基于遗传算法的感应电动机稳态模型参数辨识

感应电动机参数离线辨识方法实验研究_王高林
中图分类号:T M346 文献标志码:A 文章编号:100126848(2009)0620004204 感应电动机参数离线辨识方法实验研究 王高林,商 振,于 泳,徐殿国 (哈尔滨工业大学,哈尔滨 150001) 摘 要:为进一步提高感应电机矢量调速系统的性能,介绍了一种改进的参数离线辨识方案。系统通过自动进行直流实验、单相交流实验和空载实验来辨识感应电机的参数。所提出的改进方案可以有效消除集肤效应和死区效应所产生的辨识误差。对方案进行了详细分析,介绍了具体实现过程;最后将这种参数辨识方法应用到11k W 感应电机矢量控制系统。实验结果验证了方案的有效性。 关键词:参数辨识;离线;感应电动机;集肤效应;死区效应;实验 Research on O ff 2li n e Param eter I den ti f i ca ti on for I nducti on M otor WANG Gao 2lin,SHANG Zhen,Y U Yong,XU D ian 2guo (Harbin I nstitute of Technol ogy,Harbin 150001,China ) Abstract:Pr oposed an i m p r oved inducti on mot or off 2line para meter identificati on sche me f or vect or con 2tr olled AC mot or drives . The inverter drives aut omatically perf or med the DC test,the single 2phase test, and the no 2l oad test t o calculate all the machine para meters during self 2comm issi oning peri od .The p r o 2 posed sche me can eli m inate the para meter identificati on err or due t o the skin and dead 2ti m e effects . I n 2 tr oduced the scheme p rinci p le and the i m p le ment method in detail .Experi m ental results de monstrated the feasibility of the para meter identificati on method in 11k W vect or contr olled inducti on mot or drive sys 2 te m. Key W ords:Para meter identificati on;Off 2line;I nducti on mot or;Skin effect;Dead 2ti m e effect;Ex 2peri m ent 收稿日期:2008209217 0 引 言 在感应电机矢量控制系统中,电机参数的准确性影响到磁链估计以及控制参数调节等重要环节,因此电机参数辨识对于高性能调速系统具有重要的意义 [1] 。对于高性能感应电机矢量控制型 变频器,产品要求具有参数离线自学习的功能,需要在电机运行之前对参数进行离线辨识。离线辨识获得的电机参数将有助于矢量控制调速系统的正常运行,同时也可以对参数在线辨识的收敛性起参考作用。实际应用中,通常需要辨识的电机等效电路参数包括定、转子电阻和漏感以及互感等参数,目前已经有很多文献对其进行了深入研究 [224] 。本文介绍一种只需要通过检测电流信号 无需其它附加电路的电机参数离线辨识方法。由于逆变器中死区时间、开关管开关延迟时间和管 压降的存在,使得加在绕组电压的参考值与实际值存在一定差别,如不对这些因素进行考虑,将会引起辨识误差,本文采取了有效措施对其进行消除。另外,在单相交流实验过程中,考虑了集肤效应对转子电阻辨识的影响。 1 等效模型 假设感应电机工作在励磁特性的线性区,其数学模型可以用矢量的方式来表示: u s =R s i s +(L m +L σs ) d i s d t +L m d i r d t 0=R r i r +L m d i s d t +(L m +L σr )d i r d t + j p ωr [L m i s +(L m +L σr )i r ](1) 式中,u s 为定子电压矢量;i s 和i r 分别为定、转子电流矢量;R s 和R r 分别为定、转子电阻;L σs 和 L σr 分别为定、转子漏电感;L m 为定转子互感;p 为电机极对数;j 为复数虚部单位。 ? 4?
三相异步电动机型号参数表
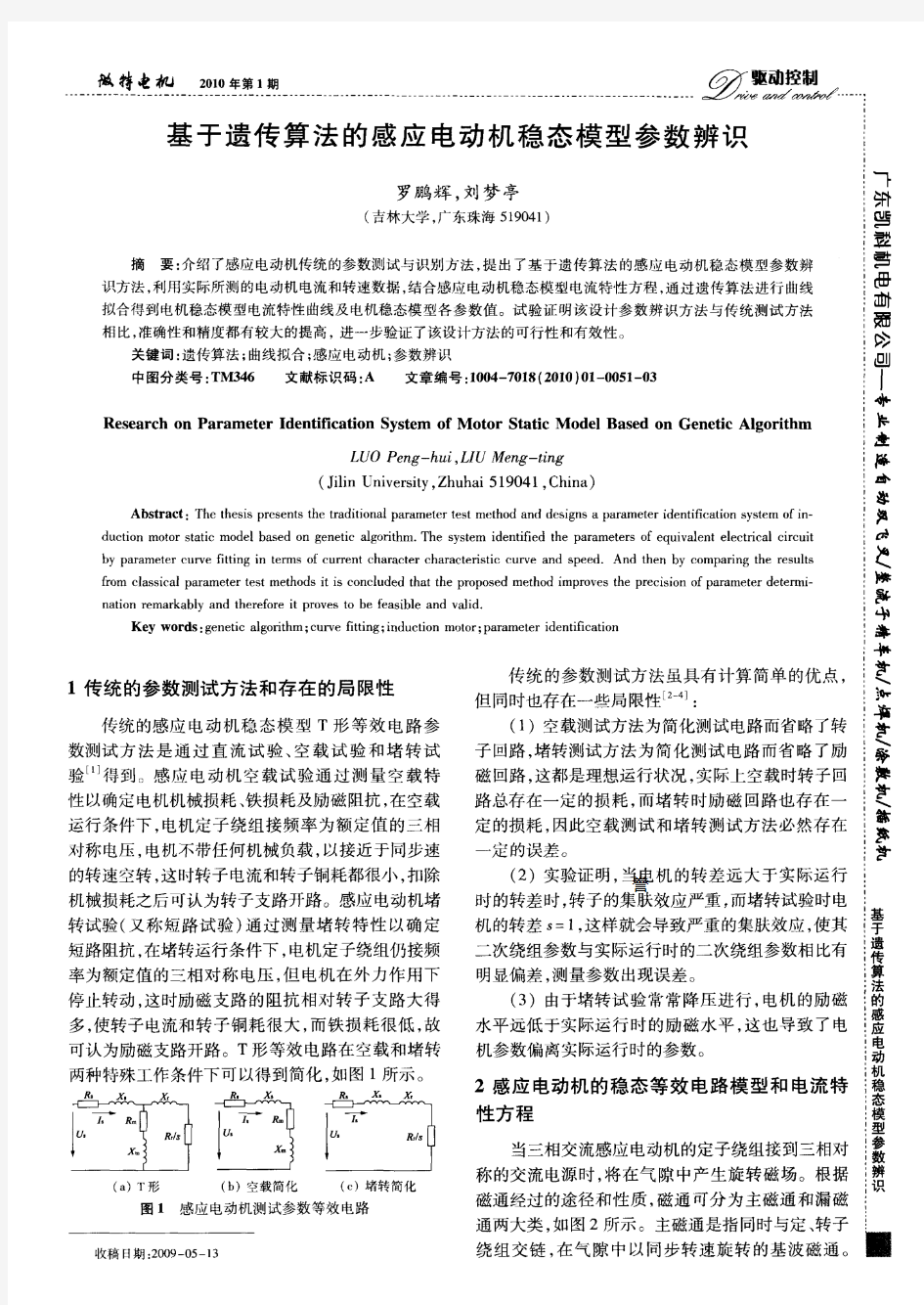
三相异步电动机型号参数表 Y2系列电动机是Y系列电机的更新换代产品,是一般用途的全封闭自扇冷式鼠笼型三相异步电动机。该产品应用于国民经济各个领域,如机床、水泵、风机、压缩机,也可适用于运输、搅拌、印刷、农机、食品等各类不含易燃、易爆或腐蚀性气体的场合。 Y2系列电机的安装尺寸和功率等级符合IEC标准,其外壳防护等级为IP54,冷却方法为IC41l,连续工作制(S1)。 采用F级绝缘,温升按B级考核(除315L2-2、4,355全部规格按F级考核外),并要求考核负载噪声指标。 Y2系列电动机额定电压为380V,额定频率为50Hz。电动机运行地点的海拔不超过1000m;环境空气温度随季节变化,但不超过40℃;最低环境空气温度为-15℃;最湿月月平均最高相对湿度为90%;同时该月月平均最低温度不高于25℃。 Y2系列电动机有两种设计,一种是适用于一般机械配套和出口需要,在轻载时有较高效率,在实际运行中有较佳节能效果,且具有较高堵转转矩,此设计称为Y2-Y系列。中心高63~355mm,功率从0.12~315kW。电动机符合JB/T8680.1-1998 Y2系列(1P54)三相异步电动机(机座号63~355)技术条件。 型号含义:如Y2-200L1-2Y:“Y2”表示异步电动机第二次改型设计,“200”表示中心高,“L”表示机座长短号,“1”表示铁心长度序号,“2”表示极数,“Y”表示第一种设计。第2种设计是满载时有较高效率,更适用于长期运行和负载率较高的使用场合,如水泵、风机配套,此设计称为Y2-E系列,中心高80~280mm,功率从0.55~90kW。电动机符合 JB/T8680.2-1998 Y2系列(1P54)三相异步电动机(机座号80~280)技术条件。 型号含义:如Y2-200L2-6E:“Y2”表示异步电动机第二次改型设计,“200”表示中心高,“L”表示机座长短号,“2”表示铁心长度序号,“6”表示极数,“E”表示第二种设计。 Y2系列电动机机座外轮廓呈四方形兼圆形,散热片呈垂直,水平平行分布,全部采用铸铁结构。另外H63~112还兼有铝合金压铸结构。 本系列电动机采用浅端盖结构,增加了内部加强筋的数量和尺寸,全部采用铸铁结构,另外H63~112还兼有铝合金压铸结构。为方便用户使用和检修,H180及以上增设了不停机的注油装置。 接线盒防护等级为IP55。为了减轻电机重量,H63~280接线盒用铝合金压铸(也可用铸铁件),H315~355使用铸铁件。且盒内设有专用的接地装置,H160及以上机座考虑有热保护装置的安装位置,电源进线孔采用双孔进线,并有两种密封结构:一种为加密封盖,另一种为锁紧密封。接线盒一般位于机座顶部,并可以四面出线,另外H80~355铸铁机座的接 1
等效电路模型参数在线辨识
第四章 等效电路模型参数在线辨识 通过第三章函数拟合的方法可以确定钒电池等效电路模型中的参数,但是在实际运行过程中模型参数随着工作环境温度、充放电循环次数、SOC 等因素发生变化,根据离线试验数据计算得到的参数值估算电池SOC 可能会造成较大的估计误差。因此,在实际运行时,应对钒电池等效电路模型参数进行在线辨识,做出实时修正,提高基于模型估算SOC 的精度。 4.1 基于遗忘因子的最小二乘算法 参数辨识是根据被测系统的输入输出来,通过一定的算法,获得让模型输出值尽量接近系统实际输出值的模型参数估计值。根据能否实时辨识系统的模型参数,可以将常用的参数辨识方法分为离线和在线两类,离线辨识只能在数据采集完成后进行,不能对系统模型实时地在线调整参数,对于具有非线性特性的电池系统往往不能得到满意的辨识结果;在线辨识方法一般能够根据实时采集到的数据对系统模型进行辨识,在线调整系统模型参数。常用的辨识方法有最小二乘法、极大似然估计法和Kalman 滤波法等。因最小二乘法原理简明、收敛较快、容易理解和掌握、方便编程实现等特点,在进行电池模型参数辨识时采用了效果较好的含遗忘因子的递推最小二乘法。 4.1.1 批处理最小二乘法简介 假设被辨识的系统模型: 12121212()()()1n n n n b z b z b z y z G z u z a z a z a z ------+++==++++L L (4-1) 其相应的差分方程为: 1 1 ()()()n n i i i i y k a y k i b u k i ===--+-∑∑(4-2) 若考虑被辨识系统或观测信息中含有噪声,则被辨识模型式(4-2)可改写为: 1 1 ()()()()n n i i i i z k a y k i b u k i v k ===--+-+∑∑(4-3) 式中, ()z k 为系统输出量的第k 次观测值;()y k 为系统输出量的第k 次真值,()y k i -为系统输出量的第k i -次真值;()u k 为系统的第k 个输入值,()u k i -为 系统的第k i -个输入值;()v k 为均值为0的随机噪声。
浅析电力系统模型参数辨识
浅析电力系统模型参数辨识 (贵哥提供) 一、现状分析 随着我国电力事业的迅猛发展, 超高压输电线路和大容量机组的相继投入, 对电力系统稳定计算、以及其安全性、经济性和电能质量提出了更高的要求。现代控制理论、计算机技术、现代应用数学等新理论、新方法在电力系统的应用,正在促使电力工业这一传统产业迅速走向高科技化。 我国大区域电网的互联使网络结构更复杂,对电力系统安全稳定分析提出了更高的要求,在线、实时、精确的辨识电力系统模型参数变得更加紧迫。由于电力系统模型的基础性、重要性,国外早在上世纪三十年代就开始了这方面的分析研究,[1,2]国内外的电力工作者在模型参数辨识方面做了大量的研究工作。[3]随后IEEE相继公布了有关四大参数的数学模型。1990年全国电网会议上的调查确定了模型参数的地位,促进了模型参数辨识的进一步发展,并提出了研究发电机、励磁、调速系统、负荷等元件的动态特性和理论模型,以及元件在极端运行环境下的动态特性和参数辨识的要求。但传统的测量手段,限制了在线实时辨识方法的实现。 同步相量测量技术的出现和WAMS系统的研究与应用,使实现在线实时的电力系统模型参数辨识成为可能。同步相量是以标准时间信号GPS作为同步的基准,通过对采样数据计算而得的相量。相量测量装置是进行同步相量测量和输出以及动态记录的装置。PMU的核心特征包括基于标准时钟信号的同步相量测量、失去标准时钟信号的授时能力、PMU与主站之间能够实时通信并遵循有关通信协议。 自1988年Virginia Tech研制出首个PMU装置以来,[4]PMU技术取得了长足发展,并在国内外得到了广泛应用。截至2006年底,在我国范围内,已有300多台P MU装置投入运行,并且可预计,在不久的将来PMU装置会遍布电力系统的各个主要电厂和变电站。这为基于PMU的各种应用提供了良好的条件。 二、系统辨识的概念 系统模型是实际系统本质的简化描述。[5]模型可分为物理模型和数学模型两大类。物理模型是根据相似原理构成的一种物理模拟,通过模型试验来研究系统的
三相异步电动机的参数测定
实验报告
图2-1 三相异步电动机参数测定接线图 (2)利用调压电源改变供给异步电动机的电源,异步电动机连接成Y 形,即将U 、V 、W (A 、B 、C )各接A 、B 、C 三相宫电线,X 、Y 、Z 接在一起。 (3)当施加电压从零逐渐增加,达到某值时,电机开始启动,然后逐渐增加电压到额定电压。测量其空载转速,观察其方向,再降低电压,使电机停下来。 (4)将三相交流供电线任意两相交换,再逐渐增加电压,观察电动机的转向,理解电源相序变化对电机转向的影响。 2. 参数测定 测量定子绕组的冷态直流电组,用数字万用表测量三个定子绕组1r 值, 娶妻平均数,即得冷态电阻。至于异步电动机的参数12 12,,,,,m m x x x r r r '',可用空载和短路实验来测定。下面主要作这两个实验。 (1). 空载实验 a.按照图3-1接线。电机绕组为Y 接(U N =220V )。负载与电机脱开,即不加负载。 b.把交流调压器的电压调至最小位置,接通电源,逐渐升高电压,是电动机旋转,并注意电机的旋转方向。若电机的旋转方向不符合要求,则需改变任意两根输入线即可。 c.保持电机在额定电压下,空载运行数分钟,使电机的机械损耗达到稳
1 x由下列短路实验求得。励磁电阻: 2 3 Fe m P r I =,式中 Fe P为额定电压下的铁损耗,由图3-2确定。 图2-2 电机的铁损与机械损耗 即作出2 () P f U =曲线,在2H U时对应的,Fe mec mec P P P 。可取2 () P f U =的延长线与 纵轴的交点,线段OK的长度表示机械损耗 mec P。 由短路实验计算出短路参数: 短路阻抗K k k U Z I =;短路电阻: 2 3 k k k P R I =;短路电抗:22 k k k X Z R =-,式中 ,, k k k U I P分别是短路相电压、短路相电流、三相短路功率之和。 转子绕组的折合值为 21 k r R R '=-,定、转子漏电抗为 12 1 2k x x X ' =≈最后画出完整的三相异步电动机等效电路图,并填入相关参数。
异步电动机参数自辨识
参数自辨识——现代逆变器结构下感应电动机系统的新特征 介绍 在实际应用中,磁场定向(field-oriented )现代交流调速系统的突出优点只有在自运行过程中准确得到所连接系统的信息才能够完全发挥。在实际系统中,当变频器和电机不是一起销售的时候,电机的参数是不能够预先知道的。因此,在试车过程中,必须有一些特别的测量和测试步骤。因为磁场定向矢量控制结构的复杂性,因此控制器参数设定将是一个需要时间而且特别受训练的人员才能够胜任。 为了简化这个过程,,在文章中给出来了参数自辨识(self-commissioning )——现代控制系统一种新特征。在参数自辨识过程中,系统自己得到电机参数并且同时设置控制器参数。这些过程都是在静止状态下完成的。随后,用一个测试来得到电机的转动惯量。 在现代直流控制系统中,这些特性已经可以得到[1],但是对交流调速系统,或者更复杂的系统,参数自辨识的过程完全是新的。 文章中描述了PWM 逆变器结构下异步电动机参数自辨识过程。 1、驱动装置结构 系统由整流部分、电压源型逆变器(VSI )和鼠笼电动机(M )组成。微处理器控制逆变器,执行磁场定向控制并控制操作面板。电机的两相电流R i 和S i 需要被测量。A/D 部分在综合测量原则下工作以使在选定周期里能够得到信号的准确平均值。中间回路的直流电压d U 和电机转速需要另外测量。 自辨识过程可以在所有电压等级和所有类型的PWM 逆变器(thyristor 、GTO 、transistor )上实施。实验是在15KW 电机上进行,逆变器的开关频率为500Hz 。 图1 驱动装置结构
2、自辨识的过程 当逆变器连接到主回路和主电机上时,操作者可以启动参数自辨识程序。首先,系统通过交互界面模式要求操作者输入电机的额定电压、电流和频率。然后,系统调整各个测量通道的偏移量(offset ),系统测量A/D 转换模块和逆变器及电机控制所必须的其他部分的功能,故障(如缺中断信号)会被准确检测到。这样,可以避免更大的损坏并且简化维修。 电机电流的测量通道和和逆变器本身只有在电子管被触发并且有电流流过时才可能。在操作者给予授权之前,这个测试是不能进行的。 当第二阶段测试正确执行以后,电机的参数(定子和转子电阻、总漏感L σ、转子时间常数)被确定。参数测量程序在几秒钟内完成。 接着,控制参数将自动计算并且被设置。 在需要的情况下,参数自辨识程序可以在电机运行的情况下再进行测试,以确定驱动装置的机械参数。 所有的参数被保存在非易失性存储器中,以便它们在下次启动时候可以立即调用。 3、异步电动机的数学模型 经过常规的近似以后,方程(1)可以用来描述鼠笼电机的电磁特性。 12 2111121121222222221010100010m a a a m m m R R T i L i u R R i L i T u R T R T σβσββααββωωψψωψψω??--?????????????---?????????????????=+????????--??????????????????????-???? (1) 符号表 12,R R 定子电阻、*变换后转子电阻; 11,u u αβ 两相坐标系下的定子电压; 11,i i αβ 两相坐标系下的定子电流; 22,αβψψ *变换后的转子磁链; m ω 单极对数下的电角速度; L σ 总漏感; 2L *变换后的转子电抗; 222 L T R = 转子时间常数
三相异步电动机型号说明
三相异步电动机型号字母表示的含义 J——异步电动机; O——封闭; L——铝线缠组; W——户外; Z——冶金起重; Q——高起动转轮; D——多速; B——防爆; R一绕线式; S——双鼠笼; K一—高速; H——高转差率。 电磁滑差调速电机型号字母表示的含义 YCT系列电磁调调速三相异步电动机是一种交流恒转矩无级调速电动机。其调速特点是调速范围大、无失控区、起动力矩大、可以强励起动,频繁起动时,对电网无冲击。适用于纺织、化工、治金、建材、食品、矿山等部门,如,可用于油漆流水线、装配流水线的的传输带、注塑料机、印刷机、印染机、空调设备、输送设备等。 型号含意 YD系列变极多速三相异步电动机是一般用途的全封闭自扇冷式鼠笼型节能电动机,是Y系列(IP44)三相异步电动机的主要派生系列之一 型号说明
产品型号由产品代号、规格代号、特殊环境代号和补充代号等四个部分组成。它们 的排列顺序为:产品代号—规格代号—特殊环境代号—补充代号。 一、产品代号:由电机类型代号、电机特点代号、设计序号和励磁方式代号等四个 小节顺序组成。 1,类型代号是表征电机的各种类型而采用的汉语拼音字母。 比如:异步电动机Y 同步电动机T 同步发电机TF 直流电动机Z 直流发电机ZF 2,特点代号是表征电机的性能、结构或用途,也采用汉语拼音字母表示 比如:隔爆型用B表示YB轴流通风机上用YT 电磁制动式YEJ变频调速式YVP 变极多速式YD 起重机用YZD等 3.设计序号是指电机产品设计的顺序,用阿拉伯数字表示。对于第一次设计的产品不标注设计序号, 对系列产品所派生的产品按设计的顺序标注。比如:Y2 YB2 4励磁方式代号分别用字母表示,S表示三次谐波,J表示晶闸管,X表示相复励磁 二.规格代号主要用中心高、机座长度、铁心长度、极数来表示。 1,中心高指由电机轴心到机座底角面的高度;根据中心高的不同可以将电机分为大型、中型、小型和微型四种,其中中心高 H在45mm~71mm的属于微型电动机; H在80mm~315mm的属于小型电动机; H在355mm~630mm的属于中型电动机; H在630mm以上属于大型电动机。 2. 机座长度用国际通用字母表示:S——短机座 M——中机座 L——长机座 3,铁心长度用阿拉伯数字1、2、3、4、、、由长至短分别表示 4,极数分2极、4极、6极、8极等。 三,特殊环境代号有如下规定: 特殊环境 代号 “高”原用 G 船(“海”)用 H
三相异步电机参数的测试
三相异步电机参数的测试 0 引言 在异步电机的矢量控制系统中,电动机的参数是十分重要的物理量。在电机学中利用电动机的参数构成等值电路,以此为基础可以对三相电动机的各种运行特性进行分析。变频调速中采用的矢量控制,控制系统性能完全依赖于所使用的电机参数的准确程度,如果参数不准确,将直接导致矢量控制性能指标下降,甚至导致变频器不能正常工作。 三相异步电动机的基本参数包括定子电阻、定子漏感、转子电阻、转子漏感、定转子互感。这些参数的确定,可以利用电机设计制造时的技术数据进行理论计算,但计算复杂,并且与实际有较大误差;也可以采用试验方法确定,下面具体介绍在变频器中采用试验的方法对各参数的测试。 1 参数测定试验 在变频器中,测试参数主要有两种方法:一种是在线测试,一种是离线测试。在线测试方法主要有卡尔曼滤波法、模型参考自适应法、滑模变结构法等,这些方法要求处理器具有较高的处理速度,对系统硬件要求较高;离线测试方法主要有频率响应试验、阶跃响应试验等,但测试精度不高,存在计算复杂、程序计算量大等问题,故很少采用。 这里主要介绍根据传统的电机学试验原理,在变频器中对电机参数进行离线测试,通过对其采取相应的措施达到测试参数的高精确度。 1.1 采用直流伏安法测试电机的定子电阻 在变频器系统中,采用直流伏安法测试定子电阻的关键是如何得到低压直流电源,当变频器直接连接到电网时,其直流母线电压较高,通常的办法是对直流母线进行电压斩波控制,得到一个平均值很低、周期固定且占空比固定的高频电压脉冲系列,这样经过定子绕组中的电感滤波后,就得到一个脉动很小的直流电流。如果占空比
为D,直流母线电压为Udc,电流为I,则相应的定子电阻值为 在测试中为了防止变频器出现过电流,应该正确考虑占空比的设定,在实际测试中可以采用电流闭环加PI 调节器 得出占空比的方法控制电流大小,如图1 所示。 图1 中,I * 为控制目标,即给定电流,I 为反馈电流,即实际运行电流。试验时,变频器中的开关器件IGBT 的导通压降,对测试值的影响是不能忽略的,对导通压降补偿的正确与否直接影响到测试电阻精度的高低,导通压降除了IGBT的导通压降,还有续流二极管的导通压降。同时,由于IGBT在开通和关断过程中都有一定的延时,为了准确计算输出的直流电压,这部分延时也不能忽略。 1.2 利用堵转试验测试转子电阻及定转子漏感 在实际的应用中,对电机进行堵转比较困难,在此采用单相短路试验代替三相试验,当电机加上单相正弦电压时,没有电磁转矩产生,其电磁现象与三相堵转时基本相同,测试中,让电机的某一相开路,在另外两相之间通入单相的正弦交流电,然后通入一定的电流,此时测试定子上的电压,电流和输入功率,这样即可计算出电机的短路电阻和短路电抗。
(完整版)三相异步电动机的型号及选用
三相异步电动机的型号及选用 三相异步电动机的分类 三相异步电动一般为系列产品,其系列、品种、规格繁多,因而分类也较繁多。 1、按电动机尺寸大小分类 大型电动机:定子铁心外径D>1000mm或机座中心高H>630mm。 中型电动机:D=500~1000mm或H=355~630mm。 大型电动机:D=120~500mm或H=80~315mm。 2、按电动机外壳防护结构分类 3、按电动机冷方式分类 电动机按冷却方式可分为自冷式、自扇冷式、他扇冷式等。可参见国家标准GB/T1993-93《旋转电机冷却方式》。 4、按电动机的安装形式分类 IMB3:卧式,机座带底脚,端盖上无凸缘。 IMB5:卧式,机座不带底脚,端盖上有凸缘。 IMB35:卧式,机座带底脚,端盖上有凸缘。 5、按电动机运行工作制分类 S1;连续工作制 S2:短时工作制 S3~S8:周期性工作制 6、按转子结构形式分类 三相笼型异步电动机 三相绕线型异步电动机 三相异步电动机的型号及选用
我国电机产品型号的编制方法是按国家标准GB4831-84《电机产品型号编制方法》实施的,即有汉语拼音字母及国际通用符号和阿拉伯数字组成,按下列顺序排列。 1 产品(类型)代号 CHANPINGUI 异步电动机同步电动机同步发电机直流电动机直流发电机汽轮发电机水轮发电机测功机潜水电泵纺织用电机交流换向器电动机 产品代号 Y T TF Z ZF QF SF C Q F H 2 特殊环境代号 使用场合热带用湿热带用干燥带用高原用船用户外用化工防腐用 汉语拼音字母 T TH TA G H W F 产品规格代号:L-----长机座;M-----中机座;S-----短机座。 下面为两个产品举例: (1)三相异步电动机 Y2---132M---4 规格代号,中心高132mm,M中机座,4极 产品代号,异步电动机,第二次改型设计 (2)户外防腐型三相异步电动机 Y---100L2---4---WF1 特殊环境代号,W户外用,F化工防腐用,1中等防腐 规格代号,中心高100,长机座第二铁心长度,4极 产品代号,异步电动机 3 常用三相异步电动机产品型号、结构特点及应用场合 序号名称型号机座号与功率范围结构特点应用场合 新老 1 小型三相异步电动机(封闭式) Y2 (IP55) Y(IP44) JO2 JO H80~355
基于最小二乘模型的Bayes参数辨识方法
基于最小二乘模型的Bayes 参数辨识方法 王晓侃1,冯冬青2 1 郑州大学电气工程学院,郑州(450001) 2 郑州大学信息控制研究所,郑州(450001) E-mail :wxkbbg@https://www.360docs.net/doc/9f3754981.html, 摘 要:从辨识定义出发,首先介绍了Bayes 基本原理及其两种常用的方法,接着重点介绍了基于最小二乘模型的Bayes 参数辨识,最后以实例用MATLAB 进行仿真,得出理想的辨识结果。 关键词:辨识定义;Bayes 基本原理;Bayes 参数辨识 中国图书分类号:TP273+.1 文献标识码:A 0 概述 系统辨识是建模的一种方法。不同的学科领域,对应着不同的数学模型,从某种意义上讲,不同学科的发展过程就是建立它的数学模型的过程。建立数学模型有两种方法:即解析法和系统辨识。L. A. Zadehll 于1962年曾对”辨识”给出定义[1]:系统辨识是在对输入和输出观测的基础上,在指定的一类系统中,确定一个与被识别的系统等价的系统。一般系统输出y(n)通常用系统过去输出y(n-m)和现在输入u(n)及过去输入u(n-m)的函数描述 y(n)=f(y(n-1),y(n-2),...,y(n-m y ), u(n),u(n-1),... ,u(n-m u ))=f(x(n),n) x(n)=[y(n-1),y(n-2),...y(n-m y ), u(n),u(n-1),...,u(n-m u )]’ 这里f(,)为未知函数关系,一般情况为泛函数,可以是线性函数或非线性函数,分别对应于线性或非线性系统,通常这个函数未知,但是局部输入输出数据可以测出,系统辨识的任务就是根据这部分信息寻找确定函数或确定系统来逼近这个未知函数。但实际上我们不可能找到一个与实际系统完全等价的模型。从实用的角度来看,系统辨识就是从一组模型中选择一个模型,按照某种准则,使之能最好地拟合由系统的输入输出观测数据体现出的实际系统的动态或静态特性。接下来本文就以最小二乘法为基础的Bayes 辨识方法为例进行分析介绍并加以仿真[4]。 1 Bayes 基本原理 Bayes 辨识方法的基本思想是把所要估计的参数看做随机变量,然后设法通过观测与该参数有关联的其他变量,以此来推断这个参数。 设μ是描述某一动态系统的模型,θ是模型μ的参数,它会反映在该动态系统的输入输出观测值中。如果系统的输出变量z(k)在参数θ及其历史纪录(1) k D ?条件下的概率密度函 数是已知的,记作p(z(k)|θ,(1) k D ?),其中(1) k D ?表示(k-1)时刻以前的输入输出数据集 合,那么根据Bayes 的观点参数θ的估计问题可以看成是把参数θ当作具有某种先验概率密 度p (θ,(1) k D ?)的随机变量,如果输入u(k)是确定的变量,则利用Bayes 公式,把参数θ 的后验概率密度函数表示成[2] p (θ,k D )= p (θ|z (k ),u(k ), (1) k D ?)=p (θ|z (k ),(1) k D ?) = (k-1) (k-1) p(z(k)/,D )p(/D ) (k-1)(k-1)p(z(k)/,D )p(/D )d θθθθθ∞∫?∞ (1) 在式(1)中,参数θ的先验概率密度函数p(θ|(1) k D ?)及数据的条件概率密度函数p(z(k)|θ,
上海交大电机学实验+三相异步电动机参数及工作特性
电机学实验报告 实验三三相异步电动机参数及工作特性 一、实验目的 1.掌握三相异步电动机空载、堵转实验及参数计算的方法; 2.用实验的方法测定三相异步电动机的工作特性。 二、实验内容 1.三相异步电动机空载实验; 2.三相异步电动机堵转实验; 3.三相异步电动机负载实验。 三、实验接线图 下图3-1为三相异步电动机参数及工作特性实验的两种接线图,分别对应不同的实验台。本组所使用的7号实验台有磁粉制动器,所以实验实际所用的为图b的接线方式。 图3-1 三相异步电动机接线图 四、实验设备 1.T三相感应调压器额定容量10kV A,额定输入电压380V,额定输出电压0~430V, 额定输出电流13.4A; 2.M绕线转子三相异步电动机P N=3kW(R1=2Ω) U N=380V I N=7.1A n N=1390r/min; 3.G直流发电机3kW (或ZJ转矩传感器50N?m,CZ磁粉制动器50N?m); 4.R L单相变阻器8.8/108Ω 2/25A; 5.交流电压表500V; 6.交流电流表10A; 7.功率表500V 10A; 8.直流电压表400V; 9.直流电流表30A; 10.直流电流表4A; 11.张力控制器;
12.转矩转速显示仪。 五、实验数据 1.三相异步电动机空载实验: 0AB AB CA0A B C0???为三相输入功率 2.三相异步电动机堵转实验: 表3-2 三相异步电动机堵转实验数据温度θ=16℃ 0AB AB CA k A B C0???为三相输入功率3.三相异步电动机负载实验: 1A B C1???为负载时三相输入功率
六、特性曲线、参数计算及问题分析 1.根据空载实验数据绘出空载特性曲线U0=f(I0)、p0=f(U0)、cosφ0=f(U0)。其中,空载 功率因数为cosφ0 = p0 3U0I0 : 图3-2 三相异步电动机空载特性曲线U0=f(I0) 图3-3 三相异步电动机空载特性曲线p0=f(U0)
三相异步电动机的工作特性和参数测定
第8章三相异步电动机的工作特性和参数测定 原理简述 一、基本方程式和等效电路 异步电机定子绕组所产生的旋转磁场,以转差速度切割转子导体,在转子导体中感应电势,产生电流,转子导体中的电流与定子旋转磁场相互作用而产生电磁转矩,使转子旋转。当转子的 转速与定子旋转磁场的转速相等时,定、转子之间没有相对切割,转子中就没有电流,也就不能产生转矩。因此转子的转速一定要异于磁场的转速,故称异步电机。由于异步而产生的转 矩称为异步转矩。当时,为电动机运行;时为发电机运行;当即转子逆着磁场方向旋转时,它是制动运行。异步电机绝大多数都是作为电动机运行。其转矩和转速(转差率)曲线,如图8-1所示。 由《电机学》中可知,将转子边的量经过频率折算和绕组折算,可得到异步电机的基本方程式为: 式中转差率是异步电机的重要运行参数,为折算到定子一边的转子参数,也就是从定子上测得转子方面的数值。
由方程式可以画出相应的等效电路,如图8-2所示。 当异步电动机空载时,,。附加电阻。图8-2中转子回路相当 开路;当异步电动机堵转时,,,附加电阻,图8-2转子回路相当短路,这就和变压器完全相同。因此异步电机也可以通过空载实验和堵转(短路)实验来求出异步电机的等效电路中的各参数。 二、空载实验 由空载实验可以求得励磁参数,以及铁耗和机械损耗。实验是在转子轴上 不带任何机械负载,转速,电源频率的情况下进行的。用调压器改变试验电压 大小,使定子端电压从逐步下降到左右,每次记录电动机的端电压、 空载电流和空载功率,即可得到异步电动机的空载特性,如图8-3所示。 图 8-3 空载特性图 8-4 铁耗和机械耗分离 空载时,电动机的输入功率全部消耗在定子铜耗、铁耗和转子的机械损耗上。所以从空载功 率中减去定子铜耗,即得铁耗和机械耗之和,即 式中为定子绕组每相电阻值,可直接用双臂电桥测得。 机械损耗仅与转速有关而与端电压无关,因此在转速变化不大时,可以认为是常数。
负荷建模和参数辨识的遗传进化算法
ISSN 1000-0054CN 11-2223/N 清华大学学报(自然科学版)J T singh ua Un iv (Sci &Tech ),1999年第39卷第3期 1999,V o l.39,N o.311/34 37~40 负荷建模和参数辨识的遗传进化算法* 朱守真, 沈善德, 郑宇辉, 李 力, 艾 芊, 曲祖义 清华大学电机工程与应用电子技术系,北京100084; 东北电力集团公司,沈阳110006 收稿日期:1998-06-23 第一作者:女,1950年生,副教授 *基金项目:国家攀登计划B(85-35) 文 摘 提出了一种用于电力系统负荷建模和参数辨识的遗传进化算法,该方法与传统的最小二乘法相比具有全局搜索优化特点,适用于非线性、不连续或微分不连续的各种负荷模型。该方法已成功用于工业负荷实测数据辨识及动态和静态负荷建模。在静态负荷建模上,辨识结果略优于传统的最小二乘法,且通用性更好,只需做极小的修改就可以用于各种形式的静态负荷模型。在动态负荷建模上算法不仅给出了更优秀的结果,而且表现出很好的稳健性。结果表明此方法在负荷建模中的优势。 关键词 遗传进化算法;负荷建模;参数辨识分类号 T M 761 电力负荷模型是电力系统分析、规划、运行和计算的基础,尤其在计算中对电力系统动态行为的模拟结果影响很大。不同的计算需要采用不同的负荷模型,常规采用以不同比例的恒定阻抗、恒定电流、恒定功率或考虑不同动静比例负荷模型的方式使计算结果相差很大,甚至会导致完全错误的结论[1,2]。研究表明建立符合实际的负荷模型是十分必要的。负荷特性具有时变、非线形、不确定等多种特点,且实际负荷的用电设备构成差别很大,尤其是当电压或电流变化时,负荷产生突变,这也增加了建模的难度和复杂性。参数辨识是负荷建模的核心,目前常用的有最小二乘法、辅助变量法、分段线性多项式等方法,其中传统的方法不能有效地克服负荷建模中的非线性和不连续性等问题,会产生多值性等误差。近年来ANN 方法在建模方面已取得成功,但该方法更侧重于模拟模型的动态过程,且形成的结果是非参数模型。 遗传进化算法是模拟自然界进化中优胜劣汰的 优化过程,原则上能以较大的概率找到全局的最优解,具有并行、通用、鲁棒性强,全局收敛性好等优 点。研究人员已在发电规划[3],发电调度[4],无功优化[5]中用算例证明了EP 方法比传统的梯度寻优技术更优越。 本文采用遗传进化算法对静态、动态负荷进行了实测建模。 1 电力负荷的数学模型 本文主要描述以负荷特性来分类的静态和动态模型的建模方法。1.1 静态负荷模型 静态负荷模型表示某一时刻负荷所吸收的有功功率和无功功率与同一时刻负荷母线电压和频率之间的函数关系。静态负荷模型一般以幂函数和多项式模型表示。 本文以幂函数模型为例进行计算,幂函数表示的静态负荷特性如下: P =P 0U a 1f a 2, Q =Q 0 U b 1 f b 2 . (1) 定义误差函数 E w = N i =1 [W m (i )-W c (i )] 2 N (2)式中:N 为测量点数,W m (i )分别表示第i 次有功或无功功率测量值,W c (i )表示利用第i 次采样U i ,f i 的值由式(1)得到的有功或无功计算值,X p 、X q 是待辨识参数的向量: X p =[P 0,a 1,a 2], X q =[Q 0,b 1,b 2]. (3) 辨识问题表述为极小值寻优问题,即搜索一组参数使误差E w 达到最小值。1.2 动态负荷的模型 动态负荷模型表示某一时刻负荷所吸收的有功
三相异步电动机规格
一、概述 Y系列电动机是一般用途的全封闭自扇冷式鼠笼型三相异步电动机。安装尺寸和功率等级符合IEC标准,外壳防护等级为IP44,冷却方法为IC411,连续工作制(S1)。适用于驱动无特殊要求的机械设备,如机床、泵、风机、压缩机、搅拌机、运输机械、农业机械、食品机械等。 Y系列电动机效率高、节能、堵转转矩高、噪音低、振动小、运行安全可靠。Y80~315电动机符合Y系列(IP44)三相异步电动机技术条件 JB/T9616-1999。Y355电动机符合Y系列(IP44)三相异步电动机技术条件JB5274-91。Y80~315电动机采用B级绝缘。Y355电动机采用F级绝缘。额定电压为380V,额定频率为50Hz。功率3kW及以下为Y接法;其它功率均为△接法。电动机运行地点的海拔不超过1000m;环境空气温度随季节变化,但不超过40℃;最低环境空气温度为-15℃;最湿月月平均最高相对湿度为90%;同时该月月平均最低温度不高于25℃。 电动机有一个轴伸,按用户需要,可制成双轴伸,第二轴伸亦能传递额定功率,但只能用联轴器传动。 按用户需要,还可供应其他功率、电压、频率、湿热带型(TH)、防护等级等电动机。 二、订货须知 1.订货时请注明电动机型号、功率、调速、电压、频率、噪声及安装型式等。若未注明噪声等级,均按2级供货。 2.对于5.5kW及以上的2极电动机和37kW及以上的4极电动机不能用皮带传动。 3.如有特殊要求,请在合同中注明,并事先与制造厂联系。 型号额定 功率 额定 电流 转速效率 功率 因数 堵转转矩堵转电流最大转矩噪声振动 速度 重量 额定转矩额定电流额定转矩1级2级 kW A r/min%COSФ倍倍倍dB(A)mm/s kg 同步转速3000r/min 2 级 Y80M1-20.75 1.8283075.00.84 2.2 6.5 2.36671 1.817 Y80M2-2 1.1 2.5283077.00.86 2.27.0 2.36671 1.818 Y90S-2 1.5 3.4284078.00.85 2.27.0 2.37075 1.822 Y90L-2 2.2 4.8284080.50.86 2.27.0 2.37075 1.825 Y100L-23 6.4288082.00.87 2.27.0 2.37479 1.834 Y112M-248.2289085.50.87 2.27.0 2.37479 1.845 Y132S1-2 5.511.1290085.50.88 2.07.0 2.37883 1.867 Y132S2-27.515290086.20.88 2.07.0 2.37883 1.872 Y160M1-21121.8293087.20.88 2.07.0 2.38287 2.8115 Y160M2-21529.4293088.20.88 2.07.0 2.38287 2.8125 Y160L-218.535.5293089.00.89 2.07.0 2.28287 2.8145 Y180M-22242.2294089.00.89 2.07.0 2.28792 2.8173 Y200L1-23056.9295090.00.89 2.07.0 2.29095 2.8232 Y200L2-23769.8295090.50.89 2.07.0 2.29095 2.8250 Y225M-24584297091.50.89 2.07.0 2.29097 2.8312 Y250M-255103297091.50.89 2.07.0 2.29297 4.5387 Y280S-275139297092.00.89 2.07.0 2.29499 4.5515 Y280M-290166297092.50.89 2.07.0 2.29499 4.5566 Y315S-2110203298092.50.89 1.8 6.8 2.299104 4.5922 Y315M-2132242298093.00.89 1.8 6.8 2.299104 4.51010 Y315L1-2160292298093.50.89 1.8 6.8 2.299104 4.51085 Y315L2-2200365298093.50.89 1.8 6.8 2.299104 4.51220 Y355M1-2220399298094.20.89 1.2 6.9 2.2109 4.51710 Y355M2-2250447298594.50.90 1.27.0 2.2111 4.51750
Bouc-Wen 滞回模型的参数辨识
上海交通大学 硕士学位论文 Bouc-Wen滞回模型的参数辨识及其在电梯振动建模中的应用 姓名:周传勇 申请学位级别:硕士 专业:机械设计及理论 指导教师:李鸿光 20080201
Bouc-Wen滞回模型的参数辨识 及其在电梯振动建模中的应用 摘 要 电梯导靴是连接轿箱系统与导轨的装置,它能起到导向和隔振减振的作用。同时,在电梯的运行过程中它又将导轨由于制造或安装所造成的表面不平顺度传递给轿箱系统,从而引起轿箱系统的水平振动。国内外学者在电梯水平振动的建模和分析中,往往把导靴视为线性弹簧-阻尼元件来建模而忽略了非线性因素。事实上导靴与导轨之间存在非线性的迟滞摩擦力,本文通过实验的方法,采用Bouc-Wen 滞回模型来建立导靴-导轨非线性摩擦力模型。 Bouc-Wen滞回模型因其微分形式的非线性表达式而使得其参数辨识存在较大的困难,本文利用模型中部分参数的不敏感性,通过数学变换将非线性参数辨识问题转化为线性参数辨识问题,从而使得问题大大简化,参数辨识的效果也能满足要求。 基于以上导靴-导轨间摩擦力模型,本文进而建立了轿箱-导轨耦合水平振动动力学模型,该模型将轿箱系统等效为2自由度的平面运动刚体,将导靴等效为质量-弹簧-阻尼单元,同时考虑了导靴-导轨间的非线性摩擦力,以及导靴靴衬与导轨间接触的不连续性等。 在建立了轿箱-导轨耦合水平振动动力学模型后,利用Matlab/Simulink,建立了相应的仿真模型,开展了几种典型导轨不
平顺度激励(弯曲、失调和台阶)下的仿真分析。研究结果表明,这些分析对于电梯结构优化设计和动力学建模与分析有理论指导意义。 关键词:迟滞,参数辨识,非线性,动力学建模,系统仿真
基于数据挖掘的遗传算法
基于数据挖掘的遗传算法 xxx 摘要:本文定义了遗传算法概念和理论的来源,介绍遗传算法的研究方向和应用领域,解释了遗传算法的相关概念、编码规则、三个主要算子和适应度函数,描述遗传算法计算过程和参数的选择的准则,并且在给出的遗传算法的基础上结合实际应用加以说明。 关键词:数据挖掘遗传算法 Genetic Algorithm Based on Data Mining xxx Abstract:This paper defines the concepts and theories of genetic algorithm source, Introducing genetic algorithm research directions and application areas, explaining the concepts of genetic algorithms, coding rules, the three main operator and fitness function,describing genetic algorithm parameter selection process and criteria,in addition in the given combination of genetic algorithm based on the practical application. Key words: Data Mining genetic algorithm 前言 遗传算法(genetic algorithm,GAs)试图计算模仿自然选择的过程,并将它们运用于解决商业和研究问题。遗传算法于20世界六七十年代由John Holland[1]发展而成。它提供了一个用于研究一些生物因素相互作用的框架,如配偶的选择、繁殖、物种突变和遗传信息的交叉。在自然界中,特定环境限制和压力迫使不同物种竞争以产生最适应于生存的后代。在遗传算法的世界里,会比较各种候选解的适合度,最适合的解被进一步改进以产生更加优化的解。 遗传算法借助了大量的基因术语。遗传算法的基本思想基于达尔文的进化论和孟德尔的遗传学说,是一类借鉴生物界自然选择和自然遗传机制的随机搜索算法。生物在自然界的生存繁殖,显示对其自然环境的优异自适应能力。受其启发,人们致力于对生物各种生存特性的机制研究和行为模拟。通过仿效生物的进化与遗传,根据“生存竞争”和“优胜劣汰”的原则,借助选择、交叉、变异等操作,使所要解决的问题从随机初始解一步步逼近最优解。现在已经广泛的应用于计算机科学、人工智能、信息技术及工程实践。[2]在工业、经济管理、交通运输、工业设计等不同领域,成功解决了许多问题。例如,可靠性优化、流水车间调度、作业车间调度、机器调度、设备布局设计、图像处理以及数据挖掘等。遗传算法作为一类自组织于自适应的人工智能技术,尤其适用于处理传统搜索方法难以解决的复杂的和非线性的问题。 1.遗传算法的应用领域和研 究方向 1.1遗传算法的特点 遗传算法作为一种新型、模拟生物进化过程的随机化搜索方法,在各类结 构对象的优化过程中显示出比传统优 化方法更为独特的优势和良好的性能。 它利用其生物进化和遗传的思想,所以 它有许多传统算法不具有的特点[3]: ※搜索过程不直接作用在变量上,而是 作用于由参数集进行了编码的个体 上。此编码操作使遗传算法可以直接 对结构对象进行操作。 ※搜索过程是从一组解迭代到另一组 解,采用同时处理群体中多个个体的 方法,降低了陷入局部最优解的可能 性,易于并行化。