现代光学薄膜设计实例-期末设计报告
现代光学薄膜技术
期末报告
学院信息科学与技术学院系部电子工程系
专业 XXXXX 学号 XXXXXXXXXXXXXX 姓名 XXXXX 任课老师: XXXXX 完成时间 2014.6.8
现代光学薄膜技术
期末报告
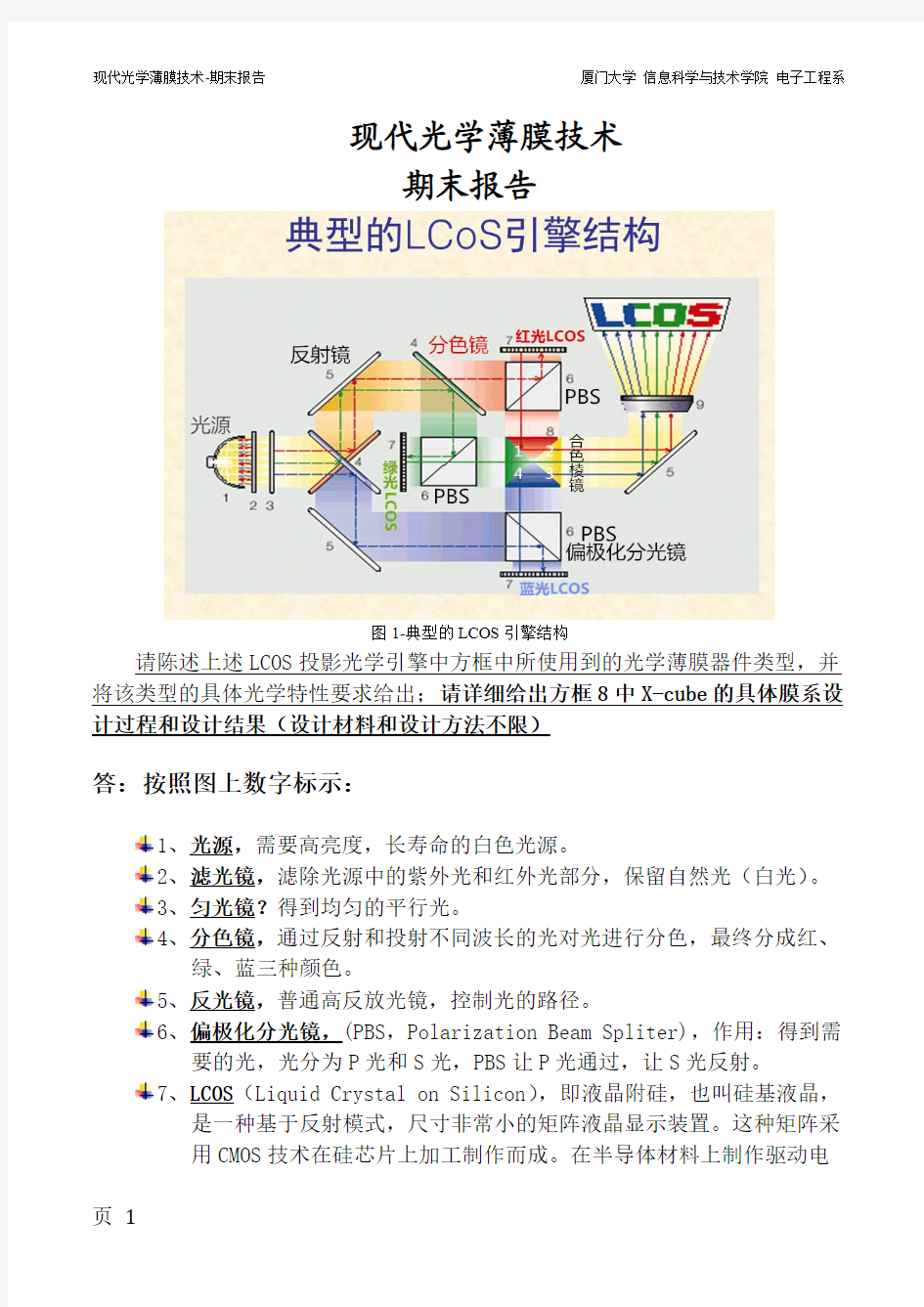
图1-典型的LCOS引擎结构
请陈述上述LCOS投影光学引擎中方框中所使用到的光学薄膜器件类型,并将该类型的具体光学特性要求给出;请详细给出方框8中X-cube的具体膜系设计过程和设计结果(设计材料和设计方法不限)
答:按照图上数字标示:
1、光源,需要高亮度,长寿命的白色光源。
2、滤光镜,滤除光源中的紫外光和红外光部分,保留自然光(白光)。
3、匀光镜?得到均匀的平行光。
4、分色镜,通过反射和投射不同波长的光对光进行分色,最终分成红、
绿、蓝三种颜色。
5、反光镜,普通高反放光镜,控制光的路径。
6、偏极化分光镜,(PBS,Polarization Beam Spliter),作用:得到需
要的光,光分为P光和S光,PBS让P光通过,让S光反射。
7、LCOS(Liquid Crystal on Silicon),即液晶附硅,也叫硅基液晶,
是一种基于反射模式,尺寸非常小的矩阵液晶显示装置。这种矩阵采
用CMOS技术在硅芯片上加工制作而成。在半导体材料上制作驱动电
路,并将主动像素(液晶)矩阵放置在半导体材料之上,在工作时,
LCoS只会对光线进行偏振处理,而不遮挡光线。三色光分别通过各自
的PBS后,会反射S偏光进入LCOS面板,当液晶显示为亮态时,S偏
光将改变成P偏光,最后组合调变过的三道P偏极光,投射至屏幕处
得到影像。
8、X-cube合光棱镜,来自三片LCOS调制过的三道P偏极光经过合光棱镜
会聚成一束光线。
9、投影镜,即成像透镜。合成光束经过投影机镜头照射到屏幕上,形成
彩色的图像。
X-cube合光棱镜具体膜系设计
由LCOS引擎结构图分析可知,X-cube合光棱镜如下图,可以分成四个部分胶合,胶合面有1、2、3、4需要镀光学薄膜,且可知胶合面1、3的薄膜一致,膜系要求对长波红光部分高反,同时对绿光蓝光高透。胶合面2、4的薄膜一致,应该对短波蓝光部分高反,同时对绿光红光高透。
这里我们取红绿蓝三个颜色的参考波长如下:
蓝光:430nm~450nm;绿光:490nm~580nm;红光:620nm~760nm。
图2-合色棱镜
长波通LPF的设计
红光:620nm~760nm;绿光:490nm~580nm;蓝光:430nm~450nm。
如图2,胶合面2、4上的设计的薄膜应满足通红光、绿光,反蓝光的长波通。
1、首先设定指标:由图可知工作环境,入射角度是45°,入射介质和出射介
质均为玻璃Glass,X-cube合光棱镜的入射光都是P偏正光,所以在设计过程中是针对P偏振光而非平均光。膜系要求在420nm~450nm波段透射率低于1%,在485nm以上波段透射率高于98%。
2、方案设计
●分析易得,可从设计一般的长波通膜系进行设计,采用长波通公式设计,
以【(0.5L H 0.5L)^m】的结构开始,材料选取常见的低折射率的SiO2与高折射率的TiO2。
●依据设计目标与环境【图3】,我们设计的长波通分界波长约在470nm,但
由于工作角度是45度,设计时实际参考波长会向短波飘,所以参考波长经过探索取570nm,【(0.5L H 0.5L)^m】中的m值取15,其他具体的优化选项的详见【图4】。初始设计结果未进行优化前如【图5】,显然在绿光波段不满足,需要进行优化。
图3 图4
●优化,短波端已满足要求,长波段需要进行进一步优化,经过一系列探索
和尝试,我们最后将优化参数设置成【图6】所示,优化结果如【图7】所示。
图5 LPF优化前结果
图6优化参数设定
图7 优化后结果
短波通SPF的设计
如图2,胶合面1、3上的设计的薄膜应满足通蓝光、绿光,反红光的短波通。
1、指标:入射角度是45°,入射介质和出射介质均为玻璃Glass,入射光都
是P偏正光。膜系要求在420nm~580nm波段透射率高于97%,在615nm以上波段透射率低于3%。
2、方案设计
●从设计一般的短波通膜系进行设计,采用短波通公式设计,以【(0.5H L
0.5H)^m】的结构开始,材料选取常见的低折射率的SiO2与高折射率的TiO2。
●依据设计目标与环境【图8】,我们设计的长波通分界波长约在600nm,同
样由于工作角度是45度,设计时实际参考波长会向短波飘,经过探索参考波长选取820nm,【(0.5H L 0.5H)^m】中的m值取25,其他具体的优化选项的详见【图9】。初始设计结果未进行优化前如【图10】,显然需要进行优化。
图8 图9
图10 SPF优化前
图11 最终优化参数选择
图12 SPF优化后
优化,大概趋势满足要求,需要进行进一步优化,经过一系列探索和尝试,我们最后将优化参数设置成【图11】所示,优化结果如【图12】所示。
设计总结与心得,
在设计时经过多次尝试之后发现,选好很多设计的参数以及公式很重要的,选好方案和参数往往使设计会更快甚至更好。
◆长波通LPF的设计
?在相同的优化方案下参考波长不同,优化的结果可能相差甚远。在此
次设计中,其他设计不变,仅仅改变参考波长时,在500nm~570nm的
都能得到相对满意的结果,但是当高于575nm时,优化结果就很差,
经过几番尝试570nm效果很好。
?优化间隔取值密度不同也可能使得结果相差甚远,甚至走向极端。在
此次设计中,优化时选取的波长密度不够时就无法得到满意的结果。
?最终设计结果:在P偏正光下完全满足设计预设目标。
◆短波通SPF的设计
?有时候优化参数不能一步到位,所以可以循序渐进设计出满意的结果。
?发现自己理论不足或者说能力不足,在短波通设计时候没法想长波通
那样设计出比较满意的结果,很难兼顾两个波段的目标值。
?最终设计结果:在P偏正光下基本满足设计预设目标。
◆优化方式薄膜设计
优化方式薄膜设计仅仅以LPF为例,结果不是很理想,具体不详述。主要是优化过程中的一些参数的限制设定。结果如下:总层数27层。
总之,在此番设计中对薄膜设计有了更加具体的理解,通过这门课的学习进一步理解薄膜在生活中的应用,虽谈不上专业,但是对很多生活中的薄膜应用应该大概可以说出个所以然来了,受益良多。
2014年6月8日星期日
现代控制理论实验报告
实验报告 ( 2016-2017年度第二学期) 名称:《现代控制理论基础》 题目:状态空间模型分析 院系:控制科学与工程学院 班级: ___ 学号: __ 学生姓名: ______ 指导教师: _______ 成绩: 日期: 2017年 4月 15日
线控实验报告 一、实验目的: l.加强对现代控制理论相关知识的理解; 2.掌握用 matlab 进行系统李雅普诺夫稳定性分析、能控能观性分析; 二、实验内容 1 第一题:已知某系统的传递函数为G (s) S23S2 求解下列问题: (1)用 matlab 表示系统传递函数 num=[1]; den=[1 3 2]; sys=tf(num,den); sys1=zpk([],[-1 -2],1); 结果: sys = 1 ------------- s^2 + 3 s + 2 sys1 = 1 ----------- (s+1) (s+2) (2)求该系统状态空间表达式: [A1,B1,C1,D1]=tf2ss(num,den); A = -3-2 10 B = 1 C = 0 1
第二题:已知某系统的状态空间表达式为: 321 A ,B,C 01:10 求解下列问题: (1)求该系统的传递函数矩阵: (2)该系统的能观性和能空性: (3)求该系统的对角标准型: (4)求该系统能控标准型: (5)求该系统能观标准型: (6)求该系统的单位阶跃状态响应以及零输入响应:解题过程: 程序: A=[-3 -2;1 0];B=[1 0]';C=[0 1];D=0; [num,den]=ss2tf(A,B,C,D); co=ctrb(A,B); t1=rank(co); ob=obsv(A,C); t2=rank(ob); [At,Bt,Ct,Dt,T]=canon(A,B,C,D, 'modal' ); [Ac,Bc,Cc,Dc,Tc]=canon(A,B,C,D, 'companion' ); Ao=Ac'; Bo=Cc'; Co=Bc'; 结果: (1) num = 0 01 den = 1 32 (2)能控判别矩阵为: co = 1-3 0 1 能控判别矩阵的秩为: t1 = 2 故系统能控。 (3)能观判别矩阵为: ob = 0 1
机械设计上机设计实验报告
机械设计上机设计 班级: 姓名: 学号:
目录 1.数表和线图的程序化处理 (1) 1.1数表的程序化 (1) 1.1.1查表检索法 (1) 1.1.2数表解析法 (12) 1.2线图的程序化 (15) 1.3有关数据处理 (16) 2.典型零部件的程序设计 (18) 2.1 V带传动的程序设计 (18) 2.2 齿轮传动的程序设计 (19) 2.3 滚动轴承的程序设计 (21) 3.课后习题计算 (22)
一、表和线图的程序化处理 1.1数表程序化 数表程序化有两种方法:一是查表检索法;二是数表解析法1.1.1 查表检索法 1)一元数表的存取 表1-1 普通V带型号及有关参数 运行界面:
程序代码: Private Sub Command1_Click() Dim s As Integer Dim q1 As Single, dm As Single, kb As Single s = Val(Txt_s.Text) Select Case s Case 0 q1 = 0.02: dm = 20: kb = 0.00006 Case 1 q1 = 0.06: dm = 50: kb = 0.00039 Case 2 q1 = 0.1: dm = 75: kb = 0.00103 Case 4 q1 = 0.17: dm = 125: kb = 0.00265 Case 5 q1 = 0.3: dm = 200: kb = 0.0075 Case 6 q1 = 0.62: dm = 355: kb = 0.0266 Case 7 q1 = 0.9: dm = 500: kb = 0.0498 End Select Txt_q1.Text = Str(q1) Txt_dmin.Text = Str(dm) Txt_kb.Text = Str(kb) End Sub Private Sub Command2_Click() End End Sub 2)二元数表的存取 表1-2齿轮传动工作状况系数K
用zemax设计光学显微镜光学系统设计实验报告
课 程 设 计 光学显微镜设计 设计题目 学 号 专业班级 指导教师 学生姓名 测量显微镜
根据学号得到自己设计内容的数据要求: 1.目镜放大率10(即焦距25) 2.目镜最后一面到物面距离110 3.对准精度1.2微米 按照实验步骤,先计算好外形尺寸。然后根据数据要求选取目镜与物镜。 我先做物镜。因为这个镜片比较少。按物镜放大率选好物镜后,将参数输入。简单优化,得到比较接近自己要求的物镜。 然后做目镜,同样的做法,这个按照焦距选目镜,将参数输入。将曲率半径设为可变量,调入默认的优化函数进行优化。发现“优化不了”,所有参数均没有变化。而且发现把光源放在“焦点”位置,目镜出射的不是平行光。我百思不得其解。开始认为镜头库的参数可能有问题。最后我问老师,老师解释,那个所谓的“焦点”其实不是焦点,我错误的把“焦点”到目镜第一个面的距离当成了焦距。这个目镜是有一定厚度的,不能简单等效成薄透镜。焦点到节点的距离才是焦距。经过老师指点后,我尝试调节光源到目镜第一面的距离,想得到出射平行光,从而找到焦点。但这个寻找是很费力气的,事倍功半。老师建议我把目镜的参数倒着顺序输入参数。然后用平行光入射,然后可以轻松找到焦点。 但是,按照这个方法,倒着输入参数,把光源放在无限
远的地方(平行光入射),发现光线是发散的。不解。还是按照原来的方法。把光源放在目镜焦点上,尽量使之出射平行光。然后把它与优化好的物镜拼接起来。后来,加入理想透镜(会聚平行光线),加以优化。 还有一个问题,就是选物镜的时候,发现放大倍率符合了自己的需求,但工作距离与共轭距,不符合自己的要求。这个问题在课堂上问过老师,后来经老师指点,通过总体缩放解决。 物镜参数及优化函数
现代控制理论实验
华北电力大学 实验报告| | 实验名称状态空间模型分析 课程名称现代控制理论 | | 专业班级:自动化1201 学生姓名:马铭远 学号:2 成绩: 指导教师:刘鑫屏实验日期:4月25日
状态空间模型分析 一、实验目的 1.加强对现代控制理论相关知识的理解; 2.掌握用 matlab 进行系统李雅普诺夫稳定性分析、能控能观性分析; 二、实验仪器与软件 1. MATLAB7.6 环境 三、实验内容 1 、模型转换 图 1、模型转换示意图及所用命令 传递函数一般形式: MATLAB 表示为: G=tf(num,den),,其中 num,den 分别是上式中分子,分母系数矩阵。 零极点形式: MATLAB 表示为:G=zpk(Z,P,K) ,其中 Z,P ,K 分别表示上式中的零点矩阵,极点矩阵和增益。 传递函数向状态空间转换:[A,B,C,D] = TF2SS(NUM,DEN); 状态空间转换向传递函数:[NUM,DEN] = SS2TF(A,B,C,D,iu)---iu 表示对系统的第 iu 个输入量求传递函数;对单输入 iu 为 1。
例1:已知系统的传递函数为G(S)= 2 2 3 24 11611 s s s s s ++ +++ ,利用matlab将传递函数 和状态空间相互转换。 解:1.传递函数转换为状态空间模型: NUM=[1 2 4];DEN=[1 11 6 11]; [A,B,C,D] = tf2ss(NUM,DEN) 2.状态空间模型转换为传递函数: A=[-11 -6 -11;1 0 0;0 1 0];B=[1;0;0];C=[1 2 4];D=[0];iu=1; [NUM,DEN] = ss2tf(A,B,C,D,iu); G=tf(NUM,DEN) 2 、状态方程状态解和输出解 单位阶跃输入作用下的状态响应: G=ss(A,B,C,D);[y,t,x]=step(G);plot(t,x). 零输入响应 [y,t,x]=initial(G,x0)其中,x0 为状态初值。
机械设计实验报告带传动
实验一 带传动性能分析实验 一、实验目的 1、了解带传动试验台的结构和工作原理。 2、掌握转矩、转速、转速差的测量方法,熟悉其操作步骤。 3、观察带传动的弹性滑动及打滑现象。 4、了解改变预紧力对带传动能力的影响。 二、实验内容与要求 1、测试带传动转速n 1、n 2和扭矩T 1、T 2。 2、计算输入功率P 1、输出功率P 2、滑动率ε、效率η。 3、绘制滑动率曲线ε—P 2和效率曲线η—P 2。 三、带传动实验台的结构及工作原理 传动实验台是由机械部分、负载和测量系统三部分组成。如图1-1所示。 1直流电机 2主动带轮 3、7力传感器 4轨道 5砝码 6灯泡 8从动轮 9 直流发电机 10皮带 图1-1 带传动实验台结构图 1、机械部分 带传动实验台是一个装有平带的传动装置。主电机1是直流电动机,装在滑座上,可沿滑座滑动,电机轴上装有主动轮2,通过平带10带动从动轮8,从动轮装在直流发电机9的轴上,在直流发电机的输出电路上,并接了八个灯泡,每个40瓦,作为发电机的负载。砝码通过尼龙绳、定滑轮拉紧滑座,从而使带张紧,并保证一定的预拉力。随着负载增大,带的受力增大,两边拉力差也增大,带的弹性滑动逐步增加。当带的有效拉力达到最大有效圆周力时,带开始打滑,当负载继续增加时则完全打滑。 2、测量系统 测量系统由转速测定装置和扭矩测量装置两部分组成。 (1)转速测定装置 用硅整流装置供给电动机电枢以不同的端电压实现无级调速,转动操纵面板上“调速”旋钮,即可实现无级调速,电动机无级调速范围为0~1500r/min ;两电机转速由光电测速装置测出,将转速传感器(红外光电传感器)分别安装在带轮背后的“U ”形糟中,由此可获得转速信号,经电路处理即可得到主、从动轮上的转速n 1、n 2。 (2)扭矩测量装置 电动机输出转矩1T (主动轮转矩)、和发电机输入转矩2T (从动轮转矩)采用平衡电机外壳(定子)的方法来测定。电动机和发电机的外壳支承在支座的滚动轴承中,并可绕转子的轴线摆动。当电动机通过带传动带动发电机转动后,由于受转子转矩的反作用,电动机定子将向转子旋转的相反方向倾倒,发电机的定子将向转子旋转的相同方向倾倒,翻转力的大小可通过力传感器测得,经过计算电路计算可得到作用于电机和发电机定子的转矩,其大小与主、从动轮上的转矩1T 、2T 相等。
设计性实验报告格式
大学物理设计性实验报告 实验项目名称:万用表设计与组装实验仪 姓名:李双阳学号:131409138 专业:数学与应用数学班级:1314091 指导教师:_王朝勇王新练 上课时间:2010 年12 月 6 日
一、实验设计方案 实验名称:万能表的设计与组装试验仪 实验时间:2010年12月6日 小组合作: 是 小组成员:孙超群 1. 实验目的:掌握数字万用表的工作原理、组成和特性。 2. 掌握数字万用表的校准和使用。 3. 掌握多量程数字万用表分压、分流电路计算和连接;学会设计制作、使用多量程数字万用表 2、实验地点及仪器、设备和材料: 万用表设计与组装实验仪、标准数字万用表。 3、实验思路(实验原理、数据处理方法及实验步骤等): 1. 直流电压测量电路 在数字电压表头前面加一级分压电路(分压电阻),可以扩展直流电压测量的量程。 数字万用表的直流电压档分压电路如图一所示,它能在不降低输入阻抗的情况下,达到准确的分压效果。 例如:其中200 V 档的分压比为: 001.010*********==+++++M K R R R R R R R 其余各档的分压比分别为: 档位 200mV 2V 20V 200V 2000V 分压比 1 0.1 0.01 0.001 0.0001 图一 实用分压器电路 实际设计时是根据各档的分压比和总电阻来确定各分压电阻的,如先确定 M R R R R R R 1054321=++++=总 再计算200V 档的电阻:K R R R 10001.021==+总,依次可计算出3R 、4R 、5R 等各档的分压电阻值。换量程时,多刀量程转换开关可以根据档位调整小数点的位置,使用者可方便地直读出测量结果。 尽管上述最高量程档的理论量程是2000V ,但通常的数字万用表出于耐压和安全考虑,规定最高电压量限为1000V 或750V 。
现代控制理论实验报告
现代控制理论实验报告
实验一系统能控性与能观性分析 一、实验目的 1.理解系统的能控和可观性。 二、实验设备 1.THBCC-1型信号与系统·控制理论及计算机控制技术实验平台; 三、实验容 二阶系统能控性和能观性的分析 四、实验原理 系统的能控性是指输入信号u对各状态变量x的控制能力,如果对于系统任意的初始状态,可以找到一个容许的输入量,在有限的时间把系统所有的状态引向状态空间的坐标原点,则称系统是能控的。 对于图21-1所示的电路系统,设iL和uc分别为系统的两个状态变量,如果电桥中 则输入电压ur能控制iL和uc状态变量的变化,此时,状态是能控的。反之,当 时,电桥中的A点和B点的电位始终相等,因而uc不受输入ur的控制,ur只能改变iL的大小,故系统不能控。 系统的能观性是指由系统的输出量确定所有初始状态的能力,如果在有限的时间根据系统的输出能唯一地确定系统的初始状态,则称系统能观。为了说明图21-1所示电路的能观性,分别列出电桥不平衡和平衡时的状态空间表达式: 平衡时:
由式(2)可知,状态变量iL和uc没有耦合关系,外施信号u只能控制iL的变化,不会改变uc的大小,所以uc不能控。基于输出是uc,而uc与iL无关连,即输出uc中不含有iL的信息,因此对uc的检测不能确定iL。反之式(1)中iL与uc有耦合关系,即ur的改变将同时控制iL和uc的大小。由于iL与uc的耦合关系,因而输出uc的检测,能得到iL 的信息,即根据uc的观测能确定iL(ω) 五、实验步骤 1.用2号导线将该单元中的一端接到阶跃信号发生器中输出2上,另一端接到地上。将阶跃信号发生器选择负输出。 2.将短路帽接到2K处,调节RP2,将Uab和Ucd的数据填在下面的表格中。然后将阶跃信号发生器选择正输出使调节RP1,记录Uab和Ucd。此时为非能控系统,Uab和Ucd没有关系(Ucd始终为0)。 3.将短路帽分别接到1K、3K处,重复上面的实验。 六、实验结果 表20-1Uab与Ucd的关系 Uab Ucd
机械设计实验报告
前言 一、实验课目的 本课程实验课目的在于:验证、巩固和加深课堂讲授的基本理论,加强理论联系实际及独立工作能力的培养;掌握一些最基本的机械实验方法、测量技能及用实验法来测定一些机械参数的能力;以及培养学生踏实细致、严肃认真的科学作风。因此,实验课是一个不可缺少的重要环节,每个学生必须认真对待,在课前进行预习,在课后分析试验结果,写成正规的实验报告。实验课为评定学生成绩的一部分。 二、实验前的准备工作 为了保证实验顺利进行,要求在实验前做好准备工作,教师在实验前要进行检查和提问,如发现有不合格者,提出批评,甚至停止实验的进行,实验准备工作包括下列几方面内容: 1.预习好实验指导书:明确实验的目的及要求;搞懂实验的原理;了解实验进行的步骤及主要事项,做到心中有底。 2.准备好实验指导书中规定自带的工具、纸张。 3.准备好实验数据记录表格。表格应记录些什么数据自拟。 三、遵守实验室的规章制度 1.验前必须了解实验设备、仪器的使用性能、操作规程及使用须知,否则不得操作。 2.严格按照规定,精心操作设备、仪器。 3.实验室内与本实验无关的设备与仪器,一律不得乱动。 4.在实验室严守纪律,不得高声谈笑,保持室内整洁。 5.实验完毕后,用过设备、仪器放回原处,并整理清洁、经教师同意后才得离开。 四、实验报告 实验报告是对实验所有数据、现象进行整理,分析得出一定结论与看法的书面文件。学生在实验后必须按照要求,整理并分析处理所的结果,写成正规的实验报告。 为了写好实验报告,提出以下几点: 1.实验结果记录应经实验指导教师过目签字,并随实验报告一起交上。 2.报告中的结果分析及讨论应力求具体,应针对试验具体情况,防止不切实际的空谈。 3.实验报告要求每人一份。 4.实验报告应在实验完毕后一星期内,由班委汇集交老师。 吉林大学珠海学院 机械工程学院 2018年9月10日
设计性实验报告
计算机与信息工程学院设计性实验报告 一、 实验目的 1.掌握线性时不变系统的两种描述形式—传递函数描述法、零极点增益描述法。 2.掌握两种描述形式之间的转换。 3.掌握连续和离散系统频率响应的求解 二、 实验仪器或设备 装MATLAB 软件的计算机一台。 三、 实验内容 1. 生成20个点的单位脉冲信号、单位阶跃信号,并记录下函数命令和波形。 2. 生成占空比为30%的矩形波。 3. 将连续系统 4)(s )21)(s (s 3) 1)(s -(s 0.5H(s)++++=转化为传递函数模型的描述形式。 4. 将离散系统 4-3-2-1--2 -10.5z 0.9z -1.3z 1.6z -12z 5z 3H(z)++++=转化为传递函数和零极点增益模型的的描述形式。
四、实验步骤(包括主要步骤、代码分析等) 1. 生成20个点的单位脉冲信号、单位阶跃信号,并记录下函数命令和波 形。 程序: clear,clc,close %清除变量空间变量,清除命令窗口命令,关闭图形窗口 t=-10:9; %取20个点 ft1=(t==0); %单位脉冲信号函数 ft2=(t>=0); %单位阶跃信号函数 subplot(1,2,1),stem(t,ft1,'m-o') %图像窗口1行2列的第1个子图绘制单位脉冲信号图形 title('20个点的单位脉冲信号'); %设置标题为“20个点的单位脉冲信号” subplot(1,2,2),stem(t,ft2) %图像窗口1行2列的第2个子图绘制单位阶跃信号图形 title('20个点的单位阶跃信号'); %设置标题为“20个点的单位阶跃信号” 2. 生成占空比为30%的矩形波。 程序: clear,clc,close %清除变量空间变量,清除命令窗口命令 x=0:0.001:0.6; %设置变量x的值范围 y=square(2*pi*10*x,30); %用square函数得到占空比为30%的矩形波 plot(x,y,'m'); %绘制矩形波的图像
现代控制理论实验报告河南工业大学
河南工业大学 现代控制理论实验报告姓名:朱建勇 班级:自动1306 学号:201323020601
现代控制理论 实验报告 专业: 自动化 班级: 自动1306 姓名: 朱建勇 学号: 201323020601 成绩评定: 一、实验题目: 线性系统状态空间表达式的建立以及线性变换 二、实验目的 1. 掌握线性定常系统的状态空间表达式。学会在MATLAB 中建立状态空间模型的方法。 2. 掌握传递函数与状态空间表达式之间相互转换的方法。学会用MATLAB 实现不同模型之 间的相互转换。 3. 熟悉系统的连接。学会用MATLAB 确定整个系统的状态空间表达式和传递函数。 4. 掌握状态空间表达式的相似变换。掌握将状态空间表达式转换为对角标准型、约当标准 型、能控标准型和能观测标准型的方法。学会用MATLAB 进行线性变换。 三、实验仪器 个人笔记本电脑 Matlab R2014a 软件 四、实验内容 1. 已知系统的传递函数 (a) ) 3()1(4)(2++=s s s s G
(b) 3486)(22++++=s s s s s G
(c) 6 1161)(232+++++=z z z z z z G (1)建立系统的TF 或ZPK 模型。 (2)将给定传递函数用函数ss( )转换为状态空间表达式。再将得到的状态空间表达式用函 数tf( )转换为传递函数,并与原传递函数进行比较。 (3)将给定传递函数用函数jordants( )转换为对角标准型或约当标准型。再将得到的对角 标准型或约当标准型用函数tf( )转换为传递函数,并与原传递函数进行比较。 (4)将给定传递函数用函数ctrlts( )转换为能控标准型和能观测标准型。再将得到的能控标 准型和能观测标准型用函数tf( )转换为传递函数,并与原传递函数进行比较。
《机械设计》实验报告
一、目的与要求 1、根据给定的实验内容、设备及条件,通过实验,达到开发、培养、提高学生的动手能力,了解、掌握机械运动的一般规律以及现代测试原理和方法,增强创新意识与工程实践能力。实现预期实验目的。 2、根据实验项目要求,进行有关“带传动”、“链传动”、“齿轮传动”、“蜗杆传动”及“综合机械传动”等实验方案的创意设计、实验装置的设计、搭接、组装及调试、实验测试方法的选择、实际操作规程的制订、实验数据测试、实验结果分析及绘制实验装置的结构简图。 二、提供设备如下 1、动力装置 ⑴普通电机Y90L—4—1.5 额定功率 1.5Kw 满载转速1420r/min ⑵变频交流电机 额定功率 1.5kW 转速1~6000r/min 2、测试装置 ⑴转速转矩测量仪额定转矩50N·m 转速范围0~6000r/min ⑵机械效率仪 3、传动装置 ⑴圆柱齿轮减速噐 减速比1:1.5,齿数Z1 =32,Z2 = 48 , 螺旋角β=8。4‘9‘‘,中心距a=100mm 法面模数m n =2.5; ⑵蜗杆减速器 蜗杆类型ZA,轴向模数m=3.250,,蜗杆头数Z1 =4, 蜗杆齿数Z2 =30,减速比1:1.7,中心距a=63mm; ⑶V型带传动件 型号Z-1041,带轮基准直径d=106mm; ⑷链传动件
链号:08A,链节距p=12.70mm,链轮齿数Z=21 。 4、加载装置 C Z5磁粉制动器额定转矩50N·m 滑差功率4kw 三、实验内容 1、实验方案设计; 2、传动方案选择设计; 3、实验装置搭建及调试; 4、实验结果测试; 5、绘制实验装置的结构简图; 6、实验结果分析报告。 四、注意事项 1、增强创新意识与工程实践能力,树立严肃认真、一丝不苟的工作精神,养成实验时的正确方法和良好习惯,维护国家财产不受损失; 2、注意保持实验室内整洁,严格遵守实验室的规章制度; 3、实验装置搭建完成后,须经指导老师检查、审定后方可开机操作; 4、实验室严格遵守设备及仪器操作规程,注意人生安全; 5、实验结束后应整理全部仪器、装置及附件,并恢复原位; 6、认真完成实验报告 五、操作步骤 1、接通电源,打开水源、效率仪、稳流电源,启动电机,打开计算机,点击“机械设计多功能实验台”,进入主界面。 2、关闭电机,断开动力装置与被测装置之间的联轴器,将效率仪输入调零。 3、还原动力装置与被测装置之间的联轴器,启动电机,将效率仪的输出调零。 4、点击“新建”进入测试菜单,点击“连续采集”正式进入实验。 5、顺时针转动稳流电源激磁电钮,缓慢均匀加载,加载完毕,点击“结束采集”,同时将激磁电钮回零。 6、储存数据、数据处理、打印结果 注意:输入功率<2kw、激磁电流<0.3A
现代控制理论课程报告
现代控制理论课程总结 学习心得 从经典控制论发展到现代控制论,是人类对控制技术认识上的一次飞跃。现代控制论是用状态空间方法表示,概念抽象,不易掌握。对于《现代控制理论》这门课程,在刚拿到课本的时候,没上张老师的课之前,咋一看,会认为开课的内容会是上学期学的控制理论基础的累赘或者简单的重复,更甚至我还以为是线性代数的复现呢!根本没有和现代控制论联系到一起。但后面随着老师讲课的风格的深入浅出,循循善诱,发现和自己想象的恰恰相反,张老师以她特有的讲课风格,精心准备的ppt 课件,向我们展示了现代控制理论发展过程,以及该掌握内容的方方面面,个人觉得,我们不仅掌握了现代控制理论的理论知识,更重要的是学会了掌握这门知识的严谨的逻辑思维和科学的学习方法,对以后学习其他知识及在工作上的需要大有裨益,总之学习了这门课让我受益匪浅。 由于我们学习这门课的课时不是很多,并结合我们学生学习的需求及所要掌握的课程深入程度,张老师根据我们教学安排需要,我们这学期学习的内容主要有:1.绪论;2.控制系统的状态表达式;3.控制系统状态表达式的解;4.线性系统的能空性和能观性;5.线性定常系统的综合。而状态变量和状态空间表达式、状态转移矩阵、系统的能控性与能观性以及线性定常系统的综合是本门课程的主要学习内容。当然学习的内容还包括老师根据多年教学经验及对该学科的研究的一些深入见解。 在现代科学技术飞速发展中,伴随着学科的高度分化和高度综合,各学科之间相互交叉、相互渗透,出现了横向科学。作为跨接于自然科学和社会科学的具有横向科学特点的现代控制理论已成为我国理工科大学高年级的必修课。 经典控制理论的特点 经典控制理论以拉氏变换为数学工具,以单输入-单输出的线性定常系统为主要的研究对象。将描述系统的微分方程或差分方程变换到复数域中,得到系统的传递函数,并以此作为基础在频率域中对系统进行分析和设计,确定控制器的结构和参数。通常是采用反馈控制,构成所谓闭环控制系统。经典控制理论具有明显的局限性,突出的是难以有效地应用于时变系统、多变量系统,也难以揭示系统更为深刻的特性。当把这种理论推广到更为复杂的系统时,经典控制理论就显得无能为力了,这是因为它的以下几个特点所决定。 1.经典控制理论只限于研究线性定常系统,即使对最简单的非线性系统也是无法处理的;这就从本质上忽略了系统结构的内在特性,也不能处理输入和输出皆大于1的系统。实际上,大多数工程对象都是多输入-多输出系统,尽管人们做了很多尝试,但是,用经典控制理论设计这类系统都没有得到满意的结果;2.经典控制理论采用试探法设计系统。即根据经验选用合适的、简单的、工程上易于实现的控制器,然后对系统进行分析,直至找到满意的结果为止。虽然这种设计方法具有实用等很多完整,从而促使现代控制理论的发展:对经典理论的精确化、数学化及理论化。优点,但是,在推理上却是不能令人满意的,效果也
机械振动实验报告
《机械振动基础》实验报告 (2015年春季学期) 姓名 学号 班级 专业机械设计制造及其自动化报告提交日期2015.05.07 哈尔滨工业大学
报告要求 1.实验报告统一用该模板撰写,必须包含以下内容: (1)实验名称 (2)实验器材 (3)实验原理 (4)实验过程 (5)实验结果及分析 (6)认识体会、意见与建议等 2.正文格式:四号字体,行距为1.25倍行距; 3.用A4纸单面打印;左侧装订; 4.报告需同时提交打印稿和电子文档进行存档,电子文档由班长收 齐,统一发送至:liuyingxiang868@https://www.360docs.net/doc/9515582657.html,。 5.此页不得删除。 评语: 教师签名: 年月日
实验一报告正文 一、实验名称:机械振动的压电传感器测量及分析 二、实验器材 1、机械振动综台实验装置(压电悬臂梁) 一套 2、激振器一套 3、加速度传感器一只 4、电荷放大器一台 5、信号发生器一台 6、示波器一台 7、电脑一台 8、NI9215数据采集测试软件一套 9、NI9215数据采集卡一套 三、实验原理 信号发生器发出简谐振动信号,经过功率放大器放大,将简谐激励信号施加到电磁激振器上,电磁激振器振动杆以简谐振动激励安装在激振器上的压电悬臂梁。压电悬臂梁弯曲产生电流显示在示波器上,可以观测悬臂梁的振动情况;另一方面,加速度传感器安装在电磁激振器振动杆上,将加速度传感器与电荷放大器连接,将电荷放大器与数据采集系统连接,并将数据采集系统连接到计算机(PC机)上,操作NI9215数据采集测试软件,得到机械系统的振动响应变化曲线,可以观测电磁激振器的振动信号,并与信号发生器的激励信号作对比。实验中的YD64-310型压电式加速度计测得的加速度信号由DHF-2型电荷放大器后转变为一个电压信号。电荷放大器的内部等效电路如图1所示。 q
显微镜系统设计实验报告
光学系统设计实验报告 设计题目:测量显微镜光学系统 专业班级:光信息08-1班 学生姓名: 学号: 指导老师:
一实验目的 1.了解光学系统设计的基本步骤,学会基本外形尺寸的计算。 2.熟悉ZEMAX软件的操作,了解操作要领,学会应用基本的相差 评价函数并进行优化。 二、实验器材 ZEMAX软件、相关实验指导书 三、设计要求 1)设计说明书和镜头文件。镜头文件包括物镜镜头文件、目镜镜头文件和光学系统镜头文件。 2)部分技术参数选择: ①目镜放大率10 ②沿光轴,目镜最后一面到物面沿光轴的几何距离280毫米 ③对工件实边缘的对准精度为2.2微米 ④其它参数自定 3)其他要求 ①视场大小自定,尽可能大些,一般达到商用仪器的一半。 ②可以不加棱镜。如加棱镜,折转角大小自定。棱镜可以按照等效玻璃板处理。 ③可以对物镜和目镜进行整体优化或独立优化。 ④可以加上CCD。 四、具体设计 1.系统结构设计思路 1)系统结构框图
物体经物镜所成的放大的实像与分划板重合,两者一同经目镜成一放大的虚像。棱镜的型式为斯米特屋脊棱镜,它能使系统成正像,并且使光路转折45°角,以便于观察和瞄准(此处可以不加设计)。为避免景深影响瞄准精度,物镜系统采用物方远心光路,即孔径光阑位于物镜像方焦面上。 (图1 显微镜系统结构图) 2)等效光路原理图
(图2 显微镜无光轴偏转的等效光路图) 2.外形尺寸计算 1)首先绘出光学系统的等效光路原理图。如图所示,首先将棱镜作为等效空气平板处理。 2)求实际放大率。系统的有效放大率由系统的瞄准精度决定。用米字形虚线瞄准被测件轮廓,得系统有效放大率 由于工具显微镜一般要求有较大的工作距和物方线视场,又要求共轭距不能太长,因而工具显微镜的实际放大率和物镜的放大率均不宜过大。取实际放大率为 3)求数值孔径 4)求物镜和目镜的放大率 目镜的放大率 物镜的放大率 5)求目镜的焦距 ? -=Γ30102.02 .21.500055 .061.061.0 nsinU ≈??===δλk NA 3 -=ΓΓ =e β?=Γ10e mm f e e 25250 =Γ= '? ≥?=≥ Γ222 .21.55 .725.72δk
苯妥英钠设计性实验报告
设计性实验报告 实验名称:苯妥英钠的制备与分析 姓名:闫洁 班级: 学号:39 日期:2015.11.2
设计性实验报告 一、实验目的 1.学习安息香缩合反应的原理和应用维生素B1及氰化钠为催化剂进行反应的实验方法。 2.学习有害气体的排出方法。 3.学习二苯羟乙酸重排反应机理。 4.掌握用硝酸氧化的实验方法。 二、实验方案一 1、实验原理 1.安息香缩合反应(安息香的制备) 2.氧化反应(二苯乙二酮的制备) 3.二苯羟乙酸重排及缩合反应(苯妥英的制备) 4.成盐反应(苯妥英钠的制备) 2、实验仪器与药品 仪器:烧杯(500 ml 250 ml )量筒、锥形瓶、三颈瓶、抽滤瓶、球形冷凝管、干燥管、水浴锅、布氏漏斗、温度计、玻璃棒、抽滤器、 药品:苯甲醛、盐酸硫胺、氢氧化钠、无水乙醇、硝酸、浓盐酸 CHO VitB 1or NaCN O H HNO 3 O O O O H O O 1.H 2NCO NH 2/NaO H 2.HCl N H O O H 5C 6H 5C 6N H N H N O O Na H 5C 6H 5C 6 N H O OH H 5C 6 H 5C 6N O H 2NaOH
4、实验装置图 5、实验步骤 (一)安息香的制备(盐酸硫胺催化) 1.原料规格及用量配比 名称规格用量摩尔数摩尔比 苯甲醛CP d 1.050 bp179.9℃20 ml0.2 盐酸硫胺原料药 3.5 g 氢氧化钠CP10 ml 2. 操作 在100 ml三口瓶中加入3.5 g盐酸硫胺(Vit.B1)和8 ml水,溶解后加入95%乙醇30 ml。搅拌下滴加2 mol/L NaOH溶液10 m1。再取新蒸苯甲醛20 ml,加入上述反应瓶中。水浴加热至70℃左右反应1.5 h。冷却,抽滤,用少量冷水洗涤。干燥后得粗品。测定熔点,计算收率。mp 136—l37℃ 注:也可采用室温放置的方法制备安息香,即将上述原料依次加入到100 ml三角瓶中,室温放置有结晶析出,抽滤,用冷水洗涤。于燥后得粗品。测定熔点,计算收率。 (二)二苯乙二酮(联苯甲酰)的制备 1.主要原料规格及用量比 名称规格用量摩尔数摩尔比 安息香自制8.5 g0.04 1 硝酸(65%-68%) CP d 1.40 bp122℃25 ml0.379.25 2.操作 取8.5 g粗制的安息香和25 ml硝酸(65%-68%)置于100 ml圆底烧瓶中,安装冷凝器和气体连续吸收装置,低压加热并搅拌,逐渐升高温度,直至二氧化氮逸去(约1.5—2 h)。反应完毕,在搅拌下趁热将反应液倒入盛有150 ml冷水的烧杯中,充分搅拌,直至油状物呈黄色固体全部析出。抽滤,结晶用水充分洗涤至中性,干燥,得粗品。用四氯化碳重结晶(1:2),也可用乙醇重结晶(1:25),mp.94—96℃。 (三)苯妥英的制备
现代控制理论实验报告3
实验三 利用MATLAB 导出连续状态空间模型的离散化模型 实验目的: 1、基于对象的一个连续时间状态空间模型,导出其相应的离散化状态空间模型; 2、通过编程、上机调试,掌握离散系统运动分析方法。 实验原理: 给定一个连续时间系统的状态空间模型: ()()()()()() x t Ax t Bu t y t Cx t Du t =+=+ (3.1) 状态空间模型(3.1)的输入信号()u t 具有以下特性: ()(),u t u kT kT t kT T =≤≤+ (3.2) 已知第k 个采样时刻的状态()x kT 和第k 个采样时刻到第1k +个采样时刻间的输入()()u t u kT =,可得第1k +个采样时刻(1)k T +处的状态 (1)((1))((1))()((1))()k T kT x k T k T kT x kT k T Bu d τττ++=Φ+-+Φ+-? (3.3) 其中: ((1))((1))A k T kT AT k T kT e e +-Φ+-== ((1))((1))A k T k T e ττ+-Φ+-= 由于输入信号在两个采样时刻之间都取常值,故对式(3.3)中的积分式进行一个时间变量替换(1)k T στ=+-后,可得 0((1))()()()AT A x k T e x kT e d Bu kT τ σσ+=+? (3.4) 另一方面,以周期T 对输出方程进行采样,得到 ()()()y kT Cx kT Du kT =+ 在周期采样的情况下,用k 来表示第k 个采样时刻kT 。因此,连续时间状态空间模型
(3.1)的离散化方程可以写成 (1)()()()()()()() x k G T x k H T u k y k Cx k Du k +=+=+ (3.5) 其中: 0()()()AT A G T e H T e d B τσσ==? (3.6) 已知系统的连续时间状态空间模型,MATLAB 提供了计算离散化状态空间模型中状态矩阵和输入矩阵的函数: [G ,H]=c2d(A,B,T) 其中的T 是离散化模型的采样周期。 实验步骤 1、导出连续状态空间模型的离散化模型,采用MA TLAB 的m-文件编程; 2、在MA TLAB 界面下调试程序,并检查是否运行正确。 例3.1 已知一个连续系统的状态方程是 010()()()2541x t x t u t ????=+????--???? 若取采样周期0.05T =秒,试求相应的离散化状态空间模型。 编写和执行以下的m-文件: A=[0 1;-25 –4]; B=[0;1]; [G ,H]=c2d(A,B,0.05) 得到 G= 0.9709 0.0448 -1.1212 0.7915 H= 0.0012 0.0448 因此,所求的离散化状态空间模型是 0.97090.04480.0012(1)()()1.12120.79150.0448x k x k u k ????+=+????-????
机械设计实验报告 修改版(赵扬)
机械设计基础(A2)实验报告 班级: 学号: 姓名: 沈阳理工大学
一.皮带传动实验报告 ----------------------------------实验指导教师------------------ 日期:----------------- 专业班级:----------------- 成绩:------------ 学号:------------ 姓名:------------ 1.1.实验目的 1.2.实验机构造及测试原理 1.3.实验步骤 1.4.数据和曲线
二.齿轮传动效率实验报告 ----------------------------------实验指导教师------------------ 日期:----------------- 专业班级:----------------- 成绩:------------ 学号:------------ 姓名:------------ 2.1.实验目的 2.2.实验机构及测试原理 2.3.实验步骤 2.4.数据和曲线
2.5.思考题 (1)T9-T1基本上为直线关系,为什么T9-η为曲线关系? (2)哪些因素影响齿轮传动的效率?加载力矩的测量中存在哪些误差? (3)提高齿轮传动效率的措施有哪些?
三.HS-A型液体动压轴承实验报告 ----------------------------------实验指导教师------------------ 日期:----------------- 专业班级:----------------- 成绩:------------ 学号:------------ 姓名:------------ 3.1.实验目的 3.2.实验机构及测试原理 3.3.实验步骤 3.4.数据和曲线
光学实验报告 (一步彩虹全息)
光学设计性实验报告(一步彩虹全息) 姓名: 学号: 学院:物理学院
一步彩虹全息 摘要彩虹全息是用激光记录全息图, 是用白光再现单色或彩色像的一种全息技术。彩虹全息术的关键之处是在成像光路( 即记录光路) 中加入一狭缝, 这样在干板上也会留下狭缝的像。本文研究了一步彩虹全息图的记录和再现景象的基本原理、一步彩虹全息图与普通全息图的区别和联系、一步彩虹全息的实验光路图,探讨了拍摄一步彩虹全息图的技术要求和注意事项,指出了一步彩虹全息图的制作要点, 得出了影响拍摄效果的佳狭缝宽度、最佳狭缝位置及曝光时间对彩虹全息图再现像的影响。 关键词:一步彩虹全息;狭缝;再现 1 光学实验必须要严密,尽可能地减少实验所产生的误差; 2 实验仪器 防震全息台激光器分束镜成像透镜狭缝干板架光学元件架若干干板备件盒洗像设备一套线绳辅助棒扩束镜2个反射镜2个 3 实验原理 3.1 像面全息图 像面全息图的拍摄是用成像系统使物体成像在全息底板上,在引入一束与之相干的参考光束,即成像面全息图,它可用白光再现。再现象点的位置随波长而变化,其变化量取决于物体到全息平面的距离。 像面全息图的像(或物)位于全息图平面上,再现像也位于全息图上,只是看起来颜色有变化。因此在白光照射下,会因观察角度不同呈现的颜色亦不同。 3.2 彩虹全息的本质 彩虹全息的本质是要在观察者与物体的再现象之间形成一狭缝像,使观察者通过狭缝像来看物体的像,以实现白光再现单色像。若观察者的眼睛在狭缝像附近沿垂直于狭缝的方向移动,将看到颜色按波长顺序变化的再现像。若观察者的眼睛位于狭缝像后方适当位置, 由于狭缝对视场的限制, 通过某一波长所对应的狭缝只能看到再现像的某一条带, 其色彩与该波长对应, 并且狭缝像在空间是连
大学物理设计性实验设计性实验报告
大学物理实验设计性实 验 --电位差计测金属丝电 阻率 姓名:马野 班级:土木0944 学号: 0905411418 指导教师:曹艳玲 实验地点:大学物理实验教学中心
【实验目的】 1. 了解电位差计的结构,正确使用电位差计; 2掌握电位差的工作原理—补偿原理。 3能用电位差计校准电表和电阻率的测定。 4学习简单电路的设计方法,培养独立工作的能力。 【实验原理】 利用电位差计,通过补偿原理,来测定未知电阻和已知电阻两端的 电压,利用分压原理,算出未知电阻的阻值,利用螺旋测微器和刻度尺测出电阻丝的长度和横截面积的直径,通过电阻率公式即可计算出电阻率。 补偿原理 在图1的电路中,设E 0是电动势可调的标准电源,Ex 是待测电池的电动势(或待测电压Ux ),它们的正负极相对并接,在回路串联上一只检流计G ,用来检测回路中有无电流通过。设E 0的内阻为r 0;Ex 的内阻为 rx 。根据欧姆定律,回路的总电流为: 电位差原理 如果我们调节E 0使E 0和Ex 相等,由(1)式可知,此时I =0,回路无电流通过,即检流计指针不发生偏转。此时称电路的电位达到补偿。在电位补 R R r r E E I g x x +++-= 00 图1 补偿原理 x
偿的情况下,若已知E 0的大小,就可确定Ex 的大小。这种测定电动势或电压的方法就叫做补偿法。 显然,用补偿法测定Ex ,必须要求E 0可调,而且E 0的最大值E 0max >Ex ,此外E 0还要在整个测量过程中保持稳定,又能准确读数。在电位差计中,E 0是用一个稳定性好的电池(E )加上精密电阻接成的分压器来代替的,如图2所示。 图2中,由电源E 、限流电阻R 1以及均匀电阻丝RAD 构成的回路叫做工作回路。由它提供稳定的工作电流I 0,并在电阻RAD 上产生均匀的电压降。改变B 、C 之间的距离,可以从中引出大小连续变化的电压来,起到了与E 0相似的作用。为了能够准确读出该电压的读数,使用一个标准电池进行校准。换接开关K 倒向“1”端,接入标准电池E S ,由E S 、限流电阻R 2、检流计G 和RBC 构成的回路称为校准回路。把B 、C 固定在适当的位置(如图中的位置),设RBC =R S ,调节R 1(即调节I 0),总可以使校准回路的电流为零,即R S 上的电压降与E S 之间的电位差为零,达到补偿。 图2 电位差计原理图 x
利用MATLAB设计状态观测器—现代控制理论实验报告
实验六利用MATLAB设计状态观测器 ******* 学号 1121*****
实验目的: 1、学习观测器设计算法; 2、通过编程、上机调试,掌握基于观测器的输出反馈控制系统设计方法。 实验原理: 1、全阶观测器模型: () ()x Ax Bu L y Cx A LC x Bu Ly =++-=-++ 由极点配置和观测器设计问题的对偶关系,也可以应用MATLAB 中极点配置的函数来确定所需要的观测器增益矩阵。例如,对于单输入单输出系统,观测器的增益矩阵可以由函数 L=(acker(A ’,C ’,V))’ 得到。其中的V 是由期望的观测器极点所构成的向量。类似的,也可以用 L=(place(A ’,C ’,V))’ 来确定一般系统的观测器矩阵,但这里要求V 不包含相同的极点。 2、降阶观测器模型: ???w Aw By Fu =++ b x w Ly =+ 基于降阶观测器的输出反馈控制器是: ????()[()]()b a b b a b w A FK w B F K K L y u K w K K L y =-+-+=--+ 对于降阶观测器的设计,使用MATLAB 软件中的函数 L=(acker(Abb’,Aab’,V))’ 或 L=(place(Abb’,Aab’,V))’ 可以得到观测器的增益矩阵L 。其中的V 是由降阶观测器的期望极点所组成的向量。 实验要求 1.在运行以上例程序的基础上,考虑图6.3所示的调节器系统,试针对被控对象设计基于全阶观测器和降 阶观测器的输出反馈控制器。设极点配置部分希望的闭环极点是1,22j λ=-± (a ) 对于全阶观测器,1 8μ=-和 28μ=-; (b ) 对于降阶观测器,8μ=-。 比较系统对下列指定初始条件的响应: (a ) 对于全阶观测器: 1212(0)1,(0)0,(0)1,(0)0x x e e ==== (b ) 对于降阶观测器: 121(0)1,(0)0,(0)1x x e === 进一步比较两个系统的带宽。