Automatic Route Tracking of Smartcar
Automatic Route Tracking of Smartcar
Based on Fuzzy Control
Guiyou Chen and Zhenhua Li Ping Yang
School of Control Science and Engineering Key Laboratory of Complex System and Intelligent Sciences
Shandong University Institute of Automation, Chinese Academy of Sciences, Graduate University of Chinese Academy of Sciences
Shandong, Jinan, 250061,P.R. China Haidian district,Beijing,100080,P.R. China
chenguiyou@https://www.360docs.net/doc/753986696.html, yangping06@https://www.360docs.net/doc/753986696.html,
Abstract - The principle of fuzzy control and its application in automatic route tracking of smartcar are presented in the paper. The fuzzy controller is established to control the steering serv o motor of the smartcar. Simulation of the designed controller based on MATLAB fuzzy logical toolbox is proposed. And the fuzzy controller is realized using Freescale fuzzy inference machine. It is successfully applied in the automatic route tracking. The hardware design of the smartcar is introduced. Then, the process of establishing the fuzzy controller is described in detail, including the choice of fuzzy input and output v ariables, linguistic v alues, domain, input and output membership functions, rule base, fuzzification, rule inference, defuzzification. The validity of the designed controller is verified by MATLAB simulation and actual operating results.
Index Terms -fuzzy controller, automatic route tracking, smartcar, Freescale microcontroller.
I.I NTRODUCTION
‘Freescale cup’ smartcar contests have been successfully held in many countries. Many specialized knowledge are involved in the contest such as control science, pattern recognition science, sensor technology, automobile electronic, electricity, computer science, mechanics, and so on, as in [1].
A good long-term impetus to integrate the knowledge and practice abilities of the undergraduates has been brought out. And the contest can stimulate the development of automobile electronic technology. All the teams are required to use the same smartcar models provided by the organization committee. The microcontroller MC9S12DG128 is assigned as the core control unit, which is made in Freescale semiconductor. Participants are required to choose and design the control system, including acquisition and processing of sensor signals, control algorithm design and implementation, DC motor driver design, steering servo control, and so on. Upon completion of the smartcar control system design and debugging, the contest result largely depends on the speed of the car in the designated route. The smartcar’s speed is largely influenced by the smartcar’s route tracking time, as in [2].
Fuzzy control belongs to the intelligent control field. As the precise mathematical model of control object is not needed, fuzzy control has been widely used in industrial control area, as in [3].
The hardware design of the smartcar is introduced in this paper. The process of establishing the fuzzy controller is proposed in detail. The simulation of the designed controller based on MATLAB’s fuzzy logical toolbox is presented, which is used to verify the validity of the designed controller. The fuzzy controller is realized using Freescale fuzzy inference machine. It is used to control the smartcar’s steering servo motor. The practical operating result shows that the performance of the controller can meet the design requirements.
II.S YSTEM S TRUCTURE
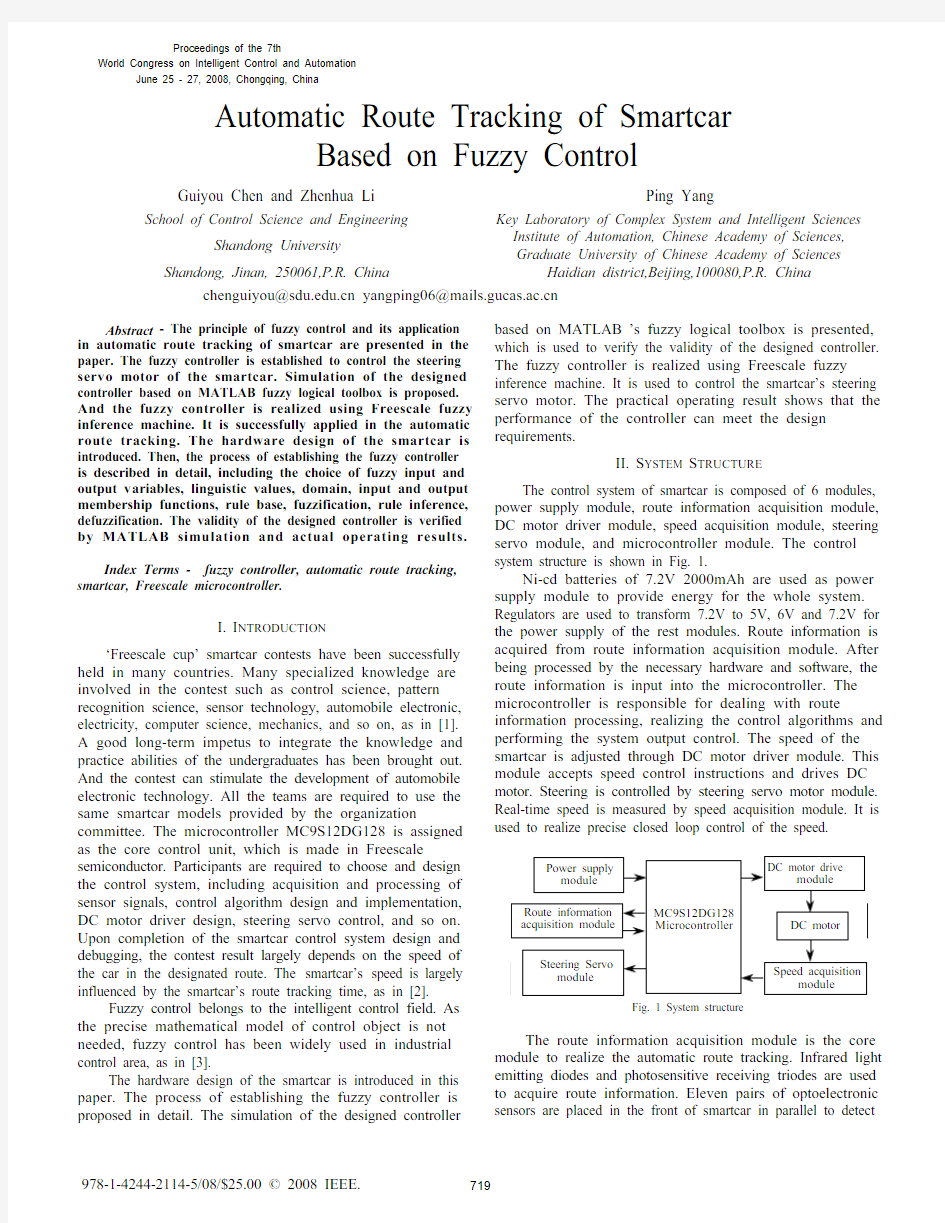
The control system of smartcar is composed of 6 modules, power supply module, route information acquisition module, DC motor driver module, speed acquisition module, steering servo module, and microcontroller module. The control system structure is shown in Fig. 1.
Ni-cd batteries of 7.2V 2000mAh are used as power supply module to provide energy for the whole system. Regulators are used to transform 7.2V to 5V, 6V and 7.2V for the power supply of the rest modules. Route information is acquired from route information acquisition module. After being processed by the necessary hardware and software, the route information is input into the microcontroller. The microcontroller is responsible for dealing with route information processing, realizing the control algorithms and performing the system output control. The speed of the smartcar is adjusted through DC motor driver module. This module accepts speed control instructions and drives DC motor. Steering is controlled by steering servo motor module. Real-time speed is measured by speed acquisition module. It is used to realize precise closed loop control of the speed.
Fig. 1 System structure
The route information acquisition module is the core module to realize the automatic route tracking. Infrared light emitting diodes and photosensitive receiving triodes are used to acquire route information. Eleven pairs of optoelectronic sensors are placed in the front of smartcar in parallel to detect
Proceedings of the 7th
World Congress on Intelligent Control and Automation June 25 - 27, 2008, Chongqing, China
the route information. B lack track line is placed in the path. Reflection light intensity received by photosensitive receiving triodes is different when the triodes are over black or white track. The signals are amplified and filtered, and then are input into ADC module of microcontroller. According to the route information, the microcontroller calculates the deviating angle between the smartcar and the route track. The control algorithm module makes some calculation to get the system outputs, including object speed and servo steering angle, so achieves the target of automatic route tracking.
There are several kinds of controllers to complete the automatic route tracking of the smartcar, such as PID control, expert systems, fuzzy control, and so on, as in [1] and [3]. In the paper, a fuzzy controller based on Freescale fuzzy inference machine is used to control the steering of smartcar.
III. DESIGN OF F UZZY CONTROLLER
A. The basic principle of fuzzy control
A fuzzy control system is composed of assigned input, fuzzy controller, controlled object and feedback signal. A fuzzy controller is divided into four parts, as in [3, 4, 12, and 13]: fuzzification, rule base, rule inference and defuzzification. The structure of the smartcar’s fuzzy controller is shown in Fig. 2.
B. The basic requirements of fuzzy controller
The basic requirements of the fuzzy controller are,
1) When the smartcar is on straight track, steering servo motor should steer middle.
2) The smartcar should not run out the track.
3) When the smartcar is on the bending track, the angle of steering should increase with the increasing of the smartcar deviating angle. The steering angle output should be a bit larger than usual when speed is high.
C. The design of fuzzy controller
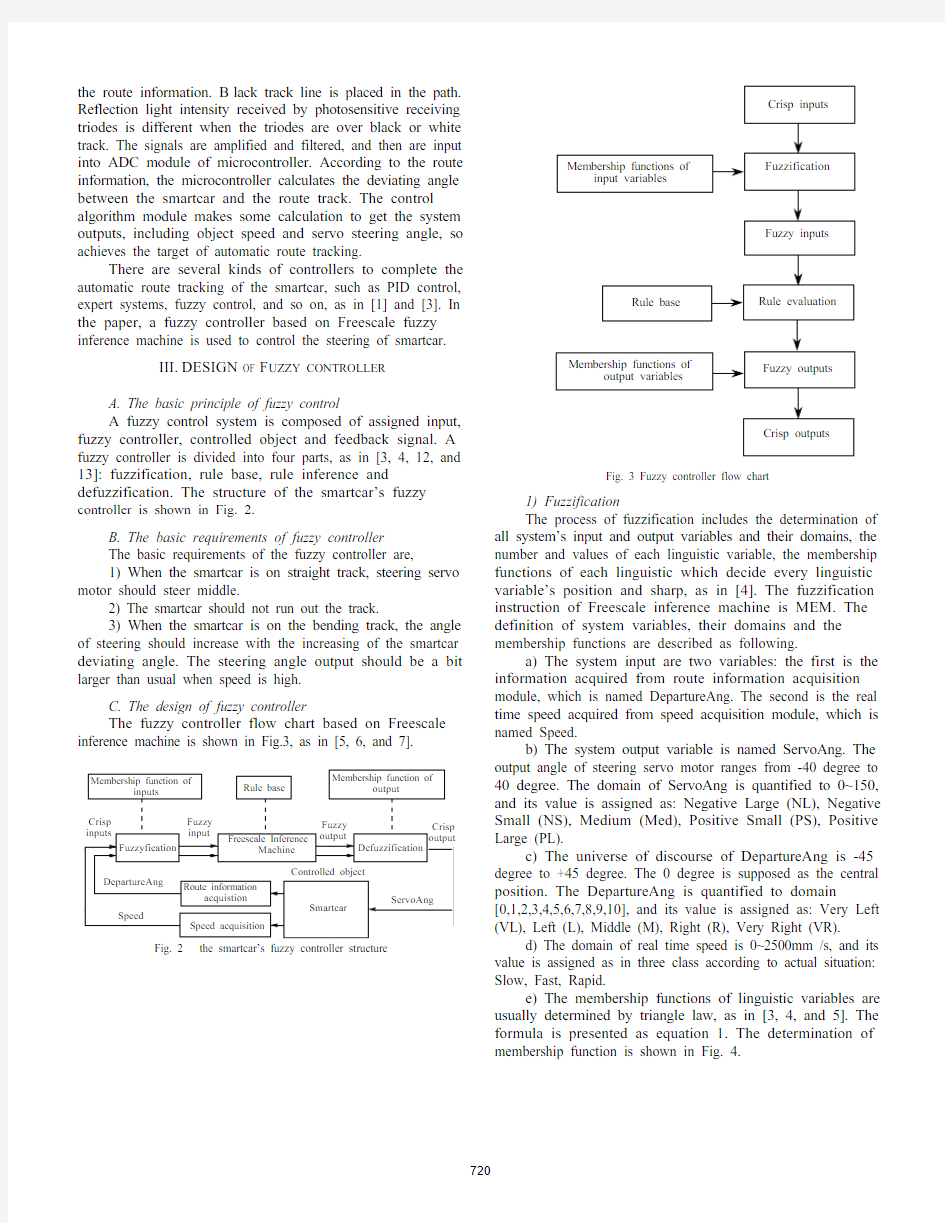
The fuzzy controller flow chart based on Freescale inference machine is shown in Fig.3, as in [5, 6, and 7].
Fig. 2 the smartcar’s fuzzy controller structure
Fig. 3 Fuzzy controller flow chart
1) Fuzzification
The process of fuzzification includes the determination of all system’s input and output variables and their domains, the number and values of each linguistic variable, the membership functions of each linguistic which decide every linguistic variable’s position and sharp, as in [4]. The fuzzification instruction of Freescale inference machine is MEM. The definition of system variables, their domains and the membership functions are described as following.
a) The system input are two variables: the first is the information acquired from route information acquisition module, which is named DepartureAng. The second is the real time speed acquired from speed acquisition module, which is named Speed.
b) The system output variable is named ServoAng. The output angle of steering servo motor ranges from -40 degree to 40 degree. The domain of ServoAng is quantified to 0~150, and its value is assigned as: Negative Large (NL), Negative Small (NS), Medium (Med), Positive Small (PS), Positive Large (PL).
c) The universe of discourse of DepartureAng is -45 degree to +45 degree. The 0 degree is supposed as the central position. The DepartureAng is quantified to domain [0,1,2,3,4,5,6,7,8,9,10], and its value is assigned as: Very Left (VL), Left (L), Middle (M), Right (R), Very Right (VR).
d) The domain of real time speed is 0~2500mm /s, and its value is assigned as in three class according to actual situation: Slow, Fast, Rapid.
e) The membership functions of linguistic variables are usually determined by triangle law, as in [3, 4, and 5]. The formula is presented as equation 1. The determination of membership function is shown in Fig. 4.
°°°
°°°?
-
<<≤
?≤
c a x
c x b b c x
c b
x a a b a x x A ;;0;;)(μ (1) (x A |ì1
input
Fig. 4 Determination of membership function
According to the practice experience, the definition of the membership functions of linguistic variables is shown in Fig.5.
(a) DepartureAng membership function
(b) Speed membership function
Fig.5 Membership functions of input linguistic variables
f) Membership function of output variable
Non-single-value function is used as membership function of ServoAng. While when writing microcontroller assembly program, single-value function is used, as in [4]. The definition of the function is shown in Fig. 6.
Fig. 6 Membership functions of ServoAng
2) Rule inference
a) Establishment of Rule Base
The basic rule of the inference is: IF X is A AND Y is B THEN Z is C, as in [4].
Where, ’X is A’ is antecedent 1, ’Y is B’ is antecedent 2, and ‘Z is C’ is consequent. Antecedents is connected by Symbol ‘AND’.
The rule base of smartcar control system is shown in Table I.
TABLE I R ULE B ASE
Antecedent1 DepartureAng
Antecedent 2 Speed
VL L M R VR
Slow NS NS Z PS PS Fast N B NS Z PS P B Rapid N B N B Z P B P B
follow: if DepartureAng is very left (VL) and speed is slow then ServoAng is Negative small (NS).
b) Inference
MAX-MIN law is used in fuzzy inference based on Freescale inference machine. The related instruction of Freescale inference machine is REV.
Fuzzy inference instruction sets up rule base, finds out the effective rules to figure out rule intensity, and outputs the fuzzy output.
3) Defuzzification
The results of fuzzy inference are fuzzy outputs. The crisp output can be got by defuzzification. In order to defuzzificate, the membership functions of outputs variables
are needed. Centroid law is usually used to realize defuzzication, as in [4, 5].
Formula of centroid law is shown in equation 2.
||===
n
n
1
1
i i i
i
i
F
F
S COG
(2)
In equation 2, F i is the result of inference. S i is the weight of output variables. COG is the crisp output of fuzzy controller.
IV. S IMULATION OF T HE D ESIGNED F UZZY C ONTROLLER Fuzzy logic toolbox of MATLAB software is used to simulate the designed fuzzy controller. In the MATLAB Fuzzy Inference System editor (FIS Editor), basic attributes are set as follows: ‘And’ method is set as prod; ‘Or’ method is set as probor; ‘Implication’ is set as prod; ‘Aggregation’ is set as max; ‘Defuzzification’ is set as centroid, as in [8,9,10,11].
I/O variables of fuzzy controller, as well as their membership functions are input into MATLA B by Membership Function Editor (MFE). The rule base shown in TABLE I is the input in Rule Editor (RE).
The surface view of the designed fuzzy controller is shown in Fig.7.
The output of fuzzy controller is checked through Rule Viewer as shown in Fig. 8.
When the Speed is set to 150cm/s, with the DepatureAng changing, ServoAng is changed at the same time. The results are shown in TABLE II.
If the real time speed keeps unchanged, the following conclusions can be drawn,
a) When DepartureAng is 5, which means smartcar is on the central of the track, ServoAng value is 75. That means steering is not needed.
b) When deviating from the track, the output of fuzzy controller changed synchronously. For example, if Departure=3, the output value will be 42.8.
c) With the smartcar’s deviation from central angle increasing, the output increases.
The characteristics of fuzzy controller above can satisfy the basic requirements of smartcar control system as described before.
When the DepatureAng is set to 3, with the Speed changing, ServoAng is changed at the same time. The results are shown in TABLE III.
It can be seen from TAB LE III that if the DepatureAng keeps unchanged, the output of fuzzy controlled increases with the increasing of smartcar’s real speed. This characteristic can satisfy the requirement when speed is high, even with the smaller deviation; output of the fuzzy controller is larger than
usual.
Fig.7 Surface viewer of the fuzzy controller
Fig. 8 Rule viewer of the output of fuzzy controller
TABLE II
O UTPUT O F F UZZY C ONTROLLER (1)
Inputs Output
DepatureAng Speed (cm/s) ServoAng
0 150 13.2 1 150 13.7 2 150 32.4 3 150 42.8 4 150 59.1 5 150
75
6 150 90.8
7 150 111
8 150 122
9 150 135 10 150
135
TABLE III
O UTPUT O F F UZZY C ONTROLLER (2)
Inputs Output DepatureAng Speed (cm/s) ServoAng 3 120 42.8 3 150 42.8
3 160 41.4
3 170 38.7
3 180 35.2
3 190 31.4
3 200 27.3
V. R EALIZATION OF
F UZZY C ONTROLLER
The designed fuzzy controller is based on Freescale
inference machine. The inference machine is supported by KB G software package, which makes the engineers design much easier, as in [4, 5]. Freescale inference machine is usually written with assembly language to ensure the desired performances. Freescale inference machine mainly includes
three parts. The definition of data structure and variables are the first part. The definition of input and output variables’ membership functions are the second part. Executing fuzzy
control inference is the third part. The flowchart of using Freescale inference machine is shown in Fig. 9.
Fig. 9 Flowchart of using Freescale inference machine
VI. C ONCLUSION
A fuzzy controller based on Freescale inference machine is designed in the paper. The validity of the designed
controller is verified by MATLAB simulation. Fuzzy
controller module is realized by using Freescale inference
machine instructions. The fuzzy control module is called by C
in main routine, which realizes the automatic route tracking
together with other control modules. Using the fuzzy controller, the smartcar system actually works well.
R EFERENCES
[1] Kaisheng Huang, Jin Huamin Jiang Dinan, O verview of Design for
Korea Intelligent Model Car Design Contest , Beijing: Tsinghua Freescale MCU/DSP Application Centre, 2004. (In Chinese).
[2] The Rules of 1st freescale cup undergraduates’ smartcar contest , Beijing: Tsinghua Freescale MCU/DSP Application Centre. 2006. (In Chinese). [3] Shiyong Li. Fuzzy Control Neurocontrol and Intelligent Cybernetics, Helongjiang: Haerbing industrial university publishing house, 1996. (In Chinese). [4] B eibei Shao , the O nline Development of the Embedded Application of
Microcontroller , Beijing: Tsinghua university publishing house, 2004. (In Chinese).
[5] S12XCPUV2 Reference Manual , V02, 2006, Freescale Inc.
[6] MC9S12DG128 Device User Guide , October 2002 Motorola Inc. [7] HCS12 CORE Datasheet , August, 2000, Motorola Inc.
[8] SHAO Gui_rong, “Matlab_based design and simulation of fuzzy control
system,” Journal of Chongqing Institute of Technology (Natural Science
Edition), vol. 21, no. 5, pp. 51-54+85, May 2007. (in Chinese).
[9] Wei wei, MATLAB Control Toolbox Handbook, B eijing: National Defense industrial publishing house, 2004. (in Chinese).
[10] Lotfi A, Zadeh, B erkeley, CA, “Fuzzy Logic Toolbox User’s Guide Version 2.1.1”, MathWorks, 2001.
[11] SIMULINK-Dynamic System Simulation for MATLAB, MathWorks,
1998. [12] Weiguo Zhang, The Theory and Application of Fuzzy Control, Xi'an:
Northwest industry university publishing house, 2000. (in Chinese). [13] Shuguang Liu, the Technology of Fuzzy Control. Beijing: China Textile
and apparel Press .2001. (In Chinese).
幼儿园大班主题活动汽车总动员(完整资料).doc
此文档下载后即可编辑 大班主题活动《汽车总动员》 常州市天宁区红梅东村幼儿园:庞洁叶丽敏 一、主题背景 随着现代文明的进展,汽车渐渐汽车进入了孩子们的生活:BRT快速公交车、层出不穷的车展、马路上的各种特种车、工作中的水泥搅拌车、而且许多的家庭还拥有了私家车等等,孩子们对汽车不再陌生,具备了一定的生活经验。同时,车子也因它自身会动、会响等特性,吸引了孩子们的目光,特别是男孩子,家里总有几部玩具汽车。我们随时都可以看见他们小小的身影蹲在地上专注地玩着车子。生活中,公共汽车、出租车、小轿车、工程车、救护车、消防车、警车等常常吸引出孩子们的注意力,车子的声音也给孩子们留下了深刻的印象,他们常会在一起模仿各种车子发出的特殊声音,并在这中模仿活动中乐此不疲。 经常发现孩子们在发表各种见解:有的说“BRT最方便了,我和爸爸到月星看家具,就坐了,又快又便宜。”有的说:“我们家里有小车,爸爸妈妈还带我自驾游呢。”有的说:“我爷爷脑溢血,救护车开得可快了。”有的说:“我见过水泥搅拌车,力气最大了,可以边开边运水泥呢。”……随着汽车时代的到来,汽车已经进入了人们的平常生活中,不再是简单的“行”了,而是渗入了人们的生活、休闲、运动等各个方面,这对孩子们来说,就是最好的教育资源啊。 自然、社会是一部真实、丰富的百科全书,向幼儿展示了具体、形象、生动的学习情境,生活即课堂,社会即学校,我们围绕“汽车”这一教育资源,有效地整合多方资源,根据我园特点与孩子们的兴趣与已有经验,我们开展实施了《汽车总动员》主题活动,帮助幼儿了解汽车基本结构,获得乘车经验,学习遵守交通规则,建构汽车社区,养成
安全的乘车习惯等。 二、主题总目标 1.有效利用各种教育资源,帮助幼儿了解汽车的种类、基本结构 等相关信息,能用完整连贯的语言表达自己对汽车的认识。 2.运用多种手段,引导幼儿感受汽车在现实生活中的作用,体验 汽车与人们生活的关系。 3.幼儿尝试用多种方式表达、表现与汽车相关的感受和体验,感 受创造性活动的快乐。 四、资源利用 1.幼儿园资源: 物质资源:幼儿园科学室提供了各种各样的车模与车子的图片,可以为孩子们提供视 觉大餐,配套的各种教学图片、教学用的VCD、多媒体课件、录音磁带等。 人力资源:我们的教师有八名取得了小车的驾驶执照,对车辆的驾驶与交通规则比较熟悉,可以为孩子们提供正确的知识与经验。还
独立主格with用法小全
独立主格篇 独立主格,首先它是一个“格”,而不是一个“句子”。在英语中任何一个句子都要有主谓结构,而在这个结构中,没有真正的主语和谓语动词,但又在逻辑上构成主谓或主表关系。独立主格结构主要用于描绘性文字中,其作用相当于一个状语从句,常用来表示时间、原因、条件、行为方式或伴随情况等。除名词/代词+名词、形容词、副词、非谓语动词及介词短语外,另有with或without短语可做独立主格,其中with可省略而without不可以。*注:独立主格结构一般放在句首,表示原因时还可放在句末;表伴随状况或补充说明时,相当于一个并列句,通常放于句末。 一、独立主格结构: 1. 名词/代词+形容词 He sat in the front row, his mouth half open. Close to the bank I saw deep pools, the water blue like the sky. 靠近岸时,我看见几汪深池塘,池水碧似蓝天。 2. 名词/代词+现在分词 Winter coming, it gets colder and colder. The rain having stopped, he went out for a walk.
The question having been settled, we wound up the meeting. 也可以The question settled, we wound up the meeting. 但含义稍有差异。前者强调了动作的先后。 We redoubled our efforts, each man working like two. 我们加倍努力,一个人干两个人的活。 3. 名词/代词+过去分词 The job finished, we went home. More time given, we should have done the job much better. *当表人体部位的词做逻辑主语时,不及物动词用现在分词,及物动词用过去分词。 He lay there, his teeth set, his hands clenched, his eyes looking straight up. 他躺在那儿,牙关紧闭,双拳紧握,两眼直视上方。 4. 名词/代词+不定式 We shall assemble at ten forty-five, the procession to start moving at precisely eleven. We divided the work, he to clean the windows and I to sweep the floor.
struggle的用法和短语例句
struggle的用法和短语例句 【篇一】struggle的用法 struggle的用法1:struggle的基本意思是“奋斗”,即为实现某一目的而尽力做某事。常指遇到有力的反抗而在逆境中拼搏或努力从 束缚中解脱出来。有时含有“挣扎”的意味。 struggle的用法2:struggle也可表示“(与某人)争斗,搏斗,打斗”,还可表示“艰难地(朝某方向)行进”。 struggle的用法3:struggle是不及物动词,与介词against连用,表示“同与之对立或对抗的人或物实行斗争”; 与介词for连用,表示“为…而斗争”。 struggle的用法4:struggle可接动词不定式作目的状语。 struggle的用法5:struggle的基本意思是“斗争”,表示抽象的行为,用作不可数名词; 表示具体的“打斗,搏斗,战斗,斗争”时,可用作可数名词。 struggle的用法6:struggle作“努力,奋斗”解时,一般用单数形式。 【篇二】struggle的常用短语 struggle against (v.+prep.) struggle along1 (v.+adv.) struggle along2 (v.+prep.) struggle for (v.+prep.) struggle in (v.+prep.) struggle on (v.+adv.)
struggle out (v.+adv.) struggle with (v.+prep.) 【篇三】struggle的用法例句 1. It's a constant struggle to try to keep them up to par. 要让他们达标,需要持续努力。 2. Curiously, the struggle to survive has greatly improved her health. 奇怪的是,她拼命求生的抗争使得她的健康状况大有好转。 3. He grandly declared that "international politics is a struggle for power". 他一本正经地宣称“国际政治是一场权力之争”。 4. This age-old struggle for control had led to untold bloody wars. 这场由来已久的对控制权的争夺已经引发了无数流血的战争。 5. It is only a hobby, not a life or death struggle. 这仅仅一项爱好,不需要拼死拼活地努力。 6. There is a ceaseless struggle from noon to night. 从中午到夜晚,争斗没有停歇。 7. He is currently locked in a power struggle with his Prime Minister. 他当前陷入了一场同的权力之争当中。 8. He praised her role in the struggle against apartheid.
(完整版)助动词用法及练习
be动词,情态动词,助动词do/does的用法区别及练习 助动词,顾名思义就是帮助动词完成疑问及否定的,本身没有什么含义。主要的助动词有be,do,will,have等,其用法详述如下: 一、⑴由连系动词am,is,are构成的句子:变一般疑问句时把am,is,are提到句子的前面,句尾用问号即可。变否定句时直接在am,is,are后面加not即可。例如: 肯定句:He is a student. 一般疑问句: Is he a student? 否定句: He is not a student. 画线提问: 对he提问: Who is a student? 对a student 提问: What is he? (2)was 是am,is的过去式,were是are的过去式,若句子中有以上两词时,变疑问句及否定句方法与(1)相同。 二、(1) 由情态动词can, may,will ,shall等构成的句子: 变一般疑问句时把can, may,will ,shall提到句子的前面,句尾用问号即可.变否定句时直接在can,may,后面加not即可. 例如: 肯定句: She can swim. 一般疑问句: Can she swim? 否定句: She can not swim. 画线提问: 对she提问: Who can swim? 对swim提问: What can she do? (2)could,might,would,should是can,may,will,shall的过去式,若句子中有以上两词时,变疑问句及否定句方法与(1)相同。 三、(1)由行为动词构成的句子: 需要加助词do或does. 变一般疑问句时把do/does放在句子前面. 变否定句时把don’t/doesn’t放在动词的前面。要注意观察动词的形式并对号入座。一般疑问句和否定句的动词三单式都要变回原型。 play-----do plays-----does 例如: 肯定句: They play football after school. He plays football after school. 一般疑问句: Do they play football after school? Does he play football after school? 否定句: They don't (do not) play football after school. He doesn’t’ play football after school. 画线提问: 对they/he提问: Who plays football after school? 对play football提问: What do they do after school? What does he do after school? 对after school提问: When do they play football? When does he play football? (2)did是do和did的过去式,变一般疑问句时把did放在句子前面. 变否定句时把didn’t 放在动词的前面, 要注意观察动词的形式并对号入座。一般疑问句和否定句的动词都要变回原型。
大班主题活动汽车总动员之令狐文艳创作
大班主题活动《汽车总动员》 令狐文艳 常州市天宁区红梅东村幼儿园:庞洁叶丽敏 一、主题背景 随着现代文明的进展,汽车渐渐汽车进入了孩子们的生活:BRT快速公交车、层出不穷的车展、马路上的各种特种车、工作中的水泥搅拌车、而且许多的家庭还拥有了私家车等等,孩子们对汽车不再陌生,具备了一定的生活经验。同时,车子也因它自身会动、会响等特性,吸引了孩子们的目光,特别是男孩子,家里总有几部玩具汽车。我们随时都可以看见他们小小的身影蹲在地上专注地玩着车子。生活中,公共汽车、出租车、小轿车、工程车、救护车、消防车、警车等常常吸引出孩子们的注意力,车子的声音也给孩子们留下了深刻的印象,他们常会在一起模仿各种车子发出的特殊声音,并在这中模仿活动中乐此不疲。 经常发现孩子们在发表各种见解:有的说“BRT最方便了,我和爸爸到月星看家具,就坐了,又快又便宜。”有的说:“我们家里有小车,爸爸妈妈还带我自驾游呢。”有的说:“我爷爷脑溢血,救护车开得可快了。”有的说:“我见过水泥搅拌车,力气最大了,可以边开边运水泥呢。”……随着汽车时代的到来,汽车已经进入了人们的平常生活中,不再是简单的“行”了,而是渗入了人们的生活、休闲、运动等各个方面,这对孩子们来说,就是最好的教育资源啊。 自然、社会是一部真实、丰富的百科全书,向幼儿展示了
具体、形象、生动的学习情境,生活即课堂,社会即学校,我们围绕“汽车”这一教育资源,有效地整合多方资源,根据我园特点与孩子们的兴趣与已有经验,我们开展实施了《汽车总动员》主题活动,帮助幼儿了解汽车基本结构,获得乘车经验,学习遵守交通规则,建构汽车社区,养成安全的乘车习惯等。 二、主题总目标 1.有效利用各种教育资源,帮助幼儿了解汽车的种类、基 本结构等相关信息,能用完整连贯的语言表达自己对汽 车的认识。 2.运用多种手段,引导幼儿感受汽车在现实生活中的作 用,体验汽车与人们生活的关系。 3.幼儿尝试用多种方式表达、表现与汽车相关的感受和体 验,感受创造性活动的快乐。
5种基本句型和独立主格结构讲解
英语中的五种基本句型结构 一、句型1:Subject (主语) +Verb (谓语) 这种句型中的动词大多是不及物动词,所谓不及物动词,就是这种动词后不可以直接接宾语。常见的动词如:work, sing, swim, fish, jump, arrive, come, die, disappear, cry, happen等。如: 1) Li Ming works very hard.李明学习很努力。 2) The accident happened yesterday afternoon.事故是昨天下午发生的。 3)Spring is coming. 4) We have lived in the city for ten years. 二、句型2:Subject (主语) +Link. V(系动词) +Predicate(表语) 这种句型主要用来表示主语的特点、身份等。其系动词一般可分为下列两类: (1)表示状态。这样的词有:be, look, seem, smell, taste, sound, keep等。如: 1) This kind of food tastes delicious.这种食物吃起来很可口。 2) He looked worried just now.刚才他看上去有些焦急。 (2)表示变化。这类系动词有:become, turn, get, grow, go等。如: 1) Spring comes. It is getting warmer and warmer.春天到了,天气变得越来越暖和。 2) The tree has grown much taller than before.这棵树比以前长得高多了。 三、句型3:Subject(主语) +V erb (谓语) +Object (宾语) 这种句型中的动词一般为及物动词, 所谓及物动词,就是这种动词后可以直接接宾语,其宾语通常由名词、代词、动词不定式、动名词或从句等来充当。例: 1) He took his bag and left.(名词)他拿着书包离开了。 2) Li Lei always helps me when I have difficulties. (代词)当我遇到困难时,李雷总能给我帮助。 3) She plans to travel in the coming May Day.(不定式)她打算在即将到来的“五一”外出旅游。 4) I don’t know what I should do next. (从句)我不知道下一步该干什么。 注意:英语中的许多动词既是及物动词,又是不及物动词。 四、句型4:Subject(主语)+Verb(谓语)+Indirect object(间接宾语)+Direct object (直接宾语) 这种句型中,直接宾语为主要宾语,表示动作是对谁做的或为谁做的,在句中不可或缺,常常由表示“物”的名词来充当;间接宾语也被称之为第二宾语,去掉之后,对整个句子的影响不大,多由指“人”的名词或代词承担。引导这类双宾语的常见动词有:buy, pass, lend, give, tell, teach, show, bring, send等。如: 1) Her father bought her a dictionary as a birthday present.她爸爸给她买了一本词典作为生日礼物。 2)The old man always tells the children stories about the heroes in the Long March. 老人经常给孩子们讲述长征途中那些英雄的故事。上述句子还可以表达为: 1)Her father bought a dictionary for her as a birthday present. 2)The old man always tells stories about the heroes to the children in the Long March. 五、句型5:Subject(主语)+Verb (动词)+Object (宾语)+Complement(补语) 这种句型中的“宾语+补语”统称为“复合宾语”。宾语补足语的主要作用或者是补充、说明宾语的特点、身份等;或者表示让宾语去完成的动作等。担任补语的常常是名词、形容词、副词、介词短语、分词、动词不定式等。如: 1)You should keep the room clean and tidy. 你应该让屋子保持干净整洁。(形容词) 2) We made him our monitor.(名词)我们选他当班长。 3) His father told him not to play in the street.(不定式)他父亲告诉他不要在街上玩。
高中英语单词天天记struggle素材
· struggle · v. ['str?gl] ( struggles; struggled; struggling ) · · 双解释义 · vi.斗争,奋斗,努力fight; try to overcome difficulties, etc.; make great efforts · 基本要点 ? 1.struggle的基本意思是“奋斗”,即为实现某一目的而尽力做某事。常指遇到有 力的反抗而在逆境中拼搏或努力从束缚中解脱出来。有时含有“挣扎”的意味。 2.struggle也可表示“(与某人)争斗,搏斗,打斗”,还可表示“艰难地(朝某方向) 行进”。 3.struggle是不及物动词,与介词against连用,表示“同与之对立或对抗的人或物 进行斗争”; 与介词for连用,表示“为…而斗争”。 4.struggle可接动词不定式作目的状语。 ? · 词汇搭配 ? ?struggle bravely 勇敢地斗争 ?struggle desperately 拼命地斗争,绝望地挣扎 ?struggle furiously 激烈地搏斗 ?struggle successfully 成功地作斗争 ?struggle wildly 疯狂地挣扎 ?struggle on 勉强支持下去,竭力维持下去 ? ?struggle against 与…作斗争
?struggle against difficulties 同困难斗争 ?struggle against tyranny 与暴政作斗争 ?struggle for 为…而斗争 ?struggle for a living 为生计而挣扎 ?struggle for freedom 为自由而斗争 ?struggle for independence 为独立而奋斗 ?struggle for recognition 为获得承认而奋斗 ?struggle in sb's arms (小孩)在母亲怀里挣扎 ?struggle through the snowstorm 冒着暴风雪行进 ?struggle to one's feet 挣扎着站起来 ?struggle with 与…作斗争 ? · 常用短语 ? struggle against(v.+prep.) 为反对…而斗争 oppose sth with difficulty ▲struggle against sb/sth He struggled against those who opposed his plan.他与那些反对他计划的人进 行了斗争。 In Chinese history the peasants kept struggling against the rule of the feudal class.在中国历史上,农民不断地与封建阶级的统治作斗争。 What is the use of trying to struggle against the system?力图反对这种制度有什么用? The swimmer struggled against the tide.游泳者逆流而上。 We must struggle against this prejudice for a more tolerant attitude to our beliefs.我们必须反对这种偏见,以争得对我们的信仰采取更为宽容的态度。 The workers have been struggling against bad conditions for too long.很久以来,工人们就在为反对恶劣的工作条件而进行斗争。
助动词的用法
助动词在英语学习当中作了解,不需要重点把握,但是助动词也是很好理解的,希望回答能够帮到你。 1.助动词:Be 助动词不能作述语动词,要与本动词一起构成动词片语,表示时态、语态等。 1. BE作为本动词表示状态或客观存在等意思。 Your house is bigger and nicer than mine. 你的房子比我的又大又好。 2. BE+不定词连用,表示约定、义务、命令等未来的动作或状态。 I am to go abroad on business tomorrow. 明天我要去外国出公差。 表示未来的安排。 The meeting is to be held as scheduled. 会议将按原计划召开。 表示计划好的安排。 You are not to bark at my friend. 你不许对我的朋友叫。 表示命令或要求。 3. BE+现在分词构成各种进行时态。 Who are you talking to? 你在和谁说话? I am talking to my dog. 我在和我的狗说话。 4. BE+过去分词构成被动语态。 That means I will be promoted as scheduled. 这就意味着我将要按原计划得到提升。 2. dare和used to 作为情态助动词的dare一般只能用于疑问句或否定句中,dare+原形动词表示敢。
I dare not say it is ugly. 我不敢说它丑。 How dare you say so? 你怎么敢这么说? dare也可以作本动词,用于肯定句,后面要接带to的不定词;主词若是第三人称单数,简单现在式时,dare要变为dares。 You, you dare to talk to me like this! 你、你竟敢这样和我讲话! used to+原形动词表示过去的习惯或状态,而现在已经不存在了。 You're not what you used to be. 你不是以前的你了。 used to构成疑问句时有两种形式。即used + 主词+ to + 其他成份?;Did + 主词+ use to+ 其他成份。 How used I to be? 我以前什么样? How did you use to be? 你以前什么样? used to构成否定句时有两种形式,即used not to和didn't use to。 You didn't use to say things like this. You used not to say things like this. 你以前不会说这样的话的。 be used to表示习惯于,其中used是形容词,to是介系词,后接名词、代名词或动名词等,可用于不同的时态。 You're used to hearing words of praise. 你是听好话听惯了。 3. 助动词:Do 1. DO作为助动词时的时态、人称和数的变化与它作为本动词相同,有do, does, did三种形式。 Yes, it seems he doesn't really want to have a haircut.
幼儿园大班主题精彩精彩活动汽车总动员
大班主题活动《汽车总动员》 常州市天宁区红梅东村幼儿园:庞洁叶丽敏 一、主题背景 随着现代文明的进展,汽车渐渐汽车进入了孩子们的生活:BRT快速公交车、层出不穷的车展、马路上的各种特种车、工作中的水泥搅拌车、而且许多的家庭还拥有了私家车等等,孩子们对汽车不再陌生,具备了一定的生活经验。同时,车子也因它自身会动、会响等特性,吸引了孩子们的目光,特别是男孩子,家里总有几部玩具汽车。我们随时都可以看见他们小小的身影蹲在地上专注地玩着车子。生活中,公共汽车、出租车、小轿车、工程车、救护车、消防车、警车等常常吸引出孩子们的注意力,车子的声音也给孩子们留下了深刻的印象,他们常会在一起模仿各种车子发出的特殊声音,并在这中模仿活动中乐此不疲。 经常发现孩子们在发表各种见解:有的说“BRT最方便了,我和爸爸到月星看家具,就坐了,又快又便宜。”有的说:“我们家里有小车,爸爸妈妈还带我自驾游呢。”有的说:“我爷爷脑溢血,救护车开得可快了。”有的说:“我见过水泥搅拌车,力气最大了,可以边开边运水泥呢。”……随着汽车时代的到来,汽车已经进入了人们的平常生活中,不再是简单的“行”了,而是渗入了人们的生活、休闲、运动等各个方面,这对孩子们来说,就是最好的教育资源啊。 自然、社会是一部真实、丰富的百科全书,向幼儿展示了具体、形象、生动的学习情境,生活即课堂,社会即学校,我们围绕“汽车”这一教育资源,有效地整合多方资源,根据我园特点与孩子们的兴趣与已有经验,我们开展实施了《汽车总动员》主题活动,帮助幼儿了解汽车基本结构,获得乘车经验,学习遵守交通规则,建构汽车社区,养成安全的乘车习惯等。 二、主题总目标 1.有效利用各种教育资源,帮助幼儿了解汽车的种类、基本结构等相关信息,能用完整连贯 的语言表达自己对汽车的认识。 2.运用多种手段,引导幼儿感受汽车在现实生活中的作用,体验汽车与人们生活的关系。 3.幼儿尝试用多种方式表达、表现与汽车相关的感受和体验,感受创造性活动的快乐。
(完整版)独立主格结构用法全解
独立主格结构 独立主格结构(Absolute Structure)是由名词或代词加上分词等构成的一种独立结构,用于修饰整个句子。独立主格结构中的名词或代词与其后的分词等构成逻辑上的主谓关系。这种结构与主句不发生句法上的联系,它的位置相当灵活,可置于主句前、主句末或主句中,常由逗号将其与主句分开。需特别注意的是,独立主格结构与主句之间不能使用任何连接词。 二、独立主格结构基本构成形式 名词(代词)+现在分词(过去分词;形容词;副词;不定式;名词;介词短语) 1. 名词(代词)+现在分词 Night enshrouding the earth, nobody could make out what the dark mass was from a distance. 黑夜笼罩大地,谁也看不清远处黑压压的一片是什么东西。 There being no bus, we had to walk home. 由于没有公共汽车,我们只好走回家。 2. 名词(代词)+过去分词 The workers worked still harder, their living conditions greatly improved. 由于工人们的生活条件大大提高,他们工作得更起劲了。 He was listening attentively in class, his eyes fixed on the blackboard. 他上课专心听讲,眼睛紧盯着黑板。 3. 名词(代词)+不定式 在“名词/代词+动词不定式”结构中,动词不定式和它前面的名词或代词如果存在着逻辑上的主谓关系,动词不定式则用主动的形式;如果是动宾关系,则用被动形式。 The four of us agreed on a division of labor, each to translate a quarter of the book. 我们四人同意分工干,每人翻译全书的四分之一。 Many trees, flowers, and grass to be planted, our newly-built school will look even more beautiful. 种上许多的树、花和草后,我们新建的学校看上去将更美。 4. 名词(代词)+形容词 Computers very small, we can use them widely. 电脑虽小,我们却能广泛地利用它们。 5. 名词(代词)+副词 The meeting over, our headmaster soon left the meeting room. 散会了,校长很快就离开了会议室。 The lights off, we could not go on with the work. 灯熄了,我们不能继续工作了。 6. 名词(代词)+名词 His first shot failure,he fired again. 他第一枪没击中,又打了一枪。 Two hundred people died in the accident, many of them children. 两百人死于事故,其中有许多儿童。 7. 名词(代词) +介词短语
不定式用法详解
不定式用法详解 定义:在句子中充当除了谓语以外的各种句子成分的动词形式叫做非谓语动词。 非谓语动词有三种:不定式,动名词,分词。 注:非谓语动词具有时态和语态的变化,可以同否定词not连用,构成否定形式,可以带宾语,状语,补语。非谓语动词的名词,形容词,副词的特征;可用在句中做主语,宾语,补语,状语,和定语等。 —不定式(原形动词前加to, 构成动词不定式。不定式不做谓语,属于非谓语动词) 不定式的时态,语态 一般式:不定式所表示的动作和谓语动词所表示的动作或状态同时发生或几乎同时发生或存在。但多数情况下是在谓语动词所表示的动作之后发生。 e.g :They often watch us play football. (同时) She hopes to go there again. (之后发生) 完成式:不定式所表示的动作或状态发生在谓语动词所表示动作或状态之前。 e.g : I’m glad to have seen your mother yesterday 注:1)用在intended, expected, meant, hoped. promised, wanted, planned. wished. thought, desired, was, were等后,表示过去没有实现的愿望,期待或计划的等,也用来表示先于谓语动词发生的动作或状态。 e.g: He wanted to have met (=had wanted to meet) you at the airport,but he didn’t get there in time. 他原想去机场接你(事情已经发生),但他没及时赶到那儿。(没接成) e.g: We planned to have done (had planned to do) good deeds for the poor people last month. 我们原计划上个月为贫困的人们作些好事。(没作成)。
助动词的用法
助动词 协助主要动词构成谓语动词词组的词叫助动词(Auxiliary Verb)。被协助的动词称作主要动词(Main Verb)。构成时态和语态。助动词是语法功能词,自身没有词义,不可单独使用,它没有对应的汉译,例如:He doesn't like English. 他不喜欢英语。(does是助动词,无词义;like是主要动词,有词义) 最常用的助动词有:be, have, do, shall, will, should, would 他们表示时态,语态,构成疑问句与否定副词not合用,加强语气助动词半助动词 2 半助动词 功能介绍 在功能上介乎主动词和助动词之间的一类结构,称为半助动词。常见的半助动词有be about to, be due to, be going to, be likely to, be meant to, be obliged to, be supposed to, be willing to, have to, seem to, be unable to, be unwilling to等。......情态助动词 情态助动词1.情态助动词包括will(would), shall(should), can(could), may(might), must, need, dare, ought to, used to, had better后接原形不定词。2.情态助动词不受主语的人称和数的限制。3.两个情态助动词不能连用。中文:他将能够及时完成此事。(误)He will can finish it i...... 3 基本助动词 基本助动词基本助动词只有三个:be, do, have, 他们没有词汇意义,只有语法作用,如协助构成进行体,完成体,被动态,否定句,疑问句等。例如He is giving a lecture. 他在作报告He has made a plan. 他已经订了计划The small animals are kept in the cages. 小动物都关在笼子里。 助动词协助主要动词完成以下功用 a. 表示时态,例如: He is singing. 他在唱歌。 He has got married. 他已结婚。 b. 表示语态,例如: He was sent to England. 他被派往英国。 c. 构成疑问句,例如: Do you like college life? 你喜欢大学生活吗? Did you study English before you came here? 你来这儿之前学过英语吗? d. 与否定副词not合用,构成否定句,例如: I don't like him. 我不喜欢他。 e. 加强语气,例如: Do come to the party tomorrow evening. 明天晚上一定来参加晚会。 He did know that. 他的确知道那件事。 3)最常用的助动词有:be, have, do, shall, will, should, would 4 具体用法 have的用法 一、have作助动词 形式 主要变化形式:have,has,had 动名词/现在分词:having 1)have +过去分词,构成完成时态,例: He has left for London.他已去了伦敦。
关于车辆总动员的活动方案
关于车辆总动员的活动方案 设计意图: 规则在生活中无处不在,我们生活在社会中需要遵守许许多多的规则,常识-中班综合活动:车辆总动员。帮助幼儿理解并遵守日常生活中的社会行为规则是《纲要》中提出的要求,中班幼儿处于规则意识形成的关键期,把握好这一时期培养幼儿良好的规则意识对于幼儿终生发展有着重大的意义。《纲要》中指出,教育活动“既符合幼儿的现实需要,又有利于其长远发展;既贴近幼儿的生活,选择感兴趣的事物或问题,又有助于拓展幼儿的经验和视野”。因此,此活动来源于生活,又能服务于幼儿的生活。 目标定位:活动的目标是教育活动的起点和归宿,对活动起着导向作用。中班幼儿行为以直觉行动性思维为主导,又处于“他率”到“自率”的过渡时期,根据幼儿年龄特点及行为特征确立目标为:了解常见车辆的名称及作用,认识常见的交通标记,在游戏中学习运用。能愉快地参与活动,在活动中懂得遵守规则。 活动目标: 1、了解常见车辆的名称及作用,认识常见的交通标记,在游戏中学习运用。
2、能愉快地参与活动,在活动中懂得遵守规则。 活动准备: 1、自行车、小轿车、摩托车、公共汽车、卡车等车辆标记小卡片若干,请幼儿自由选择一个标记贴在胸前。 2、把活动场地设计成马路,贴上各种交通标记。 活动过程: 一、认识各种车辆,并按标志分类 1、让幼儿说说自己的名称及用途 “呀,工厂里一下造了这么多车!你是什么车?有什么用?” 2、车子进入停车场,按标记分类停放 “我们一起停到停车场去吧?停车场在哪儿呢?”(认识停车场标志) “请车子们进入停车场后找到自己停的地方,幼儿教案《常识教案-中班综合活动:车辆总动员》。” 车子听音乐驶入停车场并按标记停放。 二、通过开车游戏认识交通标志 带领车辆驶上马路,沿途认识各个交通标志 “车辆们请注意了!上马路一定要遵守交通规则,我们出发了!” “看!前面路口有一个牌子,这是什么呀?”……(按顺序认识:红绿灯、人行横道、转弯、禁止鸣喇叭等交通标志) 三、韵律活动:车辆加油 1、进入加油站
独立主格用法详解
一、 独立主格结构是一个名词或代词(作为逻辑主语),加上一个形容词、副词、介词短语、分词、不定式等在句中作状语。它有以下三个特点: (1)结构的逻辑主语与句子的主语不同,它独立存在。 (2)名词或代词与后面的形容词、副词、介词短语、分词、不定式等存在逻辑上的主谓关系。 (3)独立主格结构一般用逗号与主句分开,但与主句之间不能使用任何连接词。 二、 英语中,的形式是:名词或代词跟形容词、副词、介词短语、非谓语动词连在一起,构成。 1.名词/ 代词+ 不定式。如: A house to be built, we must save every cent. 由于要建一座房子,我们必须节省每一分钱。 Now here is Li Lei, Wei Fang to come tomorrow. 现在李蕾来了,魏方明天到。 2.名词/ 代词+ -ing分词。如: The bus coming here soon, we should get everything ready. 汽车很快就要来了,我们应该把一切事情准备好。 Mother being ill, Li Lei was very worried. 母亲病了,李蕾非常焦急。 3.名词/ 代词+ 动词的过去分词。如: His cup broken, he used his bowl instead. 茶杯破了,他就用碗来代替。 4.名词/ 代词+ 形容词。如: The ground muddy, we should be careful. 地面泞泥,我们应该小心。 5.名词/ 代词+ 副词。如: The class over, we all went out to play. 下课后,我们都出去玩。 6. Glasses in his hand, he asked where his glasses were. 手里拿着眼镜,他问他的眼镜哪去了。 三、 在句子中作状语,表示时间、原因、条件和伴随等情况。 1.作时间状语 School over, the students went home. 放学后,学生们都回家了。 The ceremony ended, the games began. 仪式结束后,比赛开始了。 2.作条件状语 It being fine tomorrow, we’ll go boating. 如果明天天气好的话,我们就去划船。
初中英语10大词类详解+用法+考点(总结详细篇)
2020年初中英语10大词类详解+用法+考点(总结详细篇) 一、词性得分类 词类又叫词性,英语单词凭据其在句子中得功用,可以分红十个大年夜类。 1.名词 noun n. student 学生 2.代词 pronoun pron. you 你 3.形容词 adjective adj. happy 雀跃得 4.副词 adverb adv. quickly 敏捷地 5.动词 verb v. cut 砍、割 6.数词 numeral num. three 三 7.冠词 article art. a 一个 8.介词 preposition prep. at 在... 9.连词 conjunction conj. and 和 10.慨叹词 interjection interj. oh 哦 前六类叫实词,后四类叫虚词。 二、名词 名词单数得规则改变
名词得格 在英语中有些名词可以加“‘s”来示意所有关系,带这种词尾得名词形式称为该名词得所有格,如:a teacher’s book。 名词所有格得规则如下: (1)单数名词词尾加“'s”,单数名词词尾没有s,也要加“'s”,如the boy‘s bag 男孩得书包,men’s room 男厕所。 (2)若名词已有单数词尾-s ,只加“'”,如:the workers’ struggle工人得斗争。 三、代词 大年夜少数代词具有名词和形容词得功用。 英语中得代词,按其意义、特征及在句中得作用分为:人称代词、物主代词、指导代词、反身代词、彼此代词、疑问代词、关系代词、毗邻代词和不定代词九种。 人称代词得用法:
指导代词 指导代词分单数(this / that)和单数(these / those)两种形式,既可作限制词又可做代词。 疑问代词 指人:who, whom, whose 指物:what 既可指人又可指物:which 四、冠词 冠词是位于名词或名词词组之前或以后,在句子里首如果对名词起限制作用得词。冠词是一种虚词。 不定冠词a (an)与数词one 同源,是“一个”得意思。 定冠词得用法 定冠词the与指导代词this,that同源,有“那(这)个”得意思。 (1)特指双方都熟悉打听得人或物:Take the medicine.把药吃了。 (2)上文提到过得人或事:He bought a house. I’ve been to the house. (3)指世上独一物二得事物:the sun, the sky, the moon, the earth(敲黑板,这个是常常会在选择题中考到得常识点) (4)单数名词连用示意一类事物,如:the dollar 美元;the fox 狐狸;