Current-Mode Modeling for Peak, Valley and Emulated Control Methods
CURRENT-MODE MODELING FOR PEAK, V ALLEY AND
EMULATED CONTROL METHODS
Reference Guide for Fixed-Frequency, Continuous Conduction-Mode Operation
Robert Sheehan
Principal Applications Engineer
National Semiconductor Corporation
Santa Clara, CA
Current-Mode Control
For current-mode control there are three things to consider:
1.Current-mode operation. An ideal current-mode converter is only dependent on the dc or
average inductor current. The inner current loop turns the inductor into a voltage-
controlled current source, effectively removing the inductor from the outer voltage
control loop at dc and low frequency.
2.Modulator gain. The modulator gain is dependent on the effective slope of the ramp
presented to the modulating comparator input. Each operating mode will have a unique characteristic equation for the modulator gain.
3.Slope compensation. The requirement for slope compensation is dependent on the
relationship of the average current to the value of current at the time when the sample is taken. For fixed-frequency operation, if the sampled current were equal to the average
current, there would be no requirement for slope compensation.
Current-Mode Operation
Whether the current-mode converter is peak, valley, average, or sample-and-hold is secondary to the operation of the current loop. As long as the dc current is sampled, current-mode operation is maintained. The current-loop gain splits the complex-conjugate pole of the output filter into two real poles, so that the characteristic of the output filter is set by the capacitor and load resistor. To understand how this works, voltage-mode operation is examined. The basic concept of pulse-width modulation is used to establish the criteria for the modulator gain. This allows a linear model to be developed, illustrating the dc- and ac-gain characteristics.
Having established the basic modulator concept, the current loop is added by sensing the inductor current, and feeding the sensed signal back to the modulator.
Modulator Gain
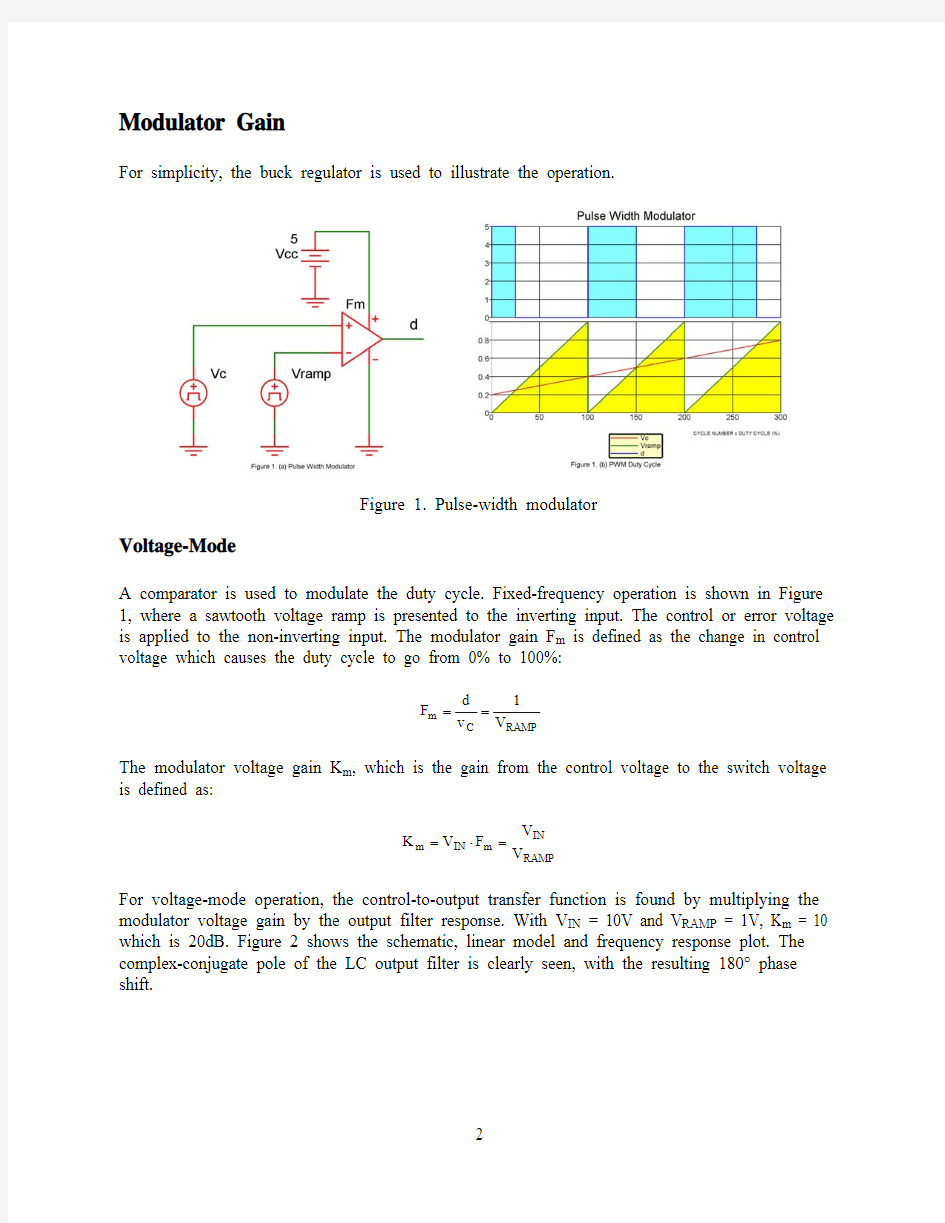
For simplicity, the buck regulator is used to illustrate the operation.
Figure 1. Pulse-width modulator
Voltage-Mode
A comparator is used to modulate the duty cycle. Fixed-frequency operation is shown in Figure 1, where a sawtooth voltage ramp is presented to the inverting input. The control or error voltage is applied to the non-inverting input. The modulator gain F m is defined as the change in control voltage which causes the duty cycle to go from 0% to 100%:
RAMP
C m V 1v d F =
=
The modulator voltage gain K m , which is the gain from the control voltage to the switch voltage is defined as:
RAMP
IN m IN m V V F V K =
?=
For voltage-mode operation, the control-to-output transfer function is found by multiplying the modulator voltage gain by the output filter response. With V IN = 10V and V RAMP = 1V, K m = 10 which is 20dB. Figure 2 shows the schematic, linear model and frequency response plot. The complex-conjugate pole of the LC output filter is clearly seen, with the resulting 180° phase shift.
Figure 2. (a) Voltage-mode buck, (b) Linear model, (c) Frequency response
Figure 3. (a) Current-mode buck, (b) Linear model, (c) Frequency response Current-Mode
The same PWM function occurs for current-mode control, except that the ramp is created by monitoring the inductor current. This signal is comprised of two parts: the ac ripple current, and the dc or average value of the inductor current. The output of the current-sense amplifier G i is summed with an external ramp V SLOPE, to produce V RAMP at the inverting input of the comparator.
In Figure 3 the effective V RAMP = 1V, which was used for the voltage-mode modulator. With V IN = 10V, the modulator voltage gain K m = 10.
The linear model for the current loop is an amplifier which feeds back the dc value of the inductor current, creating a voltage-controlled current source. This is what makes the inductor disappear at dc and low frequency. The ac ripple current sets the modulator gain.
The current-sense gain is usually expressed as the product of the current-sense amplifier gain and the sense resistor:
S i i R G R ?=
The current-sense gain is an equivalent resistance, the units of which are volts/amp. The current-loop gain is the product of the modulator voltage gain and the current-sense gain, which is also in volts/amp. The modulator voltage gain is reduced by the equivalent divider ratio of the load
resistor R O and the current-loop gain K m · R i . This sets the dc value of the control-to-output gain. Neglecting the dc loss of the sense resistor:
i
m O O
m C O R K R R K V V ?+?=
This is usually written in factored form:
i
m O
i
O
C O R K 11
R R V V ?+
?=
The dominant pole in the transfer function appears when the impedance of the output capacitor equals the parallel impedance of the load resistor and the current-loop gain:
???
??????+?=
i
m O O
P R K 1R
1C 1ω
The inductor pole appears when the impedance of the inductor equals the current-loop gain:
L
R K ωi
m L ?=
The current loop creates the effect of a lossless damping resistor, splitting the complex-conjugate pole of the output filter into two real poles.
For current-mode control, the ideal steady-state modulator gain may be modified depending
upon whether the external ramp is fixed, or proportional to some combination of input and output voltage. Further modification of the gain is realized when the input and output voltages are
perturbed to derive the effective small-signal terms. However, the concepts remain valid, despite small-signal modification of the ideal steady-state value.
Slope Compensation
The difference between the average inductor current and the dc value of the sampled inductor current can cause instability for certain operating conditions. This instability is known as sub-harmonic oscillation, which occurs when the inductor ripple current does not return to its initial value by the start of next switching cycle. Sub-harmonic oscillation is normally characterized by observing alternating wide and narrow pulses at the switch node. Adding an external ramp (slope compensation) to the current-sense signal prevents this oscillation.
Formal derivation of the criteria for slope compensation is covered in reference [1]. For the purpose of this analysis, a discussion of feed-forward techniques and some illustrations will suffice.
For the buck regulator, the modulator voltage gain K m was found to be V IN / V RAMP. For voltage-mode operation, the gain varies with V IN. Feed-forward techniques are often employed to stabilize the gain. This is typically done by generating V RAMP with a voltage-controlled current source or fixed resistor charging a capacitor from V IN.
Peak Current-Mode
Peak current-mode control is often referred to as having inherent line feed-forward. This is basically true, but is not quite ideal. The sensed inductor up-slope, which is used as V RAMP / T for the modulator is equal to (V IN - V O) · R i / L. In order to stabilize the gain, an external ramp of
V SLOPE / T = V O · R i / L must be added to the current-sense signal. The resultant V RAMP / T = V IN · R i / L.
Figure 4 shows the under-damped condition, where sub-harmonic oscillation occurs with a duty cycle greater than 50%. The relationship of Q as shown in the graphs is covered in the section on sampling gain. To demonstrate the under-damped condition, V SLOPE / T = 0.1 · V O · R i / L.
Figure 4. Peak current-mode sub-harmonic oscillation. For D<0.5, sub-harmonic oscillation is damped. For D>0.5, sub-harmonic oscillation builds with insufficient slope compensation.
By adding a compensating ramp equal to the down-slope of the inductor current, any tendency toward sub-harmonic oscillation is damped within one switching cycle. This is demonstrated graphically in Figure 5.
Figure 5. Optimally compensated peak current-mode buck.
For peak current-mode control, when the compensating ramp is equal to one-half the down-slope of the inductor current, infinite line rejection is achieved. Though a desirable operating point, this represents a special case. As the theoretical limit for stability of the current loop, the tendency toward sub-harmonic oscillation increases as the duty cycle approaches unity. To ensure stability of the current loop, the optimal compensating slope remains equal to one times the down-slope of the inductor current.
Valley Current-Mode
For valley current-mode, the down-slope of the inductor current is presented to the modulator, which is V O · R i / L. This transposes the function of the external ramp. It is now necessary to use slope compensation equal to the up-slope of the inductor current, so V SLOPE / T = (V IN - V O) · R i / L. Again, the resultant V RAMP / T = V IN · R i / L.
Figure 6 shows the under-damped condition, where sub-harmonic oscillation occurs with a duty cycle less than 50%. To demonstrate the under-damped condition, V SLOPE / T = 0.1 · (V IN - V O) · R i / L.
Figure 6. Valley current-mode sub-harmonic oscillation. For D>0.5, sub-harmonic oscillation is damped. For D<0.5, sub-harmonic oscillation builds with insufficient slope compensation.
Emulated Peak Current-Mode
For emulated peak current-mode, the valley current is sampled on the down-slope of the inductor current. This is used as the dc value of current to start the next cycle. A slope-compensating ramp is added to produce V RAMP at the modulator input.
The primary application for emulated peak current-mode is high input voltage to low output voltage operating at a narrow duty cycle. In any practical design, device capacitance and wiring inductance may cause a significant leading-edge spike on the current-sense waveform, followed by an extended period of ringing. By sampling the inductor current at the end of the switching cycle and adding an external ramp, the minimum on-time can be significantly reduced, without the need for blanking or filtering which is normally required for peak current-mode control.
To determine the correct slope compensation, the most salient feature is the absence of any ramp from the inductor, since only the dc value of the valley current is sampled. Formal derivation in reference [1] has shown the optimal compensation to be V SLOPE / T = V RAMP / T = V IN · R i / L. This is consistent with the results for both peak and valley buck regulators.
Figure 7 shows the under-damped condition, with V SLOPE / T = 0.55 · V IN · R i / L.
Figure 7. Emulated peak current-mode sub-harmonic oscillation. Tendency for sub-harmonic oscillation is independent of duty cycle. Even with minimal damping, it will eventually die out. Since the slope compensation requirement is independent of duty cycle, an interesting observation can be made. If the slope of the ramp is made less than 0.5 · V IN · R i / L, the circuit will exhibit sub-harmonic oscillation at any duty cycle.
General Slope Compensation Criteria
For any mode of operation (peak, valley or emulated), the optimal slope of the ramp presented to the modulating comparator input is equal to the sum of the absolute values of the inductor up-slope and down-slope scaled by the current-sense gain. This will cause any tendency toward sub-harmonic oscillation to damp in one switching cycle.
For the buck regulator, this is equivalent to a ramp whose slope is V IN · R i / L.
Up-slope = (V IN - V O) · R i / L
Down-slope = V O · R i / L
For the boost regulator, this is equivalent to a ramp whose slope is V O · R i / L.
Up-slope = V IN · R i / L
Down-slope = (V O - V IN) · R i / L
For the buck-boost regulator, this is equivalent to a ramp whose slope is (V IN + V O) · R i / L.
Up-slope = V IN · R i / L
Down-slope = V O · R i / L
To avoid confusion, V IN and V O represent the magnitude of the input and output voltages as a positive quantity. By identifying the appropriate sensed inductor slope, it is easy to find the correct slope-compensating ramp.
Sampling Gain
A current-mode switching regulator is a sampled-data system, the bandwidth of which is limited by the switching frequency. Beyond half the switching frequency, the response of the inductor current to a change in control voltage is not accurately reproduced. In order to quantify this effect for linear modeling, the continuous-time model of reference [2] successfully placed the sampling-gain term in the closed-current feedback loop. This allows accurate modeling of the control-to-output transfer function using the term H e (s).
In order to accurately model the current loop, the unified model of reference [3] placed the sampling-gain term in the forward path. For peak or valley current-mode with a fixed slope compensation ramp, this also accurately models the control-to-output transfer function using the term F m (s).
To develop the theory for emulated current-mode control, reference [1] used a fresh approach, deriving general gain parameters which are consistent with both models. In addition, a new representation of the sampling-gain term for the closed current-loop was developed, identifying limitations of the forward-path sampling-gain term.
Figure 8 (a) represents the unified form of the model, with K being the feed-forward term. In (b) K n is the dc audio susceptibility coefficient from the continuous-time model. The linear model sampling-gain terms as shown in Figure 2 are defined as:
n
p ωQ s 11)s (H ?
+=
2
n
2e ωs K s 1)s (H +
?+=
T
πωn =
K e is a new term which emerged from the derivation of the closed-loop expression for H(s). This derivation used slope-compensation terms other than the classic fixed ramp for peak or valley current-mode. K e could be expressed as
e
n Q ω1? but this seems rather pointless, as Q e would need
a value of infinity for K e = 0. To date, no method has been found which successfully incorporates K e into the open-loop expression for H p (s). Use of H p (s) is limited to peak or valley current-mode with a fixed slope-compensating ramp, for which the value of K e = 0.
To place either sampling-gain term into the linear models: F m (s) = F m · H p (s) G i (s) = G i · H(s)
The accuracy limit for the sampling-gain term is identified by comparing Q to the modulator voltage gain K m and the feed-forward term K. Q is directly related to the slope-compensation requirement. The derivation starts with the ideal steady-state modulator gain. The physical reason being that at the switching frequency, the relative slopes are fixed with respect to the
period T. A change in control voltage is then related to a change in average inductor current. Any transfer function which is solely dependent on K m in the forward dc-gain path will have excellent
agreement to the switching model up to half the switching frequency. Any transfer function which includes K in the forward dc-gain path will show some deviation at half the switching frequency.
Figure 8. Buck regulator with sampling-gain terms. (a) Sampling gain H P(s) in the forward path.
(b) Sampling gain H(s) in the closed current-loop feedback path. Simplified Transfer Functions
No assumptions for simplification were made during the derivation of the transfer functions. The only initial assumptions are the ones generally accepted to be valid for a first order analysis. Voltage sources, current sources and switches are ideal, with no delays in the control circuit. Amplifier inputs are high impedance, with no significant loading of the previous stage. Simplification of the results was made after the complete derivation, which included all terms. See the appendix for the complete derivation of all transfer functions.
In order to show the factored form, the simplified transfer functions assume poles which are well separated by the current-loop gain. Expressions for the low frequency model do not show the additional phase shift due to the sampling effect. The control-to-output transfer function with sampling-gain term accurately represents the circuit’s behavior to half the switching frequency. The line-to-output expressions for audio susceptibility are accurate at dc, but diverge from the actual response as frequency increases.
The current-sense gain R i = G i · R S , where G i is the current-sense amplifier and R S is the sense resistor.
To include the sampling-gain term in the control-to-output transfer function, replace L
ωs 1+
with
2
n 2
n ωs Q ωs 1+?+ in the low-frequency equations. This represents the closed current-loop sampling-
gain term. Inclusion of this term in the line-to-output equations will not produce the same accuracy of results. For peak or valley current-mode with a fixed slope-compensating ramp, . L n ωQ ω=?
Sampling Gain Q
Using a value of Q = 0.637 will cause any tendency toward sub-harmonic oscillation to damp in one switching cycle. With respect to the closed current-loop control-to-output function, the effective sampled-gain inductor pole is given by:
?????
???+???=
1Q 41Q T 41)Q (f 2L
This is the frequency at which a 45° phase shift occurs due to the sampling gain. For Q = 0.637, f L (Q) occurs at 24% of the switching frequency. For Q = 1, f L (Q) occurs at 31% of the switching frequency. For second-order systems, Q = 1 is normally associated with best transient response. Q = 0.5 (δ = 1) is the criteria for critical damping. Using Q = 1 may make an incremental
difference for the buck, but is inconsequential for the boost and buck-boost with the associated right-half-plane zero of ωR . For the peak current-mode buck with a fixed slope-compensating ramp, the effective sampled-gain inductor pole is only fixed in frequency with respect to changes in line voltage when Q = 0.637. Proportional slope-compensation methods will achieve this for other operating modes.
To determine the effect of reducing the slope compensation in order to increase the voltage-loop bandwidth, an emulated peak current-mode buck with proportional slope-compensation (EPCM2) switching circuit was implemented in SIMPLIS. A standard type II 10MHz error amplifier was used for frequency compensation. With T/L = 5μs/5μH and R i = 0.1V/A, the best performance was achieved with Q = 0.637 for a crossover frequency of 40 kHz and 45°phase margin. By setting Q = 1 a crossover frequency of 50 kHz was achieved, again with 45° phase margin but reduced gain margin. This appears to be the practical limit for a stable voltage loop, at the expense of under-damping the current loop. With Q = 1, sub-harmonic oscillation is quite pronounced during transient response, but damps at steady state.
Figure 9. Current-mode buck - evaluation of Q.
Simulation Programs
The choice of simulation program is important, since all SPICE programs do not calculate all parameters with the same degree of accuracy. For switching-model simulation, SIMPLIS is able to produce Bode plots directly from the switching model. This was used for the switching-model results.
The linear models were made with SIMetrix, which is the general purpose simulator for the SIMetrix/SIMPLIS program. This simulator only handles Laplace equations for s in numerical form, where the numerator order must be equal or less than the denominator order. PSpice is much better suited for linear models with Laplace functions in parameter form. It is more
accurate than the SIMetrix/SIMPLIS program, but cannot produce Bode plots directly from the switching model. PSpice or a program with similar capability may be used to obtain the linear-model results.
Linear Models
The linear models shown in Figures 22, 23 and 24 represent the state of the art in simplicity, accuracy and ease of use. Verification of each linear model has been made to results from the switching model. In this manner, validation for any transfer function is possible, identifying the accuracy limit of the linear model.
Transfer Functions in Impedance Form
For all transfer functions:
)R R (C s 1)
R C s 1(R R ||R C s 1Z C O O C O O O C O O +??+??+?=???
?????+?=
S L L R R L s Z ++?=
R O represents the load resistance, while R represents the dc operating point V O / I O .
For a resistive load R O = R.
For a non-linear load such as an LED, R O = R D , where R D represents the dynamic resistance of the load at the operating point, plus any series resistance.
For a constant-current load, R O = ∞.
G V represents the error amplifier gain as a positive quantity. To find the open-loop transfer functions, let G V = 0.
To include either sampling-gain term multiply K m by H P (s), or R i by H(s).
Buck Regulator Example
For the peak current-mode buck example, comparisons of results from the switching circuit of Figure 10 were made to the linear model of Figure 22 using the sampling-gain term H p(s). In order to use the forward-path sampling-gain term, slope compensation was implemented with a fixed ramp. The results will be slightly different if a proportional ramp is used, as this modifies the modulator gain term K m and feed-forward term K.
Figure 10. Buck switching model
Results for the control-to-output gain in Figure 11 show excellent agreement up to half the switching frequency. The line-to-output results in Figure 12 show some deviation due to the feed-forward term K being in the forward-gain path. Slope compensation was set for Q = 0.637. This can be seen from the current-loop crossover in Figure 13, which converges for all line voltages at 60 kHz or 30% of the switching frequency.
Figure 11. Buck control-to-output
Figure 12. Buck line-to-output
Figure 13. Buck current loop
Boost Regulator Example
For the peak current-mode boost example, comparisons of results from the switching circuit of Figure 14 were made to the linear model of Figure 23 using the sampling-gain term H p(s). In order to use the forward-path sampling-gain term, slope compensation was implemented with a fixed ramp. The results will be slightly different if a proportional ramp is used, as this modifies the modulator gain term K m and feed-forward term K. For an actual boost converter implementation with a fixed ramp, it is only possible to get the optimal Q at one input voltage.
Figure 14. Boost switching model
Results for the control-to-output gain in Figure 15 show a slight deviation at half the switching frequency. The line-to-output results in Figure 16 show excellent agreement up to half the switching frequency. Slope compensation was set for Q = 0.637. This can be seen from the current-loop crossover in Figure 17, which converges for all line voltages at 60 kHz or 30% of the switching frequency.
Figure 15. Boost control-to-output
Figure 16. Boost line-to-output
Figure 17. Boost current loop
Buck-Boost Regulator Example
For the peak current-mode buck-boost example, comparisons of results from the switching circuit of Figure 18 were made to the linear model of Figure 24 using the sampling-gain term
H p(s). In order to use the forward-path sampling-gain term, slope compensation was implemented with a fixed ramp. The results will be slightly different if a proportional ramp is used, as this modifies the modulator gain term K m and feed-forward term K.
Figure 18. Buck-boost switching model
Results for the control-to-output gain in Figure 19 show the same slight deviation as the boost at half the switching frequency. Similar to the buck, the line-to-output results in Figure 20 show a more pronounced deviation due to K being in the forward-gain path. Slope compensation was set for Q = 0.637. This can be seen from the current-loop crossover in Figure 21, which converges for all line voltages at 60 kHz or 30% of the switching frequency.
Figure 19. Buck-boost control-to-output
Figure 20. Buck-boost line-to-output
Figure 21. Buck-boost current loop
Current-Mode Buck
Figure 22. Buck linear model
Linear Model Coefficients
IN ap V V =IN
O V V D =
IN O
IN V V V D 1D ?=
?=′
D M =O
O
I V R =
R
M V I ap C ?=
ap
m m V K F =
Simplified Transfer Functions
Control-to-Output: Line-to-Output (0v ?C =): ???
????
?+????????
?++??=L P Z
D i O
C O ω
s 1ω
s
1ωs 1K R R v ?v ?
???
????
?+????????
?++
????=L P Z
D i n
O IN O ω
s 1ω
s
1ωs 1K R K D R v ?v ?
Where:
i
m O
D R K R 1K ?+
=
D
K K 1K m n ?=
C
O Z R C 1
ω?=
O
O D P R C K ω?=
L
R K ωi
m L ?=
人力资源相关网站
人力资源管理相关链接人力资源管理相关链接 中国人力资源管理在线https://www.360docs.net/doc/822539155.html,/ 中企人力资源管理网https://www.360docs.net/doc/822539155.html, https://www.360docs.net/doc/822539155.html,/ 人力资源在线https://www.360docs.net/doc/822539155.html, 北京外企人力资源协会https://www.360docs.net/doc/822539155.html,/cn/index.asp 韬略咨询https://www.360docs.net/doc/822539155.html,/mc/index.htm 赛迪咨询网https://www.360docs.net/doc/822539155.html, https://www.360docs.net/doc/822539155.html,/ 华夏人力资源https://www.360docs.net/doc/822539155.html, 东方经理网https://www.360docs.net/doc/822539155.html,/omm/index.htm 东方经理人网https://www.360docs.net/doc/822539155.html,/ 组织人事网https://www.360docs.net/doc/822539155.html,/ 中南财经政法大学人力资源管理99级https://www.360docs.net/doc/822539155.html,/ 南京必得人才资源顾问有限公司https://www.360docs.net/doc/822539155.html, 中华英才网https://www.360docs.net/doc/822539155.html, 中华人才信息网https://www.360docs.net/doc/822539155.html,/ 和悦人才https://www.360docs.net/doc/822539155.html,/main/index.asp 同济大学人力资源工作室https://www.360docs.net/doc/822539155.html,/ 佐佑人力资源顾问公司https://www.360docs.net/doc/822539155.html,/chinese/link.htm 北京福林京峰经济合作咨询中心https://www.360docs.net/doc/822539155.html,/navigator_c.htm 深圳市硕旺信息技术开发有限公司(HR软件) https://www.360docs.net/doc/822539155.html,/ 深圳市新全息企业管理咨询有限公司https://www.360docs.net/doc/822539155.html,/index2.html 深圳市极通电脑软件有限公司https://www.360docs.net/doc/822539155.html,/ 万康国际管理顾问公司https://www.360docs.net/doc/822539155.html,/index.htm 佳扬管理咨询有限公司https://www.360docs.net/doc/822539155.html,/ 上海英桥电子商务有限公司(软件)https://www.360docs.net/doc/822539155.html,/ 南京利物浦企业管理顾问有限公司https://www.360docs.net/doc/822539155.html,/aus.htm 厦门摩西管理咨询有限公司https://www.360docs.net/doc/822539155.html,/ 广州狄安人力资源顾问有限公司https://www.360docs.net/doc/822539155.html,/ 北京三普利管理顾问有限公司https://www.360docs.net/doc/822539155.html,/ 捷聘网https://www.360docs.net/doc/822539155.html,/hr/hr_index.asp 普华四方商务策划工作室https://www.360docs.net/doc/822539155.html,/bbs/index.asp 中国人力资源网https://www.360docs.net/doc/822539155.html, 中国易聘网https://www.360docs.net/doc/822539155.html,/ 博惠思华人力资源管理软件网站job365——天天工作网https://www.360docs.net/doc/822539155.html, 致恒管理顾问工作室https://www.360docs.net/doc/822539155.html,/ 富锐咨询https://www.360docs.net/doc/822539155.html,/ 登龙门人力资源网络https://www.360docs.net/doc/822539155.html,/ 狄安https://www.360docs.net/doc/822539155.html, 中国海峡人才网https://www.360docs.net/doc/822539155.html,/new/rcyth/main.htm 中国人才热线https://www.360docs.net/doc/822539155.html,/company/ 西三角人力资源网https://www.360docs.net/doc/822539155.html,/ 中国经理人网https://www.360docs.net/doc/822539155.html,/ 北京仁达方略企业管理咨询有限公司https://www.360docs.net/doc/822539155.html, 金方策企业管理咨询有限公司https://www.360docs.net/doc/822539155.html,/
人力资源商业计划书
人力资源商业计划书 篇一:人力资源创业计划书 一.项目描述 1.项目背景 十七大报告中指出:坚持节约资源和保护环境的基本国策,关系到人们群众切身利益和中华民族的生存发展。新中国成立,尤其是改革开放以来,我国经济社会的发展取得了举世瞩目的成就,但是,在资源和环境方面却付出了巨大的代价。我国经济社会的发展已经进入新的历史阶段,建设“资源节约型,环境友好型”社会迫在眉睫。切实保护和合理利用各种资源,提高资源的利用率,这关系到我国经济社会的发展和中华民族的兴衰成败,具有全局性和战略性的重大决策。而这其中人力资源尤为重要。 全国上下有XX多所高校,所有学校中大部分在校生平时课余时间都得不到充分的利用,更有甚者沉迷于网络游戏,流连于歌厅酒吧等不利于大学生发展的场所,因此我们结合大学生当前现状与现今社会的实际需求,而制定出一套利用在校大学生人力资源的创业方案。—— 2.项目介绍 1)、博文资源再利用有限公司的功能模型
高校人力资源系统 **社会外包企业系统 具体实施操作系统 (2)、机构详解 A、项目确定: B、项目策划: C、项目操作: D、项目服务: 3.项目宗旨 二.行业与市场分析 1. 旧书业的发展现状 易市场潜力巨大,也为双方提供了一个互利的良好平台。 2、供求断层缺乏监管旧书回收亟待规范 3.市场介绍 据统计,XX年仅武汉在校大学生人数就达104万,若以每位学生每学年仅购买150元的新教材,而这些学生若买旧
教材的话(旧教材的价格是新教材原价基础上三到四折),以四折计则每位学生每年可以节约的教材费为90元,而104万学生呢,每年总共是9360万,这个数字是多么的惊人啊,要是算到全国,那这个数据将无法想象。可想而知,旧书回收循环利用的市场潜力无比巨大。 4.目标客户群 全国各个高校学生及社会企业 5.竞争对手分析 旧书回收的对手主要有两个:一是同行业;二是中介公司。 新书商不会与本项目成为对手,因为同样一本书在都不影响阅读的情况下旧书占据价格上的绝对优势。而对于同行业,只能是优胜劣汰,所以要不断的提高服务质量和信誉、产品质量,以最好的产品最低的价格最多的种类来赢得更多的顾客的信任。对于盗版书商,我们的优势在于书的质量绝对过硬,价格上的绝对实惠,服务的周到与保障体系。 6.未来10年旧书市场销售预测 我国虽然成为了世界第二大经济体,但是由于人口基数大,所以我国的书本教材不会在短期内由电子书等替代,反而会因为时间的推移、政策的改变使教材的改版频率降低
汽车理论第一章汽车的动力性及绪论课后答案详细解答
第一章 1.1、试说明轮胎滚动阻力的定义、产生机理和作用形式? 答:1)定义:汽车在水平道路上等速行驶时受到的道路在行驶方向 上的分力称为滚动阻力。 2)产生机理:由于轮胎内部摩擦产生弹性轮胎在硬支撑路面上 行驶时加载变形曲线和卸载变形曲线不重合会有能量损失,即弹 性物质的迟滞损失。这种迟滞损失表现为一种阻力偶。 当车轮不滚动时,地面对车轮的法向反作用力的分布是前后对 称的;当车轮滚动时,由于弹性迟滞现象,处于压缩过程的前部 点的地面法向反作用力就会大于处于压缩过程的后部点的地面法 向反作用力,这样,地面法向反作用力的分布前后不对称,而使 他们的合力Fa 相对于法线前移一个距离a, 它随弹性迟滞损失的 增大而变大。即滚动时有滚动阻力偶矩 a F T z f = 阻碍车轮滚 动。 3)作用形式:滚动阻力 fw F f = r T F f f = (f 为滚动 阻力系数) 1.2、滚动阻力系数与哪些因素有关? 提示:滚动阻力系数与路面种类、行驶车速以及轮胎的构造、材料、气压等有关。 1.3、确定一轻型货车的动力性能(货车可装用4档或5档变速器, 任选其中的一种进行整车性能计算): 1)绘制汽车驱动力与行驶阻力平衡图。
2)求汽车的最高车速、最大爬坡度及克服该坡度时相应的附着率。 3)绘制汽车行驶加速倒数曲线,用图解积分法求汽车有Ⅱ档起步加速行驶至70km/h 的车速-时间曲线,或者用计算机求汽车用Ⅱ档起步加速至70km/h 的加速时间。 轻型货车的有关数据: 汽油发动机使用外特性的Tq —n 曲线的拟合公式为 432)1000 (8445.3)1000(874.40)1000(44.165)1000(27.25913.19n n n n Tq -+-+-= 式中, Tq 为发功机转矩(N ·m);n 为发动机转速(r /min)。 发动机的最低转速n min =600r/min ,最高转速n max =4000 r /min 装载质量 2000kg 整车整备质量 1800kg 总质量 3880 kg 车轮半径 0.367 m 传动系机械效率 ηт=0.85 波动阻力系数 f =0.013 空气阻力系数×迎风面积 C D A =2.772m 主减速器传动比 i 0=5.83 飞轮转功惯量 I f =0.218kg ·2m 二前轮转动惯量 I w1=1.798kg ·2m 四后轮转功惯量 I w2=3.598kg ·2m 变速器传动比 i g (数据如下表)
中国人力资源咨询业分析
资料范本 本资料为word版本,可以直接编辑和打印,感谢您的下载 中国人力资源咨询业分析 地点:__________________ 时间:__________________ 说明:本资料适用于约定双方经过谈判,协商而共同承认,共同遵守的责任与义务,仅供参考,文档可直接下载或修改,不需要的部分可直接删除,使用时请详细阅读内容
中国人力资源咨询业分析 人力资源管理咨询正逐步成为企业管理的一大热点,从事人力资源管理咨询的公司也如雨后春笋般争相创立。本人曾先后任职于数家人力资源咨询顾问公司,对这一行业的发展比较有体会,因此不揣冒昧提点自己粗浅的看法,供业界同仁商榷探讨。 咨询机构类型分析 学院型:这类咨询机构主要由国内某所院校人力资源类专家教授牵头,从事独立咨询或成立一个咨询机构为企业提供服务。在一些大专院校,导师带着自己的研究生为企业设计管理方案是比较常见的现象。有些老师因咨询业务量比较大,创办一个咨询公司进行业务运作,具体咨询活动则由自己亲自出马。 实干型:这类咨询机构主要由国内某些在人力资源领域有多年实际操作和管理经验的从业人员创立。他们背后往往会有一些大学专家、教授的背影,但大都是借用他们的名气,以便于开拓市场或咨询活动的顺利开展。 寄生型:这类咨询机构的前身主要从事培训、管理体系认证等,由于看重人力资源领域的发展,或者说为了壮大自己的声势,于是也对外声称自己能为客户提供人力资源管理咨询。 整合型:这类咨询机构一般具有相当的实力,或者说核心人物是国内具有一定影响和知名度的专家、学者、业界精英。他们将人力资源整合进企业管理体系,为企业提供战略规划、流程优化、人力资源、市场营销、资本运作、财务管理等全方位的管理咨询。 独立型:由于市场容量较大,目前还存在着很多游离于组织之外的独立咨询人士,他们借助个人的名气或社会关系,偶尔也能签订几个咨询项目。当项目正式运做起来后,再利用朋友或其他咨询机构的力量共同操作。部分学院型专家教授也采取这种方式,但为了区别清楚,还是将他们划归学院型。 咨询业存在问题分析 分析这几年中国人力资源咨询业的发展,我觉得主要存在几个方面的问题,试述如下:
大数据解决公司人力资源管理现存的问题
一、大数据解决公司人力资源管理现存问题 当前全社会多领域正在经受着大数据浪潮的洗礼,人力资源管理领域也不能例外。商业智能工具帮助人力资源管理从凭借经验的模式逐步向依靠事实数据的模式转型;人力测评由主观性强的单一专家进行测评转向构建数学模型依靠大数据处理技术进行测评;企业招聘过程也正朝着越来越依靠社交网络和大数据技术的方向发展。 (一)大数据助力HR-BI Human Resource Business Intelligence,以下简称HR-BI,即人力资源商业智能,主要解决通过数据对整个人力资源过程监控,对人力资源管理监控分析。它是商业智能在人力资源管理决策分析过程中有效应用的结果,是通过建立一套基于企业人力资源管理过程的分析模型,利用商业智能分析统计功能强大和展现形式丰富的特点,实现支持企业人力资源管理决策分析的分析系统。例如:随着某公司“软实力”的提升,对人力资源管理理念与管理能力提出了更高的要求,人力资源决策迫切需要从“经验+感觉”模式向“事实+数据”模式转型,这时候就是HR-BI派上用场的时候了。
区别于e-HR,即面向业务过程的一般性报表的电子人力资源管理,HR-BI的价值在于通过其多维数据仓库功能,进行数据建模,提高大数据情况下的人力资源分析效率,使得人力资源管理体系能够找到不断调整与优化的方向与策略,更好的支持业务发展,真正适应企业整体发展战略的需要。 业界的佐佑人力资源管理咨询顾问公司和企业应用软件巨头Aptean公司就分别从“数据“、“信息”和“洞察力”以及预算管理和薪资等方面提供了足够好足够多的案例。 (二)大数据助力人才测评 随着人力资源管理日益成为企业生存关键的时候,人才测评作为人力资源管理的一项专门技术也越来越受到人们的重视。 通过对目前国内外人才测评状况的了解得知,现在企业的人才测评大多处在单一的专家评估上面,明显带有强烈的主观性。为此,利用大数据技术对人才测评中的一些问题如人才绩效考核、人才选拔以及分类进行研究,改进以前算法中的一些不成熟的地方。大数据技术能从一些大型的人力资源数据库中找到隐藏在其中
汽车理论第五版习题集(附答案).
汽车理论第五版习题集 一、填空题 1. 汽车动力性评价指标是: 汽车的最高时速 ﹑ 汽车的加速时间 和 汽车的最大爬坡速度 。 2. 传动系功率损失可分为 机械损失 和 液力损失 两大类。 3. 汽车的行驶阻力主要有 滚动阻力 、 空气阻力 、 坡度阻力 和 加速阻力 _。 4. 汽车的空气阻力分为 压力阻力 和 摩擦阻力 两种。 5. 汽车所受的压力阻力分为 形状阻力 ﹑ 干扰阻力 ﹑ 内循环阻力 和 诱导阻力 。 6. 轿车以较高速度匀速行驶时,其行驶阻力主要是由_ 空气阻力 _引起,而_ 滚动阻力 相对来说较小。 7. 常用 原地起步加速时间 加速时间和 超车加速时间 加速时间来表明汽车的加速能力。 8. 车轮半径可分为 自由半径 、 静力半径 和 滚动半径 。 9. 汽车的最大爬坡度是指 I 档的最大爬坡度。 10.汽车的行驶方程式是_ j i w f t F F F F F +++= 。 11.汽车旋转质量换算系数δ主要与 飞轮的转动惯量 、__ 车轮的转动惯量 以及传动系统的转动比有关。 12.汽车的质量分为平移质量和 旋转 质量两部分。 13.汽车重力沿坡道的分力成为 汽车坡度阻力 _。 14.汽车轮静止时,车轮中心至轮胎与道路接触面之间的距离称为 静力半径 。 15.车轮处于无载时的半径称为 自由半径 。 16.汽车加速行驶时,需要克服本身质量加速运动的惯性力,该力称为 加速阻力 。 17.坡度阻力与滚动阻力均与道路有关,故把两种阻力和在一起称为 道路阻力 。 18.地面对轮胎切向反作用力的极限值称为 附着力 。 19.发动机功率克服常见阻力功率后的剩余功率称为 汽车的后备功率 。 20.汽车后备功率越大,汽车的动力性越 好 。 21.汽车在水平道路上等速行驶时须克服来自地面的__ 滚动_阻力和来自空气的_ 空气 _阻力。
汽车理论第一章 动力性
汽车理论复习题 汽车动力性 1.什么是汽车的动力性,其评价指标是什么? 2.什么是汽车的驱动力,它与汽车的结构参数及发动机的性能有何关系? 3.汽车的车速如何计算?它与发动机转速及传动系参数的关系? 4.何为发动机的外特性与使用外特性?两者有何差别?计算汽车动力性时应使用何种发动机特性? 5.车轮的自由半径、滚动半径、静力半径及动力半径的含义及使用场合? 6.何为汽车的驱动力图?当已知发动机使用外特性及汽车响应结构参数时,如何做汽车的驱动力图? 7.汽车的滚动阻力有哪几项构成? 8.试解释轮胎滚动阻力产生的机理、作用的形式及计算。 9.简述滚动阻力系数的影响因素。 10.简述空气阻力的定义、计算方法以及减少空气阻力系数的措施。 11.分别说明传动系两种功率损失(机械损失和液力损失)的具体表现形式。 12.试述弹性物质的迟滞现象。 13.何为汽车的加速阻力?说明汽车旋转质量换算系数的含义。 14.汽车行驶方程式及其物理含义? 15.汽车行驶的附着条件、驱动条件指什么?改变何种因素可以提高汽车的附着力?16.何为汽车的附着力和附着系数? 17.如何作汽车的驱动力---行驶阻力平衡图?利用驱动力---行驶阻力平衡图分析汽车的动力性? 18.何为汽车的动力因数及其表达式?如何求作汽车的动力特性图并利用其分析汽车的动力性? 19.何为汽车的功率平衡方程式和功率平衡图? 20.简述后备功率的概念及其意义。利用后备功率分析汽车动力性。后备功率对汽车燃油经济性的影响原因?
21.一轿车P emax = 90KW,n P= 5600 r/min, T tqmax = 167 Nm, n tq = 4000r/min, i =3.9, C D A=1.2m2,m =3500Kg,η T =0.90,r = 0.30m , f = 0.01,试确定该车以直接档行驶 时,发动机发出最大功率的情况下能达到的车速是多少?该档的最大动力因数D max 是多少? 22.已知某汽车的总质量m=5000kg,C D =0.85,A=4.2m2,旋转质量换算系数δ=1.04,坡度角α=3°,f=0.012, 车轮半径r r=0.367m,传动系机械效率ηT=0.90,加速度 dV/dt=0.25m/s2, u a =25km/h,此时克服各种阻力功率需要的发动机输出功率是多少?23.一货车为后轴驱动,其总质量为2800kg,前轴负荷为65%,后轴负荷为35%,四挡变 速器的传动比分别为:6.09, 3.09, 1.71, 1.00,旋转质量换算系数均计为1.13,且主 传动比为6.01,传动效率为0.85,滚动阻力系数为0.02,质心高度为0.68m,C D A为2.3m2,轴距为2.8m,车轮半径为0.38m,发动机最大扭矩为80Nm。空气升力不计。试计算: a) 当在平直的路面上以匀速180km/h行驶时所需要的路面附着系数。 b) 在?=0.35的路面上能否达到最大的爬坡度,如不能该怎样改变汽车的结构参数使其达到最佳的爬坡能力。 24.某型汽车为前轴驱动,其总质量为2200kg,前轴负荷为62%,后轴负荷为38%,四挡变速器的传动比分别为:6.09, 3.09, 1.71, 1.00,旋转质量换算系数均计为1.23,且 主传动比为5.8,传动效率为0.88,滚动阻力系数为0.02,质心高度为0.63m,C D A为1.9m2,轴距为2.6m,车轮半径为0.38m,发动机最大扭矩为140Nm。空气升力不计。试计算 a) 在?=0.6的路面上,在直接挡时此车的最大动力因数。 b) 在?=0.5的路面上,此车的最大爬坡度。 25.为什么要使用无级变速器?
汽车理论
第1-3章 1、汽车的动力性系指汽车在良好路面上直线行驶时由汽车受到 的纵向外力决定的,所能达到的平均行驶速度。 2、汽车的动力性主要可由三方面的指标来评定,即:汽车的最高 车速u amax,单位为km/h;汽车的加速时间t,单位为s;汽车 能爬上的最大坡度i max 3、最高车速是指汽车在良好的水平路面上能达到的最大行驶速 度。 4、加速时间分为原地起步加速时间和超车加速时间。①原地起步 加速时间指汽车由第I档或第II档起步,并以最大的加速强度(包括选择恰当的换档时机)逐步换至最高档后到某一预定的距离或车速所需的时间。②超车加速时间指用最高档或次高档由某一较低车速全力加速至某一高速所需的时间。 5、汽车的上坡能力是用满载时汽车在良好路面上的最大爬坡度 i max表示的。一般i max在30%即16.5 °左右 6、F t=∑F=F f+F i+F w+F i F t——驱动力;∑F——行驶阻力之和 若令T tq表示发动机转矩,i g表示变速器的传动化,i o表示主减速器的传动比,ηT表示传动系的机械效率,则有Tt=T tq i g i oηT 7、如将发动机的功率P e、转矩T tq以及燃油消耗率b与发动机曲轴转速之间的函数关系以曲线表示,则此曲线称为发动机转速特性曲线或简称发动机特性曲线。如果发动机节气门全开(或高压油泵在最大供油量位置),则此特性曲线称为发动机外特性曲线;如果节气门部分开启(或部分供油),则称为发动机部分负荷特性曲线。8传动系的功率损失可分为机械损失和液力损失 9、图1-7数据表明,直接挡的传动效率比超速挡的高,因为直接挡没有经啮合齿轮传递转矩;同一挡位转矩增加时,润滑油损失所占的比例减少,传动效率较高;转速低时搅油损失小,传动效率比转速高时要高。 10、汽车传动系机械效率轿车ηT=0.90~0.92商用车ηT=0.82~0.85越野车ηT=0.80~0.85 11、车轮处于无载时的半径称为自由半径汽车静止时,车轮中心至轮胎与道路接触面间的距离称为静力半径r s。由于径向载荷的作用,轮胎发生显着变形,所以静力半径小于自由半径。 12、行驶的总阻力∑F=F f+F w+F i+F j 13、行驶车速对滚动阻力影响:车速达到某仪临界车速左右时,滚动阻力迅速增大,轮胎发生助波现象,轮胎周缘不再是圆形而是明显的波浪形,出现助波后,不但滚动阻力显着增加,轮胎温度也很快加到100摄氏度以上,胎面与轮胎布帘脱落,几分钟内就会出现爆破现象,这对高速行驶的汽车是一件危险的事情。 14:气压降低轮胎阻力增大原因:气压降低,滚动的轮胎变形大,迟滞损失增加。 15:子午线轮胎滚动阻力系数低 16、汽车直线行驶时受到的空气作用力在行驶方向上的分力称为空气阻力。空气阻力分为压力阻力与摩擦阻力两部分。压力阻力又分为四部分:形状阻力、干扰阻力、内循环阻力和诱导阻力。 17、当汽车上坡行驶时,汽车重力沿坡道的分力表现为汽车坡度阻力,道路阻力是坡度阻力与滚动阻力之和。 18、系数δ作为计入旋转质量惯性力偶矩后的汽车质量换算系数,δ主要与飞轮的转动惯量、车轮的转动惯量以及传动系的传动比有关。 19、汽车的行驶方程式为:Ft=Ff+Fw+Fi+Fj 20、汽车行驶的驱动条件Ft≥Ff+Fw+Fi 21、汽车行驶的驱动-附着条件:Ff+Fw+Fi≤Ft≤F Zφ· 22、汽车运动阻力所消耗的功率有滚动阻力功率P f、空气阻力功率P w、坡度阻力功率P i及加速阻力功率P j。 23、为汽车的后备功率。 24、汽车的燃油经济性在保证动力性的条件下,汽车以尽量少的燃油消耗量经济行驶的能力 25、汽车的燃油经济性衡量方法:常用一定运动工况下汽车行驶百公里的燃油消耗量或一定燃油量能使汽车行驶的里程来衡量。 26、单位时间内燃油消耗量,b燃油消耗率,单位为g/(kW·h)y燃油的重度 27、发动机的燃油消耗率取决于:一方面取决于发动机的种类、设计制造水平;另一方面又与汽车行驶时发动机的负荷率有关。即使用方面:1行驶车速2档位选择3挂车的应用,结构方面:1缩减轿车总尺寸和减轻质量2发动机3传动系 (1)由百公里燃油消耗量曲线知:汽车在接近于低速的中等车速时燃油消耗量最低,高速时随车速增加而迅速增加。这是因为在高速行驶时,虽然发动机的负荷率较高,但汽车的行驶阻力增加很大而导致百公里油耗增加的缘故。 (2)档位选择:在同一道路条件与车速下,虽然发动机发出的功率相同,但档位愈低,后备功率愈大,发动机的负荷率愈低,燃油消耗率愈高,百公里燃油消耗量就愈大,而使用高档时的情况则相反。(3)挂车的应用:拖带挂车后节省燃油的原因有二个:一是带挂车后阻力增加,发动机的负荷率增加,使燃油消耗率b下降;另一个原因是汽车列车的质量利用系数(即装载质量与整车整备质量之比)较大。 28、提高发动机燃油经济性的主要途径为:(1)提高现有汽油发动机的热效率与机械效率(2)扩大柴油发动机的应用范围;(3)增压化;(4)电子计算机控制技术的广泛采用。 29、汽车动力装置参数系指发动机的功率、传动系的传动比。它们对汽车的动力性与燃油经济性有很大影响。 30、汽车比功率是单位汽车总质量具有的发动机功率,比功率的常用单位为KW/t 31、在选定最小传动比时,要考虑到最高档行使时汽车应有足够的动力性能,即应有足够的最高档动力因数D0max。最小传动比还受到驾驶性能的限制。驾驶性能是包括驾驶平稳性在内的加速性,系指动力装置的转矩响应、噪声和振动。 32确定最大传动比要考虑三方面的问题:最大爬坡度或I档最大动力因数D1max,附着力以及汽车最低稳定车速。 33、档位数多的好处:就动力性而言,档位数多,增加了发动机发 () w f T e P P P+ - η 1
我国管理咨询业的发展历史与前景及现状
我国管理咨询业的发展历史与前景及现状 管理咨询业是以自己的知识和智慧,帮助企业、事业成功、推动社会文明的建设发展,咨询企业的生命在市场,咨询企业的成功就在于帮助别人出主意获得成功;帮助别人成功的业绩就越多,咨询公司自身的社会信誉就越高,在市场上占有的份额也会越大。我国管理咨询业的发展历史与前景我国的管理咨询业是借鉴日本和欧美国家企业管理咨询的理论、方法和经验发展起来的。随着我国改革开放进程的发展,80 年代初,我国咨询业应运而生。综观我国咨询业近二十年的发展历程,主要可以划分为以下几个阶段:1)八十年代的官办管理咨询业我国咨询业的发展首先起源于政府创办管理咨询业,主要集中在投资、科技和财务咨询领域。为了有效地调整国家产业结构,解决瓶颈产业和建立合理的价格体系,原国家计划委员会系统在全国创立了“投资咨询”和建设“工程咨询”公司,以期实现国家投资决策的科学化和工程建设的合理化;为了推动科技成果转化,原国家科委和中国科协系统在全国创办和扶持了一批“科技咨询”企业;为推动企业财务会计咨询的社会化,会计、审计、评估工作的社会中介化,国家财政系统在各地创立了“财务会计咨询”公司和“会计师事务所”。2)九十年代前半期的信息管理咨询业八十年代出现的信息咨询业是非规范和非市场化的,但其出现让人们也领悟到了信息的价值。随着九十年代,我国经济开始向市场化方向发展,一批外资和国内私营“信息咨询” 公司和“市场调查”公司开始在市场经济进程中涌现,并为企业提供规范化咨询服务。早期对信息咨询业的需求主要来自外资企业和部分合资企业。经过五年左右时间的发展,一部分按市场规律运作的信息咨询公司脱颖而出,如“零点调查”、“盖洛普(中国)咨询”、“华南国际市场研究”、“慧聪信息”、“浩辰商务”等。这些信息咨询与市场调查公司以其高质量的专业化服务赢得市场,并在竞争中站稳了脚跟。3)九十年代后半期的管理咨询业九十年代初期,我国信息咨询业开始进入起步发展阶段,但管理咨询业仍处在初级发展阶段。最典型的就是早期的“点子公司”、“策划公司”。大概是1992 年北京的何阳一个“点子” 卖了40 万元,被媒体炒得沸沸扬扬,加之紧随其后的“点子公司”和几本宣传“点子”的畅销书,让咨询的名头着实火了一阵。但把管理咨询业与流星般坠落的“点子公司”联在一起,这是误解。一个没有文化的人也可能冒出几个“点子”,管理咨询却是典型的知识产业。时至九十年代中期,随着我国市场经济的日趋完善,市场竞争日趋激烈,国外管理咨询公司大批进入我国市场,我国的管理咨询业才开始起步发展。从此管理咨询业告别“点子” 时代,进入专业化发展阶段。到九十年代末,一部分国内管理公司开始在市场上崭露头角,如“汉普管理咨询”、“远卓战略”、“博峰营销”、“派力营销”、“博通经纬”等。北大学院黄东涛先生曾说过,“2000 年中国管理咨询行业的有效需求总额约1 亿美元,美国达到1,600 亿美元。在未来的10 年中,中国管理咨询行业需求将以10 倍的速度增加,到2010 年中国管理咨询行业的有效需求总额将达到100 亿美元。” 1 依据中国企业联合会《中国企业发展报告(2001)》的调查数据来分析这个市场:到2000 年末,我国国有工业企业约800 万个,如果按1/3 国有企业需要管理咨询来计算,我国就有240 万个国有企业需要管理咨询;我国民营企业大约有300 万家,按20%的民营企业需要管理咨询服务,就会有60 万个民营企业加入到管理咨询需求行列中,全部加起来300 多万个企业。如果按每个企业平均10,000 元的管理咨询需求算,全国就有300 亿元的管理咨询投入。偌大的市场,目前已经吸引了数家外国管理咨询公司进驻我国,抢占管理业滩头阵地。2001 年12 月11 日,中国正式加入WTO。著名的跨国公司将纷纷强占中国这块宝贵的市场,企业与企业之间的竞争将是国际范围的。企业日益面临着严重的挑战,在融入全球一体化的同时,还必须妥善处理过去计划经济遗留下来的企业管理不适应国内外两个市场竞争环境的后遗症。随着竞争加剧,中国企业必然会加速成长,众多企业现在已经开始认识到自身必须首先具备良好的管理基础,一批企业也开始了对最佳管理实践的追求。参照国际企业的发展趋势以及企业环境的不断变化,企业将会进
汽车理论动力性,燃油经济性计算
期中试题动力性燃油经济性计算
整车参数表 变速器速比
拟合公式系数 1、绘制功率平衡图: 根据公式0 377 .0i i rn u g a =,将各参数代入公式得发动机转速对应的车速; 根据负荷特性曲线的拟合公式可以得到转矩; 根据公式9550 n T P q t e =,计算功率;
1档数值: MATLAB程序: 车速: n=[0 815 1207 1614 2012 2603 3006 3403 3804 4200]; y=0.00437306*n 转矩: p=[-3.8445 40.875 -165.441 295.28 -19.313]; >> n=[0 0.815 1.207 1.614 2.012 2.603 3.006 3.403 3.804 4.200]; >> T=polyval(p,n) 功率:
p=[-3.8445*10^-12 40.875*10^-9 -0.000165441 0.29528 -19.313 0]; n=[0 815 1207 1614 2012 2603 3006 3403 3804 4200]; P=polyval(p,n)/9550 一档的功率特性图: a=[0 3.5640 5.2783 7.0581 8.7986 11.3831 13.1454 14.8815 16.6351 18.3669]; b=[0 11.2548 20.1946 29.0798 36.8651 47.0855 53.4233 58.7553 61.7021 59.1691]; values = spcrv([[a(1) a a(end)];[b(1) b b(end)]],3); plot(values(1,:),values(2,:), 'g'); 2档数值:
邮政公司中层领导干部公开选拔和竞聘上岗方案精品文档12页
邮政公司中层领导干部公开选拔和竞聘上岗方案 根据企业改革和发展的需要,为进一步加强企业中高层次管理干部队伍建设,经省公司党组研究决定,对省公司中层管理干部空缺岗位进行公开选拔和竞聘上岗。现将有关事项通知如下: 一、指导思想和工作思路 (一)指导思想 以科学发展观为指导,积极推进省公司人事制度改革,坚持党管干部、任人唯贤、德才兼备和群众公认、注重实绩的原则,坚持公开、公平、竞争、择优的原则。创新领导干部选拔任用机制,形成富有生机与活力的选人用人机制,为各类人才提供展现才华平台,使优秀人才脱颖而出。进一步提高领导干部队伍的整体素质,建设一支素质优秀、结构优化、作风正派、精干高效的领导干部队伍,为湖南邮政和谐、全面、可持续发展提供强有力的组织保证。 (二)工作思路 改革干部选拔模式,采取公开选拔和公开竞聘的方式,做到选拔竞聘公平、公正、客观;引进第三方专业机构,创新评估方式与方法,帮助公司全面系统地评价参与竞聘的各类人才;按照“德”、“才”、“绩”、“信”四个方面涵盖的具体标准对参与者进行全面的衡量和测评;按照综合笔试、巡回考察、集中考察、竞聘决策等环节,分阶段、按步骤、有组织的开展选拔竞聘工作,实现“人才露锋芒,公司选贤才,氛围更积极”的竞聘工作目标。 二、组织领导与工作机构 为保证本次公开选拔和竞聘上岗工作圆满完成,特成立省公司公开选拔和竞聘上岗工作领导小组,领导小组下设竞聘工作小组、第三方专家组、竞聘评估小组、竞聘监督小组、竞聘宣传小组,职责分工如下:
(一)竞聘领导小组:对本次选拔和竞聘工作进行整体规划、决策和管理。 组长:省公司党组书记、总经理李雄 组员:省公司党组成员陈乐国、阎洪生、刘士平 (二)竞聘工作小组:根据领导小组决策制定计划,组织、协调具体工作,与第三方人力资源公司共同设计竞聘方案并组织实施。 组长:省公司人力资源部经理陈友云 组员:省公司人力资源部、监察室相关工作人员 (三)第三方专家组:与省公司共同设计竞聘方案,制订竞聘实施计划,组织综合笔试及判卷、完成综合素质评估、主持现场竞聘答辩会、 培训并指导实施民主评议、汇总成绩并提出专业建议等。 组长:北京佐佑人力资源顾问公司总监许志学 组员:北京佐佑人力资源顾问公司项目组成员 (四)竞聘评估小组:参加现场竞聘演讲答辩会,对应聘者进行评估。 组长:省公司党组书记、总经理李雄 组员:省公司领导、第三方专家顾问组、省公司人力资源部负责人、 拟竞聘单位或部门主管领导。 (五)竞聘监督小组:对竞聘工作全程监督,处理竞聘工作中出现的问题。 组长:省公司纪检组长、工会主席刘士平 副组长:省公司监察室主任刘建湘
一个咨询师对人力资源咨询的认识和理解
一个咨询师对人力资源咨询的认识和理解 咨询可谓是一个新生事物,尤其在中国,相当一部分国人对"咨询"还没有概念。作为一名从事咨询工作的人员,我想谈谈对咨询,特别是对人力资源管理咨询的认识和理解。 一、什么是咨询 咨询似乎并不能称之为一个行业。在工商局,婚姻介绍所和管理顾问公司是划为一类的。这种划分,其实并没有什么道理,之所以这样,我认为,很大原因是因为没有一个对咨询的准确定位。 现在,许多人认为咨询就是信息中介和人才中介,因为他们都贯之以"信息咨询公司"、"就业咨询公司"的名字。实际上,这样的工作与真正意义上的咨询还是有很大差别的。他们可以称之为"资讯"公司,因其提供的就是一种信息(港台称为"资讯"),他们的主要工作是进行信息储备,然后根据需要,选择、打包交给客户,仅仅是一个传递的过程,其工作是有规模效应的,每一次服务的收费不会很高。 咨询则不同,比如审计、税务、财务咨询、营销咨询等,他们的主要工作是在基本原理和方法的基础上,结合客户情况,形成个性化方案。其价值主要是咨询顾问们在一定的管理模式和相关知识(经验和咨询公司的研究积累)平台上,针对客户的个性情况,进行创造性思考,提出解决方案。由于它的成果是完全针对客户定制的,成果的完成基于顾问的人数和工作时间,很难产生规模效应,咨询项目的收费也会比较高。 在咨询中,又可以分为两种,一种是代替客户解决问题,完成客户需要完成,但自己没有能力或由于某些限制不能完成的工作。比如会计师事务所的审计、税务工作。在其中,客户参与很少。而且,已经形成较为规范、固定的工作程序和方法,允许个人发挥的空间较小,其工作着眼于短期问题的解决,结果易于衡量。比如:一份审计报告。 另一种是帮助客户解决问题,与客户一起解决,正如咨询行业的标准制订者Mckinsey&Company所言,We seek to solve problems with our clients, not for them. (我们寻求与客户一起解决问题,而不是代替他们解决),整个过程客户参与很多(We work as closely as possible with key members of the client organization)。工作中要求个人发挥的部分很大,工作着眼于组织长远发展,包含几个层次,有成形的报告,有过程中思想的交流,有文化和价值观的转变,不易于在短期业绩中表现出来。 第二种类型咨询的典型代表是管理咨询,这其中又分成业务发展战略、人力资源管理、营销、财务流程优化等咨询活动。下面着重就人力资源管理咨询谈谈我的认识和理解。 二、人力资源管理咨询 对人力资源管理咨询的通常理解就是指咨询公司利用自己的知识和经验,在职位分析的基础
汽车理论1课程设计__汽车动力性匹配计算的研究
汽车理论课程设计 汽车动力性匹配计算的研究 姓名: 专业班级: 学号: 指导老师: 时间:
摘要 应用 MATLAB 进行汽车动力性匹配计算,首先求解出发动机与液力变矩器共同工作的输入输出特性,然后绘制出汽车的驱动力-行驶阻力平衡图,最后得出汽车的动力性参数,从而实现了汽车动力性匹配计算、分析及绘图的自动化,提高了设计效率和精度。 关键词:汽车动力性;匹配;MATLAB Abstract MATLAB was applied to matching calculation of the automotive dynamic performance. At fi rst, the input and output characteristics while the engine operates together with hydraulic torque converter were solved, and then the balancing diagram of automotive driving force and advancing resistance were plotted, fi nally the dynamic performance parameters were obtained. Thereby the automated calculation, analysis and plotting for matching of the automotive dynamic performance were achieved, which promoted the design effi ciency and precision. Key Words:dynamic performance; matching; MATLAB 序言 矿用汽车运行工况比较复杂,路况比较恶劣,具有载重大、速度低的特点;因此,要求汽车动力系统在汽车较低速度下能输出较大的转矩。其中,发动机与液力变矩器的匹配计算是整个地下汽车动力系统设计的关键和难点。发动机与液力变矩器的合理匹配,能使汽车在较低速度下输出较大的转矩,从而获得较好的动力性和燃油经济性。在此基础上再进行合理的挡位选择,绘出汽车在不同挡位下的驱动力-行驶阻力平衡图,最后得出汽车的最高速度、加速度和最大爬坡度等反映汽车动力性的参数,从而对汽车动力性进行评定[1]。传统的匹配计算主要是作图法和解析法,其共同缺点是工作量大,计算误差大。利用 MATLAB设计相关匹配计算程序[2],可以方便、精确地完成各种匹配计算,从而快速地对匹配方案进行筛选。 一、程序结构设计 按照流程,程序主要包括发动机外特性曲线的拟合、发动机与液力变矩器的匹配计算以及汽车动力性计算这 3 个模块[3]。 二、发动机外特性曲线的拟合 发动机外特性曲线是进行发动机与液力变矩器匹配计算的基础,通过发动机台架试验获得,常用 Me =Me(ne) 或 Ne = Ne(ne) 曲线表示。本文选用 Me =
国际咨询VS本土咨询公司
国际咨询PS本土咨询 我们着眼点就是从客户角度,业务能力、价格和品牌是企业选择咨询服务时,排在最前面的考虑因素。 选择咨询服务的依据: 全球知识型公司TOP20中,咨询公司就占了4席;伴随着中国市场快速成长的中国管理咨询公司,普遍偏小,与最受赞赏的知识型公司TOP20还有相当的距离,而中国的咨询市场早就已经国际化了; 这其实也是客户在选择咨询公司时除收费之外的主要考察因素,包括7个方面:声望、客户及客户评价、核心能力和经验、咨询方法和工具、持续学习和研究能力、专家网络和案例库、收入增长和企业发展。 把客户的服务体验和客户满意度,以及咨询公司的核心能力和经验,作为重点之中的重点- 管理咨询服务有5大领域需求最强劲,分别为:战略咨询、IT管理咨询、组织与流程咨询、人力资源咨询、营销咨询。 ● 战略管理咨询 战略咨询是国际咨询公司的传统领地,基本上都被国际咨询公司抢占,本土公司只是在战略落地方面凭着熟悉中国市场、管理和文化上的优势,能够占有一席之地。 在2010年度管理咨询公司专业能力排行中,战略管理咨询领域排名前5的分别是:博斯(Booz&Co.)咨询公司、麦肯锡咨询公司、波士顿咨询公司、罗兰贝格咨询公司、贝恩咨询公司。 博斯咨询并没有像麦肯锡等咨询公司那样在国内有极高的知名度,主要原因是博斯咨询进入中国稍晚。博斯咨询在国际声望排名第四,进入中国后快速适应并以效果赢得客户,客户评价高是博斯制胜的秘诀。 细分领域中,CFI(科罗思咨询)、益普索(中国)分列“顾客满意度战略”领域前两名,而在“战略执行”领域,以本土咨询公司占有优势,创越国际、佐佳国际、仁达方略分列前三名。 ● IT管理咨询 本次排行分为3个细分领域,其中,在“IT战略与规划”领域,埃森哲、IBM咨询、凯捷咨询分列前三名;在“电子商务及实施”领域,IBM咨询、埃森哲、惠普咨询分列前三名。值得注意的是,在“知识管理”领域,长城企业战略研究所、蓝凌咨询、AMT咨询分列前三,本土咨询公司在细分领域中夺得一席之地。 ● 组织与流程咨询 本次排行分为5个细分领域,其中国际咨询公司占有其三,本土咨询占有其二。
《汽车理论》知识点最新全总结
《汽车理论》知识点全总结 第一部分:填空题 第一章.汽车的动力性 1.从获得尽可能高的平均行驶速度的观点出发,汽车的动力性指标主要是:(1)汽车的最高车速Umax(2)汽车的加速时间t(3)汽车的最大爬坡度imax。 2.常用原地起步加速时间和超车加速时间来表明汽车的加速性能。 3.汽车在良好路面的行驶阻力有:滚动阻力,空气阻力,坡道阻力,加速阻力。 4.汽车的驱动力系数是驱动力与径向载荷之比。 5.汽车动力因数D=Ψ+δdu/g dt。 6.汽车行驶的总阻力可表示为:∑F=Ff+Fw+Fj+Fi 。其中,主要由轮胎变形所产生的阻力称:滚动阻力。 7.汽车加速时产生的惯性阻力是由:平移质量和旋转质量对应的惯性力组成。 8.附着率是指:汽车直线行驶状况下,充分发挥驱动力作用时要求的最低地面附着系数。 9.汽车行驶时,地面对驱动轮的切向反作用力不应小于滚动阻力、加速阻力与坡道阻力之和,同时也不可能大于驱动轮法向反作用力与附着系数的乘积。 10.车速达到某一临界车速时,滚动阻力迅速增长,此时轮胎发生驻波现象。 第二章.汽车的燃油经济性 1.国际上常用的燃油经济性评价方法主要有两种:即以欧洲为代表的百公里燃油消耗量和以美国为代表的每加仑燃油所行驶的距离。 2.评价汽车燃油经济性的循环工况一般包括:等速行驶,加速、减速和怠速停车多种情况。 3.货车采用拖挂运输可以降低燃油消耗量,主要原因有两个:(1)带挂车后阻力增加,发动机的负荷率增加,使燃油消耗率b下降(2)汽车列车的质量利用系数(即装载质量与整车整备质量之比)较大。 4.从结构方面提高汽车的燃油经济性的措施有:缩减轿车尺寸和减轻质量、提高发动机经济性、适当增加传动系传动比和改善汽车外形与轮胎。 5.发动机的燃油消耗率,一方面取决于发动机的种类、设计制造水品;另一方面又与汽车行驶时发动机的负荷率有关。 6.等速百公里油耗正比于等速行驶时的行驶阻力与燃油消耗率,反比于传动效率。 第三章.汽车动力装置参数的选定 1.汽车动力装置参数系指:发动机的功率和传动系的传动比;它们对汽车的动力性和燃油经济性有很大影响。2.确定最大传动比时,要考虑三方面的问题:最大爬坡度、附着率及汽车最低稳定车速。 3.确定最小传动比时,要考虑的问题:保证发动机输出功率的充分发挥、足够的后备功率储备、受驾驶性能限制和综合考虑动力性和燃油经济性。 4.某厂生产的货车有两种主传动比供用户选择,对山区使用的汽车,应选择传动比大的主传动比,为的是增大车轮转矩,使爬坡能力有所提高。但在空载行驶时,由于后备功率大,故其燃油经济性较差。 5.在同一道路条件与车速下,虽然发动机发出的功率相同,但变速器使用的档位越低,后备功率越大,发动机的负荷率越低,燃油消耗率越高。 6.单位汽车总质量具有的发动机功率称为比功率,发动机提供的行驶功率与需要的行驶功率之差称为后备功率。7.变速器各相邻档位速比理论上应按等比分配,为的是充分利用发动机提供的功率,提高汽车的动力性。 8.增加挡位数会改善汽车的动力性和燃油经济性,这是因为:就动力性而言,挡位数多,增加了发动机发挥最大功率附近高功率的机会,提高了汽车的加速和爬坡能力。就燃油经济性而言,挡位数多,增加了发动机在低燃油消耗率区工作的可能性,降低了油耗。 9.对汽车动力性和燃油经济性有重要影响的动力装置参数有两个,即最小传动比和传动系挡位数。