512控制器资料
产品概述:
AT3010D控制器是一款带LCD显示,无线遥控,音频输入,地址编辑的DMX控制器。主要特点:
输入电压:AC110V或AC220V。
输出DMX信号符合DMX512/1990标准。
具有一个标准的DMX512输出通道,可以实现最多170个全彩点的控制。
内部具有常亮七彩,一致跳变,一致渐变,流水,追逐,中分,堆积等灯光模式。
各种变化效果可分别设定16种不同的变化速度和颜色选择设定。
具有简易的编程功能,可以方便的定义输出灯光效果。
编程可自由定义内部的各种变化模式为一个步骤。
最多可定义8个独立的循环的步骤。
具有四个操作按键,可以方便进行功能操作。
具有LCD输出指示,所有功能在LCD上均有操作提示。
有无线遥控器可以远距离调试和更改操作。
有音频输入接口,内置有两种音频模式。
具有DMX地址编辑功能,方便地址的修改。
应用范围:
小型变化效果的灯光系统的DMX接口输出控制。
产品标准规格表:
典型性能参数:
最大无损范围:
机械尺寸:
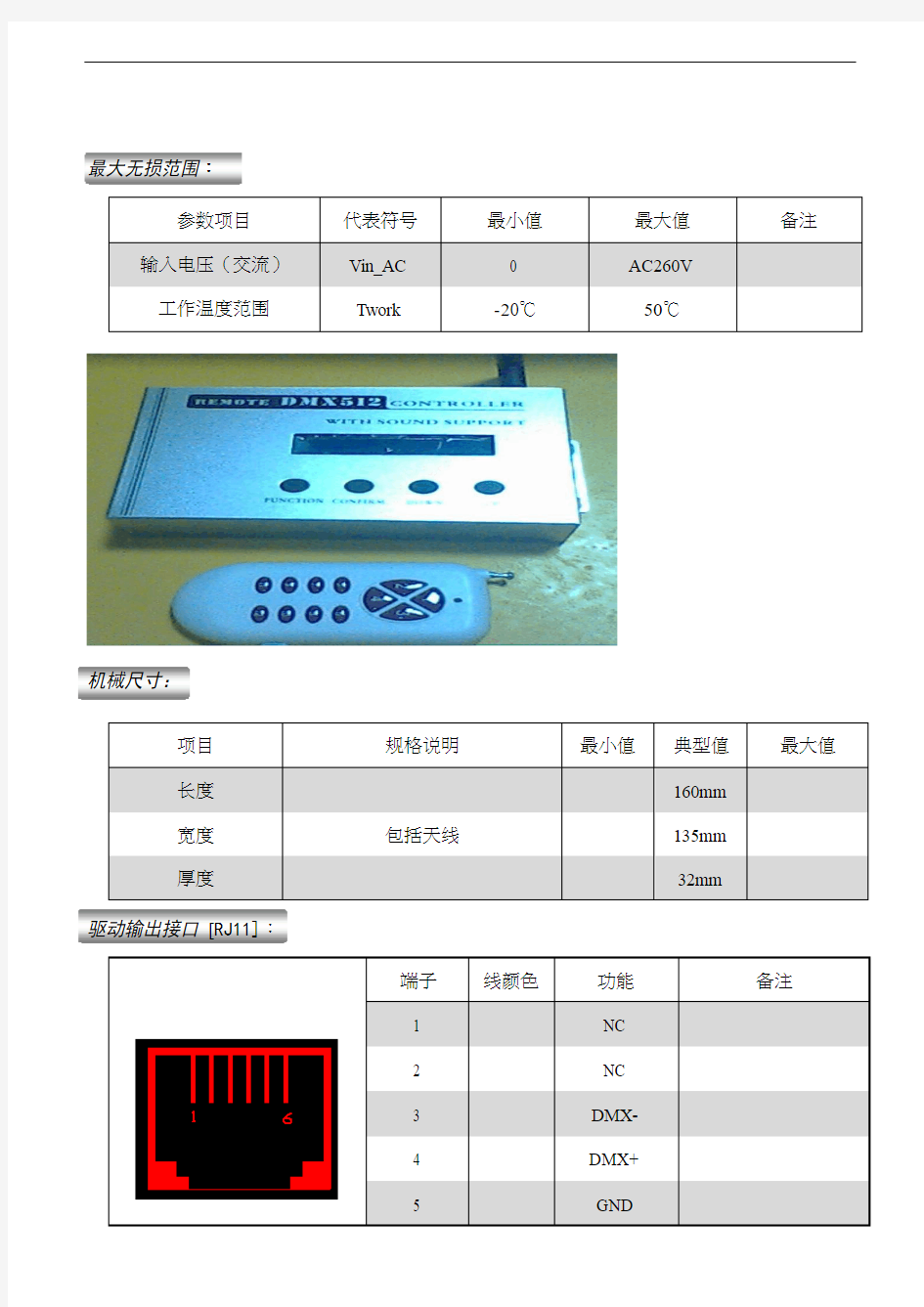
驱动输出接口[RJ11]:
遥控器功能说明(键5-12的控制功能可以通过控制器改变):
包装方式:
暂缺
备注:
规格书仅用于选型和应用的参考,并不保证与产品完全一致,确认时请以样品为准。
对于参数要求与规格书中不同的要求,请在合同中特别标明。
本公司有对本规格书进行修正的权利,请在使用前进行最新资料的确认。
双电源自动切换控制器说明书(CN B44 2011[1].06.13)
NA1系列双电源自动切换控制器
概述 产品型号及含义 正常工作条件和安装条件性能特点 断路器型号、规格Page 01 Page 02 Page 02 主要技术参数 故障切换过程外形及安装尺寸工作原理 安装与调试 二次接线图 订货须知Page 02 Page 02 Page 04 Page 12 Page 12 Page 15 Page 19 Page 01 Page 01 目录
1 概述 NA1系列自动电源转换开关(简称NA1)主要由两台NA1系列万能式断路器、机械连锁及双电源转换控制器等组成,适用于频率50Hz,额定工作电压400V的两路三相四线制电网中。如高层建筑、医院、商场、银行、消防、化工、冶金等不允许断电的一类负荷,部分二类负荷完成双回路供电系统的电源 自动转换,从而保证重要用户供电的可靠性。 本系列产品符合GB14048.2和GB/T 14048.11标准。 2 产品型号及含义 N A 1 - □ 双电源控制器功能代号: R-电网转电网,自投自复型 S-电网转电网,自投不自复型(试制中,暂不供货) F-电网转发电,自投自复型 企业设计序号 企业万能式断路器代号 企业特征代号 3 正常工作条件和安装条件 3.1 周围空气温度:上限值不超过+40℃;下限值不低于-5℃;24h内的平均值不超过+35° 环境温度低于-5℃时,订货时需要特殊注明。 环境温度超过+40℃时,需按照NA1万能式断路器使用说明书第3页2.3条款要求进行降容使用。 3.2 极限大气条件按照NA1万能式断路器使用说明书第1页1.3c条款要求。 3.3 安装地点:安装地点的海拔高度不超过2000m。 安装地点海拔高度超过2000m时,需按照NA1万能式断路器使用说明书第3页2.3条款要求进行降容使用。 3.4 污染等级为3级。 3.5 安装类别为IV类。 3.6 主回路的使用类别为AC-33B,电动机负载或混合负载。 3.7 安装条件:双电源系统的两台NA1万能式断路器在相邻的两个配电柜中进行水平安装,两台断路器 左侧板之间的最大距离不超过1.5m,两台断路器之间安装钢缆连锁进行连锁。双电源系统的两台 NA1万能式断路器在1个配电柜中进行上下安装,两台断路器底板之间的最大距离不超过1m,两台断路器之间安装钢缆连锁或杠杆连锁。 双电源控制器为面板安装,通过专用连接电缆与断路器连接,专用连接电缆为2m (线长超过2m时请在订货时特殊注明,但最长不得超过3m)。
焊接机器人毕业论文
第1章绪论 1.1课题研究的目的及意义 焊接是制造业中最重要的工艺技术之一。它在机械制造、核工业、航空航天、能源交通、石油化工及建筑和电子等行业中的应用越来越广泛。随着科学技术的发展,焊接已从简单的构件连接方法和毛坯制造手段,发展成为制造业中一项基础工艺,一种生产尺寸精确的产品的生产手段。传统的手工焊接已不能满足现代高技术产品制造的质量、数量要求。因此,保证焊接产品质量的稳定性、提高生产率和改善劳动条件已成为现代焊接制造工艺发展亟待解决的问题。电子技术、计算机技术、数控及机器人技术的发展为焊接过程自动化提供了十分有利的技术基础,并已渗透到焊接各领域中。近20年来,在半自动焊、专机设备以及自动焊接技术方面已取得了许多研究和应用成果,表明焊接过程自动化已成为焊接技术新的生长点之一。从21世纪先进制造技术的发展要求看,焊接自动化生产已是必然趋势。焊接机器人的诞生是焊接自动化革命性的进步,它突破了焊接刚性自动化的传统方式,开拓了一种柔性自动化的生产方式,从而使中小批量的产品自动化焊接成为可[1]。 焊接机器人已经广泛应用于汽车、工程机械、摩托车等行业,极大地提高了焊接生产的自动化水平,使焊接生产效率和生产质量产生了质的飞跃。同时改善了工人的劳动环境[2]。但是,现在焊接领域中自动化程度最高的手臂式机器人在使用时有两个局限性:一个是它的活动范围较小,因为它像一个手臂,手臂长1.5~2米,也就是其活动半径,所以焊接的工件不能太长,最大范围也不能超过2米。二是它必须用编程或示教进行工作,对不规则的焊缝,特别是在焊接过程中焊缝发生形变时,则很难适应。然而,许多大型工件体积非常庞大,而且必须在工地和现场进行焊接。例如:石化工业中的大型储油罐、球罐,造船业中的各种轮船,对这类产品的焊接,就很难实现自动化,许多建设工作仍然采用人工焊接[3]。因此,给焊接机器人加装各种传感器,使它们具有焊接路径自主获取、焊缝跟踪以及焊接参数在线调整等能力,具有很高的实用价值。机器人焊接过程的自主化和智能化已经成为科研工作者的一个研究重点。移动焊接机器人由于其良好的移动性、强的磁吸附力以及较高的智能,成为解决大型焊接结构件自动化焊接的有效方法[4]。尽管自主移动机器人的实用化研究还不够完善,但移动机器人是解决无轨道,无导向,无范围限制焊接的良好方案。 1.2国内外研究现状 自1962年美国推出世界上第一台Unimate型和Versatra型工业机器人以来,越来越多的工业机器人投入生产使用中。这其中大约有半数是焊接机器人。焊接机器人是在工业机器人上装备焊接系统,如送丝机、软管、焊枪、焊炬或焊钳,并配备相
[指导]电脑摇头灯DISCO_240控制台编程教程
[指导]电脑摇头灯DISCO_240控制台编程教程Disco 240 DISCO240 产品名称:迪士科240 电脑灯控制台产品型号:DISCO240 所属类别:电脑灯控制台 净重:4.3kg 毛重:5.0kg 产品尺寸:49x24.5x11cm 包装尺寸:53x32x15cm 详细规格: , 国际标准DMX512信号 , 总通道数240路,可控16通道12台灯 , 程序(场)数12场 , 程序总步数(场景)40步 , LCD液晶显示屏,16*2字符
, 48个调光通道(点控,分控,集控) 编程 (四个电脑摇头灯的情况下) 第一步 电机开关下的第二个红色按钮:编辑与运行EDIT\RUN 看控制台右边的led屏上面出现“,,”后,表示编程开始 第二步
选择控制台左下角的P1—P12 按钮控制台led屏则会出现相应的数字表示待编程序的次序 如:选择P1 LED屏上刚刚出现“,”的地方则会显示“1” 表示待编的程序号为“1”。 第三步 这时四个灯是表示控制的目前的四个电脑摇头的。如 :按亮P1
则表示现在1号灯开始受到控制 P1—P4四个推子分别表示的功能是 P1:颜色 P2: 图案 P3:图案旋转 P4:亮度\频闪 P6—P8推子分别表示的是 P5、P6:摇头灯的X、Y、轴运动方向 P7:有待考证P8:棱镜 (这里要说到了一个翻页的问题)
这右下角的三个按键表示的是翻页的意思 SA亮时是P1—P8推子工作 ;SB亮时是P9—P16推子工作;SC亮时表示P17—P24工作 当按下SB时 P1就变成P9 表示的是棱镜的旋转 P10表示所有的选项复位。 第四步 当我们选好灯后,一边开始先推第四个推子调好亮度,在开始调节灯的高、色彩、图案、旋转等。 调节好了第一个灯后,把灯对应的按钮按息,则表示第一个等调试完毕。再按照第一个灯的步骤,开始调节第二个,第三个,。。。。。。。。 也可以在调节好第一个灯后,再把第二个灯的位置调节到位,这时控制台上只有第二个灯的按钮是开着的,
热泵控制器资料
空气能热泵地暖供热系统控制要求 概述 1适用于冷风热水机系统,并配有线控液晶操作面板,水温显示范围-10~90℃,电源为380V\50HZ. 2基本要求 1)工作模式:单循环模式 2)可显示回水温度及设置温度,具有查询功能 3)带回水功能 4)掉电自动记忆各种参数 5)具有完善的保护功能及显示 6)具有定时开关机功能(实时开关),带电池(可自动充电) 7)操作面板的温度设定范围是5℃~90℃ 8)温度控制精度:1℃ 9)单台压缩机控制运行 10)感温器故障自检功能 11)液晶显示带背光 3室外电控板的控制信号 1)压缩机*1:单台压缩机系统(380V) 2)外风机*1单风机(220 V) 3)水泵*1 4)回水阀 5)四通阀 6)曲轴加热 7)电子膨胀阀 8)温度感温探头*8(出水,回水,外环境,外盘管,回气,中气进,中气出,压缩机排气 9)操作面板通信(线控) 10)保护开会(高/压保护开关*1(常闭),水流开关(常闭),水压开关(常闭) 二.要求 1上电后,开关键旁边的绿灯亮,待机状态:显示时间,水温(3分钟延迟)循环模式 1)制热运行流程:水泵启动---(迟20秒)外机启动---(延迟20秒)压缩机启动 2)退出流程:压缩机关闭---迟30秒外风机关闭------延迟30秒水泵关闭 2 化霜:进入化霜条件,a室外温度与蒸发器出口处温度差大于8度(可调),b压缩机连续运行时间大于10分钟(可调),满足这两项条件进入化霜运行,液晶屏显示化霜。
退出化霜条件:a室外温度与蒸发器出口处温度差小于2度(可调),b化霜时间大于或等于化霜运行时间9分钟(可调) 化霜运行流程:满足化霜条件----进入化霜运行----压缩机停-----(延时55秒)四通阀接通----外风机关闭----延时5秒压缩机启动 化霜退出流程:满足退出化霜条件---压缩机停----延时55秒外风机启动----四通阀关闭-----延时5秒压缩机启动----液晶屏显示消除化霜 强制除霜功能,【定时开】键10秒 1)系统进入除霜运行,液晶屏显示化霜。 2)运行条件:开机或待机状态均可调节 3)按【开关】键退出强制除霜 二,压缩机:开启条件,a室内温度低于15度(可调),b回水温度小于30℃(可调) 满足其中一项开启。 待机条件:室内温度高于20度(可调) 4水泵 在压缩机启动前40秒,水泵先启动 在压缩机关闭后60秒,水泵才关闭 5高低压保护【常闭】 1)当检测到高压保护开关断开并持续5秒,则机组停机,当检测到高压保护开关闭合,机组开机(压缩机必须满足3分钟延迟的要求)2)当高压保护在1小时内检测到3次或连续断开超过30分钟,则进入机组保护状态显示相应的故障代码 3)在参数设置中,增加一个高压选择功能{可选择有或无,默认为有此功能}当设定无此功能时,不检测高压保护。 6低压保护开关【常闭】 4)当检测到低压保护开关断开并持续10秒,则机组停机,当检测到低压闭合时,机组开机(压缩机必须满足3分钟延时的要求) 5)当低压保护在1小时内检测到3次或连续断开超过30分钟,则进入机组保护状态,显示相应的故障代码。 6)但是在压机刚启动低压设定时间t低(默认为5min,范围是1~15min)内,和在化霜期间,系统不检测; 7)在参数设置中,增加1个低压选择(有或无)功能(默认为有此功能,可选),当设定无此功能时,则不检测低压保护; 8)当环境温度≤设定温度T环6时,(默认为5℃,范围是-9℃--15℃),系统不检测低压。 11.水流开关保护【常闭】 在水泵运行25秒后,开始检测水流开关,若断开并持续5秒,则机组停机进入保护状态,显示故障E04; 12.水流不足温差保护 在水泵运行60秒后,若出水温度—回水温度≥水流温差保护设定值,并持续10秒,则机组停机进入保护状态,显示故障E09;
双电源切换应用电路
双电源切换应用电路 Company Document number:WTUT-WT88Y-W8BBGB-BWYTT-19998
功率P-FET控制器LTC4414 LTC4414是一种功率P-EFT控制器,主要用于控制电源的通、断及自动切换,也可用作高端功率开关。该器件主要特点:工作电压范围宽,为~36V;电路简单,外围元器件少;静态电流小,典型值为30μA;能驱动大电流P沟道功率MOSFET;有电池反极性保护及外接P-MOSFET的栅极箝位保护;可采用微制器进行控制或采用手动控制;节省空间的8引脚MSOP封装;工作温-40℃+125℃。 图1 LTC4414的引脚排列引脚排列及功能 LTC4414的引脚排列如图1所示,各引脚功能如表1所示。 图2 LTC4414结构及外围器件框图 基本工作原理 这里通过内部结构框图及外接元器件组成的电源自动切换电路来说明其工作原理。内部结构框图及外围元器件组成的电路如图2所示。其内部结构是由放大器A1、电压/电流转换电路、电源选择器(可由VIN端或SENSE端给内部电路供电)、模拟控制器、比较器C1、基准电压源()、线性栅极驱动器和栅极电压箝位保护电路、开漏输出FET及在CTL内部有μA的下拉电流源等组成。外围元器件有P沟道功率MOSFET、肖特基二极管D1、上拉电阻RPU、输入电容CIN及输出电容COUT。 图2中有两个可向负载供电的电源(主电源及辅电源),可以由主电源单独供电,也可以接上辅电源,根据主、辅电源的电压由LTC4414控制实现自动切换。这两种供电情况分别如下。 1 主电源单独供电
主电源单独供电时,电流从LTC4414的VIN端输入到电源选择器,给内部供电。放大器A1将VIN和VSENSE的差值电压放大,并经过电压/电流转换,输出与VIN-VSESNSE之值成比例的电流输入到模拟控制器。当VIN-VSESNE>20mV时,模拟控制器通过线性栅极驱动器及箝位保护电路将GATE 端的电压降到地电平或到栅极箝位电压(保证-VGS≤),使外接P-MOSFET 导通。与此同时,VSESNE被调节到VSESNE=VIN-20mV,即外接P-MOSFET的VDS=20mV。P-MOSFET的损耗为ILOAD×20mV。在P-MOSFET 导通时,模拟控制器给内部FET的栅极送低电平,FET截止,STAT端呈高电平(表示P-MOSFET导通)。 2 加上辅电源 当加上辅电源(如交流适配器)后,如果VSESNE> VIN+20mV,则内部电源选择器由SENSE端向内部电路供电。模拟控制器使GATE端电压升高到VSENSE,则P-MOSFET截止,辅电源通过肖特基二极管D1向负载供电。这种电源切换是自动完成的。 在辅电源向负载供电时,模拟控制器给内部FET的栅极送高电平,FET导通,STAT端呈低电平(表示辅电源供电)。上拉电阻RPU的阻值要足够大,使流过FET的电流小于5mA。 在上述两种供电方式时,CTL端是接地或悬空的。CTL的控制功能将在下面的应用电路介绍。 典型应用电路 1主、辅电源自动切换电路
灯光控制台说明书
灯光控制台说明书
一、灯光配接 1.电脑摇头灯、帕灯需用灯库配接。配接时所有推子归( 0),注意:预置推杆(调光,绿灯亮) 灯具配接如下: 配接灯具(红灯亮 ) 光束灯-230W →DMX 000(转盘V )修改地址码→ 配接帕灯→LEDPAR7→DMX 000(转盘→选择灯 配接天排灯→LEDPAR8→DMX 000(转盘→选择 配接常规灯→DMXMER →DMX 000(转盘→选择灯 具页与未配接通道连接。
二、数据备份与读取(插入U盘,U盘格式:FAT32) 备份:设置→优盘管理→保存数据 A →(转盘V修改名称)→确认 读取:设置→优盘管理→读取数据 B →确认 三、帕灯操作流程 1.帕灯通道:1-7(见图表1)总控(推到10)→选择通道→定位(点炮)→属性页(选择功能)→转盘 A / B控制 四、电脑摇头操作流程 1.电脑灯通道:9-14(见图表3)总控(推到10)选择通道→定位(点炮)→属性页(选择功能)→转 盘A / B控制 五、天排灯操作流程 1.天排灯通道:8(见图表2)总控(推到10)选择通道→定位(点炮)→属性页(选择功能)→转盘 A/ B控制 六、单步场景编辑 控台有许多功能来产生一个复杂的灯光场景,而最基础的就是单步场景,即编程时所看到的场景。 控台有60个重演,分2 X 3页,每页10个,可用于存储单步场景和多步场景。 在运行模式下使用推杆和重演区的按键控制重演,在编程模式下使用重演区的按键进行编辑。 6.1创建 1)按<清除>键清空编程区。 2)使用灯具编出舞台效果,可以加入内置效果。只有编辑过的灯具才会进入编程区中。 3)按下<单景/素材>键,此时重演区里未储存场景的场景键的绿色指示灯会闪烁,存储有单步场景的绿 色指示灯会常亮,存储有多步场景的绿色指示灯是熄灭状态。 4)按显示屏右边的
(完整word版)FANUC焊接机器人控制系统介绍、应用故障分析及处理
FANUC焊接机器人控制系统介绍、应用故障分析 及处理 FANUC机器人主要应用在奇瑞公司乘用车一厂和乘用车三厂的焊装车间中,其控制系统采用32位CPU 控制,采用64位数字伺服驱动单元,同步控制6轴运动;支持离线编程技术;控制器内部结构相对集成化,这种集成方式具有结构简单、整机价格便宜且易维护保养等特点。 焊接是工业生产中非常重要的加工方式,同时由于焊接烟尘、弧光和金属飞溅的存在,焊接的工作环境非常恶劣,随着人工成本的逐步提升,以及人们对焊接质量的精益求精,焊接机器人得到了越来越广泛的应用。 机器人在焊装生产线中运用的特点 焊接机器人在高质、高效的焊接生产中发挥了极其重要的作用,其主要特点如下: 1.性能稳定、焊接质量稳定,保证其均一性 焊接参数如焊接电流、电压、焊接速度及焊接干伸长度等对焊接结果起决定性作用。人工焊接时,焊接速度、干伸长等都是变化的,很难做到质量的均一性;采用机器人焊接,每条焊缝的焊接参数都是恒定的,焊缝质量受人为因素影响较小,降低了对工人操作技术的要求,焊接质量非常稳定。 2.改善了工人的劳动条件 采用机器人焊接后,工人只需要装卸工件,远离了焊接弧光、烟雾和飞溅等;点焊时,工人不再需要搬运笨重的手工焊钳,从大强度的体力劳动中解脱出来。 3.提高劳动生产率 机器人可一天24h连续生产,随着高速、高效焊接技术的应用,使用机器人焊接,效率提高地更加明显。 4.产品周期明确,容易控制产品产量 机器人的生产节拍是固定的,因此安排生产计划非常明确。 5.可缩短产品改型换代的周期,降低相应的设备投资 可实现小批量产品的焊接自动化。机器人与专机的最大区别就是它可以通过修改程序以适应不同工件的生产。 FANUC机器人控制系统 1.概述 FANUC机器人主要应用在奇瑞公司乘用车一厂和乘用车三厂的焊装车间中,是奇瑞公司最早引进的焊接机器人,也是最先用到具有附加轴的焊接机器人。其控制系统采用32位CPU控制,以提高机器人运动插补运算和坐标变换的运算速度;采用64位数字伺服驱动单元,同步控制6轴运动,运动精度大大提高,最多可控制21轴,进一步改善了机器人动态特性;支持离线编程技术,技术人员可通过离线编程软件设置参数,优化机器人运动程序;控制器内部结构相对集成化,这种集成方式具有结构简单、整机价格便宜且易维护保养等特点。其控制原理如图1所示。
无线DMX512收发模块CN
无线DMX512收发模块 简介: 无线DMX512收发模块以无线的方式传输标准的DMX512数据,也可传输灯具与灯具间的联机数据。该产品彻底解决了灯光控制台与灯,灯与灯之间数据的无线传输,完全去掉长期以来所依赖的双绞线。在数据的传输过程中做到无时延,数据实时可靠! 该产品采用2.4G全球开放ISM频段,免许可证使用. 高效GFSK调制,29频道自由选择,抗干扰能力强. 该模块历经多次改进最终成熟,以低廉的价格直接提供用户,使用成熟易用的接口,将以往难以驾驭的协议栈开发过程简化为串口与IO 口的简单操作,详细严谨的技术参数保证用户完全掌控网络性能,帮助客户实现“稳定高效,直接上手,一天做项目”。 模块为全速单向收发,发射模块只发不收,接收模块只收不发,在通信范围内可以一发多收,理论上接收模块数量不受限制。 适合领域: DMX512舞台灯光产品的升级换代 产品外观:
发送模块 接收模块 产品性能指标 1. 产品名称: 2.4G 无线DMX512收发模板 2. 体积小巧,便于嵌入灯具内部使用 3. 传输标准的DMX512控台数据,也可传输灯具与灯具间的联机数据 4. 29组ID 编码可设置,用户可在一个地方使用独立的29组无线网络而互不干扰. 5. 输入电压: DC3V-DC3.6V 6. 工作频段:2400-2483.5 MHz 7. 输出功率: -10 dBm -- 22.5 dBm (实测符合标称) 8. 接收灵敏度:-97 dBm (实测符合标称) 9. 信号改善: 6dB (实测符合标称) 10. 接收电流: 25Ma 11. 149mA (@ 19 dBm ) 12. 信号接口: CPU 串行口AURT 产品优势
STM控制器资料
第四章BACnet专用控制器软硬件系统 4.1 BACnet专用控制器硬件系统 4.1.1硬件结构 本控制器的硬件平台为嵌入式STM32V5开发板,主要由STM32F103微控制器组成,该微控制器带有以太网接口和RS485接口,其他还包括电源模块、ADC(数/模转换器)模块、存储器单元等错误!未找到引用源。。硬件模型如下图所示: 路由器 工作站 图控制器硬件构成 4.1.2 STM32MCU简介 本控制器主芯片选用基于ARM Cortex-M3 32位RISC内核的高性能STM32F103VET6。因为拥有内置的ARM内核,因此它与所有的ARM工具和软件兼容,所以软件开发平台我们选取Keil μVision5。芯片的主要特性如下:●工作频率为72MHz; ●工作电压为2.0V--3.6V,工作温度在-40°C至+105°C的范围; ●它具有100引脚封装,有着多达80个快速I/O端口和联接到两条APB总线 的外设; ●内置高速存储器(128K字节的闪存和20K字节的SRAM); ●2个12位的ADC,用于对输入电源和负载电流检测,具有双采样和保持功
能,A/D测量范围:0-3.6 V,片上集成了温度传感器; ●拥有4个通用16位定时器、2个看门狗定时器以及一个PWM定时器,所以 在时序方面能够达到BACnet需求。 ●3个USART接口,其中一个用于MS/TP总线的串口收发; ●2个I2C(SMBus/PMbus)和2个SPI同步串行接口(1兆位/秒); ●内嵌4至16MHz高速晶体振荡器、带校准功能的32kHz RTC振荡器、40kHz 的RC振荡器、经出厂调校的8MHz的RC振荡器; ●一个USB和一个CAN接口; ●支持三种低功耗模式:睡眠模式、停机模式和待机模式,用以保证低功耗应 用的省电要求。 ●调试模式包括:串行线调试(SWD)和JTAG接口,本文使用JTAG调试。 4.1.3 RS485通信模块 本控制器中使用的RS-485收发器芯片为SP3490。SP3490是+3.3V低功耗的全双工收发器,符合RS-485电气规范,能够满足本文控制器有关串行通信的需求,数据传输速率可高达10Mbps(带负载),可实现低功耗操作,而且同时不会降低性能。其他特性还包括: ●可与+5V的逻辑电路共同工作; ●-7V~+12V的共模输入电压范围; ●±200mV 的接收器输入灵敏度; ●允许在同一串行总线上连接32个收发器等; ●兼容LTC490 和SN75179。 图4-2 RS-485接口电路 4.1.4电源模块 通过稳压器AMS1117-3.3输入+5V,提供3.3V的固定电压输出,为了降低
双电源自动转换开关说明书
双电源自动转换开关说明书 相信大家一定都购买过双电源自动转换开关,顾名思义它是在用电突然断电时通过双电源切换开关,自动连接到备用的电源上,使我们的运作不至于停断,仍能继续运作。这种开关在我们生活的很多地方都有用到,许多公司和小区都有,那么让装修界为您具体的讲解通过双 电源切换开关的原理以及说明书。双电源自动切换开关电器主要用在紧急供电系统,将负载
电路从一个电源自动换接至另一个(备用)电源的开关电器,以确保重要负荷连续、可靠运行。因此,常常应用在重要用电场所,其产品可靠性尤为重要。转换一旦失败将可能造成以下二种危害之一,其电源间的短路或重要负荷断电(甚至短暂停电),其后果都是严重的,这不仅仅会带来经济损失(使生产停顿、金融瘫痪),也可能造成社会问题(使生命及安全处于危险之中)。因此,工业发达国家都把自动转换开关电器的生产、使用列为重点产品加以限制与规范。双电源自动切换开关一般由两部分组成:开关本体(ats)+控制器。而开关本体(ats)又有pc级(整体式)与cb级(断路器)之分,双电源自动转换开关电器(atse)质量的好坏关键取决于开关本体(ats)。1.pc级ats:一体式结构(三点式)。它是双电源切换的专用开关,具有结构简单、体积小、自身连锁、转换速度快(0.2s内)、安全、可靠等优点,但需要配备短路保护电器。 2.cb级ats:配备过电流脱扣器的ats,它的主触头能够接通并用于分断短路电流。它是由两台断路器加机械连锁组成,具有短路保护功能控制器的工作状况控制器主要用来检测被监测电源(两路)工作状况,当被监测的电源发生故障(如任意一相断相、欠压、失压或频率出现偏差)时,控制器发出动作指令,开关本体则带着负载从一个电源自动转换至另一个电源,备用电源其容量一般仅是常用电源容量的20%~30%。图1是典型ats应用电路。控制器与开
舞台灯光DMX512控制协议详解
舞台灯光 DMX512 控制协议详解
DMX512 协议最先是由 USITT (美国剧院技术协会) 发展成为从控制台用标准数字接口控制调光器的方式。 DMX512 超越了模拟系统,但不能完全代替模拟系统。DMX512 的简单性、可靠性(假如能够正确安装和 使用的话!)以及灵活性使其迅速成为资金允许情况下选择的协议,除了调光器外,一系列不断增长的控 制设备就是证据。DMX512 仍然是科学上的一个新领域,具有在规则基础上产生的各种奇妙技术。 EIA485(RS485) DMX512 是围绕工业标准 EIA485 接口设计的。EIA485 属于接口、电压、电流等的“电”端。 系统是基于沿着屏蔽导体双绞线的向下对称发送而建立的。 这种缠绕结构确保所产生的干扰会同样地作 用于两个信号,因此保证了一致的数字定相。所用的导线应该是由一条或两条双绞线、箔片和编织筛所构 成的合适的数据导线。对称音频导线则不能完成这个工作。 通常地,就如任何网段一样,导线两头应该有两个终端。灯光控制台通常在一头作为终端,而另一头应 该只有一个 120Ω 的电阻。 EIA485 规范只支持“雏菊链”或每段上最多以 32 个“单元负载”所构成的串行网络。制造商声称每段可以 长达 1000m。但是,要特别指出的是,中继器的作用应该考虑到 700m 或 800m 左右,这样可以防止环境 的异常。 XLR 连接器的针口分配(表 1) 针线 1 屏蔽 信号 地/0 伏 数据– 数据+ 备用数据- 备用数据+
2 内部导体(黒) 3 内部导体(白) 4 内部导体(绿) 5 内部导体(红)
DMX512 控制线采用 5 针 XLR(有时候是 3 针)连接设备(如表 1);母接口适用于发送器,而公接口适 用于接收器。 规范中建议用一条两对导线(4 个连接口)来实现屏蔽,虽然只是需要其中一对。第二对导线用于未指 定的可选场合中。 必须注意的是一些调光器使用这些线来指示故障和状态信息。如果调光器用第二个信道,则需要专门配 置的分路器和中继器。
控制器的工作原理介绍
控制器的工作原理介绍 控制器是指按照预定顺序改变主电路或控制电路的接线和改变电路中电阻值来控制电动机的启动、调速、制动和反向的主令装置。由程序计数器、指令寄存器、指令译码器、时序产生器和操作控制器组成,它是发布命令的“决策机构”,即完成协调和指挥整个计算机系统的操作。 控制器的分类有很多,比如LED控制器、微程序控制器、门禁控制器、电动汽车控制器、母联控制器、自动转换开关控制器、单芯片微控制器等。 1.LED控制器(LED controller):通过芯片处理控制LED灯电路中的各个位置的开关。控制器根据预先设定好的程序再控制驱动电路使LED阵列有规律地发光,从而显示出文字或图形。 2.微程序控制器:微程序控制器同组合逻辑控制器相比较,具有规整性、灵活性、可维护性等一系列优点,因而在计算机设计中逐渐取代了早期采用的组合逻辑控制器,并已被广泛地应用。在计算机系统中,微程序设计技术是利用软件方法来设计硬件的一门技术。 3.门禁控制器:又称出入管理控制系统(Access Control System) ,它是在传统的门锁基础上发展而来的。门禁控制器就是系统的核心,利用现代的计算机技术和各种识别技术的结合,体现一种智能化的管理手段。 4.电动汽车控制器:电动车控制器是用来控制电动车电机的启动、运行、进退、速度、停止以及电动车的其它电子器件的核心控制器件,它就象是电动车的大脑,是电动车上重要的部件。 上述只是简单的介绍了几种控制器的名称和主要功能,控制器的种类繁多、技术不同、领域不同。 在控制器领域内,高标科技作为一家国家级的高新企业,其主打产品是电动车控制器,并且在电动车控制领域内占有很重要的地位,之前已经说到电动车控制器是用来控制电动车电机的启动、运行、进退、速度、停止以及电动车的其它电子器件的核心控制器件,它就象是电动车的大脑,是电动车上重要的部件。高标科技在这里为大家介绍一下高标控制器的基本工作原理: (一)高标科技电动车控制器的结构 电动车控制器是由周边器件和主芯片(或单片机)组成。周边器件是一些功能
电脑灯控制台的功能与操作
第4章电脑灯控制台的功能与操作 数字调光控制台从规模上可分为中小型控台、大型控台和网络控台等类别,根据功能特点又可分为“通用数字控台”和“电脑灯控台”两类。前者可控制所有支持DMX512协议的灯具,具有完善的调光、集控等功能;后者虽然在理论上也可控制所有支持DMX512协议的灯具,但其功能主要是针对电脑灯的特点而“量身定制”的,堪称是电脑灯“专用”控制台。本章介绍中小型“电脑灯控台”的功能特点与操作方法,旨在帮助初涉灯光控制的人员既掌握中小型控台的基本操作,又能为“驾驭”大型控台奠定必要的基础。 阳光512(Sunny512)电脑灯控制台有2个光电隔离独立信号输出端口,可以控制512个DMX通道,有16个通道推杆,32个选灯容量,48个场景,48个走灯程序,15个环境程序,是中小型电脑灯控台的代表性产品。本章以该控台为例予以尽可能详尽的介绍。 4.1 阳光512控台功能简介 阳光512电脑灯控台的控制面板由选灯区、场景区、走灯区、环境区、推杆控制区、编辑控制区及切光、走灯速度、声控键、功能状态显示屏等构成,其控制面板及功能分布如图4.1所示。其中,切光(BLACKOUT)又叫黑场,可一键关闭所有受控灯具的发光状态,一般在节目换场时使用,再按一次,所有灯具又回到切光前的状态。工作灯电源可对外提供12V 电压输出,可驱动鹅颈工作灯,用于夜间工作照明。 图4.1阳光512控台的控制面板及功能布局 图4.2是阳光512控台的后面板,2个DMX512信号输出端口,一个为公口,一个为母口,二者输出数据相同,在使用时可根据电缆的接口类型择其一而用之,也可同时使用两个接口分别连接若干台灯具,但控制总容量仍为512个通道,而不是1024个通道。声控输入用来输入音乐信号,当控台面板上的声控键按下时,灯光状态可受音乐节奏的触发同步动作。存贮锁定钥匙处于水平状态(在红点位置)时,设定的场景、走灯等数据在断电后可保存,否则断电后数据丢失。
si9979控制器资料
Si9979 Vishay Siliconix Document Number: 70012S-41209—Rev. E, 21-Jun-04 https://www.360docs.net/doc/8418552888.html, 1 3-Phase Brushless DC Motor Controller FEATURES Hall-Effect Commutation 60 or 120 Sensor Spacing Integral High-Side Drive for all N-Channel MOSFET Bridges PWM Input Quadrature Selection Tachometer Output Reversible Braking Output Enable Control Cross Conduction Protection Current Limiting Undervoltage Lockout Internal Pull-Up Resistors DESCRIPTION The Si9979 is a monolithic brushless dc motor controller with integral high-side drive circuitry. The Si9979 is configured to allow either 60or 120 commutation sensor spacing. The internal low-voltage regulator allows operation over a wide input voltage range, 20- to 40-V dc. The Si9979 provides commutation from Hall-effect sensors.The integral high-side drive, which utilizes combination bootstrap/charge pump supplies, allows implementation of an all n-channel MOSFET 3-phase bridge. PWM, direction, quadrature select, and braking inputs are included for control along with a tachometer output. Protection features include cross conduction protection, current limiting, and undervoltage lockout. The FAULT output indicates when undervoltage, over current, disable, or invalid sensor shutdown has occurred.The Si9979 is available in both standard and lead (Pb)-free 48-pin SQFP packages and is specified to operate over the commercial temperature range of 0 to 70C (C suffix), and the industrial temperature range of ?40 to 85C (D suffix). FUNCTIONAL BLOCK DIAGRAM IN A IN C BRK PWM TACH QS V+ GT A F/R EN R T V DD I S ?I S + R T /C T S A GT B S B CAP A CAP B GB A GB B GND GT C S C CAP C GB C FAULT IN B 60/120 End of Life. Last Available Purchase Date is 31-Dec-2014
双电源切换控制器产品说明书
双电源切换控制器 产品说明书 安装、使用产品时,注意人身安全,并请仔细阅读说明书 安徽鑫龙电器股份有限公司 ANHUI XINLONG ELECTRICAL CO., LTD
目录 1.概述 (2) 2. 技术参数 2.1 规格参数 (3) 2.2 安全性能 (3) 3. 控制器外形结构与安装连线 3.1 详细尺寸 (4) 3.2 控制器接线端子 (4) 3.3 控制器典型接线图 (5) 4. 操作面板 4.1 操作按键功能说明 (8) 4.2发光二极管功能说明 (9) 4.3 LED数码管指示说明 (9) 5. 控制与操作说明 5.1 菜单结构 (10) 5.2 菜单说明 (11) 5.3 操作范例 (13) 6. 通讯功能 (17) 7. 故障排除 (17) 附录:选型表 (18)
1. 概述 双电源切换控制器(以下简称:控制器)是一种集测量显示、控制、三遥等功能为一体的自动转换控制器。 适用于交流50Hz、额定电压220V的两路电源,因一路电源断电或故障,自动将负载切换到另一路电源的场合。具有以下特点: ●基于ARM的微处理器控制,实时测算电网参数,运算速度快,测量精度 高; ●控制器由主、副三相电源同时供电。任何时候,只要有一相电源正常, 即可保证控制器的正常工作,无需额外工作电源,适用场合非常广泛; ●通过LED数码管和发光二极管显示控制器的运行状态、运行参数以及电 网参数; ●自动对电源的过压、欠压、过频、欠频、断相及负载过流(三段式)故 障进行监控,并按设置的整定值进行控制; ●具有手动/自动操作模式:自动模式时,电源的切换由控制器自动控制; 手动模式时,电源的切换由面板上手动控制按键完成。 ●具有自复/自投操作控制模式; ●双路电源的主副端定义可以按用户需求设置; ●可以外接手动按钮(拥有最高优先操作权),以实现远程操控。 ●可以外接手动双分按钮(三段式),以实现远程操控。 ●具有24V消防联动功能(三段式)。 ●可以通过RS485通讯口实现对控制器的遥测、遥信及遥控。 产品型号说明: 双电源切换智能控制器(BlueLight系列)根据应用场合和功能的不同分为多个型号。型号说明如下图:
焊接机器人发展现状及发展趋势!
焊接机器人发展现状 我国的工业机器人从80年代“七五”科技攻关开始起步,目前已基本掌握了机器人操作机的设计制造技术、控制系统硬件和软件设计技术、运动学和轨迹规划技术,生产了部分机器人关键元器件,开发出喷漆、弧焊、点焊、装配、搬运等机器人;弧焊机器人已应用在汽车制造厂的焊装线上。但总的来看,我国的工业机器人技术及其工程应用的水平和国外比还有一定的距离,如:可靠性低于国外产品;机器人应用工程起步较晚,应用领域窄,生产线系统技术与国外比有差距;应用规模小,没有形成机器人产业。 当前我国的机器人生产都是应用户的要求,单户单次重新设计,品种规格多、批量小、零部件通用化程度低、供货周期长、成本也不低,而且质量、可靠性不稳定。因此迫切需要解决产业化前期的关键技术,对产品进行全面规划,搞好系列化、通用化、模块化设计,积极推进产业化进程。 焊接机器人的编程方法目前还是以在线示教方式为主,但编程器的界面比过去有了不少改进,尤其是液晶图形显示屏的采用使新的焊接机器人的编程界面更趋友好、操作更容易。然而,机器人编程时焊缝轨迹上的关键点坐标位置仍必须通过示教方式获取,然后存入程序的运动指令中。这对于一些复杂形状的焊缝轨迹来说,必须花费大量的时间示教,从而降低了机器人的使用效率,也增加了编程人员的劳动强度。目前解决的方法有两种:一是示教编程时只是粗略获取几个焊缝轨迹上的几个关键点,然后通过焊接机器人的视觉传感器通常是电弧传感器或激光视觉传感器自动跟踪实际的焊缝轨迹。这种方式虽然仍离不开示教编程但在一定程度上可以减轻示教编程的强度,提高编程效率。由于电弧焊本身的特点,机器人的视觉传感器并不是对所有焊缝形式都适用。二是采取完全离线编程的办法,使机器人焊接程序的编制、焊缝轨迹坐标位置的获取、以及程序的调试均在一台计算机上独立完成,不需要机器人本身的参与。机器人离线编程早在多年以前就有,只是由于当时受计算机性能的限制,离线编程软件以文本方式为主,编程员需要熟悉机器人的所有指令系统和语法,还要知道如何确定焊缝轨迹的空间位置坐标,因此,编程工作并不轻松省时。随着计算机性能的提高和计算机三维图形技术的发展,机器人离线编程系统多数可在三维图形环境下运行,编程界面友好、方便,获取焊缝轨迹的坐标位置通常可以采用“虚拟示教”的办法,用鼠标轻松点击三维虚拟环境中工件的焊接部位即可获得该点的空间坐标;在有些系统中,可通过图形文件中事先定义的焊缝位置直接生成焊缝轨迹,然后自动生成机器人程序并下载到机器人控制系统。从而大大提高了机器人的编程效率,也减轻了编程员的劳动强度。目前,国际市场上已有基于普通机的商用机器人离线编程软件,通过虚拟示教获得,并在三维图形环境中可让机器人按程序中的轨迹作模拟运动,以此检验其准确性和合理性。所编程序可通过网络直接下载给机器人控制器。 焊接机器人发展趋势 目前国际机器人界都在加大科研力度,进行机器人共性技术的研究。从机器人技术发展趋势看,焊接机器人和其它工业机器人一样,不断向智能化和多样化方向发展。具体而言,表现在如下几个方面: 1).机器人操作机结构: 通过有限元分析、模态分析及仿真设计等现代设计方法的运用,实现机器人操作机构的优化设计。 探索新的高强度轻质材料,进一步提高负载/自重比。例如,以德国KUKA公司为代表的机器人公司,已将机器人并联平行四边形结构改为开链结构,拓展了机器人的工作范围,加之轻质铝合金材料的应用,大大提高了机器人的性能。此外采用先进的RV减速器及交流伺服电机,使机器人操作机几乎成为免维护系统。
DMX512(192)控制台简单使用说明
DMX512(192)控制台简单使用说明
DMX512(192)电脑控制台简单上手说明书 一、功能说明 1、SCANNERS:电脑灯开启通道(1—12)。 2、SCENS:功能参数推杆,(PAGE SELECT)A---B 翻页。调控参数16 个。 3、BANK:上下数字键,101----130改变。 4、PROGRAM:编程进入键。 5、MIDI/ADD:编辑储存键。 6、AUTO/DEL:程序运动和程序删除键。 7、CHASE1----CHASE6:场编辑键。 8、BLACK OUT:关闭程序键。 9、FADE TIME--SPEED:程序运行时间和每步运行时停留速度。 二、操作使用说明 1、打开电脑灯的电源,待灯启动后再开启512控制台电源开关,液晶显示 屏显示101数字。 2、按住编程键PROGRAM两秒进入编程。显示器左下角相对应的地方出 现一个小亮点。打开电脑灯通道SCANNERS1—12、相对应的指示灯亮。 3、推动SCENS功能参数推杆改变每个通道的参数值。 4、快速按住MIDI/ADD键一下放开在按住SCENS上的数字键2一下放开, 屏幕相对应闪烁一下第一个101的景就储存了。编第二个景方法:按住 MIDI键一下放开再按住数字键3一下放开,屏幕闪烁一下就储存了第二 个。就是编101时按数字键2、编201时按数字键3,编前一个景按后一 个数字键,依次类推。 5、编好后{101----801}8个景后按住PROGRAM键两秒就储存了8个景了。 屏幕左上角亮一个小点。按住BLACK OUT键一下在按AUTO/DEL键 后屏幕右下角指示灯亮8个景开始运行。推动SPEED和FADE TOM推 杆改变运行速度和时间。设置摇头灯的速度时运行的速度不要过快、以 免失步。 6、同上步1---5步编辑102---802、103----803、104---804。。。。。。。。 7、编辑一个CHASE1时按住PROGRAM键两秒进入编辑屏幕左下角指示 灯亮再按CHASE1显示1101。如要把101---801、102----802;都编进去。 步骤1、按一下数字键1放开再按MIDI键一次101就储存了2、按一下 数字键2放开再按MIDI键一次就储存了201。步骤循环101-----801、 102----802都编进去。编辑方法和编景的步骤相反。储存和运行相同。 8、删除也是先进PROGRAM键再按AUTO/DELL键不放按数字键就行 了,删除哪个景就点按一下哪个数字键。此时CHASE1中的景相对应的 景就没了。 编辑:杨斌 2006年5月1号