Allegro SI调用S参数模型与HSpice模型进行复杂系统仿真
SigXplorer调用S参数模型与HSpice模型进行系统复杂仿真
——孙海峰
我们使用Allegro SI/SigXplorer仿真环境,对系统板级拓扑结构进行仿真时,可以导入S参数模型与Spice电路模型进行仿真。
1. SigXplorer调用信号S参数模型
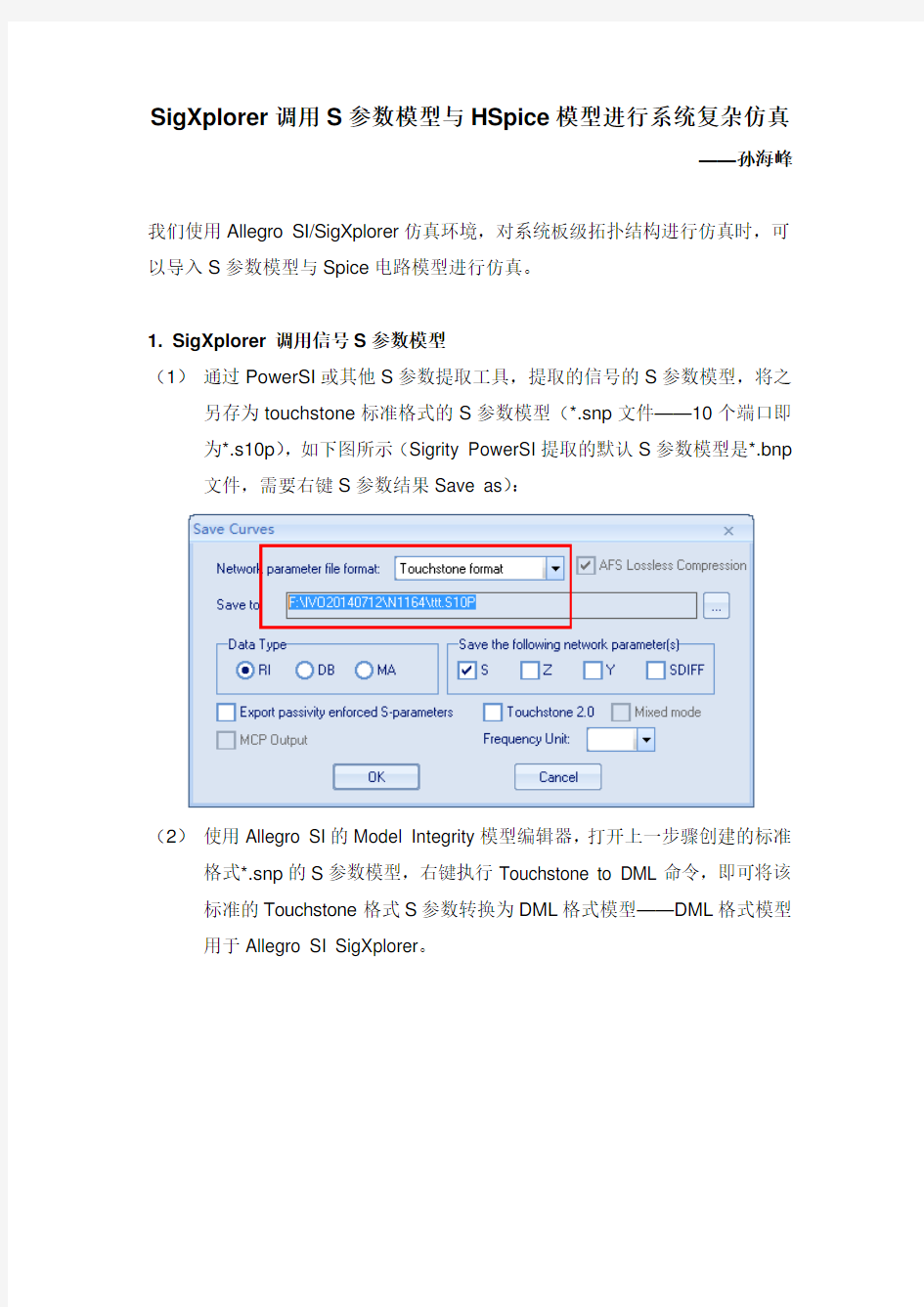
(1) 通过PowerSI或其他S参数提取工具,提取的信号的S参数模型,将之另存为touchstone标准格式的S参数模型(*.snp文件——10个端口即为*.s10p),如下图所示(Sigrity PowerSI提取的默认S参数模型是*.bnp 文件,需要右键S参数结果Save as):
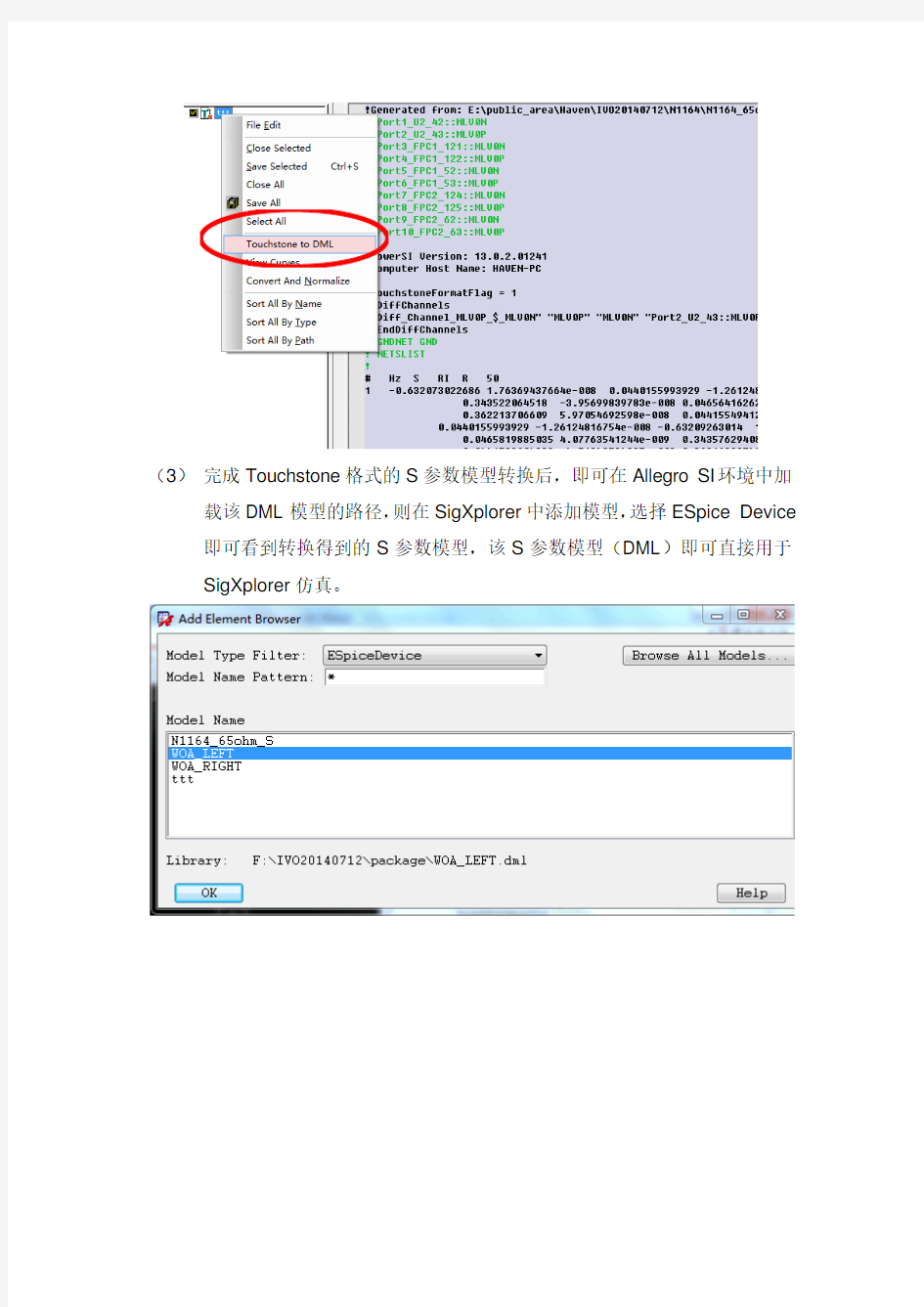
(2) 使用Allegro SI的Model Integrity模型编辑器,打开上一步骤创建的标准格式*.snp的S参数模型,右键执行Touchstone to DML命令,即可将该标准的Touchstone格式S参数转换为DML格式模型——DML格式模型用于Allegro SI SigXplorer。
(3) 完成Touchstone格式的S参数模型转换后,即可在Allegro SI环境中加载该DML模型的路径,则在SigXplorer中添加模型,选择ESpice Device 即可看到转换得到的S参数模型,该S参数模型(DML)即可直接用于
SigXplorer仿真。
完成以上操作之后,SigXplorer中即可使用这些S参数模型用于信号完整性仿真(Allegro SI默认仿真引擎即可对其进行调用仿真)。
2. SigXplorer调用HSpice芯片电路模型
(1) 在SigXplorer中加载芯片的HSpice电路模型的路径后,我们即可在
Model Browser中查看路径下所有的HSpice电路模型,如下图所示:
(2) 选择需要转换的HSpice电路模型,点击Translate命令,即可进入Spice 模型向可以仿真的DML模型的转换过程(也可以通过Sigrity T2B将Spice
模型转换至ibis模型)。
(3) 在HSPICE Model Translation Wizard模型转换向导中,我们即可根据向导一步步完成模型的转换,当然转换过程中必须了解其DC Voltage。(4) 完成模型转换后,即可在Buffer Model中选择对应模型.
3. 仿真引擎设置
芯片的HSpice电路模型完成转换后,在SigXplorer中对其仿真,如果使用默认的TLSim仿真算法引擎,将会报错如下图所示:
由此可知,拓扑结构中如果有Spice电路模型(转换至DML中还是Spice电路模型的存在格式),使用Allegro SI原始的仿真引擎无法分析Spice电路语法,因此需要加载HSpice引擎,从而对包括HSpice模型的拓扑进行仿真。
(1) 安装HSpice软件,如下图所示:
(2) 完成HSpice软件安装后,在“我的电脑”的高级环境变量中,将Hspice各引擎(*.exe)所在的路径加载到Path属性,使得HSpice引擎能够在后台被电脑调用(64位操作系统必须加载INSTALL PATH/WIN64)。
(3) 在SigXplorer仿真界面中,执行Analyze/Preference命令,即可打开仿真参数设置界面,其中Simulation Parameters选项卡中需要设置HSpice 引擎(默认引擎TLsim)。
(4) 选择HSpice引擎后,在SigXplorer仿真环境中,即可对HSpice电路模型所在的拓扑进行信号完整性仿真,且Allegro SI直接调用HSpice引擎,仿真完成后结果实时在SigWave界面中显示仿真波形。
因此,我们在使用Allegro SI对信号进行SI仿真时,不仅可以直接提取拓扑结构,配合IBIS模型进行仿真;Allegro SI也可以直接调用其他工具提取的S参
数模型,以及芯片HSpice模型进行仿真。
SNP分析命令
E:\ > cd e: E:\ E:\ > cd plink-1 E:\plink-1>plink –file test 1.Map 更新 Plink --sheep --file data --update-map position.txt --recode --out data1 Chrnew.txt -- update-chr --recode --out data2 Position: SNP code and position Chrnew:SNP code and Chr. 2.SNP merge Plink --file data1 --merge data2.ped data2.map --recode --out merge 3.提取SNP位点 Plink --file data --extract 50kSNP.txt --recode --out data1 50kSNP.txt: 50k中的SNP名 4. Quality control Call rate >98%/99% Plink --file sheep --geno 0.02 --recode --out sheepgeno Plink --file sheepgeno --mind 0.01 --recode --out sheepmind MAF>0.05 Plink --file sheepmind --maf 0.05 --recode --out sheepmaf Hardy-Weinberg equilibrium <0.0001 Plink --file sheepmaf --hwe 0.0001 --recode --out sheephwe Exclude the SNP markers with either chromosome or both unknown Plink --sheep --file sheephwe --extract 4newsnp.txt --recode --out sheep4 Note: 制作4newsnp.txt(包含chromosome 和base-pair position 都为0的SNP) To identify sample duplication or half-sibs or closer Plink –sheep –file sheep4 –genome –max 0.85 Note:Check the genome file 5. LD quality control Plink –sheep --file sheep4 –indep-pairwise 100 25 0.2 –out sheepld0.2 Plink --sheep --file sheep4 --indep-pairwise 100 25 0.05 --out sheepld0.05 Plink--file sheep4--ld-window-r2 0.2 --out sheepldr0.2 输出结果为data prunein 和data prune out (质控时,要去除X染色体) 将data prune in 转化为ped和map Plink --sheep --file 114hwe --extract 114sheep0.05.prune.in --recode --out sheepforpca 6. PCA- PCA的三个文件: Plink --sheep --file data(生成LD的文件) --extract data (LD).prune.in --recode --out sheepforpca 1sheepforpca.ped 改为5.ped 2sheepforpca.map 改为5.pedsnp 3将sheepforpca 制作成二进制文件输出5b plink --file hapmap1 --make-bed --out hapmap1 结果为5b.farm即为ped文件的前6列,将5b.farm 改名为5.pedind
浅析电力系统模型参数辨识
浅析电力系统模型参数辨识 (贵哥提供) 一、现状分析 随着我国电力事业的迅猛发展, 超高压输电线路和大容量机组的相继投入, 对电力系统稳定计算、以及其安全性、经济性和电能质量提出了更高的要求。现代控制理论、计算机技术、现代应用数学等新理论、新方法在电力系统的应用,正在促使电力工业这一传统产业迅速走向高科技化。 我国大区域电网的互联使网络结构更复杂,对电力系统安全稳定分析提出了更高的要求,在线、实时、精确的辨识电力系统模型参数变得更加紧迫。由于电力系统模型的基础性、重要性,国外早在上世纪三十年代就开始了这方面的分析研究,[1,2]国内外的电力工作者在模型参数辨识方面做了大量的研究工作。[3]随后IEEE相继公布了有关四大参数的数学模型。1990年全国电网会议上的调查确定了模型参数的地位,促进了模型参数辨识的进一步发展,并提出了研究发电机、励磁、调速系统、负荷等元件的动态特性和理论模型,以及元件在极端运行环境下的动态特性和参数辨识的要求。但传统的测量手段,限制了在线实时辨识方法的实现。 同步相量测量技术的出现和WAMS系统的研究与应用,使实现在线实时的电力系统模型参数辨识成为可能。同步相量是以标准时间信号GPS作为同步的基准,通过对采样数据计算而得的相量。相量测量装置是进行同步相量测量和输出以及动态记录的装置。PMU的核心特征包括基于标准时钟信号的同步相量测量、失去标准时钟信号的授时能力、PMU与主站之间能够实时通信并遵循有关通信协议。 自1988年Virginia Tech研制出首个PMU装置以来,[4]PMU技术取得了长足发展,并在国内外得到了广泛应用。截至2006年底,在我国范围内,已有300多台P MU装置投入运行,并且可预计,在不久的将来PMU装置会遍布电力系统的各个主要电厂和变电站。这为基于PMU的各种应用提供了良好的条件。 二、系统辨识的概念 系统模型是实际系统本质的简化描述。[5]模型可分为物理模型和数学模型两大类。物理模型是根据相似原理构成的一种物理模拟,通过模型试验来研究系统的
SNP数据统计详细方法
S N P数据统计详细方法集团标准化小组:[VVOPPT-JOPP28-JPPTL98-LOPPNN]
S N P操作步骤与结果记录 按照陈丽学位论文第二部—— 步骤一、使用在线软件SHEsis检验各个危险的hw遗传平衡(因rs2607659未发生突变,故不纳入分析。) 结论:9个位点P值均大于0.05,均符合HW遗传平衡。(有附件) 步骤二、分析前将协变量进行分类,并用KS法检验连续变量正态性,结果如下: 正态性连续变量非正态连续变量分类变量 ALT CReGFR-A ASTBMIHBeAg 年龄eGFR年龄-A 药物浓度ADV合用 性别 步骤三、用KM生存曲线画出某一位点的CK升高时间与累积危险函数之间的曲线,(KM曲线中状态选项选择服药四年CK数据组)并联合Log-rank检验,比较该位点突变与否对CK结局的差异。结果:9个位点P值均大于0.05 即:这些位点的变异对CK升高作用无差异。为验证统计操作的正确性,将TK2基因rs3826160位点进行统计,得到的KM曲线与Log-rankP值与陈丽师姐论文相同。故统计操作正确。 (SPSS输出结果见附件) 步骤四、对协变量进行单因素分析,排除rs位点突变与其他临床因素对CK产生相反作用,掩盖rs位点对CK结局影响的情况。 选择二元Logistic回归(除根据P值定性外,可提供OR值观察因素的影响程度)方法。影响CK 的临床因素(P<0.05)如下: 协变量P 性别0.000 药物浓度0.007 年龄0.032 BMI0.016 HBVDNA-A0.021 CR0.01 eGFR0.03 (SPSS输出结果见附件)
【原创】R语言时变参数VAR随机模型数据分析报告论文(代码数据)
咨询QQ:3025393450 有问题百度搜索“”就可以了 欢迎登陆官网:https://www.360docs.net/doc/873957209.html,/datablog R语言时变参数VAR随机模型数据分析报告 来源:大数据部落 摘要 时变参数VAR随机模型是一种新的计量经济学方法,用于在具有随机波动率和相关状态转移的时变参数向量自回归(VAR)的大模型空间中执行随机模型规范搜索(SMSS)。这是由于过度拟合的关注以及这些高度参数化模型中通常不精确的推断所致。对于每个VAR系数,这种新方法自动确定它是恒定的还是随时间变化的。此外,它可用于将不受限制的时变参数VAR收缩到固定VAR因此,提供了一种简单的方法(概率地)在时变参数模型中施加平稳性。我们通过局部应用证明了该方法的有效性,我们在非常低的利率期间调查结构性冲击对政府支出对美国税收和国内生产总值(GDP)的动态影响。 引言 向量自回归(VAR)广泛用于宏观经济学中的建模和预测。特别是,VAR已被用于理解宏观经济变量之间的相互作用,通常通过估计脉冲响应函数来表征各种结构性冲击对关键经济变量的影响。 状态空间模型
咨询QQ:3025393450 有问题百度搜索“”就可以了 欢迎登陆官网:https://www.360docs.net/doc/873957209.html,/datablog 允许时间序列模型中的时变系数的流行方法是通过状态空间规范。具体而言,假设? 是? 对因变量的观测的×1向量,X 是? ×上解释变量的观测矩阵,β是状 态的×1向量。然后可以将通用状态空间模型编写为(1) (2) 这种一般的状态空间框架涵盖了宏观经济学中广泛使用的各种时变参数(TVP)回归模型,并已成为分析宏观经济数据的标准框架。然而,最近的研究引起了人们的担忧,过度拟合可能是这些高度参数化模型的问题。此外,这些高维模型通常给出不精确的估计,使任何形式的推理更加困难。受这些问题的影响,研究人员可能希望有一个更简约的规范,以减少过度参数化的潜在问题,同时保持状态空间框架的灵活性,允许系数的时间变化。例如,人们可能希望拥有一个具有时不变系数的默认模型,但是当有强有力的时间变化证据时,这些系数中的每一个都可以转换为随时间变化的。通过这种方式,人们可以保持简洁的规范,从而实现更精确的估计,同时最大限度地降低模型错误指定的风险。 结果 我们实施了Gibbs采样器,以获得VECM模型中参数的25,000个后抽取。 BKK采用类似的“标准化”系列的方法,只影响先前的规范,只要在后验计算中适当考虑转换即可。或者,可以使用原始系列并使用训练样本来指定先验,虽然这在操作上更加复杂。值得注意的是,我们在SMSS和TVP-SVECM规范中应用了相同的标准化。 我们的算法实现也使用了三个广义Gibbs步骤算法的稳定性,通过跟踪所有抽样变量的低效率因素和复制模拟运行多次验证。 SMSS产生的IRF与对角线转换协方差的比较,具有完全转换协方差的SMSS和基准TVP-SVECM在2000Q1的支出减少1%之后的20个季度。
模型计算步骤
计算步骤步骤目标 建模或计算条件控制条件及处理1.符合原结构传力模式2.符合原结构边界条件3.符合采用程序的假定条件1.振型组合数→有效质量参与系数>0.9吗?→否,则增加2.最大地震力作用方向角→θ0-θm >150?→是,输入θ0=θm ,附加方向角θ0=03.结构自振周期,输入值与计算值相差>10%?→是,按计算值改输入值4.查看三维振型图,确定裙房参与计算范围→修正计算简图5.短肢剪力墙承担的抗倾覆力矩<40%?→是,改为一般剪力墙结构;短肢剪力墙承担的抗倾 覆力矩>50%?→是,规范不许,修改设计 6.框剪结构框架承担的抗倾覆力矩>50%?→是,框架抗震等级按框架结构确定;若为多层结构,可定义为框架结构,抗震墙可作为次要抗侧力构件,其抗震等级可降低一级。 1.周期比控制:T 扭/T 1≤0.9(0.85)?→否,修改结构布置,强化外围削弱中间 2.层位移比控制:最大/平均≤1.2?→否,按双向地震重算 3.侧向刚度比控制:要求见规范;不满足时程序自动定义为薄弱层 4.层受剪承载力控制:Q i /Q i+1<[0.65(0.75)]?→否,修改结构布置;0.65(0.75)≤Q i /Q i+1<0.8?→否,强制指定为薄弱层(注:括号中数据为B级高层),(《高规》4.4.3条) 5.整体稳定控制:刚重比≥[10(框架),1.4(其它)] 6.最小地震剪力控制:剪重比≥0.2αmax?→否,增加振型数或增大地震剪力系数 7.层位移角控制:弹性Δu ei /h i ≤[1/550(框架),1/800(框剪),1/1000(其它)];弹塑性Δ u pi /h i ≤[1/50(框架),1/100(框剪),1/120(其它)]1.构件构造最小断面控制和截面抗剪承载力验算 2.构件斜截面承载力验算(剪压比控制) 3.构件正截面承载力验算 4.构件最大配筋率控制 5.纯弯和偏心构件受压区高度限制 6.竖向构件轴压比控制 7.剪力墙的局部稳定控制 8.梁柱节点核心区抗剪承载力验算 1.钢筋最大最小直径限制 2.钢筋最大最小间距要求 3.最小配筋配箍要求 4.重要部位的加强和明显不合理部分局部调整2.计算一(一次或多次)整体参数 的正确确 定 1.地震方向角θ0=0;2.单向地震+平扭耦联;3.不考虑偶然偏心;4.不强制全楼刚性楼板;5.按总刚分析;6.短肢墙多时定义为短肢剪力墙结构;1.按计算一、二确定的模型和参数;2.取消全楼强制刚性板;3.按总刚分析;4.对特殊构件人工指定。构件优化设计(构件超筋超限控制)4.计算三(一次或多次)5.绘制施工图结构构造抗震构造措施几何及荷 载模型 1.建模整体建模判定整体结构的合理性(平面和竖向规则性控制) 1.地震方向角θ0=0,θ m ; 2.单(双)向地震+平扭耦 联; 3.(不)考虑偶然偏心; 4.强制全楼刚性楼板; 5.按侧刚分析; 6.按计算一的结果确定结 构类型和抗震等级3.计算二(一次或多次)
S参数精讲
S参数测量是射频设计过程中的基本手段之一。S参数将元件描述成一个黑盒子,并被用来模拟电子元件在不同频率下的行为。在有源和无源电路设计和分析中经常会用到S参数。 S参数是RF工程师/SI工程师必须掌握的内容,业界已有多位大师写过关于S 参数的文章,即便如此,在相关领域打滚多年的人,可能还是会被一些问题困扰着。你懂S参数吗? 请继续往下看...台湾同行图文独特讲解! 1、简介:从时域与频域评估传输线特性 良好的传输线,讯号从一个点传送到另一点的失真(扭曲),必须在一个可接受的程度内。而如何去衡量传输线互连对讯号的影响,可分别从时域与频域的角度观察。 S参数即是频域特性的观察,其中"S"意指"Scatter",与Y或Z参数,同属双端口网络系统的参数表示。
S参数是在传输线两端有终端的条件下定义出来的,一般这Zo=50奥姆,因为V NA port也是50奥姆终端。所以,reference impedance of port的定义不同时,S参数值也不同,即S参数是基于一指定的port Zo条件下所得到的。 2. 看一条线的特性:S11、S21 看一条线的特性:S11、S21 如下图所示,假设port1是讯号输入端,port2是讯号输出端 S11表示在port 1量反射损失(return loss),主要是观测发送端看到多大的的讯号反射成份;值越接近0越好(越低越好,一般-25~-40dB),表示传递过程反射(reflection)越小,也称为输入反射系数(Input Reflection Coefficient)。
S21表示讯号从port 1传递到port 2过程的馈入损失(insertion loss),主要是观测接收端的讯号剩多少;值越接近1越好(0dB),表示传递过程损失(loss)越小,也称为顺向穿透系数(Forward Transmission Coefficient)。 3、看两条线的相互关系:S31、S41 虽然没有硬性规定1、2、3、4分别要标示在线哪一端,但[Eric Bogatin大师]建议奇数端放左边,且一般表示两条线以上cross-talk交互影响时,才会用到S31。以上图为例,S31意指Near End Cross-talk (NEXT),S41意指Far End Cross-talk (FEXT). 4、看不同模式的讯号成份:SDD、SCC、SCD、SDC 以上谈的都是single ended transmission line (one or two line),接着要谈differential pair结构。
PID控制系统的Simulink仿真分析
实验报告 课程名称:MATLAB语言与控制系统仿真 实验项目:PID控制系统的Simulink仿真分析专业班级: 学号: 姓名: 指导教师: 日期: 机械工程实验教学中心
注:1、请实验学生及指导教师实验前做实验仪器设备使用登记; 2、请各位学生大致按照以下提纲撰写实验报告,可续页; 3、请指导教师按五分制(优、良、中、及格、不及格)给出报告成绩; 4、课程结束后,请将该实验报告上交机械工程实验教学中心存档。 一、实验目的和任务 1.掌握PID 控制规律及控制器实现。 2.掌握用Simulink 建立PID 控制器及构建系统模型与仿真方法。 二、实验原理和方法 在模拟控制系统中,控制器中最常用的控制规律是PID 控制。PID 控制器是一 种线性控制器,它根据给定值与实际输出值构成控制偏差。PID 控制规律写成传递 函数的形式为 s K s Ki K s T s T K s U s E s G d p d i p ++=++==)1 1()() ()( 式中,P K 为比例系数;i K 为积分系数;d K 为微分系数;i p i K K T =为积分时间常数; p d d K K T =为微分时间常数;简单来说,PID 控制各校正环节的作用如下: (1)比例环节:成比例地反映控制系统的偏差信号,偏差一旦产生,控制器立即产 生控制作用,以减少偏差。 (2)积分环节:主要用于消除静差,提高系统的无差度。积分作用的强弱取决于积 分时间常数i T ,i T 越大,积分作用越弱,反之则越强。 (3)微分环节:反映偏差信号的变化趋势(变化速率),并能在偏差信号变得太大 之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减少调 节时间。 三、实验使用仪器设备(名称、型号、技术参数等) 计算机、MATLAB 软件 四、实验内容(步骤) 1、在MATLAB 命令窗口中输入“simulink ”进入仿真界面。 2、构建PID 控制器:(1)新建Simulink 模型窗口(选择“File/New/Model ”),在 Simulink Library Browser 中将需要的模块拖动到新建的窗口中,根据PID 控制器的 传递函数构建出如下模型:
S参数详解
电子元器件S参数的含义和用途 在进行射频、微波等高频电路设计时,节点电路理论已不再适用,需要采用分布参数电路的分析方法,这时可以采用复杂的场分析法,但更多地时候则采用微波网络法来分析电路,对于微波网络而言,最重要的参数就是S参数。在个人计算机平台迈入GHz阶段之后,从计算机的中央处理器、显示界面、存储器总线到I/O接口,全部走入高频传送的国度,所以现在不但射频通信电路设计时需要了解、掌握S参数,计算机系统甚至消费电子系统的设计师也需要对相关知识有所掌握。 S参数的作用S参数的由来和含义 在低频电路中,元器件的尺寸相对于信号的波长而言可以忽略(通常小于波长的十分之一),这种情况下的电路被称为节点(Lump)电路,这时可以采用常规的电压、电流定律来进行电路计算。其回路器件的基本特征为: ●具体来说S参数就是建立在入射波、反射波关系基础上的网络参数,适于微波电路分析,以器件端口的反射信号以及从该端口传向另一端口的信号来描述电路网络。 ●针对射频和微波应用的综合和分析工具几乎都许诺具有用S参数进行仿真的能力,这其中包括安捷伦公司的ADS(Advanced Design System),ADS被许多射频设计平台所集成。 ●在进行需要较高频率的设计时,设计师必须利用参数曲线以及预先计算的散射参数(即S-参数)模型,才能用传输线和器件模型来设计所有物理元件。 ○电阻:能量损失(发热) ○电容:静电能量 ○电感:电磁能量 但在高频微波电路中,由于波长较短,组件的尺寸就无法再视为一个节点,某一瞬间组件上所分布的电压、电流也就不一致了。因此基本的电路理论不再适用,而必须采用电磁场理论中的反射及传输模式来分析电路。元器件内部电磁波的进行波与反射波的干涉失去了一致性,电压电流比的稳定状态固有特性再也不适用,取而代之的是“分布参数”的特性阻抗观念,此时的电路被称为分布(Distributed)电路。分布参数回路元器件所考虑的要素是与电磁波的传送与反射为基础的要素,即: ○反射系数 ○衰减系数 ○传送的延迟时间 分布参数电路必须采用场分析法,但场分析法过于复杂,因此需要一种简化的分析方法。微
第07章 第三节 变参数模型
第三节 变参数模型 前面几章讨论的回归问题都是在模型中的参数不变的前提下进行的,但是通过本章的讨论,可以看出引入了虚拟变量后,回归模型中的参数不在是固定不变的,而是二是可以变化的,但是模型中参数的变化又不是连续的额,而是离散的,下面我们介绍的变参数模型就是虚拟变量模型的推广,它认为回归模型的截距或斜率会随着样本观察值的改变而改变。变参数模型可以分为截距变参数模型和截距、斜率同时变动的模型。 一、 截距变动模型 设线性回归方程为 122t t t t k kt t Y X X u βββ=++++Y t=1,2,,T (7.40) 式中, X 为解释变量,Y 为被解释变量。 观察到截距项1t β和前边的虚拟变量模型的截距项有所不同,下边多了一个 下标t 。这也就是说,虽然回归模型斜率在整个样本时期保持不变,但是截距项 1t β是随着时间的变化而变化的。如果1t β的变化是非随机的,而且这种变化完全 由外生变量决定的,那么式(7.40)就是一个非随机变量参数模型。为了讨论方便,把(7.40) 定义为下面的式子: 101t t Z βαα=+ (7.41) 式中,0α和1α为要求的参数,也可以称为“超参数”,t Z 只用来解释变动情况的外生变量。将式(7.41)代入式(7.40)中,整理得到 0122t t t k kt t Y Z X X u ααββ=+++++ (7.42) 可用最小二乘法对式(7.42)中的超参数和其他参数一并进行估计。如果Z 为虚拟变量,那么式中(7.42)就是一个虚拟变量模型,而且是一个截距项变动斜率不变的模型。因此,虚拟变量模型是参数模型的一种特殊形式。 二、 截距和斜率同时变动模型 如果模型中的斜率和截距同时变动,只需在式(7.42)的基础上进行改进,将2β换2t β为,且假定有如下关系式: 201t t b bW β=+ (7.43) 将式(7.43)代入式(7.42)则有 01021233t t t t t t k k t t Y a a Z b X b W X X X u ββ=+++++++ (7.44) 以上模型知识假定1t β和2t β存在系统变化,实际上还有很多参数都可能存在这种变化,甚至可能存在1t β和2t β等系数有可能不是线性的,也就是超参数本身
SNP基因型分析
Powerful, Proven Chemistry Whether your genotyping studies require targeted detection of essential SNPs, or the flexibility for choosing SNPs for mapping, TaqMan SNP Genotyping Assays are the technology of choice. Proven TaqMan probes, which incorporate minor groove binder (MGB) technology at the 3’ end, deliver superior allelic discrimination. The MGB molecule binds to the minor groove of the DNA helix, improving hybridization-based assays by stabilizing the MGB-probe/template complex. The increased binding stabilization permits the use of probes as short as 13 bases TaqMan ? SNP Genotyping Assays TaqMan ? SNP Genotyping Assays from Applied Biosystems provide a highly flexible technology for detection of poly-morphisms within any genome. With the simplest workflow available, TaqMan ? Assays are the quickest way to generate genotyping data. Based on powerful TaqMan ? probe and primer chemistry and designs, and coupled to dependable Applied Biosystems instruments and software, these Made-to-Order assays produce high-confidence results. These TaqMan Assays are ideal for genotyping applications including screening, associa-tion, candidate region, candidate gene, or fine-mapping studies. Content-rich marker-selection tools simplify study design and help you select from a library of human and mouse assays. This library includes over 4.5 million genome-wide human assays (of which 3.5 million are HapMap SNP-based assays, 160,000 are validated assays, and over 70,000 are coding region assays) and 10,000 mouse assays. We also offer over 2,600 Inventoried Drug Metabolism Genotyping Assays. Additionally, Custom TaqMan ? SNP Genotyping Assays let you create your own confidential assays by submitting target SNP sequences for any genome. Let TaqMan SNP Genotyping Assays accelerate the pace of your discovery by eliminating time-consuming experimental design and optimization. Figure 1. Allelic discrimination is achieved by the selective annealing of TaqMan ? MGB probes.
复杂过程控制系统设计与Simulink仿真
银河航空航天大学 课程设计 (论文) 题目复杂过程控制系统设计与Simulink仿 真 班级 学号 学生姓名 指导教师
目录 0. 前言 (1) 1. 总体方案设计 (2) 2. 三种系统结构和原理 (3) 2.1 串级控制系统 (3) 2.2 前馈控制系统 (3) 2.3 解耦控制系统 (4) 3. 建立Simulink模型 (5) 3.1 串级 (5) 3.2 前馈 (5) 3.3 解耦 (7) 4. 课设小结及进一步思想 (15) 参考文献 (15) 附录设备清单 (16)
复杂过程控制系统设计与Simulink仿真 姬晓龙银河航空航天大学自动化分校 摘要:本文主要针对串级、前馈、解耦三种复杂过程控制系统进行设计,以此来深化对复杂过程控制系统的理解,体会复杂过程控制系统在工业生产中对提高产品产量、质量和生产效率的重要作用。建立Simulink模型,学习在工业过程中进行系统分析和参数整定的方法,为毕业设计对模型进行仿真分析及过程参数整定做准备。 关键字:串级;前馈;解耦;建模;Simulink。 0.前言 单回路控制系统解决了工业过程自动化中的大量的参数定制控制问题,在大多数情况下这种简单系统能满足生产工艺的要求。但随着现代工业生产过程的发展,对产品的产量、质量,对提高生产效率、降耗节能以及环境保护提出了更高的要求,这便使工业生产过程对操作条件要求更加严格、对工艺参数要求更加苛刻,从而对控制系统的精度和功能要求更高。为此,需要在单回路的基础上,采取其它措施,组成比单回路系统“复杂”一些的控制系统,如串级控制(双闭环控制)、前馈控制大滞后系统控制(补偿控制)、比值控制(特殊的多变量控制)、分程与选择控制(非线性切换控制)、多变量解耦控制(多输入多输出解耦控制)等等。从结构上看,这些控制系统由两个以上的回路构成,相比单回路系统要多一个以上的测量变送器或调节器,以便完成复杂的或特殊的控制任务。这类控制系统就称为“复杂过程控制系统”,以区别于单回路系统这样简单的过程控制系统。 计算机仿真是在计算机上建立仿真模型,模拟实际系统随时间变化的过程。通过对过程仿真的分析,得到被仿真系统的动态特性。过程控制系统计算机仿真,为流程工业控制系统的分析、设计、控制、优化和决策提供了依据。同时作为对先进控制策略的一种检验,仿真研究也是必不可少的步骤。控制系统的计算机仿真是一门涉及到控制理论、计算机数学与计算机技术的综合性学科。控制系统仿真是以控制系统的模型为基础,主要用数学模型代替实际控制系统,以计算机为工具,对控制系统进行实验和研究的一种方法。在进行计算机仿真时,十分耗费时间与精力的是编制与修改仿真程序。随着系统规模的越来越大,先进过程控制的出现,就需要行的功能强大的仿真平台Math Works公司为MATLAB提供了控制系统模型图形输入与仿真工具Simulink,这为过程控制系统设计与参数整定的计算与仿真提供了一个强有力的工具,使过程控制系统的设计与整定发生了革命性的变化。
S 文件格式详解
S19文件格式详解 1.概述 为了在不同的计算机平台之间传输程序代码和数据,摩托罗拉将程序和数据文件以一种可打印的格式(ASCII格式)编码成s格式文件。 S-record格式文件是Freescale CodeWarrior编译器生成的后缀名为.S19的程序文件,S格式文件是Freescale推荐使用的标准文件传送格式。编译完成之后,Freescale CodeWarrior编译器将在bin文件夹下自动生成“*.abs.s19”文件,这个文件包含最终下载带单片机中的所有内容。 是一段直接烧写进MCU的ASCII码,英文全称问Motorola format for EEPROM programming。 2.格式定义及含义 S-record每行最大是78个字节,156个字符。 S格式文件中的每一行称为一个S记录,每个S记录由记录类型、记录长度、存储地址、代码/数据、校验和5个部分组成。 每字节数据被编码成2个16进制字符,第一个字符代表数据的高四位,第二个字符代表数据的低4位。 5个部分具体内容如下: 记录类型/ 记录长度/ 存储地址/ (代码/数据) / 校验和 记录类型: 2个字符(即1个字节),用来描述记录的类型。记录供定义了8种类型: S0:S格式文件的第一个记录,表示文件名(含路径),存储地址部分没有使用,以0000置位。此记录表示记录的开始,无需下载到MCU。 S1: 地址长度为2字节(4个字符)的记录。记录类型是“S1”(0x5331)。地址场由2个字节地址来说明。数据场由可载入的数据组成。 S2: 地址长度为3字节的记录。记录类型是“S2”(0x5332)。地址场由3个字节地址来说
实验四 PID控制系统的Simulink
自动控制理论 上 机 实 验 报 告 学院:机电工程学院 班级:13级电信一班 姓名: 学号:
实验四 PID 控制系统的Simulink 仿真分析 一、实验目的和任务 1.掌握PID 控制规律及控制器实现。 2.掌握用Simulink 建立PID 控制器及构建系统模型与仿真方法。 二、实验原理和方法 在模拟控制系统中,控制器中最常用的控制规律是PID 控制。PID 控制器是一种线性控制器,它根据给定值与实际输出值构成控制偏差。PID 控制规律写成传递函数的形式为a s K s Ki K s T s T K s U s E s G d p d i p ++=++==)11()()()( 式中,P K 为比例系数;i K 为积分系数;d K 为微分系数;i p i K K T = 为积分时间常数;p d d K K T =为微分时间常数; 简单来说,PID 控制各校正环节的作用如下: (1)比例环节:成比例地反映控制系统的偏差信号,偏差一旦产生,控制器立 即产生控制作用,以减少偏差。 (2)积分环节:主要用于消除静差,提高系统的无差度。积分作用的强弱取决 于积分时间常数i T ,i T 越大,积分作用越弱,反之则越强。 (3)微分环节:反映偏差信号的变化趋势(变化速率),并能在偏差信号变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减少调节时间。 三、实验使用仪器设备 计算机、MATLAB 软件 四、实验内容(步骤) 1、在MATLAB 命令窗口中输入“simulink ”进入仿真界面。 2、构建PID 控制器:(1)新建Simulink 模型窗口(选择“File/New/Model ”),在Simulink Library Browser 中将需要的模块拖动到新建的窗口中,根据PID 控制器的传递函数构建出如下模型:
FLAC3D5.0模型及输入参数说明
1.1模型参数代码 可参考manual中各个章节的command命令及说明,注意单位。用prop 赋值。 1.1.1各向同性弹性模型
16 ttable 塑性拉应变-抗拉强度的表号 下列参数可以显示、绘图和通过fish访问 1 es_plastic 塑性切应变 2 et_plastic 塑性拉应变 3 ff_count 检测切应变反向的数 4 ff_cvd 体应变,εvd 经典粘弹性模型的材料参数(Classical Viscoelastic (Maxwell Substance)–MODEL mechanical viscous) 1 bulk 弹性体积模量,K 2 shear 弹性剪切模量,G 3 viscosity 动力粘度,η 粘弹性模型的材料参数(Burgers Model –MODEL mechanical burgers) 1 bulk 弹性体积模量,K 2 kshear Kelvin弹性剪切模量,G K 3 kviscosity Kelvin动力粘度,ηK 4 mkshear Maxwell切边模量,G M 5 mviscosity Maxwell动力粘度,ηM 二分幂律模型的材料参数(Power Law –MODEL mechanical power) 1 a_1 常数,A1 2 a_2 常数,A2 3 bulk 弹性体积模量,K 4 n_1 指数,n1 5 n_2 指数,n2 6 rs_1 参考应力,σ1ref 7 rs_2 参考应力,σ2ref 8 shear 弹性剪切模量,G 蠕变模型材料参数(WIPP Model –MODEL mechanical wipp) 1 act_energy 活化能,Q 2 a_wipp 常数,A 3 b_wipp 常数,B 4 bulk 弹性体积模量,K 5 d_wipp 常数,D 6 e_dot_star 临界稳定状态蠕变率, 7 gas_c 气体常数,R 8 n_wipp 指数,n 9 shear 弹性剪切模量,G 10 temp 温度,T 下列参数可以显示、绘图和通过fish访问
DNA芯片技术与SNP分析
DNA芯片技术与SNP分析-------------------------- 摘要: 基因芯片技术作为一种新兴的生物技术,近年来得到迅速发展,其应用具有巨大的潜力。单核苷酸多态性(SNP) 作为新的遗传标记对基因定位及相关疾病研究的意义亦非常重大。本文主要介绍了DNA 芯片技术的原理和分类、单核苷酸多态性检测方法及DNA 芯片技术在单核苷酸多态性检测方面的应用。 生物芯片技术是90 年代初发展起来的,集分子生物学、微电子技术、高分子化学合成技术和计算机科学等于一身的一门新型技术。目前发展的生物芯片种类繁多, 如蛋白质芯片、基因芯片、激素芯片、药物芯片等。但最初的生物芯片主要用于对DNA 的测序, 基因表达谱的鉴定及基因突变体的检测、分析等方面[1 ] 。迄今为止, 使用最多的也是DNA 芯片。DNA 水平遗传多态性标记至今已经历了3 个阶段:限制性酶切片段长度多态性标记(RFLP) 、DNA 重复序列的多态性标记(包括小卫星、微卫星DNA 重复序列) 、单核苷酸多态性标记( single nucleotide polymorphisms , SNPs) [2 ] 。 SNP 具有数量多,分布广泛,易于快速、规模化筛查,便于基因分型等特点。伴随着SNP 检测和分析技术的进一步发展,尤其是与DNA 芯片等技术的结合, SNPs 在基因定位中具有 巨大优势和潜力, 并为DNA芯片应用于遗传作图提供了基础。由于基因芯片具有携带信息量大和检测方便的特点,使得用DNA 芯片对SNP 进行分析具有广阔的前景。DNA 芯片和SNP 分析已日益成为研究功能基因组学的工具。 1 基因芯片 基因芯片的基本原理是应用已知的核苷酸序列作为探针与标记的靶核苷酸序列进行杂交,通过对信号的检测进行定性与定量分析。基因芯片可在一微小的基片(硅片、玻片等) 表面集成大量的分子识别探针,能够在同一时间内平行分析大量基因,进行大信息量的检测分析 [3 ] 。基因芯片应用很广, 根据所用探针类型不同分为cDNA 微阵列(或cDNA微阵列芯片) 和寡核苷酸阵列(或芯片) ,根据应用领域不同而制备的专用芯片如毒理学芯片(toxchip) 、病毒检测芯片(如肝炎病毒检测芯片) 、p53 基因检测芯片等。根据其作用可分为检测基因质和量的芯片。量的检测包括:检测mRNA 水平、病原体的有无及比较基因组基因的拷贝数,既可用寡核苷酸芯片,又可用cDNA 芯片完成,但cDNA 芯片更具优势。质的检测包括:DNA 测序及再测序、基因突变和SNP 检测等,主要用寡核苷酸芯片完成。 2 SNP 单核苷酸多态性(SNP) 是指在基因组上单个核苷酸的变异,包括置换、颠换、缺失和插入。从理论上来看每一个SNP 位点都可以有4 种不同的变异形式,但实际上发生的只有两种,即转换和颠换,二者之比为2 :1。SNP 在CG序列上出现最为频繁,而且多是C转换为T ,原因是CG中的C 常为甲基化的,自发地脱氨后即成为胸腺嘧啶。一般而言,SNP 是指变异频率大于1 %的单核苷酸变异。在人类基因组中大概每1000 个碱基就有一个SNP ,人类基因组上的SNP 总量大概是3 ×106 个[4 ] 。 绝大多数疾病的发生与环境因素和遗传因素的综合作用有关,通常认为是在个体具有遗传易感性的基础上,环境有害因素作用而导致疾病。不同群体和个体对疾病的易感性、抵抗性以及其他生物学性状(如对药物的反应性等) 有差别,其遗传学基础是人类基因组DNA 序列的变异性, 其中最常见的是SNP。易感基因的特点是基因的变异本身并不直接导致疾病的发生,而只造成机体患病的潜在危险性增加,一旦外界有害因素介入, 即可导致疾病发生。另外在药物治疗中,易感基因的变异造成药物对机体的疗效和副作用不同。
PID控制系统的Simulink仿真分析
实验报告 课程名称: MATLAB语言与控制系统仿真 实验项目: PID控制系统的Simulink仿真分析专业班级: 学号: 姓名: 指导教师: 日期: 机械工程实验教学中心
注:1、请实验学生及指导教师实验前做实验仪器设备使用登记; 2、请各位学生大致按照以下提纲撰写实验报告,可续页; 3、请指导教师按五分制(优、良、中、及格、不及格)给出报告成绩; 4、课程结束后,请将该实验报告上交机械工程实验教学中心存档。 一、实验目的和任务 1.掌握PID 控制规律及控制器实现。 2.掌握用Simulink 建立PID 控制器及构建系统模型与仿真方法。 二、实验原理和方法 在模拟控制系统中,控制器中最常用的控制规律是PID 控制。PID 控制器是一种线性控制器,它根据给定值与实际输出值构成控制偏差。PID 控制规律写成传递函数的形式为 s K s Ki K s T s T K s U s E s G d p d i p ++=++==)11()()()( 式中,P K 为比例系数;i K 为积分系数;d K 为微分系数;i p i K K T =为积分时间常数; p d d K K T =为微分时间常数;简单来说,PID 控制各校正环节的作用如下: (1)比例环节:成比例地反映控制系统的偏差信号,偏差一旦产生,控制器立即产 生控制作用,以减少偏差。 (2)积分环节:主要用于消除静差,提高系统的无差度。积分作用的强弱取决于积 分时间常数i T ,i T 越大,积分作用越弱,反之则越强。 (3)微分环节:反映偏差信号的变化趋势(变化速率),并能在偏差信号变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减少调
matlab控制系统仿真课程设计
课程设计报告 题目PID控制器应用 课程名称控制系统仿真院部名称机电工程学院专业 班级 学生姓名 学号 课程设计地点 课程设计学时 指导教师 金陵科技学院教务处制成绩
一、课程设计应达到的目的 应用所学的自动控制基本知识与工程设计方法,结合生产实际,确定系统的性能指标与实现方案,进行控制系统的初步设计。 应用计算机仿真技术,通过在MATLAB软件上建立控制系统的数学模型,对控制系统进行性能仿真研究,掌握系统参数对系统性能的影响。 二、课程设计题目及要求 1.单回路控制系统的设计及仿真。 2.串级控制系统的设计及仿真。 3.反馈前馈控制系统的设计及仿真。 4.采用Smith 补偿器克服纯滞后的控制系统的设计及仿真。 三、课程设计的内容与步骤 (1).单回路控制系统的设计及仿真。 (a)已知被控对象传函W(s) = 1 / (s2 +20s + 1)。 (b)画出单回路控制系统的方框图。 (c)用MatLab的Simulink画出该系统。 (d)选PID调节器的参数使系统的控制性能较好,并画出相应的单位阶约响应
曲线。注明所用PID调节器公式。PID调节器公式Wc(s)=50(5s+1)/(3s+1) 给定值为单位阶跃响应幅值为3。 有积分作用单回路控制系统 无积分作用单回路控制系统
大比例作用单回路控制系统 (e)修改调节器的参数,观察系统的稳定性或单位阶约响应曲线,理解控制器参数对系统的稳定性及控制性能的影响? 答:由上图分别可以看出无积分作用和大比例积分作用下的系数响应曲线,这两个PID调节的响应曲线均不如前面的理想。增大比例系数将加快系统的响应,但是过大的比例系数会使系统有比较大的超调,并产生振荡,使稳定性变坏;增大积分时间有利于减小超调,减小振荡,使系统的稳定性增加,但是系统静差消除时间变长,加入微分环节,有利于加快系统的响应速度,使系统超调量减小,稳定性增加。 (2).串级控制系统的设计及仿真。 (a)已知主被控对象传函W 01(s) = 1 / (100s + 1),副被控对象传函W 02 (s) = 1 / (10s + 1),副环干扰通道传函W d (s) = 1/(s2 +20s + 1)。 (b)画出串级控制系统方框图及相同控制对象下的单回路控制系统的方框图。(c)用MatLab的Simulink画出上述两系统。