微型陀螺测量系统(IMU,VG,AHRS)

微型陀螺测量系统(IMU,VG,AHRS)
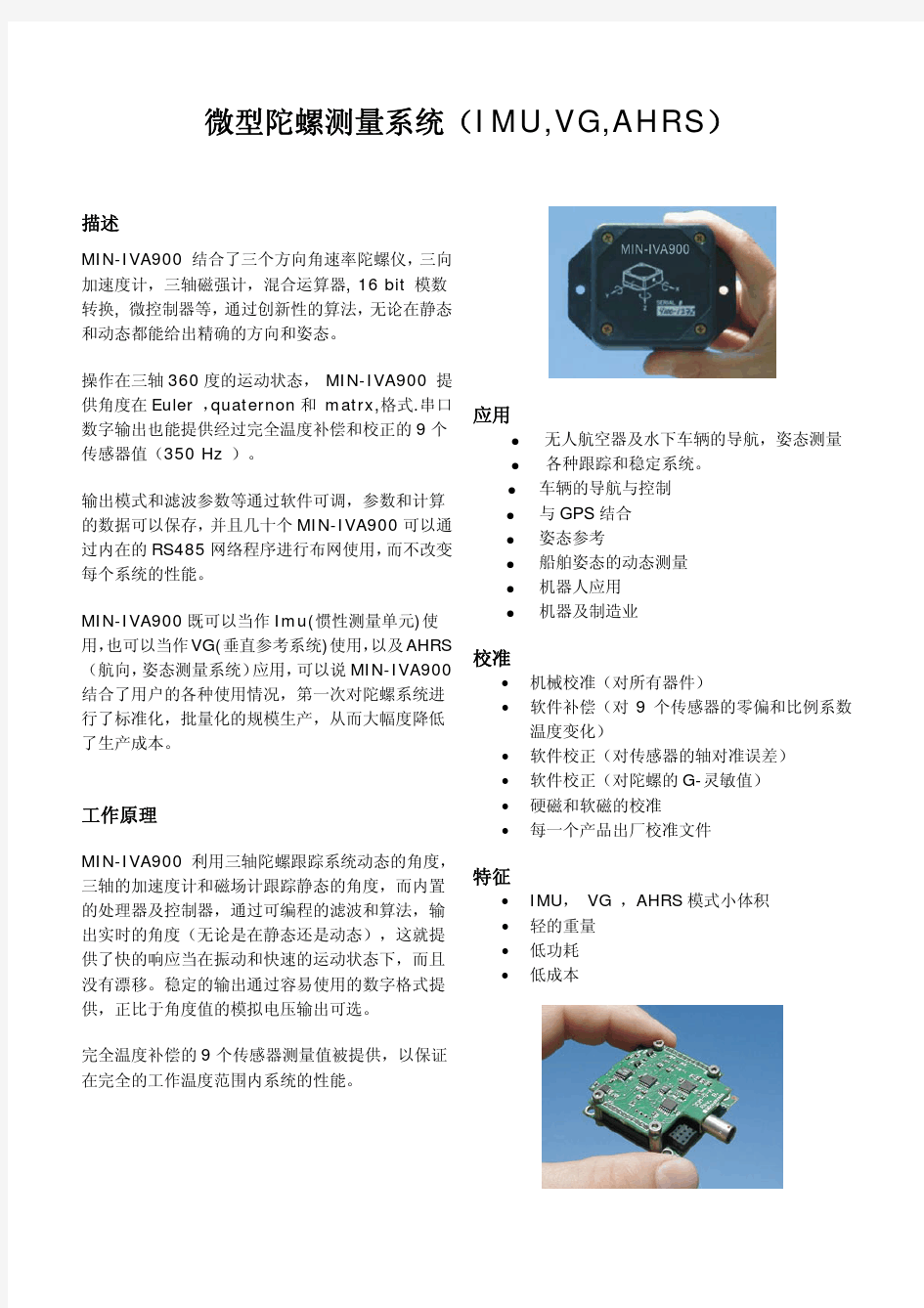
描述
MIN-IVA900 结合了三个方向角速率陀螺仪,三向
加速度计,三轴磁强计,混合运算器, 16 bit 模数
转换, 微控制器等,通过创新性的算法,无论在静态
和动态都能给出精确的方向和姿态。
操作在三轴360度的运动状态, MIN-IVA900 提
供角度在Euler ,quaternon和 matrx,格式.串口数字输出也能提供经过完全温度补偿和校正的9个传感器值(350 Hz )。
输出模式和滤波参数等通过软件可调,参数和计算的数据可以保存,并且几十个MIN-IVA900可以通过内在的RS485网络程序进行布网使用,而不改变每个系统的性能。
MIN-IVA900既可以当作Imu(惯性测量单元)使用,也可以当作VG(垂直参考系统)使用,以及AHRS (航向,姿态测量系统)应用,可以说MIN-IVA900结合了用户的各种使用情况,第一次对陀螺系统进行了标准化,批量化的规模生产,从而大幅度降低了生产成本。
工作原理
MIN-IVA900 利用三轴陀螺跟踪系统动态的角度,三轴的加速度计和磁场计跟踪静态的角度,而内置的处理器及控制器,通过可编程的滤波和算法,输出实时的角度(无论是在静态还是动态),这就提供了快的响应当在振动和快速的运动状态下,而且没有漂移。稳定的输出通过容易使用的数字格式提供,正比于角度值的模拟电压输出可选。
完全温度补偿的9个传感器测量值被提供,以保证在完全的工作温度范围内系统的性能。应用
●无人航空器及水下车辆的导航,姿态测量
●各种跟踪和稳定系统。
●车辆的导航与控制
●与GPS结合
●姿态参考
●船舶姿态的动态测量
●机器人应用
●机器及制造业
校准
?机械校准(对所有器件)
?软件补偿(对9个传感器的零偏和比例系数温度变化)
?软件校正(对传感器的轴对准误差)
?软件校正(对陀螺的G-灵敏值)
?硬磁和软磁的校准
?每一个产品出厂校准文件
特征
?IMU, VG ,AHRS模式小体积
?轻的重量
?低功耗
?低成本
性能参数
方向量程 360
度, 任意轴
传感器量程陀螺: +/-300 deg/s;加速度: +/- 5 G's ; 磁场: +/-1.2 Gauss FS A/D 分辨率16 bits
加速度线性度0.2%
加速度零偏稳定性* 0.010 G's
陀螺线性度0.2%
陀螺零偏稳定性* 0.7 degrees/sec
磁强计线性度0.4%
磁强计零偏稳定性 * 0.010 Gauss
方向分辨率< 0.1 deg
重复性0.20 deg
精度 +/-0.5
deg(静态), +/-2 deg(动态)
输出格式 Euler
,Quaternon, Matrx
串口数字输出RS-232
和 RS-485 (通过软件可选)
模拟输出(可选)0-5 V (pitch +/-90, roll +/-180, yaw 360 deg.)
带宽三个角度值(yaw ,pitch , roll )100 Hz; 九个传感器值350 Hz
串口数据速率 19.2/38.4/115.2
Kb,
软件可编
供应电压 5.2
V(最小)﹏12 V(最大).
供应电流65 mA
操作温度-40 to +70 ℃(带外壳封装); -40 to +85 ℃(不带外壳)
尺寸(带外壳封装)尺寸(不带外壳)25x 65 x 90 mm; 1.0x2.5 x 3.5 15 x 40x 42mm; 0.6x1.6x1.65"
重量 74
g.
(带外壳封装), 25 g. (不带外壳)
冲击1000 G's (非工作状态); 500 G's (工作状态)
*以上精度和稳定度的获得是在完全的操作温度范围-40 to +70 degrees C
陕西航天长城测控有限公司https://www.360docs.net/doc/945263495.html, Tel:029-******** 82501710 Fax:029-********
稳定平台系统设计要点
技术论文学校:南京理工大学队伍:7046 指导老师:李军 成员1:雷杨成员2:陈舒思成员3:邝平作品名称:高精度稳定平台控制系统
摘要 稳定平台能够隔离载体角运动,在载体机动状态下建立稳定基准面,使安装在平台上的光电设备不会因载体运动产生的抖动和滚动而丢失目标,保证光电设备准确瞄准和跟踪目标,因此广泛应用于民用和军事领域。 设计的高精度稳定平台控制系统是以动力调谐陀螺仪为速度敏感元件,旋转变压器为角度测量元件,DSP控制器TMS320F28335为主控芯片,直流力矩电机为被控对象的闭环控制系统。根据所需关键器件的选型设计了系统的硬件电路,包括速度和角度信号采样电路、电机驱动电路、通信电路等。采用电流环和位置环的双闭环控制方式实现系统载体静止时的伺服控制;采用电流环、速度环和位置环的三闭环控制方式实现系统在载体运动时的稳定控制。以上两种控制模式下的角度控制精度都能够达到0.05mrad,载体运动时系统稳定控制模式下隔离扰动效果很好。 实测结果表明,该系统硬件结构简单,稳定性好,实时性强,具有良好的稳态和动态性能,能够满足稳定平台系统的性能要求。 关键词:稳定平台DSP 陀螺仪伺服控制
目录 1. 作品创意 (1) 2. 方案设计与论证 (1) 2.1 主控芯片的选择与论证 (2) 2.2陀螺的选择与论证 (3) 2.3 力矩电机的选择与论证 (3) 2.4 位置检测元件的选择与论证 (3) 3. 系统硬件与原理图设计 (4) 3.1 最小系统外围电路 (4) 3.2 旋转变压器-数字转换器电路 (5) 3.3 滤波采样电路 (6) 3.4 电机驱动电路 (7) 3.5 通信电路 (8) 3.6 闭锁电路 (9) 3.7 电源隔离电路 (9) 4. 软件设计与流程 (10) 4.1 主程序框架 (10) 4.2中断程序设计 (10) 5. 系统测试与分析 (13) 5.1 系统调试环境 (13) 5.2 系统静止状态下伺服控制调试结果 (13) 5.3 系统运动状态下稳定控制调试结果 (15) 6.作品难点与创新 (18) 6.1难点 (18) 6.2创新点 (18)
陀螺定向方法和精度评定
陀螺逆转点法定向及精度评定 摘要 隧道或井巷工程测量导线布设的形式因受巷道形状的制约,若单纯采用改变导线布设形式或提高测角次数与精度等方法,往往难以满足工程施工对于测量的精度要求。陀螺经纬仪是测量井下导线边方位角、提高测量精度的重要仪器。尤其是在贯通测量中陀螺经纬仪的应用非常广泛。贯通测量是一项十分重要的测量工作,必须严格按照设计要求进行。巷道贯通后,其接合处的偏差不能超过一定限度,否则就会给采矿工程带来不利影响,甚至造成很大的损失。本文对陀螺经纬仪工作原理介绍,以及陀螺经纬仪在贯通测量中的精度评定。陀螺经纬仪在不同领域的贯通测量工作中运用实例的分析,总结出在贯通测量导线加测陀螺定向边的最佳位置。 关键词:陀螺定向,贯通测量,陀螺经纬仪,精度评定 ABSTRACT Tunnel or shaft engineering measurement wires for the form of roadway, if simple shape by changing arrangement forms or improve wires and precision Angle measurement methods, and often difficult to satisfy the measurement accuracy for engineering construction. Gyro theodolite is measured in wire edge Angle, improve the measuring precision instruments. Especially in the measurement of the photoelectric theodolite gyro breakthrough is used extensively. Through measurement is a very important measurement work, must strictly according to the design requirements. The roadway expedite, its joint deviation cannot exceed a certain limit, otherwise they will be detrimental to the mining project, and even cause great losses. This paper introduces working principle of gyro theodolite, as well as the breakthrough in the measurement of the gyro theodolite accuracy assess. Gyro theodolite in different fields
方位角测量
视力保护色: - 字体大小:大中小 第六章→第三节→导线测量内业计算 导线计算的目的是要计算出导线点的坐标,计算导线测量的精度是否满足要求。首先要查实起算点的坐标、起始边的方位角,校核外业观测资料,确保外业资料的计算正确、合格无误。 一、坐标正算与坐标反算 1、坐标正算 已知点的坐标、边的方位角、两点间的水平距离,计算待定点的坐标,称为坐标正算。如图6-6 所示,点的坐标可由下式计算: 式中、为两导线点坐标之差,称为坐标增量,即: 【例题6-1】已知点A坐标,=1000、=1000、方位角=35°17'36.5", 两点水平距离=200.416,计算点的坐标? 35o17'36.5"=1163.580 35o17' 36.5"=1115.793 2、坐标反算 已知两点的坐标,计算两点的水平距离与坐标方位角,称为坐标反算。如图6-6可知,由下式计算水平距离与坐标方位角。 (6-3) (6-4)式中反正切函数的值域是-90°~+90°,而坐标方位角为0°~360°,因此坐标方位角的值,可根据、的正负号所在象限,将反正切角值换算为坐标方位角。 【例题6-2】=3712232.528、=523620.436、=3712227.860、
=523611.598,计算坐标方位角计算坐标方位角、水平距离。 =62°09'29.4"+180°=242°09'29.4" 注意:一直线有两个方向,存在两个方位角,式中:、的计算是过A 点坐标纵轴至直线的坐标方位角,若所求坐标方位角为,则应是A点坐标减点坐 标。 坐标正算与反算,可以利用普通科学电子计算器的极坐标和直角坐标相互转换功能计算,普通科学电子计算器的类型比较多,操作方法不相同,下面介绍一种方法。 【例题6-3】坐标反算,已知=2365.16、=1181.77、=1771.03、 =1719.24,试计算坐标方位角、水平距离。 键入1771.03-2365.16按等号键[=]等于纵坐标增量,按储存键[], 键入1719.24-1181.77按等号键[=]等于横坐标增量,按[]键输入,按[]显示横坐标增量,按[]键输入,按第二功能键[2ndF],再按[]键,屏显为距离,再按[]键,屏显为方位角。 【例题6-4】坐标正算,已知坐标方位角=294°42'51",=200.40,试计算纵坐标增量横坐标增量。 键入294.4251,转换为以度为单位按[DEG],按[]键输入,键入200.40,按[]键输入,按第二功能键[2ndF],按[]屏显,按[]屏显。 第六章→第三节→导线测量内业计算 二、附合导线的坐标计算 (一)角度闭合差的计算与调整 1、联测边坐标方位角计算(坐标反算) 用式(6-4)计算起始边与终边的坐标方位角。 2、导线各边坐标方位角的计算 如图6-7所示,根据已知坐标方位角,观测右角,则各边方位角为:
基于labview的语音信号采集系统
电气与自动化工程学院《LabVIEW编程实训》评分表课程名称:LabVIEW编程实训 题目:基于labview的语音信号采集系统设计 班级:1601131自动化学号:160113113姓名:刘德旺 指导老师: 年月日
常熟理工学院电气与自动化工程学院《LabVIEW编程实训》技术报告题目:基于LabVIEW的语音信号采集系统设计 姓名:刘德旺 学号:160113113 班级:自动化131 指导教师:陈飞 起止日期:2016年6月20日-7月8日
LabVIEW编程实训答辩记录 自动化专业 1601131班级答辩人刘德旺 题目基于LabVIEW的语音信号采集系统设计 说明:主要记录答辩时所提的问题及答辩人对所提问题的回答
目录 1.任务书 (1) 2.基于LABVIEW的数据采集系统概述 (3) 2.1虚拟仪器概念与传统仪器概念主要区别 (3) 2.1.1LabVIEW虚拟仪器简介 (3) 2.1.2LabVIEW虚拟仪器特点 (3) 2.2 LabVIEW图形化程序的组成与特点 (4) 2.2.1前面版 (4) 2.2.2程序框图 (4) 2.2.3图标和连接器 (5) 3.语音信号采集总体设计方案与硬件配置 (6) 3.1语音信号采集系统的功能分析 (6) 3.2语音信号采集系统的总体构成 (6) 3.3语音信号采集系统的硬件配置 (6) 4.语音信号采集系统的软件设计与功能实现 (11) 4.1语音信号采集系统的软件前面板设计 (11) 4.1.1语音信号采样信息界面 (11) 4.1.2语音采集控制按钮界面 (11) 4.1.3时域波形和频域波形显示界面 (11) 4.2语音信号采集系统的软件程序框图设计 (12) 5.语音信号采集系统的运行与分析 (18) 6.收获与体会 (21) 参考文献 (23)
信号采集与回放系统
信号采集与回放系统 技术报告 电信082班084775240 周霞 (合作者:电信082班084775228 吴迪) 指导教师:倪海燕 2010-5-27
摘要:本设计通过A/D转换和D/A转换实现输入信号与输出信号的变化。通过实验箱上的模式3的ADC输入正弦波信号,设计按键选择,有3种模式分别是直接回放,单次回放,循环回放和定点回放。 关键字:信号回放模式选择 一、实验要求 1. 实现输入,存储,回放信号 2. 回放模式选择(直接回放,单次波形回放,循环回放,分段存储定点回放等) 二、总原理图 三、系统总体方案设计 根据实验要求,TLC5510A 是采样率最高为20MHz的8位并行高速ADC ,FPGA的PIO48输出信号控制ADC1的输出使能信号OE(低电平有效);PIO15为转换时钟信号CLK;AD转换结果送至PIO16~PIO23,并且同时显示在数码管1和数码管2上。ADC的模拟信号输入端在实验箱的左侧,允许输入0~5V的信号。 转换关系:DATA=255×Ain/5
数据从采集到转换结束需要两个半时钟周期 四、软件电路的设计 4.1控制器的设计 用VHDL语言编写控制器的程序,要有读写使能和模式选择。用choose[2]的四个状态分别表示直接回放,单次回放,循环回放和定点回放。 程序如下: library ieee; use ieee.std_logic_1164.all; use ieee.std_logic_unsigned.all; entity control is port ( clk:in std_logic; --时钟 writ:in std_logic; --读写使能 en:in std_logic; --使能 choose:in std_logic_vector(1 downto 0); --模式选择 ch:in std_logic_vector(1 downto 0); --阶段选择 enout:out std_logic; --读写使能输出 adr:out std_logic_vector(9 downto 0) ); --地址 end entity control; architecture behave of control is signal count1:std_logic_vector(9 downto 0); signal count11:std_logic_vector(9 downto 0); signal count2:std_logic_vector(9 downto 0); signal count22:std_logic_vector(9 downto 0); begin process(writ,en,ch,choose) begin if(en='1')then count1<="0000000000";count11<="0000000000"; count2<="0000000000";count22<="0000000000"; elsif (clk'event and clk='1')then if(choose="01")then ---- 单次回放
陀螺定向测量
陀螺定向测量 陀螺定向测量(gyrostatic orientation survey)是用陀螺经纬仪测定某控制网边的陀螺方位角,并经换算获得此边真方位角的测量工作。常用于定向连接测量。陀螺方位角,是从陀螺仪子午线(测站上通过假想的陀螺轴稳定位置的子午面,即陀螺仪子午面与地平面的交线)北方向顺时针量至某定向边的水平角。 常用方法 确定测站真子午线北方向的常用方向有:中天法,是通过对陀螺仪轴运转的观测,先确定近似北方向,在连续读记摆动的指标线(陀螺轴)反复经过分划线板零线时的时间,和到达东、西逆转点时的水平度盘读数,经计算获得近似北方向的改正数,进而确定测站真北方向;逆转点法,是用陀螺经纬仪跟踪观测摆动的指标线(陀螺轴)反复到达东、西逆转点时的水平度盘读数,经计算确定测站真北方向。 矿井应用 服了几何定向占用井筒而造成停产、耗费大量人力、物力和时间等缺点,同时也克服了随井筒深度增加而降低定向精度的缺点。由于矿井生产中对陀螺定向测量技术的应用还很少,陀螺定向技术在矿井生产中还缺乏系统性的操作要求及数据处理模式。2011年4月,麦格集团天渱公司螺仪部带领天津707所厂家技术人员到煤矿进行陀螺仪的测量演示,通过TJ9000陀螺全站仪与日本品牌陀螺全站仪比较,获取了实证分析数据。从技术及经济角度考虑,对陀螺定向测量技术的研究,在矿井生产中具有非常重要的意义。 1、陀螺定向作业依据 本次陀螺定向作业依据为1989年1月能源部制定的《煤矿测量规程》并参照1990年原中国统配煤矿总公司组织修订、煤炭工业出版社出版的《煤矿测量手册》。 2、陀螺定向作业仪器 陀螺定向采用中船重工TJ9000陀螺全站仪为例,该仪器是下架式的陀螺仪器,有陀螺仪、全站仪、控制器和三脚架等组成。陀螺仪方位角测定标准偏差为±20",全站仪测角精度为2"。 3、陀螺定向方法 陀螺定向采用当今先进的积分法进行观测,定向程序为:
陀螺定向测量报告
中国人民解放军第一〇〇一工厂 陀螺仪定向报告 XXX矿业1# 与3# 斜坡道实测 2015年10月26日
潼金矿业1#、3#斜坡道陀螺定向测量成果报告 1 定向设备 本次陀螺定向采用中国人民解放军第一〇〇一工厂自主研发、生产的HGG05型陀螺全站仪(1σ≤5″),编号15001,上置中翰测绘公司生产的TS-802N型全站仪。 2 数据来源 点位信息由XXX矿业地勘部提供。 表1 控制点信息 其中地面控制点为:G3007、G3006;G3024、G3022。 α=246°52′09″,根据计算得知控制边方位角分别为:3006 G3007→ G α=334° 40′ 28″。 G3024→ 3022 G 3 定向过程
1) 在控制边进行2测回定向测量,标定仪器常数; 2) 在待定边进行3测回定向测量; 3) 在原控制边进行2测回定向测量, 以两次控制边测量结果检验仪器的稳定性和精度,确保陀螺定向成果准确可靠。 4 陀螺定向的限差要求 1) 同一条边各测回测量结果最大互差不得超过10″; 2) 两次地面控制边测量结果均值之差不得大于15″。 5 数据处理结果 5.1 方法1数据处理方法及结果 5.1.1 仪器常数的计算 1T 1T1--A A A C γα+==控制控制 式中:?-仪器常数; 控制α-控制边坐标方位角,即3006G G3007→α、3022G G3024→α; 1γ-控制边仪器架设点子午线收敛角; 1T A -控制边测得(含复测)的陀螺方位角均值; 子午线收敛角1γ用下式计算。 ?λλγsin )-(1中控制= 式中:控制λ-控制边仪器架设点经度,精确到秒; 中λ-仪器架设点所处3° 带中央子午线; ?-仪器架设点纬度,精确到分。 标定仪器常数实测陀螺方位角结果见表2。
生物信号采集系统的使用讲义回顾.doc
计算机生物信号采集处理系统的认识及使用 计算机是一种现代化、高科技的自动信息分析、处理设备。随着电子计算机技术在生物、医学领域的广泛应用,使原先不易进行的某些生物信息的检测,变得简易可行。利用计算机采集、处理生物信息,让计算机进入机能学实验室已成为必然趋势。 计算机生物信号采集处理系统就是以计算机为核心,结合可扩展的软件技术,集成生物放大器与电刺激器,并且具备图形显示、数据存储、数据处理与分析等功能的电生理学实验设备。对生物信号采集系统的了解和熟练使用,是今后对完成生理学实验的数据和图形采集、储存和处理所必须具备的基本技能之一。 一、目的要求 1、熟悉计算机生物信号采集处理系统的基本原理及组成; 2、熟悉并掌握计算机生物信号采集处理系统的基本操作与使用方法。 二、内容 1、学习计算机生物信号采集处理系统的组成及原理; 2、计算机生物信号采集处理系统的基本操作与使用。 三、计算机生物信号采集处理系统的工作原理 现代生物机能实验系统的基本原理是:首先将原始的生物机能信号,包括生物电信号和通过传感器引入的生物非电信号进行放大(有些生物电信号非常微弱,比如减压神经放电,其信号为微伏级信号,如果不进行信号的前置放大,根本无法观察)、滤波(由于在生物信号中夹杂有众多声、光、电等干扰信号,这些干扰信号的幅度往往比生物电信号本身的强度还要大,如果不将这些干扰信号滤除掉,那么可能会因为过大的干扰信号致使有用的生物机能信号本身无法观察)等处理,然后对处理的信号通过模数转换进行数字化并将数字化后的生物机能信号传输到计算机内部,计算机则通过专用的生物机能实验系统软件接收从生物信号放大、采集硬件传入的数字信号,然后对这些收到的信号进行实时处理,一方面进行生物机能波形的显示,另一方面进行生物机能信号的实时存贮,另外,它还可根据操作者的命令对数据进行指定的处理和分析,比如平滑滤波,微积分、频谱分析等。对于存贮在计算机内部的实验数据,生物机能实验系统软件可以随时将其调出进行观察和分析,还可以将重要的实验波形和分析数据进行打印。
船舶稳定平台解决方案
船舶稳定平台解决方案 陀螺稳定平台(gyroscope-stabilized platform)利用陀螺仪特性保持平台台体方位稳定的装置。简称陀螺平台、惯性平台。用来测量运动载体姿态,并为测量载体线加速度建立参考坐标系,或用于稳定载体上的某些设备。它是导弹、航天器、飞机和舰船等的惯性制导系统和惯性导航系统的主要装置。 稳定平台作为一种安放在运动物体上的设备,具有隔离运动物体扰动的功能。稳定平台在航空航天、工业控制、军用及商用船舶中都有比较广泛的用途,例如航拍、舰载导弹发射台、船载卫星接收天线等。船舶上工作面或者平台姿态检测,船载天线稳定平台系统,会应用倾角传感器定时(较长时间)读取数值,通过计算后,对稳定平台进行校正。平台的实际运动由单片机控制外部机械装置以达到对稳定水平平台进行修正,以保证其始终处于水平状态。某些倾角传感器作为船体液压调平系统中的反馈元件,提供高精度的倾角信号。既可用于水下钻进也可用于水下开采等。 在国外,陀螺稳定跟踪装置被广泛应用于地基、车载、舰载、机载、弹载以及各种航天设备中。20世纪40年代末,为了减少车体振动对行进间射击的影响,在坦克上开始安装火炮稳定器,从50年代起,双稳定器在坦克中得到了广泛的应用。在英、美等国的先进武器系统中,基于微惯性传感器的稳定跟踪平台得到了广泛的应用,如美国的M1坦克、英国“挑战者”坦克、俄罗斯T-82坦克、英国“标枪”导弹海上发射平台和“海枭”船用红外跟踪稳定平台等,都采用了不同类型的稳定跟踪平台。美国海军采用BEI电子公司生产的QRS-10型石英音叉陀螺,研制出WSC-6型卫星通讯系统的舰载天线稳定系统,工作12万小时尚未出现故障;Honeywell公司以红外传感器平台稳定为应用背景,研制的以GG1320环形激光陀螺为基础的惯性姿态控制装置,很好的满足了稳瞄跟踪系统的要求。美军配装的Honeywell公司采用激光陀螺技术研制的自行榴弹炮组件式方位位置惯性系统(MAPS6000) ,在工作时可连续提供高精度的方位基准、高程、纵摇、横摇、角速率、经度和纬度输出,性能大大高于美军MAPS系统规范的要求。在导弹制导方面,俄罗斯的X-29T、美国的“幼畜”AGM-65、以色列的“突眼”等成像制导导引头中,都采用了陀螺稳定跟踪平台。在机载设备中,陀螺稳定平台在机载光-电火控系统和机载光电侦察平台中也得到极其广泛的应用,美国、以色列、加拿大、南非、法国、英国、俄罗斯等国家都已研制出多种型号产品装备部队。如以色列的ESP-600C型无人机载光电侦察平台采用两轴平台,其方位转动范围360o×N、俯仰+10o----10o、最大角速度50o/s、最大角加速度60o/s2,其稳定精度达到15μrad,所达精度代表了国际先进水平。 国内对陀螺稳定平台的研究起步较晚,20世纪80年代开始研制瞄准具稳定平台,而90 年代初才开始陀螺稳定平台的研制。虽有不少单位,如北京电子3所、长春光机所、中科院成都光电所、西安应用光学研究所、华中光电技术研究所和清华大学等都在开展该应用领域的研究工作,但在稳定跟踪平台技术的研究上与国外相比仍有较大差距,由于惯性元件的技术不过关,成本较高,致使该项技术的研究始终没有取得突破性的进展。 一、船用红外/可见光陀螺稳定平台 近年来,随着精密机械、电子技术、数字信号处理技术和模式识别技术的飞速发展,陀螺伺服稳定跟踪系统的性能也有了很大的提高。陀螺伺服稳定跟踪系统,其主要任务是完成
IMU信号采集系统
IMU信号采集系统
目录 1.概述 (1) 2.IMU信号采集系统的主要功能 (1) 2.1.高精度时间 (1) 2.2.陀螺仪、加速度计的数据采集 (1) 3.IMU信号采集系统设计方案及原理 (1) 3.1.整体方案 (1) 3.2.授时原理 (2) 3.3.陀螺仪和加速度计的输出信号调理电路 (2) 3.4.陀螺仪和加速度计输出信号的采集 (3) 4.传感器及核心元器件 (4) 4.1.陀螺仪 (4) 4.2.加速度计 (4) 4.3.GPS (5) 4.4.核心元器件 (5) 5.IMU信号采集系统 (6) 5.1.机械设计 (6) 5.2.电路设计 (6) 5.3.IMU信号采集系统 (8)
1.概述 传统的航空摄影测量需要布设大量地面控制点,效率低下。POS系统集全球定位系统(GPS)、惯性导航系统(INS)于一体,综合具备了GPS和INS的优点,即使在GPS信号被遮挡的时候,其解算的结果也是稳定连续的。利用POS系统能得到精确的相机曝光时刻以及相片外方位元素,从而实现无地面控制点的航空摄影测量。 目前国内较少自主研发POS系统,大多直接购买国外相关的产品,成本高昂。IMU信号采集系统以ARM和FPGA为核心,通过GPS和高稳晶体实现高精度的时间,同时通过高精度AD转换模块采集3轴加速度计、3轴陀螺仪的实时数据,最终输出带时间戳的高精度传感器数据,为POS系统的实现打下了坚实基础。 2.IMU信号采集系统的主要功能 2.1.高精度时间 本系统结合GPS、高稳石英晶体,以FPGA为核心,结合有效的算法,产生高精度的时间(精度 )。 可达10uS 2.2.陀螺仪、加速度计的数据采集 通过FPGA及AD转换模块采集陀螺仪(三轴)、加速度计(三轴)等传感器的输出信号。并将陀螺仪、加速度计进行数字化、滤波,最终将带有时间戳和各传感器输出的数据按照设定的时间间隔快速地上传给上位机,进行进一步的处理。 3.IMU信号采集系统设计方案及原理 3.1.整体方案 硬件部分整体方案如图1所示,整个硬件系统由ARM,FPGA,三轴陀螺仪、三轴加速度计、GPS 等传感器单元,电源管理模块以及Flash和SDRAM以及单板计算机组成。FPGA主要接收陀螺仪、加速度计经AD转换后的数字信号,编码器和GPS的信号,完成高精度时钟和传感器的输出数据采集。ARM将FPGA采集到的数据信号存储,并接收FPGA输出的高精度时间脉冲,将传感器的信号打上高精度时间戳后通过USB或者UART快速上传给单板计算机,由单板计算机进行卡尔曼滤波等一系列处理后输出位置、时间及姿态信息。
陀螺全站仪定向精度评定和在工程中应用
陀螺全站仪定向精度评定和在工程中应用 摘要:目前陀螺全站仪标称精度大多在8到20秒之间,而常用全站仪标称精度 1秒或2秒,很多测量人员困惑于如何能用这么“低精度”陀螺全站仪来复测检核 的“高精度”全站仪测量的精密导线呢?查看了很多陀螺经纬仪(全站仪)精度相 关文献,一般只提到某款陀螺经纬仪(全站仪)精度指标达到多少,或者某工程 应用中实测精度达到多少,缺乏对精度指标的说明,造成了现在大量精度要求较 高项目(如:地铁导线复测)测量技术人员对陀螺精度困惑。本文从标称精度评 定及工程实际应用方法来说明这个问题。 关键词:陀螺全站仪精度、陀螺定向、导线方位校核 Abstract:At present,the gyro total station nominal accuracy mostly between 8 to 20 seconds,and commonly used total station instrument nominal accuracy of 1 or 2 seconds,many Surveyor confused on how to with such low accuracy gyro total station reflex test check the high precision of total station instrument measurement precision wire? To view the lot of gyro theodolite(total station)relative to the precision of the literature,generally only mentioned a gyro theodolite(total station)precision index reach the number,or a project application measurement accuracy reach,lack of precision description index,caused by now a large number of high precision project(such as:subway traverse azimuth verification)measurement of technical personnel on the precision of gyro is confused.In this paper,the nominal accuracy assessment and engineering application methods to description the problem. Keywords:gyro total station,gyro direction,traverse azimuth verification 1、引言 目前各地大量建设地铁轨道交通工程,地下定向测量十分重要,隧道《城市轨道交通工 程测量规范》中联系测量可采用陀螺经纬仪、铅垂仪(钢丝)组合定向测量;地下控制测量 部分要求贯通面一侧隧道长度大于1500米时,适当位置加测陀螺边提高控制导线精度。目 前陀螺全站仪标称精度大多在8到20秒之间,而常用全站仪标称精度1秒或2秒,地铁控 制测量导线采用2.5秒精密导线,以往陀螺定向测量应用较多的矿山测量中一般采用7秒导线,很多测量人员困惑于如何能用这么“低精度”陀螺全站仪来复测检核地铁施工中采用的“高 精度”全站仪测量的精密导线呢?对陀螺全站仪标称精度理解,测量方法和精度评定掌握,解 决这个问题对正确使用陀螺定向保证导线复测有重要的实践意义。 2、陀螺全站仪精度指标 查看了很多陀螺经纬仪(全站仪)精度相关文献,一般只提到某款陀螺经纬仪(全站仪)精度指标达到多少,或者某工程应用中实测精度达到多少,缺乏对精度指标的说明,造成了 现在大量精度要求较高项目(如:地铁导线复测)测量技术人员对陀螺精度困惑。这里先提 两个概念:精确度和精密度。准确度(Accuracy):被测量所得值与真值间的一致程度。精 密度(precision),被测对象重复测量所得示值。(JJF1001-2011通用计量术语及定义)。陀 螺全站仪的精度指标采用的是准确度(Accuracy)。下面通过NTS-342T(54783)陀螺全站仪 标称精度:一次定向中误差m=±10″,在广州市计量检测技术研究院校准过程来说明这两个概念。 2015年1月28日,在广州市计量检测技术研究院陀螺仪校准装置上校准南方NTS-342T (54783)陀螺全站仪,校准装置天文基准方位角为=161°35′27.9″±0.5″。 陀螺全站仪实测数据如下: 序号测量参数值陀螺方位角(° ′ ″)与天文基准方位角差值(″)
陀螺定向测量报告记录
陀螺定向测量报告记录
————————————————————————————————作者:————————————————————————————————日期:
中国人民解放军第一〇〇一工厂 陀螺仪定向报告 XXX矿业1# 与3# 斜坡道实测 2015年10月26日
潼金矿业1#、3#斜坡道陀螺定向测量成果报告 1 定向设备 本次陀螺定向采用中国人民解放军第一〇〇一工厂自主研发、生产的HGG05型陀螺全站仪(1σ≤5″),编号15001,上置中翰测绘公司生产的TS-802N型全站仪。 2 数据来源 点位信息由XXX矿业地勘部提供。 表1 控制点信息 点位X Y G3007 3816634.319 428917.073 G3006 3816594.778 428824.508 G3024 3811951.219 432293.488 G3022 3812175.001 432187.585 1053 3814565.216 430662.229 1055 3814721.892 430541.139 E106 3814496.765 431437.456 E107 3814459.429 431541.895 3083 3811452.311 431630.663 3082 3811581.143 431634.860 其中地面控制点为:G3007、G3006;G3024、G3022。 α=246°52′09″,根据计算得知控制边方位角分别为:3006 G G3007→ α=334° 40′ 28″。 G3024→ G 3022 3 定向过程
动态信号数据采集系统
动态信号数据采集系统设计 岳林 (南阳理工学院机电工程系) [摘要]:本文以LabVIEW为开发平台,配以NI公司的6009数据采集卡,构建了振动试验台动态信号数据采集系统,实现了对振动、转速、转子轴心轨迹的等多种参数的实时监测、信号分析与处理、显示和数据保存,同时该系统测试结果与实验台自带软件的测试结果保持了良好的一致性。 [关键字]:动态信号;数据采集;LabVIEW;虚拟仪器;测试技术 Design of Dynamic Signal Sampling System YUE Lin (The Mechanical and Electrical Engineering of Nanyang Institute of Technology) Abstract:Based on the development platform of LabVIEW, matched with NI USB- 6009 data acquisition card, this paper constructs the vibration test experimental data acquisition system, which realizes the rotor speed, vibration, the axis path various parameters of the real-time monitoring, signal analysis and processing, and data storage,the system test results and experimental software testing results of bringing good consistency. Key word: Dynamic signal data acquisition; LabVIEW; virtual instrument; Testing Technology
陀螺测斜仪定向操作规程
SinoGyro陀螺测斜仪定向操作规程 一、检查仪器密封圈是否都已上好并完好无缺,仪器连接丝扣处用丝扣油涂抹,连接好仪器 并打紧。 二、在井上将井下仪放置在井斜20—30度之间。 三、转动井下仪,使定向引鞋的定键槽垂直向上并保持稳定。 四、开机,待仪器运转稳定后开始测量;连续测量三次以上,取最后三次稳定重力高边数值 的平均值(重复性误差≤+10)作为“高边初始角”的值输入计算机。 五、重测,确认此时重力高边实测数值为零(误差≤+10);仪器断电。 六、为了确保仪器井下顺利入键,定向接头下井之前必须与仪器引鞋进行地面入键测试,一 切顺利后,定向接头方可下井。 七、仪器下井时,在定向键槽涂上铅油。下放时下放速度≤2000米/小时;上提时≤1800 米/小时。当井下仪下放距离定向接头50米时,控制下放速度在1200-1500米/小时之间;仪器入键后,待地滑轮落地时,方可停绞车。 八、绞车停稳2分钟后,开机测量,连续测量2次,检查仪器稳定性和重复性并记录测量数 据;一切正常后仪器断电,待陀螺停稳后上提30米以上,开始第二次坐键并测量;连续坐键三次,三次高边测量值误差≤+50时即可确认仪器入键。 九、仪器入键后不动,地面转动钻杆或油管至所需位置,然后上提下放钻杆或油管各三次, 每次活动范围3—5米,待活动完成后开机测量定向键的位置,如果达不到要求,继续转动和活动井下工具,至定向键位置达到工艺要求为止,至此陀螺定向结束。 十、陀螺测斜仪高边转换角默认值为3度,测量过程中如果想同时观察陀螺高边和重力高边 时,可在同一位置改变高边转换角的数值来实现。 十一、定向测量结束后,数据存盘,起出井下仪,进行现场资料交接。
测量方位角计算公式VB源代码
测量方位角计算公式VB源代码 角度化弧度 Public Function Radian(a As Double) As Double Dim Ra As Double Dim c As Double Dim FS As Double Dim Ib As Integer Dim Ic As Integer Ra = pi / 180# Ib = Int(a) c = (a - Ib) * 100# Ic = Int(c) FS = (c - Ic) * 100# Radian = (Ib + Ic / 60# + FS / 3600#) * Ra End Function '弧度化角度 Public Function Degree(a As Double) As Double Dim B As Double Dim Fs1 As Double Dim Im1 As Integer Dim Id1 As Integer B = a Call DMS(B, Id1, Im1, Fs1) Degree = Id1 + Im1 / 100# + Fs1 / 10000# End Function Public Sub DMS(a As Double, ID As Integer, IM As Integer, FS As Double) Dim B As Double Dim c As Double c = a c = 180# / pi * c ID = Int(c + 0.0000005) B = (c - ID) * 60 + 0.0005 IM = Int(B) FS = (B - IM) * 60 End Sub '计算两点间的方位角 Public Function azimuth(x1 As Double, y1 As Double, x2 As Double, y2 As Double) As Single Dim dx As Double Dim dy As Double Dim fwj As Double dx = x2 - x1 dy = y2 - y1 If dy <> 0 Then fwj = pi * (1 - Sgn(dy) / 2) - Atn(dx / dy) azimuth = Degree(fwj) Else If dx > 0 Then
心电信号采集及系统设计
微弱信号检测课题报告 心电信号采集 —噪声分析及抑制 指导老师:宋俊磊 院系:机电学院测控系 班级: 学号: 姓名:
【目录】 【摘要】 (4) 第一章 (5) 1.1人体生物信息的基本特点[1} (5) 1.2 体表心电图及心电信号的特征分析[4] (6) 1.3心电信号的噪声来源[7] (8) 1.4 心电电极和导联体系分析 (10) 1.4.1系统电极选择[8] (10) 第二章硬件电路设计 (10) 2.1 心电信号采集电路的设计要求 (10) 2.2 心电采集电路总体框架 (11) 2.3采集电路模块 (13) 2.4 AD620引入的误差 (14) 2.4.1 电子元件内部噪声 (14) 2.4.2 集成运放的噪声模型: (16) 2.4.3 AD620的噪声计算 (17) 2.4.4 前置放大电路改进措施 (18) 2.5 滤波电路设计 (22)
2.6电平抬升电路[14] (24) 2.7心电信号的50Hz带阻滤波器(50Hz陷波)设计[15] (25) 结论 (26) 附录:参考文献 (28)
【摘要】 心脏是人体循环系统的核心,心脏的活动是由生物电信号引发的机械收缩。在人体这个三维空间导体当中,这种生物电信号可以波及人体各个部分,在人体体表产生规律性的电位变化。在人体体表的一定位置安放电极,按时间顺序放大并记录这种电信号,可以得到连续有序的曲线,这就是心电图。 针对心电信号的特点进行心电信号的采集、数据转换模块的设计与开发。设计一种用于心电信号采集的电路,然后进行A/D转换,使得心电信号的频率达到采样要求。人体的心电信号是一种低频率的微弱信号,由于心电信号直接取自人体,所以在心电采集的过程中不可避免会混入各种干扰信号。为获得含有较小噪声的心电信号,需要对采集到的心电信号做降噪处理。运用一个心电信号检测放大电路,充分考虑了人体心电信号的特点,采用前置差动放大+带通滤波器+50Hz陷波器(带阻滤波器)组成的模式,对心电信号进行测量。 关键词:心电信号采集,降噪,A/D转换放大,噪声分析
稳定平台关键技术综述
稳定平台关键技术综述 0引言 从科索沃战争、伊拉克战争到最近的利比亚战争,局部战争成为主要的作战模式。与以往的区域攻击不同,现代局部战争的主要特点是快速反应、精确打击。为应对未来局部战争,做到敢打必胜,改进与研制武器装备,提高部队作战能力成为首要任务。 在我军车载陆战装备中,战术导弹、坦克、火炮等武器系统近些年来有了很大发展,射击范围和精度都有了很大提高。但与外军先进装备相比,行进间射击精度尚有较大差距,甚至大多装配的武器系统还无法实现行进间射击。行进间射击作为提高部队作战效率,增强武器装备自我防护能力的重要指标,已成为未来陆战装备的主要发展方向,同时这也使得对武器系统的改进与研制迫在眉睫。 瞄准线稳定技术是实现行进间射击、提高行进间射击精度的主要环节。它采用稳定平台对车体的航向、纵摇和横滚运动进行有效的隔离,使瞄准线在惯性坐标系下保持稳定。为提高陆战装备快速反应与精确打击能力,急需提高稳定瞄准的快速性、精确性、自适应性,因此本课题的研究具有重要意义。 1稳定平台国内外研究现状 在光电稳定平台中,陀螺稳定平台迄今得到了广泛的应用,它是采用一个环架系统作为光电传感器的光学平台,在平台上放置陀螺来测量平台的运动,陀螺敏感姿态角的变化经过放大以后驱动环架的力矩电机,通过力矩电机驱动平台使光电传感器保持稳定。在国外起初应用于手持式望远镜和瞄准具中,并在八十年代装备部队,现已广泛应用于地基、车载、舰载、机载、弹载、天基等各种观测、摄像系统中。1996年,美国的航空红外制造商前视红外系统公司以电子新闻采集市场为目标推出了一种双传感器系统,它包括一个用于低照度的高分辨率红外摄像机和用于白天的标准广播摄像机,这两台摄像机一起被安装在一个紧凑的三轴陀螺稳定的万向架中,能够提供50rad μ的图像稳定精度,意大利的Caselle-Torinese 公司生产的11072Caselle-Torinese 光轴稳定平台的旋转范围可以做到高低方位均为??360~0,最大旋转速度为?60/s ,稳定精度为0.4mrad 。英国的Ferranti Electro-optics 公司生产的FIN1155用于坦克的陆地导弹/稳定平台,其瞄准线的稳定精度达到了0.1mrad 。法国的SAGEM 公司研制的舰载对空红外全景监视系统可以在?+?-30~30的摇摆,?+?-10~10的纵摇时的稳定精度达到0.5mrad 。1994年法国生产的“唯吉-105”型周视光电火控红外系统,在方位为??360~0,俯仰角为??-65~25范围内稳定精度为0.1mrad 。以色列研制的ESP-1H 采用两轴陀螺稳定平台,在方位角为??360~0,俯仰角在?+?-110~10的范围内,最大旋转速度为?50/s 的稳定精度高达50rad μ,而ESO-600C 的稳定精度高达15rad μ。 国内上世纪80年代开始研制瞄准具稳定平台,90年代逐渐展开了陀螺稳定平台的研制。北京618所90年代初期研制了机载陀螺稳定平台,其稳定精度可达到0.1mrad ,中科院成都光电所承担的863子课题——快速反射镜成像跟踪系统,采用了二级稳定技术,并于1994年通过评审。华中光电技术研究所研制的舰载红外稳定平台的稳定精度为1mrad ,清华大学精密机械与机械学系惯性导航研究室于1997年研制出机载瞄准线稳定跟踪系统,并交付部队使用。 车载稳定平台的研究开始于80年代后期,最初用于坦克炮长镜上以稳定瞄准线,其原理是在框架陀螺的转子上安装导光棱镜,以达到稳定瞄准线的目的,其稳定精度可达到0.2mrad ,但瞄准范围仅仅是方位?±4、俯仰?+?-20~10,加之人机工程差,使用受到了