OpenGL坐标系介绍
OpenGL的坐标系、投影和几何变换
按:我也是在迷茫中走过来的,初学OpenGL时,略微了解了一些有关变换的基本知识,但是却不知道具体的使用方法,因此经常需要在布置场景时反复调整各种参数。当我终于有一天明白了它们的用法时,就觉得应该把这些心得体会写下来,让那些和我一样曾经迷茫过的人能够迅速地找到出路。本文的读者对象为那些初学OpenGL,了解了一些坐标系、几何变换等基本知识,但是又不知道具体应该如何运用这些操作的人。如果你对OpenGL一无所知,建议你先去学学OpenGL的基本知识。
1 坐标系
OpenGL中使用的坐标系有两种,分别为世界坐标系和屏幕坐标系。世界坐标系即OpenGL内部处理时使用的三维坐标系,而屏幕坐标系即为在计算机屏幕上绘图时使用的坐标系。
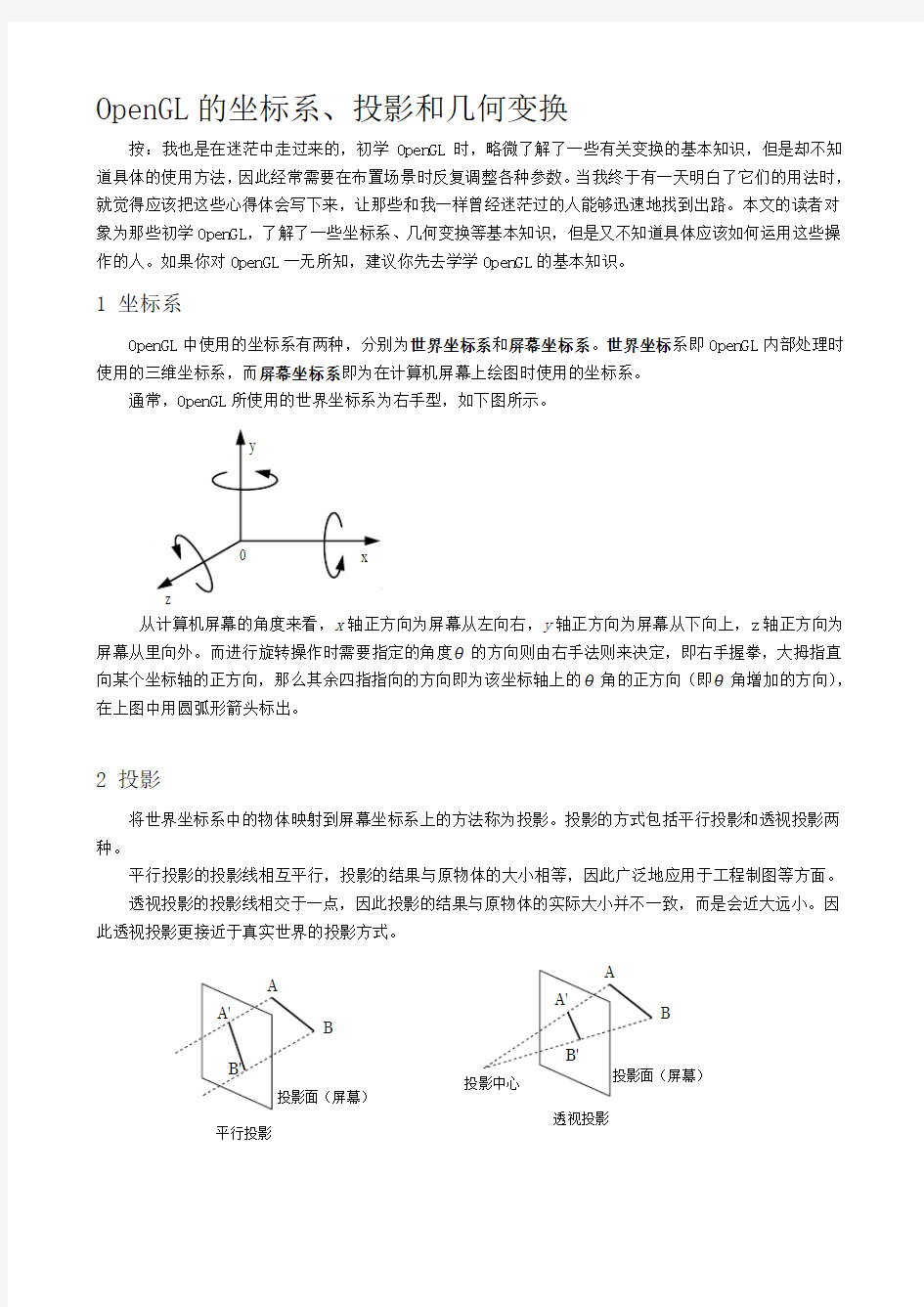
通常,OpenGL所使用的世界坐标系为右手型,如下图所示。
从计算机屏幕的角度来看,x轴正方向为屏幕从左向右,y轴正方向为屏幕从下向上,z轴正方向为屏幕从里向外。而进行旋转操作时需要指定的角度θ的方向则由右手法则来决定,即右手握拳,大拇指直向某个坐标轴的正方向,那么其余四指指向的方向即为该坐标轴上的θ角的正方向(即θ角增加的方向),在上图中用圆弧形箭头标出。
2 投影
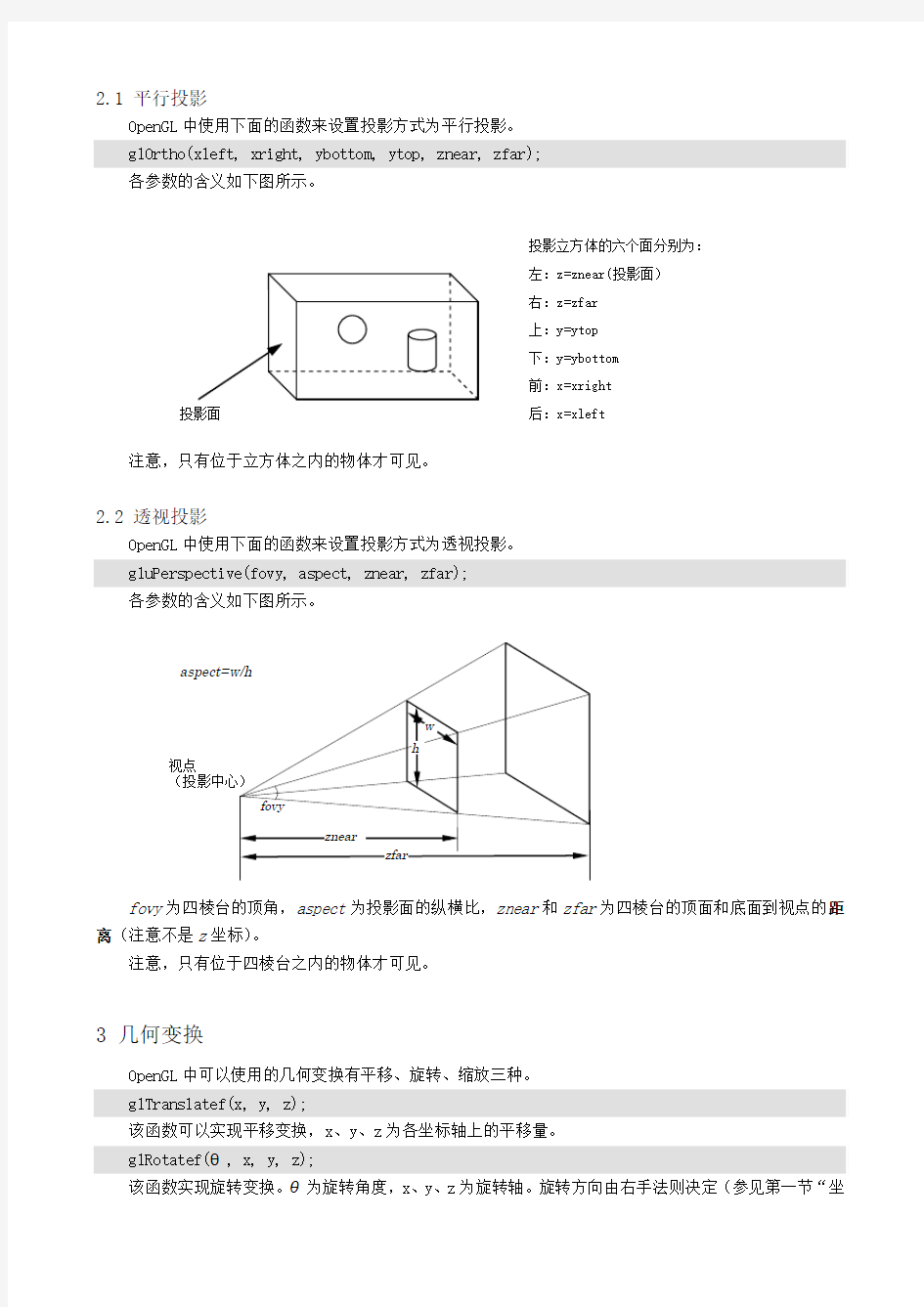
将世界坐标系中的物体映射到屏幕坐标系上的方法称为投影。投影的方式包括平行投影和透视投影两种。
平行投影的投影线相互平行,投影的结果与原物体的大小相等,因此广泛地应用于工程制图等方面。
透视投影的投影线相交于一点,因此投影的结果与原物体的实际大小并不一致,而是会近大远小。因此透视投影更接近于真实世界的投影方式。
B 平行投影
B
透视投影
x
z
y 0
2.1 平行投影
OpenGL 中使用下面的函数来设置投影方式为平行投影。 glOrtho(xleft, xright, ybottom, ytop, znear, zfar); 各参数的含义如下图所示。
注意,只有位于立方体之内的物体才可见。
2.2 透视投影
OpenGL 中使用下面的函数来设置投影方式为透视投影。 gluPerspective(fovy, aspect, znear, zfar); 各参数的含义如下图所示。
fovy 为四棱台的顶角,aspect 为投影面的纵横比,znear 和zfar 为四棱台的顶面和底面到视点的距离(注意不是z 坐标)。
注意,只有位于四棱台之内的物体才可见。
3 几何变换
OpenGL 中可以使用的几何变换有平移、旋转、缩放三种。 glTranslatef(x, y, z);
该函数可以实现平移变换,x 、y 、z 为各坐标轴上的平移量。 glRotatef(θ, x, y, z);
该函数实现旋转变换。θ为旋转角度,x 、y 、z 为旋转轴。旋转方向由右手法则决定(参见第一节
“坐
投影面
投影立方体的六个面分别为: 左:z=znear(投影面) 右:z=zfar 上:y=ytop 下:y=ybottom 前:x=xright
后:x=xleft
标系”)。
glScalef(x, y, z);
该函数实现缩放变换。x 、y 、z 为各轴方向的扩大量。若为负值,则沿着坐标轴的反方向进行缩放。
实际上,几何变换并不是针对坐标系中的某个物体进行变换,而是对整个坐标系进行变换。进行绘图时,世界坐标系上的点将以如下的方式被投影到屏幕坐标系上:
????
??
?
?????=??????? ??11'''12z y x A A A P z y x n 其中(x y z 1)T
为该点在世界坐标系中的坐标,(x' y' z' 1)T
为该点在屏幕坐标系上的投影的坐标。
P 为投影变换矩阵,A n 为几何变换矩阵。在处理变换和投影时,OpenGL 先把几何变换矩阵A 1、A 2、…、A n
从左侧依次与点坐标矩阵相乘,最后再将投影矩阵从左侧与经过几何变换之后的点坐标相乘,即得到该点的屏幕坐标。也就是说,在OpenGL 中进行几何变换的方式为,首先通过glTranslatef 、glRotatef 、glScalef 等函数设置好几何变换矩阵(相当于对坐标系进行了变换),然后再进行绘图,那么图形的投影坐标将受到设置好的几何变换矩阵所影响而显现出几何变换的效果;而并不是首先进行绘图然后再通过几何变换函数对已经存在的图形进行变换。
变换的一般形式如下式所示:
??????
?
??=????
??? ????????? ??=??????? ??111'''4443
42
41
343332312423222114131211z y x A z y x a a a a a a a a a a a a a a a a z y x 常见的变换矩阵如下。 (1)平移变换
????
??
?
?
?100
010*******z y x t t t (2)旋转变换 沿x 轴旋转
???????
?
?-10000cos sin 00sin cos 000
01
x
x
x x θθ
θθ 沿y 轴旋转
??????
? ?
?-10
000cos 0sin 00100sin 0cos y y
y y
θθ
θθ
沿z 轴旋转
??????
?
??-10
00010000cos sin 00
sin cos z
z z z θθθθ (3)缩放变换
??????
? ??1000000000000z y x s s s (4)平行投影(投影到xy 平面的情况)
??????
?
?
?10
0010000100001 (5)透视投影(投影到xy 平面的情况。投影中心为z 轴上的点(0, 0, R))
??
????
?
?
??--100
0000000000z R R z R R
在实际编程中,为了保存几何变换和投影变换的操作,OpenGL 维护两个栈,即投影变换栈和几何变换栈。栈中保存的元素即为投影变换和几何变换的变换矩阵。使用下面的函数可以在两个栈之间进行切换:
切换当前操作的栈为投影变换栈:glMatrixMode(GL_PROJECTION); 切换当前操作的栈为几何变换栈:glMatrixMode(GL_MODELVIEW);
此外,下面的函数可以清除当前操作的栈中的内容,并向栈中压入一个单位矩阵: glLoadIdentity();
两个栈之间的关系如下图所示:
一般情况下,我们在进行OpenGL 初始化时都要执行下面的命令: glMatrixMode(GL_PROJECTION);
// 切换到投影变换栈
投影变换栈
=??????
? ??1'''z y x ×
几何变换栈
× ???
???
? ??1z y x
glLoadIdentity(); // 初始化投影变换栈
gluPrespective(30.0, aspect, 1.0, 50.0); // 压入透视投影矩阵
glMatrixMode(GL_MODELVIEW); // 切换到几何变换栈
另外,在调用glMatrixMode(GL_MODELVIEW)时,系统会自动将几何变换栈清空并压入单位矩阵,因此不必再调用glLoadIdentity()函数。
对于几何变换栈,还有以下两个常用的操作:
glPushMatrix(); // 保存当前坐标系
glPopMatrix(); // 恢复当前坐标系
在调用几何变换操作时,OpenGL将该几何变换操作的变换矩阵与当前栈的栈顶元素相乘,得到一个新的矩阵并将其作为几何变换栈的栈顶。
作为例子,我们来看下面的这段程序。
glMatrixMode(GL_PROJECTION);
glLoadIdentity();
gluPerspective(30.0, aspect, 1.0, 50.0);
glMatrixMode(GL_MODELVIEW);
glPushMatrix();
glTranslatef(0.0, 0.0, -20.0);
glPushMatrix();
glTranslatef(0.0, 1.0, 0.0);
myWireCylinder(1.0, 2.0, 12);
glTranslatef(0.0, 1.0, 0.0);
glRotatef(-90.0, 1.0, 0.0, 0.0);
glutWireCone(1.0, 2.0, 12, 3);
glPopMatrix();
glTranslatef(0.0, -1.0, 0.0);
myWireCylinder(1.0, 2.0, 12);
glPopMatrix();
下面我们来分析一下该程序执行过程中两个栈的变化情况。图中左侧的栈为透视变换栈,右侧的栈为几何变换栈。黄色表示当前操作栈。I表示单位矩阵,P表示投影变换矩阵,T为平移变换矩阵,R为旋转变换矩阵,S为缩放变换矩阵。
4 参考文献
OpenGLによる3次元CGプログラミング,林武文、加藤清敬著,コロナ社
我国四大常用坐标系及高程坐标系学习资料
我国四大常用坐标系及高程坐标系 1.北京54坐标系(BJZ54) 北京54坐标系为参心大地坐标系,大地上的一点可用经度L54、纬度M54和大地高H54定位,它是以克拉索夫斯基椭球为基础,经局部平差后产生的坐标系。 新中国成立以后,我国大地测量进入了全面发展时期,再全国范围内开展了正规的,全面的大地测量和测图工作,迫切需要建立一个参心大地坐标系。由于当时的“一边倒”政治趋向,故我国采用了前苏联的克拉索夫斯基椭球参数,并与前苏联1942年坐标系进行联测,通过计算建立了我国大地坐标系,定名为1954年北京坐标系。因此,1954年北京坐标系可以认为是前苏联1942年坐标系的延伸。它的原点不在北京而是在前苏联的普尔科沃。 北京54坐标系,属三心坐标系,长轴6378245m,短轴6356863,扁率1/298.3; 2.西安80坐标系 1978年4月在西安召开全国天文大地网平差会议,确定重新定位,建立我国新的坐标系。为此有了1980年国家大地坐标系。1980年国家大地坐标系采用地球椭球基本参数为1975年国际大地测量与地球物理联合会第十六届大会推荐的数据,即IAG75地球椭球体。该坐标系的大地原点设在我国中部的陕西省泾阳县永乐镇,位于西安市西北方向约60公里,故称1980年西安坐标系,又简称西安大地原点。基准面采用青岛大港验潮站1952-1979年确定的黄海平均海水面(即1985国家高程基准)。 西安80坐标系,属三心坐标系,长轴6378140m,短轴6356755,扁率1/298.25722101 3.WGS-84坐标系 WGS-84坐标系(WorldGeodeticSystem)是一种国际上采用的地心坐标系。坐标原点为地球质心,其地心空间直角坐标系的Z轴指向国际时间局(BIH)1984.0定义的协议地极(CTP)方向,X轴指向BIH1984.0的协议子午面和CTP赤道的交点,Y轴与Z轴、X轴垂直构成右手坐标系,称为1984年世界大地坐标系。这是一个国际协议地球参考系统(ITRS),
国家坐标系与地方独立坐标系坐标转换方法与计算
国家坐标系与地方独立坐标系坐标转换方法与计算 作者姓名:岳雪荣 学号: 20142202001 系(院)、专业:建筑工程学院、测绘工程14-1 2016 年 6 月 6 日
国家坐标系与地方独立坐标系坐标转换方法与计算 (建筑工程学院14测绘工程专业) 摘要 随着我国经济的发展的突飞猛进,对测量精度要求的建设也越来越高,就是以便满足实际运行要求。但在一些城市或大型工程建设中可能刚好在两个投影带的交界处,布设控制网时如果按照标准的3度或者1.5度带投影,投影变形会非常大,给施工作业带来不便,此时需要建立地方独立坐标系。认识国家坐标系的转换和地方独立坐标系统有一定的现实意义,如何实现两者的换算,一直是关注的工程建设中的热点问题。因此,完成工程测量领域国家坐标定位成果与地方独立坐标成果的转换问题,以适应城市化和实际工程的需要。 关键词:国家坐标;独立坐标;坐标转换
目录 1绪论 1.1背景和意义 1.2主要内容 1.3解决思路和方法 2 建立独立坐标系的方法3 2.1常用坐标系统的方法介绍 2.2确定独立坐标系的三大要素9 2.3减少长度变形的方法10 2.4建立独立坐标系的意义12 3 国家坐标系与地方坐标系的坐标转换13 3.1常用坐标系的坐标转换模型13 3.2投影面与中央子午线及椭球参数的确定14 3.3国家坐标与地方坐标的转换思路15 4算例分析17 结论20 参考文献错误!未定义书签。
1绪论 1.1背景和意义 随着社会的经济快速发展,尤其是近十多年来空间测量技术突飞猛进,得到了长足的发展,其精度也大幅提高。从测量的发展史来看,从简单到复杂,从人工操作到测量自动化、一体化,从常规精度测量到高精度测量,促使大地坐标系有参心坐标系到大地坐标系的转化和应用。大地测量工作已有传统的二维平面坐标向三位立体空间坐标转化,逐步形成四维空间坐标系统。 在测绘中,地方独立坐标系和国家坐标系为平面坐标系的两种坐标系统。对于工程测量和城市建设过程,建设区域不可能都有合适的投影子午线,势必可能有所差异,这样一来作业区域的高程和坐标或者是工程关键区域的高程和坐标能够与国家大地基准的参考椭球有较大的出入,在这种情况下,根据不同的投影区国家坐标系统,可能就会出现投影变形导致严重错误。建立地方独立坐标系统来降低高程归化影响和是归化投影变形,误差控制在一个小范围的数据计算和实际大致相符,不需要任何修改,从而可以满足工程建设和实际应用。 就当前而言,测量工作重要的触及应用三种常用的大地坐标系统,即为地方独立坐标系,地心坐标系,参心坐标系 [1]。地心坐标系:以地球质心为根据建立的坐标系,包括CGCS2000国家大地坐标系,GPS平差后的WGS-84坐标系等。参心坐标系:参心坐标系是以参考椭球为基准的大地坐标系,包括54北京坐标系和80西安坐标系等。独立坐标系:以自己情况而定的独立坐标,采用新椭球,投影到高斯平面上,计算参数,在结合相关数据解算得到,如城市建设坐标系。它们统称为地固坐标系统。有机结合在一起对于整个坐标系统来说具有很大的应用价值,解决了实际生活中各种的工程测量问题,如土地申报工程,矿产调查工程,全国土地调查工程等等。根据现在的经济建设情况,我们应该结合实际,展开建立国家大地坐标与地方独立坐标的研究工作是非常必要的。这一点也是目前需要解决的问题。 为了更方面的需求和发展,也使得更好地创建国家坐标系与地方独立坐标系的关系。在这里引入了”GPS坐标”这个概念。在这里我们用以工程测量,成为大型工程建设控制网和城建控制网的主要手段。基以GPS坐标系建立的精度高的独立坐标系,将方便于GPS较高精确的、高效的获取城建坐标和高程需求,有利于GPS与GIS的有机结合,进一步提升城市的综合能力,加速城市的现代化建设,对工程建设具有巨大的辅助作用[2]。根据GPS坐标系建立的地方独立坐标系是未来的希望。
《平面直角坐标系》全章复习与巩固(基础)知识讲解
《平面直角坐标系》全章复习与巩固(基础)知识讲解 责编:杜少波 【学习目标】 1. 理解平面直角坐标系及象限的概念,并会在坐标系中根据点的坐标描出点的位置、由点的位置写出它的坐标; 2. 掌握用坐标系表示物体位置的方法及在物体平移变化前后点坐标的变化; 3. 通过学习平面直角坐标系的基础知识,逐步理解平面内的点与有序实数对之间的一一对应关系,进而培养数形结合的数学思想. 【知识网络】 【要点梳理】 要点一、有序数对 把一对数按某种特定意义,规定了顺序并放在一起就形成了有序数对,人们在生产生活中经常以有序数对为工具表达一个确定的意思,如某人记录某个月不确定周期的零散收入,可用(13,2000), (17,190), (21,330)…,表示,其中前一数表示日期,后一数表示收入,但更多的人们还是用它来进行空间定位,如:(4,5),(20,12),(13,2),…,用来表示电影院的座位,其中前一数表示排数,后一数表示座位号. 要点二、平面直角坐标系 在平面内画两条互相垂直、原点重合的数轴就组成平面直角坐标系,如下图:
要点诠释: (1)坐标平面内的点可以划分为六个区域:x轴,y轴、第一象限、第二象限、第三象限、第四象限,这六个区域中,除了x轴与y轴有一个公共点(原点)外,其他区域之间均没有公共点. (2)在平面上建立平面直角坐标系后,坐标平面上的点与有序数对(x,y)之间建立了一一对应关系,这样就将‘形’与‘数’联系起来,从而实现了代数问题与几何问题的转化. (3)要熟记坐标系中一些特殊点的坐标及特征: ① x轴上的点纵坐标为零;y轴上的点横坐标为零. ②平行于x轴直线上的点横坐标不相等,纵坐标相等; 平行于y轴直线上的点横坐标相等,纵坐标不相等. ③关于x轴对称的点横坐标相等,纵坐标互为相反数; 关于y轴对称的点纵坐标相等,横坐标互为相反数; 关于原点对称的点横、纵坐标分别互为相反数. ④象限角平分线上的点的坐标特征: 一、三象限角平分线上的点横、纵坐标相等; 二、四象限角平分线上的点横、纵坐标互为相反数. 注:反之亦成立. (4)理解坐标系中用坐标表示距离的方法和结论: ①坐标平面内点P(x,y)到x轴的距离为|y|,到y轴的距离为|x|. ② x轴上两点A(x1,0)、B(x2,0)的距离为AB=|x1 - x2|; y轴上两点C(0,y1)、D(0,y2)的距离为CD=|y1 - y2|. ③平行于x轴的直线上两点A(x1,y)、B(x2,y)的距离为AB=|x1 - x2|; 平行于y轴的直线上两点C(x,y1)、D(x,y2)的距离为CD=|y1 - y2|. (5)利用坐标系求一些知道关键点坐标的几何图形的面积:切割、拼补. 要点三、坐标方法的简单应用 1.用坐标表示地理位置 (1)建立坐标系,选择一个适当的参照点为原点,确定x轴、y轴的正方向; (2)根据具体问题确定适当的比例尺,在坐标轴上标出单位长度; (3)在坐标平面内画出这些点,写出各点的坐标和各个地点的名称. 要点诠释: (1)我们习惯选取向东、向北分别为x轴、y轴的正方向,建立坐标系的关键是确定原点 的位置. (2)确定比例尺是画平面示意图的重要环节,要结合比例尺来确定坐标轴上的单位长度.2.用坐标表示平移 (1)点的平移 点的平移引起坐标的变化规律:在平面直角坐标中,将点(x,y)向右(或左)平移a个单位长度,可以得到对应点(x+a,y)(或(x-a,y));将点(x,y)向上(或下)平移b个单位长度,
我国地理数据常用的坐标系
我国地理数据常用的坐标系 我国三大常用坐标系区别(北京54、西安80和WGS-84) Gis应用2009-09-27 10:06 阅读13 评论0 字号:大大中中小小我国三大常用坐标系区别(北京54、西安80和WGS-84) 1、北京54坐标系(BJZ54) 北京54坐标系为参心大地坐标系,大地上的一点可用经度L54、纬度M54和大地高H54定位,它是以克拉索夫斯基椭球为基础,经局部平差后产生的坐标系。1954年北京坐标系的历史: 新中国成立以后,我国大地测量进入了全面发展时期,再全国范围内开展了正规的,全面的大地测量和测图工作,迫切需要建立一个参心大地坐标系。由于当时的“一边倒”政治趋向,故我国采用了前苏联的克拉索夫斯基椭球参数,并与前苏联1942年坐标系进行联测,通过计算建立了我国大地坐标系,定名为1954年北京坐标系。因此,1954年北京坐标系可以认为是前苏联1942年坐标系的延伸。它的原点不在北京而是在前苏联的普尔科沃。 北京54坐标系,属三心坐标系,长轴6378245m,短轴6356863,扁率1/298.3; 2、西安80坐标系 1978年4月在西安召开全国天文大地网平差会议,确定重新定位,建立我国新的坐标系。为此有了1980年国家大地坐标系。1980年国家大地坐标系采用地球椭球基本参数为1975年国际大地测量与地球物理联合会第十六届大会推荐的数据,即IAG 75地球椭球体。该坐标系的大地原点设在我国中部的陕西省泾阳县永乐镇,位于西安市西北方向约60公里,故称1980年西安坐标系,又简称西安大地原点。基准面采用青岛大港验潮站1952-1979年确定的黄海平均海水面(即1985国家高程基准)。 西安80坐标系,属三心坐标系,长轴6378140m,短轴6356755,扁率 1/298.25722101 3、WGS-84坐标系 WGS-84坐标系(World Geodetic System)是一种国际上采用的地心坐标系。坐标原点为地球质心,其地心空间直角坐标系的Z轴指向国际时间局(BIH)1984.0定义的协议地极(CTP)方向,X轴指向BIH1984.0的协议子午面和CTP 赤道的交点,Y轴与Z轴、X轴垂直构成右手坐标系,称为1984年世界大地坐标系。这是一个国际协议地球参考系统(ITRS),是目前国际上统一采用的大地坐标系。GPS广播星历是以WGS-84坐标系为根据的。 WGS84坐标系,长轴6378137.000m,短轴6356752.314,扁率 1/298.257223563。 由于采用的椭球基准不一样,并且由于投影的局限性,使的全国各地并不存在一至的转换参数。对于这种转换由于量较大,有条件的话,一般都采用GPS联测已知点,应用GPS软件自动完成坐标的转换。当然若条件不许可,且有足够的重合点,也可以进行人工解算。
RTK测量中独立坐标系的建立
R T K测量中独立坐标系的建立 RTK测量中独立坐标系的建立 摘要:介绍GPS-RTK测量中WGS-84大地坐标系与独立坐标系转换的方法及南方测绘工程之星数据处理中坐标转换的方法,同时结合工程实例予以验证。 关键词:GPS-RTK测量;WGS-84大地坐标系;独立坐标系;坐标转换 1 引言 在水利工程测量中,多数情况下工程所处位置地形复杂,交通不便,通视条件较差,采用以经纬仪、全站仪测量为代表的常规测量常常效率低下。随着GPS-RTK测量系统的使用,由于它具有观测速度快,定位精度高,经济效益高等特点,现在我院多数水利工程测量都是采用RTK测量技术来完成。对于GPS-RTK系统来说,由于它采用的是WGS-84固心坐标系,而在实际工程应用中,由于顾及长度变形、高程异常等影响而采用独立坐标系,这就需要将RTK测量采集的数据在两坐标系中进行转换。 2 国家坐标系及独立坐标系的建立 2.1 国家坐标系的建立 在我国,由于历史原因先后采用不同的参考椭球体和大地起算数据而形成多个国家坐标系,主要国家坐标系有1954北京坐标系、1980西安坐标系、2000国家坐标系和WGS-84坐标系。前两个是参心坐标系,后两个是固心坐标系。由于他们采用不同的椭球体参数,所以地面上同一个点在不同的坐标系中有不同的坐标值。 国家坐标系的主要作用是在全国建立一个统一的平面和高程基准,为发展国民经济、空间技术及国防建设提供技术支撑,也为防灾、减灾、环境监测及当代地球科学研究提供基础资料。 2.2 独立坐标系的建立
在工程应用中,由于起算数据收集困难、测区远离中央子午线及满足特殊要求等诸多原因,如在水利工程测量中,常要测定或放样水工建筑物的精确位置,要计算料场的土石方贮量和水库的库容。规范要求投影长度变形不大于一定的值(如《工程测量规范》为2.5cm/km,《水利水电工程测量规范(规范设计阶段)》为5.0cm/km)。如果采用国家坐标系统在许多情况下(如高海拔地区、离中央子午线较远地方等)不能满足这一要求,这就要求建立地方独立坐标系。 在常规测量中,这种独立坐标系只是一种高斯平面直角坐标系,而在采用GPS-RTK采集数据时,独立坐标系就是一种不同于国家坐标系的参心坐标系。 跟国家坐标系一样,建立独立坐标要确定的主要元素有:坐标系的起算数据、中央子午线、参考椭球体参数及投影面高程等。对于起算数据,可以采用国家坐标系的坐标和方位角或任意假设坐标和方位角。在RTK测量中,我们常采用基线的某一端点的单点定位解作为起点,然后以另一点定向,用测距仪测出基线边长,经改正后算出基线端点的坐标;中央子午线常采用测区中央的子午线;投影面常采用测区的平均高程面。参考椭球体一般是基于原来的参考椭球体做某种改动,使改变后的参考椭球面与投影面拟合最好,投影变形可以减到最小,也便于与国家坐标系统进行换算。 3 坐标系的转换 GPS-RTK接收机采集的坐标数据是基于WGS-84椭球下的大地坐标,而我们经常使用的独立坐标系是基于某种局部椭球体下的平面直角坐标,这两种坐标是不同坐标基准下的两种表现形式。利用WGS-84下的大地坐标来推求独立坐标系中的平面直角坐标,必然要求得两坐标系之间转换参数。求取转换参数的基本思路是利用两坐标系中必要个数的公共点,根据相应的椭球参数及中央子午线采用最小二乘法严密平差解算转换参数,具体操作是由转换模型把不同坐标基准下的坐标转换为同基准下的不同坐标形式,再进行同基准下不同坐标形式的转换,从而得到所要的独立坐标系中的平面直角坐标。转换的难点是WGS-84椭球与独立坐标系局部椭球的变换。 3.1 常用的坐标转换方法
工件坐标系讲解学习
工件坐标系
工件坐标系 工件坐标系是固定于工件上的笛卡尔坐标系,是编程人员在编制程序时用来确定刀具和程序起点的,该坐标系的原点可使用人员根据具体情况确定,但坐标轴的方向应与机床坐标系一致并且与之有确定的尺寸关系。 工件坐标系( Workpiece Coordinate System )固定于工件上的笛卡尔坐标系。于加工工件而使用的坐标系,称为工件坐标系。当工件在机床上固定以后,工件原点与机床原点也就有了确定的位置关系,即两坐标原点的偏差就已确定。这就要测量工件原点与机床原点之间的距离。这个偏差值通常是由机床操作者在手动操作下,通过工件测量头或碰刀的方式测量的。该测量值可以预存在数控系统内或编写在加工程序中,在加工时工件原点与机床原点的偏差值便自动加到工件坐标系上,使数控系统按照机床坐标系确定工件的坐标值,实现零件的自动加工。 加工开始时首先要设定工件坐标系:用G54~G59可选择工件坐标系;TXXXX可以通过刀具偏置来实现工件坐标系偏移;G92(G5O)指令可设定工件坐标系。这几种方法均可建立起工件坐标系。 1、G54~G59选择工件坐标系 使用G54,---G59指令可以在预设的工件坐标系中选择一个作为当前工件坐标系。这六个工件坐标系的坐标原点在机床坐标系中的坐标值(称为零点偏置值),必须在程序运行前,从“零点偏置”界面输入。一般多用于需要建立不止一个工件坐标系的场合。选择好工件坐标系后,若更换刀具,则结合刀具长度补偿指令变换Z向坐标即可。不必更换工件坐标系。 2 、TXXXX工件坐标系偏置 TXXXX可以在选择刀具的同时调用该刀具的偏置值。类似于G54----G59的使用,使用前需在相应的位置偏置处输入对刀值。T代码前两位数字代表刀位号,后两位代表数据偏置号。数据偏置号一般为0至99,也就是说可以进行最多100个数值设置一一相当于建立100个工件坐标系。使用起来无限制。 3、 G92(G50)设置工件坐标系 G92一般为数控铣床及加工中心设定工件坐标系指令。G50为数控车床设定工件坐标系指令。使用该指令工件坐标系的原点可设定在相对于刀具起始点的某一符合加工要求的空间
我国三大常用坐标系区别
我国三大常用坐标系区别 (北京54、西安80和WGS-84) 北京, 西安, 坐标系 我国三大常用坐标系区别(北京54、西安80和WGS-84) Gis应用2009-09-27 10:06 阅读13 评论0 字号:大大中中小小我国三大常用坐标系区别(北京54、西安80和WGS-84) 1、北京54坐标系(BJZ54) 北京54坐标系为参心大地坐标系,大地上的一点可用经度L54、纬度M54和大地高H54定位,它是以克拉索夫斯基椭球为基础,经局部平差后产生的坐标系。1954年北京坐标系的历史: 新中国成立以后,我国大地测量进入了全面发展时期,再全国范围内开展了正规的,全面的大地测量和测图工作,迫切需要建立一个参心大地坐标系。由于当时的“一边倒”政治趋向,故我国采用了前苏联的克拉索夫斯基椭球参数,并与前苏联1942年坐标系进行联测,通过计算建立了我国大地坐标系,定名为1954年北京坐标系。因此,1954年北京坐标系可以认为是前苏联1942年坐标系的延伸。它的原点不在北京而是在前苏联的普尔科沃。 北京54坐标系,属三心坐标系,长轴6378245m,短轴6356863,扁率1/298.3; 2、西安80坐标系 1978年4月在西安召开全国天文大地网平差会议,确定重新定位,建立我国新的坐标系。为此有了1980年国家大地坐标系。1980年国家大地坐标系采用地球椭球基本参数为1975年国际大地测量与地球物理联合会第十六届大会推荐的数据,即IAG 75地球椭球体。该坐标系的大地原点设在我国中部的陕西省泾阳县永乐镇,位于西安市西北方向约60公里,故称1980年西安坐标系,又简称西安大地原点。基准面采用青岛大港验潮站1952-1979年确定的黄海平均海水面(即1985国家高程基准)。 西安80坐标系,属三心坐标系,长轴6378140m,短轴6356755,扁率1/298.25722101 3、WGS-84坐标系 WGS-84坐标系(World Geodetic System)是一种国际上采用的地心坐标系。坐标原点为地球质心,其地心空间直角坐标系的Z轴指向国际时间局(BIH)1984.0定义的协议地极(CTP)方向,X轴指向BIH1984.0的协议子午面和CTP赤道的交点,Y轴与Z轴、X轴垂直构成右手坐标系,称为1984年世界大地坐标系。这是一个国际协议地球参考系统(ITRS),是目前国际上统一采用的大地坐标系。GPS广播星历是以WGS-84坐标系为根据的。 WGS84坐标系,长轴6378137.000m,短轴6356752.314,扁率1/298.257223563。 由于采用的椭球基准不一样,并且由于投影的局限性,使的全国各地并不存在一至的转换参数。对于这种转换由于量较大,有条件的话,一般都采用GPS联测已知点,应用GPS软件自动完成坐标的转换。当然若条件不许可,且有足够的重合点,也可以进行人工解算。 附: 我国常用高程系
不同类型地图使用的投影与坐标系
不同类型地图使用的投影与坐标系 (2016-08-12 15:29:29) 不同类型地图使用的投影与坐标系 1.概念辨析 地图投影跟大地坐标系是完全两个东西,尽管具有相关性。地球椭球体则是另一个东西。实际上地图编绘涉及三个基本的东西:椭球体、地图投影、大地坐标系。三者密切关联。(百科知识) 要绘制地图,首先考虑用什么椭球体,这是投影和坐标系的基础——我国三代坐标系使用三种椭球体。 三者之间的关系:先有个椭球体,然后是投影到承影面,然后是添加经纬网。椭球体是基础,投影是转换函数,是数学关系,大地坐标系是参照系。因此,同一椭球体可以用不同的投影;而同一投影,也可以用不同的大地坐标系。 但是一般三者是协调一致的,如我国的三代坐标系,有对应的椭球体、投影类型、基准面(坐标系)。 从地图反映地球表面来看,整个过程涉及五个环节:地球~椭球体~投影~坐标系~地图。而地球是球面的,是一个曲面,而地图是平面的,二者的结构性矛盾,导致我们不得不采用一系列转换,这个转换中不可避免地产生扭曲、变形和误差。具体关系:总结:地球(地球表面,存在高低起伏)→椭球体(光滑球面,相关参数)→投影(投影方式:几何投影与解析投影)→坐标系(地理坐标系与平面直角坐标系)→地图。 2. 我国三代坐标系 我们经常给影像投影时用到的北京54、西安80和2000坐标系是投影直角坐标系,如下表所示为国内坐标系采用的主要参数。从中可以看到我们通常称谓的北京54坐标系、西安80坐标系实际上指的是我国的大地基准面。 表:北京54、西安80和2000坐标系参数列表 坐标名称投影类型椭球体基准面 北京54Gauss Kruger (Transverse Mercator) Krasovsky D_Beijing_1954 西安80Gauss Kruger (Transverse Mercator) IAG75D_Xian_1980 CGCS2000Gauss Kruger CGCS2000D_China_2000
ArcGIS中坐标系统详解
ArcGIS的地理坐标系与大地坐标系 一直以来,总有很多朋友针对地理坐标系、大地坐标系这两个概念吃不透。近日,在网上看到一篇文章介绍它们,非常喜欢。所以在此转发一下,希望能够对制图的朋友们有所帮助。 地理坐标:为球面坐标。参考平面地是椭球面,坐标单位:经纬度 大地坐标:为平面坐标。参考平面地是水平面,坐标单位:米、千米等 地理坐标转换到大地坐标的过程可理解为投影。(投影:将不规则的地球曲面转换为平面) 在ArcGIS中预定义了两套坐标系:地理坐标系(Geographic coordinate system)投影坐标系(Projected coordinate system) 1、首先理解地理坐标系(Geographic coordinate system),Geographic coordinate system直译为地理坐标系统,是以经纬度为地图的存储单位的。很明显,Geographic coordinate syst em是球面坐标系统。我们要将地球上的数字化信息存放到球面坐标系统上,如何进行操作呢?地球是一个不规则的椭球,如何将数据信息以科学的方法存放到椭球上?这必然要求我们找到这样的一个椭球体。这样的椭球体具有特点:可以量化计算的。具有长半轴,短半轴,偏心率。以下几行便是Krasovsky_1940椭球及其相应参数。Spheroid: Krasovsky_1940 Semimajor Axis: 6378245.000000000000000000 Semiminor Axis: 6356863.018773047300000000 Inverse Flattening(扁率): 298.300000000000010000 然而有了这个椭球体以后还不够,还需要一个大地基准面将这个椭球定位。在坐标系统描述中,可以看到有这么一行: Datum: D_Beijing_1954表示,大地基准面是D_Beijing_1954。 -------------------------------------------------------------------------------- 有了Spheroid和Datum两个基本条件,地理坐标系统便可以使用。 完整参数: Alias: Abbreviation:
我国四大常用坐标系及高程坐标系
我国四大常用坐标系及高程坐标系 1、北京54坐标系(BJZ54) 北京54坐标系为参心大地坐标系,大地上的一点可用经度L54、纬度M54和大地高H54定位, 它是以克拉索夫斯基椭球为基础,经局部平差后产生的坐标系。 新中国成立以后,我国大地测量进入了全面发展时期,再全国范围内开展了正规的,全面的大 地测量和测图工作,迫切需要建立一个参心大地坐标系。由于当时的“一边倒”政治趋向,故我国采用了前苏联的克拉索夫斯基椭球参数,并与前苏联1942年坐标系进行联测,通过计算建立了我 国大地坐标系,定名为1954年北京坐标系。因此,1954年北京坐标系可以认为是前苏联1942年坐标系的延伸。它的原点不在北京而是在前苏联的普尔科沃。 北京54坐标系,属三心坐标系,长轴6378245m短轴6356863,扁率1/298.3 ; 2、西安80坐标系 1978年4月在西安召开全国天文大地网平差会议,确定重新定位,建立我国新的坐标系。 为此有了1980年国家大地坐标系。1980年国家大地坐标系采用地球椭球基本参数为1975年国际大地测量与地球物理联合会第十六届大会推荐的数据,即IAG75地球椭球体。该坐标系的大地原点设在我国中部的陕西省泾阳县永乐镇,位于西安市西北方向约60公里,故称1980年西安坐 标系,又简称西安大地原点。基准面采用青岛大港验潮站1952- 1979年确定的黄海平均海水面(即1985国家高程基准)。 西安80坐标系,属三心坐标系,长轴6378140m短轴6356755,扁率1/298.25722101 3、W G-84坐标系 WG—84坐标系(WorldGeodeticSystem )是一种国际上采用的地心坐标系。坐标原点为地球质心,其地心空间直角坐标系的Z轴指向国际时间局(BIH)1984.0定义的协议地极(CTP方向,X轴指向BIH1984.0的协议子午面和CTP赤道的交点,丫轴与Z轴、X轴垂直构成右手坐标系,称为1984年世界大地坐标系。这是一个国际协议地球参考系统(ITRS),是目前国际上统一采用的大地坐标系。GPS^播星历是以WGS-84坐标系为根据的。 WGS8坐标系,长轴6378137.000m,短轴6356752.314,扁率1/298.257223563。 由于采用的椭球基准不一样,并且由于投影的局限性,使的全国各地并不存在一至的转换参数。对于这种转换由于量较大,有条件的话,一般都采用GPS联测已知点,应用GPS软件自动完成坐标的转换。当然若条件不许可,且有足够的重合点,也可以进行人工解算。 4、2000国家大地坐标系 英文缩写为CGCS200O 2000国家大地坐标系是全球地心坐标系在我国的具体体现,其原点为包括海洋和大气的整个地球的质量中心。2000国家大地坐标系采用的地球椭球参数如下:长半轴a=6378137m 扁率f=1/298.257222101, 地心引力常数GM=3.986004418< 1014m3s2 自转角速度3 =7.292115 < 10-5rads-1 我国常用高程系 “ 1956年黄海高程系”,是在1956年确定的。它是根据青岛验潮站1950年到1956年的黄海验潮资料,求出该站验潮井里横按铜丝的高度为 3.61米,所以就确定这个钢丝以下3.61米处为黄海平均海水面。从这个平均海水面起,于1956年推算出青岛水准原点的高程为72.289米。 国家85高程基准其实也是黄海高程基准,只不过老的叫“1956年黄海高程系统”,新的叫“ 1985国家高程基准”,新的比旧的低0.029m 我国于1956年规定以黄海(青岛)的多年平均海平面作为统一基面,为中国第一个国家高程系
地方独立坐标系的建立
地方独立坐标系的建立 2006年第2期地方独立坐标系的建立43 地方独立坐标系的建立 张胜利 (水利部陕西水利电力勘测设计研究院测绘总队陕西西安710002) 摘要坐标系统是所有测量工作的基础,它影响到测量成果的正确性和可靠性,对 于不同的测量工作选择恰当的独立坐标系能保证工程项目顺利实施.本文介绍了建 立独立坐标系的几种方法,并对其优缺点进行分析. 关键词独立坐标系;高斯投影;抵偿高程面;高程归化面 1引言 在工程建设地区布设测量控制网时,其成果不仅要满足大比例尺地形图测图的需要,还要 满足一般工程放样的需要.施工放样时要求控制网中两点的实测长度与由坐标返算的长度应 尽可能相符,而采用国家坐标系其坐标成果大多数情况下是无法满足这些要求的,这是因为国 家坐标系每个投影带都是按一定间隔(6.或3.)划分,其高程归化面为参考椭球面,工程建设所
在地区不可能正好落在国家坐标系某一投影带中央附近,其地面位置也与参考椭球面有一定 距离,这两项将产生高程归化改正和高斯投影变形改正,经过这两项改正后的长度不可能与实 测长度相等. 《工程测量规范》(GB5oo26--93)规定:平面控制网的坐标系统,应满足测区内高程归化改 正和高斯投影变形改正之代数和(即投影长度变形值)不大于2.5cm/km,即相对误差小于1/4 万.当测区的国家坐标系不能满足这一规定时,就要建立地方独立坐标系以减小投影长度变 形产生的影响,将它们的影响控制在微小的范围内,使计算出的长度在实际利用时不需作任何 改算. 2高程归化改正与高斯投影变形改化的计算 地面观测边长的归算可分为高程归化和高斯投影长度改化,其计算公式如下: (1)地面观测边长归算到参考椭球面上的长度归算公式 S—D十,:一—DH=(1) 式中:S——归化到参考椭球圆上的长度; D——地面上的观测长度; ——
初中数学平面直角坐标系(提高)知识讲解(附答案)
平面直角坐标系(提高)知识讲解 【学习目标】 1.理解平面直角坐标系概念,能正确画出平面直角坐标系. 2.能在平面直角坐标系中,根据坐标确定点,以及由点求出坐标,掌握点的坐标特征. 3.由数轴到平面直角坐标系,渗透类比的数学思想. 【要点梳理】 要点一、有序数对 定义:把有顺序的两个数a与b组成的数对,叫做有序数对,记作(a,b). 要点诠释: 有序,即两个数的位置不能随意交换,(a,b)与(b,a)顺序不同,含义就不同,如电影院的座位是6排7号,可以写成(6,7)的形式,而(7,6)则表示7排6号. 要点二、平面直角坐标系及点的坐标的概念 1. 平面直角坐标系 在平面内画两条互相垂直、原点重合的数轴就组成平面直角坐标系.水平的数轴称为x 轴或横轴,习惯上取向右为正方向;竖直的数轴称为y轴或纵轴,取向上方向为正方向,两坐标轴的交点为平面直角坐标系的原点(如图1). 要点诠释:平面直角坐标系是由两条互相垂直且有公共原点的数轴组成的. 2. 点的坐标 平面内任意一点P,过点P分别向x轴、y轴作垂线,垂足在x轴、y轴上对应的数a,b 分别叫做点P的横坐标、纵坐标,有序数对(a,b)叫做点P的坐标,记作:P(a,b),如图2. 要点诠释: (1)表示点的坐标时,约定横坐标写在前,纵坐标写在后,中间用“,”隔开.
(2)点P(a,b)中,|a|表示点到y轴的距离;|b|表示点到x轴的距离. (3) 对于坐标平面内任意一点都有唯一的一对有序数对(x,y)和它对应,反过来对于任意一对有序数对,在坐标平面内都有唯一的一点与它对应,也就是说,坐标平面内的点与有序数对是一一对应的. 要点三、坐标平面 1. 象限 建立了平面直角坐标系以后,坐标平面就被两条坐标轴分成如图所示的Ⅰ、Ⅱ、Ⅲ、Ⅳ四个部分,分别叫做第一象限、第二象限、第三象限和第四象限,如下图. 要点诠释: (1)坐标轴x轴与y轴上的点(包括原点)不属于任何象限. (2)按方位来说:第一象限在坐标平面的右上方,第二象限在左上方,第三象限在左下方,第四象限在右下方. 2. 坐标平面的结构 坐标平面内的点可以划分为六个区域:x轴,y轴、第一象限、第二象限、第三象限、第四象限. 这六个区域中,除了x轴与y轴有一个公共点(原点)外,其他区域之间均没有公共点. 要点四、点坐标的特征 1.各个象限内和坐标轴上点的坐标符号规律 要点诠释: (1)对于坐标平面内任意一个点,不在这四个象限内,就在坐标轴上. (2)坐标轴上点的坐标特征:x轴上的点的纵坐标为0;y轴上的点的横坐标为0. (3)根据点的坐标的符号情况可以判断点在坐标平面上的大概位置;反之,根据点在坐标平面上的位置也可以判断点的坐标的符号情况. 2.象限的角平分线上点坐标的特征 第一、三象限角平分线上点的横、纵坐标相等,可表示为(a,a); 第二、四象限角平分线上点的横、纵坐标互为相反数,可表示为(a,-a). 3.关于坐标轴对称的点的坐标特征 P(a,b)关于x轴对称的点的坐标为 (a,-b); P(a,b)关于y轴对称的点的坐标为 (-a,b); P(a,b)关于原点对称的点的坐标为 (-a,-b). 4.平行于坐标轴的直线上的点
(整理)公路测量坐标系的建立
摘要】本文以公路测量为例,较详细地论述了在线路测量中应考虑的变形因素,以及解决变形的办法,详细地叙述了建立独立坐标系的作用及建立这种坐标系的六种方法,并介绍了因提高归化高程面而产生新椭球后的一些椭球常数的计算方法和步骤。此外,本文还对当路线跨越相邻投影带时,需要进行相邻带的坐标换算这一问题进行了阐述。 【关键字】独立坐标系高斯投影带抵偿高程面新椭球常数坐标转换归化高程面 线路控制测量中坐标系统的建立与统一方法 第一章概述 铁路、公路、架空送电线路以及输油管道等均属于线型工程,它们的中线统称线路。一条线路的勘测和设计工作,主要是根据国家的计划与自然地理条件,确定线路经济合理的位置。为达此目的,必须进行反复地实践和比较,才能凑效。 线路在勘测设计阶段进行的控制测量工作,称线路控制测量,在线路控制测量过程中,由于每条线路不可能距离较短,有的可能跨越一个带,二个带甚至更多,所以,在线路控制测量中,长度变形是一个不可避免的问题,但我们可以采取一些措施来使长度变形减弱,将长度变形根据施测的精度要求和测区所处的精度范围控
制在允许的范围之内。最有效的措施就是建立与测区相适应的坐标系统. 坐标系统是所有测量工作的基础.所有测量成果都是建立在其之上的,一个工程建设应尽可能地采用一个统一的坐标系统.这样既便于成果通用又不易出错.对于一条线路,如果长度变形超出允许的精度范围,我们将建立新的坐标系统加以控制.这就涉及到一个非常关键的问题,既,坐标系统的建立与统一.对于不同的情况,我们可以采用适应的方法尽可能建立统一的坐标系统,且使其长度变形在允许范围之内. 本文以公路控制测量为例,详细论述了线路控制测量中坐标系统的建立与统一方法. 第二章坐标系统的建立 当对一条线路进行控制测量时,首先应根据已有资料判断该测区是否属同一投影带和长度变形是否在允许范围之内.这样我们就可以判断是否需要建立新的坐标系统和怎样建立,下面对此进行详细讨论. §2.1 相对误差对变形的影响 与国家点联测的情况:
知识讲解空间直角坐标系基础
空间直角坐标系 【学习目标】 通过具体情境,感受建立空间直角坐标系的必要性,了解空间直角坐标系,会用空间直角坐标系刻画点的位置.通过表示特殊长方体(所有棱分别与坐标轴平行)顶点的坐标,探索并得出空间两点间的距离公式. 【要点梳理】 要点一、空间直角坐标系 1.空间直角坐标系 从空间某一定点O 引三条互相垂直且有相同单位长度的数轴,这样就建立了空间直角坐标系Oxyz ,点O 叫做坐标原点,x 轴、y 轴、z 轴叫做坐标轴,这三条坐标轴中每两条确定一个坐标平面,分别是xOy 平面、yOz 平面、zOx 平面. 2.右手直角坐标系 在空间直角坐标系中,让右手拇指指向x 轴的正方向,食指指向y 轴的正方向,如果中指指向z 轴的正方向,则称这个坐标系为右手直角坐标系. 3.空间点的坐标 空间一点A 的坐标可以用有序数组(x ,y ,z)来表示,有序数组(x ,y ,z)叫做点A 的坐标,记作A(x ,y ,z),其中x 叫做点A 的横坐标,y 叫做点A 的纵坐标,z 叫做点A 的竖坐标. 要点二、空间直角坐标系中点的坐标 1.空间直角坐标系中点的坐标的求法 通过该点,作两条轴所确定平面的平行平面,此平面交另一轴于一点,交点在这条轴上的坐标就是已知点相应的一个坐标. 特殊点的坐标:原点()0,0,0;,,x y z 轴上的点的坐标分别为()()(),0,0,0,,0,0,0,x y z ;坐标平面,,xOy yOz xOz 上的点的坐标分别为()()(),,0,0,,,,0,x y y z x z .
2.空间直角坐标系中对称点的坐标 在空间直角坐标系中,点(),,P x y z ,则有 点P 关于原点的对称点是()1,,P x y z ---; 点P 关于横轴(x 轴)的对称点是()2,,P x y z --; 点P 关于纵轴(y 轴)的对称点是()3,,P x y z --; 点P 关于竖轴(z 轴)的对称点是()4,,P x y z --; 点P 关于坐标平面xOy 的对称点是()5,,P x y z -; 点P 关于坐标平面yOz 的对称点是()6,,P x y z -; 点P 关于坐标平面xOz 的对称点是()7,,P x y z -. 要点三、空间两点间距离公式 1.空间两点间距离公式 空间中有两点()()111222,,,,,A x y z B x y z ,则此两点间的距离 ||d AB == 特别地,点(),,A x y z 与原点间的距离公式为OA = 2.空间线段中点坐标 空间中有两点()()111222,,,,,A x y z B x y z ,则线段AB 的中点C 的坐标为121212,,222x x y y z z +++?? ???. 【典型例题】 类型一:空间坐标系 例1.在正方体ABCD —A 1B 1C 1D 1中,E 、F 分别是BB 1、D 1B 1的中点,棱长为1,建立空间直角坐标系,求点E 、F 的坐标。 【答案】11,0,2E ? ? ???,11,,122F ?? ??? 【解析】 法一:如图,以A 为坐标原点,以AB ,AD ,AA 1所在直线分别为x 轴,y 轴,z 轴建立空
我国三大常用坐标系区别.
我国三大常用坐标系区别 我国三大常用坐标系区别(北京54、西安80和WGS-84)我国三大常用坐标系区别(北京54、西安80和WGS-84)。 1、北京54坐标系(BJZ54) 北京54坐标系为参心大地坐标系,大地上的一点可用经度L54、纬度M54和大地高H54定位,它是以克拉索夫斯基椭球为基础,经局部平差后产生的坐标系。 1954年北京坐标系的历史:新中国成立以后,我国大地测量进入了全面发展时期,再全国范围内开展了正规的,全面的大地测量和测图工作,迫切需要建立一个参心大地坐标系。由于当时的“一边倒”政治趋向,故我国采用了前苏联的克拉索夫斯基椭球参数,并与前苏联1942年坐标系进行联测,通过计算建立了我国大地坐标系,定名为1954年北京坐标系。因此,1954年北京坐标系可以认为是前苏联1942年坐标系的延伸。它的原点不在北京而是在前苏联的普尔科沃。北京54坐标系,属三心坐标系,长轴6378245m,短轴6356863,扁率1/298.3; 2、西安80坐标系 1978年4月在西安召开全国天文大地网平差会议,确定重新定位,建立我国新的坐标系。为此有了1980年国家大地坐标系。1980年国家大地坐标系采用地球椭球基本参数为1975年国际大地测量与地球物理联合会第十六届大会推荐的数据,即IAG 75地球椭球体。该坐标系的大地原点设在我国中部的陕西省泾阳县永乐镇,位于西安市西北方向约60公里,故称1980年西安坐标系,又简称西安大地原点。基准面采用青岛大港验潮站1952-1979年确定的黄海平均海水面(即1985国家高程基准)。西安80坐标系,属三心坐标系,长轴6378140m,短轴6356755,扁率1/298.25722101 3、WGS-84坐标系 WGS-84坐标系(World Geodetic System)是一种国际上采用的地心坐标系。坐标原点为地球质心,其地心空间直角坐标系的Z轴指向国际时间局(BIH)1984.0定义的协议地极(CTP)方向,X轴指向BIH1984.0的协议子午面和CTP 赤道的交点,Y轴与Z轴、X轴垂直构成右手坐标系,称为1984年世界大地坐标系。这是一个国际协议地球参考系统(ITRS),是目前国际上统一采用的大地坐标系。GPS广播星历是以WGS-84坐标系为根据的。 WGS84坐标系,长轴6378137.000m,短轴6356752.314,扁率1/298.257223563。 由于采用的椭球基准不一样,并且由于投影的局限性,使的全国各地并不存在一至的转换参数。对于这种转换由于量较大,有条件的话,一般都采用GPS联测已知点,应用GPS软件自动完成坐标的转换。当然若条件不许可,且有足够的重合点,也可以进行人工解算。
平面直角坐标系知识讲解
平面直角坐标系(基础)知识讲解 【学习目标】 1.理解平面直角坐标系概念,能正确画出平面直角坐标系. 2.能在平面直角坐标系中,根据坐标确定点,以及由点求出坐标,掌握点的坐标的特征. 3.由数轴到平面直角坐标系,渗透类比的数学思想. 【要点梳理】 要点一、有序数对 定义:把有顺序的两个数a与b组成的数对,叫做有序数对,记作(a,b). 要点诠释: 有序,即两个数的位置不能随意交换,(a,b)与(b,a)顺序不同,含义就不同,如电影院的座位是6排7号,可以写成(6,7)的形式,而(7,6)则表示7排6号. 要点二、平面直角坐标系与点的坐标的概念 1. 平面直角坐标系 在平面内画两条互相垂直、原点重合的数轴就组成平面直角坐标系.水平的数轴称为x 轴或横轴,习惯上取向右为正方向;竖直的数轴称为y轴或纵轴,取向上方向为正方向,两坐标轴的交点为平面直角坐标系的原点(如图1). 要点诠释:平面直角坐标系是由两条互相垂直且有公共原点的数轴组成的. 2. 点的坐标 平面内任意一点P,过点P分别向x轴、y轴作垂线,垂足在x轴、y轴上对应的数a,b 分别叫做点P的横坐标、纵坐标,有序数对(a,b)叫做点P的坐标,记作:P(a,b),如图2. 要点诠释: (1)表示点的坐标时,约定横坐标写在前,纵坐标写在后,中间用“,”隔开. (2)点P(a,b)中,|a|表示点到y轴的距离;|b|表示点到x轴的距离. (3) 对于坐标平面内任意一点都有唯一的一对有序数对(x,y)和它对应,反过来对于任意一对有序数对,在坐标平面内都有唯一的一点与它对应,也就是说,坐标平面内的点与有序数对是一一对应的. 要点三、坐标平面 1. 象限 建立了平面直角坐标系以后,坐标平面就被两条坐标轴分成如图所示的Ⅰ、Ⅱ、Ⅲ、Ⅳ四个部分,分别叫做第一象限、第二象限、第三象限和第四象限,如下图. 要点诠释: (1)坐标轴x轴与y轴上的点(包括原点)不属于任何象限. (2)按方位来说:第一象限在坐标平面的右上方,第二象限在左上方,第三象限在左下方,第四象限在右下方. 2. 坐标平面的结构 坐标平面内的点可以划分为六个区域:x轴,y轴、第一象限、第二象限、第三象限、第四象限. 这六个区域中,除了x轴与y轴有一个公共点(原点)外,其他区域之间均没有公共点. 要点四、点坐标的特征