机器学习十大算法的每个算法的核心思想、工作原理、适用情况及优缺点
5-1简述机器学习十大算法的每个算法的核心思想、工作原理、适用情况及优缺点等。
1)C4.5算法:
ID3算法是以信息论为基础,以信息熵和信息增益度为衡量标准,从而实现对数据的归纳分类。ID3算法计算每个属性的信息增益,并选取具有最高增益的属性作为给定的测试属性。
C4.5算法核心思想是ID3算法,是ID3算法的改进,改进方面有:1)用信息增益率来选择属性,克服了用信息增益选择属性时偏向选择取值多的属性的不足;
2)在树构造过程中进行剪枝
3)能处理非离散的数据
4)能处理不完整的数据
C4.5算法优点:产生的分类规则易于理解,准确率较高。
缺点:
1)在构造树的过程中,需要对数据集进行多次的顺序扫描
和排序,因而导致算法的低效。
2)C4.5只适合于能够驻留于内存的数据集,当训练集大得
无法在内存容纳时程序无法运行。
2)K means算法:
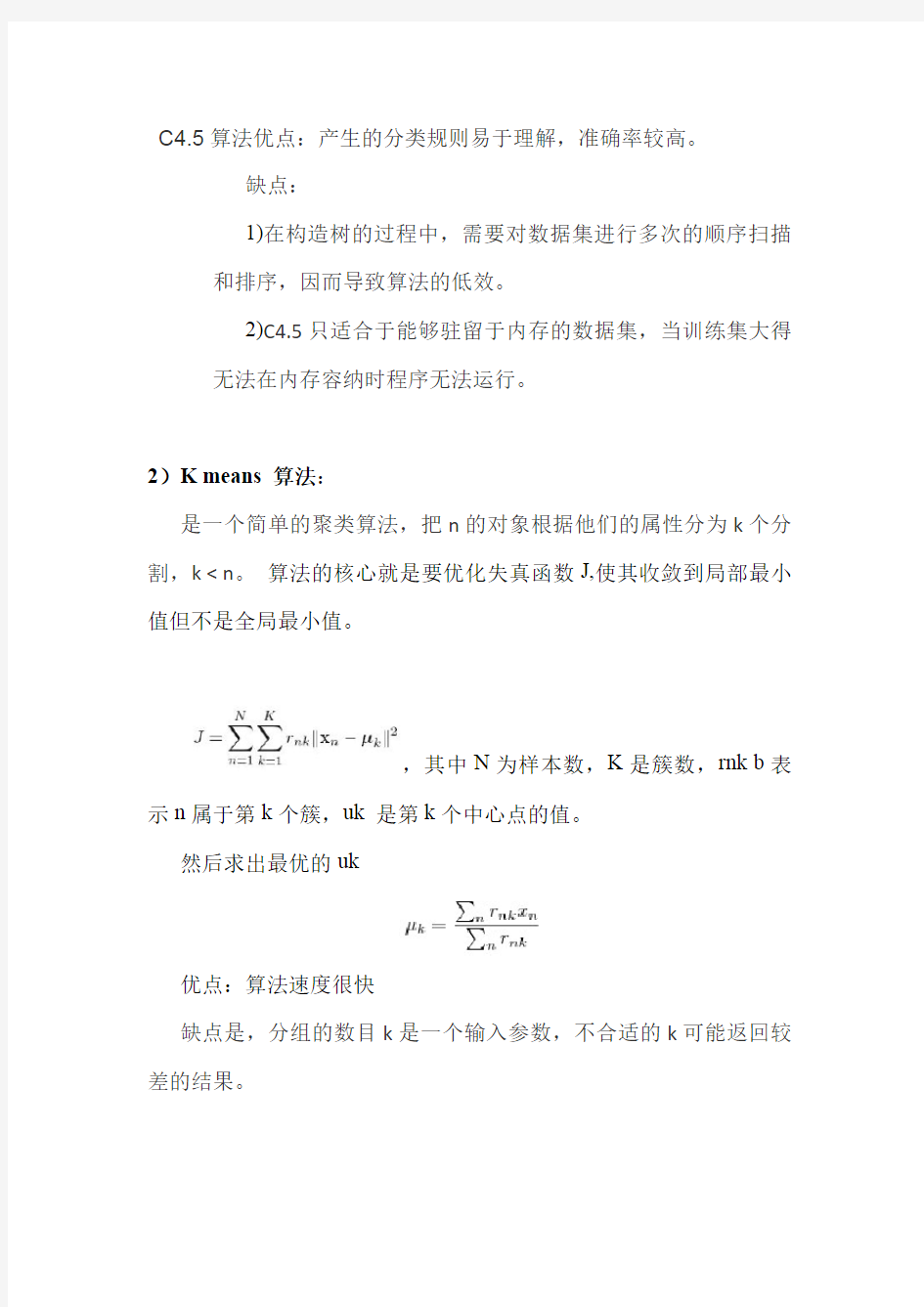
是一个简单的聚类算法,把n的对象根据他们的属性分为k个分割,k ,其中N为样本数,K是簇数,rnk b表示n属于第k个簇,uk是第k个中心点的值。 然后求出最优的uk 优点:算法速度很快 缺点是,分组的数目k是一个输入参数,不合适的k可能返回较差的结果。 3)朴素贝叶斯算法: 朴素贝叶斯法是基于贝叶斯定理与特征条件独立假设的分类方法。算法的基础是概率问题,分类原理是通过某对象的先验概率,利用贝叶斯公式计算出其后验概率,即该对象属于某一类的概率,选择具有最大后验概率的类作为该对象所属的类。朴素贝叶斯假设是约束性很强的假设,假设特征条件独立,但朴素贝叶斯算法简单,快速,具有较小的出错率。 在朴素贝叶斯的应用中,主要研究了电子邮件过滤以及文本分类研究。 4)K最近邻分类算法(KNN) 分类思想比较简单,从训练样本中找出K个与其最相近的样本,然后看这k个样本中哪个类别的样本多,则待判定的值(或说抽样)就属于这个类别。 缺点: 1)K值需要预先设定,而不能自适应 2)当样本不平衡时,如一个类的样本容量很大,而其他类样本容量很小时,有可能导致当输入一个新样本时,该样本的K个邻居中大容量类的样本占多数。 该算法适用于对样本容量比较大的类域进行自动分类。 5)EM最大期望算法 EM算法是基于模型的聚类方法,是在概率模型中寻找参数最大似然估计的算法,其中概率模型依赖于无法观测的隐藏变量。E步估计隐含变量,M步估计其他参数,交替将极值推向最大。 EM算法比K-means算法计算复杂,收敛也较慢,不适于大规模数据集和高维数据,但比K-means算法计算结果稳定、准确。EM经常用在机器学习和计算机视觉的数据集聚(Data Clustering)领域。 6)PageRank算法 是google的页面排序算法,是基于从许多优质的网页链接过来的网页,必定还是优质网页的回归关系,来判定所有网页的重要性。(也就是说,一个人有着越多牛X朋友的人,他是牛X的概率就越大。)优点: 完全独立于查询,只依赖于网页链接结构,可以离线计算。 缺点: 1)PageRank算法忽略了网页搜索的时效性。 2)旧网页排序很高,存在时间长,积累了大量的in-links,拥有最新资讯的新网页排名却很低,因为它们几乎没有in-links。 7)AdaBoost Adaboost是一种迭代算法,其核心思想是针对同一个训练集训练不同的分类器(弱分类器),然后把这些弱分类器集合起来,构成一个 更强的最终分类器(强分类器)。其算法本身是通过改变数据分布来实现的,它根据每次训练集之中每个样本的分类是否正确,以及上次的总体分类的准确率,来确定每个样本的权值。将修改过权值的新数据集送给下层分类器进行训练,最后将每次训练得到的分类器最后融合起来,作为最后的决策分类器。 整个过程如下所示: 1.先通过对N个训练样本的学习得到第一个弱分类器; 2.将分错的样本和其他的新数据一起构成一个新的N个的训练样本,通过对这个样本的学习得到第二个弱分类器; 3.将和都分错了的样本加上其他的新样本构成另一个新的N 个的训练样本,通过对这个样本的学习得到第三个弱分类器; 4.如此反复,最终得到经过提升的强分类器。 目前AdaBoost算法广泛的应用于人脸检测、目标识别等领域。 8)Apriori算法 Apriori算法是一种挖掘关联规则的算法,用于挖掘其内含的、未知的却又实际存在的数据关系,其核心是基于两阶段频集思想的递推算法。 Apriori算法分为两个阶段: 1)寻找频繁项集 2)由频繁项集找关联规则 算法缺点: 1)在每一步产生侯选项目集时循环产生的组合过多,没有排除不应该参与组合的元素; 2)每次计算项集的支持度时,都对数据库中的全部记录进行了一遍扫描比较,需要很大的I/O负载。 9)SVM支持向量机 支持向量机是一种基于分类边界的方法。其基本原理是(以二维数据为例):如果训练数据分布在二维平面上的点,它们按照其分类聚集在不同的区域。基于分类边界的分类算法的目标是,通过训练,找到这些分类之间的边界(直线的――称为线性划分,曲线的――称为非线性划分)。对于多维数据(如N维),可以将它们视为N维空间中的点,而分类边界就是N维空间中的面,称为超面(超面比N 维空间少一维)。线性分类器使用超平面类型的边界,非线性分类器使用超曲面。 支持向量机的原理是将低维空间的点映射到高维空间,使它们成为线性可分,再使用线性划分的原理来判断分类边界。在高维空间中是一种线性划分,而在原有的数据空间中,是一种非线性划分。 SVM在解决小样本、非线性及高维模式识别问题中表现出许多特有的优势,并能够推广应用到函数拟合等其他机器学习问题中。 10)CART分类与回归树 是一种决策树分类方法,采用基于最小距离的基尼指数估计函数,用来决定由该子数 据集生成的决策树的拓展形。如果目标变量是标称的,称为分类树;如果目标变量是连续的,称为回归树。分类树是使用树结构算法将数据分成离散类的方法。 优点 1)非常灵活,可以允许有部分错分成本,还可指定先验概率分布,可使用自动的成本复杂性剪枝来得到归纳性更强的树。 2)在面对诸如存在缺失值、变量数多等问题时CART显得非常稳健。 机器学习10大算法 什么是机器学习呢? 从广泛的概念来说,机器学习是人工智能的一个子集。人工智能旨在使计算机更智能化,而机器学习已经证明了如何做到这一点。简而言之,机器学习是人工智能的应用。通过使用从数据中反复学习到的算法,机器学习可以改进计算机的功能,而无需进行明确的编程。 机器学习中的算法有哪些? 如果你是一个数据科学家或机器学习的狂热爱好者,你可以根据机器学习算法的类别来学习。机器学习算法主要有三大类:监督学习、无监督学习和强化学习。 监督学习 使用预定义的“训练示例”集合,训练系统,便于其在新数据被馈送时也能得出结论。系统一直被训练,直到达到所需的精度水平。 无监督学习 给系统一堆无标签数据,它必须自己检测模式和关系。系统要用推断功能来描述未分类数据的模式。 强化学习 强化学习其实是一个连续决策的过程,这个过程有点像有监督学习,只是标注数据不是预先准备好的,而是通过一个过程来回调整,并给出“标注数据”。 机器学习三大类别中常用的算法如下: 1. 线性回归 工作原理:该算法可以按其权重可视化。但问题是,当你无法真正衡量它时,必须通过观察其高度和宽度来做一些猜测。通过这种可视化的分析,可以获取一个结果。 回归线,由Y = a * X + b表示。 Y =因变量;a=斜率;X =自变量;b=截距。 通过减少数据点和回归线间距离的平方差的总和,可以导出系数a和b。 2. 逻辑回归 根据一组独立变量,估计离散值。它通过将数据匹配到logit函数来帮助预测事件。 下列方法用于临时的逻辑回归模型: 添加交互项。 消除功能。 正则化技术。 使用非线性模型。 3. 决策树 利用监督学习算法对问题进行分类。决策树是一种支持工具,它使用树状图来决定决策或可能的后果、机会事件结果、资源成本和实用程序。根据独立变量,将其划分为两个或多个同构集。 决策树的基本原理:根据一些feature 进行分类,每个节点提一个问题,通过判断,将数据分为两类,再继续提问。这些问题是根据已有数据学习出来的,再投 国内外工业机器人品牌盘点 自改革开放以来,全球制造业向中国的迁移造就了我国成为“世界工厂”的局面。但随着国内外经济环境的变化,我国当当前的制造业也面临着前所未有的挑战,劳动力成本的上升、供给的下降、人口红利的消失,以及制造工厂对质量、成本、效率以及安全要求的不断提高,激发着我国企业逐步向自动化的转型。 目前,在全球范围内工业机器人技术日趋成熟,机器人俨然已经成为一种标准设备而在工业自动化行业中被广泛应用,如此一来国内外也产生了一批在较有影响力的知名工业机器人企业。 1. 瑞典ABB机器人 瑞典ABB机器人集团总部位于瑞士苏黎世,是目前世界行最大的机器人制造企业。1974年,ABB机器人成功研发了全球第一台市售全电动微型处理器控制的工业机器人IRB6,主要应用于工件的取放和物料的搬运。一年后,ABB持续发力,又生产出了全球第一台焊接机器人。直至1980年兼并Trallfa喷涂机器人,ABB机器人在产品结构上趋向于完备。 二十世纪末,为了更好的扩张与发展,ABB机器人进军中国市场,于1999年成立上海ABB。上海ABB是ABB在华工业机器人以及系统业务(机器人)、仪器仪表(自动化产品)、变电站自动化系统(电力系统)和集成分析系统(工程自动化)的主要生产基地。 ABB机器人生产的工业机器人主要应用于:焊接、装配、铸造、密封涂胶、材料处理、包装、喷漆、水切割等领域。 2. 德国库卡(KUKA)机器人 德国库卡成立于于1898年,是具有百年历史的知名企业,最初主要专注于室内及城市照明。但不久之后,库卡就涉足至其它领域(焊接工具及设备,大型容器),1966年更是成为了欧洲市政车辆的市场领导者。1973年,库卡研发了名为FAMULUS第一台工业机器人,到了1995年,库卡机器人技术脱离库卡焊接及机器人独立。现今,库卡专注于向工业生产过程提供先进的自动化解决方案。 KUKA库卡机器人(上海)是库卡在德国意外开设的全球首家海外工厂,主要生产库卡工业机器人和控制台,应用于汽车焊接及组建等工序,其产量占据了库卡全球生产总量的三分之一。 库卡机器人主要产品包括:Scara及六轴工业机器人、货盘堆垛机器人、作业机器人、架装式机器人、冲压连线机器人、焊接机器人、净室机器人、机器人系统和单元。 2012研究生机器视觉课程检测及课程设计内容 一、回答下列问题: 1、什么是机器视觉,它的目标是什么?能否画出机器视觉检测系统的结构方 块图,并说出它们的工作过程原理和与人类视觉的关系? 机器视觉是机器(通常指计算机)对图像进行自动处理并报告“图像中有什么”的过程,也就是说它识别图像中的内容。图像中的内容往往是某些机器零件,而处理的目标不仅要能对机器零件定位,还要能对其进行检验。 原始数据特征向量类别标识 特征度量模式分类器 机器视觉系统的组成框图 2、在机器视觉检测技术中:什么是点视觉技术、一维视觉技术、二维视觉技 术、三维视觉技术、运动视觉技术、彩色视觉技术、非可见光视觉技术等? 能否说出他们的应用领域病句、案例?能否描述它们的技术特点? 答:点视觉:用一个独立变量表示的视觉称之为点视觉。如应用位移传感器测量物体的移动速度。 一维视觉:普通的CCD。 两维视觉:用两个独立变量表示的视觉称之为两维视觉。比如普通的CCD。 三维视觉:用三个独立变量表示的视觉称之为三维视觉。比如用两个相机拍摄(双目视觉);或者使用一个相机和一个辅助光源。 彩色视觉:用颜色作为变量的视觉称之为彩色视觉。物体的颜色是由照 射光源的光谱成分、光线在物体上反射和吸收的情况决定的。比如,一 个蓝色物体在日光下观察呈现蓝色,是由于这个物体将日光中的蓝光 反射出来,而吸收了光谱中的其他部分的光谱,而同样的蓝色物体, 在红色的光源照射下,则呈现红紫色, 非可见光视觉技术:用非可见光作为光源的视觉技术。比如非可见光成像技术。 3、机器视觉检测技术中:光源的种类有哪些?不同光源的特点是什么?光照 方式有几种?不同光照方式的用途是什么?又和技术特点和要求? 机器视觉检测技术中光源有以下几种:荧光灯,卤素灯+光纤导管,LED 光源,激光,紫外光等。几种光源的特点如下: 成本亮度稳定度使用寿命复杂设计温度影响种类名 称 荧光灯低差差一般低一般 卤素灯+光纤导管高好一般差一般差LED光源一般一般好好高低光照方式有以下几种: 背景光法(背光照射)是将被测物置于相机和光源之间。这种照明方式的优点是可将被测物的边缘轮廓清晰地勾勒出来。由于在图像中,被测物所遮挡的部分为黑色,而未遮挡的部分为白色,因此形成“黑白分明”的易于系统分析的图像。此方法被应用于90%的测量系统中。 前景光法(正面照射)是将灯源置于被测物和相机之前。又可分为明场照射和暗场照射。明场照射是为了获得物体的几乎全部信息,照射物体的光在视野范围之内几乎全部反射回去;暗场照射是为了获取物体表面的凹凸,照射物体的光在视野范围之外有部分光反射回去。 同轴光法是将灯源置于被测物和相机之间。 4、机器视觉检测系统中,光学系统的作用是什么?光学器件有哪几种,它们 各自的作用是什么?光学镜头有几种类型,它们各自有何用途?光学镜头有哪些技术参数,各自对测量有什么影响? 答:机器视觉检测系统中,光学系统用来采集物体的轮廓、色彩等信息。 光学器件主要有:镜头、成像器件(CCD和CMOS)、光圈、快门等。 镜头的作用是对成像光线进行调焦等处理,使成像更清晰;成像器件的作用是将光学图像转换成模拟电信号;光圈的作用如同人得瞳孔, 控制入射光的入射量,实现曝光平衡;快门的作用是将想要获取的光学 机器学习中常见的几种优化方法 阅读目录 1. 梯度下降法(Gradient Descent) 2. 牛顿法和拟牛顿法(Newton's method & Quasi-Newton Methods) 3. 共轭梯度法(Conjugate Gradient) 4. 启发式优化方法 5. 解决约束优化问题——拉格朗日乘数法 我们每个人都会在我们的生活或者工作中遇到各种各样的最优化问题,比如每个企业和个人都要考虑的一个问题“在一定成本下,如何使利润最大化”等。最优化方法是一种数学方法,它是研究在给定约束之下如何寻求某些因素(的量),以使某一(或某些)指标达到最优的一些学科的总称。随着学习的深入,博主越来越发现最优化方法的重要性,学习和工作中遇到的大多问题都可以建模成一种最优化模型进行求解,比如我们现在学习的机器学习算法,大部分的机器学习算法的本质都是建立优化模型,通过最优化方法对目标函数(或损失函数)进行优化,从而训练出最好的模型。常见的最优化方法有梯度下降法、牛顿法和拟牛顿法、共轭梯 度法等等。 回到顶部 1. 梯度下降法(Gradient Descent) 梯度下降法是最早最简单,也是最为常用的最优化方法。梯度下降法实现简单,当目标函数是凸函数时,梯度下降法的解是全局解。一般情况下,其解不保证是全局最优解,梯度下降法的速度也未必是最快的。梯度下降法的优化思想是用当前位置负梯度方向作为搜索方向,因为该方向为当前位置的最快下降方向,所以也被称为是”最速下降法“。最速下 降法越接近目标值,步长越小,前进越慢。梯度下降法的搜索迭代示意图如下图所示: 牛顿法的缺点: (1)靠近极小值时收敛速度减慢,如下图所示; (2)直线搜索时可能会产生一些问题; (3)可能会“之字形”地下降。 从上图可以看出,梯度下降法在接近最优解的区域收敛速度明显变慢,利用梯度下降法求解需要很多次的迭代。 在机器学习中,基于基本的梯度下降法发展了两种梯度下降方法,分别为随机梯度下降法和批量梯度下降法。 Chapter10 CART:Classi?cation and Regression Trees Dan Steinberg Contents 10.1Antecedents (180) 10.2Overview (181) 10.3A Running Example (181) 10.4The Algorithm Brie?y Stated (183) 10.5Splitting Rules (185) 10.6Prior Probabilities and Class Balancing (187) 10.7Missing Value Handling (189) 10.8Attribute Importance (190) 10.9Dynamic Feature Construction (191) 10.10Cost-Sensitive Learning (192) 10.11Stopping Rules,Pruning,Tree Sequences,and Tree Selection (193) 10.12Probability Trees (194) 10.13Theoretical Foundations (196) 10.14Post-CART Related Research (196) 10.15Software Availability (198) 10.16Exercises (198) References (199) The1984monograph,“CART:Classi?cation and Regression Trees,”coauthored by Leo Breiman,Jerome Friedman,Richard Olshen,and Charles Stone(BFOS),repre-sents a major milestone in the evolution of arti?cial intelligence,machine learning, nonparametric statistics,and data mining.The work is important for the compre-hensiveness of its study of decision trees,the technical innovations it introduces,its sophisticated examples of tree-structured data analysis,and its authoritative treatment of large sample theory for trees.Since its publication the CART monograph has been cited some3000times according to the science and social science citation indexes; Google Scholar reports about8,450citations.CART citations can be found in almost any domain,with many appearing in?elds such as credit risk,targeted marketing,?-nancial markets modeling,electrical engineering,quality control,biology,chemistry, and clinical medical research.CART has also strongly in?uenced image compression 179 国内外工业机器人厂商 在国外,工业机器人技术日趋成熟,已经成为一种标准设备而得到工业界广泛应用,从而也形成了一批在国际上较有影响力的、著名的工业机器人公司。她们包括:瑞典的ABB Robotics,瑞士Staubli公司日本的FANUC、Yaskawa,德国的KUKA Roboter,美国的Adept Technology、American Robot、Emerson Industrial Automation、S-T Robotics,意大利COMAU,英国的AutoTech Robotics,加拿大的Jcd International Robotics,以色列的Robogroup Tek公司,这些公司已经成为其所在地区的支柱性企业。在国内,工业机器人产业刚刚起步,但增长的势头非常强劲。如中国科学院沈阳自动化所投资组建的新松机器人公司,年利润增长在40%左右。 一、国外主要机器人公司 1、瑞典ABB Robotics公司 ABB公司是世界上最大的机器人制造公司。1974年,ABB公司研发了全球第一台全电控式工业机器人-IRB6,主要应用于工件的取放和物料的搬运。1975年,生产出第一台焊接机器人。到1980年兼并Trallfa喷漆机器人公司后,机器人产品趋于完备。至2002年,ABB公司销售的工业机器人已经突破10万台,是世界上第一个突破10万台的厂家。ABB公司制造的工业机器人广泛应用在焊接、装配、铸造、密封涂胶、材料处理、包装、喷漆、水切割等领域。 公司网址:https://www.360docs.net/doc/9c12749532.html,/robotics 2、瑞士Staubli公司 史陶比尔将其在机械运动控制方面的经验和优势应用在工业机器人上。先成功开发并生产了以坚固、可靠和修正尺寸而著称的TX、RX系列机器人手臂后,又拥有了高速、精确、安全的新一代SCARARS系列工业机器人。史陶比尔现在的工业机器人与过去相比,具有更快的速度,更高的精度,更好的灵活性和更友好的用户环境。史陶比尔采用了创造性的专利技术,集成了无间隙的齿轮减速系统,结合了高性能的控制器,从而保证了精确的轨迹控制和最佳的过程参数管理。根据各行业的需求而设计出一系列不同应用范围的专业机器人,可以直接集成到各个生产设备中,其主要应用领域包括:镭射和水注入切割,抛光打磨,装配搬运,喷涂,精加工等。 史陶比尔公司为您提供优质的客户服务,以保证*和TX系列机器人销售和售后服务。在史陶比尔杭州公司还设立了亚太地区的配件服务中心。我们还提供包含机器人各个方面的培训:操作员的课程,编程培训,维护培训,其中有专门根据您需要开设的特殊课程。当您在应用开发,编程和系统集成时,我们将给与全部的技术支持。史陶比尔工业机器人凭借其快速、精确和灵活的特点,为您提供完美的解决方案。 公司网址:https://www.360docs.net/doc/9c12749532.html,/web/robot/division.nsf 3、日本FANUC公司 FANUC公司的前身致力于数控设备和伺服系统的研制和生产。1972年,从日本富士通公司的计算机控制部门独立出来,成立了FANUC公司。FANUC公司包括两大主要业务,一是工业机器人,二是工厂自动化。2004年,FANUC公司的营业总收入为2648亿日元,其中工业机器人(包括注模机产品)销售收入为1367亿日元,占总收入的51.6%。 其最新开发的工业机器人产品有: (1)R-2000iA系列多功能智能机器人。具有独特的视觉和压力传感器功能,可以将随意堆 东南大学 硕士学位论文 移动机器人完全遍历路径规划算法研究 姓名:胡正聪 申请学位级别:硕士 专业:机械电子工程 指导教师:张赤斌 20080403 第一章绪论 第一章绪论 1.1移动机器人的发展史 社会的主体是人类,历史的推动者是人类,伟大的人类运用自己的智慧不断创造伟大的发明,不断推动社会的发展。邓小平同志说过:“科技是第一生产力。”生产力是社会发展的动力,所以人类推动社会发展就是要致力于发展生产力,致力于发展科技。人类不断发展生产力来提高自身认识自然、改造自然、得到自己所需物质的能力,这种能力的进化由最初的运用双手、简单工具、发展到运用畜力、发展到运用简单机器、发展到运用自动化设备、还会发展到我们无法想象的未来。 机器人就是生产力发展的产物。机器人的概念最早是在1920年的科幻小说中提出的,而早期的机器人如1939年美国纽约世界博览会上展出的西屋电气公司制造的家用机器人Elektro和1956年美国人乔治?德沃尔制造出的世界上第一台可编程的机器人都是一些实用价值不高的机器人,它们是现代机器人的雏形。上世纪60年代,由于传感器和计算机技术的发展及应用,兴起了全世界第二代机器人的研究热潮,并向人工智能进发。1968年,美国斯坦福研究所公布了他们研发成功的机器人Shakey。它带有视觉传感器,能根据人的指令发现并抓取积木。Shakey可以算是世界第一台智能机器人,它拉开了第三代机器人研发的序幕。到了上世纪80年代,发达国家都组建各种机器人研究机构,尤其是以美国为代表的国家将机器人的研究列入了军事发展计划,带动各国把机器人的研究推上了高潮,日本和欧洲各国都成立了各自的机器人研究中心和规划了自己的研究计划。进入90年代后,机器人的应用领域除了工业和军事外,还涉及到了服务和娱乐领域,以日本本田公司的ASIMO人型机器人和索尼公司的AIBO娱乐机器人为代表的机器人展示了机器人领域各方面的先进研究成果。在欧洲,2002年丹麦iRobot公司推出了吸尘器机器人Roomba,它能避开障碍,自动设计行进路线,还能在电量不足时,自动驶向充电座。Roomba是目前世界上销量最大、最商业化的家用机器人。2006年6月,微软公司推出MicrosoRRoboticsStudio,机器人模块化、平台统一化的趋势越来截明显,比尔?盖茨预言:“家用机器人很快将席卷伞球。” 图1.1丹麦iRobot公司推出的吸尘机器人Roomba[ 哪些问题适合于用机器学习来解决 我们和大家分享了哪些问题适合于用机器学习来解决。在明确了问题之后我们就需要来解决问题,本文要描述的是产品经理在开发机器学习产品时所需要的能力。第一部分提到产品经理的核心能力并不会因为应用到机器学习技术而改变,而只是在某些方面需要有所加强。产品经理一般需要五种核心能力,包括客户共情/设计分解,沟通、合作、商业策略和技术理解力。在机器学习领域需要增强的可能是技术方面的理解能力,因为产品经理需要理解机器学习系统的操作才能做出较好的产品决策。你可以向工程师学习也可以通过书本和网络教程充电。但如果你对机器学习系统的运行没有很好的理解,那么你的产品很可能会遇到很多问题。 算法的局限性 机器学习使用的每一个算法都基于特定的任务进行优化,无法覆盖真实情况下每一个细微的差别。理解算法的能力和局限将会帮助你把握住用户体验中存在的差距,并且通过优化产品设计或算法来解决。这是作为产品经理必须要掌握的能力。关于算法的不足我们用几个例子来说明。 数据中的偏差 机器学习算法从数据中学习模式,所以数据的质量决定了算法的表现。机器学习产品需要面对的第一个挑战便是这些数据要能够充分代表你的用户。有一个很负面的例子,就是google将黑人兄弟识别成了大猩猩。 所以保证数据代表你所有的用户是产品成功的关键。有时候偏差的存在并不是来自于数据收集的错误,而是数据固有的特性。就像IBM沃森利用俚语的都市字典进行训练后会输出恶毒的语言一样。我们期待的是输出礼貌的语言,但机器学习却学到了语言集中不好的部分。所以在精训练的时候需要对数据进行一定的清晰。 另一个例子,一般发达国家的互联网人数相较于发展中国家多。如果你基于搜索次数对搜索习惯进行建模的话,就会得到发达国家更多的结果,那么建模就不能准确的反映各国人民的上网习惯了,例如非洲的用户。对于数据偏差的审视将帮助你意识到产品不希望出现 Chapter8 k NN:k-Nearest Neighbors Michael Steinbach and Pang-Ning Tan Contents 8.1Introduction (151) 8.2Description of the Algorithm (152) 8.2.1High-Level Description (152) 8.2.2Issues (153) 8.2.3Software Implementations (155) 8.3Examples (155) 8.4Advanced Topics (157) 8.5Exercises (158) Acknowledgments (159) References (159) 8.1Introduction One of the simplest and rather trivial classi?ers is the Rote classi?er,which memorizes the entire training data and performs classi?cation only if the attributes of the test object exactly match the attributes of one of the training objects.An obvious problem with this approach is that many test records will not be classi?ed because they do not exactly match any of the training records.Another issue arises when two or more training records have the same attributes but different class labels. A more sophisticated approach,k-nearest neighbor(k NN)classi?cation[10,11,21],?nds a group of k objects in the training set that are closest to the test object,and bases the assignment of a label on the predominance of a particular class in this neighborhood.This addresses the issue that,in many data sets,it is unlikely that one object will exactly match another,as well as the fact that con?icting information about the class of an object may be provided by the objects closest to it.There are several key elements of this approach:(i)the set of labeled objects to be used for evaluating a test object’s class,1(ii)a distance or similarity metric that can be used to compute This need not be the entire training set. 151 十大优秀工业机器人系统集成商 分析 十大优秀工业机器人系统集成商分析 工业机器人产业是一个集系统集成、先进制造和精密配套融合一体的产业,是一个需要技术、制造、研发沉淀经验的行业。从我国机器产业链发展来看,由于受核心技术限制等多方面因素影响,我国工业机器人产业目前获得突破的主要为系统集成领域。国内一些领先企业从集成应用开始,主要借助对国内市场需求、服务等优势,逐渐脱颖而出,取得了不错的市场成绩。笔者对获得2013年十大优秀工业机器人系统集成商的发展概况及主要产品进行了简单归纳分析,以飨读者。 1、佛山市利迅达机器人系统有限公司(简称:利迅达) 佛山市利迅达机器人系统有限公司是从事机器人系统自动化集成和工业智能化设备研发、生产的高科技企业。公司筹备于2008年,于2010年4月正式成立,经过数年迅猛增长,已发展成为华南地区乃至国内规模最大,实力最强的专业工业机器人应用系统集成商。 利迅达与欧州多家高技术企业的机器人系统研发生产企业战略合作,令利迅达由一开始就在一个国际级的高起点上,再根据中国市场实际,研发出一系列具自有知识产权的全新意念的金属产品表面处理综合系统。其中“机器人打磨拉丝 系统”被评为2011年广东省高新技术产品;“机器人智能化焊接系统”被评为2012年广东省高新技术产品。公司为顺德区百家智能制造工程试点示范企业,在2013年被认定为国家级高新技术企业。 2、厦门思尔特机器人系统有限公司(简称:思尔特) 思尔特创建于2004年6月,位于厦门集美灌南工业区,是厦门市高新技术企业。思尔特多年来为中联、徐工、柳工、厦工、龙工、玉柴等多家国内大中型企业服务,设计制造出技术先进的机器人系统。 2009年,思尔特在上海成立全资子公司上海思尔特机器人科技有限公司,针对冲压机、折弯机、压铸机、弯管机、热锻机等机床的自动上下料生产线的研发、设计、制造。 2010年,思尔特决定打造西南区制造基地,于2010年7月注册成立全资子公司成都思尔特机器人科技有限公司。成都思尔特是西南地区首家专业机器人系统集成商,具有年集成200套机器人系统的能力,主营方向为汽车零部件及薄板焊接的机器人应用。 3、无锡丹佛数控装备机械科技有限公司(简称:丹佛) 无锡丹佛数控装备机械科技有限公司成立于2010年,现阶段主要经营项目分别为:abb工业机器人、韩国现代工业机器人、焊接机器人、搬运机器人、涂装机器人、机床上下料机器人、码垛机器人、焊接机器人、机器人取毛刺等等,同时为客户提供夹具设计制造及交钥匙工程。 丹佛又与几家大型的融资企业签订战略合作合伙,为那些有订单有市场而没有太多 一种移动机器人的路径规划算法 作者:霍迎辉,张连明 (广东工业大学自动化研究所广州510090 文章来源:自动化技术与应用点击数:1419 更新时间:2005-1-24 摘要:本文提出一种移动机器人路径规划最短切线路径算法。依据此算法,机器人能顺利地避开障碍物到达目标位置,其原理简单,计算快捷,容易实现。仿真结果验证了它的有效性和实用性。 关键词:移动机器人;路径规划;机器人避障 1引言 移动机器人路径规划问题是指在有障碍物的工作环境中寻找一条恰当的从给定起点到终点的运动路径,使机器人在运动过程中能安全、无碰撞地绕过所有的障碍物[1]。 障碍环境中机器人的无碰撞路径规划[2]是智能机器人研究的重要课题之一,由于在障碍空间中机器人运动规划的高度复杂性使得这一问题至今未能很好地解决。路径规划问题根据机器人的工作环境模型可以分为两种,一种是基于模型的路径规划,作业环境的全部信息都是预知的;另一种是基于传感器的路径规划,作业环境的信息是全部未知或部分未知的。 对机器人路径规划的研究,世界各国的专家学者们提出了许多不同的路径规划方法,主要可分为全局路径和局部路径规划方法。全局路径规划方法有位形空间法、广义锥方法、顶点图像法、栅格划归法;局部路径规划方法主要有人工势场法。这些方法都各有优缺点[3],也没有一种方法能够适用于任何场合。 本文提出一种最短切线路径的规划方法,其涉及的理论并不高深,计算简单,容易实现,可供侧重于应用的读者参考。下面将详细介绍该算法的基本原理,最后给出仿真实现的结果。 2最短切线路径算法 2.1算法基本原理 (1)首先判断机器人和给定的目标位置之间是否存在障碍物。如图1所示,以B代表目标位置,其坐标 为(x B,y B ),以R、A分别代表机器人及障碍物,坐标为(x R ,y R )、(x A ,y A )。Rr和Ra表示机器人和障 碍物的碰撞半径,也就是说在其半径以外无碰撞的危险。这里对碰撞半径的选择作出一点说明,碰撞半径越小,发生碰撞的危险度越大,但切线路径越短;碰撞半径越大,发生碰撞的危险度越小,但同时切线路径越长。要根据实际情况和控制要求来确定碰撞半径。若机器人与目标位置之间不存在障碍物,机器人可走直线直接到达目标位置,此时的直线方程可由两点式确定: 1.什么是机器视觉 【概述】 机器视觉就是用机器代替人眼来做测量和判断。机器视觉系统是指通过机器视觉产品(即图像摄取装置,分 CMOS 和 CCD 两种)将被摄取目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。 机器视觉系统的特点是提高生产的柔性和自动化程度。在一些不适合于人工作业的危险工作环境或人工视觉难以满足要求的场合,常用机器视觉来替代人工视觉;同时在大批量工业生产过程中,用人工视觉检查产品质量效率低且精度不高,用机器视觉检测方法可以大大提高生产效率和生产的自动化程度。而且机器视觉易于实现信息集成,是实现计算机集成制造的基础技术。 正是由于机器视觉系统可以快速获取大量信息,而且易于自动处理,也易于同设计信息以及加工控制信息集成,因此,在现代自动化生产过程中,人们将机器视觉系统广泛地用于工况监视、成品检验和质量控制等领域。【基本构造】 一个典型的工业机器视觉系统包括:光源、镜头、 CCD 照相机、图像处理单元(或图像捕获卡)、图像处理软件、监视器、通讯 / 输入输出单元等。 系统可再分为: 主端电脑(Host Computer) 影像撷取卡(Frame Grabber)与影像处理器影像摄影机 CCTV镜头显微镜头照明设备: Halogen光源 LED光源 高周波萤光灯源闪光灯源其他特殊光源影像显示器 LCD 机构及控制系统 PLC、PC-Base控制器 精密桌台伺服运动机台 【工作原理】 机器视觉检测系统采用CCD照相机将被检测的目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号,图像处理系统对这些信号进行各种运算来抽取目标的特征,如面积、数量、位置、长度,再根据预设的允许度和其他条件输出结果,包括尺寸、角度、个数、合格 / 不合格、有 / 无等,实现自动识别功能。 【机器视觉系统的典型结构】 一个典型的机器视觉系统包括以下五大块: 1.照明 照明是影响机器视觉系统输入的重要因素,它直接影响输入数据的质量和应用效果。由于没有通用的机器视觉照明设备,所以针对每个特定的应用实例,要选择相应的照明装置,以达到最佳效果。光源可分为可见光和不可见光。常用的几种可见光源是白帜灯、日光灯、水银灯和钠光灯。可见光的缺点是光能不能保持稳定。如何使光能在一定的程度上保持稳定,是实用化过程中急需要解决的问题。另一方面,环境光有可能影响图像的质量,所以可采用加防护屏的方法来减少环境光的影响。照明系统按其照射方法可分为:背向照明、前向照明、结构光和频闪光照明等。其中,背向照明是被测物放在光源和摄像机之间,它的优点是能获得高对比度的图像。前向照明是光源和摄像机位于被测物的同侧,这种方式便于安装。结构光照明是将光栅或线光源等投射到被测物上,根据它们产生的畸变,解调出被测物的三维信息。频闪光照明是将高频率的光脉冲照射到物体上,摄像机拍摄要求与光源同步。 2.镜头FOV(Field Of Vision)=所需分辨率*亚象素*相机尺寸/PRTM(零件测量公差比)镜头选择应注意: ①焦距②目标高度③影像高度④放大倍数⑤影像至目标的距离⑥中心点 / 节点⑦畸变 3.相机 按照不同标准可分为:标准分辨率数字相机和模拟相机等。要根据不同的实际应用场合选不同的相机和高分辨率相机:线扫描CCD和面阵CCD;单色相机和彩色相机。 4.图像采集卡 图像采集卡只是完整的机器视觉系统的一个部件,但是它扮演一个非常重要的角色。图像采集卡直接决定了摄像头的接口:黑白、彩色、模拟、数字等等。 比较典型的是PCI或AGP兼容的捕获卡,可以将图像迅速地传送到计算机存储器进行处理。有些采集卡有内置的多路开关。例如,可以连接8个不同的摄像机,然后告诉采集卡采用那一个相机抓拍到的信息。有些采集卡有内置的数字输入以触发采集卡进行捕捉,当采集卡抓拍图像时数字输出口就触发闸门。 5.视觉处理器 视觉处理器集采集卡与处理器于一体。以往计算机速度较慢时,采用视觉处理器加快视觉处理任务。现在由于采集 由于人工智能的火热,现在很多人都开始关注人工智能的各个分支的学习。人工智能由很多知识组成,其中人工智能的核心——机器学习是大家格外关注的。所以说,要想学好人工智能就必须学好机器学习。其中机器学习中涉及到了很多的算法,在这几篇文章中我们就给大家介绍一下关于机器学习算法的优缺点。 首先我们给大家介绍一下正则化算法,这是回归方法的拓展,这种方法会基于模型复杂性对其进行惩罚,它喜欢相对简单能够更好的泛化的模型。其中,正则化算法的例子有很多,比如说岭回归、最小绝对收缩与选择算子、GLASSO、弹性网络、最小角回归。而正则化算法的优点有两点,第一就是其惩罚会减少过拟合。第二就是总会有解决方法。而正则化算法的缺点也有两点,第一就是惩罚会造成欠拟合。第二就是很难校准。 接着我们给大家说一下集成算法,集成方法是由多个较弱的模型集成模型组,其中的模型可以单独进行训练,并且它们的预测能以某种方式结合起来去做出一个总体预测。该算法主要的问题是要找出哪些较弱的模型可以结合起来,以及结合的方法。这是一个非常强大的技术集,因此广受欢迎。这种算法的案例有很多,比如说Boosting、Bootstrapped Aggregation (Bagging)、AdaBoost、层叠泛化、梯度推进机、梯度提升回归树、随机森林。而集成算法的优点就是当前最先进的预测几乎都使用了算法集成,它比使用单个模型预测出来的结果要 精确的多。而缺点就是需要大量的维护工作。 然后我们给大家介绍一下决策树算法,决策树学习使用一个决策树作为一个预测模型,它将对一个 item(表征在分支上)观察所得映射成关于该 item 的目标值的结论(表征在叶子中)。而树模型中的目标是可变的,可以采一组有限值,被称为分类树;在这些树结构中,叶子表示类标签,分支表示表征这些类标签的连接的特征。决策树算法的案例有很多,比如说分类和回归树、Iterative Dichotomiser 3(ID3)、C4.5 和 C5.0。决策树算法的优点有两种,第一就是容易解释,第二就是非参数型。缺点就是趋向过拟合,而且可能或陷于局部最小值中,最后就是没有在线学习。 在这篇文章中我们给大家介绍了机器学习中涉及到的正则化算法、集成算法以及决策树算法的案例、优点以及缺点,这些知识都是能够帮助大家理解机器学习的算法,希望这篇文章能够帮助到大家。 人工智能之机器学习常见算法 摘要机器学习无疑是当前数据分析领域的一个热点内容。很多人在平时的工作中都或多或少会用到机器学习的算法。这里小编为您总结一下常见的机器学习算法,以供您在工作和学习中参考。 机器学习的算法很多。很多时候困惑人们都是,很多算法是一类算法,而有些算法又是从其他算法中延伸出来的。这里,我们从两个方面来给大家介绍,第一个方面是学习的方式,第二个方面是算法的类似性。 学习方式 根据数据类型的不同,对一个问题的建模有不同的方式。在机器学习或者人工智能领域,人们首先会考虑算法的学习方式。在机器学习领域,有几种主要的学习方式。将算法按照学习方式分类是一个不错的想法,这样可以让人们在建模和算法选择的时候考虑能根据输入数据来选择最合适的算法来获得最好的结果。 监督式学习: 在监督式学习下,输入数据被称为训练数据,每组训练数据有一个明确的标识或结果,如对防垃圾邮件系统中垃圾邮件非垃圾邮件,对手写数字识别中的1,2,3,4等。在建立预测模型的时候,监督式学习建立一个学习过程,将预测结果与训练数据的实际结果进行比较,不断的调整预测模型,直到模型的预测结果达到一个预期的准确率。监督式学习的常见应用场景如分类问题和回归问题。常见算法有逻辑回归(LogisTIc Regression)和反向传递神经网络(Back PropagaTIon Neural Network) 非监督式学习: 在非监督式学习中,数据并不被特别标识,学习模型是为了推断出数据的一些内在结构。常见的应用场景包括关联规则的学习以及聚类等。常见算法包括Apriori算法以及k-Means 算法。 半监督式学习: 在此学习方式下,输入数据部分被标识,部分没有被标识,这种学习模型可以用来进行预 遗传算法与机器人路径规划 摘要:机器人的路径规划是机器人学的一个重要研究领域,是人工智能和机器人学的一个结合点。对于移动机器人而言,在其工作时要求按一定的规则,例如时间最优,在工作空间中寻找到一条最优的路径运动。机器人路径规划可以建模成在一定的约束条件下,机器人在工作过程中能够避开障碍物从初始位置行走到目标位置的路径优化过程。遗传算法是一种应用较多的路径规划方法,利用地图中的信息进行路径规划,实际应用中效率比较高。 关键词:路径规划;移动机器人;避障;遗传算法 Genetic Algorithm and Robot Path Planning Abstract: Robot path planning research is a very important area of robotics, it is also a combine point of artificial intelligence and robotics. For the mobile robot, it need to be worked by certain rulers(e.g time optimal),and find a best movement path in work space. Robot path planning can be modeled that in the course of robots able to avoid the obstacles from the initial position to the target location,and it ruquire to work under ertain constraints. Genetic algorithm used in path planning is very common, when planning the path ,it use the information of map ,and have high eficient in actual. Key words: Path planning,mobile robot, avoid the obstacles, genetic algorithm 1路径规划 1.1机器人路径规划分类 (1)根据机器人对环境信息掌握的程度和障碍物的不同,移动机器人的路径规划基本上可分为以下几类: 1,已知环境下的对静态障碍物的路径规划; 2,未知环境下的对静态障碍物的路径规划; 3,已知环境下对动态障碍物的路径规划; 4,未知环境下的对动态障碍物的路径规划。 (2)也可根据对环境信息掌握的程度不同将移动机器人路径规划分为两种类型: 1,基于环境先验完全信息的全局路径规划; 2,基于传感器信息的局部路径规划。 (第二种中的环境是未知或部分未知的,即障碍物的尺寸、形状和位置等信息必须通过传感器获取。) 1.2路径规划步骤 无论机器人路径规划属于哪种类别,采用何种规划算法,基本上都要遵循以下步骤: 1, 建立环境模型,即将现实世界的问题进行抽象后建立相关的模型; 2, 路径搜索方法,即寻找合乎条件的路径的算法。 1.3路径规划方法 数字图像处理与机器视觉 2015-2016期末试卷参考答案南昌大学研究生2015,2016年第2学期期末考试试卷 试卷编号: (开)卷课程名称: 数字图像处理与机器视觉适用班级: 2015级硕士研究生姓名: 学号: 专业: 学院: 机电工程学院考试日期: 题号一二三四五六七八九十总分累分人 签名题分 10 15 15 10 20 30 100 得分 考生注意事项:1、本试卷共4页,请查看试卷中是否有缺页或破损。如有请报告以便更换。 2、使用A4答题纸,注意装订线。 一、单项选择题(从下列各题四个备选答案中选出一个正确答案,并将其 代号填在题前的括号内。每小题1分,共10分) ( b )1.图像与灰度直方图间的对应关系是: a.一一对应 b.多对一 c.一对多 d.都不对 ( d )2. 下列算法中属于图象平滑处理的是: a.Hough变换法 b.状态法 c.高通滤波 d. 中值滤波 ( c )3.下列算法中属于图象锐化处理的是: a.局部平均法 b.最均匀平滑法 c.高通滤波 d. 中值滤波 ( d )4. 下列图象边缘增强算子中对噪声最敏感的是: a.梯度算子 b.Prewitt算子 c.Roberts算子 d. Laplacian算子 ( b )5. 下列算法中属于点处理的是: a.梯度锐化 b.二值化 c.傅立叶变换 d.中值滤波 ( d )6.下列算子中利用边缘灰度变化的二阶导数特性检测边缘的是: a.梯度算子 b.Prewitt算子 c.Roberts算子 d. Laplacian算子 ( c )7.将灰度图像转换成二值图像的命令为: a.ind2gray b.ind2rgb c.im2bw d.ind2bw ( d )8.数字图像处理的研究内容不包括: a.图像数字化 b.图像增强 c.图像分割 d.数字图像存储 ( d )9.对一幅100?100像元的图象,若每像元用,bit表示其灰度值,经霍夫曼编码后图象的压缩比为2:1,则压缩图象的数据量为: a.2500bit b.20000bit c.5000bit d.40000bit ( b )10.图像灰度方差说明了图像哪一个属性: a.平均灰度 b.图像对比度 c.图像整体亮度 d.图像细节 第 1 页 二、填空题(每空1分,共15分) l. 图像处理中常用的两种邻域是 4-邻域和 8-邻域。 2.图象平滑既可在空间域中进行,也可在频率域中进行。 3.常用的灰度内插法有最近邻元法、双线性内插法和三次内插法。 4. 低通滤波法是使高频成分受到抑制而让低频成分顺利通过,从而实现图像平滑。 5.Prewitt边缘检测算子对应的模板是和。 -1 -1 -1 -1 0 1 0 0 0 -1 0 1 1 1 1 -1 0 1 (不分先后) 6.图像压缩系统是有编码器和解码器两个截然不同的结构块组成的。 7.灰度直方图的纵坐标是该灰度出现的频率。 8.依据图象的保真度,图象编码可分为无失真(无损)编码和有失真(有损)编码两 种。机器学习10大算法-周辉
国内外工业机器人品牌盘点
机器视觉检测的分析简答作业及答案要点学习资料
机器学习中常见的几种优化方法
机器学习十大算法:CART
国内外著名工业机器人厂商
移动机器人完全遍历路径规划算法研究
哪些问题适合于用机器学习来解决
机器学习十大算法8:kNN
十大优秀工业机器人系统集成商分析
一种移动机器人的路径规划算法
机器人视觉算法 参考答案
机器学习中各个算法的优缺点(一)
人工智能之机器学习常见算法
遗传算法与机器人路径规划
数字图像处理与机器视觉 2015-2016期末试卷参考答案