基于卡尔曼滤波的汽车制动器试验台电机控制方法

控制技术
计算机测量与控制.2011.19(4) Com puter Measurement &C ontrol
869
收稿日期:2010 12 18; 修回日期:2011 02 02。
基金项目:2008广东省科技计划项目(2008B021300018);2010仲恺农业工程学院校级自然科学基金(G3100037)。
作者简介:吴东庆(1974 ),男,广西上林人,工学硕士,主要从事控制技术、模式识别等方向的研究。
文章编号:1671 4598(2011)04 0869 03 中图分类号:U467 52
文献标识码:A
基于卡尔曼滤波的汽车制动器试验台电机控制方法
吴东庆,杨逢建,巫钟伟,陈来凤,檀路生
(仲恺农业工程学院计算科学学院,广东广州 510225)
摘要:针对汽车制动器试验台电惯量补偿控制方法不够准确、稳定性不高的问题;分析飞轮组测控时序图,综合比较了多个相关电机惯量控制方法;在此基础上,研究自回归滤波器卡尔曼滤波理论,给出汽车制动台测控系统的状态向量、观测向量及相关的系统误差的定义;建立了电动机驱动电流依赖于观测量的卡尔曼滤波模型;模型以实测数据进行仿真计算,实验结果与传统测控方法相比,误差指标更好及系统更稳定;该控制方法可为制动器试验台能量补偿控制方法的改进提供参考。
关键词:汽车制动器试验台;能量补偿;卡尔曼滤波;自动控制
A Motor Control Method for Vehicles Brake Test Bed Based on Kalman Filter
Wu Do ng qing ,Yang Feng jian,Wu Zongw ei,Chen Laifeng,T an Lusheng
(Dept.of Co mputatio n Science,Zhong kai U niversity o f Ag riculture and Eng ineering ,G uang zhou 510225,China)
Abstract:Aim at problems ex isted in related veh icles brak e test bed research w hose con tr ol m ethod is not accurate en ou gh and lack of stability,sequen ce diagram of flyw heel s measu rement and control w as analysis.Related control m ethods w ere compared com prehensively.Based on it,th eory of Kalm an filter w hich is autoregressive has been dis cuss ed.We provide defin ition s of s tate vector,measu rem ent vector and relevant s ystem error.A specified Kalman filter model w as made.In the model,cu rrent of m otor depends on measu rements.The model w as simu lated w ith measu red data.According to test result,better index of error and stability w as acquir ed com pared w ith traditional meth ods.T he control method pr esents a reference for further im provement of b rak e test bed s research.
Key words :vehicles brake test b ed;energy compen sate;Kalman filter;Autom atic control
0 引言
0 1 制动器试验台的概念
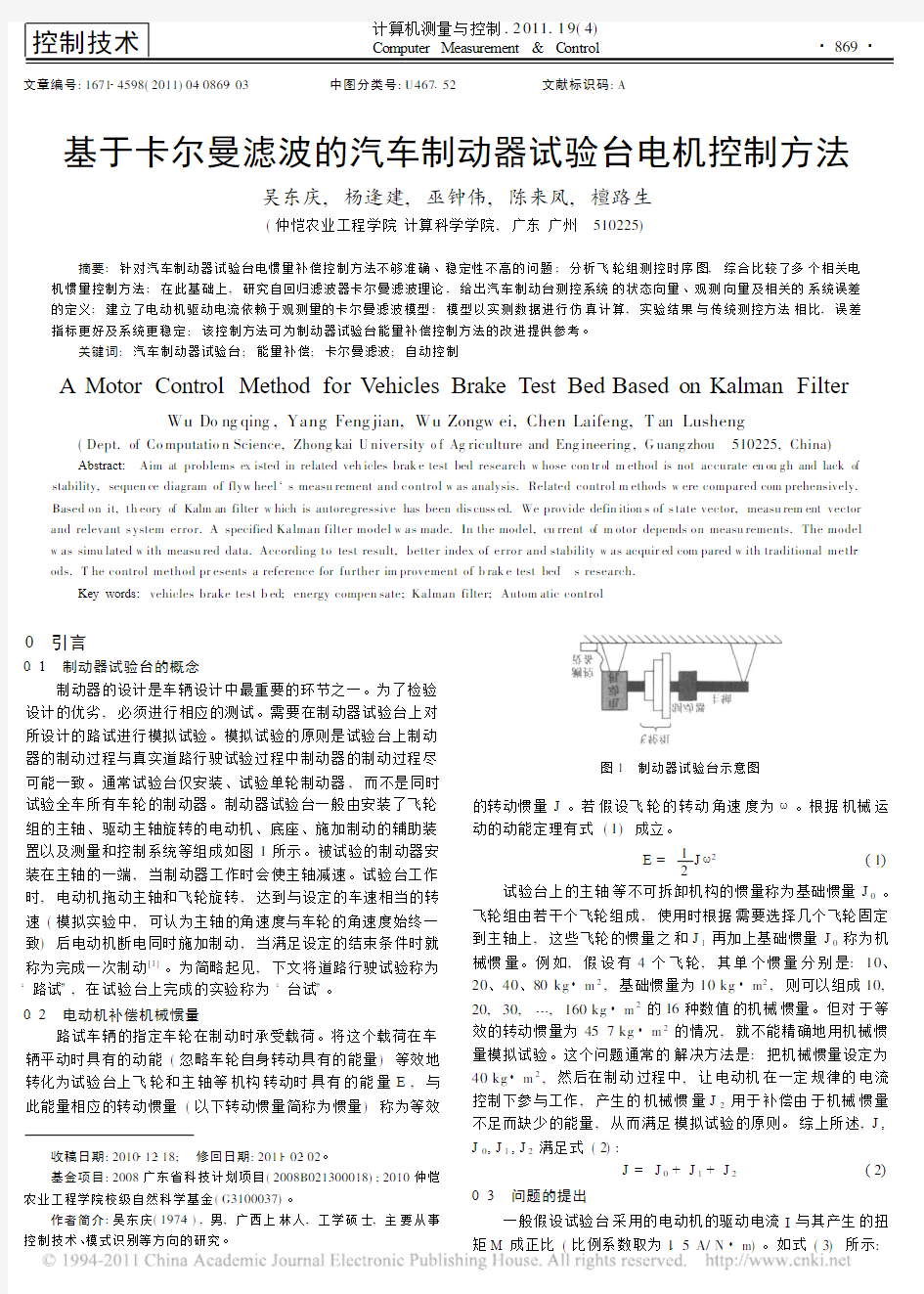
制动器的设计是车辆设计中最重要的环节之一。为了检验设计的优劣,必须进行相应的测试。需要在制动器试验台上对所设计的路试进行模拟试验。模拟试验的原则是试验台上制动器的制动过程与真实道路行驶试验过程中制动器的制动过程尽可能一致。通常试验台仅安装、试验单轮制动器,而不是同时试验全车所有车轮的制动器。制动器试验台一般由安装了飞轮组的主轴、驱动主轴旋转的电动机、底座、施加制动的辅助装置以及测量和控制系统等组成如图1所示。被试验的制动器安装在主轴的一端,当制动器工作时会使主轴减速。试验台工作时,电动机拖动主轴和飞轮旋转,达到与设定的车速相当的转速(模拟实验中,可认为主轴的角速度与车轮的角速度始终一致)后电动机断电同时施加制动,当满足设定的结束条件时就称为完成一次制动[1]。为简略起见,下文将道路行驶试验称为 路试 ,在试验台上完成的实验称为 台试 。
0 2 电动机补偿机械惯量
路试车辆的指定车轮在制动时承受载荷。将这个载荷在车
辆平动时具有的动能(忽略车轮自身转动具有的能量)等效地转化为试验台上飞轮和主轴等机构转动时具有的能量E ,与此能量相应的转动惯量(以下转动惯量简称为惯量)称为等效
图1 制动器试验台示意图
的转动惯量J 。若假设飞轮的转动角速度为 。根据机械运
动的动能定理有式(1)成立。
E =
12
J 2
(1)
试验台上的主轴等不可拆卸机构的惯量称为基础惯量J 0。
飞轮组由若干个飞轮组成,使用时根据需要选择几个飞轮固定到主轴上,这些飞轮的惯量之和J 1再加上基础惯量J 0称为机械惯量。例如,假设有4个飞轮,其单个惯量分别是:10、20、40、80kg m 2,基础惯量为10kg m 2,则可以组成10,20,30, ,160kg m 2的16种数值的机械惯量。但对于等效的转动惯量为45 7kg m 2的情况,就不能精确地用机械惯量模拟试验。这个问题通常的解决方法是:把机械惯量设定为40kg m 2,然后在制动过程中,让电动机在一定规律的电流控制下参与工作,产生的机械惯量J 2用于补偿由于机械惯量不足而缺少的能量,从而满足模拟试验的原则。综上所述,J ,J 0,J 1,J 2满足式(2):
J =J 0+J 1+J 2
(2)
0 3 问题的提出
一般假设试验台采用的电动机的驱动电流I 与其产生的扭矩M 成正比(比例系数取为1 5A/N m)。如式(3)所示:
870
计算机测量与控制 第19卷
I =1 5M
(3)
试验台工作时主轴的瞬时转速V i 与瞬时扭矩M i 是可观测的离散量。
由于制动器性能的复杂性,电动机驱动电流与时间之间的精确关系是很难得到的。工程实际中常用的自动控制方法是:把整个制动时间离散化为许多小的时间段,比如10ms 为一段,然后根据i -1时间段观测到的瞬时转速V i -1与/或瞬时扭矩M i-1,设计出i
时段驱动电流I i 的值,这个过程逐次进行,直至完成制动。各部件工作时序如图2所示。
图2 一个工作周期的制动台模拟实验测控时序图
评价控制方法优劣的一个重要指标是能量误差的大小,能量误差是指所设计的路试时的制动器与相对应的实验台上制动器在制动过程中消耗的能量之差。通常不考虑连续问题离散化所产生的误差。另外,飞轮的角速度及角加速度的误差也是评价指标之一。
综上,问题归纳为:根据之前观测到的瞬时转速与/或瞬时扭矩,设计i 时间段电流值的计算机控制方法,并对该方法进行评价。
0 4 相关研究
近年来,对于制动台的电机惯量控制方法,国内有如下相关研究。
典型一:文献[2]设计的电流控制方法准确把握了电动机驱动电流与主轴的瞬时扭矩、瞬时转速之间的内在联系,设计了一个试验台驱动电流反馈控制模型。模型主要思想是根据前i-1个周期的能量差异 W ,做线性插值,求出第i 周期应当电机补偿的做功电流。该方法简单易行,但测控效果受前面所有时段能量差的影响,即:前面所有周期中,系统和观测产生的误差将对当前周期产生影响。因此测控效果不甚理想。
典型二:文献[3]针对电惯量系统中传统PID 转速控制中的缺点,讨论单神经元及单神经元自适应控制方法,提出了基于单神经元自适应P ID 控制器的电惯量系统控制策略并以该控制器来改造转速环,建立了电惯量系统动态模型。模型取得了较好的控制效果。但在其他一些极限条件下,如转速较低、制动力矩过大,电惯量控制系统将不能很好地完成预期任务。以上方法并未考虑制动时制动器的制动力超过了地面所能给予车轮的最大附着力。车轮将按滑动方式运行,此时也提供了一定的制动力。此时相当于给系统施加了一个外力。还有众多因素可能导致制动力的改变,例如制动片受热后摩擦系数改变等因素。
因此,制动器试验台工作的复杂性以及噪音的存在,电流的调整通常并不能使得能量差达到最优,需要设计一个能最优
地对噪音进行滤波的自适应控制方法。
1 控制方法分析
1 1 模型选取
控制方法的主要工作是要对本时段的电流值作调整。调整量要朝着使能量差尽可能小的目标来进行。如果前面时段累计的能量损耗少于路试对应的时段的能量损耗,则本时段的电流要调大(相对上一时段),以加大扭矩做功。若前面时段的能量损耗大于路试对应时段的能量损耗,则本时段的电流要调小(相对上一个时段)。根据文献[4]的分析,可以假设干扰准确调整值的影响因素属高斯白噪声。因此笔者采用卡尔曼滤波来过滤噪音。
卡尔曼滤波是一种高效率的递归滤波器(自回归滤波器),它能够从一系列的不完全包含噪声的测量中,估计动态系统的状态[5]。它是一个最优化自回归数据处理算法。它广泛应用于机器人导航控制,传感器数据融合甚至在军事方面的雷达系统以及导弹追踪等。
卡尔曼滤波模型如图3所示:x 为状态向量,z 为观测向量,u 为系统输入。A,B,Q,H,R 为与系统相关的矩阵。w 与z 为噪音。
图3 卡尔曼滤波的模型
系统的状态方程:
d x /d t =A x +B u +w (4)
观测方程:
z =H x +v (5)
将式(4)和式(5)离散化处理,可将上式改写为如下状态方程和观测方程:
x (k)=A x (k -1)+B u (k)+w (k -1)(6)
z (k)=H x (k)+v(k)(7)
对上述方程运用卡尔曼滤波器,滤波器由以下算法步骤完
成。其中x ~(k)表示x (k)的预测值,x
^(k)表示x (k)的优化值。P (k)表示协方差。P ~(k)表示P (k )的预测值,P
^(k)表示P (k )的优化值。当前时段的优化值作为下一时段的预测值计算的基础。
算法步骤如下:
设定初始值x
^(0),u(1),w (0),k 1。 计算状态预测值
x ~(k )=A x
^(k -1)+B u(k)+w (k -1) 计算协方差预测值P ~(k)=P
^(k -1)+Q 计算卡尔曼增益系数K k =P ~
(k)H T (H P ~
(k)H T +R )-1
优化值x ^(k )=x ~
(k )+K k (Z(k)-H x ~(k))
协方差优化值P
^(k)=(I -K k H )P ~
(k)
如果未到达终点,k k +1,转到 ;否则结束。在上述算法中,随机信号w(k)和v(k)分别表示过程激励噪
第4期吴东庆,等:基于卡尔曼滤波的汽车制动器试验台电机控制方法 871
音和观测噪音。假设它们为相互独立,正态分布的高斯白噪音:p(w)~N(0,Q )p (v)~N(0,R ),计算过程中假设其方差为常数。1 2 模型建立
制动台转动部分的机械运动方程如(8)所示:
J d (t)d t =M
(8)
差分方程为:
J
(t)
t
=M (9)
根据前文给出的卡尔曼滤波模型,结合本问题,算法中各
变量(常量)定义(假设)如下:x (k)=( (k)M c (k)M m (k ))T 表示第k 时段的角速度、电机扭矩、制动扭矩。A 取为单位阵I ,B u(k)为状态控制量,在本问题中取为( (k)
M c (k)
0)T ,目的是通过调整电流扭矩
的增量 M c (k)使得k +1时段的能量差尽可能的小。从式(9)可推出 (k)与 M c (k )有函数关系:
(k)=
M (k )J t =M (k -1)+ M c (k)
J
t (10)
需补偿能量差 E 与 (k)、 M c (k)有如下关系:
M c 2+M c (k -1)+ (k -1) J t M c = E J t
2(11)
由式(11)可得:
M c (k)=
-
2-4
2
( =
M c (k -1)+ (k -1) J t , =- J t 2
)(12)即可以根据能量差 E 计算出 M c (k),具体计算中可根据实际意义舍去一根。结果代入式(10)可计算出 (k ),即为系统状态控制量:B u(k )=( (k)
M c (k)
0)T 。
第三个分量取0是因为假设制动力矩不发生改变(即使存在,实际影响已计入了噪音中,在滤波中已一并处理了)。
测量方程z (k)=H x (k)+v(k )中,观测向量z (k)= k M k ,二分量分别为瞬时角速度和总扭矩的观测值;H =10
011
。式中的R 为观测噪音v (k)的方差,Q 为过程激励
噪音w (k)的方差。
1 3 模型求解与仿真
基于前文的算法步骤及对电流补偿模型的讨论结果,可编制M atL ab 程序,流程图如图4所示。
运用该程序进行数值仿真,仿真参数如下:
初始转速514 33rpm,末转速257 17r pm,路试制动力距M m (0)=40,M c (0)=0。
即初始的x
^(0)= 0
M m
,P
^(0)=111
11
111
1
(初始协方差可任取非零数,迭代后会收敛到真值),瞬时速度用路试的速度加上噪音模拟得到;瞬时扭矩为路试力矩加上噪音。
2 实验结果及评价
2 1 实验结果
上述仿真参数代入程序中,根据文献[6]的数据,可以
图4 仿真流程图
计算得到台试与路试的能量差随时间的变化曲线,以及台试与
路试的角速度随时间的变化曲线(如图5所示)。
图5(a)是路试角速度及台试预测角速度的曲线对照图。图5(b)是路试能量差及台试能量差的曲线比照图。可以看出曲线在开始一小段范围(5个周期以内)有小的抖动,误差比较明显,这是因为设定的初值与实际值有较大出入而导致的震荡调整的状态。但在10个周期内很快就吻合了,表明卡尔曼滤波器很好地跟踪上了系统在高斯白噪音干扰下实际运行状态。这说明该控制方法具有很好的自适应补偿功能。
图5 台试与路试运动状态的比较
2 2 评价
一方面,对上述卡尔曼滤波器收敛速度与精度的分析。根据文献[7]给出的详细讨论,可知本控制方法能够满足此类滤波的实时性与精度要求。
另一方面,根据仿真得到实测数据与文献[7]中的数据做评价,亦从飞轮的能量差、角速度差、相对误差最短时间及稳定性4个方面进行。
(1)能量差:
(下转第883页)
第4期周圣林,等:军用飞机新型综合自动检测系统总体设计研究
883
的对应关系,完成L RU 被测信号的输入和激励信号的输出。(2)保证经其输入的测试信号符合测试程序的采集要求,输出的激励信号满足L RU 的激励需求。
(3)T U A 与L RU 的连接要保证测试与激励信号的可靠与准确的传输,并为测试功能扩展留有一定的备份。
(4)根据L RU 的数量和种类设计配置接口适配器,尽量减少T U A 的数量,根据
测试需求分析,实现多个L RU 共享一个T U A 。
图3 测试系统连接
(5)为了减少测试资源,必要时在T U A 内部对信号进
行预处理设计。
测试系统连接方式如图3所示。
3 结论
当前VX I 、PXI 、P CI 等通用测试仪器智能化及性能大幅提升,集成度更高,通用化、综合化的自动测试系统发展迅猛。本文针对军用飞机专用自动检测系统,开发和研究满足该类测试设备的实用性设计方法,运用网络化、分布式结构设计,增强了系统改进和升级能力,并提高了多机种机动维修保障能力和降低了后勤保障费用。
参考文献:
[1]国家军用标准.GJB5188 2003.飞机地面自动测试设备通用技术要
求[M ].北京:国防科工委军标出版发行社,2003.
[2]连光耀.面向装备测试性设计的信息建模及其描述方法研究[A].
武器装备综合保障信息化技术研讨会论文集[C].2009:140 144.[3]王海涛等.多路数据采集与网络远程传输系统实现[J ].计算机
测量与控制,2008,03.
(上接第871页)
能量是评价方法好坏的重要标准之一。从以上仿真图像得出路试、台试的动能随着时间变化的曲线,卡尔曼滤波通过噪音来减少误差,提高台试动能的准确性。由上图可知,台试与路试的动能差明显比第(3)问中的动能差小得多,跟路试更加接近。
(2)角速度差:
对速度差的拟合得到的统计数据如表1所示。
表1 速度差的统计数据
指标0~467ms 0~100ms 平均角速度差-0 008238848-0 00374标准误差0 0126297980 028289中位数-0 000923831-0 00552最小值-0 499540429-0 49954最大值
0 497350615
0 482229
由图5和表1统计的数据可知,与路试相比较,台试的角速度在头100ms 存在平均0 00374的误差,随着时间推移,角速度的误差逐渐缩小,其相对误差在合理的范围内。
(3)相对误差最短时间:由于
T K =min k >K
E k 理-E k 实
W k
<5%
此数值越小越好,在本次仿真实验中,T K =1 4896s,大概占总运行时间的26 4%。说明本控制方法在近3/4时间段内,相对误差控制在5%内。属于较优的预测效果。
(4)模型的稳定性:
实际过程中,模型的不稳定性是普遍存在的,这是由于: 人们往往采用模型简化的方法,用低维的系统近似描述高维系统; 对噪声及初值的统计特性建模不可能很准确; 由于运行环境的变化,系统元器件的老化及随机的强外部干扰,造
成了原来较准确的模型变得不准确。由于模型不稳定性的存
在,常导致通常的各种滤波器或自适应控制方法性能大大下降甚至发散(如文献[3])。然而,卡尔曼滤波是基于正交性原理的强跟踪滤波器,尽管是线性修正的滤波器,却可有效地克服这些模型的不稳定性。
3 结论
本文针对相关研究对汽车制动台电惯量补偿控制算法存在的不足,提出了将卡尔曼滤波运用于过滤观测与系统本身的噪音,控制电动机电流的方法。讨论了制动台系统的卡尔曼滤波数学模型。由于系统噪音属于高斯分布,计算出来的预测值和协方差精确到了二阶,使期望输出和实际输出之间的均方根误差达到最小。因此具有更高的精度和计算速度。通过对真实数据进行仿真模拟对比,结果表明,本控制方法具有较高的滤波精度和稳定性,对相关控制方法的设计有一定参考价值。
参考文献:
[1]杨丽英,李旗号,谢 峰.汽车制动器试验台飞轮组及其装卸系
统设计[J].组合机床与自动化加工技术,2008,(10):83 85.[2]王 尧,任 远,文 豪,等.制动器试验台补偿能量分配问题的
研究[J].机械工程与自动化,2010,159(2):87 89.
[3]李其治,王 涛,邹 杰.汽车制动器试验台的仿真分析[J ].
科学技术与工程,2010,18(10):4562 4569.
[4]周洪旋.制动器试验台电惯量系统控制方法研究[D].吉林大
学,2005.
[5]何 杰,袁 萍,何 伟.提高汽车制动台架试验检测精度[J].
轻型汽车技术,2003,168(8):29 31.
[6]维基百科.http://zh.w https://www.360docs.net/doc/785433967.html,/zh/卡尔曼滤波[EB/
OL ].2010 11 15.
[7]全国大学生数学建模竞赛赛题.https://www.360docs.net/doc/785433967.html, /html _
cn/block/8579f5fce999cdc896f78bca5d4f8237.html
[EB/OL ],
2010 11 10.
[8]Chui C K,C hen G.Kalman filterin g w ith realtime ap plication s
[M ].4th ed.Berlin:Springer-Verlag,2009:77 94.
瑞萨科技 (Renesas Technology) - 电机控制算法
BLDC电机控制算法 无刷电机属于自換流型(自我方向轉換),因此控制起来更加复杂。 BLDC电机控制要求了解电机进行整流转向的转子位置和机制。对于闭环速度控制,有两个附加要求,即对于转子速度/或电机电流以及PWM信号进行测量,以控制电机速度功率。 BLDC电机可以根据应用要求采用边排列或中心排列PWM信号。大多数应用仅要求速度变化操作,将采用6个独立的边排列PWM信号。这就提供了最高的分辨率。如果应用要求服务器定位、能耗制动或动力倒转,推荐使用补充的中心排列PWM信号。 为了感应转子位置,BLDC电机采用霍尔效应传感器来提供绝对定位感应。这就导致了更多线的使用和更高的成本。无传感器BLDC控制省去了对于霍尔传感器的需要,而是采用电机的反电动势(电动势)来预测转子位置。无传感器控制对于像风扇和泵这样的低成本变速应用至关重要。在采有BLDC电机时,冰箱和空调压缩机也需要无传感器控制。 空载时间的插入和补充 大多数BLDC电机不需要互补的PWM、空载时间插入或空载时间补偿。可能会要求这些特性的BLDC应用仅为高性能BLDC伺服电动机、正弦波激励式BLDC电机、无刷AC、或PC同步电机。 控制算法 许多不同的控制算法都被用以提供对于BLDC电机的控制。典型地,将功率晶体管用作线性稳压器来控制电机电压。当驱动高功率电机时,这种方法并不实用。高功率电机必须采用PWM控制,并要求一个微控制器来提供起动和控制功能。 控制算法必须提供下列三项功能: ● 用于控制电机速度的PWM电压 ● 用于对电机进整流换向的机制 ● 利用反电动势或霍尔传感器来预测转子位置的方法 脉冲宽度调制仅用于将可变电压应用到电机绕组。有效电压与PWM占空度成正比。当得到适当的整流换向时,BLDC的扭矩速度特性与一下直流电机相同。可以用可变电压来控制电机的速度和可变转矩。 功率晶体管的换向实现了定子中的适当绕组,可根据转子位置生成最佳的转矩。在一个BLDC电机中,MCU必须知道转子的位置并能够在恰当的时间进行整流换向。 BLDC电机的梯形整流换向 对于直流无刷电机的最简单的方法之一是采用所谓的梯形整流换向。
汽车性能台架实
实验1 整车性能台架实验 1.1 实验目的与要求 1.1.1 实验目的 通过该实验的动手操作,要求学生掌握汽车整车台架实验的主要内容,熟悉汽车 台架测量部分评价指标的方法,并加深对汽车评价参数的理解。 1.1.2 实验要求 1)掌握汽车台架实验的方法和原理; 2)掌握相关设备的操作,了解其主要功用及构造; 3)对所得测数据进行分析,判断; 4) 撰写实验报告。 1.2 实验场地与设备: 1.2.1 场地 测量实验室一间 1.2.2 设备: 1)底盘测功机; 2)实验车一辆; 3)冷却风扇。 1.3 测功机构造与工作原理 1.3.1 构造 汽车底盘测功机主要由道路模拟系统、数据采集与控制系统、安全保障系统及引 导系统等构成。普通型道路模拟系统如图 l所示。 1.3.2 工作原理 由电涡流测功机结构图可知,感应子主要由旋转部分和摆动部分(电枢和励磁线圈)组成。转子轴上的感应子形状犹如齿轮,与转子同轴装有一个直流励磁线圈。当励磁线圈组通以直流电流时,其周围便有磁场存在,那么围绕励磁组就产生一闭合磁通。很明显,位于绕组左侧的感应子具有一个极性,右侧具有相反的极性。旋转时,由于磁密值
的周期性变化而产生涡流,此涡流产生的磁场同产生它的磁场相互作用,从而产生与被试机反向的制动力矩,使电枢摆动,通过电枢上的力臂,将制动力传给测量装置。 转速测量采用非接触式磁电转速传感器和装于主轴的60齿牙盘,将转速信号转换成电信号输出。 1.4.1 实验内容与步骤 1.4.1 实验条件 环境温度:0-40°C;环境相对湿度小于85%;大气压力80-10kpa 1.4.2 实验车辆载荷 除有特殊规定外,轿车为规定乘员数的一半(取整数) 1.4.3 试验车辆应预热至正常工作温度,轮胎气压应符合汽车制造厂规定,左右轮胎 花纹应一致; 1.4.4 底盘测功机应进行预热; 1.4.5 记录环境温度等相关数据; 1.4.6 测量汽车各档位中车速和驱动力。 1.4.7 测量汽车各档位中车速与功率的数值 1.4.8 测量汽车某档位的外特性与部分负荷特性中功率与转矩的数值。 1.5 实验注意事项 1.5.1 每次实验前必须详细预习实验指导书,明了实验目的、原理方法及操作步骤;
发动机台架试验 -可靠性试验
学生实验报告实验课程名称:发动机试验技术
目录 一、试验目的 二、试验内容 1.试验依据 2.试验条件 3.试验仪器设备 4.试验样机 5.试验内容与方案 (1)交变负荷试验 (2)混合负荷试验 (3)全速负荷试验 (4)冷热冲击试验 (5)活塞机械疲劳试验 (6)活塞热疲劳试验 三、试验进度安排 四、试验结果的提供
摘要 国外在可靠性试验方面己做了许多有益的研究工作,但到目前为止尚未形成统一的试验方法,而且考虑到该试验的非普遍性及技术保密性,将来也不可能形成统一的试验规范。相对于热疲劳研究状况来讲,国内对机械疲劳的研究还比较少。为适应发动机比功率和排放法规日益提高的苛刻要求,发动机面临着更高机械负荷和热负荷的严峻考验。国内高强化发动机最大爆发压力已超过22 Mpa。活塞的机械疲劳损伤主要体现在销孔、环岸等部位。活塞环岸、销座及燃烧室等部位由于在较高的工作温度下承受着高频冲击作用的爆发压力,润滑状况较差,摩擦磨损,其他破坏可靠性的腐蚀磨损(缸套一环换向区、排气门/排气门座锥面等)、疲劳磨损(挺杆、轴瓦、齿轮表面等)、微动磨蚀(轴瓦钢背、飞轮压紧处、飞轮壳压紧处、湿缸套止口处等)、电蚀(火花塞电极等)和穴蚀(水泵叶轮等)这些都是可靠性试验的主要目标,也是实施可靠性设计、试验研究的重点部位。 众所周知,在内燃机整机上进行零部件可靠性试验成本昂贵。本文将参照原有的可靠性试验方法,通过看一些关于可靠性的零部件加速寿命实验技术制定一种评价内燃机可靠性的考核规范,包括活塞机械疲劳试验和活塞热疲劳试验,可迅速做出其可靠性恰当的评价,可以降低研发成本、缩短研发时间。 一、试验目的 1通过理解内燃机可靠性评估,评定发动机的可靠性。 1.1了解评估的多种理论方法,如数学模型法、上下限法、相似设备法、蒙特卡洛法、故障分析( 包括故障模式影响分析和故障树分析) 等。并掌握故障分析法。 1.2学会可靠性试验评估,为进行可靠性设计奠定基础理论,为发动机及相关零部件提供测试、验证以及改进的技术支持。 2掌握可靠性试验方法 2.1掌握内燃机可靠性综合性试验及专项试验。综合性试验的考核对象是零件的可靠性、零件表面性状的变化和发动机性能的保持性;专项试验是超水温( 耐热性) 、超负荷、混合负荷、交变负荷循环、超爆发压力、超速等试验。 二、试验内容 1试验依据 参考的试验标准: GB /T 19055-2003 汽车发动机可靠性试验方法 GB /T 18297-2001 汽车发动机性能试验方法 JB/T 5112-1999 中小功率柴油机产品可靠性考核 2试验条件 一般试验条件: 2.1燃料及机油:采用制造厂所规定的牌号,柴油中不得有消烟添加剂。
19 IR_IRMCK F171-灵活易用的电机控制芯片
IRMCK/F171-灵活易用的电机控制芯片 IRMCK/F171 灵活易用的电机控制芯片
国际整流器公司 2012-1-11
内容
? 概述 概 ? 传统方案存在的问题 ? IR的解决方案:简单易用的电机控制 芯片IRMCF171 ? 方案辅助工具和测试结果 ? 结论
概述
? 全球能源短缺导致越来越严格的政府节能规章出 台 ? 在中国 能效标签制度的实施以及能效标准的不 在中国,能效标签制度的实施以及能效标准的不 断提高使很多电器转向变频控制 ? 变频空调已经完全确立了市场的主导地位 ? 家电的变频化趋势也越来越明确,电机调速市场 竞争将更加激烈,产品更新的周期越来越短。随 之而来的新产品研发风险也越来越大 之而来的新产品研发 险也越来越大 ? 节能热点:
– – – – 高效率永磁电机 无位置传感正弦波控制 宽的调速范围 低的振动和噪声
传统方案存在的问题
? ? ? ? 大容量存储单元的高速DSP或32位单片机 软件算法复杂,控制器计算任务繁重 软件算法复杂 控制器计算任务繁重 对于传统的软件编程控制方案,完成电机控制算法已经很复杂, 对于系统设计人员的要求很高
1. 2. 3. 熟悉实时的FOC控制算法,熟悉相关的外设; 熟悉DSP或32位RISC的C或汇编语言编程; 熟悉各种数模混合电路,高压电路和功率开关电路.
?
?
开发周期长,开发成本和开发风险都很高
后续的软件维护成本高
电机控制系统框图
IR电机控制IC-IRMCF171
PID算法在无刷直流电机调速电路中的应用
PID算法在无刷直流电机调速电路中的应用 摘 要:在分析了无刷直流电机闭环速度控制方案的基础上,针对PID算法在无刷直流电机应用中出现的种种问题,给出了相应的解决方法,提出了非线性变速 积分PID算法,成功地解决了在低采样周期时PID算法的积分饱和问题。 直流电机具有良好的调速性能,如无级调速、调速范围宽、低速性能好、高起动转矩、高效率等。无刷直流电机由于采用电子换向,PWM调速,在进一步提高直流电机性能的同时又克服了直流电机机械换向带来的一系列问题,从而大大延长了电机的使用寿命,近年来已广泛应用于家电、汽车、数控机床、机器人等领域。 1、无刷直流电机的速度控制方案 对无刷直流电机转速的控制即可采用开环控制,也可采用闭环控制。与开环控制相比,速度控制闭环系统的机械特性有以下优越性:闭环系统的机械特性与开环系统机械特性相比,其性能大大提高;理想空载转速相同时,闭环系统的静差 率(额定负载时电机转速降落与理想空载转速之比)要小得多;当要求的静差率相同时, 闭环调速系统的调速范围可以大大提高。无刷直流电机的速度控制方案如图1所示。 无刷直流电机控制器可采用电机控制专用DSP(如TI公司的TMS320C24X 系列、AD公司的ADMCxx系列),也可采用单片机+无刷直流电机控制专用集成电路的方案。前者集成度高,电路设计简单,运算速度快,可实现复杂的速度控制算法,但由于DSP的价格高而不适合于小功率低成本的无刷直流电机控制器。后者虽然运算速度低,但只要采用适当的速度控制算法,依然可以达到较高的控制精度,适合于小功率低成本的无刷直流电机控制器。 摩托罗拉公司的第二代无刷直流电机控制专用集成电路MC33035,集成了转子位置传感器译码器电路、脉宽调制电路(PWM)、功率输出驱动电路、限流电路,可以实现无刷直流电机速度开环系统的全部控制功能。系统中采用了一片MC33035、一片低成本的单片机AT89C2051、串行输入A/D、串行输出D/A 以及由MOSFET型场效应管组成的功率驱动电路,无刷电机控制逻辑和保护由MC33035完成,单片机用来完成转速设定值的获取、转速反馈的实时采样以及速度控制算法的实现。
汽车简式减振器台架试验方法
减振器台架试验及评定方法 主题和范围:本方法规定了PLD 汽车悬架用筒式减振器的台架试验和试验件评定方法。 本方法包含筒式减振器的示功试验、速度特性试验、温度特性试验、耐久性试验。 1 示功试验 目的:测取试件的示功图和速度图。 设备:PLD 系列微机控制电液伺服汽车减振器试验台。 条件: 1.3.1 试件温度:20士2℃。 1.3.2 试件试验行程S :(100±1)mm 。 1.3.3 试件频率n :(100±2) c 、p 、m 。 1.3.4 速度ν根据和并由下式决定的减振器活塞速度。 (m/s)520106 4.n S π=???=-ν 1.3.5 方向:铅垂方向。 1.3.6 位置:将减振器拉伸至最大行程并测定其行程中间位置A m ,并纪录。 试验方法 1.4.1 按加振,待f P 、y P 微机显示值稳定后,停止试验并记录相应得数值。 f P …………复原阻力,N ; y P …………压缩阻力,N ; 评定 1.5.1 示功图应丰满、圆滑,不得有空程、畸形等。 1.5.2 减振器在示功试验中,不得有漏油和明显的噪声等异常现象。 1.5.3 复原阻力和压缩阻力应符合附录A 要求,复原阻力和压缩阻力的允差值应符合下式规定: 复原阻力的允许差值为±(14%f P +40)N ,f P —额定复原阻力; 压缩阻力的允许差值为±(14%y P +40)N ,y P —额定压缩阻力; 2 速度特性试验 目的:检测减振器在不同活塞速度下的阻力,取得试件的速度特性。 设备:PLD 系列微机控制电液伺服汽车减振器试验台。 温度条件: 试件温度:20±2℃ 试件试验行程S :20~100 mm ,速度)/(.s m 520=ν;最高速度须高于1.5 m /s 。 方向:铅垂方向。 位置:A m 。 试验方法:本方法采用多工况合成法测试速度特性P 一v 曲线 每个测点工况皆按本标准实施; 最后如图4所示取得试验速度特性:
发动机台架试验
昆明理工大学交通工程学院学生实验报告实验课程名称:发动机试验技术
目录 一、试验目的 二、试验内容 1.试验依据 2.试验条件 3.试验仪器设备 4.试验样机 5.试验内容与方案 (1)交变负荷试验 (2)混合负荷试验 (3)全速负荷试验 (4)冷热冲击试验 (5)活塞机械疲劳试验 (6)活塞热疲劳试验 三、试验进度安排 四、试验结果的提供 摘要 国外在可靠性试验方面己做了许多有益的研究工作,但到目前为止尚未形成统一的试验方法,而且考虑到该试验的非普遍性及技术保密性,将来也不可能形成统一的试验规范。相对于热疲劳研究状况来讲,国内对机械疲劳的研究还比较少。为适应发动机比功率和排放法规日益提高的苛刻要求,发动机面临着更高机械负荷和热负荷的严峻考验。国内高强化发动机最大爆发压力已超过22 Mpa。活塞的机械疲劳损伤主要体现在销孔、环岸等部位。活塞环岸、销座及燃烧室等部位由于在较高的工作温度下承受着高频冲击作用的爆发压力,润滑状况较差,摩擦磨损,其他破坏可靠性的腐蚀磨损(缸套一环换向区、排气门/排气门座锥面等)、疲劳磨损(挺杆、轴瓦、齿轮表面等)、微动磨蚀(轴瓦钢背、飞轮压紧处、飞轮壳压紧处、湿缸套止口处等)、电蚀(火花塞电极等)和穴蚀(水泵叶轮等)这些
都是可靠性试验的主要目标,也是实施可靠性设计、试验研究的重点部位。 众所周知,在内燃机整机上进行零部件可靠性试验成本昂贵。本文将参照原有的可靠性试验方法,通过看一些关于可靠性的零部件加速寿命实验技术制定一种评价内燃机可靠性的考核规范,包括活塞机械疲劳试验和活塞热疲劳试验,可迅速做出其可靠性恰当的评价,可以降低研发成本、缩短研发时间。 一、试验目的 1通过理解内燃机可靠性评估,评定发动机的可靠性。 1.1了解评估的多种理论方法,如数学模型法、上下限法、相似设备法、蒙特卡洛法、故障分析( 包括故障模式影响分析和故障树分析) 等。并掌握故障分析法。 1.2学会可靠性试验评估,为进行可靠性设计奠定基础理论,为发动机及相关零部件提供测试、验证以及改进的技术支持。 2掌握可靠性试验方法 2.1掌握内燃机可靠性综合性试验及专项试验。综合性试验的考核对象是零件的可靠性、零件表面性状的变化和发动机性能的保持性;专项试验是超水温( 耐热性) 、超负荷、混合负荷、交变负荷循环、超爆发压力、超速等试验。 二、试验内容 1试验依据 参考的试验标准: GB /T 19055-2003 汽车发动机可靠性试验方法 GB /T 18297-2001 汽车发动机性能试验方法 JB/T 5112-1999 中小功率柴油机产品可靠性考核 2试验条件 一般试验条件: 2.1燃料及机油:采用制造厂所规定的牌号,柴油中不得有消烟添加剂。 2.2磨合:按制造厂规定的磨合规范进行。 2.3冷却系温度:水冷机的冷却液的出口温度控制在361 K±5K,必要时可减少温度允差。 2.4机油温度:按制造厂的规定或控制在368 K±5K,必要时可减少温度允差。2.5燃料温度:柴油温度控制在311 K±5K;汽油温度控制在298 K±5K。 2.6排气背压:按制造厂的规定或低于6.7 k Pa。 2.7发动机标准进气状态
电机控制算法
电机控制算法 电机控制算法的作用是接受指令速度值,通过运算向电机提供适当的驱动电压,尽快地和尽快平稳地使电机转速达到指令速度值,并维持这个速度值。换言之,一旦电机转速达到了指令速度值,即使在各种不利因素(如斜坡、碰撞之类等使电机转速发生变化的因素)的干扰下也应该保持速度值不变。为了提高机器人小车控制系统的控制精度,选用合适的控制算法显得十分必要。控制算法是任何闭环系统控制方案的核心,然而并非越复杂、精度越高的算法越好,因为比赛要求非常高的实时性,机器人必须在非常短的时间内作出灵敏的反应,所以现代的一些先进控制算法,比如模糊控制、神经元网络控制等就不能应用到小车控制系统里。本系统选用了最常规、最经典的PID控制算法,通过实际应用取得了很好的效果。 1 比例项 控制回路中的第一个偏差转换环节就是比例项。这一环节简单地将偏差信号乘以常数K 得到新的CV值(值域为-100~100)。基本的比例控制算法如下: loop: PV=ReadMotorSpeed() Error=SP-PV CV=Error*Kprop Setpwm(cv) Goto loop 上一段程序中的SetPWM()函数并非将CV值作为绝对的PWM占空比来对待。否则,不断降低的偏差值会使输出值接近零,而且由于电机工作时需要持续的PWM信号,控制系统将会使电机稳定在低速运转状态上,从而导致控制系统策略失败。 相反,CV值一般被取作当前PWM占空比的改变量,并被附加到当前的PWM占空比上。这也要求SetPWM()函数必须将相加后得到的PWM占空比限制在0%~100%。正的CV值将使电机两端电压增加。负的CV值将使电机两端电压降低。如果CV值等于0,则无需改变但前占空比。较低的K 值会使电机的速度响应缓慢,但是却很平稳。较高的K 值会使速度响应更快,但是却可能导致超调,即达到稳定输出前在期望值附近振荡。过高的K 值会导致系统的不稳定,即输出不断震荡且不会趋于期望值。 2 微分项 任何变量的微分项被用来描述该变量是如何相对于另一个变量(多位时间)变化的。换句话说,任何变量的微分项就是它随时间的变化率。如位移随时间的变化率是速度。速度相对于时间的微分是加速度。 在PID控制器中,值得关心的是偏差信号相对于时间的微分,或称变化率。绝大多数控制器将微分项定义为: Rate=(E-E )/T 式中,E为当前偏差,E 为前次偏差值,T为两次测量的时间间隔。负的变化率表明偏差信号的改善。当微分项被具体应用于控制器中时,将一个常数乘以该微分项,并将它加到比例项上,就可以得到最终的CV值计算公式: CV=( K E)+( K Rate) 当偏差信号接近零时,CV值将为负,所以当偏差信号开始改善时,微分项的作用将逐渐减弱校正输出量。在某些场合下,微分项还有利于超调量的消除,并可以允许使用较大的K 值,从而可以改善响应的快速性。微分环节还预示了偏差信号的变化趋势。当控制对象对控制器的输出响应迟缓时,微分环节的作用尤为明显。 含有微分项的控制算法的伪代码实现如下: loop:
纯电动汽车驱动电机应用概述
纯电动汽车驱动电机应用概述 郑金凤 胡冰乐 张翔 (福建农林大学机电工程学院,福建 福州 350002) 摘 要:介绍了目前纯电动汽车的发展状况,叙述了纯电动汽车驱动电机不同类型的特点及相关的控制方法。还介绍了一些目前应用比较广泛的驱动电机控制方法的主要内容及其所解决的相关问题。 关键词:纯电动汽车 驱动电机 矢量控制 直接转矩控制 中图分类号:TP202 文献标识码:A Driving Motor for Electric Vehicles Application Overview Zheng Jinfeng Hu Bingle Zhang Xiang (College of Mechanical and Electronic Engineering,Fujian Agriculture and Forestry University,Fuzhou 350002,China) Abstract: the current state of development of electric vehicles and features of the electric vehicles are described.Otherwise,driving motors and its control methods are narrated. Also major contents of some driving motor control methods applied extensively at present and its related issues are discussed. Key words:Electric vehicle,Drive motor,Vector control,Direct Torque Control 引言 由于环境保护越来越受消费者和政府的重视,以及能源价格的不断上涨,使得世界的汽车制造商都纷纷加大开新能源汽车开发力度。在去年金融危机的影响下,今年以来,由于全球大多主流的汽车市场纷纷出现衰退,尤其以美国和日本为代表的两大汽车市场出现了急剧下滑,使得美国和日本汽车厂家不得不加速原本保守的计划,从而重新刺激美国和日本等原有核心市场。而电动汽车以电能为能源,具有零排放无污染的突出优点,因此备受汽车界的推崇。在中国,政府今年也不断的推出各种政策来促进纯电动汽车的发展。回顾一下国际上电动汽车的发展史,连这次至少有四次,世界汽车工业界要启动纯电动汽车,但是前三次都失败了。前三次失败主要是因为电池。前三次基本上都是以铅酸电池为基础,由于他的比能量和比价格都比较差,所以没有得到推广。现在随着电池技术的不断发展,使得纯电动汽车的推广得以实现。现在纯电动汽车主要采用的是锂电池,锂电池的比能量是铅酸电池的八到十倍,且质量轻。今年比亚迪、丰田、奇瑞等汽车公司都将推出各自的纯电动汽车。并且电动汽车将可能慢慢成为汽车发展的一种趋势和必然[1,2,3]。 1各种电动汽车驱动电机的性能[4-11] 纯电动汽车关键的难点重点在于电池技术和驱动电机。电池技术已经在一定程度上得到了突破。下面主要讨论一下驱动电机的相关状况。 1.1电动汽车驱动电机控制的关键问题 电动汽车是以车载电源为动力,并采用电动机驱动的一种交通工具。电机及其驱动系统是电动汽车的核心部件之一,由于电动汽车在运行过程中频繁起动和加减速操作,对驱动系统的有着很高的要求。下面主要阐述控制过程中的一些关键问题: (1)用在电动汽车的电动机应具有瞬时功率大、过载能力强(过载3~4倍)、加速性能好,使用寿命长的特点。 (2)电动汽车用电动机调速范围应该宽广,包括恒转矩区和恒功率区。要求在低速运行时可以输出大恒定转矩,来适应快速起动、加速、负荷爬坡等要求;高速时能够输出恒定功率,能有较大的调速范围,以适应平坦的路面、超车等高速行驶要求。
智能车速度控制pid(电机闭环控制算法)
智能车速度控制pid(电机闭环控制算法) 对于智能车的电机闭环控制算法,我之所以标题没有写上智能车电机PID闭环控制算法是因为PID 算法根本就不是特别好的适用于智能车这种变化很快的系统,对于智能车,电机的调速可以说是时时刻刻再进行调速控制的,我上面说描述的经典PID 算法,都是针对一些惰性系统,也就是说是变化比较慢的系统的,所以对于智能车的电机调速采用完完整整的PID 算法,是根本不可取的,及时采用了,你必须要经过一些变换和改进才能使用。以上的简述只是鄙人自己的看法,如有错误,请各位高手指正。现在估计您会疑问,PID 不适用于智能车的电机控制,那什么才适用呢? 鄙人原来做过智能车,从鄙人本身的理解,P 算法控制电机,也就是比例控制是最好的,反应速度快,控制精度高,不存在积分和微分效应,非常适用于适用于控制周期短的系统,当然,对于一些特殊的逻辑控制算法,可能要采用PD算法,用微分来做补偿,防止震荡和超调。下面来说下电机控制算法从开始的加入到最终的确定的方法: 当然这一切的前提就是安装了编码器,车速有反馈,只有加上编码器,有了反馈,才能组成一个闭环系统。当然您也可以加上码盘,或者霍尔开关等一切可以返回车速的东西都可以。 (1)首先建议在车速比较慢的时候,采用PID 算法来控制电机,为什么开始要建议您采用PID 呢?主要是为了让您更加深刻理解PID 算法的精髓和调试步骤方法等,有助于以后对控制算法更加深入的研究和书写。调试PID 三个参数的方法,很多地方都提供了,我在这里简单的说下:首先将ID 参数都变为0,先调整P 比例参数,调整到速度基本上跟您给定的速度差不多,也就是说基本稳定在您给定的脉冲数,当然这个时候会非常的震荡,不要担心,接下来调整I,调整I 的结果就是震荡会消除很多,但是车速会变化缓慢,也就是说会有一些延迟,然后再调整D,调整D 的结果就是增强调节的灵活性和预见性,在给定速度变化的过程中,能够以一个平稳过渡来变换,而且速度可以长时间稳定在给定速度附近,然后PID 三个参数的基本范围就确定了,然后再根据实际的跑车来微调这些参数,当然在您调试PID之前,请仔细阅读PID 理论知识,这样有助于您的调试和理解,
汽车性能台架实
汽车性能台架实
————————————————————————————————作者:————————————————————————————————日期:
实验1 整车性能台架实验 1.1 实验目的与要求 1.1.1 实验目的 通过该实验的动手操作,要求学生掌握汽车整车台架实验的主要内容,熟悉汽车 台架测量部分评价指标的方法,并加深对汽车评价参数的理解。 1.1.2 实验要求 1)掌握汽车台架实验的方法和原理; 2)掌握相关设备的操作,了解其主要功用及构造; 3)对所得测数据进行分析,判断; 4) 撰写实验报告。 1.2 实验场地与设备: 1.2.1 场地 测量实验室一间 1.2.2 设备: 1)底盘测功机; 2)实验车一辆; 3)冷却风扇。 1.3 测功机构造与工作原理 1.3.1 构造 汽车底盘测功机主要由道路模拟系统、数据采集与控制系统、安全保障系统及引 导系统等构成。普通型道路模拟系统如图 l所示。 1.3.2 工作原理 由电涡流测功机结构图可知,感应子主要由旋转部分和摆动部分(电枢和励磁线圈)组成。转子轴上的感应子形状犹如齿轮,与转子同轴装有一个直流励磁线圈。 当励磁线圈组通以直流电流时,其周围便有磁场存在,那么围绕励磁组就产生一闭
合磁通。很明显,位于绕组左侧的感应子具有一个极性,右侧具有相反的极性。旋转时,由于磁密值的周期性变化而产生涡流,此涡流产生的磁场同产生它的磁场相互作用,从而产生与被试机反向的制动力矩,使电枢摆动,通过电枢上的力臂,将制动力传给测量装置。 转速测量采用非接触式磁电转速传感器和装于主轴的60齿牙盘,将转速信号转换成电信号输出。 1.4.1 实验内容与步骤 1.4.1 实验条件 环境温度:0-40°C;环境相对湿度小于85%;大气压力80-10kpa 1.4.2 实验车辆载荷 除有特殊规定外,轿车为规定乘员数的一半(取整数) 1.4.3 试验车辆应预热至正常工作温度,轮胎气压应符合汽车制造厂规定,左右轮胎 花纹应一致; 1.4.4 底盘测功机应进行预热; 1.4.5 记录环境温度等相关数据; 1.4.6 测量汽车各档位中车速和驱动力。 1.4.7 测量汽车各档位中车速与功率的数值 1.4.8 测量汽车某档位的外特性与部分负荷特性中功率与转矩的数值。
最新电机SpTA控制算法资料
电机SpTA控制算法 SpTA即Steps per Time algorithm,它与步进电机S形曲线控制算不同,S形曲线控制算法思想是根据电机的步数来计算时间,即所谓的Time per Steps,该控制算法先计算电机每一步运行频率,再根据运动曲线计算得到时间参数,而SpTA算法则是以时间计算为中心,根据时间来计算运动步数相关参数,它的做法是将电机的运动时间分割成若干个合适的小时间片,在每个时间片内它都将速度参数加到位置参数上,如果位置参数溢出,它就会输出一个脉冲,速度参数根据加速度参数和时间而改变,随着时间推移,速度参数越来越大,位置参数溢出频率越来越高,则电机的运行频率也越来越高错误!未找到引用源。。为了实现根据速度参数控制脉冲输出频率,需要定义以下变量: PosAccumulator 位置累加器 PosAdd 位置增加值 ActualPosition 实际位置 TargetPosition 目标位置,用户输入步进电机运动的步数 在时间片到来后进行如下计算: PosAccumulator += ActualVelocity; //位置累加器+实际速度 PosAdd = PosAccumulator >> 17; //移位,判断速度累加器是否溢出 PosAccumulator -= PosAdd << 17; //位置累加器去掉溢出部分 if(PosAdd!=0) //位置累加器溢出,产生一个不进脉冲 { ActualPosition+=1; 产生一个步进脉冲; } 这样控制器输出的脉冲频率就随着实际速度的增大而增高,随着实际速度减小而降低。为了根据时间实现实际速度的变化,需要定义以下变量: VelAccumulator 速度累加器 ActualAcceleration 实际加速度,用户设定的加速度数值 VelAdd 速度增加值 ActualVelocity 实际速度
电动汽车电机控制器原理
电动汽车电机控制器 一、电机控制器的概述 根据GB/T 18488.1-2001《电动汽车用电机及其控制器技术条件》对电机控制器的定义,电机控制器就是控制主牵引电源与电机之间能量传输的装置、是由外界控制信号接口电路、电机控制电路和驱动电路组成。 电机、驱动器和电机控制器作为电动汽车的主要部件,在电动汽车整车系统中起着非常重要的作用,其相关领域的研究具有重要的理论意义和现实意义。 二、电机控制器的原理 图1 汽车电机控制器原理图 电机控制器作为整个制动系统的控制中心,它由逆变器和控制器两部分组成。逆变器接收电池输送过来的直流电电能,逆变成三相交流电给汽车电机提供电源。控制器接受电机转速等信号反馈到仪表,当发生制动或者加速行为时,控制器控制变频器频率的升降,从而达到加速或者减速的目的。 三、电机控制器的分类 1、直流电机驱动系统 电机控制器一般采用脉宽调制(PWM)斩波控制方式,控制技术简单、成熟、成本低,但效率低、体积大等缺点。 2、交流感应电机驱动系统 电机控制器采用PWM方式实现高压直流到三相交流的电源变换,采用变频调速方式实现电机调速,采用矢量控制或直接转矩控制策略实现电机转矩控制的快速响应。
3、交流永磁电机驱动系统 包括正弦波永磁同步电机驱动系统和梯形波无刷直流电机驱动系统,其中正弦波永磁同步电机控制器采用PWM方式实现高压直流到三相交流的电源变换,采用变频调速方式实现电机调速;梯形波无刷直流电机控制通常采用“弱磁调速”方式实现电机的控制。由于正弦波永磁同步电机驱动系统低速转矩脉动小且高速恒功率区调速更稳定,因此比梯形波无刷直流电机驰动系统具有更好的应用前景。 4、开关磁阻电机驱动系统 开关磁阻电机驱动系统的电机控制一般采用模糊滑模控制方法。目前纯电动汽车所用电机均为永磁同步电机,交流永磁电机采用稀土永磁体励磁,与感应电机相比不需要励磁电路,具有效率高、功率密度大、控制精度高、转矩脉动小等特点。 四、电动控制器的相关术语 1、额定功率:在额定条件下的输出功率。 2、峰值功率:在规定的持续时间内,电机允许的最大输出功率。 3、额定转速:额定功率下电机的转速。 4、最高工作转速:相应于电动汽车最高设计车速的电机转速。 5、额定转矩:电机在额定功率和额定转速下的输出转矩。 6、峰值转矩:电机在规定的持续时间内允许输出的最大转矩。 7、电机及控制器整体效率:电机转轴输出功率除以控制器输入功率再乘以100%。 扩展阅读: WP4000变频功率分析仪应用于电动汽车电机试验 现行的电动汽车相关标准大全 如何选择电动汽车电池监测系统 hb
电动汽车用电机控制策略分析
电动汽车用电机控制策略分析摘要 第一章绪论 1.1引言 1.2电动汽车的定义及优势 1.2.1电动汽车的定义 1.2.2电动汽车的优势 1.3电动汽车的基本结构 1.4本论文选题的意义及主要内容 1.4.1选题的意义 1.4.2本文的主要内容 第二章电动汽车电机驱动系统介绍 2.1电动汽车驱动电机分类 2.2电机驱动系统系统构成与布置方式 2.3电动汽车中电动机类型及其驱动系统 2.4电动汽车电机驱动控制的发展现状和趋势 第三章交流感应电动机及其控制策略 第四章无刷直流电动机及其控制策略 第五章永磁同步电动机及其控制策略 5.1永磁同步电机的结构和特点 5.2永磁同步电机矢量控制理论 5.2.1电动机的转矩控制 5.2.2 PMSM坐标变换 5.2.3 PMSM数学模型 5.2.4电流极限圆和电压极限圆 5.3永磁同步电动机恒转矩控制
5.3.1id =0控制 5.3.2最大转矩/电流比控制 5.3.3恒磁链控制 5.3.4 cosφ=1控制 5.4永磁同步电动机弱磁控制 第六章全文总结与展望 摘要 第一章绪论 1.1引言 在未来的一段时间内,我国将成为世界最大的汽车消费国,2010年我国汽车增加到五千六百万辆以上,不过空气污染源也会大幅度提高,空气污染将有64%来自于汽车尾气的排放,在2020年左右,我国石油消费量将超过4.5亿吨,而我国能源系统效率平均低于国际先进水平10%,但是我国60%石油消费量依赖于进口,要是仍然采用传统的内燃机技术发展汽车工业将会使我国为此付出巨大代价和对环境保护也会造成巨大的压力。在这种严峻的形势下,我国汽车工业的未来发展需要我们好好思考。 根据现在世界人口和汽车的增长趋势来看,今后50年中,世界人口和汽车数量分别从60亿增加到100亿和7千万增加到2亿5千万辆以上。若这些车辆都采用内燃机,能源需求和空气污染将会给人类造成巨大的压力和损坏。因此我们必须开发节能环保型以及高效智能型的交通车辆,只有这样才能在本世纪实现交通的可持续发展。能源危机曾经对世界经济带来严重影响,因此石油毕源的争夺更加强烈,石油纠纷在国际上也不断发生,甚至为了争夺石油资源而爆发的战争在近几年也不断发生。因此石油资源的解决是当今世界每个国家所面临的首要考虑的问题,石油资源解决的好坏是当今世界是否稳定的重要因素。 电动汽车是将机算机、电子与化学各学科领域中的高新技术于一体,是汽车、计算机、电力拖动、新材料、新能源、功率电子、自动控制、化学电源等工程技术中最新成果的集成产物。混合动力电动汽车、燃料电池汽车和纯电动汽车对世界汽车的发展以及环境的保护都起到一个前所未有的阶段,具有里程碑的意义。 1.2电动汽车的定义及优势 我国政府已将电动汽车的快速发展列入我国“十五”国家863计划,加大了对电动汽车开发和产业化的投入,与世界发达国家电动汽车发展接轨,目前已经取得了一定得成就。我国不少高等院校、相关的研究以及国内部分企业都加强了对电动汽车研究开发的力度,加快了汽车事业的发展速度。目前我国纯电动汽车研发比较顺利,可以小批量生产与应用;与此同时混合动力汽车的发展目前它的产业化也可以说具备条件;值得炫耀的是我国的燃料电池汽车研发目前达到国际先进水平。因此我国建立电动汽车产业,逐步实施车用能源动为系统转型,实现节能环保目标奠定了技术基础。 1.2.1电动汽车的定义 电动汽车是指以车载电源为动力,用全部或部分由电机驱动,并配置大容量电能储存装置,符合道路交通、安全法规各项要求的车辆 1.2.2电动汽车的优势 现如今各国都在发展电动汽车事业,是由于它具有以下几个方面的优点:
汽车球头销台架试验标准解读
前言 本标准以符合国家标准和行业标准为前提,在立足市场需求和产品性能的实际情况下指定的。同时在格式和内容编排上均符合GB/T1.1-2000和 GB/T1.2-2002规定。 本标准由XXXX机械有限公司提出 本标准由XXXX机械有限公司归口 本标准起草单位:XXXX机械有限公司 标准起草人:XXX
汽车球头销台架试验标准 1 范围 本标准规定了XX公司悬架使用的球销节(以下简称“球销总成”)的有关台架试验的方法和技术要求。 本标准适用于XX公司的所有汽车悬架球销总成。 2 规范性引用文件 下列文件中的条款通过标准的引用而成为本标准的条款。凡是注日期的引用文件,其随后的修改单(不包括勘误的内容)或修订版均不适合与本标准,然而,鼓励根据本标准达成协议的各方研究是否可以使用这些文件的最新版本,凡是不注日期的引用文件,其最新版本适用用本标准。 GB/T 7762-2003 硫化橡胶或热塑性橡胶耐臭氧龟裂静态拉伸试验 JIS K 6301 硫化橡胶的物理试验方法 3 目的 本标准的目的是使球销总成的性能、强度和耐久性试验的试验方法标准化,以便得到评定质量的统一方法。 4 试验种类 (1)摆角试验 (2)力矩试验 (3)刚度试验 (4)挤压和拉伸强度试验 (5)球头销静态强度试验 (6)疲劳强度试验
(7)工作温度下的耐磨持久性试验 (8)高温下的耐磨持久试验 (9)耐泥水持久性试验 (10)防尘罩耐臭氧试验 (11)防尘罩低温试验 (12)防尘罩耐热性试验 (13)防尘罩拉伸强度试验 5 试验的一般条件 试验条件一般适用于上面列举的所有试验,内容如下; (1)除非另有规定,试验应在常温常压下进行; (2)试验件应固定在刚度足够大的装置上,这样才不会消弱试验目的; (3)安装夹具的形状应不影响试验目的; 6 球销总成试验方法 6.1 摆角试验 这个试验是测量球销的工作摆角,按如下方法进行 6.1.1 试验装置 如图1所示,把销总成安装在试验夹具上 6.1.2 试验条件 测量方向:如图1所示,使球头销铅垂直立,沿A方向和A方向垂直的B方向进行测量。
(整理)发动机台架实验.
发动机台架试验 一、试验目的及作用 目的:1、掌握发动机试验方法。 2、 3、 4、根据数据分析发动机的工作状况,判断发动机性能,寻求最佳工况。 作用:发动机各项性能指标、参数及各类特性曲线都是在发动机试验台架上按规定的试验方法进行测定的。 二、试验对象 本田125cc发动机(排量:1.5L;最大功率:4.8kW;最大扭矩:3.8N·M) 三、试验设备 1.试验台装置(图1); 2.辅助装置:a、可调水量冷却系统 b、专用油量测量装置 c、通风装置 d、消声地 坑; 3.制动测功装置—测功器 (1)水力测功器(2)平衡式电力测功器(3)电涡流测功器
四、试验方法-试验条件要求 试验方法要求 1 进气 尽可能使用原车用的进气系统,改变进气系统时,注意以下参数不能变动:(1)进气管直径 (2)原车用中冷器压力降△p或根据指定值 (3)增压器压气机前的进气真空度<5kPa (4)曲轴箱通风系统符合发动机技术要求 2 排气 尽可能使用原车用的排气系统,如果涡轮后的条件有变化,须保持指定的排气背压(通常要求涡轮后排气背压≤10kPa,有特殊要求的除外)。 3 燃油输送 在试验过程中,喷油泵进油管中不允许有气泡;过量的燃油根据技术要求回流,输油管中不能出现压力波动。 4 冷却系统 (1)节温器阀固定在全开位置(有特别要求的除外)。 (2)试验间的冷却系统要保证原车用冷却液的流量和系统的压力。 5 附件设备 不安装或全部脱开(有特别要求的除外)。 6 试验用油 按照技术要求选择,燃油的密度变化应小于参考值的±0.6% 。
测试条件要求 1 大气状况 从试验开始,至少每小时测量一次大气压力和进气湿度。 2 温度控制 (1)压气机前的进气温度25℃(国家标准的标准进气状态) (2)喷油泵进口的燃油温度38±2℃ (3)出水温度88±5℃(国家标准)。 (4)中冷后温度(全负荷工况): ?标定转速:49±2℃?最大扭矩转速:40±2℃ ?45%标定转速:37±2℃? 900r/min(或者低端转速):33±2℃ 3 在稳定状况下测量 在每个测量点,记录数据前,要保证所有的参数达到稳定。 五、试验时间及地点 时间:四月初(具体时间待定) 地点: 麓谷发动机台架试验室 六、试验人员 司明鑫、危红媛、季武威、赵吉瑞、夏涛 七、实验内容(GB/T 18297-2001 汽车发动机性能试验方法 1.规定了汽车用发动机性能台架试验方法,包括各种负荷下的动力性及经济性试验方法,无负荷下的起动、怠速、机械损失功率试验方法以 及有关气缸密封性的活塞漏气量及机油消耗量试验方法。 2.对主要测试仪表的精度要求 ?扭矩:误差不大于所测发动机最大扭矩的±1% ?转速:误差不大于所测值的±0.5% ?燃油消耗量:误差不大于所测值的±) 1.发动机负荷特性实验 1.实验目的: 1.掌握发动机负荷特性的试验方法 2.熟悉所用设备、仪表 3.学会数据采集整理以及绘制曲线 4.判断发动机性能,并应用 2.实验原理:保持发动机转速不变的情况,通过改变发动机负荷得到的发动机性能,包括油耗、功率、排气温度等参数。在规定的转速、不同的负荷下评定
汽车球头销台架试验标准
、尸■、■ 前言 本标准以符合国家标准和行业标准为前提,在立足市场需求和产品性能的实际情况下指定的。同时在格式和内容编排上均符合GB/T1.1-2000 和GB/T1.2-2002 规定。 本标准由XXXX 机械有限公司提出本标准由XXXX 机械有限公司归口本标准起草单位:XXXX 机械有限公司标准起草人:XXX
汽车球头销台架试验标准 1 范围 本标准规定了XX 公司悬架使用的球销节(以下简称“球销总成” )的有关台架试验的方法和技术要求。 本标准适用于XX 公司的所有汽车悬架球销总成。 2 规范性引用文件 下列文件中的条款通过标准的引用而成为本标准的条款。凡是注日期的引用文件,其随后 的修改单(不包括勘误的内容)或修订版均不适合与本标准,然而,鼓励根据本标准达成协议的各方研究是否可以使用这些文件的最新版本,凡是不注日期的引用文件,其最新版本适用用本标准。 GB/T 7762-2003 硫化橡胶或热塑性橡胶耐臭氧龟裂静态拉伸试验 JIS K 6301 硫化橡胶的物理试验方法 3 目的 本标准的目的是使球销总成的性能、强度和耐久性试验的试验方法标准化,以便得到评定 质量的统一方法。 4 试验种类 (1)摆角试验 (2)力矩试验 (3)刚度试验
(4)挤压和拉伸强度试验 (5)球头销静态强度试验 6)疲劳强度试验 7)工作温度下的耐磨持久性试验 (8)高温下的耐磨持久试验 (9)耐泥水持久性试验 (10 )防尘罩耐臭氧试验 (11 )防尘罩低温试验 (12 )防尘罩耐热性试验 (13 )防尘罩拉伸强度试验 5 试验的一般条件 试验条件一般适用于上面列举的所有试验,内容如下; (1)除非另有规定,试验应在常温常压下进行; (2)试验件应固定在刚度足够大的装置上,这样才不会消弱试验目的; (3)安装夹具的形状应不影响试验目的; 6 球销总成试验方法 6.1 摆角试验 这个试验是测量球销的工作摆角,按如下方法进行 6.1.1 试验装置 如图 1 所示,把销总成安装在试验夹具上 6.1.2 试验条件 测量方向:如图 1 所示,使球头销铅垂直立,沿 A 方向和 A 方向垂直的 B 方向进行测量