毫米波Rotman透镜天线的计算机仿真设计
计算机仿真课程设计报告
、 北京理工大学珠海学院 课程设计任务书 2010 ~2011 学年第 2学期 学生姓名:林泽佳专业班级:08自动化1班指导教师:钟秋海工作部门:信息学院一、课程设计题目 : 《控制系统建模、分析、设计和仿真》 本课程设计共列出10个同等难度的设计题目,编号为:[0号题]、[1号题]、[2号题]、[3号题]、[4号题]、[5号题]、[6号题]、[7号题]、[8号题]、[9号题]。 学生必须选择与学号尾数相同的题目完成课程设计。例如,学号为8xxxxxxxxx2的学生必须选做[2号题]。 二、课程设计内容 (一)《控制系统建模、分析、设计和仿真》课题设计内容|
! " [2 有波纹控制器Dy(z)和一单位速度信号输入时的最少拍无波纹控制器Dw(z)。具体要求见(二)。 (二)《控制系统建模、分析、设计和仿真》课题设计要求及评分标准【共100分】 , 1、求被控对象传递函数G(s)的MATLAB描述。(2分) 2、求被控对象脉冲传递函数G(z)。(4分) 3、转换G(z)为零极点增益模型并按z-1形式排列。(2分) 4、确定误差脉冲传递函数Ge(z)形式,满足单位加速度信号输入时闭环稳态误差为零和实际 闭环系统稳定的要求。(6分) 5、确定闭环脉冲传递函数Gc(z)形式,满足控制器Dy(z)可实现、最少拍和实际闭环系统稳 定的要求。(8分)
6、根据4、5、列写方程组,求解Gc(z)和Ge(z)中的待定系数并最终求解Gc(z)和Ge(z) 。 (12分) 7、求针对单位加速度信号输入的最少拍有波纹控制器Dy(z)并说明Dy(z)的可实现性。 (3分) ! 8、用程序仿真方法分析加速度信号输入时闭环系统动态性能和稳态性能。(7分) 9、用图形仿真方法(Simulink)分析单位加速度信号输入时闭环系统动态性能和稳态性能。 (8分) 10、确定误差脉冲传递函数Ge(z)形式,满足单位速度信号输入时闭环稳态误差为零和实际 闭环系统稳定的要求。(6分) 11、确定闭环脉冲传递函数Gc(z)形式,满足控制器Dw(z)可实现、无波纹、最少拍和实际 闭环系统稳定的要求。(8分) 12、根据10、11、列写方程组,求解Gc(z)和Ge(z)中的待定系数并最终求解Gc(z)和Ge(z) 。 (12分) 13、求针对单位速度信号输入的最少拍无波纹控制器Dw(z)并说明Dw(z)的可实现性。(3分) 14、用程序仿真方法分析单位速度信号输入时闭环系统动态性能和稳态性能。(7分) 15、用图形仿真方法(Simulink)分析单位速度信号输入时闭环系统动态性能和稳态性能。 & (8分) 16、根据8、9、14、15、的分析,说明有波纹和无波纹的差别和物理意义。(4分) 三、进度安排 6月13至6月14:下达课程设计任务书;复习控制理论和计算机仿真知识,收集资料、熟悉仿真工具;确定设计方案和步骤。 6月14至6月16:编程练习,程序设计;仿真调试,图形仿真参数整定;总结整理设计、 仿真结果,撰写课程设计说明书。 6月16至6月17:完成程序仿真调试和图形仿真调试;完成课程设计说明书;课程设计答 辩总结。 [ 四、基本要求
实验七 微带贴片天线的设计与仿真
实验七微带贴片天线的设计与仿真 一、实验目的 1.设计一个微带贴片天线 2..查看并分析该微带贴片天线的 二、实验设备 装有HFSS 13.0软件的笔记本电脑一台 三、实验原理 传输线模分析法求微带贴片天线的辐射原理如下图所示: 设辐射元的长为L,宽为ω,介质基片的厚度为h。现将辐射元、介质基片和接地板视为一段长为L的微带传输线,在传输线的两端断开形成开路,根据微带传输线的理论,由于基片厚度h<<λ,场沿h方向均匀分布。在最简单的情况下,场沿宽度ω方向也没有变化,而仅在长度方向(L≈λ/2)有变化。 在开路两端的电场均可以分解为相对于接地板的垂直分量和水平分量,两垂直分量方向相反,水平分量方向相同,因而在垂直于接地板的方向,两水平分量电场所产生的远区场同向叠加,而两垂直分量所产生的场反相相消。因此,两开路端的水平分量可以等效为无限大平面上同相激励的两个缝隙,缝的电场方向与长边垂直,并沿长边ω均匀分布。缝的宽度△L≈h,长度为ω,两缝间距为L≈λ/2。这就是说,微带天线的辐射可以等效为有两个缝隙所组成的二元阵列。 四、实验内容 利用HFSS软件设计一个右手圆极化天线,此天线通过微带结构实现。中心频率为2.45GHz,选用介质基片R04003,其介电常数为εr=2.38,厚度为h =5mm。最后得到反射系数和三维方向图的仿真结果。 五、实验步骤 1.建立新工程 了方便建立模型,在Tool>Options>HFSS Options中讲Duplicate Boundaries with geometry 复选框选中。 2.将求解类型设置为激励求解类型: (1)在菜单栏中点击HFSS>Solution Type。
计算机仿真技术与CAD习题答案
第0章绪论 0-1 什么是仿真?它所遵循的基本原则是什么? 答: 仿真是建立在控制理论、相似理论、信息处理技术和计算机技术等理论基础之上的,以计算机和其他专用物理效应设备为工具,利用系统模型对真实或假想的系统进行试验,并借助专家经验知识、统计数据和信息资料对试验结果进行分析和研究,进而做出决策的一门综合性的试验性科学。 它所遵循的基本原则是相似原理。 0-2 仿真的分类有几种?为什么? 答: 依据相似原理来分:物理仿真、数学仿真和混合仿真。 物理仿真:就是应用几何相似原理,制作一个与实际系统相似但几何尺寸较小或较大的物理模型(例如飞机模型放在气流场相似的风洞中)进行实验研究。 数学仿真:就是应用数学相似原理,构成数学模型在计算机上进行研究。它由软硬件仿真环境、动画、图形显示、输出打印设备等组成。 混合仿真又称数学物理仿真,它是为了提高仿真的可信度或者针对一些难以建模的实体,在系统研究中往往把数学仿真、物理仿真和实体结合起来组成一个复杂的仿真系统,这种在仿真环节中有部分实物介入的混合仿真也称为半实物仿真或者半物理仿真。 0-3 比较物理仿真和数学仿真的优缺点。 答: 在仿真研究中,数学仿真只要有一台数学仿真设备(如计算机等),就可以对不同的控制系统进行仿真实验和研究,而且,进行一次仿真实验研究的准备工作也比较简单,主要是受控系统的建模、控制方式的确立和计算机编程。数学仿真实验所需的时间比物理仿真大大缩短,实验数据的处理也比物理仿真简单的多。 与数学仿真相比,物理仿真总是有实物介入,效果直观逼真,精度高,可信度高,具有实时性与在线性的特点;但其需要进行大量的设备制造、安装、接线及调试工作,结构复杂,造价较高,耗时过长,灵活性差,改变参数困难,模型难以重用,通用性不强。 0-4 简述计算机仿真的过程。 答: 第一步:根据仿真目的确定仿真方案 根据仿真目的确定相应的仿真结构和方法,规定仿真的边界条件与约束条件。 第二步:建立系统的数学模型 对于简单的系统,可以通过某些基本定律来建立数学模型。而对于复杂的系统,则必须利用实验方法通过系统辩识技术来建立数学模型。数学模型是系统仿真的依据,所以,数学模型的准确性是十分重要。
8mm点聚焦透镜天线设计
8mm点聚焦透镜天线设计 摘要:根据对物体毫米波信号采集的需要,设计一种工作于8 mm频段的点聚焦透镜天线,选用宽波束微带天线做馈源,设计焦距大小不同的双面透镜,采用电磁仿真软件CST 对聚焦透镜天线进行仿真实验,从仿真结果可以看出,不同焦距双面透镜实现了预期聚焦效果且空间分辨率大小能够 满足对物体逐点扫描的需求。 关键词:点聚焦透镜;微带天线;焦距;空间分辨率 中图分类号:TN820.1?34 文献标识码:A 文章编号:1004?373X(2016)11?0079?03 Abstract:A point?focusing lens antenna working at 8 mm frequency band was designed according to the demand for millimeter?wave signal acquisition. The double?sided lens with different focal lengths was designed by selecting the wide beam microstrip antenna as the feed source. The electromagnetic simulation software CST is used to simulate the focusing lens antenna. The simulation results show that the double?sided lens with different focal lengths can realize the expected focusing effect and high spatial resolution,which can meet the demand for point?by?point scanning of the object.
计算机仿真技术的发展概述及认识
计算机仿真技术的发展概述及认识 摘要:随着经济的发展和社会的进步,计算机技术高速发展,使人类社会进入了信息时代,计算机作为后期新秀渗入到人们生活中的每一个领域,给人们的生活带来了前所未有的变化。作为新兴的技术,计算机技术在人类研究的各个领域起到了只管至关重要的作用,帮助人类解决了许多技术难题。在科研领域,计算机技术与仿真技术相结合,形成了计算机仿真技术,作为人们科学研究的一种新型方法,被人们应用到各个领域,用来解决人们用纯数学方法或者现实实验无法解决的问题,对科研领域技术成果的形成有着积极地促进作用。 本文在计算机仿真技术的理论思想基础上,分析了计算机仿真技术产生的基本原因,也就是人们用计算机模拟解决问题的优点所在,讨论了模拟、仿真、实验、计算机仿真之间的联系和区别,介绍了计算机仿真技术的发展历程,并查阅相关资料介绍了计算机仿真技术在不同领域的应用,分析并预测了计算机仿真的未来发展趋势。经过查阅大量数据资料并加以分析对比,这对于初步认识计算机仿真技术具有重要意义。 关键词:计算机仿真;模拟;仿真技术;发展 一、引言 计算机仿真技术是以多种学科和理论为基础,以计算机及其相应的软件为工具,通过虚拟试验的方法来分析和解决问题的一门综合性技术。计算机仿真(模拟)早期称为蒙特卡罗方法,是一门利用随机数实验求解随机问题的方法。其原理可追溯到1773年法国自然学家G.L.L.Buffon为估计圆周率值所进行的物理实验。根据仿真过程中所采用计算机类型的不同,计算机仿真大致经历了模拟机仿真、模拟-数字混合机仿真和数字机仿真三个大的阶段。20世纪50年代计算机仿真主要采用模拟机;60年代后串行处理数字机逐渐应用到仿真之中,但难以满足航天、化工等大规模复杂系统对仿真时限的要求;到了70年代模拟-数字混合机曾一度应用于飞行仿真、卫星仿真和核反应堆仿真等众多高技术研究领域;80年代后由于并行处理技术的发展,数字机才最终成为计算机仿真的主流。现在,计算机仿真技术已经在机械制造、航空航天、交通运输、船舶工程、经济管理、工程建设、军事模拟以及医疗卫生等领域得到了广泛的应用。 二、基本概念 模拟:(Simulation)应用模型和计算机开展地理过程数值和非数值分析。不是去求系统方程的解析解,而是从系统某初始状态出发,去计算短暂时间之后接着发生的状态,再以此为初始状态不断的重复,就能展示系统的行为模式。模拟是对真实事物或者过程的虚拟。模拟要表现出选定的物理系统或抽象系统的关键特性。模拟的关键问题包括有效信息的获取、关键特性和表现的选定、近似简化和假设的应用,以及模拟的重现度和有效性。可以认为仿真是一种重现系统外在表现的特殊的模拟。 仿真:(Emulation)利用模型复现实际系统中发生的本质过程,并通过对系统模型的实验来研究存在的或设计中的系统,又称模拟。即使用项目模型将特定于某一具体层次的不确定性转化为它们对目标的影响,该影响是在项目仿真项目
Simulink系统仿真课程设计
《信息系统仿真课程设计》 课程设计报告 题目信息系统课程设计仿真 院(系): 信息科学与技术工程学院 专业班级:通信工程1003 学生姓名: 学号: 指导教师:吴莉朱忠敏 2012年1 月14 日至2012年1 月25 日 华朴中科技大学武昌分校制 信息系统仿真课程设计任务书
20 年月日 目录 摘要 (5)
一、Simulink 仿真设计 (6) 1.1 低通抽样定理 (6) 1.2 抽样量化编码 (9) 二、MATLA仿真设计 (12) 2.1 、自编程序实现动态卷积 (12) 2.1.1 编程分析 (12) 2.1.2 自编matlab 程序: (13) 2.1.3 仿真图形 (13) 2.1.4 仿真结果分析 (15) 2.2 用双线性变换法设计IIR 数字滤波器 (15) 2.2.1 双线性变换法的基本知识 (15) 2.2.2 采用双线性变换法设计一个巴特沃斯数字低通滤波器 (16) 2.2.3 自编matlab 程序 (16) 2.2.4 仿真波形 (17) 2.2.5 仿真结果分析 (17) 三、总结 (19) 四、参考文献 (19) 五、课程设计成绩 (20) 摘要 Matlab 是一种广泛应用于工程设计及数值分析领域的高级仿真平台。它功能
强大、简单易学、编程效率高,目前已发展成为由MATLAB 语言、MATLAB 工作环境、MATLAB 图形处理系统、MATLAB 数学函数库和MATLAB 应用程序接口五大部分组成的集数值计算、图形处理、程序开发为一体的功能强大的系统。本次课程设计主要包括MATLAB 和SIMULINKL 两个部分。首先利用SIMULINKL 实现了连续信号的采样及重构,通过改变抽样频率来实现过采样、等采样、欠采样三种情况来验证低通抽样定理,绘出原始信号、采样信号、重构信号的时域波形图。然后利用SIMULINKL 实现抽样量化编码,首先用一连续信号通过一个抽样量化编码器按照A 律13折线进量化行,观察其产生的量化误差,其次利用折线近似的PCM 编码器对一连续信号进行编码。最后利用MATLAB 进行仿真设计,通过编程,在编程环境中对程序进行调试,实现动态卷积以及双线性变换法设计IIR 数字滤波器。 本次课程设计加深理解和巩固通信原理、数字信号处理课上所学的有关基本概念、基本理论和基本方法,并锻炼分析问题和解决问题的能力。
基于HFSS矩形微带贴片天线的仿真设计报告
.. .. .. 矩形微带贴片天线的仿真设计 实验目的:运用HFSS的仿真能力对矩形微带天线进行仿真 实验容:矩形微带天线仿真:工作频率7.55GHz 天线结构尺寸如表所示: 名称起点尺寸类型材料 Sub -14.05,-16,0 28.1,32,0.794 Box Rogers 5880 (tm)GND -14.05,-16,-0.05 28.1,32,0.05 Box pec Patch -6.225,-8,0.794 12.45 , 16, 0.05 Box pec MSLine -3.1125,-8,0.794 2.49 , -8 , 0.05 Box pec Port -3.1125,-16,-0.05 2.49 ,0, 0.894 Rectangle Air -40,-40,-20 80,80,40 Box Vacumn 一、新建文件、重命名、保存、环境设置。 (1)、菜单栏File>>save as,输入0841,点击保存。 (2). 设置激励终端求解方式:菜单栏HFSS>Solution type>Driven Termin ,点击OK。
(3)、设置模型单位:3D Modeler>Units选择mm ,点击OK。 (4)、菜单栏Tools>>Options>>Modeler Options,勾选”Edit properties of new pri”, 点击OK。 二、建立微带天线模型 (1)、插入模型设计 (2)、重命名
输入0841 (3)点击创建GND,起始点:x:-14.05,y:-16,z:-0.05,dx:28.1,dy:32,dz:0.05 修改名称为GND, 修改材料属性为 pec, (4)介质基片:点击,:x:-14.05,y:-16,z:0。dx: 28.1,dy: 32,dz: 0.794, 修 改名称为Sub,修改材料属性为Rogers RT/Duriod 5880,修改颜色为绿色,透明度0.4。
matlab课程设计报告书
《计算机仿真及应用》课程设计报告书 学号:08057102,08057127 班级:自动化081 姓名陈婷,万嘉
目录 一、设计思想 二、设计步骤 三、调试过程 四、结果分析 五、心得体会 六、参考文献
选题一、 考虑如下图所示的电机拖动控制系统模型,该系统有双输入,给定输入)(t R 和负载输入)(t M 。 1、 编制MATLAB 程序推导出该系统的传递函数矩阵。 2、 若常系数增益为:C 1=Ka =Km =1,Kr =3,C2=0.8,Kb =1.5,时间常数T 1=5, T 2=0.5,绘制该系统的根轨迹、求出闭环零极点,分析系统的稳定性。若)(t R 和)(t M 分别为单位阶跃输入,绘制出该系统的阶跃响应图。(要求C 1,Ka ,Km ,Kr ,C2,Kb , T 1,T 2所有参数都是可调的) 一.设计思想 题目分析: 系统为双输入单输出系统,采用分开计算,再叠加。 要求参数均为可调,而matlb 中不能计算未赋值的函数,那么我们可以把参数设置为可输入变量,运行期间根据要求赋值。 设计思路: 使用append 命令连接系统框图。 选择‘参数=input('inputanumber:')’实现参数可调。 采用的方案: 将结构框图每条支路稍作简化,建立各条支路连接关系构造函数,运行得出相应的传递函数。 在得出传递函数的基础上,使用相应的指令求出系统闭环零极点、画出其根轨迹。 通过判断极点是否在左半平面来编程判断其系统是否稳定。 二.设计步骤 (1)将各模块的通路排序编号
(2)使用append命令实现各模块未连接的系统矩阵 (3)指定连接关系 (4)使用connect命令构造整个系统的模型 三.调试过程 出现问题分析及解决办法: 在调试过程出现很多平时不注意且不易寻找的问题,例如输入的逗号和分号在系统运行时不支持中文格式,这时需要将其全部换成英文格式,此类的程序错误需要细心。 在实现参数可调时初始是将其设为常量,再将其赋值进行系统运行,这样参数可调性差,后用‘参数=input('inputanumber:')’实现。 最后是在建立通路连接关系时需要细心。 四.结果分析 源代码: Syms C1 C2 Ka Kr Km Kb T1 T2 C1=input('inputanumber:') C2=input('inputanumber:') Ka=input('inputanumber:') Kr=input('inputanumber:') Km=input('inputanumber:') Kb=input('inputanumber:') T1=input('inputanumber:') T2=input('inputanumber:') G1=tf(C1,[0 1]); G2=tf(Ka*Kr,[0 1]); G3=tf(Km,[T1 1]); G4=tf(1,[T2 1]); G5=tf(1,[1 0]); G6=tf(-C2,1); G7=tf(-Kb,1); G8=tf(-1,1); Sys=append(G1,G2,G3,G4,G5,G6,G7,G8) Q=[1 0 0;2 1 6;3 2 7;4 3 8;5 4 0;6 5 0;7 4 0;8 0 0;]; INPUTS1=1; OUTPUTS=5; Ga=connect(Sys,Q,INPUTS1,OUTPUTS) INPUTS2=8; OUTPUTS=5; Gb=connect(Sys,Q,INPUTS2,OUTPUTS) rlocus(Ga)
实验一:微带天线的设计与仿真
实验一:微带天线的设计与仿真 一、实验步骤、仿真结果分析及优化 1、原理分析: 本微带天线采用矩形微带贴片来进行设计。 假设要设计一个在2.5GHz 附近工作的微带天线。我采用的介质基片, εr= 9.8, h=1.27mm 。理由是它的介电系数和厚度适中,在2.5GHz 附近能达到较高的天线效率。并且带宽相对较高。 由公式:2 /1212-?? ? ??+= r r f c W ε=25.82mm 贴片宽度经计算为25.82mm 。 2 /1121212 1-?? ? ?? +-+ += w h r r e εεε=8.889; ()()()()8.0/258.0264.0/3.0412.0+-++=?h w h w h l e e εε ?l=0.543mm ; 可以得到矩形贴片长度为: l f c L e r ?-= 22ε=18.08mm 馈电点距上边角的距离z 计算如下: ) 2( cos 2 ) (cos 2)(5010 22z R z G z Y e r in ?===λεπβ 2 20 90W R r λ= (0λ< 计算结果:在这类介质板上,2.5GHz 时候50Ω传输线的宽度为1.212mm 。 2、计算 基于ADS 系统的一个比较大的弱点:计算仿真速度慢。特别是在layout 下的速度令人 无法承受,所以先在sonnet 下来进行初步快速仿真。判断计算值是否能符合事实。 sonnet 中的仿真电路图如下: S11图象如下: 可见,按照公式计算出来的数据大致符合事实上模拟出来的结果。但是发现中心频率发生了偏移,这主要是由于公式中很多的近似引起的。主要的近似是下面公式引起 2 20 90W R r λ= (0λ< 附件1: 北京理工大学珠海学院 《计算机仿真》课程设计说明书题目: 控制系统建模、分析、设计和仿真 学院:信息学院 专业班级: 学号: 学生姓名: 指导教师: 2012年6 月16 日 附件2: 北京理工大学珠海学院 课程设计任务书 2011 ~2012 学年第2学期 学生姓名:专业班级: 指导教师:工作部门:信息学院 一、课程设计题目 《控制系统建模、分析、设计和仿真》 本课程设计共列出10个同等难度的设计题目,编号为:[0号题]、[1号题]、[2号题]、[3号题]、[4号题]、[5号题]、[6号题]、[7号题]、[8号题]、[9号题]。 学生必须选择与学号尾数相同的题目完成课程设计。例如,学号为8xxxxxxxxx2的学生必须选做[2号题]。 [0号题] 控制系统建模、分析、设计和仿真 设连续被控对象的实测传递函数为: 用零阶保持器离散化,采样周期取秒,分别设计一单位加速度信号输入时的最少拍有波纹控制器Dy(z)和一单位速度信号输入时的最少拍无波纹控制器Dw(z)。具体要求见(二)。 [1号题] 控制系统建模、分析、设计和仿真 设连续被控对象的实测传递函数为: 用一阶保持器离散化,采样周期取秒,分别设计一单位加速度信号输入时的最少拍有波纹控制器Dy(z)和一单位速度信号输入时的最少拍无波纹控制器Dw(z)。具体要求见(二)。 [2号题] 控制系统建模、分析、设计和仿真 设连续被控对象的实测传递函数为: 用零阶保持器离散化,采样周期取秒,分别设计一单位加速度信号输入时的最少拍有波纹控制器Dy(z)和一单位速度信号输入时的最少拍无波纹控制器Dw(z)。具体要求见(二)。 [3号题] 控制系统建模、分析、设计和仿真 设连续被控对象的实测传递函数为: 用一阶保持器离散化,采样周期取秒,分别设计一单位加速度信号输入时的最少拍有波纹控制器Dy(z)和一单位速度信号输入时的最少拍无波纹控制器Dw(z)。具体要求见(二)。 [4号题] 控制系统建模、分析、设计和仿真 设连续被控对象的实测传递函数为: 用零阶保持器离散化,采样周期取秒,分别设计一单位加速度信号输入时的最少拍有波纹控制器Dy(z)和一单位速度信号输入时的最少拍无波纹控制器Dw(z)。具体要求见(二)。 [5号题] 控制系统建模、分析、设计和仿真 设连续被控对象的实测传递函数为: 用一阶保持器离散化,采样周期取秒,分别设计一单位加速度信号输入时的最少拍有波纹 控制器Dy(z)和一单位速度信号输入时的最少拍无波纹控制器Dw(z)。具体要求见(二)。 [6号题] 控制系统建模、分析、设计和仿真 设连续被控对象的实测传递函数为: 用零阶保持器离散化,采样周期取秒,分别设计一单位加速度信号输入时的最少拍有波纹 控制器Dy(z)和一单位速度信号输入时的最少拍无波纹控制器Dw(z)。具体要求见(二)。 [7号题] 控制系统建模、分析、设计和仿真 (19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号 (43)申请公布日 (21)申请号 201910267033.5 (22)申请日 2019.04.03 (71)申请人 浙江大学 地址 310058 浙江省杭州市西湖区余杭塘 路866号 (72)发明人 吴锡东 蒋倩 戴少鹏 周金芳 (74)专利代理机构 杭州求是专利事务所有限公 司 33200 代理人 刘静 邱启旺 (51)Int.Cl. H01Q 1/12(2006.01) H01Q 1/52(2006.01) H01Q 13/02(2006.01) H01Q 15/00(2006.01) H01Q 15/24(2006.01) H01Q 19/06(2006.01) (54)发明名称圆极化变容管有源超表面带孔介质透镜天线(57)摘要本发明公开了一种圆极化变容管有源超表面带孔介质透镜天线,包括聚焦透镜、圆极化阵列、垫片、支撑柱、喇叭天线和底座;圆极化阵列为超表面;聚焦透镜为带孔介质透镜;圆极化阵列、聚焦透镜、支撑柱均通过垫片依次连接,喇叭天线固定在底座上;圆极化阵列为多层变容管有源超表面,层间通过垫片分隔;单层变容管超表面由周期排列的金属图案组成,金属图案为外矩形环嵌套内矩形贴片,外环与内贴片之间通过变容二极管相连;通过改变变容管电容大小调整透射波极化方式。可以在小型化的同时实现高增 益。权利要求书1页 说明书4页 附图6页CN 109994813 A 2019.07.09 C N 109994813 A 权 利 要 求 书1/1页CN 109994813 A 1.一种圆极化变容管有源超表面带孔介质透镜天线,其特征在于,包括聚焦透镜、圆极化阵列、垫片、支撑柱、喇叭天线和底座;所述聚焦透镜为带孔介质透镜;所述圆极化阵列、聚焦透镜、支撑柱均通过垫片依次连接,所述支撑柱固定在底座上,所述喇叭天线固定在底座上,所述喇叭天线的喇叭口朝向聚焦透镜;所述圆极化阵列为多层变容管有源超表面,层间通过垫片分隔;单层超表面由周期排列的金属图案组成,金属图案为外矩形环嵌套内矩形贴片,外矩形环与内矩形贴片之间通过变容管相连;通过改变变容管电容大小调整透射波极化方式。 2.如权利要求1所述的一种圆极化变容管有源超表面带孔介质透镜天线,其特征在于,该天线为全封闭结构。 3.如权利要求1所述的一种圆极化变容管有源超表面带孔介质透镜天线,其特征在于,所述支撑柱为圆筒状,所述垫片为圆环状,所述支撑柱与垫片的材料均为ABS塑料,所述支撑柱内壁贴有吸波材料。 4.如权利要求1所述的一种圆极化变容管有源超表面带孔介质透镜天线,其特征在于,所述聚焦透镜为等厚度的均匀介质,介质内分布直径不一的z方向通孔,将介质视为行距和列距相等的xy平面网格结构,任意通孔的对称轴位于网格结构的交点处。 5.如权利要求4所述的一种圆极化变容管有源超表面带孔介质透镜天线,其特征在于,调整聚焦透镜通孔的孔径,通孔周围透射波的相移随之改变,使得每个通孔能够补偿该位置的待补偿相移。 6.如权利要求1所述的一种圆极化变容管有源超表面带孔介质透镜天线,其特征在于,所述圆极化阵列采用多层变容管有源超表面,每层包含介质基板,介质基板的下表面刻蚀周期性排布的金属图案单元,每个金属图案单元为外正方形环嵌套内矩形贴片,外正方形环与内矩形贴片之间通过两个方向相反的变容二极管相连,或通过四个变容二极管相连。 7.如权利要求1所述的一种圆极化变容管有源超表面带孔介质透镜天线,其特征在于,所述圆极化阵列采用多层变容管有源超表面,每层包含介质基板,介质基板的下表面刻蚀周期性排布的金属图案单元,每个金属图案单元为外圆形环嵌套内圆形贴片,外圆形环与内圆形贴片之间通过两个方向相反的变容二极管相连。 8.如权利要求6或7所述的一种圆极化变容管有源超表面带孔介质透镜天线,其特征在于,所述圆极化阵列相邻的两层间为分隔层,填充空气、泡沫或介质基板。 9.如权利要求6或7所述的一种圆极化变容管有源超表面带孔介质透镜天线,其特征在于,所述有源超表面相邻单元间通过电阻相连;偏置线加载在其中一个单元之上;通过改变偏置电压改变透射波极化方式,包括左手圆极化、右手圆极化、以及线极化。 2 低副瓣毫米波介质透镜天线 伍捍东 (西安恒达微波技术开发公司) 1.概述 在毫米波段,欲获得<-25dB甚至-35dB的低副瓣天线是非常困难的,这是由于波长长度与天线制造误差,表面光洁度等相对接近,天线幅相分布的控制与测量也相对困难得多,边缘绕射,支撑构件的散射也使得天线的副瓣难以降低。小增益的mm波低副瓣天线可以用波纹喇叭天线来获得。大、中增益的mm波低副瓣天线可以通过控制阵面副一相分布的缝隙波导阵列天线来实现。显然,mm波阵列天线是十分昂贵的。而基于抛物反射面的天线则通过控制馈源的初级辐射方向图和边缘照射电子来实现低副瓣。然而,由于面天线中,馈源及副反射面支撑构件的影响,副瓣一般只在-17~22dB之间。 本文介绍采用介质透镜和圆锥喇叭或圆锥波纹喇叭构成的低副瓣mm波天线,在中等增益天线上获得了优于-25dB甚至-35dB的极低副瓣电平,且天线的工作带宽可达全波导带宽。 2.设计原理 透镜天线的种类很多,由于波长较短,为减少制造难度,金属透镜方案没有被采用。综合电性能、制造难度、体积重量和制造经费,对比分析后采用了平凸型介质透镜。这是由于: ①介质透镜是与频率无关的宽带结构; ②平凸型透镜的制造难度相对小; ③透镜所占空间相对小; ④材料坯料相对小。 透镜天线设计思想与抛物反射面天线很相近。在抛物反射面天线中,反射面将来自馈源的球面波收集反射后形成一个平面波。而透镜天线则是使通过透镜的球面波变为一平面波。 平凸透镜的平面与平面波平行,凸面的形状则根据球面波源的位置设计,以使发自该球面波源的波通过该透镜后的等相位面与透镜的平面平行。 图1 为平凸透镜的介质透镜天线原理图。在凸面,应用施耐尔(Snell)定律可以确定对应每个馈电角的斜率。同样,也可以应用费米(Fermat)原理去补偿从馈源通过透镜到达口经面的光学路经长度。 太原理工大学现代科技学院 微波技术与天线课程设计 设计题目:微带天线仿真设计(5) 专业班级 学号 姓名 指导老师 专业班级 学号 姓名 成绩 设计题目:微带天线仿真设计(5) 一、设计目的: 通过仿真了解微带天线设计 二、设计原理: 1、微带天线的结构 微带天线是由一块厚度远小于波长的介质板(成为介质基片)和(用印刷电路或微波集成技术)覆盖在他的两面上的金属片构成的,其中完全覆盖介质板一片称为接触板,而尺寸可以和波长想比拟的另一片称为辐射元。 微带天线的馈电方式分为两种,如图所示。一种是侧面馈电,也就是馈电网络与辐射元刻制在同一表面;另一种是底馈,就是以同轴线的外导体直接与接地板相连,内导体穿过接地板和介质基片与辐射元相接。 微带天线的馈电 (a )侧馈 (b )底馈 2、微带天线的辐射原理 用传输线模分析法介绍矩形微带天线的辐射原理。矩形贴片天线如图: … …………… …… …… …… … …装 …… …… …… …… … …… …… …… 订… …… … …… …… …… …… …… … …线 …… …… …… …… … …… …… …… 设辐射元的长为L,宽为ω,介质基片的厚度为h。现将辐射元、介质基片和接地板视为一段长为L的微带传输线,在传输线的两端断开形成开路,根据微带传输线的理论,由于基片厚度h<<λ,场沿h方向均匀分布。在最简单的情况下,场沿宽度ω方向也没有变化,而仅在长度方向(L≈λ/2)有变化。在开路两端的电场均可以分解为相对于接地板的垂直分量和水平分量,两垂直分量方向相反,水平分量方向相同,因而在垂直于接地板的方向,两水平分量电场所产生的远区场同向叠加,而两垂直分量所产生的场反相相消。因此,两开路端的水平分量可以等效为无限大平面上同相激励的两个缝隙,缝的电场方向与长边垂直,并沿长边ω均匀分布。缝的宽度△L≈h,长度为ω,两缝间距为L≈λ/2。这就是说,微带天线的辐射可以等效为有两个缝隙所组成的二元阵列。 经过查阅资料,可以知道微带天线的波瓣较宽,方向系数较低,这正是微带天线的缺点,除此之外,微带天线的缺点还有频带窄、损耗大、交叉极化大、单个微带天线的功率容量小等.在这个课设中,借助EDA仿真软件Ansoft HFSS进行设计和仿真。Ansoft公司推出的基于电磁场有限元方法(FEM)的分析微波工程问题的三维电磁仿真软件,Ansoft HFSS 以其无与伦比的仿真精度和可靠性,快捷的仿真速度,方便易用的操作界面,稳定成熟的自适应网格剖分技术,使其成为高频结构设计的首选工具和行业标准,并已广泛应用于航 《计算机仿真技术》 课程设计 姓名: 学号: 班级: 1 专业: 学院: 2016年12月24日 目录 一、设计目的 (1) 二、设计任务 (1) 三、具体要求 (1) 四、设计原理概述 (1) 五、设计内容 (2) 六、设计方案及分析 (2) 1、观察原系统性能指标 (2) 2、手动计算设计 (6) 3、校正方案确定 (8) 七、课程设计总结 (14) 模拟随动控制系统的串联校正设计 一、设计目的 1、通过课程设计熟悉频域法分析系统的方法原理。 2、通过课程设计掌握滞后-超前校正作用与原理。 3、通过在实际电路中校正设计的运用,理解系统校正在实际中的意义。 二、设计任务 控制系统为单位负反馈系统,开环传递函数为) 1025.0)(11.0()(G ++=s s s K s ,设计校正装置,使系统满足下列性能指标:开环增益100K ≥;超调量30%p σ<; 调节时间ts<0.5s 。 三、具体要求 1、使用MATLAB 进行系统仿真分析与设计,并给出系统校正前后的 MATLAB 仿真结果,同时使用Simulink 仿真验证; 2、使用EDA 工具EWB 搭建系统的模拟实现电路,分别演示并验证校正前 和校正后的效果。 四、设计原理概述 校正方式的选择:按照校正装置在系统中的链接方式,控制系统校正方式分 为串联校正、反馈校正、前馈校正和复合校正4种。串联校正是最常用的一种校 正方式,这种方式经济,且设计简单,易于实现,在实际应用中多采用这种校正 方式。串联校正方式是校正器与受控对象进行串联链接的。本设计按照要求将采 用串联校正方式进行校正。 校正方法的选择:根据控制系统的性能指标表达方式可以进行校正方法的确 定。本设计要求以频域指标的形式给出,因此采用基于Bode 图的频域法进行校 正。 几种串联校正简述:串联校正可分为串联超前校正、串联滞后校正和滞后- 超前校正等。 超前校正的目的是改善系统的动态性能,实现在系统静态性能不受损的前提 Design of High-Diversity Gain MIMO Antenna Arrays through Surface Current Optimization Sebastien Clauzier, Said M. Mikki and Yahia M. M. Antar Electrical and Computer Engineering Royal Military College of Canada Station Forces, Kingston, ON K7K 7B4, Canada E-mail: sebastien.clauzier@rmc.ca; said.mikki@rmc.ca; yahia-y@rmc.ca Abstract—In this paper, we present a general method for obtaining MIMO antenna current distribution with optimum cross-correlation diversity gain. The method is illustrated with an example of 3-element arrays of wire antenna operating at 60GHz. I.I NTRODUCTION The recent demands for the development of the 5G wireless system requires, among other things, new design methods to improve MIMO systems performances [1]. For MIMO systems, the characterization of these performances goes through several parameters [2], [3], [4], for example the channel capacity, the TARC (Total Active Reflection Coefficient) and the cross-correlation coefficient. In this paper, we use a new expression of the cross-correlation coefficient [1] to propose a method to optimize the MIMO performance through searching for proper surface current. The basic idea in [1] is to transfer the problem of computing cross correlation from the far zone to the radiating currents themselves via the cross-correlation Green’s function. Using this quantity, it is possible to directly manipulate current elements on the MIMO antennas in order to improve the correlation performance at the far zone. To illustrate this new methodology, we consider an array of three wire antennas at 60GHz. We show that a direct surface current optimization can be applied to minimize the cross-correlation coefficient. II.T HEORY A.The new expression of the cross-correlation coefficient The original definition of this coefficient uses the far-field radiated by antennas [2] is: ρ= |∫dΩE1(θ,φ).E?(θ,φ) 4π | √∫dΩ|E1(θ,φ)|2 4π √∫dΩ|E2(θ,φ)|2 4π (1) This expression gives an exact value of the cross-correlation coefficient but due to the necessity of a complete 3D measurement of the radiation pattern, it is computationally difficult to evaluate. An alternative method was proposed in [1]. If we consider two antennas (antenna 1 and antenna 2) of a receiving MIMO system, we can directly express the cross-correlation coefficient in terms of the current expression J1(r) and J2(r). Indeed, the numerator of (1) can be replaced by [1]: ∫dΩE1(r?).E2?(r?) 4π =∫d3r′∫d3r′′ V2 V1 J1(r′).C?(r′,r′′). J2*(r′′),(2) while the denominator of (1) involves ∫dΩ|E1(r?)|2 4π =∫d3r′∫d3r′′ V2 V1 J1(r′).C?(r′,r′′). J1*(r′′) (3) ∫dΩ|E2(r?)|2 4π =∫d3r′∫d3r′′ V2 V1 J2(r′).C?(r′,r′′). J2*(r′′)(4) Here, C?(r′,r′′) is called the cross-correlation Green’s function and is defined as [1] C?(r′,r′′)=∫dΩ[I?r?r] 4π e ik(r′?r′′).r? (5) where r′and r′′ vary on the surfaces of the two antennas, r?(θ,φ)=x?sinθcosφ+y?sinθsinφ+z?cosθ is the unit vector. I is the unit dyad and k is the wave number. The derivation of the expressions above is straightforward but lengthy and so will not be presented here. Details and verifications can be found in [1]. The results presented below were verified by comparison with a full-wave simulation conducted using CST. Equations (2) to (4) allow us to determine the cross-correlation coefficient in terms of the current distribution on both antennas. As a result, a current optimization scheme can be used to minimize this cross-correlation coefficient. In this paper, we will consider a continuous current optimization for an array of 3 wire antennas. B.Description of the optimization process Consider a case with two wire antennas, a schematic representation of the process is given in Fig. 1. Each dipole is segmented by an array of infinitesimal dipoles (in our case 5 infinitesimal dipoles). This segmentation allows us to model a continuous current distribution supported by each wire through a discrete approximation comprised of few infinitesimal dipoles. In general, arbitrary continuous currents can always be approximated with sufficiently large number of point sources. In this paper, we choose small number of infinitesimal dipoles to reduce the optimization cost. 9 978-1-4799-7815-1/15/$31.00 ?2015 IEEE AP-S 2015计算机仿真课程设计
【CN109994813A】圆极化变容管有源超表面带孔介质透镜天线【专利】
低副瓣毫米波介质透镜天线
微带天线仿真设计(5)讲解
MATLAB计算机仿真设计
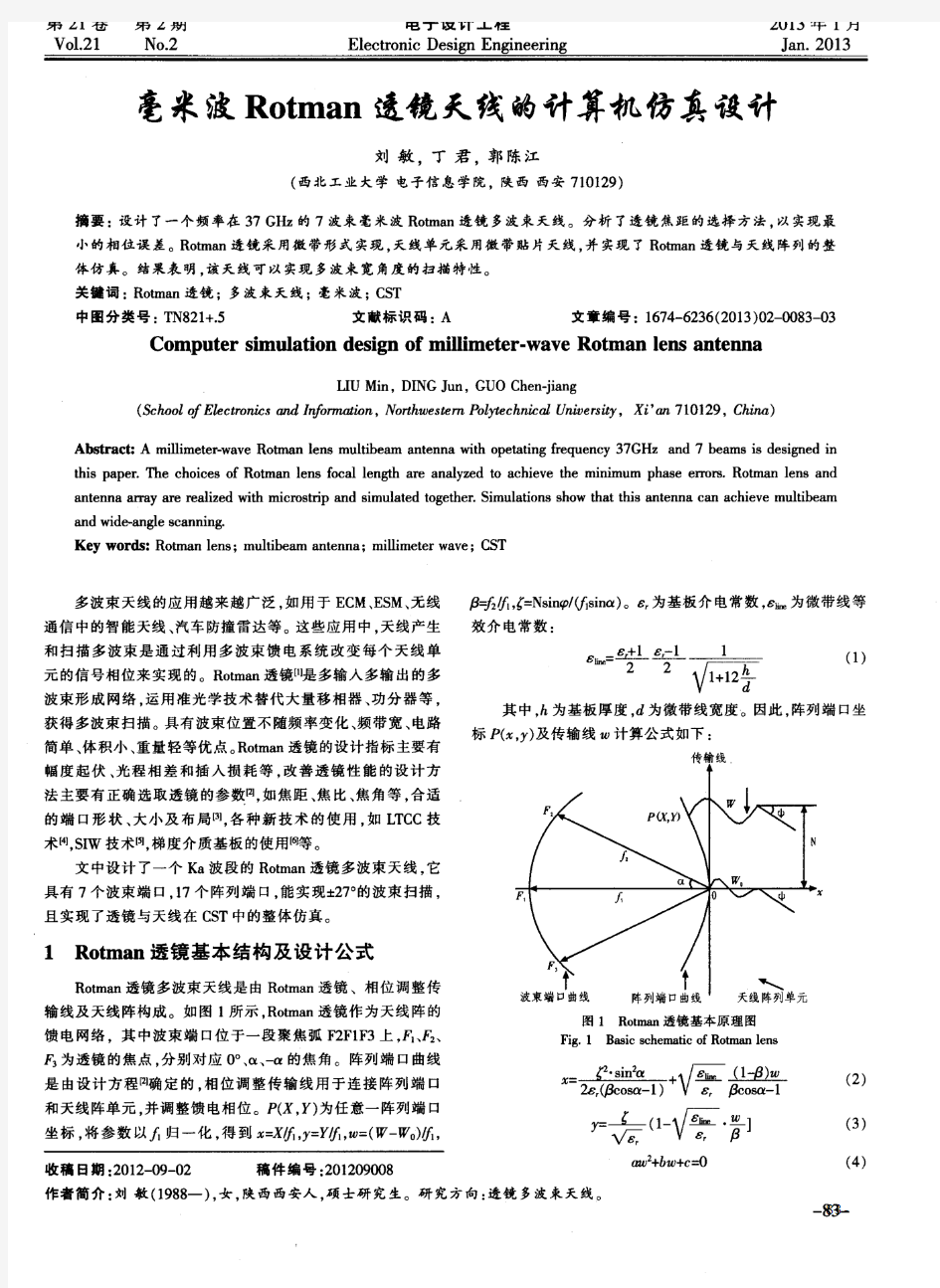
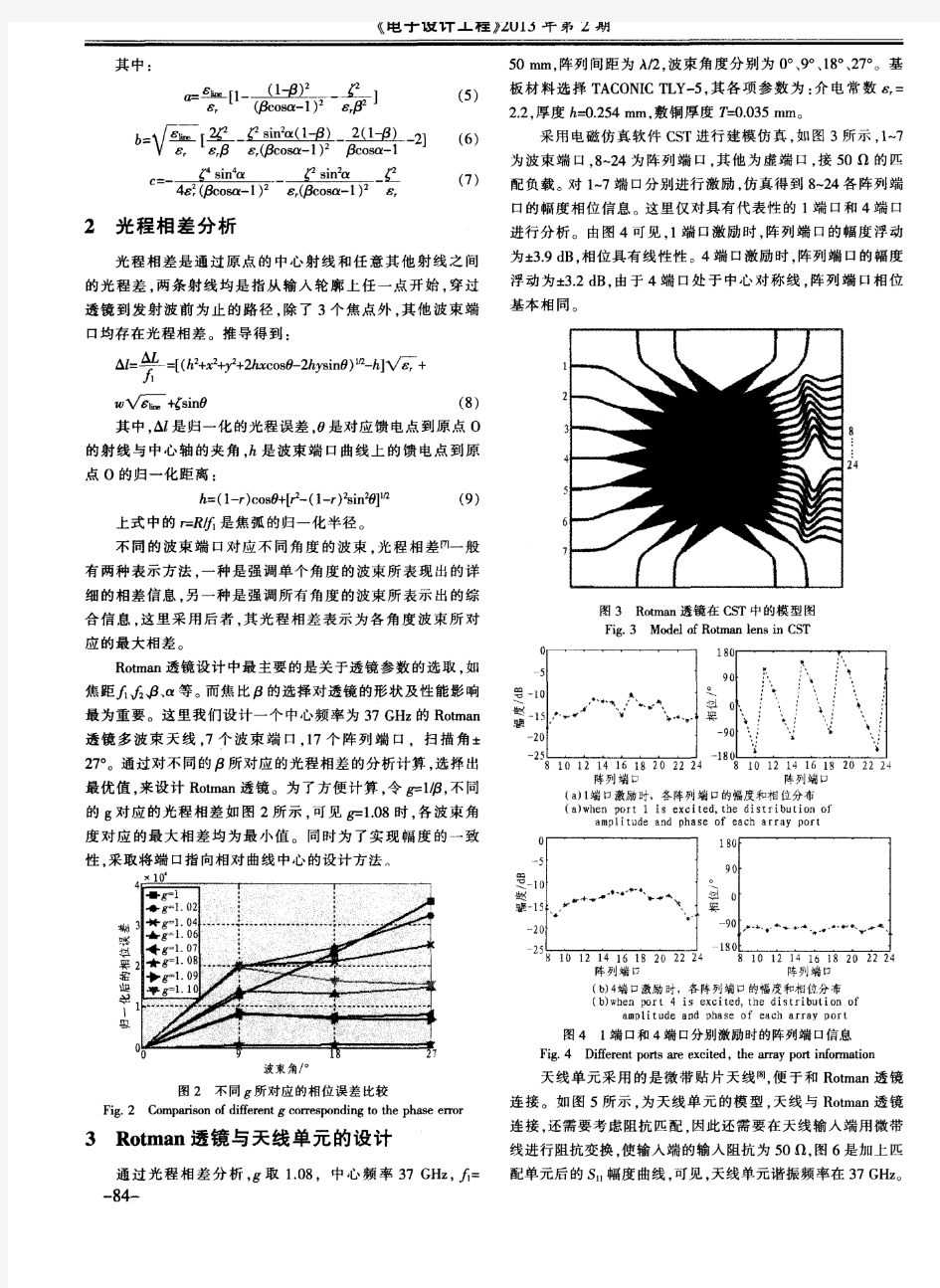
透镜天线