一种快速运动目标的背景提取算法
收稿日期:2003209208;修返日期:2003210224
一种快速运动目标的背景提取算法
袁基炜,史忠科
(西北工业大学自动控制系,陕西西安710072)
摘 要:提出了一种快速运动目标的背景自动提取算法。该算法先对固定场景下获取的当前帧进行帧差分的二值化处理,然后对该二值化图像进行形态学膨胀、重建及腐蚀,最后根据形态学操作后的二值图像用当前帧对背景进行更新,这样经过数十帧的迭代,便可提取出背景。试验结果表明,用该算法提取背景不但效果好,而且提取速度也快。
关键词:帧差分;形态学;背景提取
中图法分类号:TP391 文献标识码:A 文章编号:100123695(2004)0820128202
An Algorithm of Automatic Background Extraction of
Target Based on Fast Motion
YUAN Ji 2wei ,SHI Zhong 2ke
(Dept.of A utomatic Cont rol ,Northwestern Polytechnical U niversity ,Xi ’an S hanxi 710072,Chi na )
Abstract :This paper presents an algorithm of automatic background extraction of target based on fast motion.At first ,the
frame difference of the current frame under a fixed scene is binarized ,and the binary image of the frame difference is operated by consecutive morphological dilation ,reconstruction and erosion ,then the current frame updates the background according to the binary image processed by morphology.The background can be extracted after dozens of iterative operations of the subsequent frames.The experiments show that the algorithm can extract background effectively and quickly.K ey w ords :Frame Difference ;Morphology ;Background Extraction
1 概述
随着计算机多媒体技术的迅猛发展,视频处理技术在ITS (Intelligent Transportation System )中得以广泛应用。车流量检测、高速公路监控等都引入了数字视频技术,其中视频分割技术在智能交通系统中的应用成为数字视频技术的一个研究热点,而基于背景差分(背景和当前帧的差分)的分割方法是视频分割的研究重点。在固定场景下,即摄像头和监视场景间无相对运动时,背景提取是基于背景差分的视频分割方法的一个基本环节,常用的办法是手动给出,这种办法需要人观察到没有前景目标时启动相机获取背景。这种背景的提取方法显然增加了人力、物力的需求,而且在高速公路等交通场景中难以用人为的方法获取背景。因此,自动提取运动目标的背景已成为视频分割所需解决的前期问题。只有实现背景的自动提取,才能使整个图像处理过程实现自动化。Surendra Gupte 等人
[1]
提出了一种固定场景下快速运动目标的背景自动提取算法,该算法是以帧差分为基础,而帧差分存在着容易把帧差分中纹理相似的前景交叠区域误作背景[2]
提取的不足。本文对该算法进行了改进,并提出了一种基于数学形态学的背景自动提取算法。
2 Surendra 算法
Surendra 算法提取背景的思想为:通过当前帧帧差分的二
值图找到运动区域,对运动区域内的背景保持不变,而非运动区域的背景则用当前帧进行更新,经过一定时间的迭代便可提取出背景。其步骤如下:
(1)把第一帧图像I 0作为原始背景B 0。(2)令迭代参数i =1。
(3)求当前帧帧差分的二值图像BW i 。
BW i =
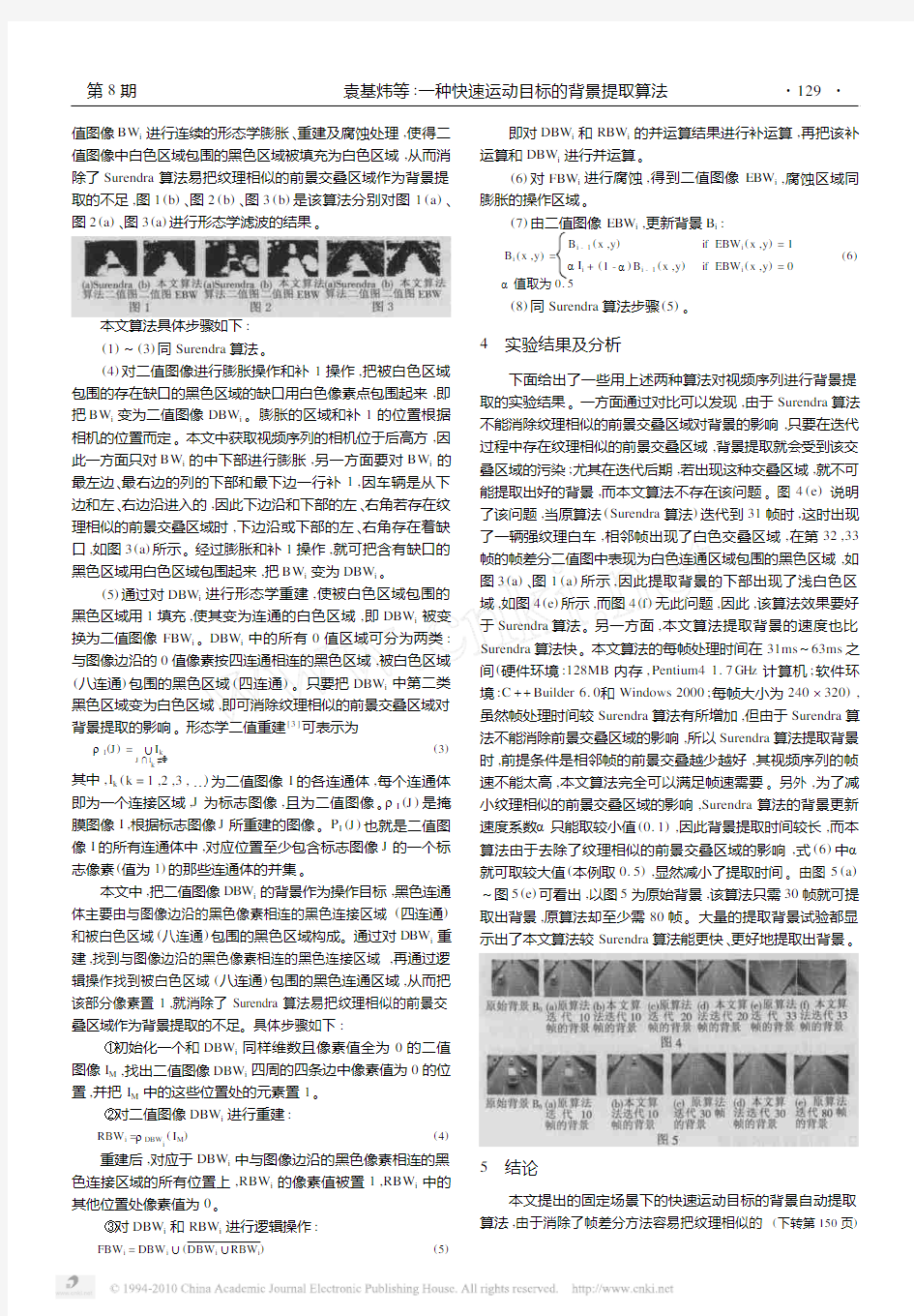
1 if abs (I i -I i -1)≥T 0 if abs (I i -I i -1) (1) 其中,I i ,I i -1分别为当前帧和上一帧图像,abs (I i -I i -1)为连续 两帧差分的模值图像(帧差分),T 为帧差分图像灰度直方图中最大峰值右边1/10最大峰值处所对应的灰度级。 (4)由二值图像BW i 更新背景B i 。 B i (x ,y )= B i -1(x ,y ) if BW i (x ,y )=1 αI i +(1-α)B i -1(x ,y )if BW i (x ,y )=0 (2) 其中,B i (x ,y ),BW i (x ,y )分别为背景图像和二值图像在坐标位 置(x ,y )处的值,更新速度系数α值取为0.1。 (5)i =i +1,返回到步骤(3),进行迭代,当迭代到一定步 数,便可结束迭代,并把此时的B i 视为提取的背景。 3 本文算法 由于Surendra 算法并没有对帧差分本身进一步处理,该算法存在着易把纹理相似的前景交叠区域作为背景提取的不足。具体表现为:当连续两帧间有纹理相似的前景交叠部分时,该交叠部分在Surendra 算法的二值图像BW i 中是被白色区域包围的黑色区域(有缺口的可能性),如图1所示。本文算法对二 ?821?计算机应用研究2004年 值图像BW i 进行连续的形态学膨胀、重建及腐蚀处理,使得二值图像中白色区域包围的黑色区域被填充为白色区域,从而消除了Surendra 算法易把纹理相似的前景交叠区域作为背景提 取的不足,图1(b )、图2(b )、图3(b )是该算法分别对图1(a )、图2(a )、图3(a )进行形态学滤波的结果 。 本文算法具体步骤如下: (1)~(3)同Surendra 算法。 (4)对二值图像进行膨胀操作和补1操作,把被白色区域 包围的存在缺口的黑色区域的缺口用白色像素点包围起来,即把BW i 变为二值图像DBW i 。膨胀的区域和补1的位置根据相机的位置而定。本文中获取视频序列的相机位于后高方,因此一方面只对BW i 的中下部进行膨胀,另一方面要对BW i 的最左边、最右边的列的下部和最下边一行补1,因车辆是从下边和左、右边沿进入的,因此下边沿和下部的左、右角若存在纹理相似的前景交叠区域时,下边沿或下部的左、右角存在着缺 口,如图3(a )所示。经过膨胀和补1操作,就可把含有缺口的黑色区域用白色区域包围起来,把BW i 变为DBW i 。 (5)通过对DBW i 进行形态学重建,使被白色区域包围的黑色区域用1填充,使其变为连通的白色区域,即DBW i 被变换为二值图像FBW i 。DBW i 中的所有0值区域可分为两类:与图像边沿的0值像素按四连通相连的黑色区域,被白色区域(八连通)包围的黑色区域(四连通)。只要把DBW i 中第二类黑色区域变为白色区域,即可消除纹理相似的前景交叠区域对背景提取的影响。[3]可表示为 ρI (J )=∪I k J ∩I k ≠Φ(3) 其中,I k (k =1,2,3,… )为二值图像I 的各连通体,每个连通体即为一个连接区域,J 为标志图像,且为二值图像。ρI (J )是掩 膜图像I ,根据标志图像J 所重建的图像。P I (J )也就是二值图像I 的所有连通体中,对应位置至少包含标志图像J 的一个标 志像素(值为1)的那些连通体的并集。 本文中,把二值图像DBW i 的背景作为操作目标,黑色连通体主要由与图像边沿的黑色像素相连的黑色连接区域(四连通)和被白色区域(八连通)包围的黑色区域构成。通过对DBW i 重建,找到与图像边沿的黑色像素相连的黑色连接区域,再通过逻辑操作找到被白色区域(八连通)包围的黑色连通区域,从而把该部分像素置1,就消除了Surendra 算法易把纹理相似的前景交叠区域作为背景提取的不足。具体步骤如下: ①初始化一个和DBW i 同样维数且像素值全为0的二值图像I M ,找出二值图像DBW i 四周的四条边中像素值为0的位置,并把I M 中的这些位置处的元素置1。 ②对二值图像DBW i 进行重建: RBW i =ρDBW i (I M ) (4) 重建后,对应于DBW i 中与图像边沿的黑色像素相连的黑色连接区域的所有位置上,RBW i 的像素值被置1,RBW i 中的其他位置处像素值为0。 ③对DBW i 和RBW i 进行逻辑操作: FBW i =DBW i ∪(DBW i ∪RBW i ) (5) 即对DBW i 和RBW i 的并运算结果进行补运算,再把该补运算和DBW i 进行并运算。 (6)对FBW i 进行腐蚀,得到二值图像EBW i ,腐蚀区域同膨胀的操作区域。 (7)由二值图像EBW i ,更新背景B i : B i (x ,y )= B i -1(x ,y ) if EBW i (x ,y )=1 αI i +(1-α)B i -1(x ,y )if EBW i (x ,y )=0 (6) α值取为0.5 (8)同Surendra 算法步骤(5)。 4 实验结果及分析 下面给出了一些用上述两种算法对视频序列进行背景提取的实验结果。一方面通过对比可以发现,由于Surendra 算法不能消除纹理相似的前景交叠区域对背景的影响,只要在迭代过程中存在纹理相似的前景交叠区域,背景提取就会受到该交叠区域的污染;尤其在迭代后期,若出现这种交叠区域,就不可能提取出好的背景,而本文算法不存在该问题。图4(e )说明了该问题,当原算法(Surendra 算法)迭代到31帧时,这时出现了一辆强纹理白车,相邻帧出现了白色交叠区域,在第32,33帧的帧差分二值图中表现为白色连通区域包围的黑色区域,如图3(a )、图1(a )所示,因此提取背景的下部出现了浅白色区域,如图4(e )所示,而图4(f )无此问题,因此,该算法效果要好于Surendra 算法。另一方面,本文算法提取背景的速度也比 Surendra 算法快。本文算法的每帧处理时间在31ms ~63ms 之 间(硬件环境:128MB 内存,Pentium41.7GHz 计算机;软件环境:C ++Builder 6.0和Windows 2000;每帧大小为240×320),虽然帧处理时间较Surendra 算法有所增加,但由于Surendra 算法不能消除前景交叠区域的影响,所以Surendra 算法提取背景时,前提条件是相邻帧的前景交叠越少越好,其视频序列的帧速不能太高,本文算法完全可以满足帧速需要。另外,为了减小纹理相似的前景交叠区域的影响 ,Surendra 算法的背景更新速度系数α只能取较小值(0.1),因此背景提取时间较长,而本算法由于去除了纹理相似的前景交叠区域的影响,式(6)中α就可取较大值(本例取0.5),显然减小了提取时间。由图5(a )~图5(e )可看出,以图5为原始背景,该算法只需30帧就可提取出背景,原算法却至少需80帧。大量的提取背景试验都显示出了本文算法较Surendra 算法能更快、更好地提取出背景。 5 结论 本文提出的固定场景下的快速运动目标的背景自动提取算法,由于消除了帧差分方法容易把纹理相似的(下转第150页) ? 921?第8期 袁基炜等:一种快速运动目标的背景提取算法 时,工作流机根据过程模型寻找可以进入就绪状态的活动(候选活动)。对于每个候选活动,工作流机请求RAS 进行资源选择。 (3)规则解释。RAS 从过程模型中获得活动的资源指派 规则,并提交给指派规则解释器链进行处理。指派规则将在指派规则解释器链中顺序传递,直到遇到能够对它进行解释的指派规则解释器。解释器通过各个接口收集相关的属性,计算出满足要求的资源ID 。 (4)结果返回。指派结果一方面作为工作项返回到工作流机,一方面作为过程状态的一部分保存在历史指派数据中。 3.3 实现机制 资源指派系统通常实现为工作流机的一个子系统。它也可以实现为一个独立的系统,这样就能为多个WfMS 提供资源指派功能。OM G 的资源指派接口(RAI )体现了这一思想[5]。在原型系统中我们采用了第一种方法,因此它可以直接访问过程模型和过程实例状态信息。这里主要讨论规则解释器链和资源管理服务访问技术。 (1)规则解释器链 规则解释器链为系统提供了一种灵活的扩充机制,使之可以通过“插接”新的模块来增加对不同的资源类型和资源管理方法的支持。用户在配置文件中指定规则解释器的名字,系统将在运行期自动载入这些规则解释器。多个规则解释器通过规则解释器链包装起来,向外部提供一个简单、统一的访问接口。其UML 类图如图4所示,其中RAHRRuleProcessor 用来处理与人力资源相关的指派规则,而RAWHRuleProcessor 用来处理与仓库资源相关的指派规则,两者都是继承自抽象基类 RABaseRuleProcessor 的具体类。 图4 规则解释器链 具体类的载入由一个专门的工厂类来处理,它负责完成从名字(由配置文件给出)到类实例的转换。Java 语言对这种转换提供了比较直接的支持,例如下面的代码动态地载入一个指派规则解释器: Class cls =Class.forName ( ”workflow.core.RAWHRuleProcessor ” );RABaseRuleProcessor rp = (RABaseRuleProcessor )(cls.newInstance ()); (2)资源管理服务访问机制 由于不同企业和系统所采用的资源元模型不尽相同,因此我们将资源管理功能独立出来,作为一种服务在WfMS 外部 实现。这样,用户就可以扩充或切换企业的资源模型而不对过程模型产生影响,大大降低了过程模型和资源模型的耦合度。同时,WfMS 也能够与其他企业应用共享同一个资源模型,避免了信息孤岛带来的各种问题。 为了屏蔽资源管理的具体细节,资源管理服务访问接口必须具有足够的灵活性。一种常用的实现方法是采用某种资源指派语言来对资源进行查询和选择,查询语句可以嵌入到资源指派规则中,或者直接作为资源指派规则。 资源指派语言的表达能力是一种实现上的权衡。表达能力越高,WfMS 处理资源指派逻辑的能力就越强,因而可以提高应用开发的效率和速度。但是,过于复杂的资源指派语言一方面提高了WfMS 的复杂性,另一方面也会增加开发人员学习和使用的难度。 我们采用了一种折中的方法,将资源元模型转换为关系数据库模型,这样就可以直接利用SQL 语言作为资源指派语言,并通过一个外部的服务代理来完成最终的资源查询操作;另一方面,由于允许插入新的指派规则解释器,从而使系统具有了更大的扩充潜力和可适应性。 4 结束语 在工作流管理系统中,资源指派是一项重要的功能。本文对资源指派规则的表达机制进行了分析,并在此基础上研究开发了一个基于指派规则和资源管理服务的资源指派原型系统,它较好地考虑了系统的可扩充性,并可以方便地实现资源模型的共享。参考文献: [1] S Jablonski ,C Bubler.Workflow Management Modeling Concepts ,Architecture and Implementation [M ].International Thomson Com 2puter Press ,1996.[2]Workflow Management Coalition.The Workflow Reference Model [EB/OL ].Document Number TC0021003,1995201219. [3] Workflow Management Coalition.Workflow Process Definition In 2terface 2XML Process Definition Language (XPDL )[EB/OL ].WfMC 2TC 21025,version 1.0Beta ,2002. [4]Workflow Management Coalition.Workflow Handbook[M ].L Fish 2 er ,ed.,Future Strategies Inc.,2001.[5] Object Management Group.Workflow Resource Assignment Inter 2faces (RAI )Request for Proposal[EB/OL ].OM G Document bom/,2000201203. 作者简介: 陈大峰,男,湖南湘阴人,研究生,研究方向为分布计算及过程管理;吴泉源,男,教授,博士生导师,研究方向为人工智能、分布计算环境及网络安全;刘必欣,女,博士生,研究方向为分布计算及过程管理。 (上接第129页)前景交叠区域作为背景提取的不足,因此用本 文算法提取背景不但背景提取的效果好,而且背景提取的速度也快。参考文献: [1] Surendra Gupte ,et al.Detection and Classification of Vehicles [J ].IEEE Transactions on Intelligent Transportation Systems ,2002,(3):372471 [2]W Liu ,J Zhang.Image Sequence Segmentation Using Curve Evolu 2 tion and Improved Background Subtraction [C ].Proceedings of SPIE ,2001.127. [3]Luc Vincent.Morphological Grayscale Reconstruction in Image Anal 2 ysis :Applications and Efficient Algorithms [J ].IEEE Transactions on Image Processing ,1993,(2):1762201. 作者简介: 袁基炜(19762),男,博士研究生,主要研究方向为计算机视觉、图像处理、自动化仪表等;史忠科(19562),男,教授,博士生导师,主要研究方向为鲁棒控制、交通规划、智能控制等。 ?051?计算机应用研究2004年 视频监控中运动目标自动提取技术 【摘要】本文分析了运动目标检测面临的一些问题,并针对这些问题提出了一种基于背景减法的检测算法,对监控场景进行无约束学习,迅速建立多个可靠的背景模型,在运动目标检测过程中根据场景的变化进行实时背景动态更新,同时利用图像腐蚀和图像膨胀算法对二值图像进行后处理,消除阴影,最终得到较为理想的运动目标。 【关键词】运动目标检测;背景减法;动态更新;消除阴影 1 背景及意义 随着计算机技术、通信技术、图像处理技术的不断发展,视觉跟踪目前已成为热点研究问题,对于运动目标的检测与识别[1-3]是其中的难点和重点。 运动目标检测是将被监视目标从背景中分离出来,是运动图像分析、智能监控、可视人机交互中的重要处理步骤,通过运动检测可以得到图像中的运动信息,提取序列图像中的运动人物或目标并对目标进行初步定位,简化了后续的运动跟踪、识别、分析的难度。它对于视频图像分析有着重要的意义,运动目标检测在很多领域都有非常重要的作用,在运动目标跟踪中,它是运动目标跟踪的基础和前提;此外,运动目标检测在模式识别、计算机视觉等领域也得到了广泛的应用。对今后在计算机视觉领域的学习研究都有着重要及深远意义。 2 背景模型及获取 本文针对的主要是单高斯背景模型。这里,我们只详细地描述一个象素的背景模型,对于所有其它象素,背景模型都是相类似的。一个背景象素通过一个均值为μ,标准差为σ的高斯分布模型化。另外,本文的背景提取方法对多高斯背景模型(如周期性运动的背景)也有较好的处理能力。 背景图像的颜色空间也是背景特征的一部分,通常的颜色空间有RGB颜色空间、HSV颜色空间、YUV颜色空间等。不同的颜色空间用不同的方式描述图像象素。理论上讲,当描述象素的时候,颜色空间通常采用RGB,因为RGB值是大多数帧提供者愿意提供的。然而,RGB颜色空间对于颜色感知来说表现得不尽如人意,因为通过在RGB颜色空间中两颜色间计算得到的距离并不能反映它们之间感知的相似度。 一种可以把象素度量的亮度信息和色度信息清楚分开的颜色模型(颜色空间)允许我们在考虑亮度信息的同时考虑色度信息。在Pfinder系统中采用了YUV 颜色空间,其中Y代表亮度,U和V代表色度,相似的,HSV颜色空间中,V 代表亮度,而H和S代表色度,然而,基于R,G,B的线性组合的色度描述子空间UV没有发散状的HS描述子空间直观。在本文的实现中,图象中的象素值是由HSV三值混合而成。每一个背景象素p(x,y)的分布是一个由H(x,y), 摘要 运动目标检测方法是研究如何完成对视频图像序列中感兴趣的运动目标区域的“准确定位”问题。光流场指图像灰度模式的表面运动,它可以反映视频相邻帧之间的运动信息,因而可以用于运动目标的检测。MATLAB这种语言可移植性好、可扩展性强,再加上其中有丰富的图像处理函数,所以利用MATLAB 软件来用光流法对运动目标的检测中具有很大的优势。本设计主要可以借助matlab软件编写程序,运用Horn-Schunck算法对图像前后两帧进行处理,画出图像的光流场。而图像的光流场每个像素都有一个运动矢量,因此可以反映相邻帧之间的运动,分析图像的光流场就可以得出图像中的运动目标的运动情况。 关键字:光流法;Horn-Schunck算法;matlab 目录 1光流法的设计目的 (1) 2光流法的原理 (1) 2.1光流法的介绍 (1) 2.1.1光流与光流场的概念 (1) 2.1光流法检测运动目标的原理 (2) 2.1.1光流场计算的基本原理 (2) 2.2.2基于梯度的光流场算法 (2) 2.2.3Horn-Schunck算法 (3) 2.2.4光流法检测运动目标物体的基本原理概述 (5) 3光流法的程序具体实现 (6) 3.1源代码 (6) 3.1.1求解光流场函数 (6) 3.1.2求导函数 (9) 3.1.3高斯滤波函数 (9) 3.1.4平滑性约束条件函数 (10) 3.1.5画图函数 (10) 4仿真图及分析 (12) 结论 (13) 参考文献 (14) 1 光流法的设计目的 数字图像处理,就是用数字计算机及其他有关数字技术,对图像进行处理,以达到预期的目的。随着计算机的发展,图像处理技术在许多领域得到了广泛应用,数字图像处理已成为电子信息、通信、计算机、自动化、信号处理等专业的重要课程。 数字图像处理课程设计是在学习完数字图像处理的相关理论后,进行的综合性训练课程,其目的是:使学生进一步巩固数字图像处理的基本概念、理论、分析方法和实现方法;增强学生应用Matlab编写数字图像处理的应用程序及分析、解决实际问题的能力;尝试所学的内容解决实际工程问题,培养学生的工程实践能力。 运动目标检测是数字图像处理技术的一个主要部分,近些年来,随着多媒体技术的迅猛发展和计算机性能的不断提高,动态图像处理技术日益受到人们的青睞,并且取得了丰硕的成果,广泛应用于交通管理、军事目标跟踪、生物医学等领域。 因此,基于光流法,实现运动目标的检测是本文的研究对象。结合图书馆书籍、网上资料以及现有期刊杂志,初步建立起运动目标检测的整体思路和方法。 2 光流法的原理 2.1 光流法的介绍 2.1.1 光流与光流场的概念 光流是指空间运动物体在观测成像面上的像素运动的瞬时速度,它利用图像序列像素强度数据的时域变化和相关性来确定各自像素位置的“运动”,即反映图像灰度在时间上的变化与景物中物体结构及其运动的关系。将二维图像平面特定坐标点上的灰度瞬时变化率定义为光流矢量。视觉心理学认为人与被观察物体 大作业 几种运动估计算法比较 一、实验内容 简要介绍各种运动估计算法,并比较不同运动估计算法的性能,主要考虑各算法的运算速度和精度。 二、实验背景 视频原始图像中存在着大量的信息冗余,如时间冗余、空间冗余、信息熵冗余、谱间冗余、几何结构冗余、视觉冗余和知识冗余等等。运动估计是视频压缩编码中的核心技术之一,采用运动估计和运动补偿技术可以消除视频信号的时间冗余以提高编码效率。如何提高运动估计的效率,使运动估计算法的搜索过程更健壮、更快速、更高效成为目前研究的热点。 运动估计的基本思想是尽可能准确地获得序列图像帧间的运动位移,即运动矢量。因为运动估计越准确,预测补偿的图像质量越高,补偿的残差就越小,补偿编码所需位数越少,需要传输的比特率就越小。利用得到的运动矢量在帧间进行运动补偿。补偿残差经过变换、量化、编码后与运动矢量一起经过熵编码,然后以比特流形式发送出去。 运动估计算法多种多样,大体上可以把它们分成四类:块匹配法、递归估计法、贝叶斯估计法和光流法。其中块匹配运动估计算法因其具有算法简单、便于VLSI实现等优点得到广泛应用。所以本文将重点介绍块匹配运动估计算法,并对各种块匹配算法在计算速度和估计精度上进行简单比较。 三、实验原理 (一)、像素递归技术 像素递归技术是基于递归思想。在连续帧中像素数据的变化是因为物体的移位引起的,郑么如果沿着梯度方向在某个像素周圈的若干像素作迭代运算,运算会最后收敛于一个固定的运动估计矢量,从而预测该像素的位移。 (二)、块匹配运动估计 块匹配运动估计是把图像帧划分为若干互不重叠的块,并以块为单位寻找目标帧中每块在参考帧(上一帧或者其它帧)中最优匹配的块的相对位置,假设图像中每块的大小为M 运动估计算法简述 标签:搜索运动估计预测矢量算法分类:探索H.2642007-02-03 13:59 马上要做运动估计算法,重点整理了一下这方面的内容。 帧间预测编码可以简单地分为单向预测、双向预测、多帧预测。而H.264 标准采用了多帧预测,参考帧可达5—15帧。 运动补偿采用较多的有运动矢量估计[重叠块运动补偿(OBMC)]、全局运动估计、基于象素点的运动估计、基于区域的运动估计、基于网格的运动估计。1.单向预测原理:将重建帧和参考帧送运动参数估值器(ME)比较得到运动矢量,再将运动矢量和重建帧送到运动补偿预测器中,得预测帧Ft^(x,y)。 Ft^(x,y)=Ft(x+i,y+j) 其中(i,j)即MV 2.基于块匹配算法的运动矢量估计 简单地说就是以块为单位分配运动矢量。在前一帧搜索区(M+2Wx,M+2Wy)内找到与当前帧块相匹配的块,位移d(i,j)即为运动矢量。 常用的块匹配准则有:均方误差(MSE)最小准则,绝对误差均值(MAD)最小准则、NCCF准则。 搜索方法: a.穷尽搜索计算(2Wx+1)×(2Wy+1)个MAD值,全局最优,计算量大。 b.快速搜索 (1)分层的和多分辨率的快速块匹配方法 (2)基于连续消除的快速块匹配方法 (3)固定搜索模式的快速块匹配方法(e.g.三步搜索法) (4)基于时空相关性和视觉特性的快速块匹配方法 3.重叠块运动补偿(OBMC) 为解决方块效应特别是运动矢量估计不准确或物体运动不是简单的平移运动以及一个块中有多个不同物体运动时的问题,采用OBMC方法,即一个像素的预测不仅基于其所属块的MV估计,还基于相邻块的MV估计。 4.运动估计 ?运动表示法: (1)基于块的运动表示法 帧间宏块分割区域大小的选择:大分区,表征MV的选择和区分割类型的比特数较少,但运动压缩的冗余度较高,运动补偿残差在多细节区域能量很高。小分区,运动补偿残差能量较低,但需要较多的表征MV的选择和区分割类型的比特数,运动压缩的冗余度较低。 一般策略:平缓区域大分区,多细节区域小分区。 树状结构运动补偿,宏块和子宏块各4种分割方法。 色度成分均为量度成分水平、垂直尺寸的1/2。 (2)亚像素位置的内插 亚像素运动矢量:亮度精度1/4,色度精度1/8 对亮度成分,用六抽头滤波器对整数像素点内插:左右相邻的6个像素的加权均值得1/2像素点,然后是线性滤波得到1/4像素点。 对色度块以类似方法得到1/4像素点,再次进行线性内插就得到1/8精度MV. (3)运动矢量在时空域的预测方式 空间 (1)运动矢量中值预测 (2)空间域的上层块模式运动矢量(最优) 时间 (1)前帧对应块运动运动矢量预测 (2)时间域的临近参考帧运动矢量预测 (4)匹配误差在时空域上的预测方式 H.264定义的匹配误差函数 J(MV,λMOTION)=SAD(s,c(MV))+λMOTION×R(MV-PMV)。 匹配误差在时空域的预测方式与运动矢量类似 空间 (1)中值预测 (2)上层预测 时间 (1)前帧对应块的预测 (2)时间域的临近参考帧预测(最优) ?运动估计准则分类: (1)MSE最小(2)MAD最小(3)NTD ——子集匹配法大大减少每帧图像的平均搜索时间 ?运动搜索算法 (1)全局搜索算法 (2)分数精度搜索算法 (3)快速搜索算法 1)二位对数搜索法 2)三步搜索法 1 绪论 1.1 课题研究背景及意义 运动目标检测是图像处理与计算机视觉的一个分支,在理论和实践上都有重大意义,长久以来一直被国内外学者所关注。在实际中,视频监控利用摄像机对某一特定区域进行监视,是一个细致和连续的过程,它可以由人来完成,但是人执行这种长期枯燥的例行监测是不可靠,而且费用也很高,因此引入运动监测非常有必要[1]。它可以减轻人的负担,并且提高了可靠性。概括起来运动监测主要包括三个内容[2]:运动目标检测,方向判断和图像跟踪。运动目标检测是整个监测过程的基础,运动目标的提取准确与否,直接关系到后续高级过程的完成质量。 1.2 国内外研究现状 运动目标检测在国外已经取得了一些的研究成果[3],许多相关技术已经开始应用到实际系统中,但是国内研究相对落后,与国外还有较大差距。传统的视频目标提取大致可以分两类,一类以空间同性为准则,先用形态学滤波器或其他滤波器对图像作预处理;然后对该图像的亮度、色度或其他信息作空间上的分割以对区域作边缘检测;之后作运动估计,并合并相似的运动区域以得到最终的提取结果。如光流算法、主动轮廓模型算法。此类方法结果较为准确但是运算量相对较大。另一类算法主要以时间变化检测作为准则,这类算法主要通过帧差检测图像上的变化区域和不变区域,将运动物体与静止背景进行分割。此类方法运算量小,提取结果不如前类方法准确。此外,还有时空结合方法、时空亮度梯度信息结合的方法等等[4]。本文将围绕以时间变化监测为基础的方法展开分析和讨论。 1.3 本文结构 第1章介绍了本文的研究意义及国内外发展状况;第2章分为四个部分详细讲述了运动目标检测的方法,介绍了背景提取与更新算法,检测算法,阈值选取,形态学滤波等;第三章对全文作出了总结。 运动序列目标检测算法研究及DSP实现 李文艳,王月琴,张笑微 (西南科技大学信息工程学院四川绵阳621010) 摘要:由于实际场景的多样性,目前常用的运动目标检测算法都还存在一定程度的缺陷,因此本文提出了一种将帧差法和背景减法相结合的方法,实现快速精确地检测和提取运动目标。实验结果表明,本方法是比较实用的,能较好满足实时视频监控系统的要求。最后将程序移植到基于DSP的平台上,进行相应的优化后基本满足了实时性的要求。 关键词:目标检测;帧差法;背景减法 中图分类号:TP751.1 文献标识码:A Algorism Research of Moving Object Detection and DSP Implementation LI Wen-yan,WANG Yue-qin,ZHANG Xiao-wei (Southwest University of Science and Technology Mianyang Sichuan China 621010) Abstract: Because of the environment’s variety, the methods that have been used for moving object detection need to be improved. An algorithm based on two consecutive frames subtraction and background subtraction is presented and it can detect and extract object quickly and accurately. The results show that the proposed method is a practical one. It can meet the need of the real time video surveillance and monitoring system. The coding is transplanted in DSP, and the project is executed successfully on CCS simulator. Keywords: Object detection; Frames subtraction; Background subtraction 引言 运动目标的检测在智能监控等领域中得到了广泛的应用。运动目标的检测就是从视频流中去除静止背景提取出运动的目标,运动目标的有效分割对跟踪等后期处理非常关键。 本文提出了将帧间差分和背景减法相结合的方法。首先选取一帧作为背景帧, 建立各像素点的高斯模型。再运用帧间差分法对相邻两帧图像进行差分处理, 区分出背景点和变化的区域。然后将变化区域与背景帧的对应区域进行模型拟合区分出显露区和运动物体。 1 运动目标检测算法总体流程 采用帧间差分与背景减法相结合的算法进行运动目标检测,包括运动目标的检测和将检测到的运动目标从背景中分割出来两部分,其系统框架流程图如图1所示。 图1 运动目标检测流程图 这种设计充分利用了被检测区域部分时间静止的特点,具有智能检测的功能,它只在检 目录 目录 (1) 前言 (2) 1 定位信息的接收和提取 (2) 1.1 初始化串口 (2) 1.2 定位信息的接收 (3) 1.3 定位信息的提取 (3) 2 坐标变换 (5) 3.参数转换 (6) 3.1七参数与三参数的概论 (6) 3.2七参数与三参数的理论性试验 (7) 一、大地高对坐标转换的影响 (7) 二、七参数与三参数对坐标转换的影晌 (7) 三、大地高转换为正常高 (7) 4.求取转换参数的一些方法 (8) 5.小结 (8) 参考文献 (9) 前言 全球定位系统(GPS)是近年来开发的最具有开创意义的高新技术之一,其全球性、全能性和全天候性的导航定位、定时和测速优势必然会在诸多领域中得到越来越广泛的应用。在实际应用中,GPS 接收机输出的定位信息是通过RS232 串口传递给计算机,计算机主程序需要将GPS定位信息进行判别并提取所需要的有用数据(如目标当前的经纬度坐标、海拔、速度和时间等)。由于GPS 使用的坐标系WGS-84 与我国采用的坐标系不同,因此还需要将经纬度坐标进行坐标变换使其适应当地坐标系,再将当前目标显示在电子地图上。本文就针对当前比较普及的GPS,对其卫星定位信息的接收及其定位参数提取的实现和坐标转换的方法予以介绍。 1 定位信息的接收和提取 GPS 接收机主要由GPS 接收天线、变频器、信号通道、微处理器、存储器以及电源等部分组成。GPS接收机只要处于工作状态就会按照指令把接收并计算出的GPS 导航定位信息(NEMA0183 语句)通过串口传送到计算机中。计算机从串口读取数据有多种方法,Windows 中提供了一个串口通讯控件(MSComm),MSComm 控件可以采用轮询或事件驱动的方法从端口获取数据。比较常用的事件驱动方法:有事件(如接收到数据)时通知程序。在程序中需要捕获并处理这些通讯事件。这样可以很简单地利用串口进行通讯。在使用它之前,应将控件加在应用程序的对话框上。然后再用ClassWizard 生成相应的对象。 1.1 初始化串口 该控件有很多自己的属性,可以通过它的属性窗口来设置,也可以用程序设置。建议采用程序设置,这样更灵活。 if(m_ComPort.GetPortOpen())//设置串口配置信息前,先要关闭串口; m_ComPort.SetPortOpen(FALSE); m_ComPort.SetCommPort(1); //指定使用的串口为com1; m_ComPort.SetInBufferSize(1024);//设置输入缓冲区的大小; m_ComPort.SetOutBufferSize(512);//设置输出缓冲区的大小; m_ComPort.SetInputMode(1); //设置输入方式为二进制方式; m_ComPort.SetSettings("9600,n,8,1");//设置波特率等参数; m_ComPort.SetRThreshold(1);//设置为每接收一个字符就触发一个OnComm 事件; m_ComPort.SetInputLen(0); //设置为0时,程序将读取缓冲区的全部字符; if(!m_ComPort.GetPortOpen()) //打开串口; m_ComPort.SetPortOpen(TRUE); 摘要 由于计算机技术的迅猛发展,使得基于内容的视频信息的存取、操作和检索不仅成为一种可能,更成为一种需要。同时,基于内容的视频编码标准MPEG-4和基于内容的视频描述标准MPEG-7正在发展和完善。因此提取和视频中具有语义的运动目标是一个急需解决的问题。运动目标提取和检测作为视频和图像处理领域的重要研究领域,有很强的研究和应用价值。运动检测就是将运动目标从含有背景的图像中分离出来,如果仅仅依靠一种检测算法,难以从复杂的自然图像序列中完整地检测出运动的目标。较高的检测精度和效率十分重要,因此融合多种检测方法的研究越来越受到重视。本文介绍了几种国内外文献中的经典的视频运动目标的检测和提取算法,并对各种方法进行了评价和总结。首先介绍了基本的运动目标检测的基本知识和理论,然后介绍了基本的几种目标检测方法及其各种改进方法。对今后的运动目标检测提取的相关研究提供一定的参考。 关键词:运动目标检测光流法帧差法背景建模方法 ABSTRACT Because of the rapid development of computer technology, it is possible to access, operate and retrieve the video information based on the content of the video. At the same time, based on the content of the video coding standard MPEG-4 and content-based video description standard MPEG-7 is developing and improving. Therefore, it is an urgent problem to be solved in the extraction and video. Moving object extraction and detection is a very important field of video and image processing, and has a strong research and application value. Motion detection is to separate moving objects from the image containing background, if only rely on a detection algorithm, it is difficult to from a complex natural image sequences to detect moving target. Higher detection accuracy and efficiency are very important, so the study of the fusion of multiple detection methods is becoming more and more important. In this paper, the detection and extraction algorithms of the classical video moving objects in the domestic and foreign literatures are introduced, and the methods are evaluated and summarized. Firstly, the basic knowledge and theory of basic moving target detection is introduced, and then the basic method of target detection is introduced. To provide a reference for the research on the extraction of moving target detection in the future. Keywords: Visual tracking Optical flow method Frame Difference Background modeling method 运动检测(移动侦测)原理 一、引言 随着技术的飞速发展,人们对闭路电视监控系统的要求越来越高,智能化在监控领域也得到越来越多的应用。在某些监控的场所对安全性要求比较高,需要对运动的物体进行及时的检测和跟踪,因此我们需要一些精确的图像检测技术来提供自动报警和目标检测。运动检测作为在安防智能化应用最早的领域,它的技术发展和应用前景都受到关注。 运动检测是指在指定区域能识别图像的变化,检测运动物体的存在并避免由光线变化带来的干扰。但是如何从实时的序列图像中将变化区域从背景图像中提取出来,还要考虑运动区域的有效分割对于目标分类、跟踪等后期处理是非常重要的,因为以后的处理过程仅仅考虑图像中对应于运动区域的像素。然而,由于背景图像的动态变化,如天气、光照、影子及混乱干扰等的影响,使得运动检测成为一项相当困难的工作。 二、运动检测(移动侦测)原理 早期的运动检测如MPEG1是对编码后产生的I帧进行比较分析,通过视频帧的比较来检测图像变化是一种可行的途径。原理如下:MPEG1视频流由三类编码帧组成,它们分别是:关键帧(I 帧),预测帧(P帧)和内插双向帧(B帧)。I帧按JPEG标准编码,独立于其他编码帧,它是MPEG1视频流中唯一可存取的帧,每12帧出现一次。截取连续的I帧,经过解码运算,以帧为单位连续存放在内存的缓冲区中,再利用函数在缓冲区中将连续的两帧转化为位图形式,存放在另外的内存空间以作比较之用,至 于比较的方法有多种。此方法是对编码后的数据进行处理,而目前的MPEG1/MPEG4编码都是有损压缩,对比原有的图像肯定存在误报和不准确的现象。 目前几种常用的方法: 1.背景减除(Background Subtraction ) 背景减除方法是目前运动检测中最常用的一种方法,它是利用当前图像与背景图像的差分来检测出运动区域的一种技术。它一般能够提供最完全的特征数据,但对于动态场景的变化,如光照和外来无关事件的干扰等特别敏感。最简单的背景模型是时间平均图像,大部分的研究人员目前都致力于开发不同的背景模型,以期减少动态场景变化对于运动分割的影响。 2.时间差分(Temporal Difference ) 时间差分(又称相邻帧差)方法是在连续的图像序列中两个或三个相邻帧间采用基于像素的时间差分并且阈值化来提取出图像中的运动区域。时间差分运动检测方法对于动态环境具有较强的自适应性,但一般不能完全提取出所有相关的特征像素点,在运动实体内部容易产生空洞现象。 3.光流(Optical Flow) 基于光流方法的运动检测采用了运动目标随时间变化的光流特性,如Meyer[2] 等通过计算位移向量光流场来初始化基于轮廓的跟踪算法,从而有效地提取和跟踪运动目标。该方法的优点是在摄像机运动存在的前提下也能检测出独立的运动目标。然而, 第38卷 第2期2004年2月 西 安 交 通 大 学 学 报 J OU RNAL OF XI′AN J IAO TON G UN IV ERSIT Y Vol.38 №2 Feb.2004基于线性搜索的快速运动估计算法 丁贵广,郭宝龙 (西安电子科技大学机电工程学院,710071,西安) 摘要:为了减小快速运动估计算法的计算复杂度和提高运动补偿的准确性,提出了一种新的块匹配运动估计算法,称为线性正方形搜索算法.该算法采用运动估计的线性搜索策略,对于不重要的搜索区域利用线性搜索技术进行快速搜索以减小算法的计算复杂度,而对于重要搜索区域,即最佳点所在区域,用9点的正方形模块进行精细搜索以提高算法的搜索精度.实验结果证明,该算法与菱形算法相比不仅计算复杂度减小了10%以上,而且视频编码效率可以提高约011dB. 关键词:块匹配算法;运动估计;线性搜索;视频编码 中图分类号:TP391 文献标识码:A 文章编号:0253-987X(2004)02-0136-04 N e w F ast Motion Estimation Algorithm B ased on Line Search Di ng Guiguang,Guo B aolong (School of Electromechanical Engineering,Xidian University,Xi′an710071,China) Abstract:In order to reduce the computational complexity of the fast motion estimation and improve the accuracy of motion compensation,a new block2matching algorithm called line2square search(L SS)algorithm was pro2 posed,in which the strategy of the line search was introduced.The L SS algorithm performed the line search for the unimportant area to reduce the computation complexity.For the important search area in which optimal points were existed,a square search pattern consisted of9checking points was used to carry out the refined search,thus the search accuracy and the prediction quality were https://www.360docs.net/doc/9c2141468.html,pared with the diamond search algorithm,experimental results showed that the computational complexity could be reduced up to10%and the coding efficiency could be increased about011dB by the L SS algorithm. K eyw ords:block2m atchi ng al gorithm;motion esti m ation;li ne search;vi deo codi ng 对于视频序列图像,由于相邻帧之间存在很大的时间相关性,即时间冗余,所以通过减少时间冗余,可以大幅度提高视频编码的效率.基于块匹配的运动估计算法是一种有效的方法,它已经被许多视频编码标准所采纳[1,2].在块匹配运动估计算法中,全搜索(FS)算法精度最高,但由于它要对搜索区内的每个搜索点进行检测,因此计算复杂度高,软硬件实现困难.后来人们相继提出了许多快速搜索算法,如三步法(TSS)[3]、四步法(FSS)[4]、二维对数法(TDL)[5]、基于块的梯度下降法(BB G DS)[6]、交叉法(CS)[7]和菱形法(DS)[8,9\〗等,它们通过设计不同的搜索模板和搜索策略,在计算复杂度上比FS 减小了许多,但搜索的准确性比不上FS.因此,有必要寻找更加高效的块匹配运动估计算法. 本文在分析运动矢量和绝对差和(Sum of Ab2 solute Difference,SAD)的空间分布特性的基础上,设计了一种新的搜索算法———线性正方形搜索算法(Line2Square Search,L SS).实验结果表明,本文提出的L SS算法在计算复杂度和准确性上都明显优于DS等块匹配算法. 收稿日期:2003-05-05. 作者简介:丁贵广(1976~),男,博士生;郭宝龙(联系人),男,教授,博士生导师. 基金项目:国家自然科学基金资助项目(69975015);教育部优秀青年教师计划资助项目. 数字视频处理实验报告 学院:通信与信息工程学院 系班:电信科0901班 姓名: 学号: 时间:2012 年11月23号 一、实验名称:基于块的全搜索运动估计算法实现 二、实验目的: 1、掌握运动估计算法的实现原理。 2、掌握运动估计算法的研究现状及多种计算方法。 3、学习基于块的全搜索运动估计算法,研究分析其Matlab实现 程序过程,并补充完成程序,对实验结果进行分析比较。 三、实验要求 三、实验要求 1、对实验程序motionEstAnalysis.m进行分析,完成主程序流程图。 函数流程图: 2、编写补充完成部分不全程序代码,调试程序使其能正确运行 (1) motionEstES( ) % Computes motion vectors using exhaustive search method(全搜索法计算运动矢量) % % Input % imgP : The image for which we want to find motion vectors(当前图像) % imgI : The reference image(参考图像) % mbSize : Size of the macroblock(宏块尺寸) % p : Search parameter (read literature to find what this means)(搜索参数) % % Ouput % motionVect : the motion vectors for each integral macroblock in imgP (当前图像中每一个积分宏块的运动矢量) % EScomputations: The average number of points searched for a macroblock(每个宏块搜索的平均点数) % % Written by Aroh Barjatya 数字视频实验报告 班级:电信科0801班 学号: 姓名: 实验报告二 一、实验名称:视频信号的运动估计和运动补偿算法 二、实验目的 在视频编码和处理系统中,运动估计和运动补偿技术对降低视频序列时间冗余度、提高编码效率起着非常关键的作用。运动估计的准确程度将直接决定视频编码器的编码效率。它极大地消除了视频序列的帧间相关性。运动估计算法的复杂性将直接决定视频压缩编码系统的复杂性,如何提高运动估计的效率,使运动估计算法的搜索过程更快速、更高效一直是人们研究的热点。掌握运动估计的块匹配算法,以及快速运动估计算法。 三、实验内容: 1、分析基于块匹配的全搜索运动估计算法程序,画出 motionEstAnalysis.m 和 motionEstES.m文件流程图 2、编程补充完成costFuncMAD.m 文件中最小绝对误差计算函数 costFuncMAD()和imgPSNR.m文件中峰值信噪比PSNR计算函数imgPSNR()的程序,最终输出运动矢量场; 3、掌握运动补偿算法,编程实现motionComp.m文件中对目标帧的运 动补偿重构函数 motionComp(); 4、了解多种快速运动估计算法,例如三步法搜索法、二维对数法、 菱形搜索法等。 5、总结实验结果,比较各种搜索算法的性能和所需时间。 四、实验原理 在帧间预测编码中,由于活动图像邻近帧中的景物存在着一定的相关性。因此,可将活动图像分成若干块或宏块,并设法搜索出每个块或宏块在邻近帧图像中的位置,并得出两者之间的空间位置的相对偏移量,得到的相对偏移量就是通常所指的运动矢量,得到运动矢量的过程被称为运动估计。 运动矢量和经过运动匹配后得到的预测误差共同发送到解码端,在解码端按照运动矢量指明的位置,从已经解码的邻近参考帧图像中找到相应的块或宏块,和预测误差相加后就得到了块或宏块在当前帧中的位置。 运动估计的准确程度往往用补偿图像与原图像比较的PSNR来衡量表示。 五、实验程序 1、motionEstAnalysis.m文件流程图 课程设计任务书 学生姓名:专业班级: 指导教师:工作单位: 题目: 运动估计算法 初始条件: MATLAB软件平台 要求完成的主要任务: 1.设计任务 设计视频压缩系统中的运动估计算法:全搜索法(FS: Full Search)和三步法(TSS: Three Step Search),比较二种方法的搜索点和每帧的峰值信噪比(PSNR:peak signal to noise ratio) 2.设计要求 编制算法代码;对视频进行运动估计;计算PSNR 时间安排: 答辩时间2013年1月24日。 指导教师签名:年月日 系主任签名:年月日 摘要 (1) 1运动估计算法概念 (2) 1.1 运功估计算法基本思想 (2) 1.2 运动估计算法实验原理 (2) 2 设计原理和方法 (3) 2.1 三步法 (3) 2.2 新三步法 (3) 2.3 全搜索法 (4) 2.4 峰值信噪比 (5) 3 运动估计算法的MATLAB编程 (6) 3.1全搜索法 (6) 3.2三步法 (9) 3.3全搜索法指标 (11) 3.4三步法指标 (11) 3.4仿真结果分析 (11) 4 小结与体会 (11) 参考文献 (11) 附录 (12) 运动估计的基本思想是尽可能准确地获得序列图像帧间的运动位移,即运动 矢量。因为运动估计越准确,预测补偿的图像质量越高,补偿的残差就越小,补偿编码所需位数越少,需要传输的比特率就越小。利用得到的运动矢量在帧间进行运动补偿。补偿残差经过变换、量化、编码后与运动矢量一起经过熵编码,然后以比特流形式发送出去。 在视频编码和处理系统中,运动估计和运动补偿技术对降低视频序列时间冗余度、提高编码效率起着非常关键的作用。运动估计的准确程度将直接决定视频 编码器的编码效率。 关键词:运动估计、运动补偿技术、位移(运动)矢量 Abstract The basic idea is that the motion estimation as accurate as possible the image sequence interframe motion displacement, i.e. the motion vector. Motion estimation more accurate prediction compensation, the higher the image quality is compensated residuals is smaller, less compensation coding bits required, the smaller the transmission bit rate. Performing motion compensation using the motion vector obtained in the interframe. Compensation residuals through transformation, quantization, entropy-coded together with the motion vector is encoded, and then sent out in the form of a bit stream. In video coding and processing system, the motion estimation and motion compensation to reduce the temporal redundancy of video sequence to improve the coding efficiency plays a crucial role. The degree of accuracy of the motion estimation will directly determine the encoding efficiency of the video encoder. Keywords:Motion estimation Motion compensation techniques The vector of displacement (movement) 视频图像中运动目标检测 毕业论文 题目视频图像中运动目标检测 方法研究 专业电气工程及其自动化 班级电气1003 学生曹文 学号20113024543 指导教师赵哥君 二〇一二年六月八日 摘要 在很多现代化领域,运动目标检测都显示出了其重要的作用。尤其是近二十年的社会经济的飞速发展,运动目标检测都彰显了其重要性,在航空、通信、航海等各个方面都有关键性的作用,从而使运动目标检测方法的研究成为各国的研究热门课题。 通过阅读大量的相关论文、期刊及其网络资源,了解了高斯背景建模及背景更新的基本原理及思想。在本文中,首先介绍了运动目标检测方法的相关基础知识,如图像的二值化、图像的形态学处理、颜色空间模型。然后重点说明了三种常用的运动目标检测方法的研究,简要阐述了三种研究方法的基本思想。在老师的帮助下进行了相应的实验,最终得出了三种运动目标检测方法的优点和缺点,着重探究了高斯背景建模及其背景更新基本原理及思想。 最后,通过相关的程序及软件对混合高斯背景模型进行了相关的实验,进而发现了混合高斯背景建模算法存在的不足之处,如:高斯背景建模的计算量大、运动目标较大时检测效果差等问题,并对对这些问题提出了相关设想及改进。 关键词:运动目标检测;二值化;图像的形态学处理;高斯背景建模;背景更新 I ABSTRACT In many modern fields, moving target detection are showing its important role. Especially nearly twenty years of rapid development of social economy, the moving target detection has shown its importance, in various aviation, communication, navigation and so on have a key role, so the study of moving target detection method has become a research hot topic in countries. By reading relevant papers, a large number of journals and cyber source, understand the basic principle and thought of Gauss background modeling and updating the background. In this paper, firstly introduces the basic knowledge of moving target detection method, such as the two values image, morphological image processing, color space model. Then focus on the study of three methods used for moving object detection, a brief description of the basic ideas of the three kinds of research methods. By the experiment, the results of three kinds of method of moving target detection has advantages and disadvantages, this paper emphatically explores Gauss background modeling and background updating basic principle and thought. Finally, through the program and software related to mixed Gauss background model for the relevant experiments, and found the shortcomings, the presence of mixed Gauss background modeling algorithm such as: the problem of computing Gauss background modeling, moving target volume larger detection effect is poor, and on these problems put forward relevant ideas and improvement. Keywords: moving object detection; two values; I I视频监控中运动目标自动提取技术
运动目标检测光流法
运动估计算法比较
运动估计算法简述
基于matlab的运动目标检测
运动序列目标检测算法研究及 DSP 实现
GPS运动目标提取及轨迹呈现
运动目标检测方法总结报告
运动目标检测原理
基于线性搜索的快速运动估计算法
基于块的全搜索运动估计算法实现实验报告
视频信号的运动估计和运动补偿算法
运动估计算法MATLAB课程设计
视频图像中运动目标检测