太阳能电池建模matlab
1.太阳能电池建模
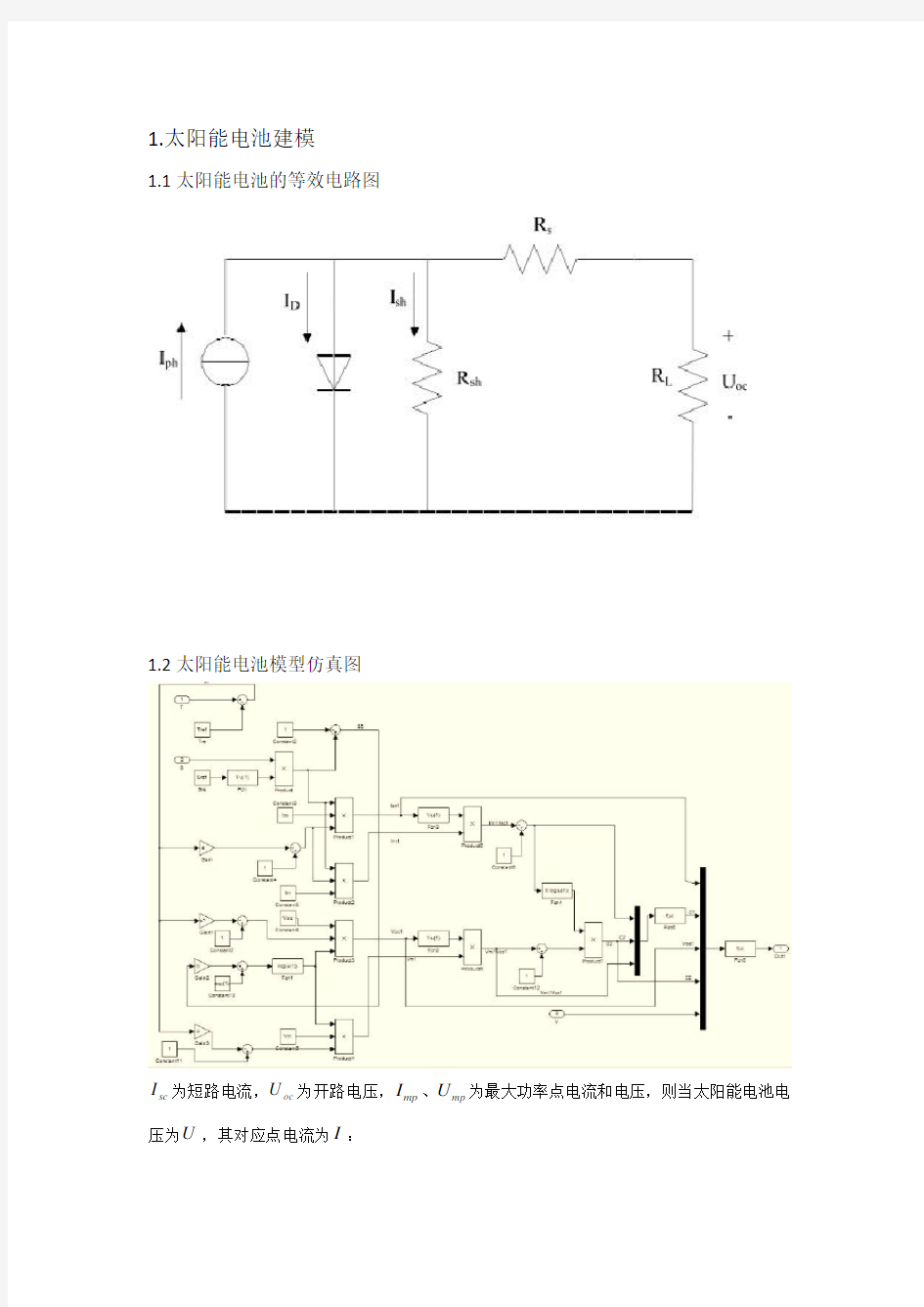
1.1太阳能电池的等效电路图
1.2太阳能电池模型仿真图
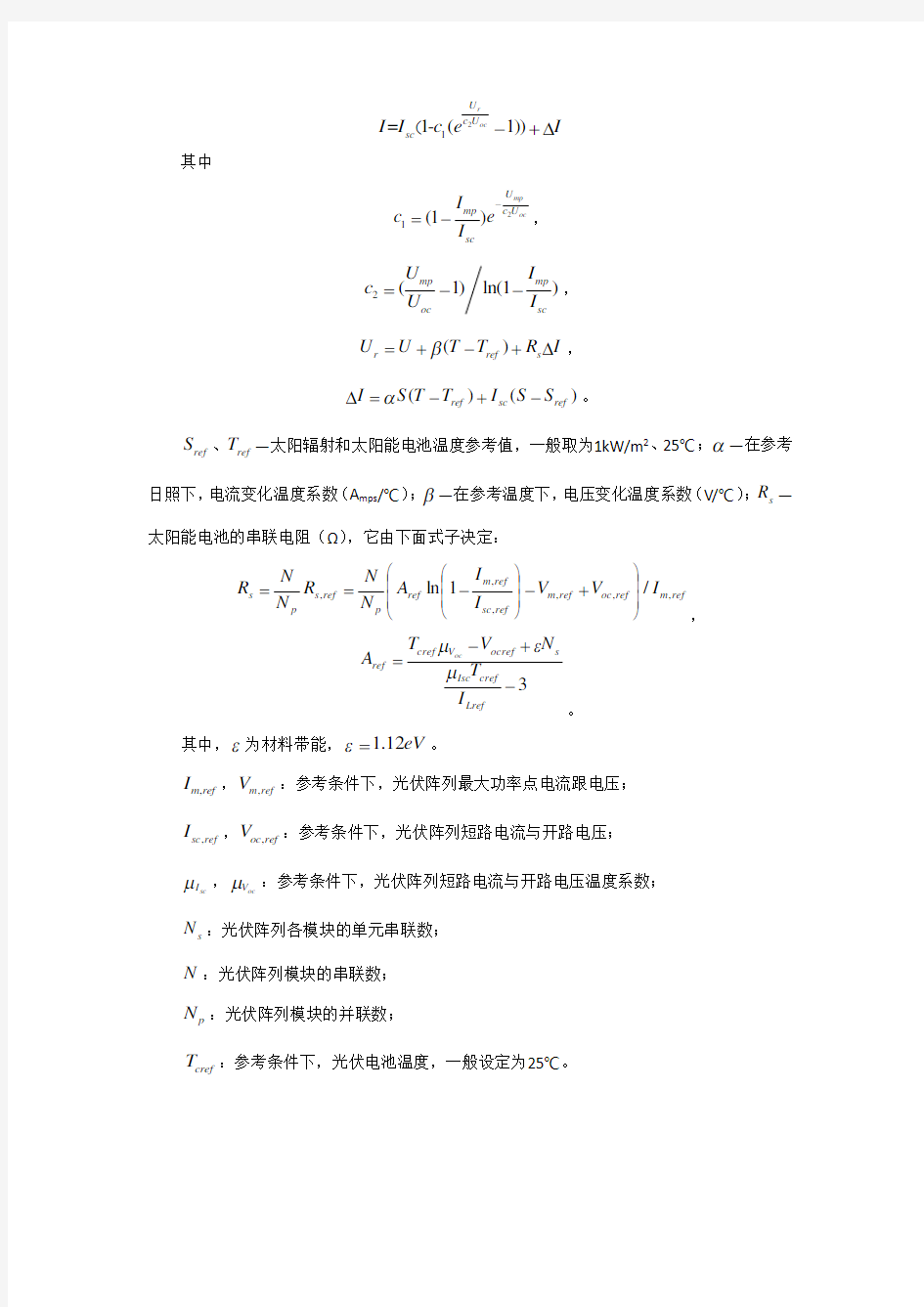
sc I 为短路电流,oc U 为开路电压,mp I 、mp U 为最大功率点电流和电压,则当太阳能电池电
压为U ,其对应点电流为I :
21=1-(1))r
oc
U c U sc
I I c e I -+?(
其中
21(1)m p oc
U m p c U sc
I c e I -
=-,
2(
1)ln(1)m p m p oc
sc
U I c U I =--,
()r ref s U U T T R I β=+-+?, ()()ref sc ref I S T T I S S α?=-+-。
ref S 、ref T —太阳辐射和太阳能电池温度参考值,一般取为1kW/m 2
、25℃;α—在参考
日照下,电流变化温度系数(A mps /℃);β—在参考温度下,电压变化温度系数(V/℃);s R —太阳能电池的串联电阻(Ω),它由下面式子决定:
ref m ref
oc ref
m ref sc ref
m ref
p ref
s p
s I V V I I A N N R N
N R ,,,,,,/1ln ???? ??+-???
?
??-==
,
3
-+-=
Lref
cref Isc s
ocref V cref ref I T N V T A oc μεμ。
其中,ε为材料带能,eV 12.1=ε。
r e f m I ,,ref m V ,:参考条件下,光伏阵列最大功率点电流跟电压; r e f sc I ,,ref oc V ,:参考条件下,光伏阵列短路电流与开路电压; sc
I μ,oc
V μ:参考条件下,光伏阵列短路电流与开路电压温度系数;
s N :光伏阵列各模块的单元串联数; N :光伏阵列模块的串联数; p N :光伏阵列模块的并联数;
cref T :参考条件下,光伏电池温度,一般设定为25℃。
1.3太阳能电池的参数
下面表格是太阳能电池各个参数的意义
名称 Im Um Uoc Isc Sref
Tref a b Rs 单位 A
V
V
A
2
/m
KW
℃
Amps/℃
V/℃
Ω
意义 最大功率电流 最大功率电压 开路电压
短路电流 太阳辐射参考值
太阳能电池温度
在参考日照下,电流变化温度系数
在参考温度下,电压变化温度
输出串联
电阻
2.MPPT算法
2.1 MPPT算法的总体模型
上图所示是MPPT算法的总体模型,我们通过对MPPT模块的替换,就可以实现对不同的MPPT算法进行仿真研究。下面是几种常用算法的仿真。
2.11开路电压法算法的具体模型
其中要把负载处开路
2.13扰动观察法算法的具体模型
2.15恒压控制法算法的具体模型
2.2 波形比较
25摄氏度下,3种方法MPPT波形图比较蓝色曲线:扰动法观擦法
黄色曲线:开路电压法
紫色曲线:恒压控制法
50摄氏度下,3种方法MPPT 波形图比较 蓝色曲线:扰动法观擦法 黄色曲线:开路电压法 紫色曲线:恒压控制法
3.各种方法的优缺点
3.1恒定电压法
缺点:实现精度差,存在严重的功率振荡,温度对光伏电池开路电压的影响较大,测量开路
电压要求光伏阵列断开负载后再测量,对外界条件的适应性差,环境变化时不能自动跟踪到MPP ,造成了能量损失
优点:控制方法简单容易实现,初期投入少。
3.2开路电压法
缺点:如何选择最佳的比例常数
1
k 却很困难,因为
1
k 是由光伏阵列的物理特性所决定的,
随太阳能电池板日益老化而变化,而且由于测量开路电压oc
U 需要将负载断开,导致
存在瞬时功率损失问题。而且系统的功率输出并不是基于对光伏阵列输出功率计算而得,而是假设一旦开路电压
oc
U 确定相应的最大功率点电压
MPP
U 也就确定了,其功
率输出也就是最大。这样如果最大功率点的选取不准确,就会导致输出功率并不是最
大的功率(从图中可以看出,比最大攻略略低)。
优点:方法原理简单,结构简单,价格低廉,受温度变化影响较小。
3.3扰动观察法
缺点:还是存在功率振荡的现象和受温度变化的影响。
优点:提高方法不难实现,现在被普遍使用,而且跟踪精度较高,受温度变化的影响程度不大。
现代信号处理Matlab仿真——例611
例6.11 利用卡尔曼滤波估计一个未知常数 题目: 设已知一个未知常数x 的噪声观测集合,已知噪声v(n)的均值为零, 方差为 ,v(n)与x 不相关,试用卡尔曼滤波估计该常数 题目分析: 回忆Kalman 递推估计公式 由于已知x 为一常数,即不随时间n 变化,因此可以得到: 状态方程: x(n)=x(n-1) 观测方程: y(n)=x(n)+v(n) 得到A(n)=1,C(n)=1, , 将A(n)=1,代入迭代公式 得到:P(n|n-1)=P(n-1|n-1) 用P(n-1)来表示P(n|n-1)和P(n-1|n-1),这是卡尔曼增益表达式变为 从而 2v σ1??(|1)(1)(1|1)(|1)(1)(1|1)(1)()()(|1)()[()(|1)()()]???(|)(|1)()[()()(|1)](|)[()()](|1)H w H H v x n n A n x n n P n n A n P n n A n Q n K n P n n C n C n P n n C n Q n x n n x n n K n y n C n x n n P n n I K n C n P n n --=----=----+=--+=-+--=--2()v v Q n σ=()0w Q n =(|1)(1)(1|1)(1)()H w P n n A n P n n A n Q n -=----+21 ()(|1)[(|1)]v K n P n n P n n σ-=--+22(1)()[1()](1)(1)v v P n P n K n P n P n σσ-=--=-+
实验一 基于Matlab的控制系统模型
实验一 基于Matlab 的控制系统模型 姓名 学号 班级 一、实验目的 1) 熟悉Matlab 的使用环境,学习Matlab 软件的使用方法和编程方法。 2) 学习使用Matlab 进行各类数学变换运算的方法。 3) 学习使用Matlab 建立控制系统模型的方法。 二、实验原理 1. 香农采样定理 对一个具有有限频谱的连续信号f (t )进行连续采样,当采样频率满足ωs ≥ωmax 时,采样信号f *(t )能无失真的复现原连续信号。 (1) 作信号f (t )=5e 10t 和f *(t ) =5e 10kT 的曲线,比较采样前后的差异。 0.05 0::0.5 5*(10*) subplot(2,1,1) plot(,) grid subplot(2,1,2) stem(,) grid T t T f exp t t f t f ===- 请改变采样周期T ,观察不同的采样周期下的采样效果。
(2) 频谱曲线 50:1:50 5./(100.^2) (,)w F sqrt w plot w F grid =-=+ 若|F (j ωmax ) |=0.1|F (0)|,选择合理的采样周期T 并验加以证。 400:20:400 200 2*/05/*(1./(100.^2)) 15/*(1./(100().^2)) 25/*(1./(100().^2)) (,0,,1,,2) w ws Ts pi ws F Ts sqrt w F Ts sqrt w ws F Ts sqrt w ws plot w F w F w F grid =-===+=+-=++ 请改变采样频率,观察何时出现频谱混叠? 2. 拉式变换和Z 变换 (1) 使用Matlab 求函数的拉氏变换 拉式变换: 反拉氏变换: ()()()()()()2 222 1exp -*123*exp -*4sin *5exp -*s 11/(1) 21/()31/4/() 51/(*(2)*(*c 3)o ) s *yms syms a w t f a t laplace f f t f t a t f s a f s ilaplace f f s a f s f w s w f s s s w t f a t w t ==+==+====++== (2) 使用Matlab 求函数的Z 变换 Z 变换: 反Z 变换:
数学建模(Matlab)
数学规划作业(MatLab) 1、某厂向用户提供发动机,合同规定,第一、二、三季度末分别交货40台、60台、80台.每季度的生产费用为()2 =+ f x ax bx (单位:元), 其中x是该季度生产的台数.若交货后有剩余,可用于下季度交货,但需支付存储费,每台每季度c元.已知工厂每季度最大生产能力为100台,第一季度开始时无存货,设a=50、b=0.2、c=4,问:工厂应如何安排生产计划,才能既满足合同又使总费用最低.讨论a、b、c变化对计划的影响,并作出合理的解释. 解: 问题的分析和假设: 分析: 问题的关键在于由于工厂的生产能力足以满足每个季度用户的需求,但是为了使总费用最少,那么利用每个季度生产费用的不同,可用利用上个生产费用低的季度多生产来为下个季度进行准备,前提是本月节省下的费用减去总的发动机存储费用还有剩余,这样生产才有价值,才可能满足合同的同时又能使总费用最低。基本假设:1工厂的生产能力不受外界环境因素影响。2为使总费用最低,又能满足合同要求,各个季度之间的生产数量之间是有联系的。3第一季度开始时无存货。4工厂每季度的生关费用与本季度生产的发动机台数有关。5生产要按定单的数量来进行,生产的数量应和订单的数量相同,以避免生产出无用的机器。 符号规定:X1―――第一季度生产发动机的数量 X2―――第二季度生产发动机的数量
X3―――第三季度生产发动机的数量 建模: 1.三个季度发动机的总的生产量为180台。 2.每个季度的生产量和库存机器的数量之和要大于等于本季度的交货数量。 3.每个月的生产数量要符合工厂的生产能力。 4.将实际问题转化为非线性规划问题,建立非线性规划模型 目标函数 min f(x)=50(x1+x2+x3)+0.2(x12+x22+x32)+4(x1-40)+4(x1+x2-100) 整理,得 min f(x)=50(x1+x2+x3)+0.2(x12+x22+x32)+4(2x1+x2-140) 约束函数s.t x1+x2≥100; x1+x2+x3=180; 40≤x1≤100; 0≤x2≤100; 0≤x3≤100; 求解的Matlab程序代码: M-文件 fun.m: function f=fun (x); f=50*(x(1)+x(2)+x(3))+0.2*(x(1)^2+x(2)^2+x(3)^2)+4*(2*x(1) +x(2)-140)主程序fxxgh.m:
2015研究生数学建模MATLAB程序(完整版)
′ú??ò?£o % ?a?ü1y3ì?°??ò??ü??í3?? clear clc fid1=fopen('mingwen1.txt','r'); str1=fgets(fid1); fclose(fid1); fid2=fopen('jiemihou1.txt','r'); str2=fgets(fid2); fclose(fid2); % é?è¥μ¥′ê????μ?????oí±êμ?·?o? ad=find(str2==',');str2(ad)='';ad=find(str2=='.');str2(ad)='';ad=find(str2==';') ;str2(ad)=''; ad=find(str2=='''');str2(ad)='';ad=find(str2=='?');str2(ad)='';ad=find(str2=='£o');str2(ad)=''; ad=find(str2=='"');str2(ad)='';ad=find(str2=='-');str2(ad)='';ad=find(str2= ='/');str2(ad)=''; ad=find(str2==' ');str2(ad)=''; for i=0:25; ad=find(str1=='A'+i);str1(ad)='a'+i; end for i=0:25; ad=find(str2=='A'+i);str2(ad)='a'+i; end n1(1,26)=0; n2(1,26)=0; n1(1)=sum(str1=='a');n2(1)=sum(str2=='a'); n1(2)=sum(str1=='b');n2(2)=sum(str2=='b'); n1(3)=sum(str1=='c');n2(3)=sum(str2=='c'); n1(4)=sum(str1=='d');n2(4)=sum(str2=='d'); n1(5)=sum(str1=='e');n2(5)=sum(str2=='e'); n1(6)=sum(str1=='f');n2(6)=sum(str2=='f'); n1(7)=sum(str1=='g');n2(7)=sum(str2=='g'); n1(8)=sum(str1=='h');n2(8)=sum(str2=='h'); n1(9)=sum(str1=='i');n2(9)=sum(str2=='i'); n1(10)=sum(str1=='j');n2(10)=sum(str2=='j'); n1(11)=sum(str1=='k');n2(11)=sum(str2=='k'); n1(12)=sum(str1=='l');n2(12)=sum(str2=='l'); n1(13)=sum(str1=='m');n2(13)=sum(str2=='m'); n1(14)=sum(str1=='n');n2(14)=sum(str2=='n'); n1(15)=sum(str1=='o');n2(15)=sum(str2=='o');
Matlab仿真实例-卫星轨迹
卫星轨迹 一.问题提出 设卫星在空中运行的运动方程为: 其中是k 重力系数(k=401408km3/s)。卫星轨道采用极坐标表示,通过仿真,研究发射速度对卫星轨道的影响。实验将作出卫星在地球表面(r=6400KM ,θ=0)分别以v=8KM/s,v=10KM/s,v=12KM/s 发射时,卫星绕地球运行的轨迹。 二.问题分析 1.卫星运动方程一个二阶微分方程组,应用Matlab 的常微分方程求解命令ode45求解时,首先需要将二阶微分方程组转换成一阶微分方程组。若设,则有: 2.建立极坐标如上图所示,初值分别为:卫星径向初始位置,即地球半径:y(1,1)=6400;卫星初始角度位置:y(2,1)=0;卫星初始径向线速度:y(3,1)=0;卫星初始周向角速度:y(4,1)=v/6400。 3.将上述一阶微分方程及其初值带入常微分方程求解命令ode45求解,可得到一定时间间隔的卫星的径向坐标值y(1)向量;周向角度坐标值y(2)向量;径向线速度y(3)向量;周向角速度y(4)向量。 4.通过以上步骤所求得的是极坐标下的解,若需要在直角坐标系下绘制卫星的运动轨迹,还需要进行坐标变换,将径向坐标值y(1)向量;周向角度坐标值y(2)向量通过以下方程转换为直角坐标下的横纵坐标值X,Y 。 5.卫星发射速度速度的不同将导致卫星的运动轨迹不同,实验将绘制卫星分别以v=8KM/s ,v=10KM/s ,v=12KM/s 的初速度发射的运动轨迹。 三.Matlab 程序及注释 1.主程序 v=input('请输入卫星发射速度单位Km/s :\nv=');%卫星发射速度输入。 axis([-264007000-1000042400]);%定制图形输出坐标范围。 %为了直观表达卫星轨迹,以下语句将绘制三维地球。 [x1,y1,z1]=sphere(15);%绘制单位球。 x1=x1*6400;y1=y1*6400;???????-=+-=dt d dt dr r dt d dt d r r k dt r d θ θθ2)(2 22222θ==)2(,)1(y r y ?????????????**-=**+*-===)1(/)4()3(2)4()4()4()1()1()1()3()4()2() 3()1(y y y dt dy y y y y y k dt dy y dt dy y dt dy ???*=*=)] 2(sin[)1(Y )]2(cos[)1(X y y y y
MATLAB Simulink系统建模与仿真 实验报告
MATLAB/Simulink 电力系统建模与仿真 实验报告 姓名:****** 专业:电气工程及其自动化 班级:******************* 学号:*******************
实验一无穷大功率电源供电系统三相短路仿真 1.1 无穷大功率电源供电系统仿真模型构建 运行MATLAB软件,点击Simulink模型构建,根据电路原理图,添加下列模块: (1)无穷大功率电源模块(Three-phase source) (2)三相并联RLC负荷模块(Three-Phase Parallel RLC Load) (3)三相串联RLC支路模块(Three-Phase Series RLC Branch) (4)三相双绕组变压器模块(Three-Phase Transformer (Two Windings)) (5)三相电压电流测量模块(Three-Phase V-I Measurement) (6)三相故障设置模块(Three-Phase Fault) (7)示波器模块(Scope) (8)电力系统图形用户界面(Powergui) 按电路原理图连接线路得到仿真图如下: 1.2 无穷大功率电源供电系统仿真参数设置 1.2.1 电源模块 设置三相电压110kV,相角0°,频率50Hz,接线方式为中性点接地的Y形接法,电源电阻0.00529Ω,电源电感0.000140H,参数设置如下图:
1.2.2 变压器模块 变压器模块参数采用标幺值设置,功率20MVA,频率50Hz,一次测采用Y型连接,一次测电压110kV,二次侧采用Y型连接,二次侧电压11kV,经过标幺值折算后的绕组电阻为0.0033,绕组漏感为0.052,励磁电阻为909.09,励磁电感为106.3,参数设置如下图: 1.2.3 输电线路模块 根据给定参数计算输电线路参数为:电阻8.5Ω,电感0.064L,参数设置如下图: 1.2.4 三相电压电流测量模块 此模块将在变压器低压侧测量得到的电压、电流信号转变成Simulink信号,相当于电压、电流互感器的作用,勾选“使用标签(Use a label)”以便于示波器观察波形,设置电压标签“Vabc”,电流标签“Iabc”,参数设置如下图:
MATLAB及在数学建模中的应用
第1讲MATLAB及 在数学建模中的应用 ? MatLab简介及基本运算?常用计算方法 ?应用实例
一、 MatLab简介及基本运算 1.1 MatLab简介 1.2 MatLab界面 1.3 MatLab基本数学运算 1.4 MatLab绘图
1.1 MatLab简介?MATLAB名字由MATrix和 LABoratory 两词组成。20世纪七十年代后期, 美国新墨西哥大学计算机科学系主任Cleve Moler教授为减轻学生编程负担,为学生设计了一组调用LINPACK和EISPACK库程序的“通俗易用”的接口,此即用FORTRAN编写的萌芽状态的MATLAB。
?经几年的校际流传,在Little的推动下,由Little、Moler、Steve Bangert合作,于1984年成立了MathWorks公司,并把MATLAB正式推向市场。从这时起,MATLAB的内核采用C语言编写,而且除原有的数值计算能力外,还新增了数据图视功能。
?1997年春,MATLAB5.0版问世,紧接着是5.1、5.2、5.3、6.0、6.1、6.5、7.0版。现今的MATLAB拥有更丰富的数据类型和结构、更友善的面向对象、更加快速精良的图形可视、更广博的数学和数据分析资源、更多的应用开发工具。 ?20世纪九十年代的时候,MATLAB已经成为国际控制界公认的标准计算软件。
?MATLAB具有用法简易、可灵活运用、程式结构强又兼具延展性。以下为其几个特色: ①可靠的数值运算和符号计算。在MATLAB环境中,有超过500种数学、统计、科学及工程方面的函 数可使用。 ②强大的绘图功能。 MATLAB可以绘制各种图形,包括二维和三维图形。 ③简单易学的语言体系。 ④为数众多的应用工具箱。
倒立摆系统的建模及Matlab仿真资料
第1 页共11 页 倒立摆系统的建模及Matlab仿真 1.系统的物理模型 考虑如图(1)所示的倒立摆系统。图中,倒立摆安装在一个小车上。这里仅考虑倒立摆在图面内运动的二维问题。 图(1)倒立摆系统 假定倒立摆系统的参数如下。 摆杆的质量:m=0.1g l=1m小车的质量:摆杆的长度:2重力加速度:g=9.8m/M=1kg s摆杆的质量在摆杆的中心。 设计一个控制系统,使得当给定任意初始条件(由干扰引起)时,最大超调量?≤10%,调节时间ts ≤4s ,通过小车的水平运动使倒立摆保持在垂直位置。 2.系统的数学模型 2.1建立倒置摆的运动方程并将其线性化。 为简化问题,在数学模型中首先假设:1)摆杆为刚体;2)忽略摆杆与支点之间的摩擦;3)忽略小车与接触面间的摩擦。 ?),在u设小车瞬时位置为z,摆心瞬时位置为(作用下,小车及摆均产生加速远 动,sin?lz根据牛顿第二定律,在水平直线远动方向的惯性力应与u平衡,于是有 22dzd?)?sinu?M?m(zl22dtdt???2????z(M?mml?)cos?mlusin? 即:??①
绕摆轴转动的惯性力矩与重力矩平衡,因而有. 第2 页共11 页 2??d??? sin??lcosm(z?lsinmgl)??2dt?????22???????即: nis?l?ocgcosincoszs?ls??② 以上两个方程都是非线性方程,为求得解析解,需作线性化处理。由于控制的目的是保持倒立摆直?2?????且可忽略则,立,在试驾合适的外力条件下,假定θ很小,接近于零时合理的,1sincos??,项。于是有 ???M?zm?u?ml??)(③ ????g?z?l??④联立求解可得1mg?u?z????MM 1)?m(M????u??MlMl 列写系统的状态空间表达式。2.2??T xx,x,x,,选取系统变量则 xx,x,xx?,42134123xx??211mgux???x?32MM x?x?431)(M?mu?x?x? 34MlMl 即00100????z??1mg??????000?z?????d MM??Bu?Ax?xux????????00001???dt????1gm?(M)????000??????? MlMl??????Cx?0?y?xx1001代入数据计算得到:0100????000?1??????T0D,?0??1BA?,?001,C100??1000??00011?? 11 页3 页共第 3.设计控制器3.1判断系统的能控性和稳定性 1100????0011????23BBAABAB?Q?故被控对象完全可控, rank()=4,Q kk??11?0?10??011?10???22???11?。出现大于零的特征值,故被,,0 解得特征值为 0由特征方程0??11I?A?)(控对象不稳定3.2确定希望的极点, 另一对为远极点,认为系统性能主要由主导,选其中一对为主导极点和希望的极点n=4ss21极点决定,远极点只有微小影响。根据二阶系统的关系式,先确定主导极点???42??1????10.?e??t1.67?有,闭环可得;取误差带,于是取,则6.?059?0.02.?0? pns??n2????1?js??=-10.8j,远极点选择使它和原点的距离大于主导极点与原点 距离主导极点为?n,21s??15倍,取的54,33.3采用状态反馈方法使系统稳定并配置极点 ??kkkk?k;状态反馈系统的状态方程,馈状态反的控制规律为为kxu??3102?,其
MATLAB实现通信系统仿真实例
补充内容:模拟调制系统的MATLAB 仿真 1.抽样定理 为了用实验的手段对连续信号分析,需要先对信号进行抽样(时间上的离散化),把连续数据转变为离散数据分析。抽样(时间离散化)是模拟信号数字化的第一步。 Nyquist 抽样定律:要无失真地恢复出抽样前的信号,要求抽样频率要大于等于两倍基带信号带宽。 抽样定理建立了模拟信号和离散信号之间的关系,在Matlab 中对模拟信号的实验仿真都是通过先抽样,转变成离散信号,然后用该离散信号近似替代原来的模拟信号进行分析的。 【例1】用图形表示DSB 调制波形)4cos()2cos(t t y ππ= 及其包络线。 clf %%计算抽样时间间隔 fh=1;%%调制信号带宽(Hz) fs=100*fh;%%一般选取的抽样频率要远大于基带信号频率,即抽样时间间隔要尽可能短。 ts=1/fs; %%根据抽样时间间隔进行抽样,并计算出信号和包络 t=(0:ts:pi/2)';%抽样时间间隔要足够小,要满足抽样定理。 envelop=cos(2*pi*t);%%DSB 信号包络 y=cos(2*pi*t).*cos(4*pi*t);%已调信号 %画出已调信号包络线 plot(t,envelop,'r:','LineWidth',3); hold on plot(t,-envelop,'r:','LineWidth',3); %画出已调信号波形 plot(t,y,'b','LineWidth',3); axis([0,pi/2,-1,1])% hold off% xlabel('t'); %写出图例 【例2】用图形表示DSB 调制波形)6cos()2cos(t t y ππ= 及其包络线。 clf %%计算抽样时间间隔 fh=1;%%调制信号带宽(Hz) fs=100*fh;%抽样时间间隔要足够小,要满足抽样定理。 ts=1/fs; %%根据抽样时间间隔进行抽样
Matlab控制系统计算机辅助设计
实验目录 实验一:Matlab环境熟悉与基本运算(设计型)实验二:Matlab语言程序设计(设计型) 实验三:控制系统模型的建立(设计型) 实验四:Simulink仿真入门(验证型) 实验五:控制系统时域仿真分析(设计型) 实验六:Simulink环境下时域仿真 实验七:控制系统根轨迹仿真分析 实验八:控制系统频域仿真分析(设计型)
1、矩阵运算(1)矩阵的乘法 A=[1 2;3 4]; B=[5 5;7 8]; y=A^2*B y = 105 115 229 251 (2)矩阵除法 A=[1 2 3;4 5 6;7 8 9]; B=[1 0 0;0 2 0;0 0 3]; y1=A\B 警告: 矩阵接近奇异值,或者缩放错误。结果可能不准确。RCOND = 1.541976e-18。y1 = 1.0e+16 * -0.4504 1.8014 -1.3511 0.9007 -3.6029 2.7022 -0.4504 1.8014 -1.3511 y2=A/B y2 = 1.0000 1.0000 1.0000 4.0000 2.5000 2.0000 7.0000 4.0000 3.0000 (3)矩阵的转置及共轭转置 A=[5+i,2-i,1;6*i,4,9-i]; y1=A.' y1 = 5.0000 + 1.0000i 0.0000 + 6.0000i 2.0000 - 1.0000i 4.0000 + 0.0000i 1.0000 + 0.0000i 9.0000 - 1.0000i y2=A' y2 = 5.0000 - 1.0000i 0.0000 - 6.0000i 2.0000 + 1.0000i 4.0000 + 0.0000i 1.0000 + 0.0000i 9.0000 + 1.0000i 实验名称:Matlab环境熟悉与基本运算(设计型)
数学建模matlab例题参考及练习
数学实验与数学建模 实验报告 学院: 专业班级: 姓名: 学号: 完成时间:年月日
承 诺 书 本人承诺所呈交的数学实验与数学建模作业都是本人通过学习自行进行编程独立完成,所有结果都通过上机验证,无转载或抄袭他人,也未经他人转载或抄袭。若承诺不实,本人愿意承担一切责任。 承诺人: 年 月 日 数学实验学习体会 (每个人必须要写字数1200字以上,占总成绩的20%) 练习1 一元函数的图形 1. 画出x y arcsin =的图象. 2. 画出x y sec =在],0[π之间的图象. 3. 在同一坐标系中画出x y =,2x y =,3 x y = ,3x y =,x y =的图象. 4. 画出3 2 3 2)1()1()(x x x f + +-=的图象,并根据图象特点指出函数)(x f 的奇偶性. 5. 画出)2ln(1++=x y 及其反函数的图象. 6. 画出3 21+=x y 及其反函数的图象.
练习2 函数极限 1.计算下列函数的极限. (1) x x x 4 cos 1 2 sin 1 lim 4 - + π → . 程序: sym x; f=(1+sin(2*x))/(1-cos(4*x)); limit(f,x,pi/4) 运行结果: lx21 ans = 1 (2). 程序: sym x; f=(1+cos(x))^(3*sec(x)); limit(f,x,pi/2) 运行结果: lx22 ans = exp(3) (3) 2 2 ) 2 ( sin ln lim x x x - π π → . 程序: sym x; f=log(sin(x))/(pi-2*x)^2; limit(f,x,pi/2) 运行结果: lx23 ans = -1/8 (4) 2 1 2 lim x x e x →. 程序: x x x sec 3 2 ) cos 1( lim+ π →
数学建模章绍辉版第四章作业
第四章作业 第二题: 针对严重的交通情况,国家质量监督检验检疫局发布的国家标准,车辆驾驶人员血液中的酒精含量大于或等于20mg/100ml,小于80mg/100ml 为饮酒驾车,血液中的酒精含量大于或等于80mg/100ml 的为醉酒驾车。 下面分别考虑大李在很短时间内和较长时间内(如2个小时)喝了三瓶啤酒,多长时间内驾车就会违反新的国家标准。 1、 问题假设 大李在短时间内喝下三瓶啤酒后,酒精先从吸收室(肠胃)吸收进中心室(血液和体液),然后从中心室向体外排除,忽略喝酒的时间,根据生理学知识,假设 (1) 吸收室在初始时刻t=0时,酒精量立即为 32 D ;在任意时刻,酒精从吸收室吸收进中心室的速率(吸收室在单位时间内酒精含量的减少量)与吸收室的酒精含量成正比,比例系数为1k ; (2) 中心室的容积V 保持不变;在初始时刻t=0时,中心室的酒精含量为0;在任意时 刻,酒精从中心室向体外排除的速率(中心室在单位时间内酒精含量的减少量)与 中心室的酒精含量成正比,比例系数为2k ; (3) 在大李适度饮酒没有酒精中毒的前提下,假设1k 和2k 都是常量,与饮酒量无关。 2、 符号说明 酒精量是指纯酒精的质量,单位是毫克; 酒精含量是指纯酒精的浓度,单位是毫克/百毫升; ~t 时刻(小时) ; ()~x t 在时刻t 吸收室(肠胃)内的酒精量(毫克) ; 0~D 两瓶酒的酒精量(毫克); (t)~c 在时刻t 吸收室(血液和体液)的酒精含量(毫克/百毫升) ; 2()~c t 在时刻t 中心室(血液和体液)的酒精含量(毫克/百毫升); ~V 中心室的容积(百毫升) ; 1~k 酒精从吸收室吸收进中心室的速率系数(假设其为常数2.0079); 2~k 酒精从中心室向体外排除的速率系数(假设其为常数0.1855); 3~k 在短时间喝下三瓶酒的假设下是指短时间喝下的三瓶酒的酒精总量除以中心室体积, 即03/2D V ;而在较长时间内(2小时内)喝下三瓶酒的假设下就特指03/4D V .
用MATLAB处理线性系统数学模型
实验一 用MATLAB 处理线性系统数学模型 [说明] 一个控制系统主要由被控对象、测量装置、控制器和执行器四大部分构成。MATLAB 软件的应用对提高控制系统的分析、设计和应用水平起着十分重要的作用。采用MATLAB 软件仿真的关键问题之一是在MATLAB 软件平台上怎样正确表示被控对象的数学模型。 [实验目的] 1.了解MATLAB 软件的基本特点和功能; 2.掌握线性系统被控对象传递函数数学模型在MATLAB 环境下的表示方法及转换; 3.掌握多环节串联、并联、反馈连接时整体传递函数的求取方法; 4. 掌握在SIMULINK 环境下系统结构图的形成方法及整体传递函数的求取方法; 5.了解在MATLAB 环境下求取系统的输出时域表达式的方法。 [实验指导] 一、被控对象模型的建立 在线性系统理论中,一般常用的描述系统的数学模型形式有: (1)传递函数模型——有理多项式分式表达式 (2)传递函数模型——零极点增益表达式 (3)状态空间模型(系统的内部模型) 这些模型之间都有着内在的联系,可以相互进行转换。 1、传递函数模型——有理多项式分式表达式 设系统的传递函数模型为 111011 1......)()()(a s a s a s a b s b s b s b s R s C s G n n n n m m m m ++++++++= =---- 对线性定常系统,式中s 的系数均为常数,且a n 不等于零。 这时系统在MATLAB 中可以方便地由分子和分母各项系数构成的两个向量唯一地确定,这两个向量常用num 和den 表示。 num=[b m ,b m-1,…,b 1,b 0] den=[a n ,a n-1,…,a 1,a 0]
matlab控制系统传递函数模型
MATLAB及 控制系统仿真 实验 班级:智能0702
姓名:刘保卫 学号: 06074053(18) 实验四控制系统数学模型转换及MATLAB实现 一、实验目的 熟悉MATLAB 的实验环境。 掌握MATLAB 建立系统数学模型的方法。 二、实验内容 (注:实验报告只提交第2 题) 1、复习并验证相关示例。 (1)系统数学模型的建立 包括多项式模型(Transfer Function,TF),零极点增益模型(Zero-Pole,ZP),状态空间模型 (State-space,SS); (2)模型间的相互转换 系统多项式模型到零极点模型(tf2zp),零极点增益模型到多项式模型(zp2tf),状态空间模 型与多项式模型和零极点模型之间的转换(tf2ss,ss2tf,zp2ss…); (3)模型的连接 模型串联(series),模型并联(parallel),反馈连接(feedback) 2、用MATLAB 做如下练习。 (1)用2 种方法建立系统的多项式模型。 程序如下: %建立系统的多项式模型(传递函数) %方法一,直接写表达式 s=tf('s') Gs1=(s+2)/(s^2+5*s+10) %方法二,由分子分母构造 num=[1 2]; den=[1 5 10]; Gs2=tf(num,den) figure pzmap(Gs1) figure pzmap(Gs1) grid on 运行结果:
易知两种方法结果一样 Transfer function: s Transfer function: s + 2 -------------- s^2 + 5 s + 10 Transfer function: s + 2 -------------- s^2 + 5 s + 10 (2)用2 种方法建立系统的零极点模型和多项式模型。 程序如下: %方法一 s=tf('s') Gs1=10*(s+1)/((s+1)*(s+5)*(s+10)) % zpk模型 ZPK=zpk(Gs1) %方法二 % tf模型 num=[10 10]; den=conv([1 1],conv([1 5],[1 10])); Gs2=tf(num,den) % zpk模型 ZPK=zpk(Gs2) figure pzmap(Gs1) figure pzmap(Gs1) grid on 运行结果: 易知两种方法结果一样 Transfer function: s Transfer function:
matlab在数学建模中的应用
Matlab在数学建模中的应用 数学建模是通过对实际问题的抽象和简化,引入一些数学符号、变量和参数,用数学语言和方法建立变量参数间的内在关系,得出一个可以近似刻画实际问题的数学模型,进而对其进行求解、模拟、分析检验的过程。它大致分为模型准备、模型假设、模型构成、模型求解、模型分析、模型检验及应用等步骤。这一过程往往需要对大量的数据进行分析、处理、加工,建立和求解复杂的数学模型,这些都是手工计算难以完成的,往往在计算机上实现。在目前用于数学建模的软件中,matlab 强大的数值计算、绘图以及多样化的工具箱功能,能够快捷、高效地解决数学建模所涉及的众多领域的问题,倍受数学建模者的青睐。 1 Matlab在数学建模中的应用 下面将联系数学建模的几个环节,结合部分实例,介绍matlab 在数学建模中的应用。 1.1 模型准备阶段 模型准备阶段往往需要对问题中的给出的大量数据或图表等进行分析,此时matlab的数据处理功能以及绘图功能都能得到很好的应用。 1.1.1 确定变量间关系 例1 已知某地连续20年的实际投资额、国民生产总值、物价指数的统计数据(见表),由这些数据建立一个投资额模型,根据对未来国民生产总值及物价指数的估计,预测未来的投资额。
表1 实际投资额、国民生产总值、物价指数的统计表 记该地区第t年的投资为z(t),国民生产总值为x(t),物价指数为y(t)。 赋值: z=[90.9 97.4 113.5 125.7 122.8 133.3 149.3 144.2 166.4 195 229.8 228.7 206.1 257.9 324.1 386.6 423 401.9 474.9 424.5]' x=[596.7 637.7 691.1 756 799 873.4 944 992.7 1077.6 1185.9 1326.4 1434.2 1549.2 1718 1918.3 2163.9 2417.8 2631.6 2954.7 3073]' y=[0.7167 0.7277 0.7436 0.7676 0.7906 0.8254 0.8679 0.9145 0.9601 1 1.0575 1.1508 1.2579 1.3234 1.4005 1.5042 1.6342 1.7842 1.9514 2.0688]' 先观察x与z之间,y与z之间的散点图 plot(x,z,'*') plot(y,z,'*') 由散点图可以看出,投资额和国民生产总值与物价指数都近似呈
matlab数学建模实例
第四周 3. 中的三个根。 ,在求8] [0,041.76938.7911.1-)(2 3=-+=x x x x f function y=mj() for x0=0:0.01:8 x1=x0^3-11.1*x0^2+38.79*x0-41.769; if (abs(x1)<1.0e-8) x0 end end 4.分别用简单迭代法、埃特金法、牛顿法求解方程,并比较收敛性与收敛速度(ε分别取10-3、10-5、10-8)。 简单迭代法: function y=jddd(x0) x1=(20+10*x0-2*x0^2-x0^3)/20; k=1; while (abs(x1-x0)>=1.0e-3) x0=x1; x1=(20+10*x0-2*x0^2-x0^3)/20;k=k+1; end x1 k 埃特金法: function y=etj(x0) x1=(20-2*x0^2-x0^3)/10; x2=(20-2*x1^2-x1^3)/10; x3=x2-(x2-x1)^2/(x2-2*x1+x0); k=1; while (abs(x3-x0)>=1.0e-3) x0=x3; x1=(20-2*x0^2-x0^3)/10; x2=(20-2*x1^2-x1^3)/10; x3=x2-(x2-x1)^2/(x2-2*x1+x0);k=k+1; end 2 ,020102)(023==-++=x x x x x f
x3 k 牛顿法: function y=newton(x0) x1=x0-fc(x0)/df(x0); k=1; while (abs(x1-x0)>=1.0e-3) x0=x1; x1=x0-fc(x0)/df(x0);k=k+1; end x1 k function y=fc(x) y=x^3+2*x^2+10*x-20; function y=df(x) y=3*x^2+4*x+10; 第六周 1.解例6-4(p77)的方程组,分别采用消去法(矩阵分解)、Jacobi迭代法、Seidel迭代法、松弛法求解,并比较收敛速度。 消去法: x=a\d 或 [L,U]=lu(a); x=inv(U)inv(L)d Jacobi迭代法: function s=jacobi(a,d,x0) D=diag(diag(a)); U=-triu(a,1); L=-tril(a,-1); C=inv(D); B=C*(L+U); G=C*d; s=B*x0+G; n=1; while norm(s-x0)>=1.0e-8 x0=s; s=B*x0+G;
基于MATLAB的光伏电池通用数学模型
本文由qpadm贡献 pdf文档可能在WAP端浏览体验不佳。建议您优先选择TXT,或下载源文件到本机查看。 第 25 卷第 4 期 2009 年 4 月 电 力 For personal use only in study and research; not for commercial use 科 学 与 For personal use only in study and research; not for commercial use 工 程 Vol.25, No.4 Apr., 2009 11 For personal use only in study and research; not for commercial use Electric Power Science and Engineering 基于 MATLAB 的光伏电池通用数学模型 王长江 For personal use only in study and research; not for commercial use (华北电力大学电气与电子工程学院,北京 102206)摘要:针对光伏电池输出特性具有强烈的非线性,根据太阳能电池的直流物理模型,利用 MATLAB 建立了太阳能光伏阵列通用的仿真模型。利用此模型,模拟任意环境、太阳辐射强度、电池板参数、电池板串并联方式下的光伏阵列 I-V 特性。模型内部参数经过优化,较好地反应了电池实际特性。模型带有最大功率点跟踪功能,能很好地实现光伏发电系统最佳工作点的跟踪。关键词:光伏电池;MPPT;I-V 特性中图分类号:TM615 文献标识码:A 引 言 1 光伏电池特性 随着化石能源的消耗,全球都在面临能源危机,太阳能依靠其清洁、分布广泛等特点成为当今发展速度居第二位的能源 [1] 。光伏阵列由多个单体太阳能电池进行串并联封装而成,是光伏发电的能源供给中心,其 I V 特性曲线随日照强度和太阳能电池温度变化,即 I=f ( V, S, T ) 。目前而厂家通常仅为用户提供标准测试的短路电流 I sc 、开路电压 Voc、最大功率点电流 I m 、最大功率点电压 V m 值,所以如何根据已有的标准测试数据来仿真光伏阵列在不同日照、温度下的 I V,P V 特性曲线,在光伏发电系统分析研究中显得至关重要 [2] 。文献 [ 3~4 ] 介绍了一些光伏发电相关的仿真模型,但这些模型都需要已知一些特定参数,使得分析研究有一些困难。文献 [ 5 ] 介绍了经优化的光伏电池模型,但不能任意改变原始参数。文献 [ 6 ] 给出了光伏电池的原理模型,但参数选用典型值,会造成较大的误差。本文考虑工程应用因素,基于太阳能电池的物理模型,建立了适用于任何条件下的工程用光伏电池仿真模型。
Matlab 控制系统 传递函数模型
MATLAB及控制系统 仿真实验 班级:智能0702 姓名:刘保卫 学号:06074053(18)
实验四控制系统数学模型转换及MATLAB实现 一、实验目的 熟悉MATLAB 的实验环境。 掌握MATLAB 建立系统数学模型的方法。 二、实验内容 (注:实验报告只提交第2 题) 1、复习并验证相关示例。 (1)系统数学模型的建立 包括多项式模型(Transfer Function,TF),零极点增益模型(Zero-Pole,ZP),状态空间模型 (State-space,SS); (2)模型间的相互转换 系统多项式模型到零极点模型(tf2zp),零极点增益模型到多项式模型(zp2tf),状态空间模 型与多项式模型和零极点模型之间的转换(tf2ss,ss2tf,zp2ss…); (3)模型的连接 模型串联(series),模型并联(parallel),反馈连接(feedback) 2、用MATLAB 做如下练习。 (1)用2 种方法建立系统的多项式模型。 程序如下: %建立系统的多项式模型(传递函数) %方法一,直接写表达式 s=tf('s') Gs1=(s+2)/(s^2+5*s+10) %方法二,由分子分母构造 num=[1 2]; den=[1 5 10]; Gs2=tf(num,den) figure pzmap(Gs1) figure pzmap(Gs1) grid on 运行结果: 易知两种方法结果一样 Transfer function: s
Transfer function: s + 2 -------------- s^2 + 5 s + 10 Transfer function: s + 2 -------------- s^2 + 5 s + 10 (2)用2 种方法建立系统的零极点模型和多项式模型。程序如下: %方法一 s=tf('s') Gs1=10*(s+1)/((s+1)*(s+5)*(s+10)) % zpk模型 ZPK=zpk(Gs1) %方法二 % tf模型 num=[10 10]; den=conv([1 1],conv([1 5],[1 10])); Gs2=tf(num,den) % zpk模型 ZPK=zpk(Gs2) figure pzmap(Gs1) figure pzmap(Gs1) grid on 运行结果: 易知两种方法结果一样 Transfer function: s Transfer function: 10 s + 10 ------------------------ s^3 + 16 s^2 + 65 s + 50