自适应噪声消除算法的性能比较与仿真

第9卷 第19期 2009年9月167121819(2009)1925835205
科 学 技 术 与 工 程
Science Technol ogy and Engineering
Vol 19 No 119 Oct .2009
Ζ 2009 Sci 1Tech 1Engng 1
自适应噪声消除算法的性能比较与仿真
江清潘 常太华3
朱红路 马 军
1
(华北电力大学控制科学与工程学院,北京102206;湖北省汉江河道管理局1,潜江433100)
摘 要 在信号处理中,噪声往往是非平稳和随时间变化的,传统方法很难解决噪声背景中的信号提取问题。通过对自适应噪声消除原理的研究,介绍了基于参考信号和基于预测原理的两种自适应噪声消除(ANC,Adap tive Noise Cancellati on )方法,分析对比了基于最小均方(L M S,LeastMean Squares )、递推最小二乘(RLS,Recursive Least Squares )和平方根自适应滤波(QR
-RLS,recursive least squares based on QR decompositi on )三种噪声消除算法的性能。仿真结果表明:这几种算法都能从高背景
噪声中有效地抑制干扰提取出有用信号,显示出了良好的收敛性能。相比之下,RLS 算法和QR -RLS 算法呈现出更快的收敛速度、更强的稳定性和抑噪能力。
关键词 自适应噪声消除 自适应滤波器 噪声中图法分类号 TP27412; 文献标志码 A
2009年6月15日收到国家自然科学基金(50776030)资助
第一作者简介:江清潘(1986—),男,福建三明人,硕士在读,研究方向:电力生产过程建模、燃烧优化。E 2mail:jqpgg m @g mail 1com
jqphd2007@yahoo 1cn 。
3
通信作者简介:常太华(1951—),女,山西榆社人,教授,研究方向:
信息融合及检测新技术。
在信号处理领域中噪声消除是一个非常重要的问题,对噪声环境中系统的正常工作有着很大的影响。隐藏在有用信号中的背景噪声往往是非平稳且随时间变化的,信号和噪声的统计特性往往无法知晓,而且背景噪声中的有用信号往往微弱而不稳定,此时采用传统方法很难解决噪声环境中的信号提取问题
[1]
。近年来自适应噪声消除(ANC )系
统成为消除噪声的研究热点,利用自适应滤波器具有在未知环境下良好运行并跟踪输入统计量随时间变化的能力,通过不断调整抽头权系数来适应发生变化的信号和噪声的统计特性,达到消除噪声干扰的目的
[2]
。
根据噪声知识的了解情况,ANC 系统可采用基于参考信号和基于预测原理的两种噪声消除方法。在噪声相关知识足够了解的情况下可选取一个与噪声信号相关的参考信号进行噪声干扰对消。在
噪声相关知识了解不够充分时可根据自适应滤波器的预测原理,利用噪声信号的时间不相关性来达到噪声消除的目的。
ANC 系统的核心是自适应滤波器,通过自适应
算法对滤波器权系数进行调整以实现最佳滤波。不同的自适应滤波器算法具有不同的收敛速度、稳态失调和算法复杂度,基于上述两种噪声消除方法对比分析了基于L MS 、RLS 和QR -RLS 三种算法的噪声消除效果。仿真结果表明,这几种算法都能从高背景噪声中提取有用信号。相比之下,在基于参考信号的方法中,RLS 算法体现出了更好的收敛性能和抑制干扰的能力。在基于预测的消噪方法中,QR -RLS 算法呈现出了更快的收敛速度、更强的稳
定性和抑噪能力。
1 自适应噪声消除原理及算法
111 噪声消除原理
自适应滤波器噪声消除系统是以噪声干扰为处理对象,将其抑制或者进行衰减,以提高输出端的信噪比质量。分析了基于参考信号和基于预测原理的两种自适应噪声消除方法。
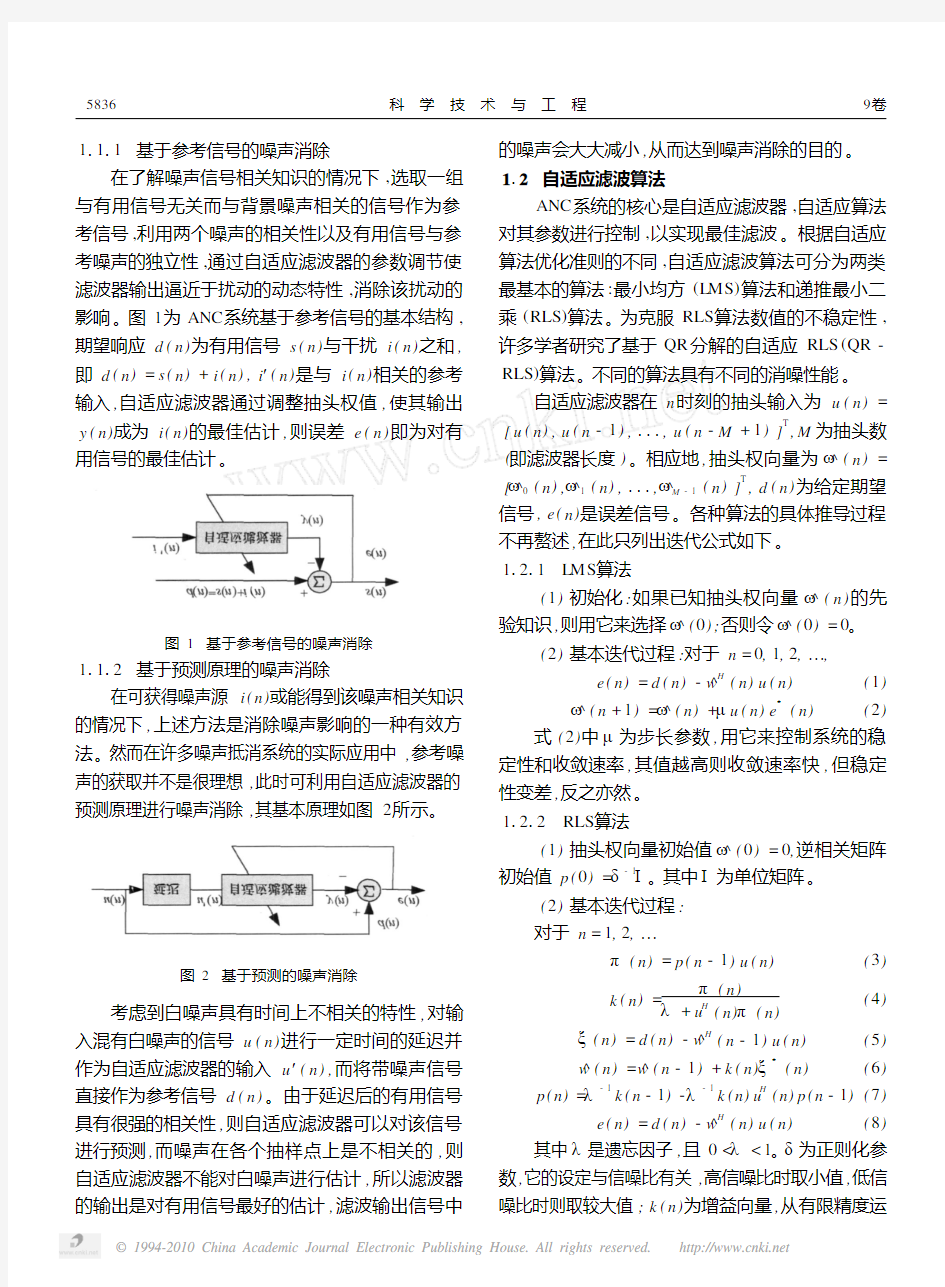
11111 基于参考信号的噪声消除
在了解噪声信号相关知识的情况下,选取一组与有用信号无关而与背景噪声相关的信号作为参考信号,利用两个噪声的相关性以及有用信号与参考噪声的独立性,通过自适应滤波器的参数调节使滤波器输出逼近于扰动的动态特性,消除该扰动的影响。图1为ANC 系统基于参考信号的基本结构,期望响应d (n )为有用信号s (n )与干扰i (n )之和,
即d (n )=s (n )+i (n ),i ′
(n )是与i (n )相关的参考输入,自适应滤波器通过调整抽头权值,使其输出
y (n )成为i (n )的最佳估计,则误差e (n )即为对有
用信号的最佳估计
。
图1 基于参考信号的噪声消除
11112 基于预测原理的噪声消除
在可获得噪声源i (n )或能得到该噪声相关知识的情况下,上述方法是消除噪声影响的一种有效方法。然而在许多噪声抵消系统的实际应用中,参考噪声的获取并不是很理想,此时可利用自适应滤波器的预测原理进行噪声消除,其基本原理如图2
所示。
图2 基于预测的噪声消除
考虑到白噪声具有时间上不相关的特性,对输入混有白噪声的信号u (n )进行一定时间的延迟并
作为自适应滤波器的输入u ′
(n ),而将带噪声信号直接作为参考信号d (n )。由于延迟后的有用信号具有很强的相关性,则自适应滤波器可以对该信号进行预测,而噪声在各个抽样点上是不相关的,则自适应滤波器不能对白噪声进行估计,所以滤波器的输出是对有用信号最好的估计,滤波输出信号中
的噪声会大大减小,从而达到噪声消除的目的。112 自适应滤波算法
ANC 系统的核心是自适应滤波器,自适应算法
对其参数进行控制,以实现最佳滤波。根据自适应算法优化准则的不同,自适应滤波算法可分为两类最基本的算法:最小均方(L MS )算法和递推最小二乘(RLS )算法。为克服RLS 算法数值的不稳定性,许多学者研究了基于QR 分解的自适应RLS (QR -RLS )算法。不同的算法具有不同的消噪性能。
自适应滤波器在n 时刻的抽头输入为u (n )=
[u (n ),u (n -1),111,u (n -M +1)]T
,M 为抽头数(即滤波器长度)。相应地,抽头权向量为^ω(n )=[^ω0(n ),^ω1(n ),111,^ωM -1(n )]T
,d (n )为给定期望
信号,e (n )是误差信号。各种算法的具体推导过程不再赘述,在此只列出迭代公式如下。11211 L MS 算法
(1)初始化:如果已知抽头权向量^ω(n )的先
验知识,则用它来选择^ω(0);否则令^ω(0)=0。
(2)基本迭代过程:对于n =0,1,2,…,
e (n )=d (n )-^w H
(n )u (n )
(1)^ω(n +1)=^ω(n )+μu (n )e 3
(n )
(2)
式(2)中μ为步长参数,用它来控制系统的稳定性和收敛速率,其值越高则收敛速率快,但稳定性变差,反之亦然。11212 RLS 算法
(1)抽头权向量初始值^ω(0)=0,逆相关矩阵
初始值p (0)=δ-1
Ι。其中Ι为单位矩阵。
(2)基本迭代过程:
对于n =1,2,…
π(n )=p (n -1)u (n )
(3)k (n )=
π(n )
λ+u H (n )π(n )
(4)ξ(n )=d (n )-^w H
(n -1)u (n )
(5)^w (n )=^w (n -1)+k (n )ξ3
(n )
(6)p (n )=λ-1
k (n -1)-λ-1
k (n )u H
(n )p (n -1)(7)
e (n )=d (n )-^w H
(n )u (n )
(8)
其中λ是遗忘因子,且0<λ<1。δ为正则化参数,它的设定与信噪比有关,高信噪比时取小值,低信噪比时则取较大值;k (n )为增益向量,从有限精度运
6385科 学 技 术 与 工 程9卷
算的角度考虑,该值计算分两步进行,先计算中间量π(n ),再计算k (n );ξ(n )为先验估计误差。11213 QR -RLS 算法
(1)初始化:相关矩阵Φ-1
2(0)=δ1
2Ι,逆相关矩
阵p (0)=0。
(2)基本迭代过程:
对于n =1,2,…
λ1/2Φ1/2(n -1) u (n )λ1/2p H (n -1)d (n )0
T
1
Θ(n )=
Φ1/2(n )
p H
(n )ξ(n )γ1/2
(n )
u H (n )Φ
-H /2
(n )
γ1/2
(n )
(9)
^w H
(n )=p H
(n )Φ-1
2(n )(10)e (n )=d (n )-^w H
(n )u (n )
(11)
其中λ是指数加权向量,δ为正则化参数,Θ(n )为酉旋转矩阵,它对前阵列中输入数据矩阵
u (n )的元素进行运算,产生后阵列顶行的零块项。
ξ(n )为先验估计误差。
2 仿真实验
211 基于参考信号的噪声消除
有用信号取振幅为515
的正弦信号,如式(12)所示。
s (n )=515sin (0102t )
(12)
将该信号叠加带限高斯白噪声i (n )构成待消噪的混叠信号并作为自适应滤波器的期望输出
d (n ),带噪声信号与原始信号对比如图3所示。
图3 带噪声信号与原始信号
选择一组与白噪声相关的信号作为参考输入
i ′
(n ),利用图1的消噪原理对有用信号进行提取,提取结果如图4所示。可以看出,三种算法都能从
图
4 基于参考信号的三种算法消噪结果
强背景噪声中提取出有用信号。相比之下,RLS 算法体现出了更好的收敛性能以及抑制干扰的能力,达到了较好的消噪效果。图5显示了三组算法在噪声处理过程中的均方误差曲线,可以看出,RLS 算法在提取信号时,收敛速度快、估计精度高并且稳定性好,可以很好的抑制噪声干扰加速收敛过程,体现出较强的自适应能力。而LMS 算法和QR -RLS 算法也能将有用信号提取出来,但在估计精度和收敛速度上较RLS 算法要差些。
图5 三种算法消噪的均方误差
7
38519期江清潘,等:自适应噪声消除算法的性能比较与仿真
212 基于预测原理的噪声消除
取式(12)中的原始正弦信号为有用信号,将上述方法中的带噪声信号作为待消噪信号u (n ),利用图2中的原理,将u (n )作为自适应滤波器的期望信号d (n )进行噪声消除,得到图6所示的噪声消除结果
。
图6 基于预测原理的三种算法消噪结果
图7显示了三种算法在迭代过程中的均方误差。由图6和图7可以看出,三种算法都能较好的提取出有用信号。相比之下,用QR -RLS 算法提取到的正弦信号与标准的正弦信号几乎完全一致,收敛速度快、估计精度高并且稳定性好,可以明显抑制扰动且均方误差几乎为0,达到了很好的消噪效果。RLS 算法在经过初期的自适应收敛过程后,快速地跟踪了输入信号的动态特性,很好的恢复了原始正弦信号,这点从均方误差上可以很好的看出,除了初始阶段有较大的均方误差,随后其值也几乎为0。而LM S 自适应滤波算法虽然也能很好的将有用信号提取出来,并具有很好的稳态性能,但相比前两个算法而言在估计精度上还有待改善。
3 结束语
自适应噪声消除(ANC )系统通过滤波器自身权系数的调节来适应发生变化的信号和噪声的统计特性,具有自学习能力强、计算量小、
实时处理好
图7 三种算法消噪的均方误差
等特点。本文介绍了基于参考噪声和基于预测原理的两种自适应滤波器噪声消除方法,并分析对比了L MS 、RLS 和QR -RLS 三种不同算法的噪声消除性能。仿真结果表明,在噪声相关知识能够了解的
情况下采取基于参考噪声的消噪方法具有很好的效果,三种算法都能提取出有用信号,相比之下,RLS 算法体现出了更好的收敛性能和抑制干扰的能
力。在噪声的相关知识了解不够充分时可采取基于预测的消噪方法,仿真结果证实了该方法的有效性,三种算法都能从强背景噪声中提取有用信号。相比之下,QR -RLS 算法呈现出了更快的收敛速度、更强的稳定性和抑噪能力。
参 考 文 献
1 Greenberg J E 1Modified LMS algorithm s f or s peech p r ocessingwith an
adap tive noise canceller 1I EEE Trans on Speech and Audi o Pr ocess 2ing,1998;6(4):338—351
2 Haykin S 1Adap tive filter theory 1Ne w Jersey:Prentice Hall,I nc,20023 徐 蕾,孙金生,王执铨,等1自适应滤波的研究新方向1控制与
决策,1999;14(1):8—12
4 Greenberg J E,et al 1Modified L MS tlgorithm s f or s peech p r ocessing
with an adap tive noise canceller 1I EEE Transacti ons on Speech and Speech and Audi o Pr ocessing .S1063—6676.1998;6(4):338—3515 Moustakides G V 1Study of the transient phase of the forgetting fact or
RLS 1I EEE Trans 1Signal Pr ocessing,1997;45:2468—2476
6 殷文铮,杜 旭1基于简化型RLS 算法的延迟改进型噪声抵消
系统模型与实现1电声技术,2006;(2):55—57
8385科 学 技 术 与 工 程9卷
Perfor mance Co m par ison s and S i m ul a ti on s of Adapti ve No ise Cancell a ti on A lgor ithm s
J I A NG Q ing 2pan,CHANG Tai 2hua 3
,Z HU Hong 2lu,MA Jun
1
(Contr ol Science and Engineering College,North China Electric Power University,Beijing 102206,P .R.China;
Hubei Hangjiang R iver Authority,Q ianjiang 433100,P .R.China )
[Abstract] I n the signal p r ocessing,the noise is often non 2s mooth and ti m e 2varying,s o the traditi onal method is diffi 2cult t o s olve the signal extracti on pr oble m fr o m the backgr ound noise 1Thr ough the study on the princi ple of adptive noise cancellati on,t w o de 2noising method that based on reference signal and princi ples of predicti on have been intr oduced,and noise canceling perf or mance of the L MS alg orith m s 、RLS alg orith m s and QR -RLS alg orith m swere co mpared 1The results of co mputer si m ulati ons sho w that all of these adap tive alg orith m s can restrain the disturbance effectively and extract the true signal in str ong backgr ound noise,sho ws a g ood convergence perf or mance 1I n co mparis on,the RLS alg orith m and QR -RLS alg orith m take on faster convergence s peed,str onger stability and str onger ability t o supp ress noise .[Key words] ANC adap tive filtering noise
(上接第5826页)
H i erarch i ca l Extended Stocha sti c Grad i en t A lgor ith m s
for S i n gle 2i n put M uti ple 2output Syste m s
X I A NG L i 2li,L I A O Yu 2wu 1
,X I A O Yong 2s ong
(School of Communicati on and Contr ol Engineering,Jiangnan University,W uxi 214122,P .R.China;
Depart m ent of Physics and Electr onics I nfor mati on Technol ogy 1,Xiangfan University,Xiangfan 441053,P .R.Chian )
[Abstract] According t o the negative gradient search p rinci p le,a hierarchical extended st ochastic gradient (HESG )algorith m is derived f or single 2input multi out put syste m s with the moving average noise .I n order t o i m 2
p r ove the convergence rate,a HESG algorithm with a forgetting fact or is obtained by intr oducing a f orgetting fact or
in the HESG algorithm.The si m ulati on results show that the p r oposed algorithm s work quite well .
[Key words] recursive identificati on para meter esti m ati on st ochastic gradient hierarchical identificati on
(上接第5828页)
H i erarch i ca l Grad i en t Ba sed Itera ti ve I den ti f i ca ti on for M ulti var i a ble Syetem s
HAN He 2qiang,X I E L i
(School of Communicati on and Contr ol Engineering,J iangnan University,W uxi 214122,P .R.China )
[Abstract] According t o the hierarchical identificati on p rinci p le,a hierarchical gradient based iterative algorith m is derived f or multivariabl syste m s with moving average noises .The si m ulati on results indicate that the p r oposed al 2gorithm works quite well .
[Key words] iterative identificati on hierarchical identificati on para meter esti m ati on
9
38519期江清潘,等:自适应噪声消除算法的性能比较与仿真
环境噪音测量方法
环境噪音测量方法 一, 方法概要 本方法系使用符合我国国家标准(CNS 7129)1型噪音计(或称声度表)或国际标准或上述性能以上之噪音计,测量环境中噪音位准之方法. 二, 适用范围 本测量方法适用於一般环境及固定性噪音发生源或移动性扩音设施之噪音位准测量. 三, 干扰 (一) 气象条件,地形,地面情况:噪音之传播会受到气象条件,地形,地面情况等之影响,故测量噪音时需记录天气,测量点附近之风向,风速,温度,相对湿度等之气象条件及地形,地面情况. (二) 由风产生噪音的影响:噪音计之声音感应器直接受到强风时,因风切作用而产生杂音(称为风杂音),严重时无法测量正确值,故在室外测定时,可能会产生风杂音时需加装防风罩.但防风罩也有其可使用范围,如超过使用范围时,应停止测量. .四, 仪器及设备 1.测定器:符合我国国家标准(CNS 7129 C7143)1型之噪音计(以下简称噪音计)或国际电工协会标准Class 1噪音计或上述性能以上之噪音计;原则上以噪音计之听感修正回路A加权测定之. 2. 防风罩(W indscreen):为减少声音感应器测量时风造成之影响,因此必须加套防风罩,其材质一般是由多孔性聚乙烯制成,其可容许风速范围由材料,结构,大小而定. 五, 噪音计使用方法
听感修正回路或称频率加权(Frquency-weighting"A"):本测量方法原则上以听感修 正回路A加权测定之,惟测量时应注记现场测量时所使用之加权名称. 六, 结果处理 (一) 测量报告须列出下列各项: 1, 测量人员姓名,服务单位. 2, 测量日期,测量时间,动特性. 3, 气象状态(风向,风速,气温,大气压力,相对湿度及最近降雨日期). 4, 测量结果. 5, 适用之标准 6, 测量位置(测量点及其高度,声音感应器高度等)与音源相对位置及距离,附简图 及照片,周围之情况(周围之建筑物,地形,地貌,防音设施等,附简图). 7, 噪音发生源之种类与特徵. 8, 测量方法(噪音计(含声音校正器)厂牌,型号,序号,噪音计动特性,取样的时距与 次数及其校正纪录与检定,校正有效期限等). 9, 其他(特殊音源之特性及其随时间变化性,可能影响测量结果之因素等). 10, 测量 期间噪音原始数据应存档备查. 实验数据 XuHao Leq l5 L10 L50 L90 L95 SD LEA 84 69.6 74.7 71.5 69.5 68.4 68.1 1.6 94.4 85 66.8 78.9 69.7 64.2 63.6 63.5 3.8 91.6 Lmax Lmin E 测定时间日期 80.7 68.2 0 0h5m0s 14-07-02 87.7 63.3 0 0h5m0s 14-07-02
采用改进结构特征度度量分析的噪声标准差估计算法
第10卷第2期一一一一一一一一一一一一智一能一系一统一学一报一一一一一一一一一一一一一一一Vol.10?.22015年4月一一一一一一一一一一一CAAITransactionsonIntelligentSystems一一一一一一一一一一一一一Apr.2015 DOI:10.3969/j.issn.1673?4785.201511015 网络出版地址:http://www.cnki.net/kcms/detail/23.1538.TP.20150302.1106.011.html 采用改进结构特征度度量分析的噪声标准差估计算法 王科俊,杨晓飞 (哈尔滨工程大学自动化学院,黑龙江哈尔滨150001) 摘一要:提出了一种基于改进的噪声标准差估计的轮廓波去噪算法,在常用的轮廓波去噪算法基础上提出了新的解决方案三该方案将滤波法与改进的图像结构特征度度量分析算法结合起来,筛选出适合计算噪声标准差的图像子块集合,再用直方图法估计图像噪声标准差,然后将该标准差用于轮廓波去噪三在标准差估计对比试验中,将滤波法二分块法二改进的分块法与文中的标准差估计算法进行对比;在去噪对比试验中,采用基本的小波阈值去噪算法(universal阈值),由小波阈值法引申出的普通轮廓波阈值去噪算法,基于维纳滤波的轮廓波去噪算法,基于系数建模的轮廓波去噪算法与文中算法做对比三实验结果表明:文中算法能够更加精确地估计图像噪声标准差,且去噪效果与普通轮廓波去噪及其他轮廓波去噪算法相比更加稳定,鲁棒性更好三 关键词:图像去噪;轮廓波;图像噪声标准差估计;图像结构特征度;直方图法 中图分类号:TP18;TN911.73一文献标志码:A一文章编号:1673?4785(2015)02?0255?06 中文引用格式:王科俊,杨晓飞.采用改进结构特征度度量分析的噪声标准差估计算法[J].智能系统学报,2015,10(2):255?260.英文引用格式:WANGKejun,YANGXiaofei.Thecontourletdenoisingalgorithmbasedonmodifiednoisevarianceestimation[J].CAAITransactionsonIntelligentSystems,2015,10(2):255?260. Thecontourletdenoisingalgorithm basedonmodifiednoisevarianceestimation WANGKejun,YANGXiaofei (CollegeofAutomation,HarbinEngineeringUniversity,Harbin150001,China) Abstract:Inthispaper,analgorithmbasedonthemodifiednoisestandarddeviationestimationwasproposed.Theproposedalgorithmprovidesanewapproachforthefoundationofcommoncontourletdenoisingmethods.Thecombi?nationofmodifiedimagestructuralcharacteristicmeasurementanalysismethodandfiltermethodisusedinselectingtheimagesub?block,whichissuitableforcomputingstandarddeviationofnoise.Finally,thehistogramsofthosesub?imagesareusedtoestimatestandarddeviationoftheimagenoise,whichissubsequentlyusedfordenoisingofcontourlet.Inthecontrastexperimentofstandarddeviationestimationthefiltermethods,partitionmethodsandim?provedpartitionmethodsarechosentocomparewiththestandarddeviationestimationalgorithm.Inthecontrastex?perimentofdenoising,theuniversalwaveletthresholddenoising,thecommoncontourletthresholddenoisingex?tendedfromwaveletthreshold,thecontourletdenoisingbasedonwienerfiltering,andthecontourletdenoisingbasedoncoefficientmodelsarechosentocomparewiththedenoisingalgorithmproposedinthispaper.Theexperi?mentalresultsshowedthatthemethodcanestimatestandarddeviationofimagesmoreaccuratelyandperformsmorereliablethanothercontourletdenoisingalgorithms. Keywords:imagedenoising;contourlet;standarddeviationestimationofimagenoise;imagestructuralcharacteris?ticmeasurement;histogrammethods 收稿日期:2014?11?13.一网络出版日期:2015?03?02.基金项目:国家自然科学基金资助项目(61100007).通信作者:杨晓飞.E?mail:licerain@hotmail.com.一一在使用图像采集设备对图像进行采集二传输二存储和转换的过程中,因受到各种环境因素的影响会
毕业论文--自适应噪声对消在语音信号处理中的应用研究
本科生毕业论文 (设计) 中文题目自适应噪声对消在语音信号处理中的应用研究 英文题目
摘要 在实际生活中,任何语音信号都不可避免的受到噪声信号的影响,如何有效的抑制和去除噪声,提高语音的可懂度是近年来的热门研究课题,文中介绍了自适应滤波器的基本原理,结构和应用,应用matlab软件,对自适应算法在噪声对消中的应用进行了仿真研究,并完成了语音信号噪声消除实例。 本文对自适应滤波算法在语音信号去噪方面进行了研究,对自适应对消系统进行了深入的学习与研究,在固定步长的基础上,建立了步长因子u与信噪比及噪声幅度之间的一种非线性函数关系,使步长随误差信号e(n)的变化而变化,从而提高了收敛速度,能够有效的滤除实际生活中语音信号中的高斯白噪声,工频干扰,以及其他讲话者的干扰,大幅度提高输出语音信号的信噪比,有效的提高语音的可懂度。通过实验证明,该算法在收敛速度,消噪性能,信噪比提高方面与常规的自适应算法相比均有一定的提高。 关键词:自适应滤波变步长LMS算法语音降噪
Adaptive noise cancellation in speech signal processing research Abstract: In our daily life ,all speech signal will be influenced by noise, How to effectively eliminate the noise is one of hot subjects for years.The paper begins with the principle of adaptive filter,structure and application. Based on the MATLAB platform, simulation is carried out for the applications of adaptive algorithms in noise cancelling,and completed the instance of voice signal noise reduction. This paper discuss about adaptive filtering algorithm in the speech signal denoising aspects of the research on the adaptive cancellation system in-depth study and research and establishes another step factor u and the error signal e (n) between the non-linear function of a new relationship, the algorithm using variable step size, the step with the magnitude of the noise signal to noise ratio and the change, to improve the convergence rate, can effectively filter out in real life speech signal Gaussian white noise, frequency interference, and interference with other speakers. Can greatly enhance the output speech signal to noise ratio, experiments show that the algorithm convergence rate, noise reduction performance, improving signal to noise ratio with the conventional adaptive algorithms have improved to some extent compared. In this paper, the coefficient of the formula
图像去噪方法
图像去噪是数字图像处理中的重要环节和步骤。去噪效果的好坏直接影响到后续的图像处理工作如图像分割、边缘检测等。图像信号在产生、传输过程中都可能会受到噪声的污染,一般数字图像系统中的常见噪声主要有:高斯噪声(主要由阻性元器件内部产生)、椒盐噪声(主要是图像切割引起的黑图像上的白点噪声或光电转换过程中产生的泊松噪声)等; 目前比较经典的图像去噪算法主要有以下三种: 均值滤波算法:也称线性滤波,主要思想为邻域平均法,即用几个像素灰度的平均值来代替每个像素的灰度。有效抑制加性噪声(一般指热噪声、散弹噪声等,它们与信号的关系是相加,不管有没有信号,噪声都存在),但容易引起图像模糊,可以对其进行改进,主要避开对景物边缘的平滑处理。 中值滤波:基于排序统计理论的一种能有效抑制噪声的非线性平滑滤波信号处理技术。中值滤波的特点即是首先确定一个以某个像素为中心点的邻域,一般为方形邻域,也可以为圆形、十字形等等,然后将邻域中各像素的灰度值排序,取其中间值作为中心像素灰度的新值,这里领域被称为窗口,当窗口移动时,利用中值滤波可以对图像进行平滑处理。其算法简单,时间复杂度低,但其对点、线和尖顶多的图像不宜采用中值滤波。很容易自适应化。 Wiener维纳滤波:使原始图像和其恢复图像之间的均方误差(在相同测量条件下进行的测量称为等精度测量,例如在同样的条件下,用同一个游标卡尺测量铜棒的直径若干次,这就是等精度测量。对于等精度测量来说,还有一种更好的表示误差的方法,就是标准误差。标准误差定义为各测量值误差的平方和的平均值的平方根,故又称为均方误差。)最小的复原方法,是一种自适应滤波器,根据局部方差来调整滤波器效果。对于去除高斯噪声效果明显。
介绍了噪声抵消的原理和从强噪声背景中自适应滤波提取有用信号的
LMS与RLS自适应滤波算法性能比较 马文民 【摘要】:介绍了自适应滤波器去除噪声的原理和从强噪声背景中采用自适应滤波提取有用信号的方法,并对最小均方(LMS, Least Mean Squares)和递推最小二乘(RLS, Recursive Least Squares)两种基本自适应算法进行了算法原理、算法性能分析。计算机模拟仿真结果表明,这两种算法都能通过有效抑制各种干扰来提高强噪声背景中的信号。检测特性相比之下,RLS 算法具有良好的收敛性能,除收敛速度快于LMS算法和NLMS算法以及稳定性强外,而且具有更高的起始收敛速率、更小的权噪声和更大的抑噪能力。 【关键词】:自适应滤波;原理;算法;仿真 引言: 自适应滤波是近30年以来发展起来的一种最佳滤波方法。它是在维纳滤波,kalman滤波等线性滤波基础上发展起来的一种最佳滤波方法。由于它具有更强的适应性和更优的滤波性能。从而在工程实际中,尤其在信息处理技术中得到广泛的应用。自适应滤波的研究对象是具有不确定的系统或信息过程。"不确定"是指所研究的处理信息过程及其环境的数学模型不是完全确定的。其中包含一些未知因数和随机因数。任何一个实际的信息过程都具有不同程度的不确定性,这些不确定性有时表现在过程内部,有时表现在过程外部。从过程内部来讲,描述研究对象即信息动态过程的数学模型的结构和参数是我们事先不知道的。作为外部环境对信息过程的影响,可以等效地用扰动来表示,这些扰动通常是不可测的,它们可能是确定的,也可能是随机的。此外一些测量噪音也是以不同的途径影响信息过程。这些扰动和噪声的统计特性常常是未知的。面对这些客观存在的各种不确定性,如何综合处理信息过程,并使某一些指定的性能指标达到最优或近似最优,这就是自适应滤波所要解决的问题。 在这几十年里,数字信号处理技术取得了飞速发展,特别是自适应信号处理技术以其计算简单、收敛速度快等许多优点而广泛被使用。它通过使内部参数的最优化来自动改变其特性。自适应滤波算法在统计信号处理的许多应用中都是非常重要的。 在工程实际中,经常会遇到强噪声背景中的微弱信号检测问题。例如在超声波无损检测领域,因传输介质的不均匀等因素导致有用信号与高噪声信号迭加在一起。被埋藏在强背景噪声中的有用信号通常微弱而不稳定,而背景噪声往往又是非平稳的和随时间变化的,此时很难用传统方法来解决噪声背景中的信号提取问题。自适应噪声抵消技术是一种有效降噪的方法,当系统能提供良好的参考信号时,可获得很好的提取效果。与传统的平均迭加方法相比采用自适应平均处理方法还能降低样本数量。 1自适应滤波器的基本原理 所谓的自适应滤波,就是利用前一时刻以获得的滤波器参数的结果,自动的调节现时刻的滤波器参数,以适应信号和噪声未知的或随时间变化的统计特性,从而实现最优滤波。自适应滤波器实质上就是一种能调节其自身传输特性以达到最优的维纳滤波器。自适应滤波器不需要关于输入信号的先验知识,计算量小,特别适用于实时处理。 由于无法预先知道信号和噪声的特性或者它们是随时间变化的,仅仅用FIR和IIR两种具有固定滤波系数的滤波器无法实现最优滤波。在这种情况下,必须设计自适应滤波器,以跟踪信号和噪声的变化。 自适应滤波器的特性变化是由自适应算法通过调整滤波器系数来实现的。一般而言,自适应滤波器由两部分组成,一是滤波器结构,二是调整滤波器系数的自适应算法。 自适应噪声抵消系统的核心是自适应滤波器,自适应算法对其参数进行控制,以实现最佳滤波。不同的自适应滤波器算法,具有不同的收敛速度、稳态失调和算法复杂度。根据自
噪声测定实验教案
噪声测定实验 一实验目的 1掌握AWA5610C声级计的工作原理及其使用方法 2掌握AWA6270A噪声频谱分析仪的工作原理及其使用方法 二实验内容 1使用AWA5610C声级计测量噪音 2使用AWA6270A噪声频谱分析仪测量噪音 三实验原理 1 AWA5610C声级计的工作原理 工作原理是被测的声压信号通过传声器转换成电压信号,然后经衰减器、放大器以及相应的计权网络、滤波器,或者输入记录仪器,或者经过均方根值检波器直接推动以分贝标定 的指示表头。 2 AWA6270A噪声频谱分析仪的工作原理 工作原理是输入信号经衰减器直接外加到混波器,可调变的本地振荡器经与CRT同步的扫瞄产生器产生随时间作线性变化的振荡频率,经混波器与输入信号混波降频后的中频信号(IF)再放大,滤波与检波传送到CRT的垂直方向板。 四实验设备仪器 (一)AWA5610C声级计 AWA5610C型积分声级计是一种袖珍式智能化噪声测量仪 器,可广泛应用于环境噪声的测量与自动监测,也可用于劳动保 护、工业卫生及各种机器、车辆、船舶、电器等工业噪声测量。 本仪器采用了先进的数字检波技术,具有可靠性高、稳定性好、 动态范围宽等优点。 主要技术性能: 驻极体测试电容传声器,灵敏度: 1.传声器:Φ1 2.7mm(1/2”) 约40mV/Pa,频率范围:20Hz~12.5kHz。 2.测量范围:35~130dBA(以2×10-5Pa为参考,下同) 3.频率范围:20Hz~12.5kHz 4.频率计权:A计权 5.时间计权:快(F),慢(S) 图1 AWA5610C声级计 6.检波器特性:真有效值、峰值因数 3 7.准确度:2型 8.测量时间:手控、10s、1min、5min、10min、20min、1h、4h、8h、24h。 9.显示:4位LCD,直接显示测量结果Lp、Leq、Lmax、Lmin、Linst、Tm及日历年、月、日、时、分、秒等。 10.储存:60组数据,包括年、月、日、时、分、设定时间、测量经历时间、最大声级, 最小声级、等效声级。 11.输出接口:RS—232C,可接至微型打印机或计算机。
噪声测量三种方法
噪声系数测量的三种方法 本文介绍了测量噪声系数的三种方法:增益法、Y系数法和噪声系数测试仪法。这三种方法的比较以表格的形式给出。 前言 在无线通信系统中,噪声系数(NF)或者相对应的噪声因数(F)定义了噪声性能和对接收机灵敏度的贡献。本篇应用笔记详细阐述这个重要的参数及其不同的测量方法。 噪声指数和噪声系数 噪声系数有时也指噪声因数(F)。两者简单的关系为: NF = 10 * log10 (F) 定义 噪声系数(噪声因数)包含了射频系统噪声性能的重要信息,标准的定义为: 从这个定义可以推导出很多常用的噪声系数(噪声因数)公式。 下表为典型的射频系统噪声系数: *HG=高增益模式,LG=低增益模式
噪声系数的测量方法随应用的不同而不同。从上表可看出,一些应用具有高增益和低噪声系数(低噪声放大器(LNA)在高增益模式下),一些则具有低增益和高噪声系数(混频器和LNA在低增益模式下),一些则具有非常高的增益和宽范围的噪声系数(接收机系统)。因此测量方法必须仔细选择。本文中将讨论噪声系数测试仪法和其他两个方法:增益法和Y系数法。 使用噪声系数测试仪 噪声系数测试/分析仪在图1种给出。 图1. 噪声系数测试仪,如Agilent公司的N8973A噪声系数分析仪,产生28VDC脉冲信号驱动噪声源 (HP346A/B),该噪声源产生噪声驱动待测器件(DUT)。使用噪声系数分析仪测量待测器件的输出。由于分析仪已知噪声源的输入噪声和信噪比,DUT的噪声系数可以在内部计算和在屏幕上显示。对于某些应用(混频器和接收机),可能需要本振(LO)信号,如图1所示。当然,测量之前必须在噪声系数测试仪中设置某些参数,如频率范围、应用(放大器/混频器)等。 使用噪声系数测试仪是测量噪声系数的最直接方法。在大多数情况下也是最准确地。工程师可在特定的频率范围内测量噪声系数,分析仪能够同时显示增益和噪声系数帮助测量。分析仪具有频率限制。例如,Agilent N8973A可工作频率为10MHz至3GHz。当测量很高的噪声系数时,例如噪声系数超过10dB,测量结果非常不准确。这种方法需要非常昂贵的设备。 增益法 前面提到,除了直接使用噪声系数测试仪外还可以采用其他方法测量噪声系数。这些方法需要更多测量和计算,但是在某种条件下,这些方法更加方便和准确。其中一个常用的方法叫做“增益法”,它是基于前面给出的噪声因数的定义:
DSP实现噪声消除
Adaptive noise cancellation is used to remove background noise from useful signals.This is an extremely useful technique where a signal is submerged in a very noisy environment.DSP is a kind of high speed and performance professional digital signal https://www.360docs.net/doc/8d16669629.html,ing DSP in ad aptive noise cancellation system,real-time control and high precision ca n be achieved.In this paper,an adaptive noise cancellation system base d on DSP is designed,and noise in the signals is decreased efficiently. Keyword:adaptive;noise cancellation;DSP;LMS;RLS 摘要:自适应噪声消除技术在信号处于噪声很强的环境中时,可以非常有效地将噪声去除掉。而DSP是一种高速、高性能的专业数字信号处理器,用DSP实现自适应噪声消除,其具有很好的实时性和处理精度。在此完成了基于DSP的自适应噪声消除系统,有效地消除了信号中的噪声。 关键词:自适应;噪声消除;DSP;LMS;RLS DSP(Digital Signal Processor,数字信号处理器)是在模拟信号变换成数字信号以后进行高速实时处理的专用处理器件,DSP具有接口简单、方便;精度高、运算速度快、稳定性好;编程方便,容易实现复杂的算法;集成方便等优点,已经被广泛的应用于通信、雷达、语音、图像、消费类电子产品等领域。DSP技术的发展和应用,使得自适应信号处理技术得以实现。自适应噪声消除是消除强背景噪声的一种有效的技术,在通常情况下,背景噪声不是稳定不变的,而是随着时间的变化而变化。因此,噪声消除应该是一个自适应噪声处理过程:既可以在时变的噪声环境下工作,还可以根据环境的改变而调整自身的工作参数。在本文中,利用DSP的优越性能,在TI公司TMS320VC5416芯片
图像去噪方法
图像去噪方法 图像去噪是数字图像处理中的重要环节和步骤。去噪效果的好坏直接影响到后续的图像处理工作如图像分割、边缘检测等。图像信号在产生、传输过程中都可能会受到噪声的污染,一般数字图像系统中的常见噪声主要有:高斯噪声(主要由阻性元器件内部产生)、椒盐噪声(主要是图像切割引起的黑图像上的白点噪声或光电转换过程中产生的泊松噪声)等; 目前比较经典的图像去噪算法主要有以下三种: 均值滤波算法:也称线性滤波,主要思想为邻域平均法,即用几个像素灰度的平均值来代替每个像素的灰度。有效抑制加性噪声(一般指热噪声、散弹噪声等,它们与信号的关系是相加,不管有没有信号,噪声都存在),但容易引起图像模糊,可以对其进行改进,主要避开对景物边缘的平滑处理。中值滤波:基于排序统计理论的一种能有效抑制噪声的非线性平滑滤波信号处理技术。中值滤波的特点即是首先确定一个以某个像素为中心点的邻域,一般为方形邻域,也可以为圆形、十字形等等,然后将邻域中各像素的灰度值排序,取其中间值作为中心像素灰度的新值,这里领域被称为窗口,当窗口移动时,利用中值滤波可以对图像进行平滑处理。其算法简单,时间复杂度低,但其对点、线和尖顶多的图像不宜采用中值滤波。很容易自适应化。 Wiener维纳滤波:使原始图像和其恢复图像之间的均方误差(在相同测量条件下进行的测量称为等精度测量,例如在同样的条件下,用同一个游标卡尺测量铜棒的直径若干次,这就是等精度测量。对于等精度测量来说,还有一种更好的表示误差的方法,就是标准误差。标准误差定义为各测量值误差的平方和的平均值的平方根,故又称为均方误差。)最小的复原方法,是一种自适应滤波器,根据局部方差来调整滤波器效果。对于去除高斯噪声效果明显。
LMS算法在噪声抵消中的应用
LMS算法在噪声抵消中的应用 冯振勇,王玉良 北京邮电大学信息工程学院,北京(100876) E-mail:fengzhenyong1984@https://www.360docs.net/doc/8d16669629.html, 摘要:自适应噪声干扰抵消器是基于自适应滤波器原理的一种扩展。本文首先根据自适应LMS滤波器的设计理念介绍了噪声抵消器的原理,得出自适应抵消器只有参考输入噪声与原始输入噪声存在相关性,才能有效的抵消噪声的结论;在此基础上进行了稳定噪声抵消的求解,以单输入单输出维纳滤波器系统为例,通过滤波器的误差公式和转移函数求得维纳滤波器问题的无约束非因果解;随后利用LMS算法设计了自适应单信道噪声抵消器,根据前两步的分析,将自适应抵消器的参考输入信号谱函数分解,求得维纳解的最佳转移函数;最后通过MATLAB仿真实验证明了LMS算法在自适应滤波去噪中的优势,并对结果进行了分析。 关键词:LMS算法;自适应单信道噪声抵消器;自适应滤波 中图分类号:TN713 1. 引言 自适应噪声抵消器是利用自适应噪声抵消技术,从背景噪声中提取语音信号,以提高语音的清晰度。其目的是把信号中的噪声和语音信号进行有效地分离,降低环境噪声的影响。 自适应干扰对消是通过自适应过程加以控制的,它可以在信号很微弱或信号用常规的方法无法检测的噪声干扰场中,将从一个或多个传感器所取得的参考输入加以过滤,并从包含信号和噪声的原始输入中减去,最后结果是原始信号中的噪声或干扰被衰减或消除,而保留了有用信号[1]。噪声干扰对消可完成时间域(频域)的滤波,也可实现空间域的滤波,因此自适应干扰对消具有广泛的应用范围。例如消除心电图中的电源干扰、检测胎儿心音时滤除母亲的心音及背景干扰、在有多人讲话的场合下提取某人的讲话、作为天线阵列的自适应旁瓣对消器。 2. 自适应噪声抵消器的设计 理论上讲,自适应噪声干扰抵消器是基于自适应滤波器原理的一种扩展。简单的说,把 d n改为信号加噪声干扰的原始输入端,而它的输入端改自适应滤波器的期望信号输入端() 为噪声干扰端,有横向滤波器的参数调节输出以将原始输入端的噪声抵消掉,这时误差输出就是有用信号了。下面从噪声抵消器的原理介绍,求解过程和设计三方面进行说明。 2.1 噪声抵消器的原理 图1 噪声低消器的原理图
基于回归分析和主成分分析的噪声方差估计方法
第40卷第5期电子与信息学报 V01.40No.5 2018年5月JournalofElectronics&Information TechnologyMay2018-——●_———_--—--—l---_-__-_l口I●口IlEI_=lt———;————I——一 基于回归分析和主成分分析的噪声方差估计方法 吴疆Ⅲ尤飞Ⅲ蒋平+㈣ …(榆林学院信息工程学院榆林719000) …(西安电子科技大学计算机学院西安710071) 摘要:准确可靠的噪声强度估计是数字图像处理领域中一个重要的研究课题。噪声估计的难点在于如何提取用于估计的纯噪声信息,近几年,许多算法采用主成分分析技术来避免图像纹理信息的干扰,用最小特征值来估计噪声方差,可以有效地减少图像纹理信息对估计结果的影响,所以这类方法对于高频图像(丰富纹理图像1效果很好。由于图像块数量有限,最小特征值实际上比真实噪声方差小,而且图像块数量越少,偏差越大。如果直接把最小特征值作为估计方差,则容易低估计高噪声。该文通过回归分析确定最小特征值跟真实噪声方差的比值和图像块数量呈幂函数关系,因此可以通过最小特征值和幂函数关系得到真实的噪声方差。实验表明该文方法既能处理高频图像,又适合各种噪声水平,同时也能处理乘性高斯噪声。 关键词:噪声图像:高斯噪声;噪声估计;主成分分析;回归分析 中图分类号:TN911.7文献标识码:A文章编号:1009—5896(2018)05—1195-07DOI:10.11999/JEITl70624 NoiseVarianceEstimationMethodBasedonRegressionAnalysis andPrincipalComponentAnalysis WUJiang①YOUFei①JIANGPing①② …(CollegeofInformationEngineering,YulinUniversity,Yulin719000,China) …(SchoolofComputerScienceandTechnofogy,XidianUniversity,Xi’an710071,China)Abstract:Accurateandreliableblindnoiseestimationisanimportantresearchtopicofdigitalimageprocessing.Themainchallengeishowtoextractpurenoiseinformationforestimating.Inrecentyears,manyalgorithmsuseprincipalcomponentanalysistechnologytoexcludetheinterferenceofimagetexturesinformation,andestimatenoiselevelbyusingtheminimaleigenvalue.Sothat,theimagetextureshavesmallesteffectontheminimaleigenvalue,thusthiskindofmethodsperformswellforhighfrequencyimage(imagewithabundanttextures).Theminimaleigenvalueisactuallysmallerthanthetruenoisevariancebecauseoflimitedimageblocks,andthebiasisthebiggerifthenumberofimagepatchesisthesmaller.IfthenoiselevelisestimatedaSthesmallesteigenvalue,thefinalresultwillbeunderestimated.Itisfoundthattherelationbetweentheratioofestimatedresulttorealnoisevarianceandthenumberofimageblocksispowerfunctionbyusingregressionanalysis,thusthetruenoiselevelcanbecomputedbyusingtheminimaleigenvalueandthepowerfunction.Theexperimentresultsshowthattheproposedalgorithmworkswelloveralargerangeofvisualcontentandnoiseconditions,andcanprocessmultiplyGaussiannoisetoo. Keywords:Noiseimage;Gaussiannoise;Noiseestimation;Principalcomponentanalysis;Regressionanalysis 1引言 数字图像在采样、处理、存储、传输过程中容 收稿日期:2017-06-28;改回日期:2017-11—24:网络出版:2018—01—23+通信作者:蒋平jiangping@yulinu.edu.cn 基金项目:国家自然科学基金(11641002),榆林市科技计划项目(Gyl3-12),陕西省教育厅科研项目(11JK0636) FoundationItems:TheNationalNatnralScienceFoundationofChina(11641002),TheScienceandTechnologyProgramofYulin(Gyl3—12),TheProgramofEducationCommissionofShaanxiProvince(1lJK0636)易受到噪声的污染。许多噪声图像相关的图像处理方法,如:去噪叭压缩、分割、图像质量评价【2]等,都把噪声方差作为已知参数,但是在实际应用中,噪声方差未知。因此,精准可靠的噪声方差估计是一个重要的研究课题。 从单幅图像中估计噪声的重点在于如何分离出纯噪声信息。根据提取噪声信息的方式,噪声估计方法大体可以分为3类:变换域方法、滤波方法和分块方法。 变换域方法把输入图像变换到某个域,然后在 万方数据
自适应噪声抵消器的MATLAB设计与实现概要
福建电脑 2010年第 9期 自适应噪声抵消器的 MATLAB 设计与实现 成利香 1,2, 张桂新 1 (1. 中南大学信息科学与工程学院湖南长沙 4100002. 湖南工学院湖南衡阳421002 【摘要】:本文简述了自适应滤波的基本原理 , 并给出了自适应滤波噪声抵消的一般系统模型 , 重点研究了 LMS 自适应算法。完成了在 MATALB 下的仿真 , 并通过设置不同参数 , 对其性能做了分析。【关键词】:自适应滤波 ; 噪声抵消 ; LMS 算法 ; MATLAB 0、引言 自适应滤波自适应滤波器不需要输入信号的先验知识 , 它是利用前一时刻已经获得的输入信号获参量 , 调节现时刻的滤波参数 , 以适应信号和噪声未知的或随时间变化的统计特性 , 从而实现最优维纳滤波。自适应滤波自 Widrow 等提出以来 , 因其计算量小 , 易于实现等特点 , 得到了各领域的广泛应用。 1、自适应滤波器噪声抵消的原理 1. 1自适应滤波器噪声抵消的基本原理 一个自适应滤波器包括两个不同的部分 :一个是具有可调系数的数字滤波器 , 一个是用于调整或改变滤波系数的自适应算法。图 1给出了自适应滤波器作为噪声对消的原理框图。 图 1自适应滤波器作为噪声对消的原理框图 噪声消除的主要目的是对被污染信号中的噪声的最优估计 , 以获得信号的最优估计。其中 x(n表示输入信号 ; y(n表示被污染的信号 , 包括所希望的信号和噪声
信号 ; r(n表示被污染信号的某种测量 , 与叠加的噪声信号相关 ; d (n:表示叠加噪声信号的估计值 ; e(n; 表示作为输出的信号 , 一是作为希望信号 x(n的估计输出值 , 二是用于调整自适应滤波器的参数。利用此输出值通过某种自适应算法对滤波器参数进行调整 , 最终获得噪声最优估计值 , 当输入信号的统计特性发生变化 , 自适应数字滤波器能够跟踪这种变化 , 自动调整参数 , 使滤波器性能重新达到最佳。 1.2自适应算法的研究 根据自适应算法优化准则的不同 , 其算法大致分为两大类 , 一是最小均方算法 (LMS , least -mean -square , 二是递归最小二乘法 (RLS 。 LMS 算法是基于最小均方误差准则的维纳滤波器和最陡下降法提出的 , 是对梯度下降算法的近似简化。算法的基本思想是 :调整滤波器自身的参数 , 使滤波器的输出信号与期望输 出信号之间的均方误差最小 , 系统输出为有用信号的最佳估计。其算法推导如下 : 其中μ为固定步长因子 , 是一常数。 显然上面的算法不需要事先知道信号的统计量 (即相关量 R 和 P , 而使用他们的瞬时估计代替算法获得的权重只是一个估计值 , 但随着调节权重 , 这些估计值逐渐提高 , 滤波器也越来越适应信号特性 , 最终权值收敛 , 收敛的条件为 其中λmax 是输入数据方差矩阵的最大特征值。下面给出基本 LMS 算法实 现的步骤 : 1 初始化 , 令所有权重为任一固定值 , 或为 0; 2 计算滤波输出 3 计算估计误差 4 更新下一时刻的滤波器的权重 3、自适应噪声抵消器的 MATLAB 的设计与实现 max
含噪信号的频率估计算法研究
含噪信号的频率估计算法研究 对被噪声污染的正弦信号进行参数估计是一个十分重要的课题,广泛应用于雷达、声呐、通信、语音分析等领域中。频率作为正弦信号最重要的参数和最本质的特征,频率的估计一直是信号处理领域的一个经典课题。 频率估计方法可分为时域方法和频域方法,时域方法一般基于自相关或线性性质,频域方法则基于离散傅里叶变换。不同算法的性能差别主要体现在均方误差和偏差上。 此外,因实际情况的不同,算法的计算量、信噪比范围、采样长度也是常用指标。估计算法的性能理论界为克拉美罗下界(Cramer Rao Low Bound,CRLB),寻找能够逼近CRLB且计算量小的频率估计算法正是研究的难点。 因正弦信号的自相关函数能够抑制噪声干扰,并且保留原信号的频率信息。对实正弦信号,本文设计了两种基于信号自相关的实信号频率估计算法并进行理论分析。 仿真结果表明估计算法在短数据序列和中低信噪比(SNR)时能够达到CRLB 界。对复正弦信号,基于两步法的思想设计算法,即首先通过粗估计找出最大DFT 谱线,再设计算法进行细估计来精确估计频率。 本文利用傅里叶系数比值建立关于频率差的方程,将多种估计式统一到一个框架下,并得到复正弦频率估计器设计的一般准则。本文主要的研究内容如下:针对短序列实正弦信号估计精度较差的问题,提出基于方程求根的高阶自相关频率估计算法。 利用高阶自相关抑噪效果较好的特点,由自相关函数建立方程。求解方程得到频率估计值,并与对比算法比较计算复杂度。
接着利用泰勒展开式,推导算法的方差的理论表达式及其近似。理论表达式能够很好地符合仿真结果,但结构繁琐。 其近似式结构简单,并在数据序列较长情况下能够满足精度要求。该算法综合平衡了计算精度和计算量,仿真结果表明估计算法的精度优于对比算法,在短数据序列和中等信噪比(SNR)时能够达到CRLB界。 高阶自相关函数的抑噪效果更好,但是也存在高阶自相关系数利用不充分以及频率模糊的问题。本文提出基于高阶自相关及自相关递推结构的估计算法。 算法利用多个高阶自相关函数,结合切比雪夫多项式递推结构,构造出具有非零解的齐次线性方程组。通过方程变换,将实信号频率估计问题转化为一元多项式求根问题。 经过进一步推导,最终将其等价为一元n次非负多项式最小值问题。本文估计算法避免了高阶自相关算法常见的频率模糊问题,理论推导中同时给出算法等价形式。 仿真结果表明算法在估计精度上体现出优势,即使在数据序列较小和低信噪比(SNR)时也能够逼近CRLB界。最后,将该算法应用到声学释放器的实践仿真中与对比算法进行比较,并测试出频率估计所需最优数据长度。 基于二步法思想,构造出复信号频率细估计的算法的一般框架,并进行估计算法设计和分析。首先介绍了两步法的估计原理,解释了DFT最大谱线和真实谱峰之间的区别。 接着推导以DFT最大谱线为中心的傅里叶变换系数表达式,利用傅里叶系数的比值得到真实频率与DFT最大谱线之间差值?(即细估计)的方程表达结构。分别利用正弦的等价近似表达、三角变换等不同方法求解得到不同的解的表达,进
专利-一种自适应声反馈消除方法
一种自适应声反馈消除方法 CN 103475980 A 摘要 本发明公开了一种自适应声反馈消除方法,旨在提供一种具有较高增益和良好鲁棒性的声反馈消除方法,其具体步骤为:一、主麦克风拾取音频信号d(n),d(n)包含远端语音信号和近端声反馈信号成份,参考麦克风拾取声反馈信号x(n);二、对d(n)和x(n)采用自适应消除算法,输出为 e(n);三、对e(n)进行数模转换和功率放大;四、通过扬声器输出音频信号。此方案可以准确消除环境噪音、防止产生嚣叫,增益高,处理速度快,适用于教室、会场等扩声环境。 权利要求(6) 1.一种自适应声反馈消除方法,其特征在于,包括以下步骤: 一、主麦克风拾取音频信号d(n),d(n)包含远端语音信号和近端声反馈信号成份,参考麦克风拾取声反馈信号X (n); 二、对d(n)和x(n)采用自适应消除算法,输出为e(n),具体为: h(n) = {h[0],h[l]....,h[N-l]} ,当h(n)的频率特性逼近外H(z)=F''(z)/F'(z)时,即可消除声反馈信号;采用PNLMS算法估计实际的参考检测声反馈路径H(z),递推算法如 下: 上述公式中,μ为步长因子,α为正整数,ρ是影响整体收敛速度的参数;h(n)指回声路径估计FIR滤波器的单位脉冲响应;Ν指回声路径FIR滤波器的阶次;Τ为转置符号;f(n)指回声估计输出;hg(n)指回声路径估计FIR滤波器的第k个估计系数;三、对e(n)进行数模转换和功率放大;四、通过扬声器输出音频信号。 2.根据权利要求1所述的一种自适应声反馈消除方法,其特征在于,步骤二的e(n)经过延时模块后再输出到数模转换。 3.根据权利要求1或2所述的一种自适应声反馈消除方法,其特征在于,参考麦克风和主麦克风拾取到声反馈音频信号的强度之差需控制在3db之内;参考麦克风和主麦克风拾取到语音音频信号的强度之差需大于20db以上。 4.根据权利要求1或2所述的一种自适应声反馈消除方法,其特征在于,处理窗滑动间隔等于6个采样点,每6个采样点完成一次自适应算法运算。 5.根据权利要求4所述的一种自适应声反馈消除方法,其特征在于,AD转换器的采样频率为 48khz,分辨率不小于20bit。 6.根据权利要求5所述的一种自适应声反馈消除方法,其特征在于,FIR滤波器阶次不小于128。说明 一种自适应声反馈消除方法 技术领域