ModelSim-Altera对Nios+II仿真
(原創) 如何使用ModelSim-Altera對Nios II仿真? (SOC) (Nios II) (SOPC Builder) (ModelSim) (DE2)
Posted on 2008-08-02 16:14 真OO无双阅读(2869) 评论(16)编辑收藏网摘所属分类: SOPC Builder, SOC, Quartus II, Nios II, ModelSim
Abstract
在剛學習Nios II時,每次在Run As Nios II Hardware下方,看到Run As Nios II ModelSim就覺得很好奇,Nios II明明是嵌入式系統,怎麼能用ModelSim仿真呢? Introduction
使用環境:Quartus II 7.2 SP3 + Nios II EDS 7.2 SP3 + ModelSim-Altera 6.1g + DE2(Cyclone II EP2C35F627C6)
用ModelSim對數字系統作仿真,這個大家都很熟悉,在(原創) 如何解決在Quartus II無法使用ModelSim-Altera模擬的問題? (SOC) (Quartus II) (ModelSim)與(原創) 如何做functional simulation? (SOC) (Quartus II) (ModelSim)都曾經討論過。Nios II雖然是個嵌入式系統,但畢竟基於FPGA技術,所以比ARM這類hardcore 多了使用ModelSim仿真的方式。這也是Altera四大天王(Quartus II、Nios II EDS、ModelSim-Altera、DSP Builder)中的三大天王首次同台演出。
Altera在Simulating Nios II Embedded Processor Designs文件中,有談到如何用ModelSim-Altera對Nios II作仿真,不過一如以往,Altera的文件要在DE2能動,還是得做不少修改,昨晚弄了一晚也弄不出來,在大家常去的Altera Forum、Nios Forum與EDACN的討論中發現,真正做出來的人並不多。今天早上運氣好竟然成功了,趕快將心得記下來。
Quartus II與SOPC Builder部分
Step 1:
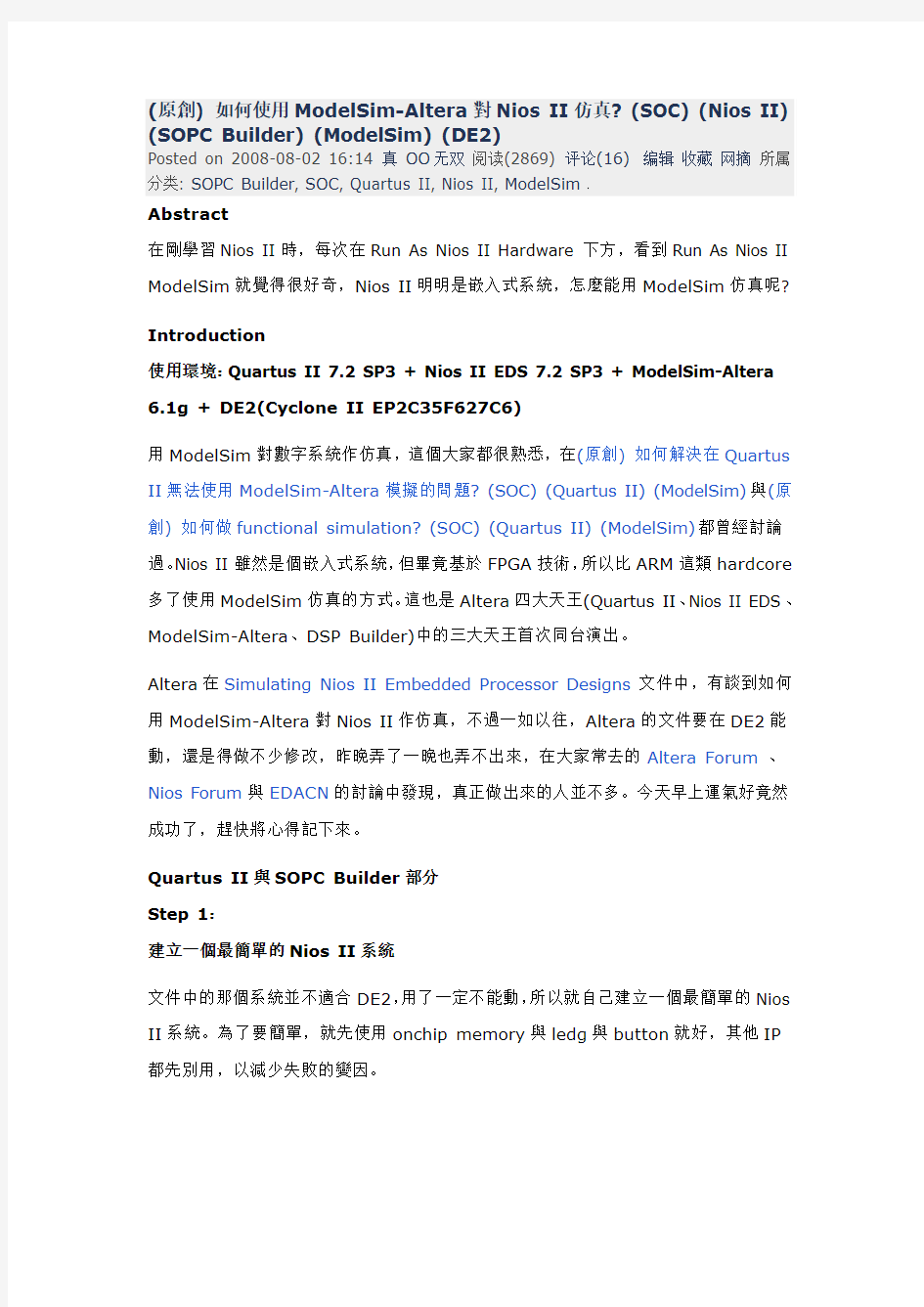
建立一個最簡單的Nios II系統
文件中的那個系統並不適合DE2,用了一定不能動,所以就自己建立一個最簡單的Nios II系統。為了要簡單,就先使用onchip memory與ledg與button就好,其他IP 都先別用,以減少失敗的變因。
Step 2:
JTAG UART設定
使用ModelSim-Altera仿真後,對於C的printf()要怎麼顯示呢?這要對JTAG UART 做設定。
Step 3:
對PIO做初始值設定
Button本來是在runtime由user去決定,若你想在testbench就模擬user的按鍵,可在此設定,此步驟並非必須,只是demo可藉由此方式設定PIO的初始值。
Step 4:
在SOPC Builder設定ModelSim-Altera路徑Tools -> Options -> Category:HDL Simulator
Step 5:
產生能仿真的Nios II系統
記得要將『Simulation. Create project simulator files』打勾。
Step 6:
DE2_NIOS_ModelSim2.v / Verilog
1/*
2(C) OOMusou 2008 https://www.360docs.net/doc/9811535621.html,
3
4Filename : DE2_NIOS_ModelSim2.v
5Compiler : Quartus II 7.2 SP3
6Description : Demo how to simulate Nios II by ModelSim-Altera 7Release : 08/02/2008 1.0
8*/
10module DE2_NIOS_ModelSim2 (
11input CLOCK_50,
12input [3:0] KEY,
13output [8:0] LEDG
14);
15
16wire CPU_CLK;
17wire CPU_RESET;
18
19Reset_Delay delay1 (
20 .iRST(KEY[0]),
21 .iCLK(CLOCK_50),
22 .oRESET(CPU_RESET)
23);
24
25SDRAM_PLL PLL1 (
26 .inclk0(CLOCK_50),
27 .c1(CPU_CLK)
28);
29
30nios_ii u0 (
31 .clk(CPU_CLK),
32 .reset_n(CPU_RESET),
33 .in_port_to_the_button_pio(KEY),
34 .out_port_from_the_ledg_pio(LEDG)
35);
36
37endmodule
25行
SDRAM_PLL PLL1 (
.inclk0(CLOCK_50),
.c1(CPU_CLK)
);
別被SDRAM_PLL嚇到了,只是借用這個PLL產生100 Mhz的clock給Nios II用,你也可以自己重新產生一個100 Mhz的clock而不用SDRAM_PLL。
Quartus II與SOPC Builder部分已經完成,編譯後可燒進DE2。
Nios II EDS部分
Step 1:
建立Hello World project
hello_world.c / C
1#include
2#include "system.h"
3#include "altera_avalon_pio_regs.h"
4
5int main() {
6int i;
7 printf("Hello from Nios II!\n");
8
9for(i = 0; i < 256; i++)
10 IOWR_ALTERA_AVALON_PIO_DATA(LEDG_PIO_BASE, i);
11
12return0;
13}
LEDG_PIO_BASE這個巨集跟文件的不一樣,因為在SOPC Builder中,我們已經使用了不同的名稱。
Step 2:
修改System Library設定
由於我們使用的onchip memory只有40K,正常的Nios II是無法執行的,所以必須做些設定,讓code size變小。在Altera原廠文件並沒有這一步,因為它用的是SDRAM夠大,根本不用考慮code size的問題。
選擇不支援C++會讓code size小一點,另外要勾選ModelSim only, no hardware。
設定讓gcc編譯出的code size小一點,若你對code size最佳化有興趣,建議參考(原創) 如何有效減少Nios II EDS所編譯程式碼大小? (IC Design) (Nios II)。
Step 3:
編譯Hello World且Run As Nios II ModelSim。
Nios II EDS部分已經完成,接著會出現ModelSim-Altera。
ModelSim-Altera部分
Step 1:
編譯Verilog
Quartus II已經產生好ModelSim的macro,你只要打s就可重新編譯,這是最危險的時刻,若會失敗都是出在這個時候,我之前曾經使用友晶的Nios II Reference
Design來做仿真,但有些module無法編譯成功,目前原因還不明。若成功編譯,會有以下的結果:
# Reading C:/altera/72/modelsim_ae/tcl/vsim/pref.tcl
# Reading D:/0Clare/DE2/DE2_NIOS_ModelSim2/nios_ii_sim/modelsim. tcl
# c:/altera/72/quartus//sopc_builder
# c:/altera/72/quartus//bin/perl
# Sopc_Builder Directory: c:/altera/72/quartus//sopc_builder
# @@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@
# @@
# @@ setup_sim.do
# @@
# @@ Defined aliases:
# @@
# @@ s -- Load all design (HDL) files.
# @@ re-vlog/re-vcom and re-vsim the design.
# @@
# @@ c -- Re-compile memory contents.
# @@ Builds C- and assembly-language programs
# @@ (and associated simulation data-files
# @@ such as UART simulation strings) for
# @@ refreshing memory contents.
# @@ Does NOT re-generate hardware (HDL) files
# @@ ONLY WORKS WITH LEGACY SDK (Not the Nios IDE)
# @@
# @@ w -- Sets-up waveforms for this design
# @@ Each SOPC-Builder component may have
# @@ signals 'marked'for display during
# @@ simulation. This command opens a wave-
# @@ window containing all such signals.
# @@
# @@ l -- Sets-up list waveforms for this design
# @@ Each SOPC-Builder component may have
# @@ signals 'marked'for listing during
# @@ simulation. This command opens a list-
# @@ window containing all such signals.
# @@
# @@ jtag_uart_drive -- display interactive input window for jta g_uart
# @@
# @@ h -- print this message
# @@
# @@
# OpenFile "nios_ii_sim.mpf"
# Loading project nios_ii_sim
s
# Model Technology ModelSim ALTERA vlog 6.1g Compiler 2006.08 Au g 122006
# -- Compiling module button_pio_s1_arbitrator
# -- Compiling module cpu_jtag_debug_module_arbitrator
# -- Compiling module cpu_data_master_arbitrator
# -- Compiling module cpu_instruction_master_arbitrator
# -- Compiling module jtag_uart_avalon_jtag_slave_arbitrator
# -- Compiling module ledg_pio_s1_arbitrator
# -- Compiling module onchip_mem_s1_arbitrator
# -- Compiling module sysid_control_slave_arbitrator
# -- Compiling module nios_ii_reset_clk_domain_synch_module
# -- Compiling module nios_ii
# -- Compiling module lcell
# -- Compiling module ALTERA_MF_MEMORY_INITIALIZATION # -- Compiling module ALTERA_MF_HINT_EVALUATION
# -- Compiling module ALTERA_DEVICE_FAMILIES
# -- Compiling module dffp
# -- Compiling module pll_iobuf
# -- Compiling module stx_m_cntr
# -- Compiling module stx_n_cntr
# -- Compiling module stx_scale_cntr
# -- Compiling module MF_pll_reg
# -- Compiling module MF_stratix_pll
# -- Compiling module arm_m_cntr
# -- Compiling module arm_n_cntr
# -- Compiling module arm_scale_cntr
# -- Compiling module MF_stratixii_pll
# -- Compiling module ttn_m_cntr
# -- Compiling module ttn_n_cntr
# -- Compiling module ttn_scale_cntr
# -- Compiling module MF_stratixiii_pll
# -- Compiling module cda_m_cntr
# -- Compiling module cda_n_cntr
# -- Compiling module cda_scale_cntr
# -- Compiling module MF_cycloneiii_pll
# -- Compiling module altpll
# -- Compiling module altlvds_rx
# -- Compiling module stratix_lvds_rx
# -- Compiling module stratixgx_dpa_lvds_rx
# -- Compiling module stratixii_lvds_rx
# -- Compiling module flexible_lvds_rx
# -- Compiling module stratixiii_lvds_rx
# -- Compiling module stratixiii_lvds_rx_channel
# -- Compiling module stratixiii_lvds_rx_dpa # -- Compiling module altlvds_tx
# -- Compiling module stratix_tx_outclk
# -- Compiling module stratixii_tx_outclk
# -- Compiling module flexible_lvds_tx
# -- Compiling module altaccumulate
# -- Compiling module altmult_accum
# -- Compiling module altmult_add
# -- Compiling module altfp_mult
# -- Compiling module altsqrt
# -- Compiling module altclklock
# -- Compiling module altddio_in
# -- Compiling module altddio_out
# -- Compiling module altddio_bidir
# -- Compiling module hssi_pll
# -- Compiling module MF_ram7x20_syn
# -- Compiling module hssi_fifo
# -- Compiling module hssi_rx
# -- Compiling module hssi_tx
# -- Compiling module altcdr_rx
# -- Compiling module altcdr_tx
# -- Compiling module altcam
# -- Compiling module altdpram
# -- Compiling module altsyncram
# -- Compiling module alt3pram
# -- Compiling module altqpram
# -- Compiling module parallel_add
# -- Compiling module scfifo
# -- Compiling module dcfifo_dffpipe
# -- Compiling module dcfifo_fefifo
# -- Compiling module dcfifo_async
# -- Compiling module dcfifo_sync
# -- Compiling module dcfifo_low_latency
# -- Compiling module dcfifo_mixed_widths
# -- Compiling module dcfifo
# -- Compiling module altshift_taps
# -- Compiling module a_graycounter
# -- Compiling module altsquare
# -- Compiling module signal_gen
# -- Compiling module jtag_tap_controller
# -- Compiling module dummy_hub
# -- Compiling module sld_virtual_jtag
# -- Compiling module sld_signaltap
# -- Compiling module altstratixii_oct
# -- Compiling module altparallel_flash_loader # -- Compiling module altserial_flash_loader
# -- Compiling module LPM_MEMORY_INITIALIZATION # -- Compiling module LPM_HINT_EVALUATION
# -- Compiling module LPM_DEVICE_FAMILIES
# -- Compiling module lpm_constant
# -- Compiling module lpm_inv
# -- Compiling module lpm_and
# -- Compiling module lpm_or
# -- Compiling module lpm_xor
# -- Compiling module lpm_bustri
# -- Compiling module lpm_mux
# -- Compiling module lpm_decode
# -- Compiling module lpm_clshift
# -- Compiling module lpm_add_sub
# -- Compiling module lpm_compare
# -- Compiling module lpm_mult
# -- Compiling module lpm_divide
# -- Compiling module lpm_abs
# -- Compiling module lpm_counter
# -- Compiling module lpm_latch
# -- Compiling module lpm_ff
# -- Compiling module lpm_shiftreg
# -- Compiling module lpm_ram_dq
# -- Compiling module lpm_ram_dp
# -- Compiling module lpm_ram_io
# -- Compiling module lpm_rom
# -- Compiling module lpm_fifo
# -- Compiling module lpm_fifo_dc_dffpipe # -- Compiling module lpm_fifo_dc_fefifo # -- Compiling module lpm_fifo_dc_async
# -- Compiling module lpm_fifo_dc
# -- Compiling module lpm_inpad
# -- Compiling module lpm_outpad
# -- Compiling module lpm_bipad
# -- Compiling module oper_add
# -- Compiling module oper_addsub
# -- Compiling module mux21
# -- Compiling module io_buf_tri
# -- Compiling module io_buf_opdrn
# -- Compiling module oper_mult
# -- Compiling module tri_bus
# -- Compiling module oper_div
# -- Compiling module oper_mod
# -- Compiling module oper_left_shift
# -- Compiling module oper_right_shift
# -- Compiling module oper_rotate_left
# -- Compiling module oper_rotate_right
# -- Compiling module oper_less_than
# -- Compiling module oper_mux
# -- Compiling module oper_selector
# -- Compiling module oper_decoder
# -- Compiling module oper_bus_mux
# -- Compiling module oper_latch
# -- Compiling module onchip_mem
# -- Compiling module cpu_test_bench
# -- Compiling module cpu_mult_cell
# -- Compiling module cpu_jtag_debug_module
# -- Compiling module cpu_jtag_debug_module_wrapper # -- Compiling module cpu
# -- Compiling module sysid
# -- Compiling module jtag_uart_log_module
# -- Compiling module jtag_uart_sim_scfifo_w
# -- Compiling module jtag_uart_scfifo_w
# -- Compiling module jtag_uart_drom_module
# -- Compiling module jtag_uart_sim_scfifo_r
# -- Compiling module jtag_uart_scfifo_r
# -- Compiling module jtag_uart
# -- Compiling module ledg_pio
# -- Compiling module button_pio
# -- Compiling module test_bench
#
# Top level modules:
# lcell
# altpll
# altlvds_rx
# altlvds_tx
# altaccumulate
# altmult_accum
# altfp_mult
# altsqrt
# altddio_bidir
# altcdr_rx
# altcdr_tx
# altcam
# altdpram
# alt3pram
# altqpram
# parallel_add
# scfifo
# dcfifo
# altshift_taps
# a_graycounter
# altsquare
# sld_virtual_jtag
# sld_signaltap
# altstratixii_oct
# altparallel_flash_loader # altserial_flash_loader
# lpm_constant
# lpm_inv
# lpm_and
# lpm_or
# lpm_xor
# lpm_bustri
# lpm_compare
# lpm_abs
# lpm_counter
# lpm_latch
# lpm_ff
# lpm_shiftreg
# lpm_ram_dq
# lpm_ram_dp
# lpm_ram_io
# lpm_rom
# lpm_fifo
# lpm_fifo_dc
# lpm_inpad
# lpm_outpad
# lpm_bipad
# oper_addsub
# mux21
# io_buf_tri
# io_buf_opdrn
# oper_mult
# tri_bus
# oper_div
# oper_mod
# oper_left_shift
# oper_right_shift # oper_rotate_left # oper_rotate_right # oper_mux
# oper_selector
# oper_decoder
# oper_bus_mux
# oper_latch
# test_bench
# vsim +nowarnTFMPC -L lpm_ver -L sgate_ver -L altera_mf_ver -L altgxb_ver -L stratixiigx_hssi_ver -L stratixgx_ver -L stratixg x_gxb_ver -L stratixiigx -L altera_ver -L stratixiii_ver -L stra tixii_ver -L cycloneii_ver -L cycloneiii_ver -t ps test_bench # // ModelSim ALTERA 6.1g Aug 12 2006
# //
# // Copyright 2006 Mentor Graphics Corporation
# // All Rights Reserved.
# //
# // THIS WORK CONTAINS TRADE SECRET AND
# // PROPRIETARY INFORMATION WHICH IS THE PROPERTY
# // OF MENTOR GRAPHICS CORPORATION OR ITS LICENSORS
# // AND IS SUBJECT TO LICENSE TERMS.
# //
# Loading work.test_bench
# Loading work.nios_ii
# Loading work.button_pio_s1_arbitrator
# Loading work.button_pio
# Loading work.cpu_jtag_debug_module_arbitrator
# Loading work.cpu_data_master_arbitrator
# Loading work.cpu_instruction_master_arbitrator
# Loading work.cpu
# Loading C:\altera\72\modelsim_ae\win32aloem/../altera/verilog /altera_mf.altsyncram
# Loading C:\altera\72\modelsim_ae\win32aloem/../altera/verilog /altera_mf.ALTERA_DEVICE_FAMILIES
# Loading C:\altera\72\modelsim_ae\win32aloem/../altera/verilog /altera_mf.ALTERA_MF_MEMORY_INITIALIZATION
法学虚拟仿真教学软件(系统)推荐
法学虚拟仿真教学软件(系统)推荐 虚拟仿真实验教学是指依托虚拟现实、多媒体、人机交互、数据库和网络通讯等信息技术,构建高度仿真的虚拟实验环境和实验对象,让学生在虚拟环境中开展实验,达到教学大纲所要求的教学效果的一种实验教学模式。对于传统的文科性法学专业而言,技术信息的快速发展也带来了一定的发展机遇和挑战。如何通过更为丰富的手段强化法学专业学生的实战能力,提高实务经验是摆在每个法学专业院校面前的十分严峻的任务。通过虚拟仿真技术手段,不仅可以有效改变传统教学所带来的机械、抽象和程式化的教学效果,同时借助于软件技术手段形成的具有自主知识产权的虚拟实验项目,将为本院校的综合教学和科研实力带来更高的发展平台。 教育部要求各高校应将建设和使用虚拟仿真实验教学项目作为推进完善现有实践教学体系、提高实验教学质量的重要举措。加大对实验教学队伍的培养培训,着力提升信息技术与实验教学深度融合的意识、使用信息技术改造传统实验教学项目的能力和水平。根据实验教学计划和实际情况,在坚持“能实不虚”的基础上加大虚拟仿真实验教学项目建设力度,探索线上线下教学相结合的新型实验教学模式。加强对虚拟仿真实验教学项目应用管理,建立健全适应网络化学习的实验教学成绩考核评价指标体系,促进实验教学质量稳步提高。 教育部的总体规划,引导了法学专业虚拟仿真实验项目建设的方向,也为各高校开展法学虚拟仿真实验项目建设带来了发展契机。但是毋庸置疑,如何建设适合本学校本专业特色的虚拟仿真实验项目,教育部并没有提供可行的蓝本和具体路径。例如选择什么形式的虚拟仿真实验项目课题?如何吸收和发挥本校的专业优势和特色?选择哪一个切入点进行虚拟仿真实验项目设计?相关的硬件需要哪些指标性要求?如何选择适用配套的软件?如何将动画或3D技术嵌入到具体的虚拟仿真实验项目?为了实现本公司面向各大高校提供法学专业教学服务的宗旨,本公司结合多年来与各大高校的合作经验,认真研究了法学专业建设虚拟仿真实验项目的可行性模式以及相关的硬件和软件建设方法,为本公司服务用户提供具有一定参考意义的法学虚拟仿真实验项目设计方案。 杭州法源软件开发有限公司是业界良好的高校教学软件和解决方案供应商,专注法学专业;是目前法学领域内专业成熟的法学实践教学软件研发团队;凭借
矩形谐振腔电磁场的FDTD分析和Matlab仿真
矩形谐振腔电磁场的FDTD分析和Matlab仿真 摘要:目前,电磁场的时域计算方法越来越引人注目。这种方法已经广泛应用到各种电磁问题的分析之中。而将Matlab作为一种仿真工具,用于时域有限差分法,可以简化编程,使研究者重心放在FDTD本身上,而不必在编程上花费过多的时间。本课题通过用FDTD方法计算矩形谐振腔电磁场分布,并用Matlab 进行仿真。 关键词:时域有限差分法,Matlab仿真,矩形谐振腔 1.引言 时域有限差分法(Finite-Dfference Time-Domain Method)是求解电磁问题的一种数值技术,是在1966年由K.S.Yee第一次提出的。FDTD法直接将有限差分式代替麦克斯韦时域场旋度方程中的微分式,得到关于场分量的有限差分式,用具有相同电参量的空间网格去模拟被研究体,选取合适的场始值和计算空间的边界条件,可以得到包括时间变量的麦克斯韦方程的四维数值解,通过傅里叶变换可求得三维空间的频域解。时域有限差分法突出的优点是所需的存储量及计算时间与N成正比,使得很多复杂的电磁场计算问题成为可能,用时域有限差分法容易模拟各种复杂的结构,使得用其他方法不能解决的问题有了新的处理方法。 本文主要讨论如何用Matlab语言来编写FDTD的吸收边界条件以及编程时应注意的问题。 2时域有限差分法的基本理论 2.1 时域有限差分法的简介 1966年K.S.Yee首次提出了一种电磁场数值计算的新方法——时域有限差分(Finite-Dfference Time-Domain Method)方法。对电磁场E、H分量在时间和空间上采取交替抽样的离散方式,每一个E(或H)场分量四周有四个H(或E)场分量环绕,应用这种离散方式将含时间变量的麦克斯韦旋度方程转化为一组差分方程,并在时间轴上逐步推进地求解空间电磁场。Yee提出的这种抽样方式后来被称为Yee元胞。 FDTD方法是求解麦克斯韦方程的直接时域方法。在计算中将空间某一样本点的电场(或磁场)与周围格点的磁场(或电场)直接相关联,且介质参数已赋值给空间每一个元胞,因此这一方法可以处理复杂形状目标和非均匀介质物体的电磁散射、辐射等问题。同时FDTD的随时间推进可以方便地给出电磁场的时间演化过程,在计算机上以伪彩色方式显示,这种电磁场可视化结果清楚的显示了物理过程,便于分析和设计。 2.2 FDTD数值计算的优势 FDTD算法,其空间节点采用Yee元胞的方法,电场和磁场节点空间与时间上都采用交错抽样,因而使得麦克斯韦旋度方程离散后构成显示差分方程,相比较宇前面的波动方程求解,计算等到大大简化。由于FDTD采用吸收边界条件的
斯沃数控仿真广数车床操作和编程
斯沃数控仿真广数车床操作和编程
目录 第一章斯沃数控仿真软件概述 (2) 1.1 斯沃数控仿真软件简介 (2) 1.2 斯沃数控仿真软件的功能 (2) 1.2.1 控制器 (2) 1.2.2功能介绍 (3) 第二章斯沃数控仿真软件操作 (5) 2.1 软件启动界面 (5) 2.1.1 试用版启动界面 (5) 2.1.2网络版启动界面 (8) 2.1.3单机版启动界面 (8) 2.2 工具条和菜单的配置 (9) 2.3 文件管理菜单 (9) 2.3.1机床参数 (13) 2.3.2刀具管理 (13) 2.3.3工件参数及附件 (15) 2.3.4快速模拟加工 (18) 2.3.5工件测量 (18) 2.3.6录制参数设置 (19) 2.3.7警告信息 (19) 第三章GSK980T操作 (23) 3.1 GSK980T机床面板操作 (23) 3.2 GSK980T数控系统操作 (25) 3.2.1 按键介绍 (26) 3.2.2 手动操作虚拟数控车床 (28) 第四章GSK980T车床编程 (41) 4.1坐标系统 (41) 4.2G代码命令 (41) 4.2.1G代码组及含义 (42) 4.2.2 G代码解释 (42) 4.3辅助功能(M功能) (57) 4.4例题 (58)
第一章斯沃数控仿真软件概述 1.1 斯沃数控仿真软件简介 南京斯沃软件技术有限公司开发FANUC、SINUMERIK、MITSUBISHI、广州数控GSK、华中世纪星HNC、北京凯恩帝KND、大连大森DASEN数控车铣及加工中心仿真软件,是结合机床厂家实际加工制造经验与高校教学训练一体所开发的。通过该软件可以使学生达到实物操作训练的目的,又可大大减少昂贵的设备投入。 斯沃数控仿真软件具有FANUC、SINUMERIK、MITSUBISHI、广州数控GSK、华中世纪星HNC、北京凯恩帝KND系统、大连大森DASEN编程和加工功能,学生通过在PC机上操作该软件,能在很短时间内掌握各系统数控车、数控铣及加工中心的操作,可手动编程或读入CAM数控程序加工,教师通过网络教学,可随时获得学生当前操作信息,根据学生掌握的情况进行教育,既节省了成本和时间,从而提高学生的实际操作水平。 1.2 斯沃数控仿真软件的功能 1.2.1 控制器 1.实现屏幕配置且所有的功能与FANUC工业系统使用的CNC数控机床一样。 2.实时地解释NC代码并编辑机床进给命令。 3.提供与真正的数控机床类似的操作面板。 4.单程序块操作,自动操作,编辑方式,空运行等功能。 5.移动速率调整, 单位毫米脉冲转换开关等。
虚拟仿真软件在机械专业教学中的应用实践
龙源期刊网 https://www.360docs.net/doc/9811535621.html, 虚拟仿真软件在机械专业教学中的应用实践作者:华剑徐小兵 来源:《大学教育》2020年第02期 [摘要]该研究结合新工科建设和工程教育专业认证工程的背景,提出了将虚拟仿真软件用于机械专业教学的方法。总体介绍了机械行业虚拟仿真软件的种类、特点、功能以及适用的课程,详细阐述了SolidWorks、Ansvs、Adams和Matlab这四种软件在机械原理、机械设计、机械控制工程基础等课程的应用、实践表明,将上述软件用于机械专业学生的培养,有助于提高学生的创新能力和解决复杂工程问题的能力。 [关键词]机械专业;虚拟仿真软件;创新能力;教学 [中图分类号]G642[文献标识码]A[文章编号]2095-3437(2020) 02-0014-03 近年来,随工程教育中“新工科”建设的快速开展和工程教育专业认证工作的不断推进,国内各高校在机械工程专业的教学中越来越强调对学生科技创新能力和解决复杂T程问题能力的培养[l]。要培养上述能力,离不开科学的实践教学体系和完善的校内外实验基地建设[2]。但目前大多普通本科高校的机械专业实践教学面临如下困难:一是资金、场地和实验人员有限,不能满足培养方案对实践教学所占学时、学分比例以及实验室软硬件建设的要求。二是考虑到对企业管理、安全生产、经济效益等方面的影响,机械制造企业对学生实习实践的接纳程度逐年下降。三是由于教学组织、教学手段和教学方法的原因,部分实践环节的现场教学,对提高学生能力的作用有限。四是实验设备使用频繁,需要定期维护及检修,出故障的概率较高,不利于实践教学的顺利开展。借助于计算机性能的提高、网络技术的发展以及机械工程仿真软件的推广,虚拟仿真实验为解决机械专业实践教学的上述问题提供了有效手段。虚拟仿真教学已在能源动力工程等专业[3]、机械原理、机械设计[4-6]等课程的实践教学中得到了广泛应用,对 现场实践教学形成了有益补充,并成了机械工程教育中的热点。 长江大学机械设计制造及其自动化专业是湖北省品牌专业、教育部特色专业,于2012年人选教育部卓越工程师教育培养计划。在我校机械设计制造及其自动化专业的课程体系中,机械原理、机械设计、机械创新设计、机器人技术基础、工程流体力学与流体机械、毕业设计等课程与教学环节与工程实践结合较为紧密。由于受到传统教学观念、教材内容和教学硬件设施的限制,在以往的教学实践中,教师们主要将重点放在学生对理论知识的理解和考试知识点的掌握上,平时作业主要以公式计算为主,考试主要强调学生对概念、理论公式的记忆,而不太重视学生对理论知识在工程实际中的应用,从而导致学生会推导公式、能够考高分,但不知如何将理论知识运用于工程实践的情况,这就造成了人才培养与企业需求的脱节。为了使人才培养契合新工科与专业认证的要求,近年来,在专业课程教学中,我们结合石油装备行业背景与
圆极化波及其MATLAB仿真-西电电子教案
电磁场与电磁波大作业圆极化波及其MATLAB仿真 专业:信息对抗技术班级:021231 学生姓名: 指导教师:黄丘林
一、引言 电磁波电场强度的取向和幅值随时间而变化的性质,在光学中称为偏振。如果这种变化具有确定的规律,就称电磁波为极化电磁波(简称极化波)。如果极化电磁波的电场强度始终在垂直于传播方向的(横)平面内取向,其电场矢量的端点沿一闭合轨迹移动,则这一极化电磁波称为平面极化波。电场的矢端轨迹称为极化曲线,并按极化曲线的形状对极化波命名,其主要分类有线极化波,圆极化波和椭圆极化波。 二、原理详解 下面我们详细分析圆极化波的产生条件。 假设均匀平面电磁波沿+Z 方向传播,电场强度矢量E 频率和传播方向均相同的两个分量 x E 和 y E ,电场强度矢量的表达式为 -00()(1)()y x x X y y jkz x x y y j j jkz x xm y ym E E E E e E e E e e φ φ-=+=+=+E a a a a a a 电场强度矢量的两个分量的瞬时值为 cos()(2)cos() (3) x xm x y ym y E E t kz E E t kz ωφωφ=-+=-+ 设,,0, 2 xm ym m x y E E E z π φφ==-=± = 那么式(2)式(3)变为 cos()cos() 2 x m x y y y E E t E E t ωφπωφ=+=+m 消去t 得 22 ()()1y x m m E E E E += 此方程就是圆方程。电磁波的两正交电场强度分量的合成电场强度矢量E
的模和幅角分别依次为 (4)sin(t )arctan[](t ) (5)cos(t ) m x x x E E ωφαωφωφ==±+==±++ 由式(4)和式(5)可见,电磁波的合成电场强度矢量的大小不随时间变化,而其余x 轴正向夹角α将随时间变化。因此合成的电场强度矢量的矢端轨迹为圆,故称为圆极化。 三、仿真分析 下面我们用MATLAB 进行仿真分析。 假设电磁波为圆极化波,且沿+z 方向传播,则其电场强度矢量轨迹如下图一所示: x 电场强度矢量 y z 图一 而当固定位置观察圆极化波的矢端轨迹,其结果如下图二:
浅谈斯沃数控仿真软件在数控教学中的应用
中等职业学校专业骨干教师国家级培训 文章题目: 浅谈数控仿真软件在数控教学中的应用 姓名: 李小军 所在省市: 安徽省合肥市 所在单位: 安徽肥西花岗职业高级中学
浅谈数控仿真软件在数控教学中的应用(南京斯沃数控仿真软件) 摘要:数控加工仿真是利用计算机来模拟实际的加工过程,是验证数控加工程序正确性和切削过程的有力工具。随着数控加在机械制造业中的广泛应用,数控操作者的大量培训便成为迫切的问题。各职业技术学校紧扣市场需求,大力发展数控加工专业。为了缓解学生多、数控设备少的矛盾.很多职业学校利用仿真加工软件进行数控加工的编程和操作训练.这样不仅可迅速提高操作者的素质,而且安全可靠、费用低。另外应用数控加工模拟仿真软件,可以激发学生学习数控的积极性,来提高教学效果和实训效果,解决了实训中存在的一些问题。使实践教学达到事半功倍的效果。 关键词:数控技术;数控编程操作;仿真软件;数控实训 引言 随着现代技术的飞速发展,数控技术已经成为衡量制造业发展水平的重要标志之一,也是衡量一个国家综合国力的重要标志,是现代机械制造业的核心技术。由于数控技术在机械制造业中的重要性,国内一些高、中职院校陆续在机械专业开设了数控课程。但由于教学条件的限制,许多学校只能传授理论知识,而不能将理论付诸于实践。既不能培养学生的实际应用能力如数控编程能力、数控机床的操作能力及系统的维护能力,也不能培养学生数控技术的开发能力。这样培养出来的学生毕业后走上工作岗位不能很快地在数控技术的应用与开发方面独当一面。 数控机床科技含量高,品种繁多、价格较高,一台数控车床通常需十来万,数控铣床则一般需二三十万,而一台数控加工中心价格更高,少则几十万多则几百万。作为中职学校,就一个班五十人来说,则至少需投入同种机床10几台,才能展开正常的实训教学工作,所以投入至少上百万,同时数控机床的实训消耗多,成本高,比如刀具、工件材料的消耗,每生少则也需好几十元。所以数控机床的操作训练若完全依赖数控机床进行实作训练,即使是实力雄厚的培训院校和企业既无必要也无力承担起此种消耗与投入。因此探索一种新的数控加
电磁场的Matlab仿真.
Matlab 与电磁场模拟 一单电荷的场分布: 单电荷的外部电位计算公式: q φ= 4πε0r 等位线就是连接距离电荷等距离的点,在图上表示就是一圈一圈的圆,而电力线就是由点向 外辐射的线。 MATLAB 程序: theta=[0:.01:2*pi]'; r=0:10; x=sin(theta*r; y=cos(theta*r; plot(x,y,'b' x=linspace(-5,5,100; for theta=[-pi/4 0 pi/4] y=x*tan(theta; hold on ; plot(x,y; end grid on 单电荷的等位线和电力线分布图: 二多个点电荷的电场情况: 模拟一对同号点电荷的静电场 设有两个同号点电荷, 其带电量分别为 +Q1和+Q2(Q1、Q2>0 距离为 2a 则两 电荷在点P(x, y处产生的电势为: 由电场强度可得E = -?U, 在xOy 平面上, 电场强度的公式为: 为了简单起见, 对电势U 做如下变换:
。 Matlab 程序: q=1; xm=2.5; ym=2; x=linspace(-xm,xm; y=linspace(-ym,ym; [X,Y]=meshgrid(x,y; R1=sqrt((X+1.^2+Y.^2; R2=sqrt((X-1.^2+Y.^2; U=1./R1+q./R2; u=1:0.5:4; figure contour(X,Y,U,u grid on legend(num2str(u' hold on
plot([-xm;xm],[0;0] plot([0;0],[-ym;ym] plot(-1,0,'o' , 'MarkerSize' ,12 plot(1,0,'o' , 'MarkerSize' ,12 [DX,DY] = gradient(U; quiver(X,Y,-DX,-DY; surf(X,Y,U; 同号电荷的静电场图像为: 50 40 30 20 10 0-2 2
斯沃数控机床调试与维修仿真软件说明书
南京斯沃 斯沃数控机床调试与维修仿真软件说明书 南京斯沃软件技术有限公司 2009/07版本
前言 南京斯沃软件技术有限公司是一支专业从事可视化软件开发的队伍。主要提供CAD/CAM、数控仿真的推广和应用。面向企业的新产品开发和创新设计,提供贴近用户个性化需求的产品整体设计、技术咨询。根据客户要求进行专业CAD/CAM的软件开发,以及数控系统、面板仿真的开发,缩短新产品研发周期,降低改型设计开发成本,提高产品设计质量。 随着数控机床的广泛使用,数控机床维修技术人才的需求已迫在眉睫,庞大的市场需求与掌握专业技能人才的奇缺使得数控维修工程师更是“一将难求”。南京斯沃软件技术有限公司为配合学校培养该专业人才,开发出数控机床调试与维修仿真软件(以下简称维修仿真软件)。该软件是以数控机床电气及多年从事数控维修教学教授、专家的教学经验,利用计算机三维虚拟现实技术、将数控机床结构、电气元器件布局调试以及故障排查过程等通过微机活灵活现地显示出来。数控维修软件适合本科、高职、高专、技校等不同层次人才培养的需求,适用于数控技术、机电一体化、数控设备与维修、自动控制、工业自动化等相关专业,是国内第一款专业化程度非常高的维修仿真软件。 斯沃维修仿真软件直观、安全、易学易用、上手快、经济性好。通过本软件可以学到数控机床的电气安装、数控系统参数调试、交流
伺服参数调试、变频器参数调试、数控机床故障诊断与维修技术以及PLC编程等专业技术。同时本软件可以丰富教师的教学手段、提高学生的学习兴趣,增强学生的实际动手能力,无疑是投资少、见效快的必选软件。 南京斯沃软件技术有限公司 2009年7月 3 / 55
远程虚拟仿真实验室教学系统
电力电子虚拟仿真教学实验平台 实验室建设背景 目前的高等教育中,越来越强调对学生实践能力的培养,实验教育成为理工科教育的一个至关重要的环节。然而,随着各学科实验项目和学生人数的增多,传统的电气实验室和实验仪器数量很难满足学生的需求,在教学和学生使用上的不便之处也慢慢凸现出来。如何解决传统实验教学资源分配不足、实验方式过于刻板、实验器材维护费时费力、实验内容固定难以拓展等问题,是目前新工科建设、课程改革内容中一个讨论的热点。 在对创新型实验建设的需求日益明确之际,仿真实验教学的概念开始成为学校关注的重点。仿真教学实验是一种基于软件技术构建的虚拟实验教学系统,是现有各种教学实验室的数字化和虚拟化,为开设各种专业实验课程提供了全新的教学与科研环境。因此建设仿真实验室可以与实物实验室互补,它除了可以辅助高校的科研工作,在实验教学方面也具有如利用率高,易维护等诸多优点。近年来,国内的许多高校都根据自身科研和教学的需求建立了一些高科技的仿真实验室。 远宽解决方案 远宽能源除了将仿真技术应用于科研与工业测试,也率先将该技术引入到了教学实验室建设中。对于不同的实验内容与实验类型,远宽能源提出了如下的仿真实验建设的解决方案:实时仿真实验和远程虚拟仿真实验。
1. 实时仿真实验 远宽能源将先进的FPGA小步长实时仿真技术应用到教学实验室建设中,小步长实时仿真技术使它能够覆盖电力电子、电机驱动、新能源等多个电力电子相关应用的创新教学实验以及研究的需求。基于图形化系统建模,模型一键下载,无需FPGA编程编译,大大增强了产品的易用性;同时实验平台还配置了硬件控制器(TI的DSP或者NI的GPIC),和仿真器构成完整的闭环系统。实时仿真实验系统如下图所示:
工业机器人工程应用虚拟仿真教程教学提纲
工业机器人工程应用虚拟仿真教程教学提纲 一、说明 1?'课程的性质和内容 《工业机器人工程应用虚拟仿真教程》课程是髙级技工学校工业机器人应用与维护专业的专业课。主要内容包括:Robot Studio软件的操作、建模、Smart 组建的使用、轨迹离线编程、动画效果的制作、模拟工作站的构建、仿真验证以及在线操作。 2?课程的任务和要求 本课程的主要任务是培养学生熟练操作Robot Studio软件,并能通过Robot StiMio 软件对工业机器人进行应用开发、调试、现场维护,为学生从事工业机器人工程技术人员打下的必要的专业基础。 通过本课程的学习,学生应该达到以下儿个方面的专业基础。 (1)了解Robot Studio工业机器人仿真软件的基础知识,掌握软件使用方法和技巧。 (2)掌握构建基本仿真工业机器人工作站的方法。 (3)能熟练在Robot Studio软件中创建工件、工具模型。 (4)掌握工业机器人离线轨迹编程方法。 (5)掌握Smart组建的应用。 (6)掌握带导轨和变位机的机器人系统创建于应用方法。 (7)了解ScreenMaker示教器用户自定义界面的操作。 (8)掌握Robot Studio软件的在线功能。 3?教学中注意的问题 (1)本课程教学最好采用理论与实际相结合的一体化教学方式,借助多媒体网络教室,一人一机,使用多媒体课件讲解与软件操作相结合。 (2)理论教学中应帮助学生总结并灵活运用所学的相关知识,本着够用的原则讲授,切忌面面俱到。对工业机器人仿真操作不作深入探讨,仅作一般性了解。 (3)实践教学环节中对工业机器人Robot Studio仿真软件常用功能作简单介绍,重点培养学生使用软件对工业机器人进行基本操作、功能设置、二次开发、在线监控与编程、方案设讣和检验。教师教学中多联系生产实际并选用一些工业上经典的匸业机器人使用案例进行讲解,提高学生对工业机器人进行应用开发、调试、现场维护的能力。 二、学时分配表
车床对刀详细图解与手动编程-斯沃数控仿真软件
,FANUC OiT为车床,FANUC OiM为铣床。 右下方面板, 一、基础设置: 1、机床开关,程序保护,1行5 (第一行第5个按钮)归零,点X轴归零,Z 轴归零,右上面板出现 2、最上面的命令栏:机床操作,机床参数,设为前置刀架,四方刀架。 机床操作,刀具管理,或左边命令栏的图标,选中编号001,添加到刀盘,1号刀位。 如果再装一把刀,则需把刀架转过一个角度。JOG手动进给(1行6),再点(1行10) 3、上面第二行命令栏,可以显示机床,显示切削液,显示刀架,显示刀号。
二、开始对刀: 1、第二行命令栏,切换为二维显示, MDI手动输入方式(1行3),点右上角操作面板的程序,左边界面窗口,点MDI下面的按键, ,输入MO3S500,(M03为主轴正转,转速S为500r/min),回车换行,得到,插入 (点,可选择上下指令。输错编程字母就取消,删除,替换,选择 上下字母。) 2、回到右下面板。循环启动(5行2),JOG手动进给(1行6),点,再点 和,使车刀Z方向靠近工件;点,使车刀X方向靠近工件。如果觉得速度太慢,可点快速进给。 3、微调。点击右上面板,切换到坐标方式。回到右下面板,(1行8)手轮进给。 再点击机床界面左上角,,打开手轮界面,方向指向Z,倍率为X100。慢慢接近工件,观察右上面板的坐标,直到大概越过右端面0.5到1mm。再换X调节。
结果如图 4、在Z方向对刀,需试切一刀。Z方向保持不变,点,再,直到越过轴线(白线) 。再从X方向退出,。点右上面板,,点补正,然后形状,点把光标移动到Z向,输入Z0,,再点测量,Z轴对刀完成。 5、在X方向对刀。点,在切外圆,X方向不变,。再沿Z方向退出。停主轴,点。
虚拟仿真实训平台在实践教学的应用-教育文档
虚拟仿真实训平台在实践教学的应用 1虚拟仿真技术的现状 随着互联网技术及虚拟仿真技术的飞速发展,虚拟仿真实训平台平台这一教育资源也逐渐受到了教育界人士的青睐。目前国内投入运营的虚拟仿真实训平台平台屈指可数,以西南交通大学龙绪明教授为例,其率领团队开发的《SMT虚拟实践平台》已于2015 年初完成,目前被西南交通大学、北京理工学院使用;辽宁省交通高等专科学校的《地铁线路控制虚拟仿真》也在轨道交通工程系的实训课程中使用。这些虚拟教学手段的使用在教学过程中改善了教学效果。 2虚拟仿真实训平台的特点 2.1可制定“理、虚、实”一体化的实践教学计划,将虚拟仿真训练有效的应用于实践教学环节中 原有的“理- 实”教学模式是利用现有的实验实训教学环境结合理论内容来进行教学,实践教学过程中,受到实验实训环境不完善、实验耗材昂贵、实验实训环境安全隐患等诸多因素制约,影响了实训的效果,不能达到职业教育对实践教学的要求。在融入了虚拟仿真实训平台基地环境之后,很大程度上解决了上述问题,并且可以在任何时间、地点、终端的情况下进行实践训练,构建出“理、虚、实”一体化的实践教学模式,切实提升学生的实践动手能力。
2.2可设计小概率事件训练方案,在虚拟环境中反复训练学生解决实际生产操作中所出现的故障、问题,避免学生在真实生 产中误操作导致安全事故 电气设备、机械设备对操作者的熟练程度要求比较高,在不熟悉设备的情况下往往会面临高电压、高温度的危险,误操作会导致操作者的受伤或生产企业的损失。虚拟仿真实训平台应用于实践教学,将让学生在面对真实设备前,实现对设备的原理、设备的外观、操作方法、注意事项、小概率事件及维修保养等各个生产环节的熟练掌握,最大程度为学生提供安全保障。 3虚拟仿真实训平台应用研究的必要性 2016年底,辽宁省教育厅将对开发的七个虚拟仿真实训平台基地进行验收,虚拟仿真实训平台基地即将投入运营,如何充分利用虚拟仿真实训平台平台,发挥其在实践教学中的作用,正实现“理、虚、实教学一体化”的问题已迫在眉睫。 通过本文的探讨,为虚拟仿真实训平台基地的开发注入新的思路,并为虚拟仿真实训平台基地的合理使用提供理论依据;丰富虚拟仿真实训平台基地平台的应用及推广体系,为虚拟仿真实训平台平台的应用和推广提供更多建设性的可操作方案。 通过对照传统实训基地教学模式,充分发掘虚拟仿真实训平台基地的教学优势,创建以虚拟仿真实训平台为主体的实践教学模式;利用虚拟仿真技术完善传统实践教学环节,构建科学合理的“理、虚、实”一体化实践教学体系。
电磁场的Matlab仿真
Matlab 与电磁场模拟 一 单电荷的场分布: 单电荷的外部电位计算公式: 等位线就是连接距离电荷等距离的点,在图上表示就是一圈一圈的圆,而电力线就是由点向外辐射的线。 MATLAB 程序: theta=[0:.01:2*pi]'; r=0:10; x=sin(theta)*r; y=cos(theta)*r; plot(x,y,'b') x=linspace(-5,5,100); for theta=[-pi/4 0 pi/4] y=x*tan(theta); hold on ; plot(x,y); end grid on 单电荷的等位线和电力线分布图: r q 04πεφ=
二多个点电荷的电场情况: 模拟一对同号点电荷的静电场 设有两个同号点电荷,其带电量分别为+Q1和+Q2(Q1、Q2>0 )距离为2a则两电荷在点P(x, y)处产生的电势为: 由电场强度可得E = -?U,在xOy平面上,电场强度的公式为: 为了简单起见,对电势U做如下变换: 。 Matlab程序:
q=1; xm=; ym=2; x=linspace(-xm,xm); y=linspace(-ym,ym); [X,Y]=meshgrid(x,y); R1=sqrt((X+1).^2+Y.^2); R2=sqrt((X-1).^2+Y.^2); U=1./R1+q./R2; u=1::4; figure contour(X,Y,U,u) grid on legend(num2str(u')) hold on plot([-xm;xm],[0;0]) plot([0;0],[-ym;ym]) plot(-1,0,'o','MarkerSize',12) plot(1,0,'o','MarkerSize',12) [DX,DY] = gradient(U); quiver(X,Y,-DX,-DY); surf(X,Y,U); 同号电荷的静电场图像为:
虚拟仿真实验教学中心平台建设方案
湖北警官学院虚拟仿真实验教学建设方案 一、方案背景 虚拟仿真实验教学是高等教育信息化建设和实验教学示范中心建设的重要内容,是学科专业与信息技术深度融合的产物。为贯彻落实《教育部关于全面提高高等教育质量的若干意见》(教高〔2012〕4号)精神,根据《教育信息化十年发展规划(2011-2020年)》,教育部决定于2013年启动开展国家级虚拟仿真实验教学中心建设工作。其中虚拟仿真实验教学的管理和共享平台是中心建设的重要内容之一。 目前,大多数高校都有针对课程使用实验教学软件,但由于每个专业或课程的情况不同,购买的软件所采用的工作环境、体系结构、编程语言、开发方法等也各不相同。由于学校管理工作的复杂性,各校乃至校内各专业的实验教学建设大都自成体系,各自为政,形成了“信息孤岛”。主要面临如下问题:? 管理混乱,各种实验教学软件缺乏统一的集中管理。 ? 使用不规范,缺乏统一的操作模式和管理方式; ? 可扩展性差,无法支持课程和相应实验的扩展; ? 各系统的数据无法共享,容易形成“信息孤岛”; ? 缺乏足够的开放性; ? 软件部署复杂,不同的软件不能运行在同一台服务器上; 二、方案目标 该方案的目标就是高效管理实验教学资源,实现校内外、本地区及更广范围内的实验教学资源共享,满足多地区、多学校和多学科专业的虚拟仿真实验教学的需求。平台要实现学校购置的所有实验软件统一接入和学生在平台下进行统一实验的目的,通过系统间的无缝连接,使之达到一个整体的实验效果,学校通过该平台的部署,不仅可以促进系统的耦合度,解决信息孤岛的问题,还可以使学校能够迅速实施第三方的实验教学软件。 平台提供了全方位的虚拟实验教学辅助功能,包括:门户网站、实验前的理论学习、实验的开课管理、典型实验库的维护、实验教学安排、实验过程的智能指导、实验结果的自动批改、实验成绩统计查询、在线答疑、实验教学效
数控仿真的作用
1.采用数控仿真,知识掌握牢固 斯沃数控仿真软件独有的刀具轨迹显示技术与刀路调试技术,是在数控机床上实训难以做到的,这些技术非常适合于教学,可使学习者扎实掌握各种指令的加工效果,知识掌握牢固。 如图1所示,只要程序一编好,刀具轨迹就显示在工件上,马上可以发现编程有无错误,对刀及工件坐标系设置有无问题。而且仿真加工时,刀具可以精确地沿着轨迹运动。 图1 如图2所示,斯沃数控仿真软件独有的刀路调试技术,你点到程序的哪一行就可对应突显刀具轨迹,这可使学习者牢固掌握各种指令,而且便于检查错误。 图2 2.采用数控仿真,学习效率高 斯沃数控仿真软件独有的快速对刀与设置工件坐标系技术,避免了在数控机床上长达数十分钟的对刀操作,可将更多时间放在验证数控程序上,学习效率高。 斯沃数控仿真软件拥有完善的对刀操作,如铣床拥有基准芯棒及塞尺对刀、偏心寻边器对刀和光电寻边器对刀。但如果每仿真一个程序,都进行对刀操作将很耽误时间,而且显示不出数控仿真软件效率高的优势。 如图3所示,斯沃数控仿真软件在车床仿真时采用快速定位,将刀具快速定位在毛坯
的外形轮廓端点上,然后在刀具表中输入毛坯直径和长度实现快速对刀。 图3 图4 如图4所示,斯沃数控仿真软件在铣床仿真时,通过“设置毛坯”对话框,可将毛坯上已选好的工件原点直接存入G54寄存器中,避免了繁琐的而费时的对刀操作,实现了快速设置工件坐标系,提高了学习效率。 随着数控仿真技术的发展,数控仿真软件与数控机床的差距越来越小,特别是斯沃数控仿真软件支持极坐标、螺旋插补及各种循环指令编程,支持各系统子程序及宏程序编程,支持镜像、缩放及旋转等简化编程指令编程,特别是近来加入变量刀具补偿指令及直线和圆弧后倒直角、倒圆角指令的仿真,使得在斯沃数控仿真软件里仿真加工可以达到与真实机床完全一样的效果。
斯沃数控机床调试与维修仿真软件说明书
斯沃数控机床调试与维修仿真软件说明书
南京斯沃 斯沃数控机床调试与维修仿真软件说明书
操作编程软件斯沃数控仿真软件概述 南京斯沃软件技术有限公司 2009/07版本
前言 南京斯沃软件技术有限公司是一支专业从事可视化软件开发的队伍。主要提供CAD/CAM、数控仿真的推广和应用。面向企业的新产品开发和创新设计,提供贴近用户个性化需求的产品整体设计、技术咨询。根据客户要求进行专业CAD/CAM的软件开发,以及数控系统、面板仿真的开发,缩短新产品研发周期,降低改型设计开发成本,提高产品设计质量。 随着数控机床的广泛使用,数控机床维修技术人才的需求已迫在眉睫,庞大的市场需求与掌握专业技能人才的奇缺使得数控维修工程师更是“一将难求”。南京斯沃软件技术有限公司为配合学校培养该专业人才,开发出数控机床调试与维修仿真软件(以下简称维修仿真软件)。该软件是以数控机床电气及多年从事数控维修教学教授、专家的教学经验,利用计算机三维虚拟现实技术、将数控机床结构、电气元器件布局调试以及故障排查过程等通过微机活灵活现地显示出来。数控维修软件适合本科、高职、高专、技校等不同层次人才培养的需求,适用于数控技术、机电一体化、数控设备与维修、自动控制、工业自动化等相关专业,是国内第一款专业化程度非常高的维修仿真软件。 斯沃维修仿真软件直观、安全、易学易用、上手快、经济性好。通过本软件可以学到数控机床的电气安装、数控系统参数调试、交流
伺服参数调试、变频器参数调试、数控机床故障诊断与维修技术以及PLC编程等专业技术。同时本软件可以丰富教师的教学手段、提高学生的学习兴趣,增强学生的实际动手能力,无疑是投资少、见效快的必选软件。 南京斯沃软件技术有限公司 2009年7月
铣床对刀详细图解与手动编程-斯沃数控仿真软件
, FANUC OiM为铣床。是铣床加工中心。 右下方面板, 一、基础设置: 1、机床开关,程序保护,1行5 (第一行第5个按钮)归零,点X轴归零,Y轴归零,Z 轴归零,右上面板出现 显示模式-床身显示模式,切换三种模式。 2、更换刀架类型:最上面的命令栏:机床操作,机床参数,。 3、机床操作,刀具管理,或左边命令栏的图标,选中编号001,添加到刀盘,1号刀位。 MDI手动输入方式(1行3),点右上角操作面板的程序,左边界面窗口,点MDI下面的按键, ,输入M06T01;,(记得点EOB键,最后加分号“;”),插入,注意:接着把光标移动到程序的开头,不然会出现无法换刀。再回到右下面板,
循环启动(5行2)。装刀完毕, 工件操作-工件放置,调节工件在托架的位置。 工件操作-工件装夹-平口钳装夹,加紧上下调整,使工件突出平口钳。 二、开始对刀 1、 MDI手动输入方式(1行3),点右上角操作面板的程序,左边界面窗口,点MDI下面的按键,,输入MO3S500,(M03为主轴正转,转速S为500r/min),回车换行,得到, 插入。(点,可选择上下指令。输错编程字母就取消,删除,替换,选择 上下字母)。回到右下面板。循环启动(5行2) 2、点击上方第二栏,XZ平面视图。JOG手动进给(1行6),点,使工件的 中点大概对正刀具的中心。如果觉得速度太慢,可点快速进给。点,把刀往下走。调整X、Y和Z方向(注意不要漏了Y方向,如果显示刀已切入工件,但没出现铁屑,则检查 Y方向)。微调时用(1行8)手轮进给,再点击机床界面左上角,,打开手轮界面,方向指向Z,倍率为X100。直到轻轻碰到工件的左侧面。。
( VR虚拟现实)虚拟仿真实训系统解决方案
(VR虚拟现实)虚拟仿真实训系统解决方案
大娱号 虚拟仿真实训系统解决方案VSTATIONHD(V1.0)
前言 近年来,由于信息技术的快速发展与国家教育部门的大力提倡,虚拟仿真实训在高职教育中开始得到广泛的应用,成为实训教学重要的组成部分和提高教学质量的重要手段。虚拟仿真技术是将多媒体技术、虚拟现实技术与网络通信技术等信息技术进行集成,构建一个与现实世界的物体和环境相同或相似的虚拟教学环境,并通过虚拟环境集成与控制为数众多的实体,构成一个虚拟仿真教学系统。虚拟仿真教学技术以提高学生的技能水平为核心,具有多感知性、沉浸性、交互性、构想性等特点。这些特点有益于教师的实训教学和学生专业核心技能的训练,为解决职业教育面临的实训难、实习难和就业难等问题开辟了一条新思路。目前,高职院校很多专业,如外语教学、旅游专业、数控技术、焊接技术、机电技术、食品加工、服装设计等专业都引入了虚拟仿真实训教学方式。虚拟仿真实训教学,已经逐渐成为高职院校教学变革的一种有效手段。
目录 前言2 一、总体需求分析4 1.1 “情景”的定义:4 1.2 为什么要在教学中使用“虚拟仿真实训系统”?5 1.3 根据教学建设,用户需求归纳如下:6 二、设计原则7 三、大娱号虚拟仿真实训系统概述8 四、大娱号虚拟仿真实训系统系统运行原理示意图:10 五、大娱号虚拟仿真实训系统构成及特点11 六、与教材同步完备的虚拟场景库16 七、大娱号虚拟仿真实训系统构成及特点18 八、大娱号虚拟仿真实训系统配置与指标19 九、系统技术支持及服务21
一、总体需求分析 通过运用学语言,已经为越来越多的教师认同。学习者必须通过“用语言”才能真正掌握语言。 让学生置身于真实的交际情景中,让学生使用语言进行交际。而真正的交际应该是互动的。当一方发出信息后,另一方根据上下文进行意义协商,作出反馈,他可以表示支持、进行反驳或提出疑问,然后接受方对反馈意见再进行意义协商,作出回应,双方如此反复交流,形成互动。互动是“交际的核心”。 语言课堂就是一个充满“交流和互动”的场所。在课堂教学中,这种互动不仅包括师生互动和生生之间互动,还应该包括教材,因为课堂上的师生互动和生生互动都是基于一定教材展开的。“大娱号”虚拟仿真实训系统能够在教材与师生之间搭起一座互动教学的桥梁。 使用“虚拟仿真实训系统”在互动教学的设计和组织上突出情景性、实训性和互动性,力求三者有机结合。 1.1“情景”的定义: 情景指的是具体场合的情形或景象。在教学过程中引入或创设生动具体的场景,有利于学生进行意义建构使其产生交际的动机。“大娱号”虚拟仿真实训系统所提供的虚拟场景可以提供直观生动的形象,通过大屏或投影再现学生在虚拟场景中的表演,可以让学生通过视觉和听觉去感受场景,产生想象和联想,激发学生的学习兴趣。参与表演的学生可以身临其境的学语言,使用虚拟仿真实训系统教学,学生觉得有话可说,有戏可演,可以
华科电磁场matlab仿真作业
华科电磁场m a t l a b仿真作 业 -标准化文件发布号:(9456-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII
电磁场作业 电气1202 XXX U201200000一.作业一 1.程序框图
2.程序 clear; col = 61; %第一行点数 row = col; %行数 span = 0.3/(col-1); %步长 End = ones(1,col)*col; %每一行的终止点 Start = ones(1,col); %每一行的起始点 A = zeros(row,col); %A矩正存储每点电势 for i = (col-1)/3+1:(col-1)*2/3+1
for j = (col-1)/3+1:(col-1)*2/3+1 A(i,j) =100; end end %初始化电势完毕 temp = A; for n= 1:500 %迭代次数 for i = 2:row-1 if ( i<((col-1)/3+1)||i>( (col-1)*2/3+1 ) ) for j = Start(i)+1:End(i)-1 temp(i,j)=(A(i-1,j) +A(i+1,j) +A(i,j-1) +A(i,j+1))/4; end else for j = 2:(col-1)/3 temp(i,j)=(A(i-1,j) +A(i+1,j) +A(i,j-1) +A(i,j+1))/4; end for j = 2*(col-1)/3+2:col-1 temp(i,j)=(A(i-1,j) +A(i+1,j) +A(i,j-1) +A(i,j+1))/4; end end A = temp; end end X = row:-1:1; Y = col:-1:1; [X,Y] = meshgrid(X,Y); figure(1); surf(rot90(A,2)); figure(2); contour(rot90(A,2)); hold on; [Gx,Gy] = gradient(A,1,1); quiver(Gx,Gy); 3.计算机绘图
斯沃数控机床调试与维修仿真软件介绍说明手册
// 南京斯沃 斯沃数控机床调试与维修仿真软件说明书 南京斯沃软件技术有限公司 2009/07版本
前言 南京斯沃软件技术有限公司是一支专业从事可视化软件开发的队伍。主要提供CAD/CAM、数控仿真的推广和应用。面向企业的新产品开发和创新设计,提供贴近用户个性化需求的产品整体设计、技术咨询。根据客户要求进行专业CAD/CAM的软件开发,以及数控系统、面板仿真的开发,缩短新产品研发周期,降低改型设计开发成本,提高产品设计质量。 随着数控机床的广泛使用,数控机床维修技术人才的需求已迫在眉睫,庞大的市场需求与掌握专业技能人才的奇缺使得数控维修工程师更是“一将难求”。南京斯沃软件技术有限公司为配合学校培养该专业人才,开发出数控机床调试与维修仿真软件(以下简称维修仿真软件)。该软件是以数控机床电气及多年从事数控维修教学教授、专家的教学经验,利用计算机三维虚拟现实技术、将数控机床结构、电气元器件布局调试以及故障排查过程等通过微机活灵活现地显示出来。数控维修软件适合本科、高职、高专、技校等不同层次人才培养的需求,适用于数控技术、机电一体化、数控设备与维修、自动控制、工业自动化等相关专业,是国内第一款专业化程度非常高的维修仿真软件。 斯沃维修仿真软件直观、安全、易学易用、上手快、经济性好。通过本软件可以学到数控机床的电气安装、数控系统参数调试、交流
伺服参数调试、变频器参数调试、数控机床故障诊断与维修技术以及PLC编程等专业技术。同时本软件可以丰富教师的教学手段、提高学生的学习兴趣,增强学生的实际动手能力,无疑是投资少、见效快的必选软件。 南京斯沃软件技术有限公司 2009年7月