关于支持向量机参数选择方法分析
水轮机的选型设计说明
水轮机的选型设计 水轮机选型时水电站设计的一项重要任务。水轮机的型式与参数的选择是否合理,对于水电站的功能经济指标及运行稳定性,可靠性都有重要影响。 水轮机选型过程中,一般是根据水电站的开发方式,功能参数,水工建筑物的布置等,并考虑国内外已生产的水轮机的参数及制造厂的生产水平,拟选若干个方案进行技术经济的综合比较,最终确定水轮机的最佳型式与参数。 一:水轮机选型的内容,要求和所需资料 1:水轮机选择的内容 (1)确定单机容量及机组台数。 (2)确定机型和装置型式。 (3)确定水轮机的功率,转轮直径,同步转速,吸出高度及安装高程,轴向水推力,飞逸转速等参数。对于冲击式水轮机,还包括确定射流直径与喷嘴数等。(4)绘制水轮机的运转综合特性曲线。 (5)估算水轮机的外形尺寸,重量及价格。 wertyp9 ed\结合水轮机在结构、材质、运行等方面的要求,向制造厂提出制造任务书。 2.水轮机选择的基本要求 水轮机选择必须要考虑水电站的特点,包括水能、水文地质、工程地质以及电力系统构成、枢纽布置等方面对水轮机的要求。在几个可能的方案中详细地进行以下几方面比较,从中选择出技术经济综合指标最优的方案。 (1)保证在设计水头下水轮机能发生额定出力,在低于设计水头时机组的受阻容量尽可能小。 (2)根据水电站水头的变化,及电站的运行方式,选择适合的水轮机型式及参数,使电站运行中平均效率尽可能高。 (3)水轮机性能及结构要能够适应电站水质的要求,运行稳定、灵活、可靠,有良好的抗空化性能。在多泥沙河流上的电站,水轮机的参数及过流部件的材质要保证水轮机具有良好的抗磨损,抗空蚀性能。 (4)机组的结构先进、合理,易损部件应能互换并易于更换,便于操作及安装维护。 (5)机组制造供货应落实,提出的技术要求要符合制造厂的设计、试验与制造水平。 (6)机组的最大部件及最重要部件要考虑运输方式及运输可行性。 3.水轮机选型所需要的原始技术材料 水轮机的型式与参数的选择是否合理、是否与水电站建成后的实际情况相吻合,在很大程度上取决于对原始资料的调查、汇集和校核。根据初步设计的深度和广度的要求,通常应具备下述的基本技术资料: (1)枢纽资料:包括河流的水能总体规划,流域的水文地质,水能开发方式,水库的调节性能,水利枢纽布置,电站类型及厂房条件,上下游综合利用的要求,工程的施工方式和规划等情况。还应包括严格分析与核准的水能基本参数,诸如电站的最大水头Hmax、最小水头Hmin,加权平均水头Ha,设计水头Hr,各种特征流量Qmin、Qmax、Qa,典型年(设计水平年,丰水年,枯水年)的水头、流量过程。此外还应有电站的总装机容量,保证出力以及水电站下游水位流量关系曲线。 (2)电力系统资料:包括电力系统负荷组成,设计水平年负荷图,典型日负荷
雕刻机常识
1.对高度的定义 2.应根据不同的材质、雕刻内容、选择不同的刀具、主轴转速、进刀量等加工用量。 3.对雕刻编辑生成文件的要求: [1]雕刻文件为G代码,是本石材雕刻机的指令代码。 [2]为使雕刻自动识别文件,要求在文件的第一行有起始符“%”、在文件的最后有结束符“!”,作为工作开始和结束的命令。 [3]工作数据(加工精度)保留小数点后两位,即0.01mm。 [4]G代码含义:本石材雕刻机执行G代码中的G00、G01两种指令,即快速移动和移动指令。 [5]通讯、采用标准RS232串行通讯方式,波特率为19.2K。8位数据位,1位停止位,与主计算机的握手方式为DSR/DTR。 [6]石材雕刻机坐标原点与编辑软件原点的对照关系。 编辑软件中的0点,是雕刻机加工的原点。制作加工文件时,0点的位置直接影响工件的加工起始位置,应根据工件的形状确定便于定刀的位置作为加工文件的“0”点来完成编辑工作。 ◆石材雕刻刀 1.本设备可使用刀柄为直径为3.175mm到6mm的各种切割、雕刻、钻孔刀具。随机提供 3.175mm、6mm的两种弹簧夹头。 2.随机提供的刀具有:刀柄直径为 3.175mm、和6mm的刀具共10把,主要适合于硬木和塑料的雕刻、切割。雕刻切割金属、大理石、铜板材料的刀具需另外订货。 3.装刀:雕刻刀通过弹簧夹头安装在主轴下端。装刀时先在主轴锥孔中放入大小合适的弹簧夹头,再把刀具放入夹头的中孔,用随机的小扳手卡住主轴颈部的扁槽,使之不能转动,再用大扳手反时针方向旋转紧主轴螺丝母,把刀具上牢。 ◆材料和工件装夹 本设备加工的材料有:有机玻璃、双色板、大理石、硬橡胶、黄铜、紫 铜、硬铝、不锈钢等。加工双色板、有机玻璃等软质薄弱板材可用双面胶 带粘在随机所附的有机玻璃台面上。有机玻璃台面用螺丝固定在铝合金工作台面上。有机玻璃台面的表面可用大直径铣刀自行铣平。加工金属、大理石等硬质材料时,因切割力较大,为防止工件移动,工件应用T形螺丝和压板直接固定在铝合金工作台面上,加工图章之类高而窄的工件时,应在工作台上安装一个夹具,将工件夹紧在夹具中进行加工。 ◆设置
自适应控制参数差分
自适应控制参数差分 进化:比较研究 数值基准问题 亚内兹·布雷斯特,会员,IEEE,格雷纳苏海涵,的Borko博斯科维奇,马里安Mernik,会员,IEEE, IEEE会员,Viljem Zumer 摘要:我们描述了一个高效的自适应控制技术 相关的参数设置与差分进化(DE)。 对DE算法已被用在许多实际情况下,并具有 表现出良好的收敛性。它只有少数控制 参数,这些参数在整个演化中保持固定 的过程。然而,这是不是一件容易的事,正确地设置控制 在DE的参数。我们提出了一个算法的新版本 对DE算法获得自适应控制参数 设置showgood性能数值基准 的问题。结果表明,我们的算法与自适应 控制参数的设置优于或至少与 ,标准算法和进化算法 文献中得到的解决方案时,考虑质量。 关键词:自适应参数控制,差分进化 (DE),进化优化。 引言 差分进化(DE)是一个简单而强大 全局优化的进化算法(EA)介绍 由价格和Storn [1]。DE算法已逐渐 变得越来越流行,并且已经用于许多实际情况中, 主要是因为它已经表现出良好的收敛性能 是主要容易理解的[2]。 EAS [3]是一个广泛的一类随机优化算法 灵感来自生物学,特别是那些生物 允许种群organizms的适应自己的过程 周边环境:遗传和生存 优胜劣汰。中介公司有一个突出的优势超过其他类型的 数值计算方法。他们只需要客观的信息 函数本身,它可以是明确的或隐含的。 其他配件性能,如可微性或连续性 是没有必要的。因此,他们更灵活处理 广泛的问题。 当使用一个有效地址(EA),它也是必要指定候选 解决方案将被改变,以产生新的解决方案[4]。 EA可能有参数,例如,突变的概率, 比赛的大小选择,或人口规模。 手稿收到2005年6月14日,9月19日修订,2005年和 2005年11月9日。这项工作是由斯洛文尼亚的研究部分支持
支持向量机(SVM)原理及
支持向量机(SVM)原理及应用概述
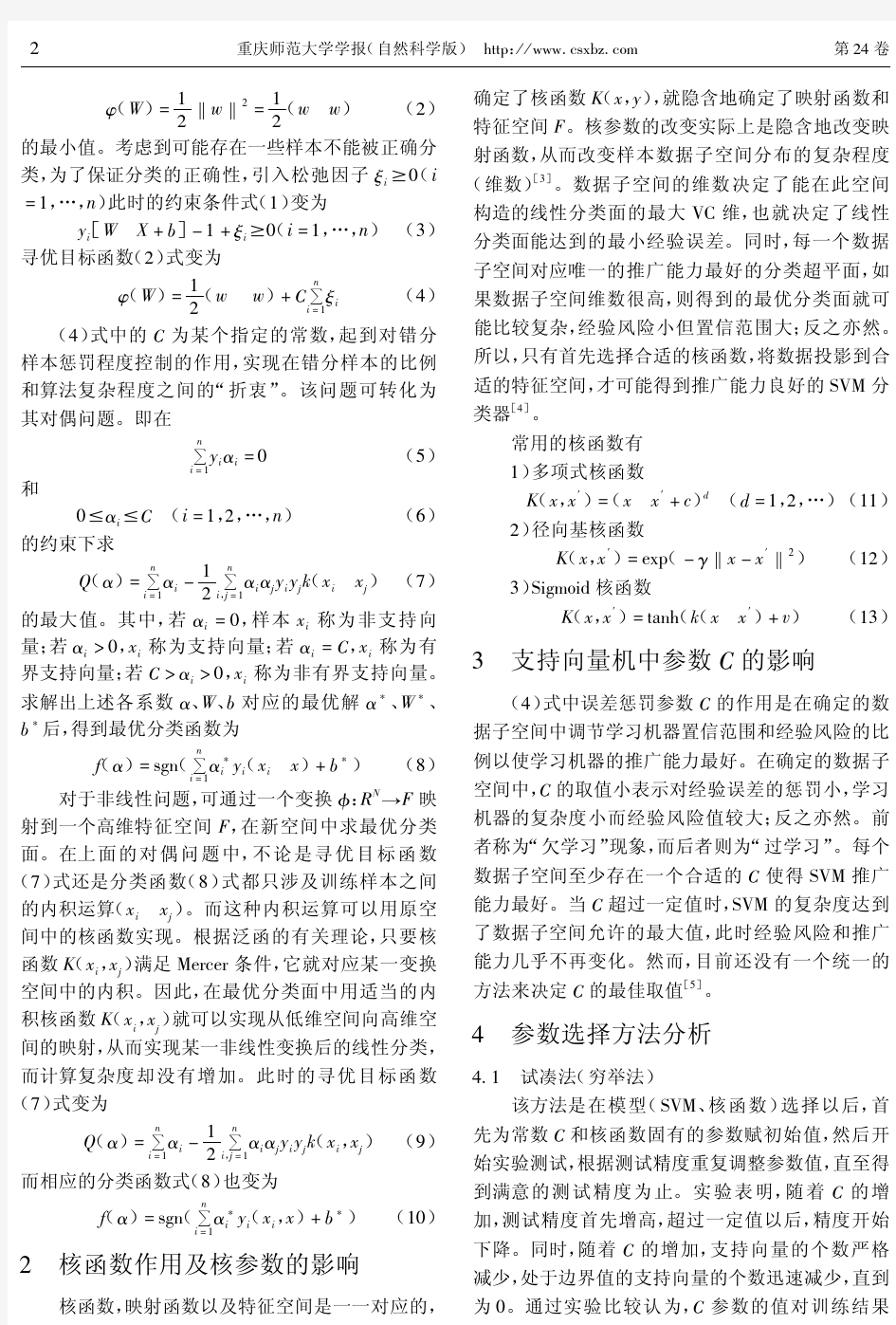
支持向量机(SVM )原理及应用 一、SVM 的产生与发展 自1995年Vapnik (瓦普尼克)在统计学习理论的基础上提出SVM 作为模式识别的新方法之后,SVM 一直倍受关注。同年,Vapnik 和Cortes 提出软间隔(soft margin)SVM ,通过引进松弛变量i ξ度量数据i x 的误分类(分类出现错误时i ξ大于0),同时在目标函数中增加一个分量用来惩罚非零松弛变量(即代价函数),SVM 的寻优过程即是大的分隔间距和小的误差补偿之间的平衡过程;1996年,Vapnik 等人又提出支持向量回归 (Support Vector Regression ,SVR)的方法用于解决拟合问题。SVR 同SVM 的出发点都是寻找最优超平面(注:一维空间为点;二维空间为线;三维空间为面;高维空间为超平面。),但SVR 的目的不是找到两种数据的分割平面,而是找到能准确预测数据分布的平面,两者最终都转换为最优化问题的求解;1998年,Weston 等人根据SVM 原理提出了用于解决多类分类的SVM 方法(Multi-Class Support Vector Machines ,Multi-SVM),通过将多类分类转化成二类分类,将SVM 应用于多分类问题的判断:此外,在SVM 算法的基本框架下,研究者针对不同的方面提出了很多相关的改进算法。例如,Suykens 提出的最小二乘支持向量机 (Least Square Support Vector Machine ,LS —SVM)算法,Joachims 等人提出的SVM-1ight ,张学工提出的中心支持向量机 (Central Support Vector Machine ,CSVM),Scholkoph 和Smola 基于二次规划提出的v-SVM 等。此后,台湾大学林智仁(Lin Chih-Jen)教授等对SVM 的典型应用进行总结,并设计开发出较为完善的SVM 工具包,也就是LIBSVM(A Library for Support Vector Machines)。LIBSVM 是一个通用的SVM 软件包,可以解决分类、回归以及分布估计等问题。 二、支持向量机原理 SVM 方法是20世纪90年代初Vapnik 等人根据统计学习理论提出的一种新的机器学习方 法,它以结构风险最小化原则为理论基础,通过适当地选择函数子集及该子集中的判别函数,使学习机器的实际风险达到最小,保证了通过有限训练样本得到的小误差分类器,对独立测试集的测试误差仍然较小。 支持向量机的基本思想:首先,在线性可分情况下,在原空间寻找两类样本的最优分类超平面。在线性不可分的情况下,加入了松弛变量进行分析,通过使用非线性映射将低维输
支持向量机分类器
支持向量机分类器 1 支持向量机的提出与发展 支持向量机( SVM, support vector machine )是数据挖掘中的一项新技术,是借助于最优化方法来解决机器学习问题的新工具,最初由V.Vapnik 等人在1995年首先提出,近几年来在其理论研究和算法实现等方面都取得了很大的进展,开始成为克服“维数灾难”和过学习等困难的强有力的手段,它的理论基础和实现途径的基本框架都已形成。 根据Vapnik & Chervonenkis的统计学习理论 ,如果数据服从某个(固定但未知的)分布,要使机器的实际输出与理想输出之间的偏差尽可能小,则机器应当遵循结构风险最小化 ( SRM,structural risk minimization)原则,而不是经验风险最小化原则,通俗地说就是应当使错误概率的上界最小化。SVM正是这一理论的具体实现。与传统的人工神经网络相比, 它不仅结构简单,而且泛化( generalization)能力明显提高。 2 问题描述 2.1问题引入 假设有分布在Rd空间中的数据,我们希望能够在该空间上找出一个超平面(Hyper-pan),将这一数据分成两类。属于这一类的数据均在超平面的同侧,而属于另一类的数据均在超平面的另一侧。如下图。 比较上图,我们可以发现左图所找出的超平面(虚线),其两平行且与两类数据相切的超平面(实线)之间的距离较近,而右图则具有较大的间隔。而由于我们希望可以找出将两类数据分得较开的超平面,因此右图所找出的是比较好的超平面。 可以将问题简述如下: 设训练的样本输入为xi,i=1,…,l,对应的期望输出为yi∈{+1,-1},其中+1和-1分别代表两类的类别标识,假定分类面方程为ω﹒x+b=0。为使分类面对所有样本正确分类并且具备分类间隔,就要求它满足以下约束条件: 它追求的不仅仅是得到一个能将两类样本分开的分类面,而是要得到一个最优的分类面。 2.2 问题的数学抽象 将上述问题抽象为: 根据给定的训练集
水轮机型号选择
.水轮机型号选择 水电站水头变化:上游最大—下游最小=校核洪水位—下游正常尾水位 上游最小—下游最大=死水位—校核洪水位 在水轮机系列型谱表3-3和3-4,查出合适的机型有HL240 水轮机HL240型水轮机方案的主要参数选择 (1)转轮直径1D 计算 查水轮机型谱表可得HL240型水轮机在限制工况下的单位流量10'Q =1240L/S=1.243m /s,效率m η=90.4%,由此可初步假定原型水轮机在该工况下的单位流量'1m Q =' 1Q =1.243m /s ,效率η=90.4%,水轮机的额定出力 r N =AQH=8.5×37×(447—404.6)=13334.8kw (其中A 一般取6.5-8.5,Q 为发电流量,H 为上游正常高水位-下游正常尾水位) 由于采用坝后式,H r =0.95H v a =0.95× 244.5812.1+=26.923 (H av =28.34m) ,上述的'1Q 、η和r N =13334.8KW 、r H =26.923m 代入式1D = η r r r H H Q N 1'81.9=2.95m 选用与之接近而偏大的标称直径1D =2.95m (2)转速n 的计算 查水轮机型谱表可得HL240水轮机在最优工况下单位转速' 10n =72.0r/min ,初步假定 '10m n ='10n =72.0r/min,将已知的'10n 和av H =28.34m ,1D =2.95m 代入式n=av H D 1 '1n = 2.9528.3472?=129.93r/min ,选用与之接近而偏大的同步转速n=214.3r/min. (3)效率及单位参数修正 HL240型水轮机在 最优工况下的模型最高效率为max M η=92.0%,模型转轮直径为1M D =0.46m ,可得原型效率: max η=95.0% 则效率修正值为η =95.0%-92.0%=3.0%. 考虑到模型与原型水轮机在制造工艺质量上的差异,常在已求得的η?值中再减去一个修正值ξ。先取ξ=1.0%,则可得效率修正值为η?=2.0%,由此可得原型水轮机在最优工况和限制工况下的效率为: max η=max M η+η?=92.0%+2.0%=94.0%
支持向量机参数设置详解
程序中SVM 的参数: TestSVM_Parameter.svm_type=C_SVC; TestSVM_Parameter.kernel_type= RBF; TestSVM_Parameter.degree=3.0; TestSVM_Parameter.coef0=1; TestSVM_Parameter.gamma=1; TestSVM_Parameter.cache_size=40; TestSVM_Parameter.eps=0.01; TestSVM_Parameter.C=1.0; TestSVM_Parameter.shrinking=1; TestSVM_Parameter.nr_weight=0; TestSVM_Parameter.weight=NULL; TestSVM_Parameter.weight_label=NULL; SVM 参数含义: int svm_type :SVM 问题类型: 0: C_SVC: 多类别识别问题,求解问题 ,,min b w ξ 1 12l t i i C ξ=+∑w w 1: NU_SVC :多类别识别问题,求解问题 ,,,min b ρw ξ 1 112l t i i l νρξ=-+∑w w 2: ONE_CLASS :两类别识别问题,求解问题 ,,,min b ρw ξ 1 112l t i i l ρξν=-+∑w w 3: EPSILON_SVR :回归分析,求解问题 *,,,min b w ξξ *1112l l t i i i i C C ξξ==++∑∑w w 4: NU_SVR :回归分析,求解问题 *,,,,min b εw ξξ ()*112l t i i i C νεξξ=??+++ ???∑w w int kernel_type :核函数类型: 0: LINEAR ,线性,(),t K =x y x y 1: POL Y ,多项式,()(),d t K C γ=+x y x y 2: RBF ,径向基函数,()()2,exp K γ=--x y x y 3: SIGMOID ,Sigmoid 函数,()( ),tanh t K C γ=+x y x y double degree :多项式核函数参数 double gamma :多项式、径向基函数和Sigmoid 函数的参数 double coef0:多项式和Sigmoid 函数的参数
雕刻机操作方法
雕刻机操作方法汇总 了解机器的结构 1机器有三个轴分别是X轴(左右移动)Y轴(前后移动)Z轴(上下移动)。 了解其控制原理 超星雕刻机主要是由电气控制柜----经过传输数据线连接到电脑,在电脑的主机箱子里面装有一个维宏控制卡------电脑里面装有一个维宏控制软件来控制。 操作方法: (一)定点方法 1平面板左下角定点方法 在木板上的左下角或板上雕刻区域的左下角-----通过维宏控制软件用鼠标移动各个轴到左下角的位置-----然后各个轴在维宏控制软件里面的坐标轴清零。 2平面板中心点定点方法 在木板上的中心点或板上雕刻区域的中心点-----通过维宏控制软件用鼠标移动各个轴到中心点的位置-----然后各个轴在维宏控制软件里面的坐标轴清零
三.断点续刻和高级开始功能 断点续刻 点击维宏控制软件里面的---操作——回工件原点----操作-----断点续刻—系统就可以继续从原来停下来的地方开始工作了。 高级开始功能 点击维宏控制软件里面的---操作——回工件原点----操作-----高级开始—点具体位置-输入你要跳到的那一段程序的序号---系统就跳到你指定的位置开始工作了。 四.换刀和断刀时定点的的处理方法 先记下当前段号再把刀抬到安全高度----点击维宏控制软件里面的---操作——回工件原点—换刀----然后把刀移到板上面-----然后在维宏控制软件里面的Z轴清零而X坐标轴和Y坐标轴则不用清零。-----点击维宏控制软件里面的---操作-----高级开始—点具体位置-输入你要跳到的那一段程序的序号(或者是刚才记下的短号)---系统就跳到你指定的位置开始工作了。
水轮机主机选型
摘要 水电站机电部分设计主要根据获得的设计材料中给定的水头范围进行的主机选型,根据选择的三方案中择优进行模型综合特性曲线的绘制,即选出一方案进行绘制,再根据效率,转速等选其一进行蜗壳、尾水管、水轮发电机外形的计算和绘图,最后进行水轮机的调节保证计算和调速器设备选择。 关键字:水轮机主机选型;水电站机电设备初步计算;外形设计;调节保证计算。
前言 毕业设计是高等教育教学中的最后一个教学环节,是实践性教育的环节。 毕业设计与其他教学环节构成有机的整体,也是各个教学环节的继续、深化补充和检验,是将分散、局部的知识内容加以全面的结合,这次设计提高了我们运用知识的综合能力,将知识化为能力,巩固和加深所学知识,培养知识,综合了系统化的运用。 目前,我国大陆水力资源理论蕴藏在1万KW以上的河流共3886条,水力资源理论蕴藏年发电量6082.9Tw·h;技术可开发装机容量541.64GW。经济可开发装机容量401.8GW。我国水力资源具有三个鲜明特点:第一、在地域上分布极不平衡,西部多,东部少。西部水利资源开发出了满足西部电力市场的需要,更重要的是考虑东部电力市场。第二、大多数河流年内、年际经流分布不均。第三、水力资源集中于大江大河,有利于集中开发和规模外送。 本次设计的主要内容为主机选型、蜗壳、尾水管、发电机确定和调节保证计算。设计过程中,依据资料水电站水头,单机引水流量,总装机,对水轮机发电进行初选,并根据单位转速,模型综合特性曲线,对水轮机型号,转速,效率出力等进行认真计算,校验,对选择方案的蜗壳水管,水轮机选型和绘图。对水轮机进行调节保证机算。
通过这次对相关专业知识的课题设计,更加深入的认识知识和实际应用,学会知识与实际结合、与实践结合,得以充分利用知识为以后工作打下了坚实的基础。 编者 2012年5月 目录 摘要 (1) 前言 (2) 目录 (3) 第一章水轮机型号选择 (5) 第一节水轮机型的选择 (5) 第二节初选水轮机基本参数的计算 (6) 第三节水轮机运转综合特性曲线的绘制 (17) 第四节待选方案的综合比较和确定 (19) 第二章蜗壳计算 (21) 第一节蜗壳形式、进口断面参数选择 (21) 第二节蜗壳各断面参数计算 (23) 第三节金属蜗壳图 (25) 第三章尾水管选型 (26) 第四章水轮发电机的初步选择计算 (27) 第五章调节保证计算及设备的选择 (33) 第一节调节保证计算 (33)
水轮机作业
第1章 概论 (一) 单项选择题 1.水轮机的工作水头是( )。 (A )水电站上、下游水位差 (B )水轮机进口断面和出口断面单位重量水流的能量差 2.水轮机的效率是( )。 (A )水轮发电机出力与水流出力之比 (B )水轮机出力与水流出力之比 3.反击式水轮机是靠( )做功的。 (A )水流的动能 (B )水流的动能与势能 4. 冲击式水轮机转轮是( )。 (A )整周进水的 (B )部分圆周进水的 5.喷嘴是( )水轮机的部件。 (A )反击式 (B )冲击式 (二)填空题 1.水电站中通过 把水能转变成旋转机械能,再通过 把旋转机械能转变成电能。 2.水轮机分为 和 两大类。 3.轴流式水轮机分为 和 两种。 4.水轮机主轴的布置形式有 和 两种。 5.冲击式水轮机有 、 和 三种。 (三)计算题 1.某水轮机的水头为18.6m ,流量为1130m 3/s ,水轮机的出力为180MW ,若发电机效率97.0=g η,求水轮机的效率和机组的出力g P 。 2.某水轮机蜗壳进口压力表的读数为a P 310650?,压力表中心高程为887m ,压力表所在钢管内径D = 6.0m ,电站下游水位为884m ,水轮机流量Q = 290 m 3/s ,若水轮机的效率%92=η,求水轮机的工作水头与出力。 第2章 水轮机的工作原理 (一) 单项选择题 1.水轮机中水流的绝对速度在轴面上的投影是( )。 (A )轴向分量z v (B )轴面分量m v 2.水轮机中水流的轴面分量m v 与相对速度的轴面分量m w ( )。 (A )相等 (B )不相等 3.水轮机输出有效功率的必要条件是( )。 (A )进口环量必须大于0 (B )进口环量必须大于出口环量 4.无撞击进口是指水流的( )与叶片进口骨线的切线方向一致。 (A )绝对速度 (B )相对速度 5.法向出口是指( )。 (A )出口水流的绝对速度是轴向的 (B )出口水流的绝对速度与圆周方向垂直 (二)填空题 1.水轮机转轮中的水流运动是 和 的合成。 2.水轮机轴面上所观察到的水流速度分量是 和 。
水轮机选型设计
第六章水轮机选型设计 由于各开发河段的水力资源和开发利用的情况不同,水电站的工作水头和引用流量范围也不同,为了使水电站经济安全和高效率的运行,就必须有很多类型和型式的水轮机来适应各种水电站的要求。 水轮机由于它自身能量特性、汽蚀特性和强度条件的限制,每种水轮机适用的水头和流量范围比较窄,要作出很多系列和品种(尺寸)的水轮机,设计、制造任务繁重,生产费用和成本也大。因此有必要使水轮机生产系列化、标准化和通用化,尽可能减少水轮机系列,控制系列品种,以便加速生产、降低成本。在水电站设计中按自己的运行条件和要求选择合适的水轮机。 一、水轮机选型设计的任务及内容 1.任务 水轮机是水电站中最主要动力设备之一,影响电站的投资、制造、运输、安装、安全运行、经济效益,因此根据H、N的范围选择水轮机是水电站中主要设计任务之一,使水电站充分利用水能,安全可靠运行。每一种型号水轮机规定了适用水头范围。水头上限是根据该型水轮机的强度和汽蚀条件限制的,原则上不允许超过;下限主要是考虑到使水轮机的运行效率不至于过低。 2.内容 (1) 确定机组台数及单机容量 (2) 选择水轮机型式(型号)及装置方式 (3) 确定水轮机的额定功率、转轮直径D1、同步转速n、吸出高度H s、安装高程Z a 、飞逸转速、轴向水推力;冲锤式水轮机,还包括喷嘴数目Z0、射流直径d0等。 (4) 绘制水轮机运转特性曲线 (5) 估算水轮机的外形尺寸、重量及价格、蜗壳、尾水管的形式、尺寸、调速器及油压装置选择 (6) 根据选定水轮机型式和参数,结合水轮机在结构上、材料、运行等方面的要求,拟定并向厂家提出制造任务书,最终由双方共同商定机组的技术条件,作为进一步设计的依据。 二、选型设计 1.水轮机选型设计一般有三种基本方法 (1) 水轮机系列型谱方法: 中小型水电站水轮机选多此种方法或套用法。
雕刻机操作作业指导书
雕刻机操作作业指导书 一、目的:规范设备操作,确保设备正常运转。 二、适用范围:适用于本公司所有雕刻机作业指导书 三、管理责任者 切割主管,设备主管. 四、操作规范 4.1、开机前,先检查机订外部电源是否接好,冰水机是否打开及上水。检查X轴,横梁上和Y防尘罩上面有杂物及工具,如有必须拿来开以免对机器造成不必要 的损坏! 4.2、检查一切正常后,打开电控柜操作面板上的电源开关,然后按启动按纽,注意急停是否打开,如没有打开把开关往右旋转一下方口打开。 4.3、待开机进入桌面后双击屏幕上的(Ncstudio)图标,待自动出现‘回机械原点’对话框,点击‘全部轴回机械原点’待全部动作完成后方可运动。 4.4、根据产品的加工要求选择合理的配置文件,在每交换一次配置文件操作成功后,必须回机械原点! 4.5、开启主轴,转动时有无杂音,如噪音过大应即时与机床供应商联系,装夹时清洗螺冒内的杂物,检查筒夹是否损坏,如有损坏请即时更换,刀具装夹不宜过长≤4倍刀杆直径,双头机装筒夹时,用千分表检测刀具的径向跳动,保证两个主轴刀具的径向跳动基本一致(<0.02MM). 4.6、确认‘工件坐标’与编程时的工作坐标是否一致,仔细检查程序是否正确,运行加工程序时,右手放于键盘上的停止键F11上,以免矢程序出错时及时停住。 4.7、机床停止工作时,清理好机床周边卫生,取下主轴夹头用机油浸泡以免生锈,主轴冷却水箱即冰水机每隔15天换一次水。 4. 8、冰水机异常时,请检查报警号,ER01报警表示水管堵塞,疏通水管即可消除报警,ER02报警表示冷凝器散热不良,清洗报警即可消除报警。 4. 9、机床丝杠、导轨润滑泵缺油报警时,加上30号机油即可消除报警。 4.10、软件驱动报警时,打开电箱前门,记录报警号,通知机床制造商处理。
支持向量机数据分类预测
支持向量机数据分类预测 一、题目——意大利葡萄酒种类识别 Wine数据来源为UCI数据库,记录同一区域三种品种葡萄酒的化学成分,数据有178个样本,每个样本含有13个特征分量。50%做为训练集,50%做为测试集。 二、模型建立 模型的建立首先需要从原始数据里把训练集和测试集提取出来,然后进行一定的预处理,必要时进行特征提取,之后用训练集对SVM进行训练,再用得到的模型来预测试集的分类。 三、Matlab实现 3.1 选定训练集和测试集 在178个样本集中,将每个类分成两组,重新组合数据,一部分作为训练集,一部分作为测试集。 % 载入测试数据wine,其中包含的数据为classnumber = 3,wine:178*13的矩阵,wine_labes:178*1的列向量 load chapter12_wine.mat; % 选定训练集和测试集 % 将第一类的1-30,第二类的60-95,第三类的131-153做为训练集 train_wine = [wine(1:30,:);wine(60:95,:);wine(131:153,:)]; % 相应的训练集的标签也要分离出来 train_wine_labels = [wine_labels(1:30);wine_labels(60:95);wine_labels(131:153)]; % 将第一类的31-59,第二类的96-130,第三类的154-178做为测试集 test_wine = [wine(31:59,:);wine(96:130,:);wine(154:178,:)]; % 相应的测试集的标签也要分离出来 test_wine_labels = [wine_labels(31:59);wine_labels(96:130);wine_labels(154:178)]; 3.2数据预处理 对数据进行归一化: %% 数据预处理 % 数据预处理,将训练集和测试集归一化到[0,1]区间 [mtrain,ntrain] = size(train_wine); [mtest,ntest] = size(test_wine); dataset = [train_wine;test_wine]; % mapminmax为MATLAB自带的归一化函数 [dataset_scale,ps] = mapminmax(dataset',0,1); dataset_scale = dataset_scale';
水轮机型号选择
水轮机型号选择 根据水电站的水头变化范围36.0m~38.0m,在水轮机洗力型谱表3-3,表3-4中查出适合的机型有HL240和ZZ440两种,现将这两种水轮机作为初选方案,分别求出有关参数,并进行比较分析。 一)HL240型水轮机方案的主要参数选择 1).转轮直径D1计算 查表3-6和图3-12可得HL240型水轮机在限制工况下的单位流量 Q '1 = 1.24 s m 3 效率m η =92%,由此可初步假定原型水轮机在该工况 下的单位流量Q '1=Q M '1=1.24s m 3 上述的 Q '1,η和额定出力r N =kw kw N gr gr 40816% 984==万η r H =36m 1D = η 2\3181.9Hr Q Nr '= 92 .03624.181.940816 2 \3??=4.109 m 选用与之接近而偏大的标称直径 D1=4.5m 2) 转速n 计算 查表3-4可得HL240型水轮机在最优工况下单位转速 M n 10 '=72min r ,初步假定10n '=M n 10'将已知的10n '和加权平均水头av H =36m, 1D =4.2m 代入 n= 965 .4367211 =?='D H n min r 故选用与之接近而偏大的用步转速n=100min r 3) 效率及单位参数修正 查表3-6可得HL240型水轮机在最优工况下的模型最高效率为 M m a x η=92% 模型转轮直径为M D 1=0.46m 根据式(3-14) ,求得原型效率 %9.945 .446.0)92.01(1)1(155 11max max =--=--=D D M M ηη则效率修正值为 %9.2%92%9.94max max =-=-=?M ηηη 考
用于分类的支持向量机
文章编号:100228743(2004)0320075204 用于分类的支持向量机 黄发良,钟 智Ξ (1.广西师范大学计算机系,广西桂林541000; 2.广西师范学院数学与计算机科学系,广西南宁530001) 摘 要:支持向量机是20世纪90年代中期发展起来的机器学习技术,建立在结构风险最小化原理之上的支持向量机以其独有的优点吸引着广大研究者,该文着重于用于分类的支持向量机,对其基本原理与主要的训练算法进行介绍,并对其用途作了一定的探索. 关键词:支持向量机;机器学习;分类 中图分类号:TP181 文献标识码:A 支持向量机S VM (Support Vector Machine )是AT&T Bell 实验室的V.Vapnik 提出的针对分类和回归问题的统计学习理论.由于S VM 方法具有许多引人注目的优点和有前途的实验性能,越来越受重视,该技术已成为机器学习研究领域中的热点,并取得很理想的效果,如人脸识别、手写体数字识别和网页分类等. S VM 的主要思想可以概括为两点:(1)它是针对线性可分情况进行分析,对于线性不可分的情况,通过使用非线性映射算法将低维输入空间线性不可分的样本转化为高维特征空间使其线性可分,从而使得高维特征空间采用线性算法对样本的非线性特征进行线性分析成为可能;(2)它基于结构风险最小化理论之上在特征空间中建构最优分割超平面,使得学习器得到全局最优化,并且在整个样本空间的期望风险以某个概率满足一定上界. 1 基本原理 支持向量机理论最初来源于数据分类问题的处理,S VM 就是要寻找一个满足要求的分割平面,使训练集中的点距离该平面尽可能地远,即寻求一个分割平面使其两侧的margin 尽可能最大. 设输入模式集合{x i }∈R n 由两类点组成,如果x i 属于第1类,则y i =1,如果x i 属于第2类,则y i =-1,那么有训练样本集合{x i ,y i },i =1,2,3,…,n ,支持向量机的目标就是要根据结构风险最小化原理,构造一个目标函数将两类模式尽可能地区分开来,通常分为两类情况来讨论,(1)线性可分,(2)线性不可分. 1.1 线性可分情况 在线性可分的情况下,就会存在一个超平面使得训练样本完全分开,该超平面可描述为: w ?x +b =0(1) 其中,“?”是点积,w 是n 维向量,b 为偏移量. 最优超平面是使得每一类数据与超平面距离最近的向量与超平面之间的距离最大的这样的平面.最优超平面可以通过解下面的二次优化问题来获得: min <(w )= 12‖w ‖2(2) Ξ收稿日期:2004202206作者简介:黄发良(1975-),男,湖南永州人,硕士研究生;研究方向:数据挖掘、web 信息检索. 2004年9月 广西师范学院学报(自然科学版)Sep.2004 第21卷第3期 Journal of G u angxi T eachers Education U niversity(N atural Science Edition) V ol.21N o.3
水轮机选择(经典)
第四章水轮机选择 §4.1 水轮机的标准系列 由于各开发河段的水力资源和开发利用的情况不同,水电站的工作水头和引用流量范围也不同,为了使水电站经济安全和高效率的运行,就必须有很多类型和型式的水轮机来适应各种水电站的要求。 一、反击式水轮机的系列型谱 表4—1、4—2、4—3、4—4中给出了轴流式、混流式水轮机转轮的参数。 1)、水轮机的使用型号规定一律采用统一的比转速代号。 2)、每一种型号水轮机规定了适用水头范围。水头上限是根据该型水轮机的强度和汽蚀条件限制的,原则上不允许超过;下限主要是考虑到使水轮机的运行效率不至于过低。 二、水斗式水轮机转轮参数 表4—5,系列型谱尚未形成 三、水轮机转轮尺寸系列表(表4—6) 四、水轮发电机标准同步转速(表4—7) 五、水轮机系列应用范围图 为纵座标绘制某一系列水轮机应用范围。 以H为横座标,N 单 1、根据H r、N r→范围→D1,n。 2、水轮机吸出高度的确定H s:根据h s~H的关系曲线确定。 由H r→h s,H s=h s-▽/900
§4.2水轮机的选择 一、水轮机选择的意义、原则、内容 1、意义 水轮机是水电站中最主要动力设备之一,影响电站的投资、制造、运输、安装、安全运行、经济效益,因此根据H、N的范围选择水轮机是水电站中主要设计任务之一,使水电站充分利用水能,安全可靠运行。 2、原则 (1)、充分考虑电站特点(水文水能、电力系统技术条件,电站总体布置)。 (2)、有利于降低电站投资、运行费、缩短工期,提前发电 (3)、提高水电站总效率,多发电 (4)、便于管理、检修、维护,运行安全可靠,设备经久耐用 (5)、优先考虑套用机组 3、内容 (1)、确定机组台数及单机容量 (2)、选择水轮机型式(型号) (3)、确定水轮机转轮直径D1、n、H s、Z a;Z0、d0 (4)、绘制水轮机运转特性曲线
雕刻机操作步骤
1 雕刻机操作步骤 1.1 开机 在开机之前,首先确定机床与计算机所有连接正常,然后打开机床电源和计算机电源。在系统启动完毕后,进入Ncstudio TM数控系统。 1.2 机械复位(可选) 只有在有回机械原点功能的机床上,且需要时才涉及这节内容。 如果机床支持回机械原点操作,选择“回机械原点”菜单。机床将自动回到机械原点,并且校正系统坐标系统。 在某些情形下,如上次正常停机后,重新开机并继续上次的操作,用户不必执行机械复位操作。因为,Ncstudio TM系统在正常退出时,保存当前坐标信息。 另外,如果用户确认当前位置正确,也可以不执行此操作。 1.3 载入加工程序 在加工之前,用户一般要载入需要加工的程序,否则,一些与自动加工有关的功能是无效的。 选择“打开(F)|打开(Q)…”菜单,將弹出Windows标准的文件操作对话框,可以从中选择要打开文件所在的驱动器、路径以及文件名。 单击“打开”按钮后,加工程序就载入系统。此时,用户可按F2键,切换到“加工程序”窗口,查看当前加工程序。 1.4 手动操作 显示手动操作界面 选择“查看(V)|显示手动界面(M)”菜单项,参数显示窗口将显示一个手动操作界面,通过这个界面,您可以对机床进行手动操作。
手动移动 通过计算机数字小键盘上的相应键可对机床进行手动移动。此时小键盘上的NUMLOCK丁应亮。 相应键为: 6 ----- X轴正方向 4 ----- X轴负方向 8---- Y轴正方向 2 ----- 丫轴负方向 9---- Z轴正方向 1 ----- Z轴负方向 这些键与CTRL吉合后可实现机床的手动高速移动。 增加/减少深度 使用小键盘上的+/-键配合数字键可以快速增加或较少深度。 1.5 确定工件原点 在加工程序中的X、丫、Z三坐标的原点就是工件原点。在加工之前,我们需要把该位置同实际位置联系起来。步骤是: 把机床X、丫手动走到工件上的希望的原点位置,选择“把当前点设为工件原点”菜单,或者在坐标窗口把当前位置的坐标值清零,这样在执行加工程序时 就以当前位置为起点进行加工。 上述步骤完成了X、丫轴的工件原点设定,但是Z轴的工件原点设置需要更为精确的操作手段。本系统同机床硬件相配合提供了Z轴对刀功能。 选择“操作(O)|自动对刀(E)…”功能,完成自动对刀。 经过上述两步的操作,加工的工件原点已经确定了。 1.6 执行自动加工 自动加工指机床按所选的加工程序自动进行加工。 开始自动加工 选择“操作(Q)|开始或继续(S)”菜单项,机床將自动从加工程序第一句 开始执行自动加工过程。 机床停止
水轮机选型
水轮机型号选择 根据已知的水能参数初选水轮机型号 最大工作水头:H max =Z 上max -Z 下min -△h=609.86-573.12-1.732=35 m 最小工作水头:H min =Z 上min -Z 下max -△h=607.78-574.27-1.732=31.77m 平 均 水 头:H a =12 (H max +H min )= 1 2 ×(35.85+31.35)=33.4 m 查水电站机电设备手册根据我国小型反击式水轮机适应范围参考表初选水轮机型号。 初选水轮机型号:HL240-LJ-140 水轮机类型 混流式 转轮型号 HL240 最大水头 35m 最小水头 31.77m 设计水头 33m 出力 3400kw 校核机组的稳定性 水轮机主要参数的计算: HL240-LJ-140型水轮机方案主要参数的计算: 转轮直径计算 Nr=3400/0.95=3368.42kw Hr=33.4m D 1= M Hr Q Nr η23 181.9' (1-3) 式中: Nr-为水轮机的额定出力(kw ) D 1 -为水轮机的转轮直径(m ) ηM -为水轮机的效率 Hr-为设计水头(m ) Q 1′--为水轮机的单位流量(m 3/s ) 由水力机械课本附表1中查得Q 1′=12.4 L/s=1.24m 3/s,同时在附表1中查得
水轮机模型在限制工况下的效率ηM =90.4%,由此可初步假定水轮机在该工况的效率为92.0% 将Nr=3400kw, Q 1′=1.24 m 3/s, Hr=33.4m, ηM =92%得 m D 12.192 .04.3324.181.942 .33682 31=???= 选择与之接近而偏大的标准直径D 1=1.40m 效率的修正值计算 由水力机械课本附表1查得水轮机模型在最优工况下的效率ηMmax =89.6%,模 型转轮直径D 1M =0.46m, 则原型水轮机的最高效率η max ,即: η max =1-(1-η Mmax )5 1 1D D M (1-4) 式中: ηmax --为原型水轮机的最高效率 η Mmax --为水轮机模型在最优工况下的效率 D 1M --为模型转轮直径 (m ) D 1 --为原型转轮直径 (m ) 将η Mmax =91.0% ,D 1M =0.46m, D 1=1.4m 带入得: η Mmax =1-(1-η max )5 1 1D D M =1-(1-0.91)54 .146.0 =92.8% 考虑到制造工艺水平的情况取ε1=1%由于水轮机所应用的蜗壳和尾水管的型式与模型基本相似,故认为ε2=0,则效率修正值Δη为: Δη=ηmax -η Mmax -ε 1 式中: Δη--为效率修正值 ηmax --为原型水轮机的最高效率 η Mmax --为水轮机模型在最优工况下的效率 将ηmax=0.928,ηMmax=0.91,ε1= 0.01带入上式得:
水轮发电机选择
水轮发电机的选择计算 一、 发电机型式的选择 水轮发电机按其轴线位置可分为立式布置和卧式布置两类,大中型机组一般采用立式布置,卧式布置通常用于中小型机组及贯流式机组。本电站采用立式布置,立式布置又分为悬式和伞式两种。悬式布置和伞式布置的适用条件,查参考【2】P 149表3-1,悬式适用于转速大于150/min r ,伞式适用于转速小于150/min r 。因为水轮机的标准转速为166.7r/min ,所以水轮发电机选用悬式布置。水轮发电机的冷却方式采用径向通风密闭式空气循环冷却。 二、 主要尺寸估算 待选水轮发电机的有关参数如下: 发电机型式:悬式 标准转速:166.7r/min 磁极对数:18 外形尺寸计算如下: 1、极距τ 根据统计资料分析,极距与每极的容量关系如下: 42p s K f j =τ cm 参考【2】P 159公式3-2 式中 9 ,,,10~8,:18 ;:); (:本设计中取线速度高的取上限容量大一般为系数磁极对数发电机额定容量j f K P p KVA s = f s =N f /cos &, cos &为功率因数角,取cos &取0.875。 f s =247423/ 0.875=282769KV A 。 4 18 *2282769 *9=τ=84.73 cm
由上求出τ后,尚应校核发电机在飞逸状态下,转子飞逸线速度V f 是否在转子材料允许范围内。 V K V f f = 参考【2】P 160公式3-3 式中 飞逸线速度 秒时在数值上等于极距周当频率转子额定线速度的比值确定与额定转速机组的飞逸转速与水轮机型式有关或按飞逸系数:;/50,:;,:f e f f V f V n n K τ= f K = f n /e n =308.4/166.7=1.85; V =τ=84.73 cm. V K V f f ==1.85*84.73=156.75m /s 查参【2】P 160,转子磁轭的材料用整圆叠片。 2、定子内径i D 计算公式: τπ p D i 2== 3.784*18 *2π =971.43 cm 参考【2】P 160公式3-4 3、定子铁芯长度t l 计算公式: e i f t n CD S l 2= cm 参考【2】P 160公式3-5 式中: 冷却方式为空冷 取表见参考系数定子内径额定转速发电机额定容量,107,53]2[,:); (:);(:); (:6160-?=-C P C cm D rpm n KVA S i e f .7 166*3.4971*107282769 26-?= t l =256.79 cm