究了新型半主动悬架系统。
半主动悬架系统除了少量的开启电液阀的能量以外,几乎不需要外加能源。研究表明:只要合适选择控制逻辑,半主动阻尼器可以达到像主动减振一样的减振效果[2]。
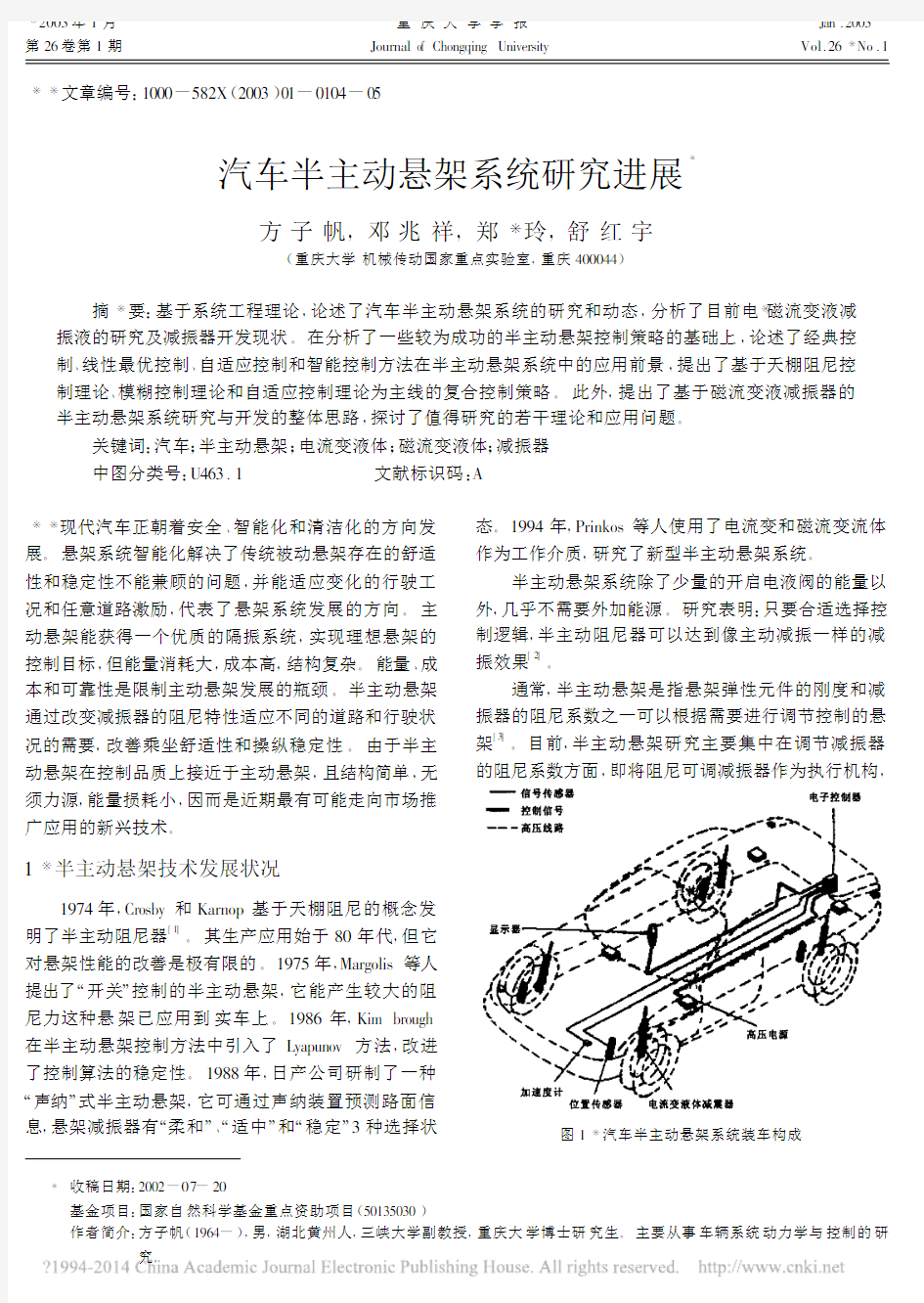
通常,半主动悬架是指悬架弹性元件的刚度和减振器的阻尼系数之一可以根据需要进行调节控制的悬架[3]。目前,半主动悬架研究主要集中在调节减振器的阻尼系数方面,即将阻尼可调减振器作为执行机构
,
图1 汽车半主动悬架系统装车构成
2003年1月重庆大学学报Jan.2003第26卷第1期Journal of Chongqing University Vol.26 No.1
收稿日期:2002-07-20
基金项目:国家自然科学基金重点资助项目(50135030)
作者简介:方子帆(1964-),男,湖北黄州人,三峡大学副教授,重庆大学博士研究生。主要从事车辆系统动力学与控制的研究。
通过传感器检测到的汽车行驶状况和道路条件的变化以及车身的加速度,由E CU根据控制策略发出脉冲控制信号,实现对减振器阻尼系数的有级可调或无级可调。典型的半主动悬架系统组成如图1所示。
1.1 有级可调减振器
有级可调减振器阻尼可在2-3档之间快速切换,切换时间通常为10~20ms。有级可调减振器实际上是在减振器结构中采用较为简单的控制阀,使通流面积在最大、中等或最小之间进行有级调节。有级可调减振器通过减振器顶部的电机控制旋转阀的旋转位置,使减振器的阻尼在“软、中、硬”三档之间变化。有级可调减振器的结构及其控制系统相对简单,但在适应汽车行驶工况和道路条件的变化方面有一定的局限性。有级可调减振器的设计关键是发展先进的阀技术,增加阻尼变化的档数,缩短切换时间,从而使复杂的控制策略应用成为可能,以进一步提高悬架的控制品质。
2.2 无级可调减振器
无级可调减振器的阻尼调节可采取以下2种方式:
1)节流孔径调节
通过步进电机驱动减振器的阀杆,连续调节减振器节流阀的通流面积来改变阻尼,节流阀可采用电磁阀或其它形式的驱动阀来实现。这类减振器的主要问题是:节流阀结构复杂,制造成本高。
2)减振液粘性调节
使用粘性连续可控的新型的功能材料电流变或磁流变液体[4-6]作为减振液,从而实现阻尼无级变化。电流变液体在外加电场作用下,其流变材料性能,如剪切强度、表观粘度等会发生显著的变化,将这种电流变液体装入减振器,并在内外筒之间加上电场,通过改变电场强度,使电流变液体的粘度改变,从而改变减振器的阻尼力。
由于电流变减振器的阻尼可随电场强度的改变而连续变化,无须高精度的节流阀,结构简单,制造成本不高,且无液压阀的振动、冲击与噪声,不需要复杂的驱动机构,作为半主动悬架的执行器是一个非常好的选择。
但电流变液体存在较多问题,其电致屈服强度小,温度工作范围不宽,零电场粘度偏高,悬浮液中固体颗粒与基础液体之间比重相差较大,易分离、沉降,稳定性差,对杂质敏感,难以适应电流变减振器长期稳定工作的需要。
要使电流变减振器响应迅速、工作可靠,必须解决以下几个问题:①设计一个体积小、重量轻、能任意调节的高压电源;②为保证电流变液体的正常工作温度,必须设计一个散热系统;③充装电流变液体时,要保证无污染;④性能优良的电流变液体;⑤高压电源的绝缘与封装。
电流变减振器,国外已有一些产品问世[7]。如德国Ba yer公司的商业电流变液与电流变减振器,美国Lord公司的几种电流变减振器等。
磁流变液体是指在外加磁场的作用下,流变材料性能发生急剧变化的流体。将磁流变液体装入磁流变减振器,通过控制磁场强度,可实现磁流变减振器阻尼的连续、无级可调。
磁流变减振器具有电流变减振器同样的特点,响应比电流变减振器要慢,主要是磁流变液体的磁化和退磁需要时间。磁流变减振器通常采用活塞缸结构,磁流变液的通路由位于活塞上的阻尼孔或单独的旁路构成,在磁流变液的通路上施加磁场。按结构可分为单出杆活塞缸结构和双出杆活塞缸结构。
在磁流变液和器件的开发方面,美国Lord公司、福特公司,德国B ASF等纷纷投入巨资,已有商业磁流变液及器件问世[8]。如Lord公司开发了商业磁流变液MRX-126PD,采用单出杆活塞缸结构设计的磁流变减振器已用于大型载重汽车司机座椅半主动悬架减振系统。
磁流变减振器存在的问题是响应时间较长,结构比较笨重,流变性能和稳定性还需改进。
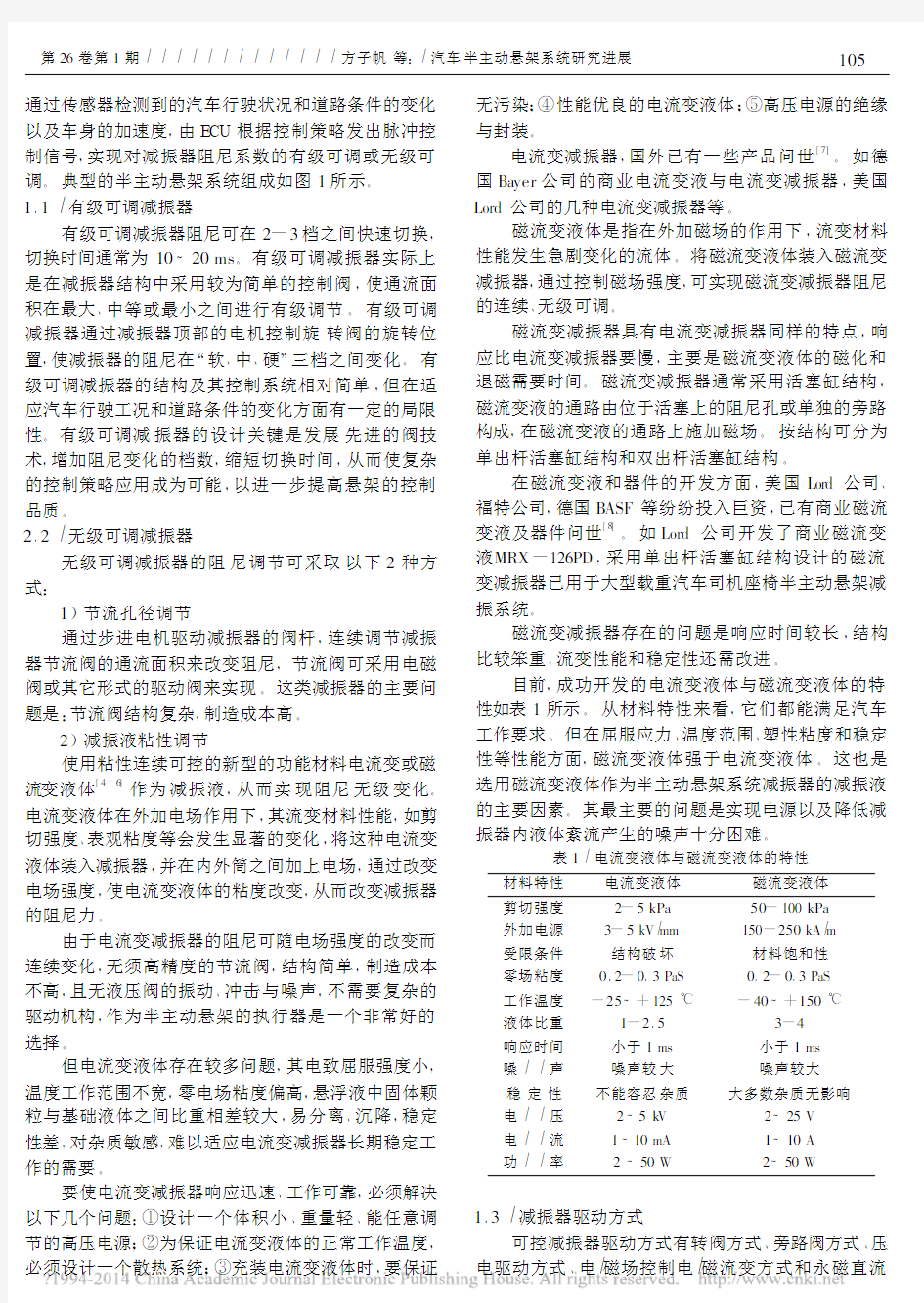
目前,成功开发的电流变液体与磁流变液体的特性如表1所示。从材料特性来看,它们都能满足汽车工作要求。但在屈服应力、温度范围、塑性粘度和稳定性等性能方面,磁流变液体强于电流变液体。这也是选用磁流变液体作为半主动悬架系统减振器的减振液的主要因素。其最主要的问题是实现电源以及降低减振器内液体紊流产生的噪声十分困难。
表1 电流变液体与磁流变液体的特性
材料特性电流变液体磁流变液体
剪切强度2-5kPa50-100kPa
外加电源3-5kV mm150-250kA m
受限条件结构破坏材料饱和性
零场粘度0.2-0.3PaS0.2-0.3PaS
工作温度-25~+125℃-40~+150℃
液体比重1-2.53-4
响应时间小于1ms小于1ms
噪 声噪声较大噪声较大
稳定性不能容忍杂质大多数杂质无影响
电 压2~5k V2~25V
电 流1~10mA1~10A
功 率2~50W2~50W
1.3 减振器驱动方式
可控减振器驱动方式有转阀方式、旁路阀方式、压电驱动方式、电磁场控制电磁流变方式和永磁直流
105
第26卷第1期 方子帆等: 汽车半主动悬架系统研究进展
直线伺服电机驱动方式等。
转阀方式是由控制器单元发出的信号经处理驱动步进电机,从而驱动转阀转动,改变减振器阻尼孔的大小,产生符合系统要求变化的阻尼力。
旁路阀方式是由电磁阀根据控制器单元发出的信号开关,打开磁阀,相当于在油路中增加一个节流孔,从而改变总的阻尼孔面积,产生符合系统要求的有级变化的阻尼力。
压电驱动方式是在减振器的活塞杆内,安装压电执行器和压电传感器。压电执行器由88个压电元件叠加而成,在500V直流电压作用下,压电元件会伸长50μm,该位移经位移放大室放大到2mm,可打开转换阀,形成分流油路,从而获得小阻尼。利用压电传感器可将前轮减振器检测到的路面情况传给ECU,控制后轮减振器的阻尼。
磁场控制的磁流变方式是利用ECU发出的电压或电流信号控制磁流变减振器内变压线卷,产生高压实现对阻尼的连续无级调节。
永磁直流直线伺服电机驱动方式是由直线伺服电机直接实现直线运动控制。电机驱动效率高,响应速度快,灵敏度高,随机性好,控制稳定。目前,永磁直流直线伺服电机在航天飞行器中广泛应用,其驱动性能优于液压执行机构。
2 半主动悬架控制策略
最早提出半主动悬架控制方法是天棚阻尼控制方法,由于其控制算法简单,得到了广泛的应用。但天棚阻尼控制只解决了悬架系统的舒适性而没有很好解决操纵稳定性问题。因此,目前研究的重点是改进型的天棚阻尼控制方法[9-10]在半主动悬架系统的应用。
以经典控制理论为基础的PID控制不需要了解被控对象的数学模型,只要根据经验进行调节器参数在线调整,即可取得满意的结果,不足的是对被控对象参数变化比较敏感。研究查表法变参数PID控制和模糊PID控制方法在半主动悬架控制系统中应用有一定的实际的意义。
线性最优控制方法在系统建模时,忽略了高阶动态环节,如车架、轮胎的高阶模态以及减振器、传感器的动态特性等,所得到的控制参数是根据确定的系统参数计算出来的,仅对理想的数学模型保证预期的性能[11]。当系统参数变化到一定程度时,会使系统变得不稳定,控制参数不再使性能指标最优,有时甚至会使悬架性能恶化[12]。实际的悬架系统是含有许多不确定因素的非线性、时变、高阶动力系统,难以用定常反馈系统达到预定的性能要求[13]。所以最优控制方法在半主动悬架控制系统中应用很少。
自适应控制方法应用于汽车悬架控制系统有自校正控制和模型参考自适应控制两类控制策略。自校正控制是一种将受控对象参数在线识别与控制器参数整定相结合的控制方法。模型参考自适应控制是在外界激励条件和车辆自身参数状态发生变化时,被控车辆的振动输出仍能跟踪所选定的理想参考模型。采用自适应控制的车辆悬架阻尼减振系统改善车辆的行驶特性[14],在德国大众汽车公司的底盘上得到了应用。
模糊控制方法在半主动悬架系统中的应用效果比常规控制方法有效[15]。但模糊控制器的稳定性只通过一些模拟过程测试,判断其稳定性的标准还不存在;控制器只适用于一定的汽车参数;改变轮胎性能会使控制结果明显变坏;路面性质对控制效果影响较大。因此,模糊控制方法在半主动悬架控制系统中应用从理论上无法判定,只能通过系统实测才能确定。
神经网络是一个由大量处理单元所组成的高度并行的非线性动力系统,其特点是可学习性和并行性,故在汽车悬架振动控制中有广泛的应用前景。但神经网络不适于表达基于规则的知识,需要较长的训练时间,因此,神经网络须与其它控制方法相结合构成复合控制模式[16]才能具有更大的实际应用。
总之,半主动悬架控制方法较多,各种方法均有利弊,综合应用各种方法开发系统控制器是发展方向。从文献分析看,日本、德国、韩国等汽车发达国家,基本都是基于天棚阻尼控制理论、模糊控制理论[15]和自适应控制理论为主线的复合控制策略。
任何控制系统总存在不可避免的时滞[16],它会导致反馈控制系统预料外的失稳,出现对安全性极为不利的轮跳。文献[16]初步分析了受控悬架系统的稳定性及可能出现的混沌运动。因此,在汽车半主动悬架振动控制系统开发过程中,应该结合实际车型研究和开发控制有效、实用简单、造价合理的控制器,并经过大量的实车测试,才能推广应用。
3 今后研究和开发工作展望
随着相关学科和高新技术的迅猛发展,特别是高效微处理器的普及,使得研究实用的半主动悬架振动控制系统成为现实。因此,今后的目标是研究和开发方向是基于磁流变液体功能材料,开发控制有效、能耗低、造价合理的汽车悬架振动控制系统,并针对车型开发其适用系统。为此,必须解决一些基础性的理论研究问题和实际应用的技术问题。
1)磁流变液可控减振器的研制
开发实用的磁流变液可控减振器,研究各种结构参数对性能的影响规律,优化结构并改善其制造工艺性。
2)磁流变液体的实用性研究
在现有的磁流变液体中选择或改进并验证最佳配
106重庆大学学报 2003年
方。为此,需要进行一系列减振器疲劳寿命实验和实车运行实验,以验证在实际使用条件下磁流变液体的稳定性、可靠性和实用性。
3)汽车状态传感器的开发研究
重点研究车轮跳动和悬架行程位置传感器,而汽车惯性传感器、方向盘转角和车速传感器选用目前已有的传感器。车轮跳动和悬架行程位置传感器采用与可调减振器融为一体的结构方式,以实现高度集成和高可靠性。
4)智能控制器的开发研究
智能控制器集成信号变换、CPU、驱动电路为一体,并同时兼顾汽车其它电子控制系统的功能,为此,必须进行大量的理论和实验研究。要实现最佳的控制目标,控制策略的制定和控制规律、控制软件的实现是关键。为减少反复试验次数,可以采用ADAMS刚体动力学仿真软件,针对半主动悬架的实际使用汽车产品,建立完整的动力学模型,然后模拟汽车行驶的各种工况,选择多种不同的控制策略和控制规律,观察汽车行驶平顺性和稳定性,重点研究控制元器件的响应特性、执行系统的非线性、不确定性和随机性等实际因素的影响,智能控制策略的稳定性,从而制定最佳的控制策略和控制规律,最终再结合实车试验验证。针对特定的汽车产品,选择不同行驶工况进行各种实车试验,以验证半主动悬架的减振效果,验证半主动悬架系统工作的稳定性、可靠性和适应性,并在此基础上进行各个部分改善和改良,最终研制成功基于半主动悬架的新样车。
4 结论和建议
半主动悬架是一种在较短时期就可能被产业化的高新科技产品,在轿车、重型车辆[17-19]和军用车辆[20]上的普及使用比主动悬架更有市场前景。目前,汽车半主动悬架的研究和开发以及产业化受到世界汽车厂商空前的广泛重视。磁流变液研制成功,使减振器液体粘度瞬间可调成为可能,是实现半主动悬架的阻尼可调减振器的理想液体。目前,磁流变液虽然已渐渐进入商品化阶段,但是在实际的减振器上使用还存在一些问题,如温升、耐久性、稳定性等还需进一步实验研究。汽车状态传感和电子控制技术是实现半主动悬架系统另外两个关键。由于现代汽车电子控制应用的逐渐普及,相关技术都有较好的支撑环境,同时有较多的相应的组件可供选择,搭建汽车半主动悬架控制系统不会有太大的困难,但是实现真正的产品转化,需要综合考虑成本和可靠性。
参考文献:
[1] KARNOPP D,CROSBY M,HARWOOD R A.Vibration control
using semi_active force generators[J].ASME Journal of
Engineering for Industry,1974,96(2):619-626.
[2] KIM H,YOON Y S.Semi-active suspension with preview us ing a
frequency_shaped performance index[J].Vehicle Systems
Dynamics,1995,24:759-780.
[3] SHOSHI HID AKA.Adaptive vibration control by a variable-damping
dynamic absorber using ER fluid.AS ME[J].Journal of vibration
and acoustics,1999,121(7):373-378.
[4] ASAKO K.Properties of electrorheol ogical flu ids containing sul fonated
pol y particles[A].Proceedings of th e5th international conference on
electro-rheol ogical fluids,m agnetorheological suspens ions and
ass ociated techn ology[C],1995.342-349.
[5] STANWAY R.Applications of ER fluids in vibration control-a
survey[J].Smart materials and structures,1996,5:464-482.
[6] FILISK O F E.C ompl ex p rop erties and comp os ition of electrorh eological
fluid[J].Journal of Intelligen t Material Sys tems an d Stru cture,1998,9
(8):616-620.
[7] CHOL S B.A semi-active suspension using ER fluid for a
commercial vehicle seat[J].Journal of Intelligent Material
Systems and Structures,1998,9(8):601-606.
[8] CARLSON J https://www.360docs.net/doc/75365618.html,mercial magneto-rheological fluid devices
[A].5th Int.conf.on electro-rheological,magneto-rheological
suspens ions and associated technology sheffield[C],1995. [9] M SERR AND.Implementation of s kyh ook damping feedback control
for the is olation of equipment from base-excited vibration[J].
Proceedings of ACTIVE'99,1999:105-11.
[10] K YI.A new adaptive sky-ook control of vehicle semi-active
suspensions[J].Proc Instn Mech Engrs,Part D,Journal of
Automobile Engineering,1999:213,293-303.
[11] HR OV A T.An ap proach toward the optim al s emi-active s us pensions
[J].T ran s ASME J D yna mic S ystem s Measurem en t con trol,1988,110
(3):288-296.
[12] OSITA D I,NWOKAH.Catastrophes in optimal control[J].
Trans ASME J Dynamic Systems Measurement control,1999,
121(10):577-582.
[13] PALKOVICS.Investigation on stability and possible chaotic motions
in the controlled wheel susp ension s ystem[J].Vehicle s ystem
d ynamics,1992,21:269-296.
[14] A GH AZI ZADEH.Neural network and fuzz y logic application
to vehicle systems:literature survey[J].International of
vehicle design,1997,8(2):132-193.
[15] T YOSHIMUR A.A s emi-active suspension with dynamic absorbers
of ground vehicles using fu zzy reason in g[J].Int J of Vehicle
Design,1997,18(1):19-34.
[16] 张文丰,翁建生,胡海岩.时滞对车辆悬架“天棚”阻尼控
制的影响[J].振动工程学报,1999,12(4):486-491. [17] ZHONGMING XU.Research on improving the ride comfort of
heavy_duty truck[J].Proceedings of IPC2001:124-128. [18] KITCHING K J.Semi_active damping of heavy vehicles[D].
London:Cambridge Univers ity,1997.
[19] KITCHING K J.Performance of a semi_active damper for heavy
vehicles[J].Trans ASME J Dynamic Systems,Measurement
107
第26卷第1期 方子帆等: 汽车半主动悬架系统研究进展
control,2000,122(9):498-506.
[20] MILLER L R.The design and development of a semi-active suspension for a military tank[J].SAE Trans,1988, (881133):5347-5355.
A Review of Recent Advances in Research and Development
on Vehicle Semi_Active Suspension Systems
FANG Zi-fan,DENG Zh ao-xiang,ZHENG Ling,SHU Hong-yu
(State Key Laborator y of Mechanical Transmission,Chongqing University,Chongqing400044,China)
A bstract:Based on the systems engineering theor y,this paper reviews the trend of researches and developments on vehicle semiactive suspension systems,analyzes states of researches on electrorheological fluids and magnetorheological fluids material, and puts forward semi_active suspension sytems based on magnetorheological fluids da mper.On the basis of summing up existing methods for vibration control on semi_active suspension systems,emphases are put on the discussion of aplication of PID control.linear optimal control,adaptive control and intelligent control on the semi_active suspension systems.The compound control strategy is put forward based on the skyhook damping control theory,fuzzy control theor y and adaptive control theory.Moreover,the integral idea about the research and development of semi_active suspension is based on MR damper,and discusses some theories and applied problems deserving research.
Key words:vehicle;se mi_Active suspension;magnetorheological fluids material;electrorheological fluids material;damper
(责任编辑 张小强)
(上接第99页)
A Review on Medical Waste Management and
Treatment in Chongqing Three Gorges Region
HUAN G Ben-sheng,LI Xiao-hong,WANG Li-ao,LIN Jian-we i
(College of Resources&Environment Science,Chongqing University,Chongqing400044,China)
A bstract:Medical waste,belonging to one of top-ronking toxic wastes,should be safely deposed of.The characteristics and har mness of the medical wastes are introduced,and the practical status of medical wastes in Chongqing thr ee gorges region, including waste management and disposal methods,is investigated.Because of the special characteristics of the waste,the paper proposes some measures for managing and separate collection and treatment in the region,including separate collection, sealed transportation,pretreatment,incineration and safe landfill,so that the ecological environment and water resource can be pr otected fr om pollution in the Three Gorges region.
Key words:medical waste;incineration;landfill
(责任编辑 姚 飞) 108重庆大学学报 2003年
汽车悬架的发展历程
汽车悬架的发展历程 汽车的悬架系统是指车身、车架和车轮之间的一个连接结构系统,而这个结构系统包含了避震器、悬架弹簧、防倾杆、悬吊副梁、下控臂、纵向杆、转向节臂、橡皮衬套和连杆等部件。当汽车行驶在路面上时因地面的变化而受到震动及冲击,这些冲击的力量其中一部份会由轮胎吸收,但绝大部分是依靠轮胎与车身间的悬架装置来吸收的。 在汽车的行驶过程中,悬架的作用是弹性的连接车桥和车架,减缓行驶中车辆受到由路面不平引起的冲击力,保证乘坐舒适和货物完好,迅速衰减由于弹性系统引起的振动,传递垂直、纵向、侧向反力及其力矩,并起导向作用,使车轮按照一定轨迹相对车身运动。悬架决定着汽车的稳定性、舒适性和安全性,是现代汽车十分重要的部件之一。 典型的悬架结构由弹性元件、导向机构以及减震器等组成,个别结构则还有缓冲块、横向稳定杆等。弹性元件又有钢板弹簧、空气弹簧、螺旋弹簧以及扭杆弹簧等形式,而现代轿车悬架多采用螺旋弹簧和扭杆弹簧,高档豪华大客车则使用空气弹簧。 悬架的种类和工作原理 根据悬架的阻尼和刚度是否随行驶条件的变化而变化,可分为被动悬架、半主动悬架和主动悬架,半主动悬架还可以按阻尼分为有级式和无级式两类。传统的悬架系统的刚度和阻尼系数,是按经验设计或优化设计方法选择的,一经选定后,在车辆行驶过程中,就无法进行调节,因此其减震性能的进一步提高受到限制,这种悬架成为被动悬架。为了克服被动悬架的缺陷,20世纪60年代提出了主动悬架的概念,主动悬架就是由在悬架系统中采用有源或无源可控制的元件组成。它是一个闭环控制系统,根据车辆的运动状态和路面状况主动作出反应,以抑制车体的运动,使悬架始终处于最优减震状态。所以主动悬架的特点就是能根据外界输入或车辆本身状态的变化进行动态自适应调节。因此系统必须是有源的。半主动悬架则由无源但可控制的阻尼元件组成。 在车辆悬架中,弹性元件除了吸收和贮存能量外,还得承受车身重量及载荷,因此半主动悬架不考虑改变悬架的刚度而只考虑改变悬架的阻尼。由于半主动悬架结构简单,在工作时,几乎不消耗车辆动力,又能获得与主动悬架相近的性能,故应用较广。 由于路面输入的随机性,车辆悬架阻尼的控制属于自适应控制,即所设计的系统在输入或干扰发生大范围的变化时,能自适应环境,调节系统参数,使输出仍能被有效控制,达到设计要求。它不同于一般的反馈控制系统,因为它处理的具有“不确定性”的反馈信息。 自适应控制系统按其原理不同,可分为校正调节器和模型参考自适应控制系统两大类,由于要建立一个精确的“车辆-底面”系统模型还很困难,故目前的主动悬架,多采用自校正调节器。 虽然现代汽车的种类较多,结构差异较大,但一般由弹性元件、减振元件和导向构件组成。工作原理是:当汽车轮胎受到冲击时,弹性元件对冲击进行缓冲,防止对汽车构件和人员造成损伤。但弹性件受到冲击时会产生长时间持续的振动,容易使驾驶员疲劳。故减振元件应快速衰减振动。当车轮受到冲击而跳动时,应使其运动轨迹符合一定的要求,否则会降低汽车行驶时的平顺性和操纵稳定性。导向构件在传力的同时,必须对方向进行控制。
汽车悬架设计毕业论文
汽车悬架设计毕业论文 目录 摘要............................................ 错误!未定义书签。目录............................................................ I 绪论 (1) 1.1汽车悬架概述 (1) 1.2论文研究的背景及意义 (2) 1.3 毕业论文研究容 (2) 第2章汽车悬架概述 (3) 2.1悬架基本概念 (3) 2.1.1悬架概念 (3) 2.1.2悬架最主要的功能 (3) 2.1.3悬架基本组成 (3) 2.1.4悬架类型 (4) 2.2悬架系统研究与设计的领域 (4) 2.3悬架设计要求 (4) 2.4悬架的主要特性 (5) 2.4.1 悬架的垂直弹性特性 (5) 2.4.2 减振器的特性 (6) 2.5 本章小结 (6) 第3章悬架对汽车主要性能的影响 (7) 3.1悬架对汽车平顺性的影响 (7) 3.1.1悬架弹性特性对汽车行驶平顺性的影响 (7) 3.1.2悬架系统中的阻尼对汽车行驶平顺性的影响 (10) 3.1.3非簧载质量对汽车行驶平顺性的影响 (11) 3.1.4改善平顺性的主要措施 (12) 3.2悬架与汽车操纵稳定性 (12) 3.2.1 汽车的侧倾 (12) 3.2.2侧倾时垂直载荷对稳态响应的影响 (14) 3.3本章小结 (16) 第4章悬架主要参数的确定 (16) 4.1 悬架静挠度的计算 (17) 4.2 悬架动挠度的计算 (17)
第5章双横臂独立悬架导向机构的设计 (19) 5.1 导向机构设计要求 (19) 5.2导向机构的布置参数 (19) 5.2.1侧倾中心 (19) 5.2.2侧倾轴线 (20) 5.2.3纵倾中心 (20) 5.2.4悬架横臂的定位角 (21) 5.2.5纵向平面上、下横臂的布置方案 (21) 5.2.6横向平面上、下横臂的布置方案 (22) 5.2.7水平面上、下横臂摆动轴线的布置方案 (23) 5.2.8上、下横臂长度的确定 (24) 5.3 前轮定位参数与主销轴的布置 (25) 5.3.1主销偏移距 (25) 5.3.2四个前轮定位参数的初步选取 (26) 第6章弹性元件的计算 (28) 6.1 螺旋弹簧的刚度 (28) 6.1.1螺旋弹簧的刚度 (28) 6.1.3弹簧校核 (31) 6.2 小结 (31) 第7章振器的结构类型与主要参数的选择 (32) 7.1 减振器的分类 (32) 7.2 双筒式液力减振器工作原理 (32) 7.3 减震器参数的设计计算 (35) 7.3.1相对阻尼系数的确定 (35) 7.3.2减震器阻尼系数的确定 (35) 7.3.3减震器最大卸荷力的确定 (36) 7.3.4减震器工作缸直径的确定 (37) 第8章横向稳定杆设计计算 (39) 8.1 横向稳定杆的作用 (39) 8.2 横向稳定杆参数的选择 (39) 第9章导向机构的仿真设计 (41) 9.1 仿真设计及分析 (41) 9.1.2前轮外倾角(camber)变化 (43) 9.1.3前轮前束角(toe)的变化 (43) 9.1.4主销倾角(kingpin)的变化 (44)
汽车半主动悬架系统
传统的悬架系统的刚度和阻尼是按经验或优化设计的方法确定的,根据这些参数设计的悬架结构,在汽车行驶过程中,其性能是不变的,也是无法进行调节的,使汽车行驶平顺性和乘坐舒适性受到一定影响。故称传统的悬架系统为被动悬架系统。如果悬架系统的刚度和阻尼特性能根据汽车的行驶调节(车辆的运动状态和路面状况等)进行动态自适应调节,使悬架系统始终处于最佳减振状态,则称为主动悬架。 主动悬架系统按其是否包含动力源可以分为全主动悬架(有源主动悬架)和半主动悬架(无源主动悬架)系统两大类。 全主动悬架 全主动悬架是根据汽车的运动状态和路面状态,适时地调节悬架的刚度和阻尼,使其处于最佳减振状态。它是在被动悬架(弹性元件、减振器、导向装置)中附加一个可控作用力的装置。通常由执行机构、测量系统、反馈控制系统和能源系统4部分组成。执行机构的作用是执行控制系统的指令,一般为发生器或转矩发生器(液压缸、气缸、伺服电动机、电磁铁等)。测量系统的作用是测量系统各种状态,为控制系统提供依据,包括各种传感器。控制系统的作用是处理数据和发出各种控制指令,其核心部件是电子计算机。能源系统的作用是为以上各部分提供能量。 半主动悬架 目前,主流的半主动悬架不考虑改变悬架的刚度,而只考虑改变悬架的阻尼,因此它无动力源且只由可控的阻尼元件组成。由于半主动悬架结构简单,工作时几乎不消耗车辆动力,而且还能获得与全主动悬架相近的性能,故有较好的应用前景。 半主动悬架按阻尼级又可以分成有级式和无级式两种。 (1)有级式半主动悬架它是将悬架系统中的阻尼分为两级、三级或更多级,可由驾驶员选择或根据传感器信号自动进行选择悬架所需要的阻尼级。也就是说,可以根据路面条件(好路或坏路)和汽车的行驶状态(转弯或制动)等来调节悬架的阻尼级,使悬架适应外界环境的变化,从而可以较大幅度地提高汽车的行驶平顺性和操纵稳定性。 半主动悬架中的三级阻尼可调减振器的旁路控制阀是由调节电动机来带动阀芯转动,使控制阀孔具有关闭,小开和大开3个位置,产生3个阻尼值。该减振器应用于OPEL SENTOR 和OPELGA轿车上。 (2)无级式半主动悬架它是根据汽车行驶的路面条件和行驶状态,对悬架系统的阻尼在几毫秒内有最小变到最大进行无级调节。
汽车悬架优化设计_毕业设计论文
4.4.4主销内倾角的优化 (23) 4.4.5轮距优化 (23) 4.4.6各定位参数同时优化 (24) 4.4.6.1前束优化后的图形 (25) 4.4.6.2车轮外倾角优化后的图形 (25) 4.4.6.3主销后倾角优化后的图形 (25) 4.4.6.4主销内倾角优化后的图形 (25) 4.4.6.5轮距变化优化后的图形 (26) 4.4.6.6各参数优化前后的数值表 (26) 4.4.6.7小结 (27) 结论 (27) 致谢 (27) 参考文献 (27)
引言 汽车悬架是汽车一个非常重要的部件。汽车悬架是汽车的车架与车桥或车 轮之间的一切传力连接装置的总称,其作用是传递作用在车轮和车架之间的力和 力扭,并且缓冲由不平路面传给车架或车身的冲击力,并衰减由此引起的震动, 以保证汽车能平顺地行驶。另外,悬架系统能配合汽车的运动产生适当的反应, 当汽车在不同路况作加速、制动、转向等运动时,能提供足够的安全性,保证操 纵不失控。所以,悬架是汽车底盘中最重要、也是汽车改型设计中经常需要进行 重新设计的部件。汽车行驶中路面的不平坦、凸起和凹坑使车身在车轮的垂直作 用力下起伏波动,产生振动与冲击;加减速及制动和转弯使车身产生俯仰和侧倾 振动。这些振动与冲击会严重影响车辆的平顺性和操纵稳定性等重要性能。悬架作为上述各种力和力矩的传动装置,其传递特性能的好坏是影响汽车行驶平顺性 和操纵稳定性最重要、最直接的因素。只有当汽车底盘配备了性能优良的悬架, 才会得到整车性能优良的汽车。 悬架按照结构分大体可以分为独立式悬架和非独立式悬架。非独立悬架具有结构简单、成本低、强度高、保养容易、行车中前轮定位变化小的优点,但由 于其舒适性及操纵稳定性都较差,在现代轿车中基本上已不再使用,多用在货车和大客车上。独立悬架是每一侧的车轮都是单独地通过弹性悬架悬挂在车架或车 身下面的。其优点是:质量轻,减少了车身受到的冲击,并提高了车轮的地面附 着力;可用刚度小的较软弹簧,改善汽车的舒适性;可以使发动机位置降低,汽 车重心也得到降低,从而提高汽车的行驶稳定性;左右车轮单独跳动,互不相干,能减小车身的倾斜和震动。不过,独立悬架存在着结构复杂、成本高、维修不便 的缺点。现代轿车大都是采用独立式悬架,按其结构形式的不同,独立悬架又可分为横臂式、纵臂式、多连杆式、烛式以及麦弗逊式悬架等。麦弗逊悬架因为其 结构简单、制造成本低、节省空间方便发动机布置等优点被广泛地运用。大到宝马M3,保时捷911这类高性能车,小到菲亚特STILO,福特FOCUS,甚至国产的哈飞面包车前悬挂都是采用的麦弗逊式设计。 当前,中国汽车企业大多侧重于汽车整车的研发,而忽视了汽车主要零部件和相关配套产业的提供。然而从某种意义上讲,整车对于汽车产业不是最重要的,最重要的还是汽车关键零部件的创新和发展。关键零部件的科技含量综合体现汽车整车的创新能力和品牌建设能力。我国在底盘的集成设计及开发领域开发 设计起步较晚,设计和制造水平远远落后于国外发达国家。国内大多数整车及零部件制造企业都没有掌握悬架系统的自主设计和开发技术,大多数为引进外国技术进行复制开发和生产,几乎可以说国内企业的底盘技术基本上都是照搬过外 的,没有任何自己的技术。 在现代的工程研究领域,计算机仿真己成为热门研究课题。借助计算机的快速计算能力,人们不仅可以求出所需要的数值结果,还可以模拟出工程中的具体情况,以便人们可以直观的进行分析研究,我们称为计算机仿真技术。今天的机械系统仿真技术研究中,大多以多体系统理论作为研究上的理论基础。计算多体系统动力学的产生极大地改变了传统机构动力学分析的面貌,使工程师从传统的手工计算中解放了出来,只需根据实际情况建立合适的模型,就可由计算机自动求解,并可提供丰富的结果分析和利用手段;对于原来不可能求解或求解极为困 难的大型复杂问题,现可利用计算机的强大计算功能顺利求解;而且现在的动力学分析软件提供了与其它工程辅助设计或分析软件的强大接口功能,它与其它工
车辆工程毕业设计86低速载货汽车车架及悬架系统
第1章前言 车架和悬架系统是汽车设计的重要部分,因为它们的好坏直接关系到汽车各个方面(操控、性能、安全、舒适)性能。 现代汽车绝大多数都具有作为整车骨架的车架。汽车绝大多数部件和总成都是通过车架来固定其位置的,如发动机、传动系统、悬架、转向系统、驾驶室、货箱和有关操纵机构。车架是支撑连接汽车的各零部件,并承受来自车内、外的各种载荷,所以在车辆总体设计中车架要有足够的强度和刚度,以使装在其上面的有关机构之间的相对位置在汽车行驶过程中保持不变并使车身的变形最小,车架的刚度不足会引起振动和噪声,也使汽车的乘坐舒适性、操纵稳定性及某些机件的可靠性下降。过去对车辆车架的设计与计算主要考虑静强度。当今,对车辆轻量化和降低成本的要求越来越高,于是对车架的结构形式设计有高的要求。首先要满足汽车总布置的要求。汽车在复杂多边的行驶过程中,固定在车架上的各总成和部件之间不应发生干涉。汽车在崎岖不平的道路上行驶时,车架在载荷作用下可能产生扭转变形以及在纵向平面内的弯曲变形;车架布置的离地面近一些,以使汽车重心位置降低,有利于提高汽车的行驶稳定性。[]1 悬架是车架(或承载式车身)与车桥(或车轮)之间的一切传力连接装置的总称。它的功用是把路面作用于车轮上的垂直反力(支撑力)、纵向反力(驱动力和制动力)和侧向反力以及这些反力所造成的力矩传递到车架(或承载式车身)上,以保证汽车的正常行驶。在进行设计时,要满足以下几点要求: a.规范合理的型式和尺寸选择,结构和布置合理。 b.保证整车良好的平顺性能。 c.工作可靠,结构简单,装卸方便,便于维修、调整。 d.尽量使用通用件,以便降低制造成本。 e.在保证功能和强度的要求下,尽量减小整备质量。 f.其它有关产品技术规范和标准。[]2 目前,农用运输车不能满足“三农”市场需求,突出表现为一般产品生产能力过剩,技术水平低,质量和维修服务水平差,价格较高,而市场急需的高质量经济型产品不能满足需求。结合生产实际,在农用运输车基础上对低速载货汽车车架及悬架系统进行了设计。
汽车主动悬架控制系统的发展研究
目录 1 引言 (1) 2 汽车悬架系统的类型和应用 (1) 2.1 被动悬架 (1) 2.2 主动悬架 (2) 2.3 半主动悬架 (2) 3 主动悬架控制系统国内外研究现状 (2) 4 汽车悬架的控制策略 (3) 4.1 天棚阻尼与开关阻尼控制 (3) 4.2 随机线性二次最优控制 (3) 4.3 模糊控制 (4) 4.4 神经网络控制 (4) 4.5 预测控制 (4) 4.6 滑模变结构控制 (5) 4.7 复合控制 (5) 5 控制方法的展望 (5) 5.1 注重控制策略的综合运用 (5) 5.2 注重汽车其他系统与主动悬架系统的联合控制研究 (5) 5.3 注重悬架系统模型的降阶研究 (6) 6 结论 (6) 参考文献: (6)
汽车主动(半主动)悬架控制系统的 研究发展 1引言 汽车主动悬架目前是国内外研究的热点问题,研究的关键技术主要在控制策略的选择上及执行器的研发方面。国外由于成本问题,一些油气主动悬架也仅限用在一些高级轿车上,国内在此方面还处在研发及试验阶段,离主动悬架系统普遍使用在轿车上的时代还较远。 2汽车悬架系统的类型和应用 悬架是车架与车桥之间一切传力装置的总称,它的主要功用是传递作用在车轮和车架之间的力和力矩,缓冲由不平路面传给车架或车身的冲击力,并衰减由此引起的振动,以保证汽车能平顺行驶。衡量悬架性能好坏的主要指标是汽车行驶的平顺性; 即乘坐舒适性和操纵稳定性,但这两个方面是相互排斥的性能要求。由于被动悬架的刚度和阻尼系数是固定的,无法根据不同的使用要求自适应地改变,在结构设计上只能是满足平顺性和操纵稳定性之间矛盾的折衷。 为服这个缺陷,国外在五十年代提出了“主动悬架”的概念。主动悬架的特点是能根据外界输入或车辆本身状态的变化进行动态自适应调节。主动悬架包控制单元和力发生器,力发生器的作用下使悬架的特性得到控制,如同改变了悬架的刚度和阻尼系数,其中最关键的是控制算法的优劣。 2.1被动悬架 被动悬架, 由弹性元件和不可变参数的减振器组成, 只能在特定工况下达到最优, 缺少对变载荷、变车速、不可预测路况的适应性。被动悬架是传统的机械结构,由弹簧、减震器和导向机构组成。被动悬架的刚度和阻尼系数均不可调,只能在特定的工况下达到最优减振效果,存在明显的共振峰,难以同时获得良好的乘坐舒适性和操纵稳定性,缺乏灵活性。但被动悬架因结构简单、设计容易和制造方便,且无须额外的能量输入,目前在中低档轿车上应用最为广泛[1]。为了进一步改善被动悬架的减振效果,满足现代汽车对悬架提出的更高的性能要求,在桑塔纳、夏利和赛欧等轿车上加强了通过优化寻找最优悬架参数和对悬架导向机构的研究,采用了带有横向稳定杆的多连杆机构悬架系统,在一定程度上改善了被动悬架减振效果。
国内重型卡车悬架现状与发展趋势分析
悬架系统由弹性元件、导向装置、减振器、缓冲块和横向稳定器等组成。一般来说,汽车的悬架系统分为非独立悬架和独立悬架两种。目前国内重型卡车的悬架主要为非独立悬架,悬架弹性元件一般为钢板弹簧。 ●国内重卡悬架种类 板簧悬架 钢板弹簧悬架(简称板簧悬架)又分为少片变截面钢板悬架与等截面多片板簧悬架。目前国内95%以上的重卡悬架系统是以钢板弹簧为弹性元件兼作导向装置的非独立悬架,其主要优点是结构简单,制造容易,维修方便,工艺成熟,工作可靠。 钢板悬架示意图 缺点是汽车平顺性、舒适性较差;簧下质量大,无法适应重卡轻量化的发展,并且不能同时兼顾重卡的舒适性与操纵稳定性。而空气悬架则充分利用了空气弹簧变刚性的特性,达到同时兼顾这两个方面的目的。 空气悬架 空气悬架系统是以空气弹簧为弹性元件,以空气做弹性介质,在一个密封的容器内充入压缩空气(气压 为0.5~),利用气体的可压缩性,实现其弹性作用的。这种弹簧的刚度可变,具有较理想的弹性特性。
空气悬架示意图 目前空气悬架控制模式主要有两种,一种是采用机械高度阀手动调节。另一种为电子控制(ECAS),使传统空气悬架系统的性能得到很大改善,提高了悬架操作舒适性和反应灵敏度。 橡胶悬架
橡胶悬挂示意图 橡胶悬架是以橡胶弹簧为弹性元件,由于橡胶弹簧具有变刚度的特点,因此,整个悬架有较强的承载能力。橡胶悬架在承载性、可靠性等方面都比传统使用的钢板悬架更具优势,而且能够适应矿山作业等恶劣工况。 ●国内重卡悬架发展现状 板簧悬架 国内汽车悬架弹簧生产企业160余家,遍布全国各地,具有规模的专业生产企业(生产规模在0.8万吨以上)约80余家。产品质量水平已达到国外先进国家90年代水平。大部分企业规模较小,生产集中度低,散乱差问题较严重。 其中真正形成大规模、大批量生产的企业为数不多,大多仍停留在简单生产工艺的水平上,产品成本较高,难以参与国际市场竞争。国内能够生产高档次汽车钢板悬架弹簧的企业只有4家:一汽集团辽阳汽车弹簧厂、东风汽车悬架弹簧有限公司、重庆红岩汽车弹簧厂、山东汽车弹簧厂,他们都具有生产多种叠片簧、渐变刚度弹簧、少片变截面钢板弹簧和双曲率半径及平直段的汽车钢板弹簧的能力。国内能够同时生产客车、货车、轿车悬架弹簧的厂家只有三个:一汽集团辽阳汽车弹簧厂、东风汽车悬架弹簧有限公司、山东汽车弹簧厂。 在重卡领域,每家主机厂基本上都有自己的钢板弹簧配套厂家,一汽解放重卡板簧悬架主要是由一汽集团辽阳汽车弹簧厂配套;东风重卡板簧悬架主要由东风汽车悬架弹簧有限公司配套;中国重汽板簧悬架
汽车悬架系统设计毕业设计和分析
轿车动力总成悬置系统优化设计研究 摘要 随着社会的日益进步和科学技术的不断发展,人们对汽车舒适性的要求也越来越高,良好的平顺性和低噪声是现代汽车的一个重要标志。NVH已经成为衡量汽车质量水平的重要指标之一。而动力总成是汽车最重要的振源之一。如何合理设计动力总成悬置系统能明显降低汽车动力总成和车体的振动已经成为一个重要的课题。 本课题研究的目的是在现有动力总成悬置系统的基础上,优化动力总成悬置系统参数,达到提高整车平顺性和降低噪声的目的。 对动力总成悬置系统进行优化仿真,通过比较优化前的性能可知,优化后悬置系统隔振性能明显改善。 关键词:动力总成;悬置系统;优化
Investigation on Optimization Design of Plant Mounting System of a Passenger Car Abstract With the increasing social progress and the continuous development of science and technology, people on the requirements of automotive comfort become more sophisticated and good ride comfort and low noise is an important sign of the modern automobile. NVH levels have become an important measure of vehicle quality indicator. The vehicle powertrain is one of the most important vibration source. How to design mounting system can significantly reduce the vehicle powertrain and body vibration has become an important issue. This study is aimed at existing powertrain mounting system, based on parameters optimization of powertrain mounting system, to improve vehicle ride comfort and reduce noise. On the optimization of powertrain mounting system simulation, the performance by comparing the known before the optimization, the optimized mounting system significantly improved. Key words: Powertrain;Mounting system;Optimization
汽车主动悬架控制系统的发展研究
目录 1引言1 2汽车悬架系统的类型和应用1 2.1被动悬架1 2.2主动悬架2 2.3半主动悬架2 3主动悬架控制系统国内外研究现状2 4汽车悬架的控制策略3 4.1天棚阻尼与开关阻尼控制3 4.2随机线性二次最优控制3 4.3模糊控制4 4.4神经网络控制4 4.5预测控制4 4.6滑模变结构控制5 4.7复合控制5 5控制方法的展望5 5.1注重控制策略的综合运用5 5.2注重汽车其他系统与主动悬架系统的联合控制研究5 5.3注重悬架系统模型的降阶研究6 6结论6 参考文献:6
汽车主动(半主动)悬架控制系统的 研究发展 1引言 汽车主动悬架目前是国内外研究的热点问题,研究的关键技术主要在控制策略的选择上及执行器的研发方面。国外由于成本问题,一些油气主动悬架也仅限用在一些高级轿车上,国内在此方面还处在研发及试验阶段,离主动悬架系统普遍使用在轿车上的时代还较远。 2汽车悬架系统的类型和应用 悬架是车架与车桥之间一切传力装置的总称,它的主要功用是传递作用在车轮和车架之间的力和力矩,缓冲由不平路面传给车架或车身的冲击力,并衰减由此引起的振动,以保证汽车能平顺行驶。衡量悬架性能好坏的主要指标是汽车行驶的平顺性; 即乘坐舒适性和操纵稳定性,但这两个方面是相互排斥的性能要求。由于被动悬架的刚度和阻尼系数是固定的,无法根据不同的使用要求自适应地改变,在结构设计上只能是满足平顺性和操纵稳定性之间矛盾的折衷。 为服这个缺陷,国外在五十年代提出了“主动悬架”的概念。主动悬架的特点是能根据外界输入或车辆本身状态的变化进行动态自适应调节。主动悬架包控制单元和力发生器,力发生器的作用下使悬架的特性得到控制,如同改变了悬架的刚度和阻尼系数,其中最关键的是控制算法的优劣。 2.1被动悬架 被动悬架, 由弹性元件和不可变参数的减振器组成, 只能在特定工况下达到最优, 缺少对变载荷、变车速、不可预测路况的适应性。被动悬架是传统的机械结构,由弹簧、减震器和导向机构组成。被动悬架的刚度和阻尼系数均不可调,只能在特定的工况下达到最优减振效果,存在明显的共振峰,难以同时获得良好的乘坐舒适性和操纵稳定性,缺乏灵活性。但被动悬架因结构简单、设计容易和制造方便,且无须额外的能量输入,目前在中低档轿车上应用最为广泛[1]。为了进一步改善被动悬架的减振效果,满足现代汽车对悬架提出的更高的性能要求,在桑塔纳、夏利和赛欧等轿车上加强了通过优化寻找最优悬架参数和对悬架导向机构的研究,采用了带有横向稳定杆的多连杆机构悬架系统,在一定程度上改善了被动悬架减振效果。
汽车悬架控制系统发展概述综述
汽车悬架控制系统发展概述 1.前言 悬架依据其可控性可以分为不可控的被动悬架和可控的智能悬架两大类。在多变环境或性能要求高且影响因素复杂的情况下,被动悬架难以满足期望的性能要求;而智能悬架能够对行驶路面、汽车的工况和载荷等状况进行监测,进而控制悬架本身特性及工作状态,使汽车的整体行驶性能达到最佳。智能悬架中主动、半主动悬架在近年来得到了迅速发展,较好地解决了安全性和舒适性这一对卜矛盾,将其缓和至相对较低。 2.主动悬架与半主动悬架 主动悬架是一个动力驱动系统,包括测量系统、反馈控制中心、能量源和执行器四个部分。其原理是测量系统通过传感器获得车辆振动信息,传递给控制中心进行处理,进而由控制中心发出指令给能量源产生控制力,再由执行器进行控制,衰减悬架的振动。由于主动悬架结构复杂,成本高,需要很大的能量消耗,它的发展受到了一定的制约,只在少数高级轿车中有所应用。与之相比,半主动悬架具有结构简单、成本较低、基本不需要消耗能量等优点,而对振动的控制效果在一定程度上却可以接近主动悬架,远远优于被动悬架,因而越来越受到业界的重视,得到了飞速发展。图1为主动悬架的原理图,其中F代表力发生器。图2为一种典型半主动悬架的结构示意图。 半主动悬架与主动悬架结构相似,只是半主动悬架用可调刚度的弹性元件或是可调阻尼的减振器代替主动悬架的力发生器。图2的半主动悬架系统中,一个连续可调的阻尼器与一个传统的普通弹簧并联,需要假定系统中的阻尼器能够完全独立于悬架的相对运动,且能根据力控制信号做出反应。 悬架控制系统的发展概况可以从控制策略、执行机构以及实际应用几个方面来分析。 3.控制策略研究 目前应用于悬架控制系统的控制理论比较多,主要有天棚控制、最优控制、预测控制、模糊控制、自适应控制、神经网络控制以及复合控制等等。 3.1 天棚阻尼与开关阴尼控制思想
汽车底盘(悬架)毕业设计
课程设计说明书 学院:机械电子工程学院 班级:交通运输 学生:略 指导老师:略
任务书 本次课程设计的任务如下: 第一组: 建立汽车的前悬架模型,然后测试,细化,优化该模型,建立目标函数,最后与MATLAB实现联合仿真。 1.测量车轮接地点侧向滑移量 2.测量车轮侧偏角 3.测量车轮前束值 4.测量车轮跳动量 5.测量主销后倾角 第二组: 建立整车模型,实现该车在A,B,C三级道路路面上的仿真。
第一部分创建前悬架模型 (1)创建新模型 双击桌面上得ADAMS/View得快捷图标,创建一个名称为:FRONT_SUSP的新模型。(2)设置工作环境 在ADAMS/View选择菜单中得单位命令将长度单位,质量单位,力的单位,时间单位,角度单位和频率单位分别设置为毫米,千克,牛顿,秒,度和赫兹。在工作网格命令中将网格的X方向和Y方向分别设置为750和800,将网格距设置为50。同时将图标大小设置为50。( 3 ) 创建设计点 在ADAMS/View中的零件库中选择点命令,创建八个设计点,其名称和位置如下图: (4)创建主销,上横臂,下横臂,拉臂,转向拉杆,转向节 在ADAMS/View中的零件库中选择圆柱体命令,定义不同的参数值,在对应点之间创建主销,上横臂,下横臂,拉臂,转向拉杆,转向节。 在ADAMS/View中的零件库中选择球体命令,分别在上横臂,下横臂,转向横拉杆上相应点作为参考点创建铰接球。图形如下:
(5)创建车轮,测试平台及弹簧 在ADAMS/View中的零件库中选择圆柱体命令,选择转向节两端点作为设计点。并在ADAMS/View中的零件库中选择倒角命令,定义倒圆半径为50,完成车轮倒角的设计。 应用ADAMS/View中的零件库中选择圆柱体和长方体命令,在创建的(-350,-320,-200)设计点上创建测试平台。 在上横臂上选择创建一点(174.6,347.89,24.85),在大地上创建点(174.6,647.89,24.85),点击ADAMS/View力库的弹簧,设置其刚度和阻尼,选择创建的两点绘制弹簧。 如图:
毕业设计-汽车悬架设计
2012年毕业设计论文 题目:电动汽车多功能转向系统(悬架设计)学生: 专业:车辆工程 班级: 学号: 指导老师:
目录 摘要 ........................................................................................................................................... - 4 - Abstract ..................................................................................................................................... - 5 - 前言 ........................................................................................................................................... - 6 - 设计背景:.......................................................................................................................... - 6 - 课题来源及要求: ............................................................................................................... - 6 - 主要内容:.......................................................................................................................... - 7 - 产品展示:.......................................................................................................................... - 7 - 第一章悬架分析选型 ............................................................................................................... - 9 - 1.1悬架结构方案选择......................................................................................................... - 9 - 1.1.1 设计对象车型参数..................................................................................................... - 9 - 1.1.2 独立悬架与非独立悬架结构形式的选择 .............................................................. - 9 - 1.1.3 悬架具体结构形式的选择 ..................................................................................- 10 - 1.1.4 弹性原件选择....................................................................................................- 10 - 1.1.5 减振元件选择....................................................................................................- 10 - 1.2传力构件及导向机构 ....................................................................................................- 10 - 1.3横向稳定器 ..................................................................................................................- 11 - 1.4 下摆臂类型选择...........................................................................................................- 11 - 第二章悬架主要参数确定.........................................................................................................- 12 - 2.1悬架挠度计算...............................................................................................................- 12 - 2.1.1悬架静挠度 f的计算.........................................................................................- 12 - c 2.1.2 悬架动挠度 f计算 ...........................................................................................- 13 - d 2.1.3 悬架刚度计算....................................................................................................- 14 - 第三章弹性元件设计................................................................................................................- 15 - 3.1 螺旋弹簧的刚度...........................................................................................................- 15 - 3.2 计算螺旋弹簧的直径....................................................................................................- 15 - 3.3 螺旋弹簧校核 ..............................................................................................................- 16 - 3.3.1 螺旋弹簧刚度校核.............................................................................................- 16 - 3.3.2 弹簧表面剪切应力校核......................................................................................- 16 - 第四章减振器设计 ...................................................................................................................- 17 - 4.1 减振器结构类型的选择 ................................................................................................- 17 - 4.2 减振器参数的设计 .......................................................................................................- 18 - 4.2.1 相对阻尼系数ψ ................................................................................................- 18 - 4.2.2 减振器阻尼系数 的确定..................................................................................- 18 - 4.2.3 减振器最大卸荷力 F的确定 .............................................................................- 19 - 4.2.4 减振器工作缸直径D的确定...............................................................................- 19 - 4.3 横向稳定杆的设计 .......................................................................................................- 21 - 4.3.1 横向稳定杆的作用.............................................................................................- 21 - 4.3.2 横向稳定杆参数的选择......................................................................................- 21 - 第五章麦弗逊式独立悬架导向机构设计....................................................................................- 21 -
汽车悬架系统综述
汽车悬架系统综述 现代汽车中的悬架有两种,一种是从动悬架,另一种是主动悬架。 从动悬架即传统式的悬架,是由弹簧.减振器(减振筒).导向机构等组成,它的功能是减弱路面传给车身的冲击力,衰减由冲击力而引起的承载系统的振动。其中弹簧主要起减缓冲击力的作用,减振器的主要作用是衰减振动。由于这种悬架是由外力驱动而起作用的,所以称为从动悬架。 而主动悬架的控制环节中安装了能够产生抽动的装置,采用一种以力抑力的方式来抑制路面对车身的冲击力及车身的倾斜力。由于这种悬架能够自行产生作用力,因此称为主动悬架。 主动悬架是近几年发展起来的,由电脑控制的一种新型悬架,具备三个条件:(1)具有能够产生作用力的动力源; (2)执行元件能够传递这种作用力并能连续工作;(3)具有多种传感器并将有关数据集中到微电脑进行运算并决定控制方式。因此,主动悬架汇集了力学和电子学的技术知识,是一种比较复杂的高技术装置。 例如装置了主动悬架的法国雪铁龙桑蒂雅,该车悬架系统的中枢是一个微电脑,悬架上有5 种传感器,分别向微电脑传送车速.前轮制动压力.踏动油门踏板的速度.车身垂直方向的振幅及频率.转向盘角度及转向速度等数据。电脑不断接收这些数据并与预
先设定的临界值进行比较,选择相应的悬架状态。同时,微电脑独立控制每一只车轮上的执行元件,通过控制减振器内油压的变化产生抽动,从而能在任何时候.任何车轮上产生符合要求的悬架运动。因此,桑蒂雅桥车备有多种驾驶模式选择,驾车者只要扳动位于副仪表板上的“正常”或“运动”按钮,轿车就会自动设置在最佳的悬架状态,以求最好的舒适性能。 另外,主动悬架具有控制车身运动的功能。当汽车制动或拐弯时的惯性引起弹簧变形时,主动悬架会产生一个与惯力相对抗的力,减少车身位置的变化。例如德国奔驰2000 款CL 型跑车,当车辆拐弯时悬架传感器会立即检测出车身的倾斜和横向加速度,电脑根据传感器的信息,与预先设定的临界值进行比较计算,立即确定在什么位置上将多大的负载加到悬架上,使车身的倾斜减到最小。 汽车主动悬架悬架结构。 悬架作用悬架是汽车中的一个重要总成,它把车架与车轮弹性地联系起来,关系到汽车的多种使用性能。从外表上看,轿车悬架仅是由一些杆.筒以及弹簧组成,但千万不要以为它很简单,相反轿车悬架是一个较难达到完美要求的汽车总成,这是因为悬架既要满足汽车的舒适性要求,又要满足其操纵稳定性的要求,而这两方面又是互相对立的。比如,为了取得良好的舒适性,需要大大缓冲汽车的震动,这样弹簧就要设计得软些,但弹簧软了却容易使汽车发生刹车“点头”.加速“抬头”以及左右侧倾严重