飞行器姿态控制方法综述
人体下肢运动分析
大连理工大学 硕士学位论文 人体下肢运动分析 姓名:王晏 申请学位级别:硕士专业:通信与信息系统指导教师:孙怡 20050317
摘要 近些年来,人体运动的跟踪与分析在图像处理和计算机视觉领域引起许多学者的关注。这一课题在智能监视系统、虚拟现实、高级用户接口、运动分析和基于模型的图像编码等方面具有广阔的应用前景。利用图像序列进行人体运动的跟踪与分析包含四个基本内容:(1)从背景中提取运动目标;(2)从运动目标中分出人体目标;(3)运动人体的跟踪;(4)人体行为的理解与描述。其中,人体运动的跟踪和标定是人体运动跟踪与分析过程的关键,是进一步识别和理解人体运动行为的基础。本文提出了一种行走人体下肢关节点定位的算法。该算法是根据人行走时呈现的几何特性对人体的下肢关节点进行定位。 行走人体下肢关节定位算法处理的是由摄像机摄入的视频图像序列。首先经过背景去除,把人体区域从图像中提取出来。在得到干净的人体区域后,就可以获得人体的高度和宽度参数,以便进一步实现下肢关节点的定位。 经过背景去除和获得高度参数后,就要根据人体行走时所呈现的几何特征进行下肢关节点的定位。本文首先对侧面行走人体下肢关节点进行了定位。人在侧面行走时腿部长度是无失真的,因此,根据腿部的长度约束和关节点的运动约束进行了关节点定位。本文继而对正面行走人体下肢关节点进行了定位,对于正面行走的人体,其腿部长度在二维图像中有时会出现失真,因此,不能简单的根据腿部的长度约束进行定位。本文针对正面行走人体腿部边缘特性,结合腿部长度约束对膝关节进行了定位,并且根据腿部边缘特点对人体小腿长度进行了调整,运用调整后的小腿长度约束对人体踩关节进行了定位。在侧面行走人体和正面行走人体下肢关节定位的研究基础上,进一步研究了任意行走姿态下人体髋关节和膝关节的定位。根据人体行走时腿部的边缘信息用直线拟合的方法,并且结合腿部长度约束进行了膝关节的定位。 论文给出了侧面、正面以及任意行走姿态下人体下肢关节点定位的实验结果。对于侧面行走人体,本文检验了两种人体模型软件生成的人体行走序列,并且对实际拍摄的侧面人体行走序列也进行了髋关节和膝关节的定位。对于正面和任意行走姿态下的人体,只检验了由POSER3.0生成的模型序列。实验结果表明,本文所提出的算法可以对行走人体的下肢关节点进行较为准确的定位,并且算法简单易行,可
二维人体姿态估计研究综述
研究与开发 现代计算机2019.08上 文章编号:1007-1423(2019)22-0033-05 DOI :10.3969/j.issn.1007-1423.2019.22.007 二维人体姿态估计研究综述 李崤河,刘进锋 (宁夏大学信息工程学院,银川750021) 摘要: 人体姿态估计一直是计算机视觉中一个备受关注的研究热点,在智能安防、人机交互、动作识别等领域有着重要的研究价值。近年来,随着深度学习技术的快速发展,人体姿态估计效果不断提升,已经开始广泛应用于计算机视觉的相关领域。梳理二维人体姿态估计算法的发展与现状,总结传统算法与基于深度学习的姿态估计算法的发展与改进,并做出对比;讨论二维人体姿态估计所面临的困难与挑战,并对未来的发展方向做出展望。关键词: 深度学习;人体姿态估计;关键点检测基金项目: 宁夏高等学校科学研究项目(No.NGY2015044) 0引言 人体姿态估计长久以来一直是计算机视觉领域的 一个热点问题。其主要内容,是让计算机从图像或视频中定位出人物的关键点(也称为关节点,如肘、手腕等)。人体姿态估计作为理解图像或视频中人物动作的基础,一直受到众多学者的关注。随着计算机技术的迅猛发展,人体姿态估计已经在动作识别、人机交互、智能安防、增强现实等领域获得了广泛应用。 人体姿态估计按维度可分为二维和三维两种:二维人体姿态估计通常使用线段或者矩形来描述人体各关节在图像上的投影位置,线段的长度和角度表示了人体的二维姿态;三维人体姿态估计通常使用树模型来描述估计的姿态,各关节点的位置使用三维坐标确定。在实际应用中,目前获取的大多数图像仍是二维图像,同时三维姿态估计可以使用二维预测进行推理[1],所以二维姿态估计有着重要的研究价值。 自人体姿态估计的概念提出以来,国内外的学者对此做出了不懈的努力。传统的姿态估计算法主要是基于图结构(Pictorial Structures )模型[2] 。该模型将人或物体表示为多个部件的集合,这些部件之间含有空间约束,通过人工指定的特征检测组件实现关节点检 测。传统方法过于依赖手工设计的模板,难以应付复杂的姿态变换并且推广到多人姿态估计。 随着深度学习技术在计算机视觉领域大放异彩,部分学者开始研究如何利用深度学习来解决人体姿态估计问题。Toshev 等人利用深度卷积神经网络对人体姿态进行全局推断,提出了完全基于神经网络的模型DeepPose [3]。DeepPose 是第一个将深度学习方法应用于人体姿态估计的主要模型。该模型实现了SOTA 性能并击败了当时的传统模型。之后,越来越多基于深 度学习的人体姿态估计方法相继提出。 本文总结了近几年来二维人体姿态估计的发展历程,从早期的基于模板匹配算法到目前的基于深度学习的姿态估计算法,分析比较相关算法的优缺点及性能,并结合现有问题对未来发展进行了展望。1传统算法 早期的人体关键点检测算法基本都是在几何先验 的基础上基于模板匹配的思路进行的,其中Fischler [2]于1973年提出的图结构是其中一个较为经典的算法思路。它将物体表示为多个部件的集合,部件之间具有一定的空间约束。2005年,Felzenszwalb 和Huttenlo?
轴飞行器作品说明书
四轴飞行器 作品说明书 摘要 四轴飞行器在各个领域应用广泛。相比其他类型的飞行器,四轴飞行器硬件结构简单紧凑,而软件复杂。本文介绍四轴飞行器的一个实现方案,软件算法,包括加速度计校正、姿态计算和姿态控制三部分。校正加速度计采用最小二乘法。计算姿态采用姿态插值法、需要对比这三种方法然后选出一种来应用。控制姿态采用欧拉角控制或四元数控制。 关键词:四轴飞行器;姿态;控制
目录 1.引言 (1) 2.飞行器的构成? (1) .硬件构成..............................................1? 机械构成 (1) 电气构成 (3) .软件构成 (3) 上位机 (3) 下位机........... . (4) 3.飞行原理........... ................................ (4) . 坐标系统 (4) .姿态的表示 (5) .动力学原理 (5) 4.姿态测量........... ................................ (6) .传感器校正 (6) 加速度计和电子罗盘 (6) 5.姿态控制 (6) .欧拉角控制 (6) .四元数控制 (7) 6.姿态计算 (7) 7.总结 (8) 参考文献 (9)
四轴飞行器最开始是由军方研发的一种新式飞行器。随着MEMS?传感器、单片机、电机和电池技术的发展和普及,四轴飞行器成为航模界的新锐力量。到今天,四轴飞行器已经应用到各个领域,如军事打击、公安追捕、灾害搜救、农林业调查、输电线巡查、广告宣传航拍、航模玩具等。 目前应用广泛的飞行器有:固定翼飞行器和单轴的直升机。与固定翼飞行器相比,四轴飞行器机动性好,动作灵活,可以垂直起飞降落和悬停,缺点是续航时间短得多、飞行速度不快;而与单轴直升机比,四轴飞行器的机械简单,无需尾桨抵消反力矩,成本低?。 本文就小型电动四轴飞行器,介绍四轴飞行器的一种实现方案,讲解四轴飞行器的原理和用到的算法,并对几种姿态算法进行比较。 2.飞行器的构成 四轴飞行器的实现可以分为硬件和软件两部分。比起其他类型的飞行器,四轴飞行器的硬件比较简单,而把系统的复杂性转移到软件上,所以本文的主要内容是软件的实现。? .硬件构成? 飞行器由机架、电机、螺旋桨和控制电路构成。 机械构成? 机架呈十字状,是固定其他部件的平台,本项目采用的是碳纤维材料的机架。电机采用无刷直流电机,固定在机架的四个端点上,而螺旋桨固定在电机转子上,迎风面垂直向下。螺旋桨按旋转方向分正桨和反桨,从迎风面看逆时针转的为正桨,四个桨的中心连成的正方形,正桨反桨交错安装。 CA D设计机架如图: 整体如图2-1: 电气构成 电气部分包括:控制电路板、电子调速器、电池,和一些外接的通讯、传感器模块。控制电路板是电气部分的核心,上面包含MCU、陀螺仪、加速度计、电子罗盘、气压计等芯片,负责计算姿态、处理通信命令和输出控制信号到电子调速器。电子调速器简称电调,用于控制无刷直流电机。 电气连接如图2-2所示。 .软件构成
飞机控制系统的外回路主要用于控制和操纵飞机的姿态运动
901 飞机控制系统的外回路主要用于 3 控制和操纵飞机的姿态运动控制飞机质心的轨迹运动 控制和操纵飞机的航路控制飞机外部操纵系统 902 飞机的自动驾驶仪通常有()两个通道。 2 速度通道和姿态通道横滚通道和俯仰通道数字通道和模拟通道计算通道和控制通道 903 现代民航飞机多采用的座舱压力控制器是 4 直接气动式间接气动式主动控制式电子式 904 消除刹车松软的有效措施是()。 4 更换刹车摩擦块用清洁剂清洁刹车块润滑刹车块刹车系统排气905 自动驾驶仪由()组成。2 计算机、控制面板、惯导系统、飞行管理系统 传感器、控制面板、反馈回路、伺服系统、比较放大器 传感器、计算机、控制面板、显示控制组件、显示器 陀螺、推力管理系统、反馈回路、伺服系统、比较放大器 906 下列哪一项不是电子式防滞系统的功能? 4 接地保护锁轮保护控制机轮滑移率控制刹车计量活门来调定刹车压力907 确定刹车系统中存在的空气已全部排除的方法是()。 3 观察刹车脚蹬行程 观察液压油箱的目视油量表,直到无液体流动为止 连接放气管到刹车装置放气活门,实施刹车,直到流出的油液没有气泡 实施刹车时,观察刹车压力表是否平稳地向全刻度方向偏转 908 定量泵液压系统,发现比平时卸荷频繁,然而又没有不正常的渗漏现象,其最大可能原因是()。4 安全活门调节的压力过高。油箱通气管堵塞。油箱中的油液过多。储压器充气压力不足。 909 当给液压系统储压器放气时,如果液压油从充气活门芯中放了出来,这表明()。 4 储压器充气压力过大。系统压力过高。单向活门内漏。储压器活塞密封损坏。
910 外场检查多盘式刹车装置磨损量的方法是()。 3 用专用测量塞规测量刹车盘片间隙松开停留刹车,观察磨损指示销伸出量设置停留刹车,观察磨损指示销伸出量用探伤方法探测刹车片表面状态 911 电子式防滞刹车系统比惯性传感器式的防滞系统效率高的原因是()。 3 利用轮速传感器感受机轮的减速度连续控制飞机的滑跑速度 连续控制机轮与地面之间的滑移率在飞机着陆后驾驶员可以把脚蹬踏板压倒最大刹车压力位置 912 惯性防滞刹车系统中防滞传感器的功用是()。 4 减小刹车阻力提高刹车效率减小刹车压力感受机轮的滞动情况 913 前轮转弯系统中压力补偿器的作用为()。 2 提高液压供油压力使转弯作动筒的低压腔保持一定的压力,实现中立减摆 当供压系统失效时,作为应急动力源拖行释压 914 现代民用运输机主油箱的型式为()。 4 软式油箱硬式油箱半硬式油箱结构油箱 915 组成定量泵卸荷系统的基本附件,除了液压泵外应有()。 4 安全活门、选择活门、旁通活门和作动筒。单向活门、选择活门、安全活门和储压器。 单向活门、安全活门、卸荷活门和作动筒。单向活门、卸荷活门和储压器。 916 轮胎充气压力过低,对轮胎磨损情况的影响是()。 2 不引起轮胎特殊损伤引起胎肩过度磨损引起整个胎面过度磨损引起胎缘损伤 917 在拆卸一个液压系统的增压油箱之前()。 2 要操纵液压系统工作,以释放压力。通过人工释压活门释放油箱中的空气压力。 要释放储压器的压力。要断开所有电源。 918 对于压力加油系统,当油箱油量达到设定油量时,如何关断加油活门?3 人工监控油箱加油流量表,当加油流量减小到规定值时,手动关断 人工监控油箱油量表,手动关断 利用浮子电门,自动关断 利用浮子直接堵住加油管,加油活门在回压作用下关闭 919 下面哪条不是对放油系统的要求? 3
人体姿态捕捉方法综述
人体姿态捕捉方法综述 XXX (大连理工大学软件学院,辽宁大连116600) 摘要:人体姿态捕捉技术在人机交互和虚拟现实等领域的重要性日益突出,为了满足人们对于高精确度、高效率的动作捕捉技术的需求,科学家从各个方面进行了创新性的尝试。文章介绍了动作捕捉技术发展历史,并给出了其概念和基本组成;并阐述了目前国内外发展现状;其次详细地对主流方案进行优缺点分析;然后结合现实,给出了常见应用领域;最后对动作捕捉技术面临难题进行总结并介绍了发展趋势。 关键词:动作捕捉;虚拟技术;人机交互;算法 Overview of Human gesture capture XXX (Dalian university of technology College of Software,Liaoning Dalian 116600)Abstract:The human body gesture capture technology in human-computer interaction and virtual reality and other areas of importance is day by day prominent, in order to meet people for high accuracy, high efficiency of motion capture technology needs, scientists from all aspects of innovative attempt. This paper introduces the motion capture technology development history, and gives the concept and basic composition; And expounds the current situation of the development at home and abroad; Secondly detail schemes to mainstream advantages and disadvantages analysis; And then combining with reality, gives the common application fields; Finally, the motion capture technology difficulties was summarized and introduced the development trend. Key words: Motion capture ;Virtual technology;Human-computer interaction;Algorithm
四轴飞行器电机控制模块设计
四轴飞行器电机控制模块设计
密级: NANCHANG UNIVERSITY 学士学位论文THESIS OF BACHELOR (2011—2015年) 题目四轴飞行器电机控制模块设计 学院:信息工程学院系自动化系专业班级:测控技术与仪器111班学生姓名:吕晴学号:5801211011 指导教师:张宇职称:讲师起讫日期:2015-3-5 ~ 2015-6-2
南昌大学 学士学位论文原创性申明 本人郑重申明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果。对本文的研究作出重要贡献的个人和集体,均已在文中以明确方式表明。本人完全意识到本申明的法律后果由本人承担。 作者签名:日期: 学位论文版权使用授权书 本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权南昌大学可以将本论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。 保密□,在年解密后适用本授权书。 本学位论文属于 不保密□。 (请在以上相应方框内打“√”) 作者签名:日期: 导师签名:日期:
摘要 四轴飞行器电机控制模块设计 专业: 测控技术与仪器学号: 58012110011 学生姓名:吕晴指导老师:张宇 摘要 本课题是针对四轴飞行器在已经获得传感器测得的精确数据的情况下,设计合理的电路和算法,实现四轴飞行器稳定飞行和各种姿态变换。本课题的主要内容是对四轴飞行器的电机控制模块进行软硬件设计。 四轴飞行器是智能机器人的一种,它是由四个旋翼旋转产生升力,通过协调各旋翼的转速来实现飞行器的姿态控制。与传统的无人机相比,四轴飞行器具有很强的机动灵活性和载荷能力,特别适合在理想稳态或者准稳态的飞行条件下进行全方位垂直起降,在军事和民用领域均拥有广阔的发展前景[2]。 本论文对四轴飞行器的电机控制模块进行了调研,并设计出了相关的硬件电路板以及软件控制算法。具体内容如下: 首先建立四轴飞行器的动力学模型,四轴飞行器的动力学建模分为力学建模和运动学建模两个部分,总体思想是将四轴飞行器看作一个刚体,选定当前的姿态角和目标姿态为输入量,在理想的条件下,推导出控制四轴飞行器所需的四个电机的控制量作为输出量的方程,即建立四轴飞行器受力与姿态之间的关系。 其次对四轴飞行器电机控制模块进行合理的硬件设计,硬件部分分为了电源模块、主控模块、电机驱动模块、检测模块、无线通讯模块五个模块。其中选择了STM32系列单片机作为主控模块的微处理器,选择了三相无刷直流电机作为动力源,无刷电调对其进行调速。 再次设计合理的控制算法,本课题采用了经典PID算法,临界比例度法对PID参数进行了初步整定,再在试验中对参数进行微调。 最后针对四轴飞行器电机控制模块设计了合理的软件流程。 关键词:四轴飞行器;动力学模型;电机;PID控制算法
四轴飞行器原理、设计与控制
四轴飞行器原理、设计与控制 四轴飞行器设计与用途 学院:广东白云技师学院 专业:电子信息工程与电气技术(技师本科) 制作学生:邹剑平 指导老师:廖高灵 四轴飞行器简介 配置: 单片机AVRATMEGA168PA 三轴数字陀螺仪MPU—3050电机(无刷)XXD22121000KV电子调速器(无刷)好盈天行者40A螺旋桨1045 电池格氏2200mAh11.1V25C机架DIY 机架材料玻璃纤维铝合金 四轴飞行器飞行原理 重心的距离相等,当对角两个轴产生的升力相同时能够保证力矩的平衡,四轴不会向任何一个四轴飞行器有四个电机呈十字形排列,驱动四片桨旋转产生推力;四个电机轴距几何中方 向倾转;而四个电机一对正转,一对反转的方式使得绕竖直轴方向旋转的反扭矩平衡,保证了四轴航向的稳定. 此飞行控制板规定四轴电机的排布方式如图所示:前(1号),后(4号),右(3号),左(2号). 1,4号电机顺时针方向旋转,2,3号电机逆时针方向旋转.四个电机的转速做相应的变化即可实现四轴横向、纵向、竖直方向和偏航方向上的运动:
当四轴需要向前方运动时,2,3号电机保持转速不变,1号电机转速下降,4号电机转速上升,此时4号电机产生的升力大于1号电机的升力,四轴就会沿几何中心向前倾转,桨叶升力沿纵向的分力驱动四轴向前运动. 当四轴要转向左转向时,1,4号电机转速上升,2,3号电机转速下降,使向左的反扭距大于向右的反扭矩,四轴在反扭距的作用下向左旋转. 四个桨产生的推力,超过或者低于四轴本身重力的时候能够实现竖直方向上升与下降的运动,当桨的升力与四轴本身的重力相等的时候即实现悬停. 其他方式的运动原理与以上过程类似.四轴飞行原理虽然简单,但实现起来还需很多工作要做. 四轴飞行器控制流程图 四轴飞行器的优点 四轴飞行器与其他飞机比较相对稳定性高;四轴飞行器与其他飞机比较相对抗风能力强;载重量大(本机最大安全载重1100g);姿态灵活,反应速度快;可超低空飞行; 四轴飞行器主要用途 可做无人侦察机,空中航拍(FPV),可作为新型微型机器人。娱乐飞行表演 四轴飞行器的特点及魅力除了深受DIY爱好者的青睐之外,还有几点供大家品味: 1、是它的相对简单地机械构造。正因为简单,安全指数大大提高。 无论是作为航空模型还是作为遥控平台,安全永远是第一位的。 2、是它的相对稳定性。飞行姿态平滑稳定,机械振动被仅可能地减小是四轴的又一魅力,装载图像设备再好不过了。 3、是它的相对成本低廉,花尽可能少的钱获取最大的性价比是我们追求的境界,为工业开发其商业用途奠定了必要的基础。
飞行器姿态控制法综述
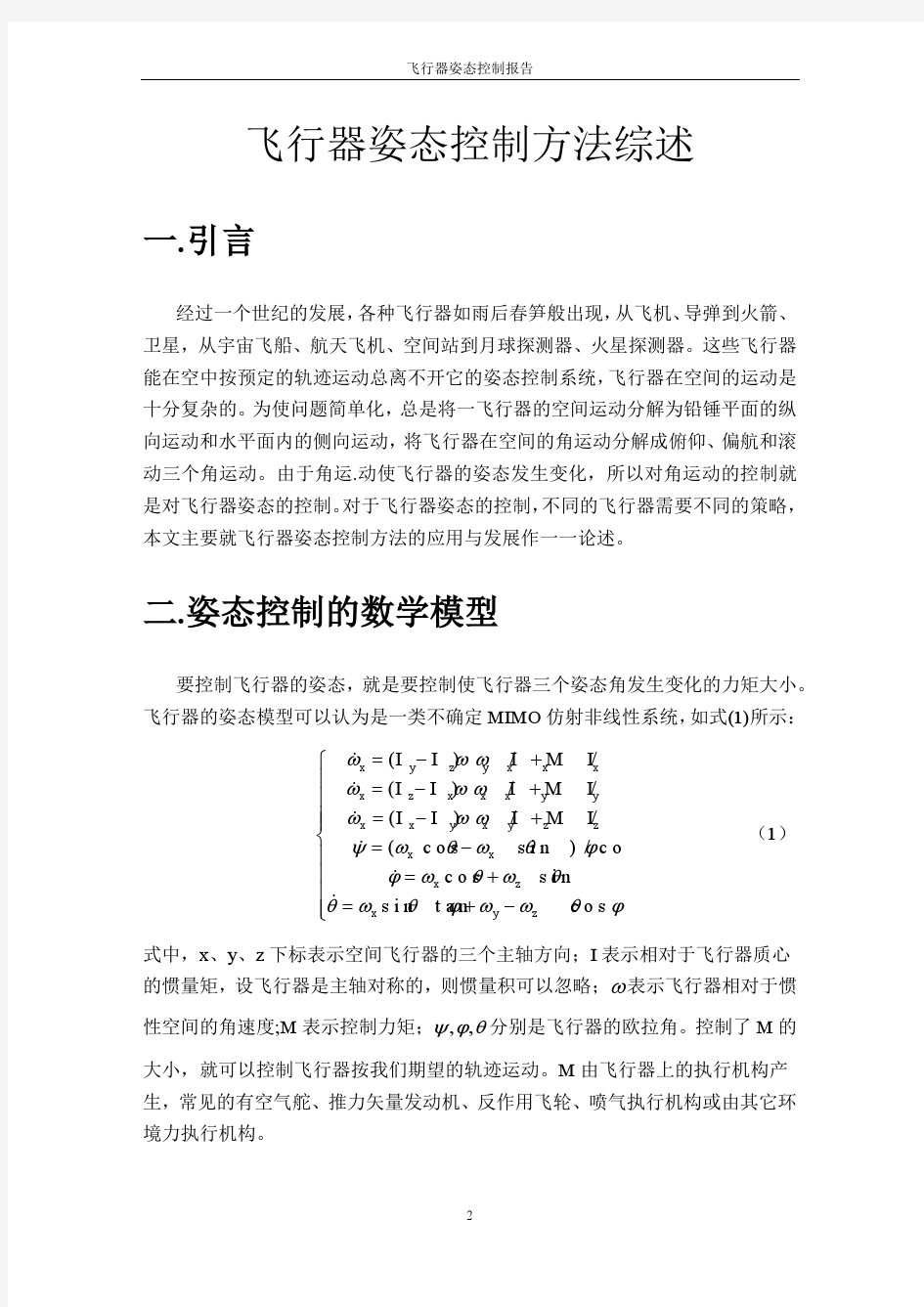
飞行器姿态控制方法综述 一.引言 经过一个世纪的发展,各种飞行器如雨后春笋般出现,从飞机、导弹到火箭、卫星,从宇宙飞船、航天飞机、空间站到月球探测器、火星探测器。这些飞行器能在空中按预定的轨迹运动总离不开它的姿态控制系统,飞行器在空间的运动是十分复杂的。为使问题简单化,总是将一飞行器的空间运动分解为铅锤平面的纵向运动和水平面内的侧向运动,将飞行器在空间的角运动分解成俯仰、偏航和滚动三个角运动。由于角运.动使飞行器的姿态发生变化,所以对角运动的控制就是对飞行器姿态的控制。对于飞行器姿态的控制,不同的飞行器需要不同的策略,本文主要就飞行器姿态控制方法的应用与发展作一一论述。 二.姿态控制的数学模型 要控制飞行器的姿态,就是要控制使飞行器三个姿态角发生变化的力矩大小。飞行器的姿态模型可以认为是一类不确定MIMO 仿射非线性系统,如式(1)所示: ()//()//()//(cos sin )/cos cos sin sin tan cos tan x y z y x x x x x z x x x y y y x x y x y z z z x x x z x y z I I I M I I I I M I I I I M I ωωωωωωωωωψ ωθωθ??ωθωθ θωθ?ωωθ?=-+??=-+??=-+??=-??=+?=+-?? (1) 式中,x 、y 、z 下标表示空间飞行器的三个主轴方向;I 表示相对于飞行器质心的惯量矩,设飞行器是主轴对称的,则惯量积可以忽略;ω表示飞行器相对于惯性空间的角速度;M 表示控制力矩;,,ψ?θ分别是飞行器的欧拉角。控制了M 的大小,就可以控制飞行器按我们期望的轨迹运动。M 由飞行器上的执行机构产生,常见的有空气舵、推力矢量发动机、反作用飞轮、喷气执行机构或由其它环境力执行机构。 三.飞行器姿态控制方法 3.1空气动力控制 根据运动的相对性原理和气体流动时的基本定律,当飞行器在大气中以一定
基于视频的人体姿态检测方法及其应用综述
2019.09 1 研究现状与技术发展趋势 1.1单人骨架检测方法 人体骨架关键点对于描述人体姿态和预测人体行为 十分重要,它是很多计算机视觉技术的基础步骤,例如行为预测,智能监控等方面。近年来,随着人体骨架关键点检测效果的不断提升,开始比较广泛地应用于计算机视觉的相关工作中,其中,单人骨架检测是这些工作的入门基础和最简单的实践任务。1.2姿态卷积网络 姿态卷积网络(Convolutional Pose Machines,简称 CPM [1])由一系列卷积网络组成,这些卷积网络重复产 生每个部分位置的2D 置信图(2D belief maps,表征对整体骨架的一种预测),在CPM 的每个阶段,把图像特征和上一阶段所产生的置信图作为输入。为后续的阶段提供每个部分位置的空间不确定性的非参数编码,它不是通过几何处理[2][3]或者专门的后续处理步骤[4]来显性地处解析这种置信图,而是通过隐式直接从数据中学习图像和附近区域特征的方式。 同时使用多阶段监督,来避免网络过深而导致的梯度丢失导致无法进行优化 [5][6] ,除了第一阶段之外(因为 第一阶段网络的作用是预测初步的结果),对于每个阶段的预测输出都要进行监督训练从而通过反向传播来对上一个阶段的与猜测结果进行一定程度的优化和修正。 两层之间损失函数如下(见式1,式2),其中f 为 每层的损失函数,F 为总损失函数[1] : (1) (2) CPM 的流程图如图1所示。 1.3多情景关注机制 在关注一张图片的时候,通过关注图片的不同尺度 可以更准确地对人体姿态进行分析,一些局部信息,对于比如脸部、肘部的特征判断很有必要,而最终的整体姿态需要对人体进行整体理解,不同的尺度下分析可能体现更多信息,比如人体的动作,相邻节点的关系等,这是多情景关注机制的理论基础。 作者简介:连仁明(1979-),男,本科,工程师,研究方向:计算机技术。收稿日期:2019-06-14 基于视频的人体姿态检测方法及其应用综述 连仁明,刘颖,于萍,刘畅 (91001部队,北京100841) 摘 要:视觉是人类认知周围事物的重要感知。随着人类对于视频处理需求的不断增长和计算机性能 与技术的不断发展,我们希望计算机能够在特定场合具有部分与人类视觉类似的视觉功能,并且对于这种视觉功能有一定的初步处理和判断功能。基于视频的人体姿态检测是理解和识别人与人的交互运动,人与环境交互关系等。通过相关的计算机技术,实现对于视频中人的检测,动作分析以及涉及多人交互情境下的行为分析和关系分析等。尽管这种分析对于人的视觉以及大脑似乎是一件不算困难的任务,但是随着时代的发展,视频的规模不断扩大,仅仅依靠人眼进行识别是远远不能够满足现代社会需要,通过计算机技术进行识别已经成为一种必然需求。但对于计算机而言,因为涉及到背景环境的复杂性,人类体态的多样性,运动习惯的差异性,在视频中能够较为精确检测人的位置,分析人的行为还是一件比较有挑战性的任务。关键词:人体检测;计算机识别技术;情景 图1CPM 方法卷积网络流程以及效果示例 [1] 127
四轴飞行器说明书
四轴飞行器 作品名称:四轴飞行器 工作原理:四轴飞行器主机采用了意法半导体公司的STM32F103CBT6处理器,该芯片采用ARM32位Cortex-M3内核。具有128K的Flash与20K的SRAM,内部具有锁相环模块,最高频率可达到72MHZ。板载MPU6050,该芯片整合了3轴陀螺仪与3轴加速器的6轴运动处理组件,与处理器采用I2C通信进行数据传送。主机与遥控之间采用的是NRF24L01+模块,该模块工作在2.4~2.5GHz全球免申请ISM工作频段。支持125个通讯频率。使用增强型的Enhanced ShockBurst传输模式,支持6个数据通道(共用FIFO)。通过SPI与MCU连接,速率0~8Mbps。理论传输距离可达到2KM。 飞行器遥控器亦采用STM32F103CBT6处理器,通过摇杆的X,Y轴输出为两个电位器,再通过AD转换读出扭动角度,从而在程序内部定义其所读取角度信息的动作映射。遥控器具有三组微调旋钮,可以调整到其水平位置。遥控器也使用NRF24L01+芯片与飞行器主机进行数据传输。遥控器板载TP4057芯片,可以直接给电池充电。并且使用蜂鸣器,对主机状态(例如:无法连接,低电压,连接断开等)进行报警。 制作材料: 1.STM32F103CBT6:该芯片由意法半导体生产,采用ARM32位Cortex-M3内核。 具有128K的Flash与20K的SRAM,芯片集成丰富的外设,例如:定时器,CAN,ADC,SPI,I2C,USB,UART,PWM等。内部具有锁相环模块,最高频率可达到72MHZ。 2. MPU6050,全球首例整合性6轴运动处理组件,整合了3轴陀螺仪、3轴加速器, 并含可藉由第二个I2C端口连接其他厂牌的加速器、磁力传感器、或其他传感器的数位运动处理(DMP: Digital Motion Processor)硬件加速引擎,由主要I2C端口以单一数据流的形式,向应用端输出完整的9轴融合演算技术InvenSense的运动处理资料库,可处理运动感测的复杂数据,降低了运动处理运算对操作系统的负荷,并为应用开发提供架构化的API。 3. NRF24L01+:一款新型单片射频收发器件,工作于2.4 GHz~2.5 GHz ISM频段。 内置频率合成器、功率放大器、晶体振荡器、调制器等功能模块,并融合了增强型ShockBurst技术,其中输出功率和通信频道可通过程序进行配置。nRF24L01功耗低,在以-6 dBm的功率发射时,工作电流也只有9 mA;接收时,工作电流只有12.3 mA,
四轴飞行器姿态控制算法
姿态解算 姿态解算(attitude algorithm),是指把陀螺仪,加速度计, 罗盘等的数据融合在一起,得出飞行器的空中姿态,飞行器从陀螺仪器的三轴角速度通过四元数法得到俯仰,航偏,滚转角,这是快速解算,结合三轴地磁和三周加速度得到漂移补偿和深度解算。 姿态的数学模型坐标系 姿态解算需要解决的是四轴飞行器和地球的相对姿态问题。地理坐标系是固定不变的,正北,正东,正上构成了坐标系的X,Y,Z轴用坐标系R表示,飞行器上固定一个坐标系用r表示,那么我们就可以适用欧拉角,四元数等来描述r和R的角位置关系。 姿态的数学表示 姿态有多种数学表示方式,常见的是四元数,欧拉角,矩阵和轴角。在四轴飞行器中使用到了四元数和欧拉角,姿态解算的核心在于旋转。姿态解算中使用四元数来保存飞行器的姿态,包括旋转和方位。在获得四元数之后,会将其转化为欧拉角,然后输入到姿态控制算法中。姿态控制
算法的输入参数必须要是欧拉角。AD值是指MPU6050的陀螺仪和加速度值,3个维度的陀螺仪值和3个维度的加速度值,每个值为16位精度。AD值必须先转化为四元数,然后通过四元数转化为欧拉角。在四轴上控制流程如下图: 下面是用四元数表示飞行姿态的数学公式,从MPU6050中采集的数据经过下面的公式计算就可以转换成欧拉角,传给姿态PID控制器中进行姿态控制.
PID控制算法 先简单说明下四轴飞行器是如何飞行的,四轴飞行器的螺旋桨与空气发生相对运动,产生了向上的升力,当升力大于四轴的重力时四轴就可以起飞了。四轴飞行器飞行过程中如何保持水平:我们先假设一种理想状况:四个电机的转速是完全相同的是不是我们控制四轴飞行器的四个电机保持同样的转速,当转速超过一个临界点时(升力刚好抵消重力)四轴就可以平稳的飞起来了呢?答案是否定的,由于四个电机转向相同,四轴会发生旋转。我们控制四轴电机1和电机3同向,电机2电机4反向,刚好抵消反扭矩,巧妙的实现了平衡, 但是实际上由于电机和螺旋
四轴飞行器名词解释
四轴飞行器名词解释 网上找的,自己稍微整理的一下: 1、遥控器篇 什么是通道? 通道就是可以遥控器控制的动作路数,比如遥控器只能控制四轴上下飞,那么就是1个通道。但四轴在控制过程中需要控制的动作路数有:上下、左右、前后、旋转 所以最低得4通道遥控器。如果想以后玩航拍这些就需要更多通道的遥控器了。 什么是日本手、美国手? 遥控器上油门的位置在右边是日本手、在左边是美国手,所谓遥控器油门,在四轴飞行器当中控制供电电流大小,电流大,电动机转得快,飞得高、力量大。反之同理。判断遥控器的油门很简单,遥控器2个摇杆当中,上下板动后不自动回到中间的那个就是油门摇杆。 2、飞行控制板篇 飞控的用途? 四轴飞行器相对于常规航模来说,最最复杂的就是电子部分了。之所以能飞行得很稳定,全靠电子控制部分对四轴飞行状态进行快速调整。在常规固定翼飞机上,陀螺仪并非常用器件,在相对操控难度大点的直机上,如果不做自动稳定系统,也只是锁尾才用到陀螺仪。四轴飞行器与其不同的地方是必须配备陀螺仪,这是最基本要求,不然无法飞行,更谈不上飞稳了。不但要有,还得是3轴向(X、Y、Z)都得有,这是四轴飞行器的机械结构、动力组成特性决定的。在此基础上再辅以3轴加速度传感器,这6个自由度,就组成了飞行姿态稳定的基本部分,也是关键核心部分---惯性导航模块,简称IMU。飞行中的姿态感测全靠这个IMU了,可见它是整架模型的核心部件。 什么是x模式和+模式?说白了就是飞行器正对着你本人的时候是呈现X形状还是+形状,之前有介绍过四轴原理的,前进的时候后面加速前面减速两侧不变那个是针对+模式的,而如果是X模式的话,前进就需要后面两个同时加速,前面两个同时减速了。据说X模式的稳定性比+模式的稳定性要高点。 注意:考虑到飞控板上的陀螺仪安装的是固定的,所以,模式不同的话飞控板的安装方向也是不同的。 3、电调篇 为什么需要电调? 电调的作用就是将飞控板的控制信号,转变为电流的大小,以控制电机的转速。 四轴飞行器四个桨转动时的离心力是分散的。不象直机的桨,只有一个能产生集中的离心力形成陀螺性质的惯性离心力,保持机身不容易很快的侧翻掉。所以通常用到的舵机控制信号更新频率很低。四轴为了能够快速反应,以应对姿态变化引起的飘移,需要高反应速度的电调,常规PPM电调的更新速度只有50Hz左右,满足不了这种控制所需要的速度,且PPM电调MCU内置PID稳速控制,能对常规航模提供顺滑的转速变化特性,用在四轴上就
航天器的姿态与轨道最优控制
航天器的姿态与轨道最优控制 董丽娜唐晓华吴朝俊司渭滨(第八小组) (西安交通大学电气工程学院,陕西省,西安市 710049) 【摘要】从航天器的轨道运动学方程出发, 运用线性离散系统最优控制理论, 提出了一种用于航天器轨道维持与轨道机动的最优控制方法, 建立了相关的最优控制模型并给出了求解该模型的算法。仿真计算结果表明, 本文提出的最优控制方法是正确和可行的。 【关键词】航天器轨道保持轨道机动最佳控制 Optimal Control of Spacecraft State and Orbit Dong LiNa,Tang XiaoHua,Wu ChaoJun,Si WeiBin (EE School of Xi’an Jiaotong university,Xi’an, Shannxi province, 710049)【Abstract】This paper provides a new optimal control method for orbital maintenance and maneuver ,which begins with the kinetics equation of spacecraft and is based on the linear discrete optimal control theory , establishes the relative optimal control model and gives its solution. The simulation results show that the given optimal control method in this paper is correct and feasible. 【Key word】Spacecraft ,Orbital keeping ,Orbital maneuver ,Optimal control 1 引言 一般地,常见的航天器有:运载火箭、人造卫星、载人飞船、宇宙飞船、空间站等。宇宙飞船也称太空飞船,它和航天飞机都是往返于地球和在轨道上运行的航天器(如空间站) 。
四轴飞行器作品说明书
四轴飞行器作品说明书
四轴飞行器在各个领域应用广泛。相比其他类型的飞行器,四轴飞行器硬件结构简单紧凑,而软件复杂。本文介绍四轴飞行器的一个实现方案,软件算法,包括加速度计校正、姿态计算和姿态控制三部分。校正加速度计采用最小二乘法。计算姿态采用姿态插值法、需要对比这三种方法然后选出一种来应用。控制姿态采用欧拉角控制或四元数控制。 关键词:四轴飞行器;姿态;控制
1.引言 (1) 2.飞行器的构成 (1) 2.1.硬件构成 (1) 2.1.1.机械构成 (1) 2.1.2.电气构成 (3) 2.2.软件构成 (3) 2.2.1.上位机 (3) 2.2.2.下位机........... . (4) 3.飞行原理........... ................................ (4) 3.1. 坐标系统 (4) 3.2.姿态的表示 (5) 3.3.动力学原理 (5) 4.姿态测量........... ................................ (6) 4.1.传感器校正 (6) 4.1.1.加速度计和电子罗盘 (6) 5.姿态控制 (6) 5.1.欧拉角控制 (6) 5.2.四元数控制 (7) 6.姿态计算 (7) 7.总结 (8) 参考文献 (9)
1.引言 四轴飞行器最开始是由军方研发的一种新式飞行器。随着MEMS传感器、单片机、电机和电池技术的发展和普及,四轴飞行器成为航模界的新锐力量。到今天,四轴飞行器已经应用到各个领域,如军事打击、公安追捕、灾害搜救、农林业调查、输电线巡查、广告宣传航拍、航模玩具等。 目前应用广泛的飞行器有:固定翼飞行器和单轴的直升机。与固定翼飞行器相比,四轴飞行器机动性好,动作灵活,可以垂直起飞降落和悬停,缺点是续航时间短得多、飞行速度不快;而与单轴直升机比,四轴飞行器的机械简单,无需尾桨抵消反力矩,成本低。 本文就小型电动四轴飞行器,介绍四轴飞行器的一种实现方案,讲解四轴飞行器的原理和用到的算法,并对几种姿态算法进行比较。 2.飞行器的构成 四轴飞行器的实现可以分为硬件和软件两部分。比起其他类型的飞行器,四轴飞行器的硬件比较简单,而把系统的复杂性转移到软件上,所以本文的主要内容是软件的实现。 2.1.硬件构成 飞行器由机架、电机、螺旋桨和控制电路构成。 2.1.1.机械构成 机架呈十字状,是固定其他部件的平台,本项目采用的是碳纤维材料的机架。电机采用无刷直流电机,固定在机架的四个端点上,而螺旋桨固定在电机转子上,迎风面垂直向下。螺旋桨按旋转方向分正桨和反桨,从迎风面看逆时针转的为正桨,四个桨的中心连成的正方形,正桨反桨交错安装。 CA D设计机架如图:
航天器控制大作业
航天器控制课程大作业 1.基本内容 ?建立带有反作用飞轮的三轴稳定对地定向航天器的姿态动力学和姿态运动学模型; ?基于欧拉角或四元数姿态描述方法,设计PD型或PID型姿态控制律(任选一种); ?利用MATLAB/Simulink软件建立航天器闭环姿态控制系统,设计姿态控制器进行闭合回路数学仿真,实现给定控制指标和 性能指标。 ?调研基于星敏感器+陀螺的姿态确定算法并撰写报告,要求不少于1500字。内容包括: ?星敏感器、陀螺数学模型 ?Landsat-D卫星姿态确定调研 包括:姿态敏感器组成、姿态敏感器性能、姿态确定算法及其精度 ?单星敏感器+陀螺的kalman滤波器姿态估计 ?双星敏感器姿态确定算法(双矢量定姿) ?列出主要参考文献 2.具体要求和相关参数 1)建立航天器姿态动力学方程以及基于欧拉角描述(3-1-2转序)的姿态运动学方程。基于如下假设,对航天器姿态动力学和姿态运动学模型进行简化: ?航天器的轨道为近圆轨道,对应轨道角速度为常数; ?航天器的本体坐标系与其主惯量坐标系重合,惯量积为零;
? 航天器姿态稳定控制时,姿态角和姿态角速度均为小量。 进一步建立适用于航天器姿态稳定或小姿态角度工况下的线性化航天器姿态动力学和运动学模型。 2) 航天器转动惯量矩阵 2200024142460018kg m 14182500????=??????? I 轨道角速度00.0012rad/s ω=。设航天器本体系三轴方向所受干扰力矩如下: 040003cos 1() 1.510 1.5sin 3cos N m 3sin 1d t t t t t ωωωω-+????=?+?????+??T 仿真中,假设初始三轴姿态角为002~5和初始三轴姿态角速度000.01/s ~0.05/s 。 3) 采用三正装反作用飞轮作为执行机构,飞轮最大控制力矩为0.4Nm ,最大角动量20Nms 。飞轮采用力矩模式,模型采用一阶惯性环节(时间常数为0.005s ),考虑库仑摩擦力矩4410Nm -?,要求飞轮的数学模型带有饱和特性。 4) 控制指标和性能指标: ? 稳定度(姿态角速度):优于0.005deg/s ; ? 指向精度(姿态角):优于0.1deg ; ? 姿态稳定收敛时间小于100s 。
四轴飞行器作品说明书
. . . 四轴飞行器 作品说明书
摘要 四轴飞行器在各个领域应用广泛。相比其他类型的飞行器,四轴飞行器硬件结构简单紧凑,而软件复杂。本文介绍四轴飞行器的一个实现方案,软件算法,包括加速度计校正、姿态计算和姿态控制三部分。校正加速度计采用最小二乘法。计算姿态采用姿态插值法、需要对比这三种方法然后选出一种来应用。控制姿态采用欧拉角控制或四元数控制。 关键词:四轴飞行器;姿态;控制
目录 1.引言 (1) 2.飞行器的构成 (1) 2.1.硬件构成 (1) 2.1.1.机械构成 (1) 2.1.2.电气构成 (3) 2.2.软件构成 (3) 2.2.1.上位机 (3) 2.2.2.下位机........... . (4) 3.飞行原理........... ................................ (4) 3.1. 坐标系统 (4) 3.2.姿态的表示 (5) 3.3.动力学原理 (5) 4.姿态测量........... ................................ (6) 4.1.传感器校正 (6) 4.1.1.加速度计和电子罗盘 (6) 5.姿态控制 (6) 5.1.欧拉角控制 (6) 5.2.四元数控制 (7) 6.姿态计算 (7) 7.总结 (8) 参考文献 (9)
1.引言 四轴飞行器最开始是由军方研发的一种新式飞行器。随着MEMS 传感器、单片机、电机和电池技术的发展和普及,四轴飞行器成为航模界的新锐力量。到今天,四轴飞行器已经应用到各个领域,如军事打击、公安追捕、灾害搜救、农林业调查、输电线巡查、广告宣传航拍、航模玩具等。 目前应用广泛的飞行器有:固定翼飞行器和单轴的直升机。与固定翼飞行器相比,四轴飞行器机动性好,动作灵活,可以垂直起飞降落和悬停,缺点是续航时间短得多、飞行速度不快;而与单轴直升机比,四轴飞行器的机械简单,无需尾桨抵消反力矩,成本低。 本文就小型电动四轴飞行器,介绍四轴飞行器的一种实现方案,讲解四轴飞行器的原理和用到的算法,并对几种姿态算法进行比较。 2.飞行器的构成 四轴飞行器的实现可以分为硬件和软件两部分。比起其他类型的飞行器,四轴飞行器的硬件比较简单,而把系统的复杂性转移到软件上,所以本文的主要容是软件的实现。 2.1.硬件构成 飞行器由机架、电机、螺旋桨和控制电路构成。 2.1.1.机械构成 机架呈十字状,是固定其他部件的平台,本项目采用的是碳纤维材料的机架。电机采用无刷直流电机,固定在机架的四个端点上,而螺旋桨固定在电机转子上,迎风面垂直向下。螺旋桨按旋转方向分正桨和反桨,从迎风面看逆时针转的为正桨,四个桨的中心连成的形,正桨反桨交错安装。 C AD设计机架如图:
飞行器姿态控制法综述
飞行器姿态控制方法综述 一.引言 经过一个世纪的发展,各种飞行器如雨后春笋般出现,从飞机、导弹到火箭、卫星,从宇宙飞船、航天飞机、空间站到月球探测器、火星探测器。这些飞行器能在空中按预定的轨迹运动总离不开它的姿态控制系统,飞行器在空间的运动是十分复杂的。为使问题简单化,总是将一飞行器的空间运动分解为铅锤平面的纵向运动和水平面内的侧向运动,将飞行器在空间的角运动分解成俯仰、偏航和滚动三个角运动。由于角运.动使飞行器的姿态发生变化,所以对角运动的控制就是对飞行器姿态的控制。对于飞行器姿态的控制,不同的飞行器需要不同的策略,本文主要就飞行器姿态控制方法的应用与发展作一一论述。 二.姿态控制的数学模型 要控制飞行器的姿态,就是要控制使飞行器三个姿态角发生变化的力矩大小。飞行器的姿态模型可以认为是一类不确定MIMO 仿射非线性系统,如式(1)所示: ()//()//()//(cos sin )/cos cos sin sin tan cos tan x y z y x x x x x z x x x y y y x x y x y z z z x x x z x y z I I I M I I I I M I I I I M I ωωωωωωωωωψωθωθ??ωθωθθωθ?ωωθ? =-+??=-+??=-+??=-??=+?=+-??&&&&&& (1) 式中,x 、y 、z 下标表示空间飞行器的三个主轴方向;I 表示相对于飞行器质心的惯量矩,设飞行器是主轴对称的,则惯量积可以忽略;ω表示飞行器相对于惯性空间的角速度;M 表示控制力矩;,,ψ?θ分别是飞行器的欧拉角。控制了M 的大小,就可以控制飞行器按我们期望的轨迹运动。M 由飞行器上的执行机构产生,常见的有空气舵、推力矢量发动机、反作用飞轮、喷气执行机构或由其它环境力执行机构。 三.飞行器姿态控制方法 3.1空气动力控制 根据运动的相对性原理和气体流动时的基本定律,当飞行器在大气中以一定