PLC在高空作业车辆上的应用

PLC 在高空作业车辆上的应用
摘要: 高空作业车辆在我国现代化建设中的使用越来越广泛,发挥的作用
也越来越大。其主要功能和特点是实现人员、工具和物料空间位置的变化。因而,高空作业车辆通常具有行驶、变幅、回转、伸缩、悬臂等功能。为了实现高空作业的变幅、回转、伸缩、悬臂高空作业车辆普遍采用机—电—液逻辑控制。其中电气控制部分的功能是对各种车体运行信号进行监测然后作出相应的控制。本文介绍以PLC(可编程序控制器)改造原以单片机为核心的高空作业车辆的电气控制系统。其功能完善,立意新颖,应用软件和硬件相结合的手段构成的车体安全保护功能更可靠。
关键词:PLC、液压阀、称重传感器、平衡传感器 一、 高空作业车辆概况
1、现状分析
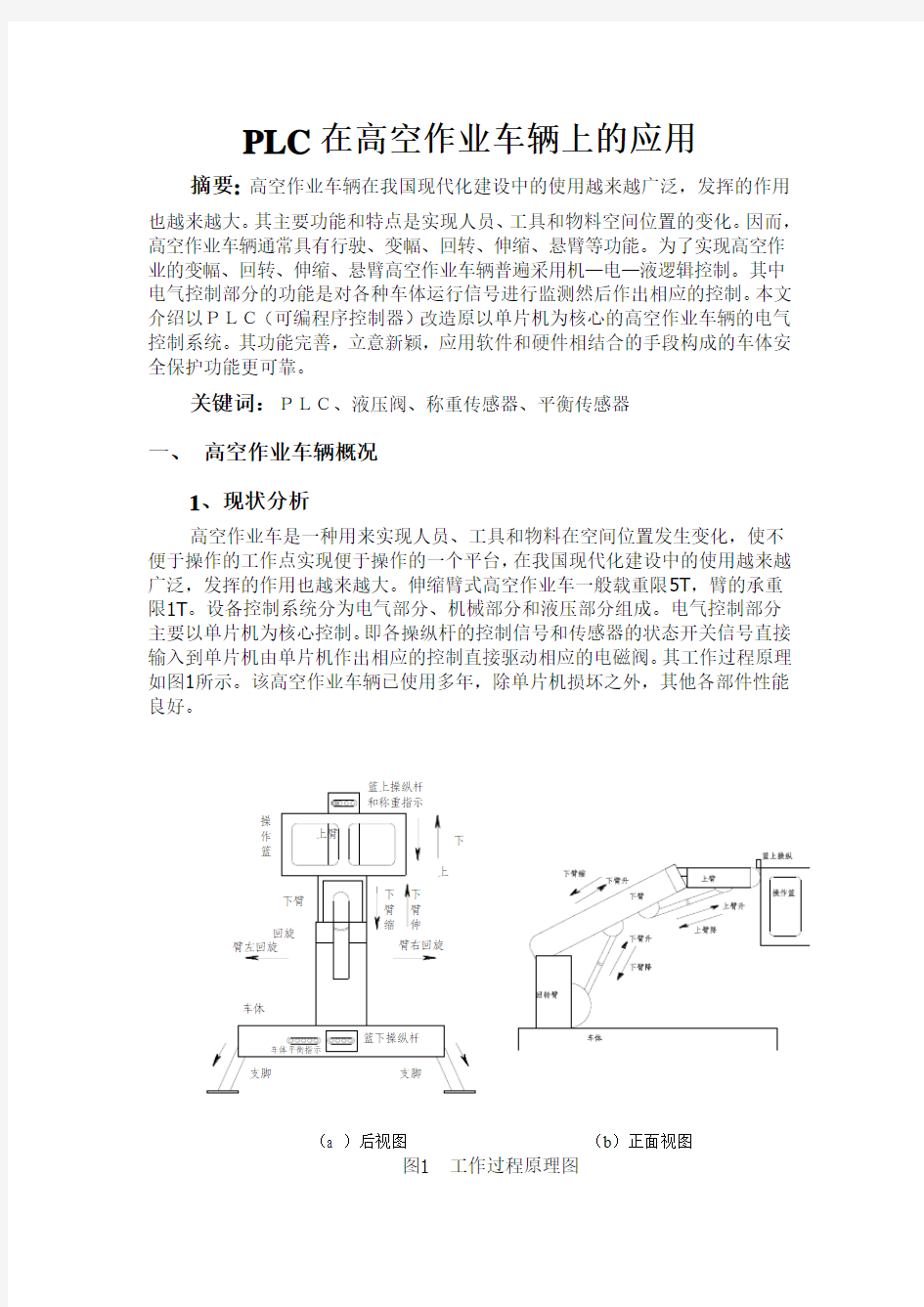
高空作业车是一种用来实现人员、工具和物料在空间位置发生变化,使不便于操作的工作点实现便于操作的一个平台,在我国现代化建设中的使用越来越广泛,发挥的作用也越来越大。伸缩臂式高空作业车一般载重限5T ,臂的承重限1T 。设备控制系统分为电气部分、机械部分和液压部分组成。电气控制部分主要以单片机为核心控制。即各操纵杆的控制信号和传感器的状态开关信号直接输入到单片机由单片机作出相应的控制直接驱动相应的电磁阀。其工作过程原理如图1所示。该高空作业车辆已使用多年,除单片机损坏之外,其他各部件性能良好。
上臂
车体平衡指示
篮下操纵杆
车体
臂右回旋
臂左回旋
下臂缩
下臂伸下
上
篮上操纵杆和称重指示
支脚
支脚回旋
下臂
操作篮
(a )后视图 (b )正面视图
图1 工作过程原理图
2、系统控制
该高空作业车辆电气控制系统分篮下控制和篮上控制。篮下控制由液压系统压力控制、支脚控制和车体平衡检测组成;篮上控制由回旋控制、伸缩控制、变幅控制的载重检测组成。
压力控制:打开液压系统总开关,液压泵工作。压力到达后,可进行臂的其他功能操作。
支脚控制:当操作支脚操纵杆时,操纵杆开关闭合,单片机驱动相对应的电磁液压阀工作。当支脚伸到极限时,液压就会通液压阀的溢流系统使支脚限位。
平衡控制:当车体当车体向一侧(前侧、后侧、左侧、右侧)倾斜时,水平传感器就会发出一个或两个开关信号传送给单片机,单片机就会控制对应的(前、后、左、右)红灯点亮。同时锁死篮上部分的控制。当车体平衡时,传感器就没有信号输出,单片机就会点亮绿灯。同时唤醒篮上的控制。
载重控制:当操作篮上的载重超过1000KG时,压力传感器就有一信号输出,传送给单片机,单片机控制对应的“超重”红灯点亮。同时篮上操作的所有功能都被禁止。
回旋、变幅、伸缩控制:回旋、变幅、伸缩分别由四根操纵杆控制,四根操纵杆之间形成互锁。由于篮上操纵杆是一双联开关,这样一来这左右、上臂上下、下臂上下、前后运动的八种状态就形成互锁。即当“左右”的操纵杆向左推时,系统通过单片机驱动向左运动,此时由于“左右”操纵杆接通了一种状态,四根操纵杆是互锁的,所以如果在此时操作另三根操纵杆是无效的。当手松开时操纵杆复位回到中间位置,此时可进行四根杆中的任意一根杆的操作。
二、电气系统的改造设计
1、控制要求
该电气控制系统要求四个支脚能独立控制,互相没有互锁等的联系。利用电磁阀本身的特点实现自锁、限位和限速。车身的平衡由水平平衡传感器监控,并以指示灯的方式来告知用户车体的平衡状况。当不平衡时要锁死臂的一切操作。
要控制臂工作的首要条件是要车体水平平衡。臂有上臂上下、下臂上下、左右和前后八种状态,当一种状态运行停止之后才能开始下一种状态的运行,互相能互锁。如向左回旋,当我操作操纵杆向左回旋时,左回旋电磁阀得电,而右回旋、上下、前后的电磁阀由于互锁功能,只有当左回旋的电磁阀失放后,右回旋、上下、前后的操作功能才被唤醒。臂的载重由一称重传感器监控,也以指示灯的方式来告知臂的载重是否超限。当载重超限时臂的上下左右前后八种状态都不能控制。
车辆尾部装一警示灯牌,灯牌要能向左或向右指示,并能有多种显示方式。
2、系统硬件选择及接线
2、1 系统的硬件选择
此项目是把旧的有故障的机器改造成功能更多、安全可靠性更高的项目,因此不仅要考虑实现功能的适用可行性还要考虑改造部分选用设备和保留设备的兼容性和性价比。
PLC的选择:为了尽量降低改造成本,本系统可编程序控制器选用现报废掉的改装过的旧情报板上的FX2N-128MR-001的PLC其I/O点数分别有64
点。PLC的配电是交流220V,需将电源部分进行改动。PLC的主要性能指标如表1所示:
表1 FX2N-128MR-001主要性能指标
输入点数64个输出点数64个
输入端口电压DC30V以下输出电压DC24V±10%
输入端口电流4~7mA 输出最大电流2A/1点
输入端口阻抗 3.3 kΩ响应时间10ms
响应时间ON:1ms, OFF:10ms 电路隔离继电器隔离
电路隔离继电器隔离辅助继电器(M)M0~M499
锁定继电器(M)M384~M3071 特殊继电器(M)M8000~M8255
运算速度0.08us/步(基本指令) 1.52~数百us(应用指令)
程序容量16KB 8KB
状态继电器(S) S0~S499 定时器(T) T0~T3276
计数器(C)(16位) C0~C199 计数器(C)(32位) C200~C299
数据寄存器(D)D0~D199 锁定寄存器(D)D200~D8255
外形尺寸(长×宽×高) 350mmx87mmx90mm 通信口2个
整机功耗20W 电源电压AC100~220V 50/60HZ 允许瞬间断电时间>10ms 环境湿度35%~89%不结露
环境温度使用时:0~55℃, 储存时:-20~+70℃
抗冲击JIS C0912标准 10G 3轴方向各3次
接地第三种接地,不可接地时也可浮空
耐压AC1500V 1min 绝缘电阻5MΩ以上
灯牌的选择:选用24V/160W的33灯灯牌,其配有一显示方式转换开关箱,只要给它一个逐列点亮、递进的和闪烁的信号,它就可以向左或向右以逐列点亮、递进或闪烁的方式显示了。其电气线路原理如图2。
继电器组
接灯座
-+
接PLC 输出端口
9
10111214151617189
10111216
1514138
7658
7654
3214
321X22 X23 X24 X25 X26 X27
com2
33
30
21
13
4
1
图2 灯牌电气原理图
2、2 传感器
水平平衡传感器 本系统所用的水平平衡传感器是一导电式液位传感器,基本工作原理如图3a 所示。它实际上是一个导电性的检测电路。当传感器处于水平平衡时,液位平面低于四个检知电极,电极间呈绝缘状态,传感器呈开路状态。假如车体向左前倾到一定角度时,液体与左前倾的检知电极接触,由于液体是导电液体,因此检测电路就形成闭合通路。传感器把各个电极的通断状态反映给受控点(如PLC 的输入端口)以达到控制的目的。
称重传感器 本系统所用的称重传感器是金属箔式应变片,基本工作原理如图3b 所示。电阻应变片式传感器利用了金属和半导体材料的“应变效应”把导体的机械应变转换成电阻应变,再以电压或电流的形式反映出来,即把应变片粘贴于所需测量变形物体表面,敏感栅随被测物体表面变形而使电阻值改变。测量电阻的变化量便可得知变形的大小。再把力敏感元件电阻应变片的某一点的值设为转换元件的通断点,传感器把这个开关信号反映给受控点即PLC 的输入端,以达到控制的目的。
图3
2、3液压阀
本系统控制所用的是平衡电磁液压阀。此类电磁阀的作用不但能锁紧,还能限速。主要性能指标有:
量程: 1.0吨
工作电压: 24VDC
最大电量: 250 mA
零点信号: +/ - 0,02 mV/ V
工作温度范围: -10°C 到+40°C
储存温度范围: -20°C 到+80°C
电力负载: 150% 的额定容量
机械负载: 200% 的额定容量
绝缘电阻: 2欧
防护标准: IP65
重量: 大约1.0 kg
2、4PLC电源的修改
车辆上原供电电压为24V DC,所选的PLC机上所用的电压为220V AC。必须将PLC机电源的降压整流部分去掉,为了工作电压的稳定,把电源的整流(RM50TC-2H/24)后面的稳压等电路保留。具体接法如图4。
整流桥
拆卸整流桥,用导线连接虚线路径
C1
1000uf/25v
N
L
L1
ZV1
R1
TR1CX1FU1
图4 PLC 的电源接线图
2、5 PLC 硬件的I/O 资源分配
本系统占用PLC 的29个输入点、44个输出点,根据PLC 所控制和采集信号的点数及操作的需要,现对PLC 资源进行分配。见表2所示:
表2 I/O 分配表
I/O 地址 说 明 I/O 地址 说 明
X0 总启动开关 Y0 工作液压泵 X1 压力到位开关 Y1 左前支脚液压阀(伸) X2 左前支脚操纵杆(伸) Y2 左后支脚液压阀(伸) X3 左后支脚操纵杆(伸) Y3 右前支脚液压阀(伸) X4 右前支脚操纵杆(伸) Y4 右后支脚液压阀(伸) X5 右后支脚操纵杆(伸) Y5 左前支脚液压阀(缩) X6 左前支肢操纵杆(缩) Y6 左后支脚液压阀(缩) X7 左后支脚操纵杆(缩) Y7 右前支脚液压阀(缩) X10 右前支脚操纵杆(缩) Y10 右后支脚液压阀(缩) X11 右后支脚操纵杆(缩) Y11 回旋液压阀(左旋) X12 左回旋操纵杆 Y12 回旋液压阀(右旋) X13 右回旋操纵杆 Y13 下臂液压阀(伸) X14 向前操纵杆 Y14 下臂液压阀(缩) X15 向后操纵杆 Y15 下臂液压阀(升) X16 下臂升操纵杆 Y16 下臂液压阀(降) X17 下臂降操纵杆 Y17 上臂液压阀(升) X20 上臂升操纵杆 Y20 上臂液压阀(降) X21 上臂降操纵杆 Y21 灯牌(1号) X22 灯牌左循环 Y22 灯牌(2号) X23 灯牌左闪烁 Y23 灯牌(3号) X24 灯牌向左逐列点亮 Y24 灯牌(4号) X25 灯牌右循环 Y25
灯牌(5号)
X26 灯牌右闪烁Y26 灯牌(6号)
X27 灯牌向右逐列点亮Y27 灯牌(7号)
X30 左前侧Y30 灯牌(8号)
X31 左后侧Y31 灯牌(9号)
X32 右前侧Y32 灯牌(10号)
X33 右后侧Y33 灯牌(11号)
X34 超重Y34 灯牌(12号)
Y35 灯牌(13号)
Y36 灯牌(14号)
Y37 灯牌(15号)
Y40 灯牌(16号)
Y41 灯牌(17号)
Y42 灯牌(18号)
Y43 灯牌(19号)
Y44 灯牌(20号)
Y45 灯牌(21号)
Y46 左前侧(红灯1)
Y47 左后侧(红灯2)
Y50 右前侧(红灯3)
Y51 右前侧(红灯4)
Y52 车体平衡(绿灯)
Y53 超重
2、6 硬件结构图
根据以上资源分配,和系统所要完成的任务,结合各部件的实际情况,可画出系统的I/O接线图,如图5所示。
本系统采用了液位平衡传感器和称重传感器来采集车体的平衡状态和载重是否超限的状态信息,采用操纵杆给PLC发送操作指令,由用户PLC程序来实现各种液压阀的工作与否和安全提示输出,充分体现了PLC在控制点较多、工作环境较差和工作场地经常发生变化的场合中应用的优越性。
3、系统软件设计
软件是本系统的灵魂,在设计编写程序时从系统实用、可靠及方便这几方面考虑.由于PLC工作的主要特点是输入信号集中处理,执行过程集中处理和输出控制集中处理。PLC在执行过程时所用到的状态值不是直接从实际输入端口所获得,而是来源于输入映像寄存器和输出映像寄存器。
大量PLC系统的应用表明:应用软件程序开发的好坏直接影响到PLC控制系统的成败。因此在深入现场了解的基础上,采用GX DEVELOPER用于对三菱全系列PLC进行编程和维护的软件进行设计程序,并通过PC将程序传送到PLC中。本系统应用程序(见附页)。
4、程序分析
液压系统控制启动程序:总启动开关具有记忆功能,当闭合总启动开关时,X0闭合接通,PLC的Y0端有输出信号,液压泵工作。当压力达到时,压
力达到检测开关闭合,中间继电器M0也闭合。此时可进行支脚和臂的操作。
四个支脚的控制程序:当压力达到后,操作四个支脚的操纵杆向下压,使X2、X3、X4、X5(可互相或独立工作)闭合,X2、X3、X4、X5分别使Y1、Y2、Y3、Y4输出,分别控制四个支脚伸出电磁阀得电工作,四个支脚伸出。操作四个支脚操纵杆向上压时,X6、X7、X10、X11闭合,使Y5、Y6、Y7、Y10也闭合,分别控制四个支脚缩回的电磁阀得电工作,四个支脚缩回。
车体水平平衡检测给与称重检测控制程序:当车体向一角或一边倾斜时,车体的水平平衡传感器也随车体倾斜,此时水平平衡传感器对应的检知电极被接通。如向左前角倾斜,X30闭合,对应的Y46驱动左前侧红灯点亮。此时可将左前支脚的操纵杆向上压,使左前支脚伸长,或同时压下右前、左后和右后三个操纵杆,使右前、左后和右后三个支脚缩回一点,使车体得以水平平衡,X30断开,四个红灯都不亮,使Y52动作输出,绿灯点亮。当称重传感器发来超限信号时,X34的常开点动作,Y53驱动超重红灯点亮,同时Y53的常闭点也动作变成断开状态,使中间继电器M1不得电,臂会因此而不能进行任何功能的操作。当车体水平平衡,载重不超限时,车体平衡绿灯亮起超重红灯不亮,Y46的常开得电闭合与Y53的常闭同时来控制M1接通,可进行臂的所有功能操作。
回旋控制程序:操作回旋操纵杆,当向前推杆时,X12为ON,Y11有输出,驱动左回旋液压阀使臂左回旋;当向后拉杆时,X13为ON,Y12有输出,驱动右回旋液压阀使臂右回旋。在硬件上左回旋、右回旋互锁;在软件上回旋与臂的伸缩、上下互锁。
伸缩控制程序:操作伸缩操纵杆,当向前推杆时,X14为ON,Y13有输出,驱动臂伸出的液压阀使臂伸出;当向后拉杆时,X15为ON,Y14有输出,驱动臂回缩的液压阀使臂回缩。在硬件上臂的伸出与回缩互锁;在软件上臂的伸缩与臂的回旋、上下互锁。
下臂升降控制程序:操作下臂上下操纵杆,当向前推杆时,X16为ON,Y15有输出,驱动下臂升起的液压阀使下臂上升;当向后拉杆时,X17为ON,Y16有输出,驱动下臂下降的液压阀使下臂下降。在硬件上下臂的上升与下降互锁,在软件上下臂的上下控制与臂的回旋、伸缩、上臂的上下操作互为联锁。
上臂升降控制程序:操作上臂上下操纵杆,当向前推杆时,X20为ON,Y17有输出,驱动上臂上升的液压阀使上臂上升;当向后拉杆时,X21为ON,Y20有输出,驱动上臂下降的液压阀使下臂下降。在硬件上上臂的上升与下降互锁,在软件上上臂的上下控制与臂的回旋、伸缩、下臂的上下操作互为联锁。
灯牌的循环控制程序:当旋动开关接通X22时左循环开始,M20被置位输出,首先通过M10使Y24、Y33、Y43驱动4号、11号、19号、28号和33号灯点亮,1S后INC指令加1使M11为ON,通过Y23、Y31、Y41驱动3号、9号、17号、26号和32号灯点亮;1S后INC指令加1使M12为ON,通过Y22、Y27、Y37驱动2号、7号、15号、24号和31号灯点亮;1S后INC指令加1使M13为ON,通过Y21、Y25、Y35驱动1号、5号、13号、22号和30号灯点亮,同时M13接通M8013产生的1S脉冲对M20复位。由于X22是接通的,所以M20复位后马上又被置位,就再次通过M10使Y24、Y33、Y43驱动4号、11号、19号、28号和33号灯点亮。当旋动开关接通X25时也以同样的道理进行周而复始的
右循环。
灯牌的闪烁控制程序:当旋动开关接通X23时,X23为ON,M8013产1S 的脉冲周期接通M10、M11、M12、M13,使左向指示的灯以1S的周期闪烁;
旋动开关接通X26时,X26为ON,M8013产1S的脉冲周期接通M14、M15、M16、M17,使右向指示的灯以1S的周期闪烁。
灯牌的步进控制程序:当旋动开关接通X24时,S20被置位,Y24、Y33、Y43、Y44和Y45驱动向左指向的第一列灯点亮,1S后M8013产生的脉冲使S21的条件成立,S20这步的任务完成,同时S21被置位,Y23、Y31、Y41、Y42、Y43、Y44和Y45驱动向左指向的第二列灯点亮,1S后M8013产生的脉冲使S22的条件成立,S21这步的任务完成;同时S22被置位,Y22、Y27、Y37、Y40、Y41、Y42、Y43、Y44和Y45驱动向左指向的第三列灯点亮,1S后M8013产生的脉冲使S23的条件成立,S22这步的任务完成;同时S23被置位,Y21、Y25、Y35、Y36、Y37、Y40、Y41、Y42、Y43、Y44和Y45驱动向左指向的第四列灯点亮,1S后程序跳转指向S20,S23这步的任务完成。灯牌进行第二个周期的工作。当旋动开关接通X27时也以同样的道理进行周而复始的右循环指向。
5、系统程序调试
由于此项目是旧设备改造项目,可省去很多调试工作。因此本系统只作如下调试。
硬件调试:(1)用万用表的低电阻档检测各个操纵杆的功能是否良好;
(2)给压力泵通电用万用表的同一档位检查压力到达开关,压力到达时,压力开关应闭合;(3)用一个100欧的电阻串上DC24V电源去驱动各电磁阀和灯牌。
软件调试:程序编译完成后,导入GX Simulator6-C PLC仿真软件,逐个强行通断对应操纵杆的开关,看其对应的动作是否与控制要求一致,如果动作情况与控制要求一致表明程序正确。用多次重复操作的方法检查所编译程序的可读性。
整机调试:运行系统,用软导线分别短路水平平衡传感器的输出端和称重传感器的输出端,操作各操纵杆,支脚应能伸缩,臂应不能动作。模拟正常使用,操作各个功能。
三、结束语
高空作业车辆在我国现代化建设中的使用越来越广泛,发挥的作用也越来越大。整个系统本着尽单间可靠,最终目的是要改造成一种成本低、抗干扰能力强、运行稳定的PLC控制系统,本系统选用仓库回收的旧件完成了设计任务,经实际运行,达到了设计目标。可以说是以是让所用的设备变废为宝、起死回生,为公司创造了一定的效益。
附:
I/O接线图
梯形图
参考献文
《可编程序控制器原理应用与实例解析》清华大学出版社《FX2N编程序手册》
中国工控网(http://https://www.360docs.net/doc/8e8234665.html,)
2019年高空作业车说明书.doc
前言 感谢您购置我们的产品。为了您更好的使用高空作业车,获得最佳的效益,我们恳切地希望您在使用车辆之前能够仔细阅读本《产品保养及使用说明书》。 本说明书详细地介绍了高空作业车的性能、结构、使用方法、注意事项及保养等知识。操作者在操作前必须认真的阅读了本说明书的有关内容。在掌握其性能特点、操作方法和注意事项后,方可使用该车。为了保证在操作人员更替后,也能正确的使用该车,本使用维护说明书必须妥善保管,不得遗失和损坏。
目录 一、技术特性 1、主要技术参数 2、外形图 3、工作范围特性曲线 二、整车结构简介 1、底盘 2、取力装置 3、底架 4、伸缩臂 5、平衡机构 6、旋转机构 7、中心回转接头 8、工作斗 9、液压系统 10、电路系统 三、操作应注意事项 四、维修保养 五、常见故障处理 六、附录 1、润滑图 2、易损件和密封件
一、技术特性(见图1、图2) 1、主要技术参数 (1)最高工作高度: 20米 (2)最大工作幅度: 12.5米 (3)工作斗尺寸(玻璃钢)(长×宽×高) 1060×700×1000 (mm) (4)工作斗额定载荷: 200公斤 (5)回转角度: 360°(全回转) (6)支腿型式和数量: H型 4支腿伸缩可调 (7)汽车底盘型号: BJ5133EJFFD-S (8)驾驶室: 单排 (9)整车总质量: 9.5吨 (10)整车外形尺寸(长×宽×高): 8850×2470×3660(mm) (11)操纵方式: 电控、斗上操纵和斗下操纵 (12)接近角: 16° (13)离去角: 13° (14)最高车速: 90(km/h)
2、整车外形图。 图 1 - - 4
中国高空作业车行业市场分析报告
中国高空作业车行业市场分析报告
目录 第一节高空作业平台优势分析 (5) 一、高空作业平台:灵活高效易用 (5) 二、高空作业平台更安全、高效、经济 (7) 第二节机械军工行业国际市场分析 (9) 一、欧美市场发展成熟 (9) 二、国际龙头规模大 (11) 三、高空作业平台国际巨头 (13) 四、Terex:高空作业平台业务全球第一 (15) 第三节我国高空作业平台现状分析 (22) 一、我国高空作业平台:销量快速增长 (22) 二、行业持续快速发展原因 (23) 三、我国高空作业相关法律法规亟待改善 (25) 四、预计未来 5 年复合增速超 30% (26) 五、国内厂家规模较小 (28) 第四节企业分析 (29) 一、浙江鼎力 (29) 二、中联重科 (30)
图1:高空作业平台与高空作业车均属于高空作业机械 (5) 图2:高空作业平台可应用于建筑施工、大型设备安装制造、建筑物表面维护、超市仓库物流等 (6) 图3:随高度升高,脚手架作业的边际成本将超过高空设备作业 (8) 图4:2013年美国高空作业平台租赁收入达72亿美元 (9) 图5:2013年美国高空作业平台租赁市场设备存量超过48万台 (10) 图6:2013年欧洲高空作业平台租赁收入达23亿欧元 (10) 图7:2013年欧洲高空作业平台租赁市场设备存量超过23万台 (11) 图8:浙江鼎力高空作业平台收入(亿元)不到Terex的2.5% (12) 图9:2014年全球高空作业平台前五大企业收入(百万美元)占前20强比例近70% (12) 图10:2014年Terex高空作业平台中直臂式占比达到53% (13) 图11:Haulotte亚太区收入占比近年来持续提升 (14) 图12:Terex高空作业平台业务欧美以外地区收入占比有所提升 (15) 图13:吉尼产品:直臂型高空作业平台S-120/S-125 (16) 图14:吉尼产品:剪型高空作业平台GS?-4047 (16) 图15:吉尼产品:曲臂型高空作业平台Z?-135/70 (17) 图16:吉尼产品:拖车式曲臂型高空作业平台TZTM-34/20 (18) 图17:Terex高空作业平台业务常年保持20亿美元左右收入 (19) 图18:Terex高空作业平台业务毛利润维持5亿美元左右水平 (20) 图19:Terex高空作业平台业务毛利率基本维持在20%以上 (20) 图20:Terex常州工厂于2011年正式落成 (21) 图21:我国高空作业平台处于起步阶段,规模较小但增速较快 (22) 图22:浙江鼎力研发费用占收入比例维持较高水平,且稳中有升 (23) 图23:我国建筑业产值已超越美国,远超日本 (23) 图24:近年来我国建筑业就业人员平均工资快速增长 (24) 图25:特雷克斯高空作业平台应用于国家会展中心(上海) (25) 图26:中国每亿元建筑业产值对应高空作业平台数远低于美日 (26) 图27:中国每万名建筑从业人员对应高空作业平台数极低 (27) 图28:综合判断到2020年我国高空作业平台存量将接近10万台,CAGR=31% (27) 图29:2014年浙江鼎力收入约为星邦与美通收入之和的2倍 (29) 图30:浙江鼎力高空作业平台产品 (29)
高空作业车操作规范方案
高空作业车管理办法 1.目的 为确保安全使用高空作业车,规范高空作业车的使用、操作,做好高空作业车的日常维护保养工作,提高设备的完好率,特制订本规程。 2.职责划分 办公室负责对使用、操作规程的制定、修改和监督工作。使用单位负责的高空作业车的使用管理、日常操作和维护保养工作。 各单位需使用高空作业车,需填写《高空作业车使用申请表》报办公室批准,由前港变电队安排使用。 3.操作 3.1操作高空作业车人员必须身体健康。凡患有精神病、癫痫病及经医师鉴定患有高血压、心脏病的施工人员等不宜操作高空作业车。凡发现工作人员有饮酒、精神不振时,禁止操作高空作业车。 3.2 使用高空作业车必须配置经过专门培训,考试合格,持证上岗的专业操作人员。未达到规定的使用条件不得强行作业。
3.3高空作业车操作人员必须按照机械设备的保养规定,在执行各项检查和保养后方可启动高空作业车。 工作前应检查高空作业车的工作范围,柴油、液压油液面等,清除妨碍高空作业车回转及行走的障碍物。 禁止在发动机运转情况下填加燃油,填加燃油时不得溅出。 禁止在工作状态下填加液压油。 3.4高空作业车作业前,工作负责人应向操作人员,进行技术和安全交待,内容应包括:工作内容及要求;安全注意事项及危险点;如安全帽、安全带是否配套齐全,工作人员精神状态是否良好,人员分工情况及责任范围。工作负责人除要对车况和操作人员进行检查以外,还要负责查看地形环境、起降是否符合安全技术措施的要求或事先制定的工作方案,如有出入,则应制定出相应的措施后方能开始工作。 3.5工作平台上的操作人员应佩带安全带,安全带应就近挂在钢结构架上。 3.6高空作业车登高作业应由专业人员负责人进行指挥,负责人应按照规定信号与升降平台操作工进行联系。发出的信号必须清楚、准确,便随时观测地面情况。 作业时利用好对讲系统,讲机无信号严禁施工。 3.7在台风、暴雨、打雷等恶劣天气,应停止操作高空作业车。 3.8高空作业一律使用工具袋,较大的工具应用绳拴在牢固
剪叉式高空作业平台安全使用规范通用范本
内部编号:AN-QP-HT103 版本/ 修改状态:01 / 00 In A Group Or Social Organization, It Is Necessary T o Abide By The Rules Or Rules Of Action And Require Its Members To Abide By Them. Different Industries Have Their Own Specific Rules Of Action, So As To Achieve The Expected Goals According T o The Plan And Requirements. 编辑:__________________ 审核:__________________ 单位:__________________ 剪叉式高空作业平台安全使用规范通 用范本
剪叉式高空作业平台安全使用规范通用 范本 使用指引:本管理制度文件可用于团体或社会组织中,需共同遵守的办事规程或行动准则并要求其成员共同遵守,不同的行业不同的部门不同的岗位都有其具体的做事规则,目的是使各项工作按计划按要求达到预计目标。资料下载后可以进行自定义修改,可按照所需进行删减和使用。 现在越来越多的高空作业平台在国内得到认可和广泛使用,在高空作业给我们的工作带来方便的同时,我们不得不面对的是一些安全隐患,如在施工现场的剪叉式升降平台就要重点防止其倾覆,刮蹭,触电等几个方面。如在施工用电方面,需有专人负责管理用电,按工程部门的通知,从指定的电源点引接到施工配电柜,除此外,不准擅自乱接。所有电动工具采用漏电保护器,电动设备采用接零保护,并作重复接地。 在日常的使用过程中也应重点做好,全用
高空作业车操作规程
高空作业车操作规程(总2页) -CAL-FENGHAI.-(YICAI)-Company One1 -CAL-本页仅作为文档封面,使用请直接删除
高空作业车安全操作规程 一、未经培训合格并获得操作、驾驶资格证书的人员严禁操作高空 作业车。 二、行驶前准备 1、操作前应仔细阅读说明书,了解驾驶、使用要求,掌握整车行驶性能参 数。 2、行驶前按底盘使用要求进行底盘油位、水位等检查。 3、检查燃油箱油位。(需考虑高空和起重作业的油耗) 4、检查液压油位,确保液压箱中的油量达到规定值。 5、检查上、下臂是否落位,不得悬空。 6、检查工作平台内是否有遗漏的的工具或物品,如果有,及时取下。在车 辆行驶时,工作平台内部的放置没有固定的物品。 7、检查支腿是否完全收回。 8、检查取力操纵杆是否已使取力齿轮与汽车变速箱脱离 三、工作地点的选择 1、工作场所地面允许的最大倾斜角为5°。需要在斜坡上作业是应将车头 对准坡顶方向停放。 2、在公路上作业时应使车体与道路边缘距离不小于760mm(支腿伸出长 度),并及时打开危险警告信号灯。 3、作业车不得在有火灾、爆炸危险的区域、腐蚀性的环境工作。 4、作业车工作的温度范围是-25℃~40℃,不允许在此范围外的温度下工 作。 5、环境相对湿不大于90%(25℃)。 6、光线暗淡或能见度低时禁止工作。 7、海拔高度不超过1000m。 8、风力超过6级时,作业车不得工作。 9、当工作范围内有电线通过时,应当始终保持足够的安全距离。
10、作业车工作室应与悬崖和沟渠保持足够的安全距离。 11、雷雨天气作业车严禁工作。 四、其他安全事项 1、严禁超载作业,严禁作业人员不系安全带进行空中作业。 2、操作时禁止采用凳子梯子等垫高方式工作,不得将身体重心探出工作平 台底板外。 3、严禁从工作工作平台上或者往工作平台扔物品。 4、严禁起重和登高同事作业。 5、严禁用吊钩启起吊埋在地下情况不明的物体,严禁横向拖拉重物,以免 超出负荷引发事故。 6、工作时,起重臂下严禁站人。 7、进行高空作业时,应有一名操作人员在车辆旁边,随时准备进行应急操 作。 8、不得改变液压阀的调定值。 9、严禁在取力齿轮未脱离状态下行驶车辆。
高空作业车专项施工方案
**********************续建工程 (机电安装) 高 空 作 业 车 施 工 方 案 编制人: 审核人: 审批人: 编制单位: 编制日期:
目录 1. 编制依据 (1) 2. 工程概况 (1) 3. 高空作业车进场时间及施工部署 (3) 4. 高空作业车操作规程 (3) 5. 安全保证措施 (4) 6.事故应急救援预案 (5)
1.编制依据 1.1《建筑工程安全生产管理条例》 1.2《中华人民共和国国家标准建筑施工高处作业安全技术规范》1.3《施工组织设计》 1.4《建筑机械使用安全技术规程》 1.5《安保体系》 1.6《高空作业车操作使用说明书》 2.工程概况
3. 高空作业车进场时间及施工部署 由于安装难度大、工期紧,经测算,1#展馆和2#展馆各需30个工作日才能完成实际工程量,计划在7、8月份将展馆的照明配管、电缆敷设、灯具及水炮等安装完毕,故每个展馆需配备2台高空作业车进行施工,高空作业车进场时间如下: 4. 高空作业车操作规程 为确保安全使用高空作业车及升降平台,结合相关规程和规定,特制定高空作业车及升降平台安全操作规程。 1)操作高空作业车及升降平台人员必须身体健康。患有精神病、 癫痫病及经医师鉴定患有高血压、心脏病等不宜操作高空作业 车及升降平台。凡发现工作人员有饮酒、精神不振时,禁止操 作高空作业车及升降平台。 2)使用高空作业车及升降平台必须配置经过专门培训,考试合 格,持证上岗的专业操作人员。 3)高空作业车及升降平台操作人员必须按照机械设备的保养规 定,在执行各项检查和保养后方可启动高空作业车及升降平 台,工作前应检查高空作业车及升降平台车的工作范围,清除 妨碍高空作业车及升降平台车回转及行走的障碍物。 4)支撑是高空作业车及升降平台操作的一项重要准备工作,应选 择平整的地面,如地基松软或起伏不平,必须用枕木垫实后, 才可进行工作。
高空作业车安全操作规程
高空作业车安全操作规程 1 范围 本规程规定了高空作业车司机安全操作的内容与要求。 本规程适用于公司的高空作业车司机。 2 规范性引用文件 本规程引用了集团《机械司机通用安全守则》和《高空作业车使用说明书》。 3 内容与要求 3.1 基本要求 遵守公司《汽车驾驶员安全操作规程》的有关规定 3.2 作业前 3.2.1 司机及施工人员应着装整齐,按规定穿戴好劳动防护用品。 3.2.2 服用任何导致判断力、反应敏感度下降的药物不得登车作业。 3.2.3 上车前首先查看车辆运行日志有无记载故障点和注意事项。如无不良记录,则对全车进行细致检查。 3.2.4 行驶时严禁驱动油泵。 3.2.5 到达作业现场之后,应首先检查作业现场地形环境,根据需要准备垫木块垫在支腿下面;对整机进行例行检查,查看各检查肘的联接是否可靠;各润滑点的润滑是否正常;连接螺栓是否松动,结构件是否有开焊现象;钢丝绳是否有断丝和过度磨损;液压油箱内液面是否达到了规定的液面高度。检查完毕,确认正常之后方可作业。 3.2.6 作业地点应选择地面平整,且允许的最大倾斜角为5°的坚实地面。需要在斜坡上工作时,停车时应将驾驶室冲着坡顶,车辆的纵向与斜坡的方向一致,不能横在坡上。 3.2.7 起动发动机,将变速器置于空挡位置,拉紧手刹车,踩下离合器踏板,将取力器操纵开关拨至啮合位置,使取力器齿轮与变速箱内的齿轮啮合,然后慢慢松开离合器带动油泵运转,确定油泵运转正常,无异响后,调节怠速旋钮,将发动机转速调至800r/min,即可作业。 3.2.8 按照支腿操控箱上的标示铭牌,分步骤逐次打开支腿。操纵下车手动阀和转阀,先伸水平支腿,后伸垂直支腿,抬起车身(前后轮胎离地)。通过转阀和垂直支腿换向阀,调整垂直支腿的伸出长度,将整机调整平稳,然后将转向阀转到全闭位置。 3.2.9 在支撑整车时应注意: 3.2.9.1 在高低不平场地或支脚支撑处地基较软时,用垫木块垫在支脚下。 3.2.9.2 必须在工作臂处于初始位置时(在臂支架上),才可以进行支腿操作。基本臂离开臂支架后,支腿锁死,不能进行操作。 3.2.9.3 伸支腿时,必须先伸水平支腿,再伸垂直支腿;收支腿时,先收垂直支腿,后收水平之腿。 3.2.9.4 伸支腿时,注意观察水平仪,以保持车架基本水平,应使水平仪的气泡位于最小的圆圈内,否则,应再调节支腿,使车架水平,支腿伸出后,轮胎必须离开地面一定距离(10-30mm)。 3.2.9.5 支腿操作完毕后,注意将手柄全部置于中间位置。 3.2.9.6 支腿没有完全支好时,严禁作业;支腿没有完全收回到初始位置时,严禁行车。
高空作业车专项施工方案
**********************工程 高 空 作 业 车 施 工 方 案 编制人: 审核人: 审批人: 编制日期:
目录 1. 编制依据 (1) 2. 工程概况 (1) 3. 高空作业车进场时间及施工部署 (3) 4. 高空作业车操作规程 (3) 5. 安全保证措施 (4) 6.事故应急救援预案 (5)
1.编制依据 1.1《建筑工程安全生产管理条例》 1.2《中华人民共和国国家标准建筑施工高处作业安全技术规范》1.3《施工组织设计》 1.4《建筑机械使用安全技术规程》 1.5《安保体系》 1.6《高空作业车操作使用说明书》 2.工程概况
第章
3. 高空作业车进场时间及施工部署 由于安装难度大、工期紧,经测算,1#展馆和2#展馆各需60个工作日才能完成实际工程量,计划在9-11月份将照明配管、电缆敷设、灯具及水炮等安装完毕,故每个展馆需配备2台高空作业车进行施工,高空作业车进场时间如下: 4. 高空作业车操作规程 为确保安全使用高空作业车及升降平台,结合相关规程和规定,特制定高空作业车及升降平台安全操作规程。 1)操作高空作业车及升降平台人员必须身体健康。患有精神病、 癫痫病及经医师鉴定患有高血压、心脏病等不宜操作高空作业 车及升降平台。凡发现工作人员有饮酒、精神不振时,禁止操 作高空作业车及升降平台。 2)使用高空作业车及升降平台必须配置经过专门培训,考试合格, 持证上岗的专业操作人员。 3)高空作业车及升降平台操作人员必须按照机械设备的保养规 定,在执行各项检查和保养后方可启动高空作业车及升降平 台,工作前应检查高空作业车及升降平台车的工作范围,清除 妨碍高空作业车及升降平台车回转及行走的障碍物。 4)支撑是高空作业车及升降平台操作的一项重要准备工作,应选 择平整的地面,如地基松软或起伏不平,必须用枕木垫实后, 才可进行工作。
高空作业车使用说明书
高空作业车使用说明书 一、概述湖北楚胜汽车高空作业车以东风小霸王、江铃五十铃、福田奥铃、东风140、东风145 系列等底盘(也可采用其他车辆改装),全回转三折臂式液压多功能工程作业车,它能将工作人员平稳,安全的送到14-20 米的高空作业,进行维修、安装、清洗、摄影、造船、化工、电力、剪枝、更换路灯及其他工程抢修作业。该车的主臂上还设有起重结构,故该车的使用领域较宽。 该车驾驶室外型美观,内部舒适,可载(座)3-6 人,整车外形尺寸小于国内同类产品,整车移动方便,能适合狭窄的地段,小街小巷作业。该车的上臂、下臂、回转和起重液压系统均为独特无级调速系统,具有节能和动作灵活,平稳安全可靠的特点。该车的支腿分单独、可调,能实现整车在平路上调平。该车液压和电器控制系统均设有各种限位装置及发动机紧急熄火装置。能在操作人操作失误,出现故障自动切断电源或紧急停止发动机,及时停止危险动作,确保安全可靠。该车电动操作系统均采用防水开关,避免了开关易进水,锈蚀漏电的问题,工作斗采用管状工作斗,外形美观,在工作斗和转台实行双位置操作,使用方便,维修简便,安全可靠。 二、结构简图(如图1):
三、操作步骤 步骤1.根据如下指示牌先伸出后横,然后伸出后左右脚及前左右脚 如图2: 步骤2.按住上述操作指示牌的“升臂操作”换向阀向里推,然后准备 操作各臂; 步骤3.操作各臂时分为站臂操作和吊栏操作 H 價T"wf In 弔 Gmimk Hrm £ 后右 JD 磁略 后榛 in 右ai 丁左岂 3dlh Mr ,JQ 啊■r H| ' ?囚 ■ ■*JJ _ r 1 x . 亠 呼 w ?? # ■ EH L L L 支落亍> mu 丨* \ j j- fiuppenfiQ L*? . j g 4 W i? unww-*" — ■ wh teta A r£6:先钟出盍BL : h lifi rai 胃空作业车2損作指示 牌 、
高空作业车操作安全规范(正式)
编订:__________________ 单位:__________________ 时间:__________________ 高空作业车操作安全规范 (正式) Standardize The Management Mechanism To Make The Personnel In The Organization Operate According To The Established Standards And Reach The Expected Level. Word格式 / 完整 / 可编辑
文件编号:KG-AO-8533-92 高空作业车操作安全规范(正式) 使用备注:本文档可用在日常工作场景,通过对管理机制、管理原则、管理方法以及管理机构进行设置固定的规范,从而使得组织内人员按照既定标准、规范的要求进行操作,使日常工作或活动达到预期的水平。下载后就可自由编辑。 采用液压传动的载人高空作业,是当代先进的物种机械设备。施工人员操作不妥或安全措施未落实,很容易产生事故,为了安全,特制订如下操作规范: 一、行车 汽车驾驶员必须持有有效行车执照。 附加变速箱必须脱离液压油泵。 注意桥梁、隧道通行高度。 车速一般不超过30公里/小时,郊区不超过40公里/小时。 二、作业 停车位置选择应是坚实地面,整车倾斜度不大于3°,并开启警示灯,车前后6米处各设置反光标示墩。 作业高度与风力(鲍福特):风力5级及以下适宜高度10米以下作业;风力4级及以下适宜高度11-20
米以下作业;风力3级及以下事宜高度21-30米以下作业。 启动油泵,踩下汽车离合器,拉上手刹车,变速箱挂空挡,扳动液压油泵离合拉杆,使液压油泵处于工作状态。 液压油泵运转2-5分钟后,方可操纵各动作手柄。 高空作业车的操作,应经培训并持有操作上岗证人员负责。 操作人员要精神集中,防止误操作并严禁酒后作业。 首先放下支腿,必要时在支腿掌下放木垫,确保车辆处于水平状态。 操作手柄时要平稳,切忌急速迅猛,以免导致作业臂惯性摆动过大及意外事故。 要严格按照设备规定的技术参数及作业范围作业。 作业斗(平台)上工作人员要系好安全带、安全帽、穿绝缘鞋,车下操作及工作人员佩戴安全帽、穿反光背心及绝缘鞋。
登高车操作规程通用版
操作规程编号:YTO-FS-PD475 登高车操作规程通用版 In Order T o Standardize The Management Of Daily Behavior, The Activities And T asks Are Controlled By The Determined Terms, So As T o Achieve The Effect Of Safe Production And Reduce Hidden Dangers. 标准/ 权威/ 规范/ 实用 Authoritative And Practical Standards
精品规程范本 编号:YTO-FS-PD475 2 / 2 登高车操作规程通用版 使用提示:本操作规程文件可用于工作中为规范日常行为与作业运行过程的管理,通过对确定的条款对活动和任务实施控制,使活动和任务在受控状态,从而达到安全生产和减少隐患的效果。文件下载后可定制修改,请根据实际需要进行调整和使用。 1、上岗前,按规定穿戴好个人劳动保护用品,严禁酒后上班。 2、下坡时,不许使用紧急制动。 3、行走车速规定:进入工作面时,或道路条件不好,车速不得超过5km/h 。 4、车辆在行驶中,驾驶室外的任何部位不得站人。 5、车辆进入工作面,应停在合适的位置,放下支腿,调整好水平后,方可升起工作平台,并插好保险销,严禁不放支腿升起作业平台。 6、工作时,必须装好平台栏杆,再进行工作。 7、工作完毕,先放下平台,再收回支腿。 8、遇到雷雨、暴风天气时,应立即停止工作,降下平台。 9、检查销子是否可靠,液压管路是否完好,液压油是否足够等。 该位置可输入公司/组织对应的名字地址 The Name Of The Organization Can Be Entered In This Location
高空作业车使用规范
高空作业车使用规程 1.目的 为确保安全使用高空作业车,规范高空作业车的使用、操作,做好高空作业车的日常维护保养工作,提高设备的完好率,特制订本规程。 2.职责划分 机电保障部负责的高空作业车的使用管理、日常操作和维护保养工作,并负责对使用、操作规程的制定、修改和监督工作。 各单位需使用高空作业车,需填写《高空作业车使用申请表》报候管公司领导批准,由机电保障部安排使用。 3.操作 3.1操作高空作业车人员必须身体健康。凡患有精神病、癫痫病及经医师鉴定患有高血压、心脏病和48岁以上施工人员等不宜操作高空作业车。凡发现工作人员有饮酒、精神不振时,禁止操作高空作业车。 3.2 使用高空作业车必须配置经过专门培训,考试合格,持证上岗的专业操作人员。未达到规定的使用条件不得强行作业。 3.3高空作业车操作人员必须按照机械设备的保养规定,在执行各项检查和保养后方可启动高空作业车。 工作前应检查高空作业车的工作范围,柴油、液压油液面等,清除妨碍高空作业车回转及行走的障碍物。 禁止在发动机运转情况下填加燃油,填加燃油时不得溅出。 禁止在工作状态下填加液压油。 3.4高空作业车作业前,工作负责人应向操作人员,进行技术和安全交待,内容应包括:工作内容及要求;安全注意事项及危险点;如安全帽.安全带是否配套齐全.工作是否有精神.人员分工情况及责任范围。工作负责人除要对车况和操作人员进行检查以外,还要负责查看地形环境、起降是否符合安全技术措施的要求或事先制定的工作方案,如有出入,则应制定出相应的措施后方能开始工作。 3.5工作平台上的操作人员应佩带安全带,安全带应就近挂在钢结构架上。 3.6高空作业车登高作业应由专业人员负责人进行指挥,负责人应按照规定信号与升降平台操作工进行联系。发出的信号必须清楚、准确,便随时观测地面情况。 作业时必须配备专职地面指挥人员,不负责其它工作;配备两台对讲机,作业车平台上作业人员持一台,地面指挥人员持一台。地面指挥人员和作业人员用对讲机对话,对讲机设专用频道,无对讲机或信号不好严禁施工。
高空作业车使用说明书
高空作业车使用说明书 一、概述 湖北楚胜汽车高空作业车以东风小霸王、江铃五十铃、福田奥铃、东风140、东风145 系列等底盘(也可采用其他车辆改装),全回转三折臂式液压多功能工程作业车,它能将工作人员平稳,安全的送到14-20 米的高空作业,进行维修、安装、清洗、摄影、造船、化工、电力、剪枝、更换路灯及其他工程抢修作业。该车的主臂上还设有起重结构,故该车的使用领域较宽。 该车驾驶室外型美观,内部舒适,可载(座)3-6 人,整车外形尺寸小于国内同类产品,整车移动方便,能适合狭窄的地段,小街小巷作业。该车的上臂、下臂、回转和起重液压系统均为独特无级调速系统,具有节能和动作灵活,平稳安全可靠的特点。该车的支腿分单独、可调,能实现整车在平路上调平。该车液压和电器控制系统均设有各种限位装置及发动机紧急熄火装置。能在操作人操作失误,出现故障自动切断电源或紧急停止发动机,及时停止危险动作,确保安全可靠。该车电动操作系统均采用防水开关,避免了开关易进水,锈蚀漏电的问题,工作斗采用管状工作斗,外形美观,在工作斗和转台实行双位置操作,使用方便,维修简便,安全可靠。 二、结构简图(如图1):
三、操作步骤 步骤1.根据如下指示牌先伸出后横,然后伸出后左右脚及前左右脚,如图2: 步骤2.按住上述操作指示牌的“升臂操作”换向阀向里推,然后准备操作各臂; 步骤3.操作各臂时分为站臂操作和吊栏操作
步骤4.操作各臂时最先升小臂举升一定角度,如图3: 步骤5.然后将二臂举升一定角度,如图4: 步骤6.再将大臂举升一定角度,如图5: 步骤7.将小臂油缸伸出到最大高度,如图6: 步骤8.接着再将二臂举升一定角度,如图7:
车载式高空作业平台的结构设计
车载式高空作业平台的结构设计 1.2 高空作业机械的国内外发展概况 1.2.1 高空作业机械的国外发展状况 高空作业车发展起步较早的欧美等发达国家和地区,从20世纪20年代就开始研制,发展历史久远,生产技术也很成熟,具有生产技术水平高、作业车的作业高度大、规格齐全、结构型式丰富、功能多样等优点。总体来看,技术和市场均已很成熟,产品能够进行高空作业、抢险、救援、消防等复杂工作,作业平台的最大载荷可达500kg,最大作业高度已经超过100m,这是我国目前无法设计达到的高度,同时具有各种安全保护措施,很好的保障了工人的安全。大型产品特点是科技含量高、研制与生产周期较长、投资大、市场容量有限,但市场竞争相对较少,产品的利润相对较高。如美国Genie公司、JLG公司和法国HAULOTTE公司在高空作业平台产品都形成了系列化,与此同时,产品更新换代的周期明显缩短。这大大提高了企业在国际市场中的竞争能力和企业的抗风险能力。 1.2.2 高空作业机械的国内发展状况 我国产品在质量和性能上与国外优秀产品虽然存在一定的差距,但是随着科技的不断发展,产品的功能和性能已经逐渐趋于同质化[3],因此必须通过对我国高空作业机械产品与国外先进企业产品进行分析和比较,找出发展问题的之所在,并提出相应的解决方案。我国高空作业平台的使用范围与国外相比来说还比较窄,使用较多的有路灯、交通、园林等部门,而在有发展前途的电力、电信及有线电视系统使用较少,市场远远没有挖掘和培育出来[3]。目前市场上的主要产品仍然是体积教大,对作业场地要求较高的拖车式或车载式高空作业车,而我国市场上的车载式高空作业车多为价格昂贵的国外进口产品或中外合资企业的产品,我国本土研发的设备极少,因此我们开发研制出拥有自主产权的高性能车载式高空作业平台具有很强的发展战略意义。 我们应提高工程设计效率和品质,节约设计成本,缩短设计周期[4-5]。而传统设计在设计一个工程结构的时候,首先要采用类比方法确定设计方案的初稿,然后对其结构进行分析,画出图纸,然后对重要部件进行强度的校核,并根据校核的结果重新修改设计方案,一般往往要进行多次分析校核和调整才能得到优秀的设计方案。这种设计方法的设计周期长、代价高、效率低,且所得到的方案多数不是最优方案[6-7]。只有加大行业技术创新力度,开发先进的高空作业机械,满足用户的差别化和个性化需求,为用户精细化服务,才能提高中国产品的市场竞争能力。 在我国实际工作过程中,人们对于安全性和劳动条件提出了更高的要求,尤其是在高空作业中,原始的脚手架、吊篮等安全系数较低的工作方式将会越来越少,而对于高空作业机械的需求必将越来越多[8]。另一方面,中国造船业逐渐成为世界第一,对于大型车载式高空作业平台的需求急剧增加。据不完全统计,仅中国造船行业在2009年约需六七百台
剪刀车操作说明
剪刀高空作业车操作规范 、注意事项: 1、 2、 3、未经操作培训的人员不得操作该高空作业车; 禁止在有台阶、坑洞、松软或不平淡的地面行驶; 禁止在斜坡上升起工作平台或把生气的工作平台驾驶到斜坡上; 4、 5、 6、 7、禁止在大风情况下生气工作平台; 该作业车限载 4 人,严禁超载; 伸缩平台伸出时,伸缩平台上只可承载 1 人; 正常情况下,高空作业车上有人工作时,严禁地面人员对该车进行任何操作; 8、细心操作,谨慎行驶。 二、使用规程: 1、检查轮胎、机械、液压系统无明显故障,所有操作开关都在正常位置; 2、打开工作平台后部梯架左侧的电源总开关; 3、通过工作平台后部进入操作平台甲板,并栓上入口链条; 4、拉出急停按钮(EMERGENCY STOP将钥匙插入钥匙开关,并将其打到(ON)位;
5、观察电压表的指针是否在绿色区域否则对电瓶进行充电; 6、将举升行 驶开关打到行驶位置,一只手按住操作面板左侧的允动开关,不要松开,另一 只手提起操作手柄上的锁定环,将操作手柄往前推,车向前走;将操作手柄往后拉,则车向后走,转弯则由操作手柄上方按钮左右键按住进行控制; 7、将高空作业车驾驶到所需要的位置后,松开操作手柄和预案需开关,将举升行驶开关打到举升位(LIFT,一只手按住操作面板左侧的允动开关,不要松开,另一只手提起操作手柄上的锁定环,将操作手柄往前推,则工作平台向上举升,将操作手柄往后拉,则工作平台下降; 8、进入预定高度后,松开操作手柄和允动开关,将举升行驶开关打到空位,即可开始工作; 9、如果要使用平台上的伸缩平台,可将举升行驶开关打到举升位 (LIFT,然后左手扳动并保持住伸缩平台操作面板左边的开关,右手扳动操作面板右边的开关,向前则平台渗出,向后则平台缩回。 10、如果行驶中有斜坡,可将爬坡开关从OFF位打到爬坡位,以获取更大的驱动力。 三、关闭规程: 1、 2、 3、使用完后,收回伸缩平台并将平台完全降下,行驶到停放位;将要是转到OFF位,取出钥匙; 按下急停按钮(EMERGENCY STQP关闭工作平台后部梯架。 四、应急处理措施: 1、6832 型剪刀车(红色): 1 )当剪刀车处于高空时,操作手柄失效,电控方法应急处理:① 、将工 作平台后部梯架右侧的应急电源开关由常开位扳动至闭合位(往右扳动45°);
高空作业车国家标准
GB/T 9465—2008(2008-02-03发布 2008-07-01实施)代替CB/T 9465.1~9465.3—1988 前言 本标准代替GB/T 9465.1—1988《高空作业车分类》、GB/T 9465.2—1988《高空作业车技术条件》和GB/T 9465.3—1988《高空作业车试验方法》。 本标准与GB/T 9465.1~9465.3三个标准相比主要变化如下: ——最大作业高度改为100m,并提出不适用产品的范围; ——增加了额定载荷系列2000 kg、3000 kg、4000 kg、5000 kg; ——增加了型号中绝缘型高空作业车的标记; ——增加了高空作业车工作条件; ——结构安全系数、平台的升降速度、回转速度参照IS0 16368:2003国际标准的要求; ——增加了高空作业车调平机构要求; ——增加了绝缘性能的试验方法。 本标准由中国机械工业联合会提出。 本标准由北京建筑机械化研究院归口。 本标准起草单位:北京建筑机械化研究院、杭州爱知车辆工程有限公司、杭州赛奇高空作业机械有限公司、徐州海伦哲专用车辆有限公司、北京京城重工机械有限责任公司。 本标准主要起草人:张华、陈继军、陈建平、张秀伟、白日、张海云、张梅嘉。 本标准所代替标准的历次版本发布情况为: ——GB/T 9465.1—1988、GB/T 9465.2—1988、GB/T 9465.3—1988。 高空作业车 Vehicle-mounted mobile elevating work platform 1 范围 本标准规定了高空作业车的术语和定义、分类、技术要求、试验方法、检验规则、标志、包装、运输和贮存等。 本标准适用于最大作业高度不大于100 m的高空作业车(以下简称作业车)。 本标准不适用于高空消防车、高空救援车。 2 规范性引用文件 下列文件中的条款通过本标准的引用而成为本标准的条款。凡是注日期的引用文件,其随后所有的修改单(不包括勘误的内容)或修订版均不适用于本标准,然而,鼓励根据本标准达成协议的各方研究是否可使用这些文件的最新版本。凡是不注日期的引用文件,其最新版本适用于本标准。 GB/T 507 绝缘油击穿电压测定法 GB 1589 道路车辆外廓尺寸、轴荷及质量限值 GB/T 3766 液压系统通用技术条件(GB/T 3766—2001,eqv ISO 4413:1998) GB 7258 机动车运行安全技术条件 GB/T 7935 液压元件通用技术条件 GB/T 9969.1 工业产品使用说明书总则
高空作业车安全技术操作规程(通用版)
( 操作规程 ) 单位:_________________________ 姓名:_________________________ 日期:_________________________ 精品文档 / Word文档 / 文字可改 高空作业车安全技术操作规程 (通用版) Safety operating procedures refer to documents describing all aspects of work steps and operating procedures that comply with production safety laws and regulations.
高空作业车安全技术操作规程(通用版) 一、熟悉掌握本工种专业技术及规程。 二、年满18岁,经体格检合格后方可从事高空作业。凡患有高血压、心脏病、精神病和其它不适于高空作业的人,禁止登高作业。 三、距地面三公尺以上,工作斜面坡度大于45度,工作地面没有平稳的立脚地方或有震动的地方,应视为高空作业。 四、防护用品要穿戴整齐,裤脚要扎住,戴好安全帽,不准穿光滑的硬底鞋。要有足够强度的安全带,并应将绳子牢系在坚固的建筑结构件上或金属结构架上,不准系在活动。 五、检查所用的登高工具和安全用具(如安全帽、安全带、梯子、跳板、脚手架、防护板、安全网等),必须安全可靠,严禁冒险作业。 六、高空作业区地面要划出禁区,用栏杆围起,并挂上“闲人免进”、“禁止通行”等警示牌。
七、靠近电源(低压)线路作业前,应先联系停电。确认停电后方可进行工作,并应设置绝缘挡壁。作业者最少离开电线(低压)2公尺以外。禁止在高压线下作业。 八、高空作业所用的工具、零件、材料等必须装入工具袋。上下时手中不得拿物件,并必须从指定的路线上下,不得在高空投掷材料或工具等物,不得将易滚易滑的工具、材料堆放在脚手架上,不准打闹。工作完毕应及时将工具、零星材料、零部件等一切易坠落物件清理干净,以防落下伤人,上下大型零件时,应采用可靠的起吊机具。 九、要处处注意危险标志和危险地方。夜间作业,必须设置足够的照明设施,否则禁止施工。 十、严禁上下同时垂直作业。若特殊情况必须垂直作业,应经有关领导批准,并在上下两层间设专用的防护棚或者其他隔离设施。 十一、严禁坐在高空无遮栏处休息。防止坠落。 十二、卷扬机等各种升降设备严禁上下载人。 十三、在石棉(玻璃)瓦屋面工作时,要用梯子等物垫在瓦上行
高空作业车操作规程
高空作业车安全操作规程 一、未经培训合格并获得操作、驾驶资格证书的人员严禁操作高空 作业车。 二、行驶前准备 1、操作前应仔细阅读说明书,了解驾驶、使用要求,掌握整车行驶性能参数。 2、行驶前按底盘使用要求进行底盘油位、水位等检查。 3、检查燃油箱油位。(需考虑高空和起重作业的油耗) 4、检查液压油位,确保液压箱中的油量达到规定值。 5、检查上、下臂是否落位,不得悬空。 6、检查工作平台内是否有遗漏的的工具或物品,如果有,及时取下。在车辆行驶时, 工作平台内部的放置没有固定的物品。 7、检查支腿是否完全收回。 8、检查取力操纵杆是否已使取力齿轮与汽车变速箱脱离 三、工作地点的选择 1、工作场所地面允许的最大倾斜角为5°。需要在斜坡上作业是应将车头对准坡顶方 向停放。 2、在公路上作业时应使车体与道路边缘距离不小于760mm(支腿伸出长度),并及时 打开危险警告信号灯。 3、作业车不得在有火灾、爆炸危险的区域、腐蚀性的环境工作。 4、作业车工作的温度范围是-25℃~40℃,不允许在此范围外的温度下工作。 5、环境相对湿不大于90%(25℃)。 6、光线暗淡或能见度低时禁止工作。 7、海拔高度不超过1000m。 8、风力超过6级时,作业车不得工作。 9、当工作范围内有电线通过时,应当始终保持足够的安全距离。 10、作业车工作室应与悬崖和沟渠保持足够的安全距离。
11、雷雨天气作业车严禁工作。 四、其他安全事项 1、严禁超载作业,严禁作业人员不系安全带进行空中作业。 2、操作时禁止采用凳子梯子等垫高方式工作,不得将身体重心探出工作平台底板外。 3、严禁从工作工作平台上或者往工作平台扔物品。 4、严禁起重和登高同事作业。 5、严禁用吊钩启起吊埋在地下情况不明的物体,严禁横向拖拉重物,以免超出负荷引 发事故。 6、工作时,起重臂下严禁站人。 7、进行高空作业时,应有一名操作人员在车辆旁边,随时准备进行应急操作。 8、不得改变液压阀的调定值。 9、严禁在取力齿轮未脱离状态下行驶车辆。
高空作业车的管理制度实用版
YF-ED-J9268 可按资料类型定义编号 高空作业车的管理制度实 用版 In Order To Ensure The Effective And Safe Operation Of The Department Work Or Production, Relevant Personnel Shall Follow The Procedures In Handling Business Or Operating Equipment. (示范文稿) 二零XX年XX月XX日
高空作业车的管理制度实用版 提示:该管理制度文档适合使用于工作中为保证本部门的工作或生产能够有效、安全、稳定地运转而制定的,相关人员在办理业务或操作设备时必须遵循的程序或步骤。下载后可以对文件进行定制修改,请根据实际需要调整使用。 高空作业车管理制度(high altitude work vehicle) 依据安全管理的客观要求,运用安全与事故的运动规律和预防、控制事故的规律,为了改变人的异常行为、物的异常状态,以及人与物的异常结合,从本质上超前有效预防、控制高处坠落事故,分为具体预防、控制和综合预防、控制。 1高处坠落事故的具体预防、控制高处坠落事故的具体预防、控制,是依据不同类型高处坠落事故的具体原因,有针对性的提出了对每类高处坠落事故进行具体预防、控制要点。
(1)洞口坠落事故的预防、控制要点:预防留口、通道口、楼梯口、电梯口、上料平台口等都必须设有牢固、有效的安全防护设施(盖板、围栏、安全网);洞口防护设施如有损坏必须及时修缮;洞口防护设施严禁擅自移位、拆除;在洞口旁操作要小心,不应背朝洞口作业;不要在洞口旁休息、打闹或跨越洞口及从洞口盖板上行走;同时洞口还必须挂设醒目的警示标志等。 脚手架上坠落事故的预防、控制要点;要按规定搭设脚手架、铺平脚手板,不准有探头板;防护栏杆要绑扎牢固,挂好安全网;脚手架载荷不得超过270kg/m2;脚手架离墙面过宽应加设安全防护;并要实行脚手架搭设验收和使用检查制度,发现问题及时处理。
凯帆高空作业车操作规程
高空作业车安全操作规程 1.高空作业车的行驶 1.1汽车驾驶员必须持有B2照以上行车执照,行驶前仔细阅读过配套底盘的汽车使用说明书,已掌握操作要领,并按说明书要求对车辆进行了必要检查和保养。 1.2行驶前检查取力器操作手柄在分离状态,使副加变速箱脱离液压油泵。(车内蜂鸣器会在取力器接通状态下报警提示)。 1.3注意桥梁、隧道通行高度。 1.4本车已处于满载状态,在凹凸不平路面行驶车速一般不得超过20公里/小时,高速公路行驶不得超过90公里/小时,长距离行驶或路面状态不良时应用专用绑带固定上下臂在托架上。 1.5行驶前工作臂必须收足到位,不得悬空,下臂必需置于托架中,各支腿必须完全收回。 1.6工作斗和后箱平台禁止载人员,工作斗内应保证为无载荷状态。 2.高空作业车操作前的检查 2.1停车位置应选择坚实平整地面,整车横向倾斜度不大于3°,纵向不大于5°,并开启警示灯,必要时开启警报。 2.2确认风力满足作业高度要求: 风力6级及以下适宜高度10米以下作业; 风力5级以下适宜高度11~14米以下作业; 2.3已设置安全作业区,地面要有1-2人专责监护,负责观察高空作业安全状态、提醒往来车辆避让。 2.4评估确认作业半径内及上方障碍物的危险性满足安全作业要求。 2.5确认车上各连接件紧固可靠,发动机及液压系统工作正常,安全警报系统工作正常。严禁操纵带故障的高空车进行作业。 2.6确认各处行车紧固绑带已松开。 3.高空作业车的操作 3.1高空作业车的操作,应经培训并持有操作上岗证人员负责。操作人员要精神集中,防止误操作并严格禁酒后作业。 3.2踩下汽车离合器,拉上手刹车,变速箱挂空挡,扳动取力器拉杆至结合位置后慢松开离合器踏板,使液压油泵处于工作状态,确认没有噪音及异常现象。 3.3新车或环境温度较低时,让液压油泵在空载状态下运转5~8分钟提高油温后,方可操纵各动作手柄。