Supporting physicians in taking decisions in clinical guidelines the glare’s ”what if” f

Supporting Physicians in Taking Decisions in Clinical Guidelines:
the GLARE “What if” Facility
Paolo Terenziani1, Stefania Montani1, Alessio Bottrighi1, Mauro Torchio2, Gianpaolo Molino2 1DI, Univ. Piemonte Orientale “A. Avogadro”, Spalto Marengo 33, Alessandria, Italy
2Lab. Informatica Clinica, Az. Ospedaliera S. G. Battista, C.so Bramante 88, Torino, Italy
GLARE (GuideLine Acquisition, Representation and Execution) is a domain-independent system for the acquisition, representation and execution of clinical guidelines. GLARE is unique in its approach to supporting the decision-making process of users/physicians faced with various alternatives in the guidelines. In many cases, the best alternative cannot be determined on the basis of “local information”alone (i.e., by considering just the selection criteria associated with the decision at hand), but must also take into account information stemming from relevant alternative pathways. Exploitation of “global information” available in the various pathways is made possible by GLARE through the “what if”facility, a form of hypothetical reasoning which allows users to gather relevant decision parameters (e.g., costs, resources, times) from selected parts of the guideline in a semi-automatic fashion. In particular, the extremely complex task of coping with temporal information involves the extension and adaptation of various techniques developed by the Artificial Intelligence (AI) community.
1 INTRODUCTION
Optimizing clinical guidelines management and exploitation is a key area of research in Artificial Intelligence (AI) in medicine and medical decision-making [1-3]. Guidelines reflect the current understanding of best clinical practice and can assist physicians in the treatment of disease. They can also serve as a system for critical review and evaluation or for educational aims. Numerous approaches to the creation of computer-assisted tools for guidelines management have been proposed in the literature (e.g.: Asbru [4-5], EON [6], GEM [7], GLIF [8-9], GUIDE [10], ONCOCIN [11], PROforma [12], T-HELPER [13], and also [14-15]). In this paper, we describe GLARE [16,17], a user-friendly and domain-independent system supporting guideline acquisition, representation and execution.
2 MAIN FEATURES OF GLARE Representation formalism. In contrast to several representation formalisms described in the literature which provide a wide set of primitives (see, e.g., EON [6]), in GLARE we focused on the trade-off between expressiveness and complexity. In order to guarantee usability of the program to user-physicians not expert in Computer Science we defined a limited set of clear representation primitives, covering most of the relevant aspects of a guideline [16; see also 12]. We distinguish between atomic and composite actions (plans), where atomic actions represent simple steps in a guideline, and plans represent actions which can be further broken-down and defined in terms of their components via the has-part relation. The has-part relation permits top-down refinement: a guideline itself can be seen as a composite action which can be broken down hierarchically into sub-parts. Control relations establish which actions can be executed next, and in what order. We distinguish between four different control relations: sequence, controlled, alternative and repetition. In the sequence and alternative relations, one can choose to indicate the minimum and/or maximum delay between actions. In a set of actions which are in a controlled relation, one can specify the minimum and/or maximum distance between any pair of endpoints of such actions. Finally, two different ways of specifying repetitions are defined (and can be combined): one can state that the action has to be performed until a given exit condition becomes true, or can specify a duration (frame-time) for the repetitions. In both cases, the frequency of the repetitions in time can be specified; then, several other parameters must/can be provided. For example, in the the frequency “
3 times every 2 days” it is necessary to provide the granularity for the repetition (days in the example), the grouping to be considered (2 in the example), and, the number of executions of the action in the given periodicity (3 in the example). Four different types of atomic actions have been defined: work actions (actions to be performed at a certain step of the guideline), query actions (requests for information), decisions (selections among alternatives) and conclusions (explicit output of a decision process). Actions can be described in terms of their attributes. In particular, work actions are characterized by name, description, cost, time, resources, goals. Decision actions can be classified as diagnostic decisions or therapeutic decisions. Diagnostic decisions are represented as an open set of triples
compliance, duration), shown to the user at execution time and allowing for an informed therapy selection. System architecture. As in most approaches in the literature, GLARE distinguishes between the acquisition phase (when a guideline is introduced into the system –e.g., by a committee of expert physicians) and the execution phase (when a guideline is applied to a specific patient). The system architecture is therefore composed of two main modules, the acquisition tool and the execution tool. The tools interact strictly with a set of databases, including the clinical database, which provides physicians with standard terminology, and the patient database, which contains the patients’ data (see [16] for details) . Acquisition tool. The graphical interface of the acquisition tool is used to acquire atomic actions, has-part relations and control relations between the components of plans. The guideline is depicted as a graph, with each action represented as a node (different forms and colours are used to distinguish among different types of actions), while control relations are represented as arcs. By clicking on the nodes in the graph, the user can trigger other windows in order to acquire the internal descriptions (attributes) of the nodes. The interface also shows the hierarchical structure of the guideline in tree-form, where plans can be seen as parents of their components. The acquisition tool provides different forms of consistency checking. Name and range checking is automatically triggered whenever the expert physician introduces a new term or value within the description of an action, by forcing her/him to use only terms/values that have already been defined within the clinical database. Whenever the expert physician introduces a node or arc, different controls are automatically activated to check whether the new element is consistent with several logical design criteria. For example, alternative arcs may only exit from a decision action.
Execution tool. The execution tool is typically used “on-line”: a user physician applies a guideline with reference to a specific patient; the patient’s data is automatically retrieved from the patient database, and exploited by the system. This method is used for integrating guidelines in clinical practice. GLARE is also available for “off-line” execution (for education, critical review and evaluation purposes). During on-line execution, delays between actions in the guideline must be respected at execution time, while during off-line execution the engine must jump directly from one action to the next, without waiting for the given delay. In order to support both modalities, we adopt a technique relying on an “agenda” [16-17], a data structure which contains the next actions to be performed. The execution tool also incorporates a decision support facility, described in section 3.Testing.We have already tested our prototype acquisition and representation system. Several groups of expert physicians, following a few-hour training session, used GLARE in order to acquire algorithms concerning different clinical domains, including bladder cancer, reflux esophagitis, and heart failure. In all the tests, our representation formalism and acquisition tool proved expressive enough to cover the clinical algorithms, and the acquisition of a clinical guideline was reasonably fast (e.g., the acquisition of the guideline on heart failure required 3 days).
3 THE “WHAT-IF” FACILITY GLARE’s execution tool incorporates a decision support facility to assist physicians in choosing among different therapeutic or diagnostic alternatives.
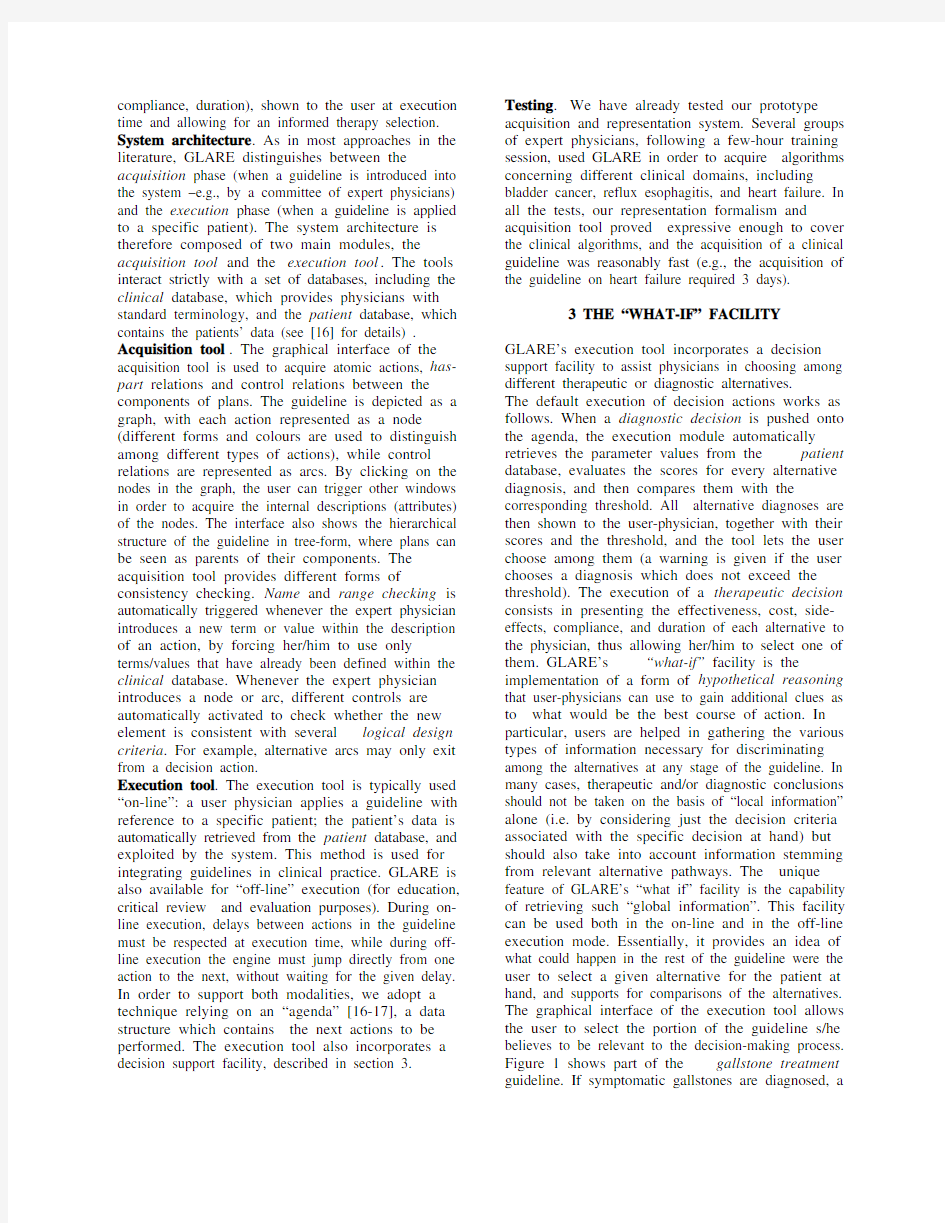
The default execution of decision actions works as follows. When a diagnostic decision is pushed onto the agenda, the execution module automatically retrieves the parameter values from the patient database, evaluates the scores for every alternative diagnosis, and then compares them with the corresponding threshold. All alternative diagnoses are then shown to the user-physician, together with their scores and the threshold, and the tool lets the user choose among them (a warning is given if the user chooses a diagnosis which does not exceed the threshold). The execution of a therapeutic decision consists in presenting the effectiveness, cost, side-effects, compliance, and duration of each alternative to the physician, thus allowing her/him to select one of them. GLARE’s “what-if” facility is the implementation of a form of hypothetical reasoning that user-physicians can use to gain additional clues as to what would be the best course of action. In particular, users are helped in gathering the various types of information necessary for discriminating among the alternatives at any stage of the guideline. In many cases, therapeutic and/or diagnostic conclusions should not be taken on the basis of “local information”alone (i.e. by considering just the decision criteria associated with the specific decision at hand) but should also take into account information stemming from relevant alternative pathways. The unique feature of GLARE’s “what if” facility is the capability of retrieving such “global information”. This facility can be used both in the on-line and in the off-line execution mode. Essentially, it provides an idea of what could happen in the rest of the guideline were the user to select a given alternative for the patient at hand, and supports for comparisons of the alternatives. The graphical interface of the execution tool allows the user to select the portion of the guideline s/he believes to be relevant to the decision-making process. Figure 1 shows part of the gallstone treatment guideline. If symptomatic gallstones are diagnosed, a
surgical approach has to be chosen. Laparoscopic surgery and laparotomic surgery are both suitable methods and therefore indications about the implications of each alternative (in terms of e.g. time and money spent, and resources exploited), could be useful in deciding. The “what if” facility is even more helpful if symptomless gallstones are diagnosed. In this case, three choices are available: expectant management, litholitic therapy, and surgery, which, again, can be either laparoscopic or laparotomic. Thus, in this case, a series of two consecutive therapeutic decisions could be presented to the physician. The exploitation of the “global information” for therapy selection proves extremely relevant, since in this example, as in several other situations, no alternative is really “better” than the others from a strictly clinical viewpoint. The possibility of obtaining a complete scenario of the decision consequences is clearly an added value.
Generally speaking, when the “what-if” facility is activated, the physician is asked to indicate on the graph the starting node of the paths to be compared and (preferably) the ending nodes (otherwise, all the possible paths exiting the starting node will be taken into consideration). Relevant decision parameters (costs, resources, times) will be gathered from the selected portions of the guideline in a semi-automatic way. In particular, whenever a decision action is reached within each path, the user is allowed to choose a subset of alternatives by selecting the corresponding buttons in a pop-up window. If a selection is made, the other alternatives will be ignored by the reasoning process. If a plan is found, it is expanded into its components, and the “what-if” facility is recursively applied to each of them by analyzing all the decision actions that appear at the various decomposition levels. At the end of this process, the tool displays the values of the chosen parameters for each of the selected paths. While resources in a path are simply collected and costs summed up, coping with temporal information is a very complex task which involves the extension and adaptation of different temporal reasoning techniques developed within the AI community (see section 4).
4. TEMPORAL REASONING ISSUES
The “what if” facility can be used to compare the duration of different paths (e.g., to discover the temporally shortest path). The treatment of the “what if” facility involves quite subtle technical work when taking into account the temporal parameter. In fact, three different types of temporal constraints are involved within clinical guidelines dealt with by the GLARE system:
1.“standard” qualitative and quantitative constraints
between actions belonging to the same plan.
These constraints are expressed within the sequence, alternative and controlled relations between actions, and by the durations of actions;
2.implicit constraints implied by the part-of
relations between actions;
3.constraints on the repetition of actions, and on
their periodicity.
Of course, all these constraints must be represented, and the interplay between them must be taken into account by the temporal reasoning process, in order to check consistency and to determine the temporally shortest paths in a correct and complete way. Besides completeness, the tractability of the temporal reasoning process is another main goal we set out to achieve.We based our work on “classical” AI approaches to temporal reasoning based on bounds on differences and on the STP framework [18-20], and extended them to cope with issues (1), (2), and (3) above. The STP framework takes into account conjunctions (sets) of bounds on differences, and can be used to model precise or imprecise temporal locations (dates), durations, delays between points, and different forms of qualitative temporal constraints between time points and/or time intervals [20-21]. This framework has very elegant computational properties: correct and complete propagation of the constraints (e.g., for consistency checking) can be performed in cubic time by a classical all-to-all-shortest-paths algorithm (such as Floyd-Warshall’s), and can furnish the minimal network of the constraints as output (i.e., the minimal constraints between each pair of entities) [18].
Temporal constraints between actions in a GLARE plan (i.e. constraints of type (1) above) can be mapped onto an STP framework, in which each action is represented by its starting and its ending point, and the delays associated with sequence and alternative relations can be mapped as distances between points. From the temporal point of view, we also represent a plan via its starting and its ending point. In this way, the temporal constraints between a plan and the other actions (atomic actions and/or plans) at the same hierarchical level can be simply represented as bound on differences. Moreover, temporal constraints between each plan and its subactions (i.e., constraints of type (2) above) are also represented as constraints between the starting/ending points of the plan and the endpoints of its (direct) subactions. In particular, the starting point of a plan is temporally equal to the starting point of its starting action, while its ending point is after or simultaneous with the ending point of the last action in each alternative path of sub-actions composing it. Thus, the constraints involving actions and plans (which are not repeated) can be homogeneously represented within a unique STP framework, containing a starting and an ending point for each plan and atomic action in the guideline.
Unfortunately, such an homogeneous approach must be significantly extended if one wishes to deal with repeated actions (i.e. with constraints of type (3)). For instance, if P is a repeated plan composed of a sequence of two subactions A1 and A2, what we actually need to represent is the fact that P’s starting point coincides with the starting point of the first repetition of A1, and P’s ending point with the ending point of the last repetition of A2. Such constraints cannot be trivially modeled into the homogeneous STP framework discussed above. We thus chose to represent the constraints regarding repeated actions into separate STP frameworks, one for each repeated plan. Thus, in GLARE, the overall set of constraints in a guideline is represented by a tree of STP frameworks (STP-tree henceforth). The root of the tree is the STP which homogeneously represents the constraints between all the actions (composite and atomic) in the guideline, except repeated actions (which are plans, by our definition). Each node in the STP-tree is an STP, and has as many children as the number of repeated actions it contains. Each arc in the tree connects a pair of endpoints in an STP (the starting and ending point of a repeated action) to the STP containing the constraints between its subactions, and is labeled with a list of properties describing the temporal constraints on the repetitions (granularity, grouping etc.). Temporal consistency checking proceeds in a top-down fashion, starting from the root node of the STP-tree. In fact, the root is a “standard”STP, so that Floyd-Warshall’s all-to-all shortest path standard algorithm can be applied to check its consistency, and to produce the minimal network of the constraints it contains (local minimal network henceforth). Thereafter, we proceed towards the leaves of the tree. For each node in the tree other than the root, we progress in three steps: (1) first, we check the consistency of the constraints used to specify the repetition taken in isolation; (2) second, we map the “extra” temporal constraints regarding the repetition onto bounds on difference constraints; (3) third, we apply the Floyd-Warshall algorithm to the constraints in the STP plus the “extra” bounds on difference constraints determined in the previous step. This also provides a local minimal network.
While the third step is trivial, the first two steps are performed by ad-hoc specialised algorithms [22]. Property 1. The top-down visit of the STP-tree is complete as regards consistency checking.
Besides checking the consistency of the temporal constraints, our approach also produces a tree of local minimal networks. This is exploited by another specialised algorithm in order to efficiently evaluate the minimum and maximum duration of a user-selected path starting from an action A1 and ending with an action A n, as required by the “what if” facility operating on the time parameter. The distance between A1 and A n is evaluated on the basis of the path on the STP-tree corresponding to the path selected by the user in the guideline, exploiting the local minimal networks in order to look for (1) the duration of a whole repetition and (2) the distance between the endpoint of the reference action (which is initially A1) and the end of one complete repetition (see [22] for
more details).
Figure 1: Part of the gallstone treatment guideline. The "what if" facility can be used to compare different paths.
5 COMPARISONS AND FUTURE WORK
In the latest years, many (semi-)automatic approaches dealing with clinical guidelines have been proposed: among them, we consider PROforma [12] and Asbru [4-5] to be the most similar to GLARE (see [16] for comparisons). Nevertheless, to the best of our knowledge, the literature describes no analoguous approach to our “what if” facility which supports medical decision-making on the basis of “global information” in the guideline. Moreover, from the temporal point of view, GLARE also offers a very expressive representation formalism (dealing with inexact temporal constraints and repeated events) as well as complete and tractable algorithms for temporal consistency checking and for implementing the “what if” facility in the temporal context.
In the short term, we plan to systematically test the temporal reasoning and “what-if” facilities described in sections 3 and 4 on practical clinical cases. A long-term goal will be further extension of the temporal formalism, while striving to maintain an appropriate balance between expressiveness and computational complexity.
REFERENCES
[1] J.M. Grimshaw, I.T. Russel, Effect of clinical guidelines on medical practice: a systematic review of rigorous evaluation. Lancet, 342-342, 1317-1322, 1993.
[2] G. Molino, From Clinical Guidelines to Decision Support, in: Proc. Joint European Conference on Artificial Intelligence in Medicine and Medical Decision Making, LNAI 1620, Aalborg, 3-12, 1999. [3] I. Purves, Computerised Guidelines in Primary Health Care: Reflections and Implications. in: C. Gordon and J.P. Christensen, eds., Health Telematics for Clinical Guidelines and Protocols, IOS Press, Amsterdam, 57-74, 1995.
[4] S. Miksch, Y. Shahar, and P. Johnson, Asbru: a task-specific, intention-based, and time-oriented language for representing skeletal plans, in: Proc. 7th Workshop on Knowledge Engeneering Methods and Languages, Milton Keynes, UK, 9-20, 1997.
[5] Y. Shahar, S. Mirksch, P. Johnson, The Asgaard Project: a Task-Specific Framework for the Application and Critiquing of Time-Oriented Clinical Guidelines, Artificial Intelligence in Medicine, 14, 29-51, 1998.
[6] M.A. Musen, S.W. Tu, A.K. Das, Y. Shahar, EON:
a component-based approach to automation of protocol-directed therapy, JAMIA, 3(6), 367-388, 1996.
[7] R.N. Shiffman, B.T. Karras, A. Agrawal, R. Chen, L. Menco, and S. Nath, GEM: a proposal for a more comprehensive guideline document model using XML, JAMIA, 7(5), 488-498, 2000.
[8] L. Ohno-Machado, J.H. Gennari, S. Murphy, N.L. Jain, S.W. Tu, D.E. Oliver, et al., The Guideline Interchange Format: A Model for Representing Guidelines, JAMIA, 5(4), 357-372, 1998.
[9] M. Peleg, A.A. Boxawala, et al., GLIF3: The evolution of a Guideline Representation Format, in: Proc. AMIA’00, 645-649, 2000.
[10] S. Quaglini, M. Stefanelli, A. Cavallini, G. Miceli, C. Fassino, and C. Mossa, Guideline-based careflow systems, Artificial Intelligence in Medicine, 20(1), 5-22, 2000.
[11] S.W. Tu, M.G. Kahn,M.G. Musen, J.K. Ferguson,
E.H. Shortliffe, and L.M. Fagan, Episodic Skeletal-plan Refinement on Temporal Data, Comm. ACM, 32, 1439-1455, 1989.
[12] J. Fox, N. Johns, A. Rahmanzadeh, R. Thomson, Disseminating medical knowledge: the PROforma approach, Artificial Intelligence in Medicine, 14, 157-181, 1998.
[13] M.A. Musen, C.W. Carlson, L.M. Fagan, S.C. Deresinski, E.H. Shortliffe, Automated Support for Community-Based Clinical Research, in: Proc. 16th Annual Symposium on Computer Applications in Medical Care, 719-723, 1992.
[14] C. Gordon and J.P. Christensen, Health Telematics for Clinical Guidelines and Protocols, IOS Press, 1995.
[15] Special Issue on Workflow Management and Clinical Guidelines, D.B. Fridsma (Guest ed.), JAMIA, 22(1), 1-80,2001.
[16] P. Terenziani, G. Molino, and M. Torchio, A Modular Approach for Representing and Executing Clinical Guidelines, Artificial Intelligence in Medicine, 23, 249-276, 2001.
[17] P. Terenziani, F. Mastromonaco, G. Molino, M. Torchio, Executing clinical guidelines: temporal issues, Proc. AMIA’00, 848-852, 2000.
[18] R. Dechter, I. Meiri, and J. Pearl, Temporal Constraint Networks, Artificial Intelligence, 49, 61-95, 1991.
[19] L. Vila, A Survey on Temporal Reasoning in Artificial Intelligence, AI Comm. 7(1), 4-28, 1994. [20] L. Console, P. Terenziani, Efficient processing of queries and assertions about qualitative and quantitative temporal constraints, Computational Intelligence 15(4), 442-465, 1999.
[21] I. Meiri, Combining Qualitative and Quantitative Constraints in Temporal Reasoning, Proc. AAAI, 260-267, 1991.
[22] P.Terenziani, C. Carlini, S. Montani, Towards a Comprehensive Treatment of Temporal Constraints in Clinical Guidelines, submitted to TIME02.
电子数据取证办案速查手册
电子数据取证办案速查手册 第一章速查手册概述 计算机取证是一门发展非常迅速的学科,时代需要一批能不断吸收最新的知识,掌握最新的技能,使用最新的工具,不断提高自身素质的网络精英,来应对同样在飞速进步的高科技犯罪分子。为电子数据取证与勘察过程中提供一本速查手册,协助办案人员快速查询一些细节性的易遗忘的知识点,这是这本手册设计的初衷。 第二章计算机犯罪现场勘察指南 一:保护现场 现场保护的目的是防止犯罪嫌疑人、调查人员和操作系统故意或无意破坏现场的证据。 在保护现场时需要依循以下原则: 1 禁止嫌疑人接触数字化设备 现场勘查过程中要禁止任何非司法人员接触计算机、电源、网络设备和数字化证据存储设备。必要情况下可以向在场人员索取登录计算机的口令、手机和PDA 的解锁口令、应用程序的功能等相关信息,但必须禁止嫌疑人直接操作计算机。 如果所勘查的现场是公共上网场所(如网吧),必须尽量根据预先掌握的情况(如嫌疑人的体貌特征、当前登录的帐号
等)和技术手段确定嫌疑人身份,并采用隐蔽的方式控制嫌疑人。除非案件特别重大或特别紧急,否则不得采用公开的方式控制犯罪嫌疑人。 2 防止嫌疑人采用隐蔽手段故意破坏证据 嫌疑人可能通过网络、拨入设备远程控制计算机或者网络,在紧急情况下,可以切断相关的有线网络和无线网络连接(关闭交换机、HUB 或无线接入设备)和拨入设备(关闭MODEM)。 嫌疑人可能通过切断电源的方式破坏数据,在现场勘查时要将嫌疑人控制在不可能接触任何电源开关的区域。 嫌疑人可能在系统上安装专门的程序,在满足特定条件下该程序自动清除相关证据。在现场勘查时要评估嫌疑人是否可能具备这一技术水平,如果这种可能性较大,要立即关闭计算机电源。在现场勘查中不应听从嫌疑人的建议实施操作,因为嫌疑人提供的操作方法有可能会导致证据损毁。 3 防止调查人员无意中破坏证据 如果电子设备(包括计算机、PDA 、移动电话、打印机、传真设备等)已经打开,不要立即关闭该电子设备。如果电子设备已经关闭,不要打开该电子设备。 计算机在长期不使用的情况下,显示器可能处在节电模式(黑屏状态),或者用户可能临时关闭显示器,而计算机确正在运行之中。在现场勘查时要观察显示器电源是否打开,
(完整版)电子数据取证标准
电子数据取证标准 随着全球信息化的飞速发展,越来越多的数据以电子形式保存。信息安全产品、信息安全服务、安全事件处理与应急响应等方面都离不开电子证据;此外,在商务交易、政府服务、交流沟通、网络娱乐等各种网络应用中也大量涉及到电子证据。但是如同潘多拉的魔盒, 商务类应用的快速发展也伴随着互联网违法犯罪不断增长。有数据显示2013年中国网民在互联网上损失近1500亿,截止2013年12月,我国网民规模达到6.18亿,这就意味着2014年中国网民每人平均损失达243元。 电子数据取证技术,是信息安全领域的一个全新分支,逐渐受到人们的重视,它不仅是法学在计算机科学中的有效应用,而且是对现有网络安全体系的有力补充。近年来,我国的民事诉讼法、刑事诉讼法和行政诉讼法陆续将电子数据确立为法定证据种类之一,电子证据已在我国民事诉讼、刑事诉讼和行政诉讼法活动中发挥重要作用。 电子数据取证是一个严谨的过程,因为它需要符合法律诉讼的要求。因此,取证调查机构必须从“人、机、料、法、环”等多个方面规范电子数据取证工作。 我国电子证据的标准化工作起步较晚,但是国家对于相关标准工作十分重视。《全国人大常委会关于司法鉴定管理问题的决定》(以下简称《决定》)从国家基本法律层面对电子数据鉴定遵守技术标准的义务做了明确规定,即“鉴定人和鉴定机构从事司法鉴定业务,应当遵守法律、法规,遵守职业道德和职业纪律,尊重科学,遵守技术操作规范。” 部门规章和规范性文件层面也有类似规定。2005年《公安机关电子数据鉴定规则》(公 信安[2005]281号)明确要求公安机关电子数据鉴定人应当履行并遵守行业标准和检验鉴定 规程规定的义务;2006年《公安机关鉴定机构登记管理办法》(公安部令第83号)明确 将鉴定机构遵守技术标准的情况纳入公安登记管理部门年度考核的内容中;2007年《司法 鉴定程序通则》(司法部令第107号)对鉴定人采纳技术标准问题做出了详细的要求,其 第22条规定,“司法鉴定人进行鉴定,应当依下列顺序遵守和采用该专业领域的技术标准 和技术规范:(一)国家标准和技术规范;(二)司法鉴定主管部门、司法鉴定行业组织或者相关行业主管部门制定的行业标准和技术规范;(三)该专业领域多数专家认可的技术标 准和技术规范…..”
液压泵齿轮泵的工作原理
液压泵齿轮泵的工作原理: 1.齿轮泵是依靠泵缸与啮合齿轮间所形成的工作容积变化和移动来输送液体或使之增压的回转泵。 外啮合双齿轮泵的结构。一对相互啮合的齿轮和泵缸把吸入腔和排出腔隔开。齿轮转动时,吸入腔侧轮齿相互脱开处的齿间容积逐渐增大,压力降低,液体在压差作用下进入齿间。随着齿轮的转动,一个个齿间的液体被带至排出腔。这时排出腔侧轮齿啮合处的齿间容积逐渐缩小,而将液体排出。齿轮泵适用于输送不含固体颗粒、无腐蚀性、粘度范围较大的润滑性液体。 泵的流量可至300米3/时,压力可达3×107帕。它通常用作液压泵和输送各类油品。齿轮泵结构简单紧凑,制造容易,维护方便,有自吸能力,但流量、压力脉动较大且噪声大。齿轮泵必须配带安全阀,以防止由于某种原因如排出管堵塞使泵的出口压力超过容许值而损坏泵或原动机。 高真空齿轮泵工作原理:高真空齿轮泵依靠主从动齿轮的相互啮合把泵体分成吸油腔和压油腔。吸油腔由于相互啮合的轮齿逐渐脱开,密封工作容积逐渐增大,形成部分真空,因此油箱中的油液在外界大气压力的作用下,经吸油管进入吸油腔,将齿间槽充满,并随着齿轮旋转,把油液带到左侧压油腔内。在压油区一侧,由于轮齿在这里逐渐进入啮合,密封工作腔容积不断减小,油液便被挤出去,从压油腔输送到压力管路中去。 电动机运转时,推进装置随着主轴一起高速运转本推进装置相似于一轴流泵,其排空(抽真空)的速率远远大于齿轮啮合排空的速率,随着推进装置的推进作用,齿轮啮合的反泄露被阻滞,其形成的极限真空自然得到了大大的提高,处于较低位置的油液则被迅速吸入泵腔内,然后经排油腔被压入出口排出。 当油路中的阻力(压力)超过所设定的安全压力时,安全阀就启动,使排油腔的油回到吸油腔,从而保持压力不再上升,安全阀起过载保护作用 外齿轮泵有两根相同尺寸的啮合齿轮轴。驱动轴连接电机或减速机(通过弹性联轴器)并带动另一根轴。在重载型工业齿轮泵内,齿轮通常与轴为整体(一个部件),轴颈的公差很小。外齿轮泵的运行原理很简单。液体进入泵吸入端,被未啮合的齿间空穴吸入,然后在齿间空穴内被带动,沿齿轮轴外缘到达出口端。重新啮合的齿将液体推出空穴进入背压处。有三种常用的齿轮形式:直齿、斜齿和人字齿。这三种形式各有利弊,CB—B齿轮泵的结构,有不同的应用。直齿是最简单的形式,在高压工况下为最优应用,因为没有轴向推力,且输送效率较高。斜齿在输送过程中的脉动最小,且在较高速度运行时更加安静,不锈钢保温泵,因为齿的啮合是渐进式的。但是,由于轴向推力的作用,轴承材质的选用可能会造成进出口压差有限、处理粘度较低。因为轴向力会将齿轮推向轴承端面而摩擦,所以只有选用硬度较高的轴承材质或在其端面作特殊设计,才能应对这种轴向推力。为使齿轮泵的承压能力最大化,这些配合部件之间的间隙必须愈小愈好以
电子取证技术的三大方向
电子取证技术的三大方向 计算机取证是对计算机犯罪证据的识别获取、传输、保存、分析和提交认证过程,实质是一个详细扫描计算机系统以及重建入侵事件的过程。 国内外计算机取证应用发展概况 现在美国至少有70%的法律部门拥有自己的计算机取证实验室,取证专家在实验室内分析从犯罪现场获取的计算机(和外设),并试图找出入侵行为。 在国内,公安部门打击计算机犯罪案件是近几年的事,有关计算机取证方面的研究和实践才刚起步。中科院主攻取证机的开发,浙江大学和复旦大学在研究取证技术、吉林大学在网络逆向追踪,电子科技大学在网络诱骗、北京航空航天大学在入侵诱骗模型等方面展开了研究工作。但还没有看到相关的阶段性成果报道。 计算机取证的局限性以及面临的问题 (1)目前开发的取证软件的功能主要集中在磁盘分析上,如磁盘映像拷贝,被删除数据恢复和查找等工具软件开发研制。其它取证工作依赖于取证专家人工进行,也造成了计算机取证等同于磁盘分析软件的错觉。 (2)现在计算机取证是一个新的研究领域,许多组织、公司都投入了大量人力进行研究。但没有统一标准和规范,软件的使用者很难对这些工具的有效性和可靠性进行比较。也没有任何机构对计算机取证和工作人员进行认证,使得取证权威性受到质疑。 计算机取证发展研究 计算机取证技术随着黑客技术提高而不断发展,为确保取证所需的有效法律证据,根据目前网络入侵和攻击手段以及未来黑客技术的发展趋势,以及计算机取证研究工作的不断深入和改善,计算机取证将向智能化、专业化和自动化方向发展 计算机取证的相关技术发展 从计算机取证的过程看,对于电子证据的识别获取可以加强动态取证技术研究,将计算机取证结合到入侵检测、防火墙、网络侦听等网络安全产品中进行动态取证技术研究;对于系统日志可采用第三方日志或对日志进行加密技术研究;对于电子证据的分析,是从海量数据中获取与计算机犯罪有关证据,需进行相关性分析技术研究,需要高效率的搜索算法、完整性检测算法优化、数据挖掘算法以及优化等方面的研究。 对入侵者要进行计算机犯罪取证学的入侵追踪技术研究,目前有基于主机追踪方法的Caller ID,基于网络追踪方法的IDIP、SWT产品。有学者针对网络层的追踪问题,提出基于聚类的流量压缩算法,研究基于概率的追踪算法优化研究,对于应用层根据信息论和编码理论,提出采用数字水印和对象标记的追踪算法和实现技术,很有借鉴意义。在调查被加密的可执行文件时,需要在计算机取证中针对入侵行为展开解密技术研究。 计算机取证的另一个迫切技术问题就是对取证模型的研究和实现,当前应该开始着手分析网络取证的详细需求,建立犯罪行为案例、入侵行为案例和电子证据特征的取证知识库,有学者提出采用XML和OEM数据模型、数据融合技术、取证知识库、专家推理机制和挖掘引擎的取证计算模型,并开始着手研究对此模型的评价机制。 计算机取证的标准化研究 计算机取证工具应用,公安执法机关还缺乏有效的工具,仅只利用国外一些常用的取证工具或者自身技术经验开发应用,在程序上还缺乏一套计算机取证的流程,提出的证据很容易遭到质疑。对计算机取证应该制定相关法律、技术标准,制度以及取证原则、流程、方法等,到目前为止,还没有专门的机构对计算机
液压泵的工作原理及主要结构特点
液压泵的工作原理及主要结构特点 外啮合齿轮泵由于轮齿脱开使容积逐渐增大,形成真空从油箱吸油,随着齿轮的旋转充满在齿槽内的油被带到 在 容积逐渐减小,把液压油排出 内 啮合齿轮泵转时,与此相啮合的内齿轮也随着旋转。吸油腔由于轮齿脱开而吸油,经隔板后,油液进入压油腔,压油腔由于轮齿啮合而排油
叶片泵心力和压力油的作用下,尖部紧贴在定子内表面上。这样两个叶片与转子和定子内表面所构成的工作容积,先由小到大吸油后再由大到小排油,叶片旋转一周时,完成两次吸油和两次排油 柱塞泵成,柱塞在缸体内作往复运动,在工作容积增大时吸油,工作容积减小时排油。采用端面配油 螺杆泵动螺杆相互啮合,三根螺杆的啮合线把螺旋槽分割成若干个密封容积。当螺杆旋转时,这个密封容积
液压泵工作原理及叶片泵 支红俊 授课时间:2学时 授课方法:启发式教学 授课对象:职高学生 重点、难点:泵和叶片泵的工作原理、叶片泵的符号 液压泵 引入: 问:人与液压传动有无紧密的联系。学生活动 归纳:24小时伴随人的活动。人的心血管系统是精致的液 压传动系统。 问:血液为什么能周而复始、川流不息地在全身流动?学 生活动 归纳:依靠人的心脏。二尖瓣 问:心脏是如何工作的?学生活动 归纳:如图所示: 当心脏舒张时左边的二尖瓣打开,右边的二尖瓣关闭,产生吸血。当心脏收缩时,左边的二尖瓣关闭,右边的二尖瓣打开,产生压血。 问:心脏工作的必备条件有哪些。 归纳:三条:1、内腔是一密闭容积;2、密闭容积能交替变化;3、有配血器官(二尖瓣)。 一、液压泵的工作原理 如图所示: 介绍结构及组成。 提问:找出液压泵与心脏工作 原理的共同点。学生活动 归纳:1、柱塞与缸形成密封容积; 2 3、单向阀起到配流作用。 提问:有什么不同点。学生活动 归纳:当密封容积增大时,产生部分真空,在大气压的作用下产生吸油。 举例说明:如图所示: 将鸡蛋放到与其大小差不多杯口上,鸡蛋 放不进去,若将燃烧的纸先放到水杯里,接着 将鸡蛋放到瓶口上,鸡蛋在大气压的作用下迅速进入 水杯里。水杯
企业内部调查之电子取证
课程背景 伴随着电脑和网络技术的迅猛发展,办公自动化及无纸化办公的发展,在越来越多的企业争议案件中,当事人提供电子邮件、网络聊天记录、视频资料等电子数据作为证据,甚至于在某些案件中,最重要和最关键的证据就电子证据。因此电子证据的效力能否被认定就成为了决定案件胜败的关键。 你知道如何从windows系统中取证内容吗? 哪些应用程序的数据可以擦亮您的慧眼? 网络实时通信记录数据如何抓取?…… 80%以上的企业,面对突如其来的企业纠纷(劳动,白领犯罪,贿赂)败诉,归咎于疏忽事前的准备! 课程大纲 一、电子证据概述 1、证据概念 概念/广义/狭义 证明力 证据能力 2、证据的特征(案例) 客观性/关联性/合法性 3、电子证据的立法状况 国外情况 VS 我国情况 4、电子证据立法内容前瞻 5、电子证据概念及特征 电子证据的定义 电子形式存在的数据(包括其派生物) 借助信息技术或信息设备形成的数据 作为证据使用的数据
二、电子证据来源 1、存储介质中(硬盘、U盘、光盘) 2、电磁辐射中(案例) 3、传输线路中 三、电子证据收集 1、电子证据收集概念 2、电子证据收集的范围(案例) 3、Win系统取证内容 Windows系统数据作为电子证据调取(案例) 在线调查部 获取系统日志 查看注册表 获取文件修改和创建时间 获得系统密码 系统复制和数据备份 离线调查部分 建立离线分析环境|检查所有相关日志 进行关键字搜索|检查可疑文件 (包括电子邮件、删除文件、注册表文件、浏览器、隐藏文件等) 应用程序数据作为电子证据 电子邮件数据 即时通信软件数据 电子公告数据 网络浏览下的电子证据 IE浏览器 浏览历史 缓存,加速浏览速度而保存在本地缓存的文件 Cookies,会话型和永久型,用于识别访问过的网址 收藏夹 网络实时通信取证介绍 Tcpdump 事件监视 无内容通信监视 全内容监视:数据收集-事件提取-会话重组 4、电子证据收集规则 严格依法进行 突出电子证据的特点 5、电子证据的收集方法
电子证据新技术培训心得体会范文_心得体会.doc
2015年电子证据新技术培训心得体会范文_ 心得体会 7月13日至7月17日,我有幸在济南山东省检察官培训学院参加了省院组织的证据培训。培训时间虽只有短短的一周,但却让我受益匪浅,收获颇丰。培训内容包括电子现场勘验、网络及数据保全、数据恢复及密码破解、MAC取证分析技术、缺陷存储在检察办案中的应用、手机芯片取证技术和物理、逻辑取证新方法、话单分析及定位技术、取证规范及文书制作、云计算和大数据等相关内容。授课老师既有省院专家领导又有各市级院的业务能手和电子数据取证专业的专家,他们结合自身以及常见案例进行授课,给我们呈现了一节又一节的饕餮盛宴。内容翔实、形式新颖的课程,让我们这些初次接触电子证据的小白们眼前一亮、豁然开朗。这次培训对我今后正确履行岗位职责,做好检察技术工作给予了很大帮助,同时也为我今后从事电子数据取证工作打下坚实的基础。短短一周的让我有了许多切身的体会。 一、找准定位,发挥自己专业 此次培训让我深刻了解到电子数据取证需要强大的专业知识背景,尤其要求通信工程专业及计算机硬件专业知识,同时对于手机的Adroid、IOS系统等都需要有强大的专业知识与实践能力。作为计算机专业出身的我来说,虽然学习了7年的计算机知识,但是这方面专业能力还远远不够,学校以及实习期间一直从事软件测试、ERP等方面的工作,对于电子数据所要求的通信工程、单片机以及计算机硬件等专业知识的欠缺让我倍感压力。但
是有句话说的好,压力就是动力、学习是前进的源泉。因此在感到压力的同时,要不断的学习,向领导学习,向同事学习,向其他兄弟院有经验的同志们学习。 二、勇于实践,敢于探索,运用电子取证设备为检察工作增砖添瓦。 纵使思忖千百度,不如躬身下地锄。培训期间,淄博院的曹茂虹和济宁市院的周广春两名同志结合自身经历以及工作经验所讲解的电子数据取证常见案例,我初步了解了话单分析、伪基站检验鉴定等相关领域以及电子证据取证流程等内容,深受启发,同时也让我坚定了在以后的工作中要不断的自我充电,多多学习,并勇于实践,只有不断地学习和实践才能将工作做的更好。此次培训期间印象深刻的还有专家讲解的WiHex的使用,通过WiHex软件结合计算机本身分区的相关知识可以快速解决诸如U盘打不开,文件打开出现乱码等问题,让我受益匪浅,同时也让我深感计算机专业的博大精深以及我对计算机专业某些方面知识的匮乏。因此在以后的工作中要勇于实践,敢于探索,在探索和实践中增加自己的知识,在电子取证方面有所建树。 三、善于交流,不断丰富自己 此次培训,让我了解到高检院以及其他兄弟院在电子取证方面的成就。省院领导讲解的云计算与大数据的简介让我了解了什么是云计算和大数据,以及云计算和大数据对我们以后的电子数据取证方面的作用。与省院领导、兄弟院业务能手的交流,我了解了电子取证的发展趋势以及前景,在取证过程中进行数据恢复的技巧等。同时也了解到高检院的电子证据取证云平台在试运行,为以后大家进行电子数据方面的交流学习提供了便捷。 天生我材必有用。随着电子信息技术的不断发展,电子
液压泵的工作原理及主要结构特点
液压泵的工作原理及主要结构特点
液压泵工作原理及叶片泵 支红俊 授课时间:2学时
授课方法:启发式教学 授课对象:职高学生 重点、难点:泵和叶片泵的工作原理、叶片泵的符号 液压泵 引入: 问:人与液压传动有无紧密的联系。学生活动 归纳:24小时伴随人的活动。人的心血管系统是精致的液 压传动系统。 问:血液为什么能周而复始、川流不息地在全身流动?学 生活动 归纳:依靠人的心脏。二尖瓣问:心脏是如何工作的?学生活动 归纳:如图所示: 全靠心脏节律性的搏动,通过舒张和收缩来推动血液流动。 当心脏舒张时左边的二尖瓣打开,右边的二尖瓣关闭,产生吸血。 当心脏收缩时,左边的二尖瓣关闭,右边的二尖瓣打开,产生压 血。 问:心脏工作的必备条件有哪些。 归纳:三条:1、内腔是一密闭容积;2、密闭容积能交替变 化;3、有配血器官(二尖瓣)。 一、液压泵的工作原理 如图所示:
介绍结构及组成。 提问:找出液压泵与心脏工作柱塞 原理的共同点。学生活动单向阀归纳:1、柱塞与缸形成密封容积; 2、当偏心轮旋转时,密闭容积可以交替变化; 3、单向阀起到配流作用。 提问:有什么不同点。学生活动 归纳:当密封容积增大时,产生部分真空,在大气压的作用 下产生吸油。 举例说明:如图所示: 将鸡蛋放到与其大小差不多杯口上,鸡蛋鸡蛋放不进去,若将燃烧的纸先放到水杯里,接着 水杯里。水杯 问:液压泵的工作的条件有哪些。学生活动 归纳:1、应具备密封容积且交替变化。 2、应有配油装置。 3、吸油过程中油箱必须与大气相通。 一、叶片泵 可分为:单作用和双作用叶片泵。 1、单作用叶片泵 (1)结构和工作原理。
电子数据取证在侦查中的应用
电子数据取证在侦查中的应用 二、电子数据取证的现状电子数据取证与侦查结合的程度和效果如何,取决于技术与侦查协作机制是否完善。在现阶段,检察机关的技术部门与侦查部门结合远不如公安机关技侦部门与侦查的协作,这与检察机关的工作性质有关,也与检察业务的特点有关。检察业务主要是法律监督,包括侦查职能也是为履行法律监督职能而设,技术部门的主要业务之一主要是对案件中的技术性证据进行审查监督,而其他的鉴定和技术协助等也都没有与侦查密切衔接,这是由于刑诉法没有赋予检察机关使用技术侦查手段,侦查部门对技侦手段的使用不通过技术部门,所以在工作实践中,有了需要技术部门提供协助的时侯,也往往想不起来向技术部门提出。两个部门各自有自己的工作方法和方式,如果不是同一个主管检察长管理,两者之间配合有着非常大的障碍。技术部门经费紧张,在配合办案时,牵涉到经费问题都无从解决,如果侦查部门不能提供帮助,技术人员就难以融入办案组正常开展工作。侦查工作有非常强的时效性,需要技术支持及时有效,而技术部门承担的工作比较繁多,人员又少,有时不能及时提供所需数据,或者不能判明哪个案件或情况更需要优先支持,造成侦查部门感到用技术部门不方便。再有其他方面根深蒂固的成见,侦技协作机制就成了好说不好做的一
句空话。但是,只要领导支持,建立坚强有效的制度制约,还是能够推行这一机制的,现实中也确有一批侦技协作非常成功的实践者,技术为侦查提供帮助,助推侦查业务腾飞;侦查为技术提供发展的条件,技术有了好的工作条件,从而为侦查提供更好的服务,形成了良性互动。 三、检察机关工作中电子数据取证的应用电子数据取证是检察机关的“技术侦查”,电子数据是存在于嫌疑人所使用或接触的电子设备中,它存在于一个完全不可见而又客观存在的虚拟世界中,比如这样一个案例,一个行贿人甲为了获取非法利益,他想通过向掌握权力的乙行贿的方法以达目的,首先甲要通过电话联系乙,这就产生了通话记录和短信记录等电子数据,其次,他要约见甲,共赴一个地点,通过两者的车辆的GPS或手机基站信息,可以通过两者的位置信息为见面提供佐证,这里的GPS信息和手机基站话单也是电子数据,见面谈话时,乙为保证自己的目的能够有保障的达到,他很有可能对谈话内容进行录音,这个录音文件也是电子数据,而公安的天网监控系统的录像资料也是证明这个过程的辅助材料,这些电子记录的录像资料也是电子数据,甲与乙如果经常干这样的勾当,他们也很可能会对这些非法交易进行记账,在现今科技高度发达的时代,记账一般都以电子方式进行,这些电子账本也是电子数据。最后,他们对各自银行账户的操作,依然留下存取的记录,这个银行计算机系统
齿轮油泵工作原理和注意事项
齿轮油泵工作原理和注意事项 2009-12-25 0:49:00 发布者:泊头八方油泵制造厂 齿轮油泵是通过一对参数和结构相同的渐开线齿轮的相互滚动啮合,将油箱内的低压油升至能做功的高压油的重要部件。是把发动机的机械能转换成液压能的动力装置。发动机在其使用过程中容易出现以下故障。 1、油泵内部零件磨损 油泵内部零件磨损会造成内漏。其中浮动轴套与齿轮端面之间泄漏面积大,是造成内漏的主要部位。这部分漏损量占全部内漏的50%~70%左右。磨损内漏的齿轮泵其容积效率下降,油泵输出功率大大低于输入功率。其损耗全部转变为热能,因此会引起油泵过热。若将结合平面压紧,因工作时浮动轴套会有少量运动而造成磨损,结果使农具提升缓慢或不能提升,这样的浮动轴套必须更换或修理。 2、油泵壳体的磨损 主要是浮动轴套孔的磨损(齿轮轴与轴套的正常间隙是0.09~0.175mm,最大不得超过0.20mm)。齿轮工作受压力油的作用,齿轮尖部靠近油泵壳体,磨损泵体的低压腔部分。另一种磨损是壳体内工作面成圆周似的磨损,这种磨损主要是添加的油液不净所致,所以必须添加没有杂质的油液。 3、油封磨损,胶封老化 卸荷片的橡胶油封老化变质,失去弹性,对高压油腔和低压油腔失去了密封隔离作用,会产生高压油腔的油压往低压油腔,称为“内漏”,它降低了油泵的工作压力和流量。CB46齿轮泵它的正常工作压力为100~110kg/平方厘米,正常输油量是46
L/min,标准的卸荷片橡胶油封是57×43。自紧油封是PG25×42×10的骨架式油封,它的损坏或年久失效,空气便从油封与主轴轴颈之间的缝隙或从进油口接盘与油泵壳体结合处被吸入油泵,经回油管进入油箱,在油箱中产生大量气泡。会造成油箱中的油液减少,发动机油底槽中油液增多现象,使农具提升缓慢或不能提升。必须更换油封才可排除此故障。 4、机油泵供油量不足或无油压 现象:工作装置提升缓慢,提升时发抖或不能提升;油箱或油管内有气泡;提升时液压系统发出“唧、唧”声音;拖拉机刚启动时工作装置能提升,工作一段时间油温升高后,则提升缓慢或不能提升;轻负荷时能提升,重负荷时不能提升。 故障原因: (1)液压油箱油面过低; (2)没按季节使用液压油; (3)进油管被脏物严重堵塞; (4)油泵主动齿轮油封损坏,空气进入液压系统; (5)油泵进、出油口接头或弯接头“O”形密封圈损坏,弯接头的紧固螺栓或进、出油管螺母未上紧,空气进入液压系统; (6)油泵内漏,密封圈老化; (7)油泵端面或主、从动齿轮轴套端面磨损或刮伤,两轴套端面不平度超差; (8)油泵内部零件装配错误造成内漏; (9)“左旋”装“右旋”油泵,造成冲坏骨架油封;
液压机机工作原理
编辑本段(一)组成 四柱液压机由主机及控制机构两大部分组成。液压机主机部分包括液压缸、横梁、立柱及充液装置等。动力机构由油箱、高压泵、控制系统、电动机、压力阀、方向阀等组成。[1] (二)用途 该液压机适用于可塑性材料的压制工艺。如粉末制品成型、塑 料制品成型、冷(热)挤压金属成型、薄板拉伸以及横压、弯压、翻透、校正等工艺。 四柱液压机具有独立的动力机构和电器系统,采用按钮集中控制,可实现调整、手动及半自动三种操作方式。 (三)特点 机器具有独立的动力机构和电气系统,采用按钮集中控制,可实现调整、手动及半自动三种工作方式:机器的工作压力、压制速度,空载快下行和减速的行程和范围,均可根据工艺需要进行调整,并能完成顶出工艺,可带顶出工艺、拉伸工艺三种工艺方式,每种工艺又为定压,定程两种工艺动作供选择,定压成型工艺在压制后具有顶出延时及自动回程。 液压机简介 (又名:油压机)利用帕斯卡定律制成的利用液体压强传动的机械,种类很多。当然,用途也根据需要是多种多样的。如按传递压强的液体种类来分,有油压机和水压机两大类。水压机机产生的总压力较大,常用于锻造和冲压。锻造水压机又分为模锻水压机和自由锻水压机两种。模锻水压机
要用模具,而自由锻水压机不用模具。我国制造的第一台万吨水压机就是自由锻造水压机。 工作原理 四柱液压机[2]的液压传动系统由动力机构、控制机构、执行机构、辅助机构和工作介质组成。动力机构通常采用油泵作为动力机构,一般为积式油泵。为了满足执行机构运动速度的要求,选用一个油泵或多个油泵。低压(油压小于2.5MP)用齿轮泵;中压(油压小于6.3MP)用叶片泵;高压(油压小于32.0MP)用柱塞泵。各种可塑性材料的压力加工和成形,如不锈钢板钢板的挤压、弯曲、拉伸及金属零件的冷压成形,同时亦可用于粉末制品、砂轮、胶木、树脂热固性制品的压制。 安全操作 1、液压机操作者必须经过培训,掌握设备性能和操作技术后,才能独立作业。 2、作业前,应先清理模具上的各种杂物,擦净液压机杆上任何污物。 3、液压机安装模具必须在断电情况下进行,禁止碰撞启动按钮、手柄和用脚踏在脚踏开关上。 4、装好上下模具对中,调整好模具间隙,不允许单边偏离中心,确认固定好后模具再试压。 5、液压机工作前首先启动设备空转5分钟,同时检查油箱油位是否足够、油泵声响是否正常、液压单元及管道、接头、活塞是否有泄露现象。深圳油压机 TM系列引 6、开动设备试压,检查压力是否达到工作压力,设备动作是否正常可靠,有无泄露现象。 7、调整工作压力,但不应超过设备额定压力的90%,试压一件工件,检验合格后再生产。 8、对于不同的液压机型材及工件,压装、校正时,应随时调整压机的工作压力和施压、保压次数与时间,并保证不损坏模具和工件。 9、机体压板上下滑动时,严禁将手和头部伸进压板、模具工作部位。 10、严禁在施压同时,对工作进行敲击、拉伸、焊割、压弯、扭曲等作业。 11、液压机压机周边不得抽烟、焊割、动火,不得存放易燃、易爆物品。做好防火措施。 12、液压机工作完毕,应切断电源、将压机液压杆擦试干净,加好润滑油,将模具、工件清理干净,摆放整齐 维护保养
电子取证技术
电子邮件取证是计算机取证的一个分支,是指按照法律的要求提取电子邮件证据的方法和过程,是运用技术的手段识别一个电子邮件真正的发送者、接收者以及邮件发送的时间和发出地址的过程。 什么是电子取证技术 电子邮件取证是计算机取证的一个分支,是指按照法律的要求提取电子邮件证据的方法和过程,是运用技术的手段识别一个电子邮件真正的发送者、接收者以及邮件发送的时间和发出地址的过程。 假定一个电子邮件的接收者是https://www.360docs.net/doc/912067797.html,公司,该邮件的头部显示在接收者和发送者之间有四个节点。其中第三和第四个在系统内,是https://www.360docs.net/doc/912067797.html,公司内部的电子邮件系统,并且可能在https://www.360docs.net/doc/912067797.html,公司内部的电子邮件日志中有记录。如果不知道其它的两个节点的服务器,可以通过Whois 和Better-Whois进行查询。这两个服务程序搜索包含注册用户名和IP 地址的数据库,例如通过使用Whois搜索https://www.360docs.net/doc/912067797.html, 这个域名时,可以得到该域名所有者的名字、地址、联系方式,以及负责解析该域名的域名服务器等信息。 如果发送者的地址不是伪造的话,就可以很容易地找到邮件的发送者,因为只需找到在邮件发送时谁在使用邮件服务器就可以了,这通常可以在邮件服务器的日志中找到。 电子邮件取证追踪所面临的困境从上面看,似乎电子邮件的取证追踪非常简单,然而实际情况通常并非如此。因为Whois 和Better-Whois虽然有助于找到电子邮件的发送者,但它们却无法确定该发送者的地址是否是伪造的。目前的电子邮件服务器在发送邮件时通常是没有认证的,也就是说用户可以在无需密 码的情况下使用他人的电子邮箱发送信件,所以在大多数情况下,虽然可以找到邮件发送者的账号,但却不能因此就断定邮件就是由该账号的用户所发送的,这就是电子邮件取证追踪所面临的困境,此时通常还要使用其它方面的证据才能断定。 电子邮件的取证追踪发送者的难题
液压泵工作原理及控制方式
现在的挖掘机多为斜盘式变量双液压泵,所谓变量泵就是泵的排量可以改变,它是通过改变斜盘的摆角来改变柱塞的行程从而实现泵排出油液容积的变化。变量泵的优点是在调节范围之内,可以充分利用发动机的功率,达到高效节能的效果,但其结构和制造工艺复杂,成本高,安装调试比较负责。按照变量方式可分为手动变量、电子油流变量、负压油流变量、压力补偿变量、恒压变量、液压变量等多种方式。现在的挖掘机多采用川崎交叉恒功率调节系统,多为反向流控制,功率控制,工作模式控制(电磁比例减压阀控制)这三种控制方式复合控制。
调节器代码对应的调节方式
调节器内部结构 各种控制都是通过调节伺服活塞来控制斜盘角度,达到调节液压泵流量的效果。
大家知道在压强相等的情况下,受力面积的受到的作用力就大。 调节器就是运用这一原理,通过控制伺服活塞的大小头与液压泵出油口的联通关闭来控制伺服活塞的行程。在伺服活塞大小头腔都有限位螺丝,所以通过调节限位螺丝可以调节伺服活塞最大或最小行程,达到调节液压泵的最大流量或者最小流量的效果。
向内调整限制伺服活塞最大和最小行程及限制最大流量和最小流量 要谈谈反向流控制,就必须要弄明白反向流是如何产生的。在主控阀中有一条中心油道,当主控阀各阀芯处于中位时(及手柄无操作时)或者阀芯微动时(及手柄微操作时)液压泵的液压油通过中心油道到达主控阀底部溢流阀,经过底部溢流阀的增压产生方向流(注当
发动机启动后无动作时液压回路是直通油箱,液压系统无压力)。 所以方向流控制的功能是减少操作控制阀在中位时,泵的流量,使泵流量随司机操作所属流量变化,改善调速性能,避免了无用能耗。
液压泵的工作原理及主要结构特点(20201002103456)
液压泵的工作原理及主要结构特点 结构、原理示意图工作原理结构特点 当齿轮旋转时,在A腔, 由于轮齿脱开使容积逐渐 利用齿和泵壳形成的封 增大,形成真空从油箱吸 闭容积的变化,完成泵的功 油,随着齿轮的旋转充满 能,不需要配流装置,不能 在齿槽内的油被带到B腔,I 变量结构最简单、价格低、 在B腔,由于轮齿啮合, 径向载荷大 容积逐渐减小,把液压油排出 典型的内啮合齿轮泵主 当传动轴带动外齿轮 要有内齿轮、外齿轮及隔板 旋转时,与此相啮合的内 等组成利用齿和齿圈形成 齿轮也随着旋转。吸油腔 的容积变化,完成泵的功 由于轮齿脱开而吸油,经 能。在轴对称位置上布置有 隔板后,油液进入压油腔, 吸、排油口。不能变量尺寸 压油腔由于轮齿啮合而排 比外啮合式略小,价格比外啮 合式略高,径向载荷大 转子旋转时,叶片在离利用插入转子槽内的叶 片心力和压力油的作用下,片间容积变化,完成泵的作
泵 尖部紧贴在定子内表面 用。在轴对称位置上布置有 作容积,先由小到大吸油 后再由大到小排油,叶片 旋转一周时,完成两次吸 油和两次排油 一根主动螺杆与两根 从动螺杆相互啮合,三根 利用螺杆槽内容积的移 螺杆的啮合线把螺旋槽分 动,产生泵的作用不能变量 割成若干个密封容积。当 无流量脉动径向载荷较双 螺杆旋转时,这个密封容 螺杆式小、尺寸大,质量大 积沿轴向移动而实现吸油 和排油 上。这样两个叶片与转子 两组吸油口和排油口径向 和定子内表面所构成的工 载荷小,噪声较低流量脉动 径向载荷由缸体外周的 大轴承所平衡,以限制缸体 的倾斜利用配流盘配流传 动轴只传递转矩、轴径较 小。由于存在缸体的倾斜力 矩,制造精度要求较高,否 则易损坏配流盘 柱塞泵由缸体与柱塞 柱 构成,柱塞在缸体内作往 复运动,在工作容积增大 塞 时吸油,工作容积减小时 泵 排油。采用端面配油
伺服油泵的工作原理
伺服油泵工作原理及其与变量泵性能对比 伺服油泵液压系统现用的开环变量泵系统的主要区别是:动力源不同。开环变量泵液压系统的动力源是注塑机专用三相电动机驱动开环变量泵,而伺服油泵液压系统的动力源则是用伺服电机驱动油泵(齿轮泵或柱塞泵),液压系统的核心部分——动力源的改变,意味着液压系统的控制和性质发生了本质的变化。本文将详细叙述伺服油泵的工作原理及其性能,并将其性能与变量泵性能做一对比。 伺服油泵是由伺服电机驱动的,即将试用的这颗伺服油泵是由交流伺服电机驱动的。伺服电机属于控制电机的范畴,其主要功能是传递和转换信号,如伺服电机将电压信号转换为转矩和转速,等等。对控制电机的主要要求:动作灵敏准确、运行可靠、耗电少等,也适用于伺服电机。 在液压系统中,泵的输出功率为W=PXQ ,式中,P为泵输出压力,Q为泵输出流量,从该表达式中可以看出,改变泵的输出压力或输出流量,均可改变泵的输出功率。我们知道,注塑机各个动作所需的功率不一样,而且变化较大,若能使泵的输出功率与负载功率相匹配,则可达到节省能源的效果。不难看出,在负载一定的情况下,在定量泵液压系统中,由于泵输出的流量是一定值,但负载有速度要求,所以一部分流量需从主溢流阀流回油箱,这就是我们常说的溢流损耗。另外,由于用比例节流阀做调速回路,所以又存在节流损耗。在开环变量泵液压系统中,由于有斜盘改变泵出口的大小,从而改变了泵输出流量的大小,所以没有溢流损耗,但是,开环变量泵在流量控制状态下也存在着节流损耗,所以,开环变量泵的调速回路是容积——节流调速回路。闭环变量泵由于其是用一比例减压阀或比例伺服阀控制斜盘活塞,使斜盘保持一定的开口,当泵输出压力达到预定压力(由压力传感器监测)时,泵切换至压力控制状态,所以,闭环变量泵既无溢流损失,也无节流损失。由于这类液压系统在国内都是用得比较多的,相信大家对这些系统的原理都已耳熟能详,这里不再赘述。
电子数据取证问题及对策建议
电子数据取证问题及对策建议 [摘要]修改后的刑事诉讼法第48条首次将“电子数据”纳入法定证据范围,并与视听资料同列为第八种刑事证据。实践中在电子证据取证方面存在诸问题须引起重视,通过对其原因分析提出相关对策建议。 [关键词]电子证据;技术人员;取证 为了保证新刑事诉讼法的正确实施,发挥电子证据在证明犯罪中的作用,如何获取电子证据就成为一个重要问题须引起重视。 一、电子证据取证中遇到的问题 从目前司法实践看,职务犯罪日趋隐秘化和高科技化,这为侦查工作带来了很大的难度和挑战,需要检察机关充分运用科技手段,收集电子证据。但由于电子证据是一种新证据,一般侦查人员又不懂这方面技术,因而实践中在电子证据取证方面遇到以下主要问题: 一是技术人员与侦查人员配合不够默契。技术人员与侦查人员分属不同的部门,平时接触少,所以在实际的工作中技术人员与侦查人员配合不很默契。这里所说的“配合”包括外出取证前准备阶段的配合、外出取证过程中的配合、外出取证回来后对数据进行分析时的配合。首先是外出取证前准备阶段的配合问题,如自侦部门在办理案件过程中,如果认为犯罪嫌疑人或有关人员的电脑或者存储设备中存在有关证据需要收集的,就会要求技术人员跟随前往外出收集,但案件的基本情况仍需保密。由于每个现场都有它的特异性,如果事先不告知技术人员,到取证现场后,技术人员往往会出现措手不及或准备不充分的情况,这时就会导致取证效率低、取证效果不理想、更有甚者会导致证据流失的问题。其次是取证过程中的配合问题,由于搜查现场会出现各种各样的突发问题,需要侦查人员与技术人员的默契配合。最后是外出取证回来后对数据进行分析时的配合。技术人员就删除数据进行恢复后,对数据对案件的侦破作用知之甚少。 二是取证中遇到的一些技术难题。随着科技的高速发展,职务犯罪中往往出现一些高新设备和技术,需要技术人员熟悉各种设备,掌握各种技术和知识。只有这样,才能保证技术有效地收集到所需要的电子证据。但从目前司法实践看,由于技术人员的培训不及时,往往难以跟上时代前进的步伐,笔者在实践中就遇到一些技术难题,比如在一次外出取证时,要对犯罪嫌疑人的一台电脑的硬盘作复制键时,但发现机器是处于开机状态的,于是按照规程,直接拔掉机箱后的电源,结果硬盘出现了坏道。另一次是对一台CANON相机的SDRAM卡中的删除数据进行恢复,已知这台相机上存储有5天的照片,相机上的照片只是被误删除了,没有被格式化,而且没有覆盖新数据,但在使用X-WAY、ENCASE、PHOTORECOVER等软件进行恢复时,发现只恢复出前3天的数据,后两天100多张照片没有了。
电子数据取证原则与步骤
电子数据取证原则与步骤 电子物证检材提取有二种基本形式:提取硬件物证检材和电子信息物证检材。如果电子设备可能被用作犯罪工具、作为犯罪目标或是赃物,或者是电子设备内含有大量与案件相关的信息,就有可能需要提取硬件作为物证检材。在准备提取整台计算机作为检材时,应考虑同时提取该计算机的外围硬件,如打印机、磁盘驱动器、扫描仪、软盘和光盘等。如果在案件中电子信息可能是用于证明犯罪的证据,或者电子信息是非法占有的,这时候电子物证检材提取的焦点是电子设备内的电子信息内容,而不是硬件本身。提取电子信息物证检材通常有二种选择:复制电子设备储存的所有电子信息,或者是仅仅复制需要的电子信息。选择哪种方式主要根据案件情况和侦查需要决定。 网络连接的计算机储存的电子信息可以快速传递、多处储存和远程操作删改。如果一个计算机网络涉及犯罪活动,电子数据证据通常分布在多台计算机中,应尽可能地提取所有硬件或网络中的电子信息作为物证检材。提取网络计算机内的电子数据证据需要更多的计算机技术和案件调查经验,一般需要由专业的电子物证专家完成。不适当的提取操作很可能造成电子数据证据丢失或提取不完整的严重后果。 第一节电子数据取证原则 电子数据取证的原则:1.尽早地搜集整理证据,能够得到第一手的信息,并尽可能地做到取证的过程公正和公开; 2.不要破坏或改变证据,尽可能少的改变系统状态,在不对原有物证进行任何改动或损坏的前提下获取证据; 3.证明所获取的证据和原有的数据是相同的;4.在不改变数据的前提下对其进行分析;5.在取证时使用的软件应是合法的。 为此,在进行电子物证检验的过程中,要采取以下做法来保证原证据不被改变或损坏: 1.尽早收集证据,以防原证据被改变或计算机系统状态被改变;
四柱液压机工作原理解读
四柱液压机工作原理 四柱液压机四柱液压机是油泵把液压油输送到集成插装阀块,通过各个单向阀和溢流阀把液压油分配到油缸的上腔或者下腔,在高压油的作用下,使油缸进行运动。液压机是利用液体来传递压力的设备。液体在密闭的容器中传递压力时是遵循帕斯卡定律。 四柱液压机由主机及控制机构两大部分组成。液压机主机部分包括液压缸、横梁、立柱及充液装置等。动力机构由油箱、高压泵、控制系统、电动机、压力阀、方向阀等组成。[1] (二用途https://www.360docs.net/doc/912067797.html, 该液压机适用于可塑性材料的压制工艺。如粉末制品成型、塑料制品成型、冷(热挤压金属成型、薄板拉伸以及横压、弯压、翻透、校正等工艺。 四柱液压机具有独立的动力机构和电器系统,采用按钮集中控制,可实现调整、手动及半自动三种操作方式。 (三特点 机器具有独立的动力机构和电气系统,采用按钮集中控制,可实现调整、手动及半自动三种工作方式:机器的工作压力、压制速度,空载快下行和减速的行程和范围,均可根据工艺需要进行调整,并能完成顶出工艺,可带顶出工艺、拉伸工艺三种工艺方式,每种工艺又为定压,定程两种工艺动作供选择,定压成型工艺在压制后具有顶出延时及自动回程。 液压机简介 (又名:油压机利用帕斯卡定律制成的利用液体压强传动的机械,种类很多。当然,用途也根据需要是多种多样的。如按传递压强的液体种类来分,有油压机和水压机两大类。水压机机产生的总压力较大,常用于锻造和冲压。锻造水压机又分为模锻水压机和自由锻水压机两种。模锻水压机要用模具,而自由锻水压机不用模具。我国制造的第一台万吨水压机就是自由锻造水压机。
工作原理 四柱液压机[2]的液压传动系统由动力机构、控制机构、执行机构、辅助机构和工作介质组成。动力机构通常采用油泵作为动力机构,一般为积式油泵。为了满足执行机构运动速度的要求,选用一个油泵或多个油泵。低压(油压小于2.5MP用齿轮泵;中压(油压小于6.3MP用叶片泵;高压(油压小于32.0MP用柱塞泵。各种可塑性材料的压力加工和成形,如不锈钢板钢板的挤压、弯曲、拉伸及金属零件的冷压成形,同时亦可用于粉末制品、砂轮、胶木、树脂热固性制品的压制。 安全操作 1、液压机操作者必须经过培训,掌握设备性能和操作技术后,才能独立作业。 2、作业前,应先清理模具上的各种杂物,擦净液压机杆上任何污物。 3、液压机安装模具必须在断电情况下进行,禁止碰撞启动按钮、手柄和用脚踏在脚踏开关上。 4、装好上下模具对中,调整好模具间隙,不允许单边偏离中心,确认固定好后模具再试压。 5、液压机工作前首先启动设备空转5分钟,同时检查油箱油位是否足够、油泵声响是否正常、液压单元及管道、接头、活塞是否有泄露现象。深圳油压机TM系列引 6、开动设备试压,检查压力是否达到工作压力,设备动作是否正常可靠,有无泄露现象。 7、调整工作压力,但不应超过设备额定压力的90%,试压一件工件,检验合格后再生产。 8、对于不同的液压机型材及工件,压装、校正时,应随时调整压机的工作压力和施压、保压次数与时间,并保证不损坏模具和工件。
液压泵的工作原理及分类
液压泵是为液压传动提供加压液体的一种液压元件,是泵的一种。液压泵的功能是把动力机(如电动机和内燃机等)的机械能转换成液体的压力能。 液压泵工作原理 液压泵是为液压传动提供加压液体的一种液压元件,是泵的一种。它的功能是把动力机(如电动机和内燃机等)的机械能转换成液体的压力能。输出流量可以根据需要来调节的称为变量泵,流量不能调节的称为定量泵。液压系统中常用的泵有齿轮泵、叶片泵和柱塞泵三种,液压泵正常工作必备的条件是: 应具有密封容积。密封容积的大小能交替变化。应有配流装置。配流装置的作用是保证密封容积在吸油过程中与油箱相通,同时关闭供油通路;压油时与供油管路相通而与油箱切断。 1、齿轮泵:体积较小,结构较简单,对油的清洁度要求不严,价格较便宜;但泵轴受不平衡力,磨损严重,泄漏较大。 外啮合齿轮泵 当齿轮旋转时,在A腔,由于轮齿脱开使容积逐渐增大,形成真空从油箱吸油,随着齿轮的旋转充满在齿槽内的油被带到B腔,在B腔,由于轮齿啮合,容积逐渐减小,把液压油排出 利用齿和泵壳形成的封闭容积的变化,完成泵的功能,不需要配流装置,不能变量结构最简单、价格低、径向载荷大 内啮合齿轮泵 当传动轴带动外齿轮旋转时,与此相啮合的内齿轮也随着旋转。吸油腔由于轮齿脱开而吸油,经隔板后,油液进入压油腔,压油腔由于轮齿啮合而排油 典型的内啮合齿轮泵主要有内齿轮、外齿轮及隔板等组成利用齿和齿圈形成的容积变化,完成泵的功能。在轴对称位置上布置有吸、排油口。不能变量尺寸比外啮合式略小,价格比外啮合式略高,径向载荷大 2、叶片泵 分为双作用叶片泵和单作用叶片泵。这种泵流量均匀,运转平稳,噪音小,工作压力和容积效率比齿轮泵高,结构比齿轮泵复杂。 转子旋转时,叶片在离心力和压力油的作用下,尖部紧贴在定子内表面上。这样两个叶片与转子和定子内表面所构成的工作容积,先由小到大吸油后再由大到小排油,叶片旋转一周时,完成两次吸油和两次排油 利用插入转子槽内的叶片间容积变化,完成泵的作用。在轴对称位置上布置有两组吸油口和排油口径向载荷小,噪声较低流量脉动小 3、柱塞泵 容积效率高,泄漏小,可在高压下工作,大多用於大功率液压系统;但结构复杂,材料和加工精度要求高,价格贵,对油的清洁度要求高。一般在齿轮泵和叶片泵不能满足要求时才用柱塞泵。还有一些其他形式的液压泵,如螺杆泵等,但应用不如上述3种普遍。 柱塞泵由缸体与柱塞构成,柱塞在缸体内作往复运动,在工作容积增大时吸油,工作容积减小时排油。采用端面配油 径向载荷由缸体外周的大轴承所平衡,以限制缸体的倾斜利用配流盘配流传动轴只传递转矩、轴径较小。由于存在缸体的倾斜力矩,制造精度要求较高,否则易损坏配流盘 4、螺杆泵 一根主动螺杆与两根从动螺杆相互啮合,三根螺杆的啮合线把螺旋槽分割成若干个密封容积。当螺杆旋转时,这个密封容积沿轴向移动而实现吸油和排油 利用螺杆槽内容积的移动,产生泵的作用不能变量无流量脉动径向载荷较双螺杆式小、尺寸