LMS+Virtual+Lab+Motion与MATLAB的联合仿真

与MATLAB的联合仿真
这一节的主要目的是介绍https://www.360docs.net/doc/9d17007060.html,b与MATLAB/Simulink的联合仿真,例子中的模型仿真飞机起落架的着陆过程,模型中的减震器是利用MATLAB/Simulink建立的。仿真模型如下。
在进行联合仿真前,需要启动MATLAB。如果你有https://www.360docs.net/doc/9d17007060.html,b与MATLAB/Simulink的License,那么你选择Start All Programs LMS https://www.360docs.net/doc/9d17007060.html,b Tools-Rev7B Motion
Matlab(在安装https://www.360docs.net/doc/9d17007060.html,b时必选选择安装与MATLAB的接口才有Motion Matlab选项),就能在启动https://www.360docs.net/doc/9d17007060.html,b的同时已经将MATLAB启动了,前提是你计算机上已经装了MATLAB。
一、创建Plant Input/Output单元
1、选择File Open,找到文件MLG_L.CATAnalysis并打开它。
2、进入机构设计平台,点击Two Body Plant Output按钮,添加一个监测距离的控
制单元,弹出如下所示的对话框。
3、在Body1中选择Product1_ROOT l_mlg (l_mlg.1)l_oleo_cyl (l_oleo_cyl.1)
l_oleo_cyl Axis Systems tsda.l_oleo_stop.t1,在Body2中选择
Product1_ROOT l_mlg (l_mlg.1)l_oleo_pist (l_oleo_pist.1)l_oleo_pist
Axis Systems tsda.l_oleo_stop.t2。
4、Type项选择DISTANCE,在Node项右击选择New Node,设置Node name为dist,点
击ok关闭对话框。
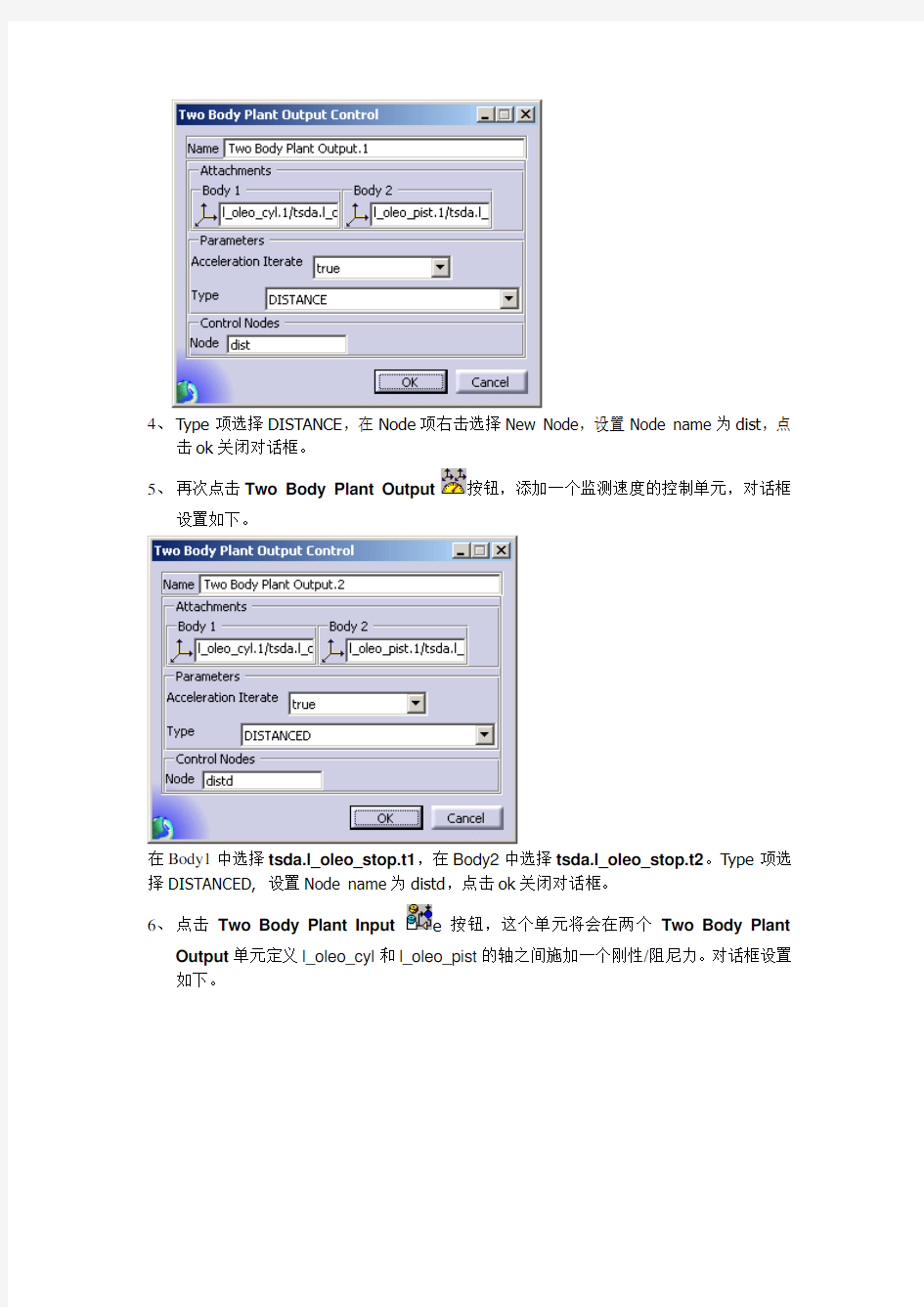
5、再次点击Two Body Plant Output按钮,添加一个监测速度的控制单元,对话框
设置如下。
在Body1中选择tsda.l_oleo_stop.t1,在Body2中选择tsda.l_oleo_stop.t2。Type项选择DISTANCED, 设置Node name为distd,点击ok关闭对话框。
6、点击Two Body Plant Input e按钮,这个单元将会在两个Two Body Plant
Output单元定义l_oleo_cyl和l_oleo_pist的轴之间施加一个刚性/阻尼力。对话框设置如下。
二、求解模型并导入MATLAB/Simulink的仿真结果
1、在Analysis Model MLG_L_Drop_Test下双击Solution Set,弹出Solution Set
对话框。这里需注意将working directory设为与模型文件保存的同一目录下。
Analysis Type项设为DYNAMIC,在Solution Set对话框中点击Dynamic,设置Method Integration为MATLAB_SIM,点击Ok关闭Solution Parameters对话框中。
2、选择Compute Solution按钮进行求解,在工作目录下会生成一个名为
plantout.m的文件,这个文件包含在MATLAB/Simulink中创建S-function block的命令。
3、启动MATLAB。
4、在MATLAB命令窗口中敲入land,打开文件land.mdI,按下回车键,删除模型中现
有的plantout S-function。
5、在MATLAB命令窗口中敲入plantout,按回车键,创建一个新的plantout S-function。
6、从MATLAB的主菜单中选择Simulation Start,仿真结果将自动连接到
三、仿真模型
在Analysis Model MLG_L_Drop_Test下面选择Solution Set,点击Animate
按钮,弹出仿真对话框,点击Parameters 按钮,在采样步长Sampling
Step填0.002s,关闭player parameters设置对话框,点击Play Forward按钮
仿真模型。
四、结果后处理
1、从机构设计平台中点击运动曲线绘制按钮,会弹出如下所示的曲线绘制窗口。
2、选中Analysis Case并选择MLG_L_Drop_Test,在曲线图绘制中,X轴系统自动设为仿真时间,Y轴自己选择所需结果,这里在element name敲入l_oleo_pist,element Type项下拉选择Body,在过滤出的选项中选择L_oleo_pist:z。
3、完成曲线绘制的设置后,点击曲线创建按钮,在右边的plots manager中我们就可以看到在MLG_L_Drop_Test下面出现了一个新的分支。
4、点击新曲线展示按钮,在弹出的New Function Display对话框中选择2D Plots,点击Finish。在弹出的窗口中右击选择Select Data,弹出Select Data窗口,选择SYSTEM:TIME__l_oleo_pist:z。
曲线显示如下。
电力电子的matlab仿真实验指导书(改)
“电力电子”仿真实验指导书 MATLAB仿真实验主要是在simulink环境下的进行的。Simulink是运行在MATLAB环境下,用于建模、仿真和分析动态系统的软件包。它支持连续、离散及两者混合的线性和非线性系统。由于它具有直观、方便、灵活的特点,已经在学术界、工业界的建模及动态系统仿真领域中得到广泛的应用。 Simulink提供的图形用户界面可使用鼠标的拖放操作来创建模型。Simulink本身包含sources、sinks、Discrete、math、Nonlinear和continuous 等模块库。实验主要使用Sinks、Sources、Signals & System和Power System Blockset这四个模块库中的一些模块搭建电力电子课程中的典型电路进行仿真。在搭建成功的电路中使用scope显示模块显示仿真的波形、验证电路原理分析结果。这些典型电路包括: 1)单相半波可控整流电路(阻性负载和阻感负载) 2)单相全控桥式整流电路(阻性负载和阻感负载) 3)三相全控桥式整流电路(双窄脉冲阻性负载和双窄脉冲阻感负载) 4)降压斩波电路、升压斩波电路 5)三相半波逆变电路、三相全波逆变电路。 一、matlab、simulink基本操作 多数学生在做这个实验是时候可能是第一次使用matlab中的simulink来仿真,因此下面首先介绍一下实验中要掌握得的一些基本操作(编写试验指导书时所使用的matlab6.1版本)。若实验过程中使用matlab的版本不同这些基本操作可能会略有不同。 图0-1 matlab启动界面
matlab的启动界面如图0-1所示,点击matlab左上方快捷键就可以进入simulink程序界面(在界面右侧的Command Window中输入simulink命令回车或者在Launch Pad窗口中点击simulink子菜单中Library Browser都可以进入simulink程序界面)如图0-2所示。 + 图0-2 simulink程序界面 1.新建空白的模块编辑窗口 在simulink程序界面中点击File>New>Model(快捷键Ctrl+n),就可以新建一个空白的模型编辑窗口,然后从模块库窗口中选择合适的元件。在模块编辑窗口中绘制出要仿真的系统的整个模型(只需将所选模块库中的模块拖入模块编辑窗口即可进行电路搭建)。整个电路搭建完毕,各参数设定后,点击Start Simulation就可进行运行仿真电路。通过示波器显示实验波形。 2.对模块的基本操作 (1)调整模块大小 若要调整模块编辑窗口中模块的大小,先选中模块,模块四角出现了小方块。单击一个角上的小方块,并按住鼠标,拖拽鼠标。此时的鼠标指针改变了形状,并出现了虚线方框以显示调整后的大小。放开鼠标键,则模块的图标将按照虚线框的大小显示。
电力电子技术MATLAB仿真报告模板
《电气专业核心课综合课程设计》 题目:基于MATLAB的电力电子技术 仿真分析 学校: 院(系): 专业班级: 学生姓名: 学号: 指导教师: 目录
1.整流电路仿真………………………………………………………………………………页码 1.1单相半波可控整流系统………………………………………………………………页码 1.1.1晶闸管的仿真…………………………………………………………………页码 1.1.2单相半波可控整流电路的仿真………………………………………………页码 1.2晶闸管三相桥式整流系统的仿真…………………………………………………页码 1.3相位控制的晶闸管单相交流调压器带系统的仿真………………………………页码 2.斩波电路仿真………………………………………………………………………………页码 2.1降压斩波电路(Buck变换器)………………………………………………………页码 2.1.1可关断晶闸管(GTO)的仿真…………………………………………………页码 2.1.2 Buck变换器的仿真………………………………………………………页码 2.2升压斩波电路(Boost变换器)………………………………………………………页 码 2.2.1绝缘栅双极型晶体管(IGBT)的仿真…………………………………………页码 2.2.2 Boost变换器的仿真……………………………………………………………页码4.逆变电路仿真………………………………………………………………………………页码 4.1晶闸管三相半波有源逆变器的仿真………………………………………………页码 5.课程设计总结………………………………………………………………………………页码参考文献……………………………………………………………………………………页码 电气专业核心课综合课程设计任务书
电力电子的matlab仿真
电力电子的 MATLAB 仿真
计算机控制技术 课程设计资料
2010 年 4 月
前 言
电力电子技术综合了电子电路、电机拖动、计算机控制等多学科知识,是一门实践性和应用形 很强的课程。由于电力电子器件自身的开关非线性,给电力电子电路的分析带来了一定的复杂性和 困难,一般常用波形分析的方法来研究。仿真技术为电力电子电路的分析提供了崭新的方法。 我们在电力电子技术课程的教学中引入了仿真,对于加深学生对这门课程的理解起到了良好的 作用。掌握了仿真的方法,学生的想法可以通过仿真来验证,对培养学生的创新能力很有意义,并 且可以调动学生的积极性。实验实训是本课程的重要组成部分,学校的实验实训条件毕竟是有限的, 也受到学时的限制。而仿真实训不受时间、空间和物质条件的限制,学生可以在课外自行上机。仿 真在促进教学改革、加强学生能力培养方面起到了积极的推动作用。
目录
第一章 MATLAB 基础
1
1.1 MATLAB 介绍
1
1.2 MATLAB 的安装与启动
2
1.3 MATLAB 环境
3
第二章 MATLAB/Simulink/Power System 工具箱简介 7
2.1 Simulink 工具箱简介 7
2.2 Power System 工具箱简介 10
2.3
Simulink/Power System 的模型窗口 13
2.4
Simulink/Power System 模块的基本操作 17
第三章 电力电子电路仿真实训 21
实训一
单相半波可控整流电路仿真实训 21
实训二
单相桥式半控整流电路仿真实训 29
实训三
单相桥式全控整流电路仿真实训 35
实训四
单相桥式全控有源逆变电路仿真实训 42
实训五 单相交流调压电路仿真实训 45
实训六 降压斩波电路仿真实训 48
实训七 升压斩波电路仿真实训 51
实训八 升降压斩波电路实训 54
实训九
三相半波不可控整流电路仿真实训 57
实训十
三相半波可控整流电路仿真实训 59
实训十一
三相桥式全控整流电路仿真实训 67
实训十二
三相半波可控整流电路有源逆变电路仿真实训 72
实训十三
三相桥式有源逆变电路仿真实训 75
ProE 5.0经典教程
PTC/USER 2009 Pro/ENGINEER Wildfire 5.0 操作实训
仅供操作实训使用
请勿在本手册上做记录或者将手册带离本次培训 会,以便其他参加者使用。
PTC/USER 2009
目录
交互性建模......................................................................................................................... 3 模具件设计效率............................................................................................................... 17 钣金件设计及焊接........................................................................................................... 24 灵活装配........................................................................................................................... 38 仿真教程........................................................................................................................... 49 工程图工作流程和效率................................................................................................... 61 Pro/ENGINEER Manikin..................................................................................................... 74 公差分析........................................................................................................................... 81
Pro/ENGINEER Wildfire 操作实训
Page 1
电力电子技术MatLab仿真
本文前言 MA TLAB的简介 MATLAB是一种适用于工程应用的各领域分析设计与复杂计算的科学计算软件,由美国Mathworks公司于1984年正式推出,1988年退出3.X(DOS)版本,19992年推出4.X(Windows)版本;19997年腿5.1(Windows)版本,2000年下半年,Mathworks公司推出了他们的最新产品MATLAB6.0(R12)试用版,并于2001年初推出了正式版。随着版本的升级,内容不断扩充,功能更加强大。近几年来,Mathworks公司将推出MATLAB语言运用于系统仿真和实时运行等方面,取得了很多成绩,更扩大了它的应用前景。MATLAB已成为美国和其他发达国家大学教学和科学研究中最常见而且必不可少的工具。 MATLAB是“矩阵实验室”(Matrix Laboratory)的缩写,它是一种以矩阵运算为基础的交互式程序语言,着重针对科学计算、工程计算和绘图的需要。在MATLAB中,每个变量代表一个矩阵,可以有n*m个元素,每个元素都被看做复数摸索有的运算都对矩阵和复数有效,输入算式立即可得结果,无需编译。MATLAB强大而简易的做图功能,能根据输入数据自动确定坐标绘图,能自定义多种坐标系(极坐标系、对数坐标系等),讷讷感绘制三维坐标中的曲线和曲面,可设置不同的颜色、线形、视角等。如果数据齐全,MATLAB通常只需要一条命令即可做图,功能丰富,可扩展性强。MATLAB软件包括基本部分和专业扩展部分,基本部分包括矩阵的运算和各种变换、代数和超越方程的求解、数据处理和傅立叶变换及数值积分风,可以满足大学理工科学生的计算需要,扩展部分称为工具箱,它实际上使用MATLAB的基本语句编成的各种子程序集,用于解决某一方面的问题,或实现某一类的新算法。现在已经有控制系统、信号处理、图象处理、系统辨识、模糊集合、神经元网络及小波分析等多种工具箱,并且向公式推倒、系统仿真和实时运行等领域发展。MATLAB语言的难点是函数较多,仅基本部分就有七百多个,其中常用的有二三百个。 MATLAB在国内外的大学中,特别是数值计算应用最广的电气信息类学科中,已成为每个学生都应该掌握的工具。MATLAB大大提高了课程教学、解题作业、分析研究的效率。
电力电子技术与电力系统分析matlab仿真
电气2013级卓班电力电子技术与电力系统分析 课程实训报告 专业:电气工程及其自动化 班级: 姓名: 学号: 指导教师:
兰州交通大学自动化与电气工程学院 2016 年 1 月日
电力电子技术与电力系统分析课程实训报告 1 电力电子技术实训报告 1.1 实训题目 1.1.1电力电子技术实训题目一 一.单相半波整流 参考电力电子技术指导书中实验三负载,建立MATLAB/Simulink环境下三相半波整流电路和三相半波有源逆变电路的仿真模型。仿真参数设置如下: (1)交流电压源的参数设置和以前实验相关的参数一样。 (2)晶闸管的参数设置如下: R=0.001Ω,L =0H,V f=0.8V,R s=500Ω,C s=250e-9F on (3)负载的参数设置 RLC串联环节中的R对应R d,L对应L d,其负载根据类型不同做不同的调整。 (4)完成以下任务: ①仿真绘出电阻性负载(RLC串联负载环节中的R d= Ω,电感L d=0,C=inf,反电动势为0)下α=30°,60°,90°,120°,150°时整流电压U d,负载电流L 和晶闸管两端电压U vt1的波形。 d ②仿真绘出阻感性负载下(负载R d=Ω,电感L d为,反电动势E=0)α=30°,60°,90°,120°,150°时整流电压U d,负载电流L d和晶闸管两端电压U vt1的波形。 ③仿真绘出阻感性反电动势负载下α=90°,120°,150°时整流电压U d,负载电流L d和晶闸管两端电压U vt1的波形,注意反电动势E的极性。 (5)结合仿真结果回答以下问题: ①该三项半波可控整流电路在β=60°,90°时输出的电压有何差异?
电力电子技术MatLab仿真.
本文前言 MATLAB的简介 MATLAB是一种适用于工程应用的各领域分析设计与复杂计算的科学计算软件,由美国Mathworks公司于1984年正式推出,1988年退出3.X(DOS)版本,19992年推出4.X(Windows)版本;19997年腿5.1(Windows)版本,2000年下半年,Mathworks公司推出了他们的最新产品MATLAB6.0(R12)试用版,并于2001年初推出了正式版。随着版本的升级,内容不断扩充,功能更加强大。近几年来,Mathworks公司将推出MATLAB语言运用于系统仿真和实时运行等方面,取得了很多成绩,更扩大了它的应用前景。MATLAB已成为美国和其他发达国家大学教学和科学研究中最常见而且必不可少的工具。 MATLAB是“矩阵实验室”(Matrix Laboratory)的缩写,它是一种以矩阵运算为基础的交互式程序语言,着重针对科学计算、工程计算和绘图的需要。在MATLAB中,每个变量代表一个矩阵,可以有n*m个元素,每个元素都被看做复数摸索有的运算都对矩阵和复数有效,输入算式立即可得结果,无需编译。MATLAB强大而简易的做图功能,能根据输入数据自动确定坐标绘图,能自定义多种坐标系(极坐标系、对数坐标系等),讷讷感绘制三维坐标中的曲线和曲面,可设置不同的颜色、线形、视角等。如果数据齐全,MATLAB通常只需要一条命令即可做图,功能丰富,可扩展性强。MATLAB软件包括基本部分和专业扩展部分,基本部分包括矩阵的运算和各种变换、代数和超越方程的求解、数据处理和傅立叶变换及数值积分风,可以满足大学理工科学生的计算需要,扩展部分称为工具箱,它实际上使用MATLAB的基本语句编成的各种子程序集,用于解决某一方面的问题,或实现某一类的新算法。现在已经有控制系统、信号处理、图象处理、系统辨识、模糊集合、神经元网络及小波分析等多种工具箱,并且向公式推倒、系统仿真和实时运行等领域发展。MATLAB语言的难点是函数较多,仅基本部分就有七百多个,其中常用的有二三百个。 MATLAB在国内外的大学中,特别是数值计算应用最广的电气信息类学科中,已成为每个学生都应该掌握的工具。MATLAB大大提高了课程教学、解题作业、分析研究的效率。
proe运动仿真
proe5.0装配体运动仿真 基础与重定义主体 基础是在运动分析中被设定为不参与运动的主体。 创建新组件时,装配(或创建)的第一个元件自动成为基础。 元件使用约束连接(“元件放置”窗口中“放置”页面)与基础发生关系,则此元件也成为基础的一部份。 如果机构不能以预期的方式移动,或者因两个零件在同一主体中而不能创建连接,就可以使用“重定义主体”来确认主体之间的约束关系及删除某些约束。 进入“机构”模块后,“编辑”—>“重定义主体”进入主体重定义窗口,选定一个主体,将在窗口里显示这个主体所受到的约束(仅约束连接及“刚体”接头所用的约束)。可以选定一个约束,将其删除。如果删除所有约束,元件将被封装。、、 特殊连接:凸轮连接 凸轮连接,就是用凸轮的轮廓去控制从动件的运动规律。PROE里的凸轮连接,使用的是平面凸轮。但为了形象,创建凸轮后,都会让凸轮显示出一定的厚度(深度)。 凸轮连接只需要指定两个主体上的各一个(或一组)曲面或曲线就可以了。定义窗口里的“凸轮1”“凸轮2”分别是两个主体中任何一个,并非从动件就是“凸轮2”。 如果选择曲面,可将“自动选取”复选框勾上,这样,系统将自动把与所选曲面的邻接曲面选中,如果不用“自动选取”,需要选多个相邻面时要按住Ctrl。 如果选择曲线/边,“自动选取”是无效的。如果所选边是直边或基准曲线,则还要指定工作平面(即所定义的二维平面凸轮在哪一个平面上)。 凸轮一般是从动件沿凸轮件的表面运动,在PROE里定义凸轮时,还要确定运动的实际接触面。选取了曲面或曲线后,将会出线一个箭头,这个箭头指示出所选曲面或曲线的法向,箭头指向哪侧,也就是运动时接触点将在哪侧。如果系统指示出的方向与想定义的方向不同,可反向。 关于“启用升离”,打开这个选项,凸轮运转时,从动件可离开主动件,不使用此选项时,从动件始终与主动件接触。启用升离后才能定义“恢复系数”,即“启用升离”复选框下方的那个“e”。 因为是二维凸轮,只要确定了凸轮轮廓和工作平面,这个凸轮的形状与位置也就算定义完整了。为了形象,系统会给这个二维凸轮显示出一个厚度(即深度)。通常我们可不必去修改它,使用“自动”就可以了。也可自已定义这个显示深度,但对分析结果没有影响。 需要注意: A.所选曲面只能是单向弯曲曲面(如拉伸曲面),不能是多向弯曲曲面(如旋转出来的鼓形曲面)。 B.所选曲面或曲线中,可以有平面和直边,但应避免在两个主体上同时出现。 C.系统不会自动处理曲面(曲线)中的尖角/拐点/不连续,如果存在这样的问题,应在定义凸轮前适当处理。
matlab电力电子仿真教程
MATLAB在电力电子技术中的应用 目录 MATLAB在电力电子技术中的应用 (1) MATLAB in power electronics application (2) 目录 (4) 1绪论 (6) 1.1关于MATLAB软件 (6) 1.1.1MATLAB软件是什么 (6) 1.1.2MATLAB软件的特点和基本操作窗口 (7) 1.1.3MATLAB软件的基本操作方法 (10) 1.2电力电子技术 (12) 1.3MATLAB和电力电子技术 (13) 1.4本文完成的主要内容 (14) 2MATLAB软件在电路中的应用 (15) 2.1基本电气元件 (15) 2.1.1基本电气元件简介 (15) 2.1.2如何调用基本电器元件功能模块 (17) 2.2如何简化电路的仿真模型 (19) 2.3基本电路设计方法 (19) 2.3.1电源功能模块 (19) 2.3.2典型电路设计方法 (20) 2.4常用电路设计法 (21) 2.4.1ELEMENTS模块库 (21) 2.4.2POWER ELECTRONICS模块库 (22) 2.5MATLAB中电路的数学描述法 (22) 3电力电子变流的仿真 (25) 3.1实验的意义 (25) 3.2交流-直流变流器 (25)
3.2.1单相桥式全控整流电路仿真 (26) 3.2.2三相桥式全控整流电路仿真 (38) 3.3三相交流调压器 (53) 3.3.1无中线星形联结三相交流调压器 (53) 3.3.2支路控制三角形联结三相交流调压器 (59) 3.4交流-交流变频电路仿真 (64) 3.5矩阵式整流器的仿真 (67)
电力电子matlab风力发电仿真Wind Farm实验报告
电力电子技术仿真实验报告 学校:四川大学 学院:电气信息学院 专业:电气工程及其自动化 年级:2011级 班级:电力109班 实验内容:9MW DFIG风电场MATLAB仿真 实验小组成员: 杜泽旭:1143031345 罗恒:1143031346 何强:1143031347 蒋红亮:1143031153 陈中俊:1143031272
一、仿真平台 本次实验的仿真平台是MATLAB软件。MATLAB软件是由美国mathworks 公司发布的主要面对科学计算、可视化以及交互式程序设计的高科技计算环境。它将数值分析、矩阵计算、科学数据可视化以及非线性动态系统的建模和仿真等诸多强大功能集成在一个易于使用的视窗环境中,为科学研究、工程设计以及必须进行有效数值计算的众多科学领域提供了一种全面的解决方案,并在很大程度上摆脱了传统非交互式程序设计语言(如C、Fortran)的编辑模式,代表了当今国际科学计算软件的先进水平。本次实验所用的MATLAB软件版本为MATLAB 7.11.0(R2010b)。 二、仿真模型 在本次试验中我们所用是MATLAB中的自带的示例中的Sim Power system 中的由风力涡轮机驱动使用双馈异步式风力发电机发电的9MW风力发电系统,这是一个已经搭建好的模块我们只需用在以上基础做一定的参数设定就可以得到我们所想要的仿真模型。操作步骤如下所示:
仿真模型原理图 三、实验要求 1)系统自带的仿真模块中,说明系统运行工况和风机运行情况(电压、电流、转速等); 2)修改仿真模型,将系统电压改为风机输出670V,升压至35kV,经30km线路输送后并入110kV电网。要求110kV电网的短路容量为3000MV A。然后说明系统运行工况和风机运行情况(电压、电流、转速等),并与1)对比;3)修改风速至12m/s,运行仿真并观察结果。
proe小球运动教程
1.1机构模块简介 在进行机械设计时,建立模型后设计者往往需要通过虚拟的手段,在电脑上模拟所设计
的机构,来达到在虚拟的环境中模拟现实机构运动的目的。对于提高设计效率降低成本有很大的作用。Pro/ engineer中“机构”模块是专门用来进行运动仿真和动态分析的模块。PROE的运动仿真与动态分析功能集成在“机构”模块中,包括Mechanism design(机械设计)和Mechanism dynamics(机械动态)两个方面的分析功能。 使用“机械设计”分析功能相当于进行机械运动仿真,使用“机械设计”分析功能来创建某种机构,定义特定运动副,创建能使其运动起来的伺服电动机,来实现机构的运动模拟。并可以观察并记录分析,可以测量诸如位置、速度、加速度等运动特征,可以通过图形直观的显示这些测量量。也可创建轨迹曲线和运动包络,用物理方法描述运动。 使用“机械动态”分析功能可在机构上定义重力,力和力矩,弹簧,阻尼等等特征。可以设置机构的材料,密度等特征,使其更加接近现实中的结构,到达真实的模拟现实的目的。如果单纯的研究机构的运动,而不涉及质量,重力等参数,只需要使用“机械设计”分析功能即可,即进行运动分析,如果还需要更进一步分析机构受重力,外界输入的力和力矩,阻尼等等的影响,则必须使用“机械设计”来进行静态分析,动态分析等等。 1.2总体界面及使用环境 在装配环境下定义机构的连接方式后,单击菜单栏菜单“应用程序”→“机构”,如图1-1所示。系统进入机构模块环境,呈现图1-2所示的机构模块主界面:菜单栏增加如图1-3所示的“机构”下拉菜单,模型树增加了如图1-4所示“机构”一项内容,窗口右边出现如图1-5所示的工具栏图标。下拉菜单的每一个选项与工具栏每一个图标相对应。用户既可以通过菜单选择进行相关操作。也可以直接点击快捷工具栏图标进行操作。 图1-1 由装配环境进入机构环境图
电力电子的_MATLAB_仿真
电力电子的MATLAB 仿真
目录 第一章MATLA B基础?????????????????????????????1 1.1 MATLA B介绍?????????????????????????????1 1.2 MATLA B的安装与启动?????????????????????????2 1.3 MATLA B环境?????????????????????????????3 第二章MATLA B/Simulink/Power System工具箱简介????????????????7 2.1 Simulink工具箱简介???????????????????????????7 2.2Power System 工具箱简介???????????????????????10 2.3Simulink/Power System的模型窗口????????????????????13 2.4 Simulink/Power System模块的基本操作???????????????????17
第1章MATLAB基础 1.1 MATLAB介绍 MATLAB是一种科学计算软件。MATLA B是Matrix Laboratory(矩阵实验室)的缩写,这是一种 以矩阵为基础的交互式程序计算语言。早期的MATLA B主要用于解决科学和工程的复杂数学计算问 题。由于它使用方便、输入便捷、运算高效、适应科技人员的思维方式,并且有绘图功能,有用户 自行扩展的空间,因此受到用户的欢迎,使它成为在科技界广为使用的软件,也是国内外高校教学 和科学研究的常用软件。 MATLAB由美国Mathworks公司于1984年开始推出,历经升级,到2001年已经有了6.0版,现在MATLA B 6.1、6.5、7.0版都已相继面世。早期的MATLAB在DOS环境下运行,1990年推出了W indows版本。1993年,Mathworks公司又推出了MATLAB的微机版,充分支持在 MicrosoftWindows界面下的编程,它的功能越来越强大,在科技和工程界广为传播,是各种科学计 算软件中使用频率最高的软件。 1993年出现了SIMULINK,这是基于框图的仿真平台,SIMULINK挂接在MATLA B环境上, 以MATLA B的强大计算功能为基础,以直观的模块框图进行仿真和计算。SIMULINK提供了各种 仿真工具,尤其是它不断扩展的、内容丰富的模块库,为系统的仿真提供了极大便利。在SIMULINK 平台上,拖拉和连接典型模块就可以绘制仿真对象的模型框图,并对模型进行仿真。在SIMULINK 平台上,仿真模型的可读性很强,这就避免了在MATLAB窗口使用MATLAB命令和函数仿真时, 需要熟悉记忆大量M函数的麻烦,对广大工程技术人员来说,这无疑是最好的福音。现在的MATLAB 都同时捆绑了SIMULINK,SIMULINK的版本也在不断地升级,从1993年的MATLAB 4.0/SIMULINK 1.0版到2001年的MATLA B 6.1/SIMULINK 4.1版,2002年即推出了MATLAB 6.5 /SIMULINK 5.0版。MATLAB已经不再是单纯的"矩阵实验室"了,它已经成为一个高级计算 和仿真平台。 SIMULINK原本是为控制系统的仿真而建立的工具箱,在使用中易编程、易拓展,并且可以解 决MATLAB不易解决的非线性、变系数等问题。它能支持连续系统和离散系统的仿真,支持连续离 散混合系统的仿真,也支持线性和非线性系统的仿真,并且支持多种采样频率(Multirate)系统的仿真, 也就是不同的系统能以不同的采样频率组合,这样就可以仿真较大、较复杂的系统。因此,各科学 领域根据自己的仿真需要,以MATLAB为基础,开发了大量的专用仿真程序,并把这些程序以模块 的形式都放人SIMULINK中,形成了模块库。SIMULINK的模块库实际上就是用MATLA B基本语 句编写的子程序集。现在SIMULINK模块库有三级树状的子目录,在一级目录下就包含了SIMULINK 最早开发的数学计算工具箱、控制系统工具箱的内容,之后开发的信号处理工具箱(DSPBlocks)、通 信系统工具箱(Comm)等也并行列入模块库的一级子目录,逐级打开模块库浏览器 (SIMULINKLibraryBrowser)的目录,就可以看到这些模块。 从SIMULINK4.1版开始,有了电力系统模块库(Power System Blockset),该模块库主要由加拿大HydroQuebec和TECSIMInternational公司共同开发。在SIMULINK环境下用电力系统模块 库的模块,可以方便地进行RLC电路、电力电子电路、电机控制系统和电力系统的仿真。本书中电
proe运动仿真经典教程!47
proe运动仿真经典教程!47 ProE野火运动仿真经典教程 关键词:PROE 仿真运动分析重复组件分析连接回放运动包络轨迹曲线版权:原创文章,转载请注明出处 机构仿真是PROE的功能模块之一。PROE能做的仿真内容还算比较好,不过用好的兄弟不多。当然真正专做仿真分析的兄弟,估计都用Ansys去了。但是,Ansys研究起来可比PROE麻烦多了。所以,学会PROE的仿真,在很多时候还是有用的。坛子里关于仿真的教程也有过一些,但很多都是动画,或实例。偶再发放一份学习笔记,并整理一下,当个基础教程吧。 希望能对学习仿真的兄弟有所帮助。 术语 创建机构前,应熟悉下列术语在PROE中的定义: 主体 (Body) - 一个元件或彼此无相对运动的一组元件,主体内DOF=0。 连接 (Connections) - 定义并约束相对运动的主体之间的关系。自由度(Degrees of Freedom) - 允许的机械系统运动。连接的作用是约束主体之间的相对 运动,减少系统可能的总自由度。 拖动 (Dragging) - 在屏幕上用鼠标拾取并移动机构。 动态 (Dynamics) - 研究机构在受力后的运动。 执行电动机 (Force Motor) - 作用于旋转轴或平移轴上(引起运动)的力。 齿轮副连接 (Gear Pair Connection) - 应用到两连接轴的速度约束。 基础 (Ground) - 不移动的主体。其它主体相对于基础运动。 接头 (Joints) - 特定的连接类型(例如销钉接头、滑块接头和球接头)。
运动 (Kinematics) - 研究机构的运动,而不考虑移动机构所需的力。 环连接 (Loop Connection) - 添加到运动环中的最后一个连接。 运动 (Motion) - 主体受电动机或负荷作用时的移动方式。放置约束(Placement Constraint) - 组件中放置元件并限制该元件在组件中运动的图元。 回放 (Playback) - 记录并重放分析运行的结果。 伺服电动机 (Servo Motor) - 定义一个主体相对于另一个主体运动的方式。可在接头或几 何图元上放置电动机,并可指定主体间的位置、速度或加速度运动。 LCS - 与主体相关的局部坐标系。LCS 是与主体中定义的第一个零件相关的缺省坐标系。 UCS - 用户坐标系。 WCS - 全局坐标系。组件的全局坐标系,它包括用于组件及该组件内所有主体的全局坐标系。 运动分析的定义 在满足伺服电动机轮廓和接头连接、凸轮从动机构、槽从动机构或齿轮副连接的要求的情况下,模拟机构的运动。运动分析不考虑受力,它模拟除质量和力之外的运动的所有方面。因此,运动分析不能使用执行电动机,也不必为机构指定质量属性。运动分析忽略模型中的所有动态图元,如弹簧、阻尼器、重力、力/力矩以及执行电动机等,所有动态图元都不影响 运动分析结果。 如果伺服电动机具有不连续轮廓,在运行运动分析前软件会尝试使其轮廓连续,如果不能使 其轮廓连续,则此伺服电机将不能用于分析。 使用运动分析可获得以下信息: 几何图元和连接的位置、速度以及加速度
基于MATLAB的电力电子技术课程设计报告
《电力电子技术》 课程设计报告 题目:基于MATLAB的电力电子技术 仿真分析 院(系):机电与自动化学院 专业班级:电气工程及其自动化11XX 学生姓名:XXX 学号:2011113XXXX 指导教师:XXX 2014年1月13日至2014年1月17日 华中科技大学武昌分校
电力电子技术课程设计任务书
目录 第1章 MATLAB软件及仿真集成环境Simulink简介 (1) 1.1 MATLAB及Simulink简介 (1) 1.2 Simulink系统的操作步骤 (1) 1.3 电气元件模块库 (2) 第2章电力电子技术仿真分析 (3) 2.1单相半波可控整流电路仿真 (3) 2.1.1 单相半波可控整流电路基本原理 (3) 2.1.2 电阻负载时仿真分析 (4) 2.1.3 阻感负载仿真分析 (5) 2.2 晶闸管三相桥式整流电路的仿真 (7) 2.2.1电路图及工作原理 (7) 2.2.2 仿真模型及波形 (8) 2.3 Boost变换器的仿真 (11) 2.3.1电路图及工作原理 (11) 2.3.2 仿真模型及波形 (11) 2.4 相位控制的晶闸管单相交流调压器系统的仿真 (12) 2.4.1电路图及工作原理 (12) 2.4.2仿真模型及波形 (13) 第3章总结 (15) 课程设计成绩评定表 (16)
第1章MATLAB软件及仿真集成环境Simulink简介 1.1 MATLAB及Simulink简介 MATLAB软件是美国MathWorks公司在20世纪80年代中期推出的高性能数值计算软件,经过近30年的开发和更新换代,该软件已成为合适多学科功能十分强大的软件系统,成为线性代数、数字信号处理、自动控制系统分析、动态系统仿真等方面的强大工具。MATLAB中含有一个仿真集成环境Simulink,其主要功能是实现各种动态系统建模、仿真与分析。在MATLAB启动后的系统界面中的命令窗口输入”SIMULINK”指令就可以启动SIMULINK仿真环境。启动SIMULINK后就进入了浏览器既模版库,在图中左侧为以目录结构显示的17类模版库名称(因软件版本的不同,库的数量及其他细节可能不同),选中模版库后,即会在右侧窗口出现该模型库中的各种元件或子库。 Simulink支持连续、离散系统以及连续离散混合系统、非线性系统等多种类型系统的仿真分析,本书中将主要介绍和电力电子电路仿真有关的元件模式及仿真方法。对于电力电子电路及系统的仿真,除需使用Simulink中的基本模板外,用到的主要元件模型集中在电气系统仿真库SimPowerSystem中,该模型库提供了电气系统中常用元件的图形化的图形化元件模型,包括无源元件、电力电子器件、触发器、电机和测量元件等。图形的元件模型使使用者可以快速并且形象地构建所需仿真系统结构。 1.2 Simulink系统的操作步骤 在Simulink系统中,执行菜单“File”下“New”、“Model”命令即可产生一个新的仿真模型编辑窗口,在窗口中可以采用形象的图形编辑的方法建立仿真对象、编辑元件及系统相关参数,进而完成电路及系统的仿真系统。具体步骤为:建立一个新的仿真模型编辑窗口后,首先从Simulink模块中选择所仿真电路或系统所需要的元件或模块搭建系统,方法为在Simulink模块库中所选元件位置按住鼠标左键将元件拖拽至所建编辑窗口的合适位置,不断重复该过程直至所有元件均放置完毕。 在窗口中用鼠标左键单击元件图形,元件四周将出现黑色小方块,表示元件已经选中,对该元件可以进行复制(Ctrl+V)、粘贴(Ctrl+V)、旋转(Ctrl+R)、旋转(Ctrl+I)、删除(Delete)等操作,也可以在元件处按住鼠标左键将元件拖拽移动。 需要改变元件大小时可以选定该元件,将鼠标移至元件四周的黑色小方块,待鼠标指针变为箭头形状时按住鼠标左键将元件拖拽至合适尺寸。 需要改变元件参数,可以在该元件处双击鼠标左键,即可弹出该元件的参数
PROE运动仿真分析基础教程
机构仿真之运动分析基础教程 机构仿真是PROE的功能模块之一。PROE能做的仿真容还算比较好,不过用好的兄弟不多。当然真正专做仿真分析的兄弟,估计都用Ansys去了。但是,Ansys研究起来可比PROE麻烦多了。所以,学会PROE的仿真,在很多时候还是有用的。我再发一份学习笔记,并整理一下,当个基础教程吧。希望能对学习仿真的兄弟有所帮助。 术语 创建机构前,应熟悉下列术语在PROE中的定义: 主体(Body) - 一个元件或彼此无相对运动的一组元件,主体DOF=0。 连接(Connections) - 定义并约束相对运动的主体之间的关系。 自由度(Degrees of Freedom) - 允许的机械系统运动。连接的作用是约束主体之间的相对运动,减少系统可能的总自由度。 拖动(Dragging) - 在屏幕上用鼠标拾取并移动机构。 动态(Dynamics) - 研究机构在受力后的运动。 执行电动机(Force Motor) - 作用于旋转轴或平移轴上(引起运动)的力。 齿轮副连接(Gear Pair Connection) - 应用到两连接轴的速度约束。 基础(Ground) - 不移动的主体。其它主体相对于基础运动。 机构(Joints) - 特定的连接类型(例如销钉机构、滑块机构和球机构)。 运动(Kinematics) - 研究机构的运动,而不考虑移动机构所需的力。 环连接(Loop Connection) - 添加到运动环中的最后一个连接。 运动(Motion) - 主体受电动机或负荷作用时的移动方式。 放置约束(Placement Constraint) - 组件中放置元件并限制该元件在组件中运动的图元。 回放(Playback) - 记录并重放分析运行的结果。 伺服电动机(Servo Motor) - 定义一个主体相对于另一个主体运动的方式。可在机构或几何图元上放置电动机,并可指定主体间的位置、速度或加速度运动。 LCS - 与主体相关的局部坐标系。LCS 是与主体中定义的第一个零件相关的缺省坐标系。 UCS - 用户坐标系。 WCS - 全局坐标系。组件的全局坐标系,它包括用于组件及该组件所有主体的全局坐标系。 运动分析的定义 在满足伺服电动机轮廓和机构连接、凸轮从动机构、槽从动机构或齿轮副连接的要求的情况下,模拟机构的运动。运动分析不考虑受力,它模拟除质量和力之外的运动的所有方面。因此,运动分析不能使用执行电动机,也不必为机构指定质量属性。运动分析忽略模型中的所有动态图元,如弹簧、阻尼器、重力、力/力矩以及执行电动机等,所有动态图元都不影响运动分析结果。 如果伺服电动机具有不连续轮廓,在运行运动分析前软件会尝试使其轮廓连续,如果不能使其轮廓连续,则此伺服电机将不能用于分析。 使用运动分析可获得以下信息: 几何图元和连接的位置、速度以及加速度 元件间的干涉 机构运动的轨迹曲线 作为Pro/ENGINEER 零件捕获机构运动的运动包络 运动分析工作流程 创建模型:定义主体,生成连接,定义连接轴设置,生成特殊连接 检查模型:拖动组件,检验所定义的连接是否能产生预期的运动
电力电子MatLab仿真
前言 MATLAB的简介 MATLAB是一种适用于工程应用的各领域分析设计与复杂计算的科学计算软件,由美国Mathworks公司于1984年正式推出,1988年退出3.X(DOS)版本,19992年推出4.X(Windows)版本;19997年腿5.1(Windows)版本,2000年下半年,Mathworks 公司推出了他们的最新产品MATLAB6.0(R12)试用版,并于2001年初推出了正式版。随着版本的升级,内容不断扩充,功能更加强大。近几年来,Mathworks公司将推出MATLAB语言运用于系统仿真和实时运行等方面,取得了很多成绩,更扩大了它的应用前景。MATLAB已成为美国和其他发达国家大学教学和科学研究中最常见而且必不可少的工具。 MATLAB是“矩阵实验室”(Matrix Laboratory)的缩写,它是一种以矩阵运算为基础的交互式程序语言,着重针对科学计算、工程计算和绘图的需要。在MATLAB中,每个变量代表一个矩阵,可以有n*m个元素,每个元素都被看做复数摸索有的运算都对矩阵和复数有效,输入算式立即可得结果,无需编译。MATLAB强大而简易的做图功能,能根据输入数据自动确定坐标绘图,能自定义多种坐标系(极坐标系、对数坐标系等),讷讷感绘制三维坐标中的曲线和曲面,可设置不同的颜色、线形、视角等。如果数据齐全,MATLAB通常只需要一条命令即可做图,功能丰富,可扩展性强。MATLAB软件包括基本部分和专业扩展部分,基本部分包括矩阵的运算和各种变换、代数和超越方程的求解、数据处理和傅立叶变换及数值积分风,可以满足大学理工科学生的计算需要,扩展部分称为工具箱,它实际上使用MATLAB的基本语句编成的各种子程序集,用于解决某一方面的问题,或实现某一类的新算法。现在已经有控制系统、信号处理、图象处理、系统辨识、模糊集合、神经元网络及小波分析等多种工具箱,并且向公式推倒、系统仿真和实时运行等领域发展。MATLAB语言的难点是函数较多,仅基本部分就有七百多个,其中常用的有二三百个。 MATLAB在国内外的大学中,特别是数值计算应用最广的电气信息类学科中,已成为每个学生都应该掌握的工具。MATLAB大大提高了课程教学、解题作业、分析研究的效率。
运用MatLAB仿真电力电子仿真
电力电子学仿真 一、仿真目的 通过MatLAB中的simulink仿真,可以让各种整流电路在计算机中模拟出来。通过实验,可以更好地理解整流电路的工作原理。 二、仿真内容 在simulink中建立单相桥式全波可控整流电路及三相桥式全波可控整流电路,进行仿真。 1单相桥式全控整流电路 打开新建模型窗口,将所需元件模块从 模块库中拖入新建模型窗口,设定有关参数后将各模块连接组成仿真模型,如图1所示。 其中: 电源电压设定为100V 有效值,频率为50Hz 。 触发脉冲“P ulse Generator1”和“Pulse Generator4”的控制角设置相同。 “Pulse Generator2 ”和“Pulse Generator3”的控制角设置相同。 图1单相桥式可控整流电路 图2、图3为图1所示单相桥式全控整流电路在触发角为0°和60°的仿真波形。图中
通过流过晶闸管VT1的电流Iak(A)波形,可清楚地看出电流换相过程。通过图中晶闸管A K 之间的电压Uak(V)波形,晶闸管在0°或60°承受正向电压,导通180°,其余的时间承受反向电压。输出负载电流Id(A)和输出负载电压V d(V)的波形,可清楚地看出电流由零增加到稳态值的过程,电流大小对晶闸管换流过程的影响。改变各个参数设定再进行仿真就可得到不同参数时的仿真波形。 图 2 单相整流电路的仿真波形(0°) 图 3 单相整流电路的仿真波形(60°)
2 三相桥式全控整流电路 图4 三相桥式可控整流电路 图4中三相交流电源A、B、C 设定为220V,50Hz,相位互差120° 三相可控整流桥触发脉冲产生模块设定为双窄脉冲方式,脉冲宽度为10°;建立输出 其中 电压V,输出电流 I,晶闸管1、2、3 的电压及共阴极组3个晶闸管电流检测显示模块, 晶闸管1、2、3 的电压及共阴极组3个晶闸管的电流用两多用表连接到示波器上。 图5、图6 为图4 所示三相桥式全控整流电路在触发角为0°和60°的仿真波形。图5、图6中通过共阴极组三个晶闸管的电流的波形,可清楚地看出电流换相过程;通过晶闸管1,2,3 的电压波形,可清楚地看出电压波形形状相同,只是在坐标轴上平移了60°;通过输出电流 Id(A)和输出电压 Vd(V)的波形,也可清楚地看出电流由零增加到稳态值的过程,电流大小对晶闸管换流过程的影响。 图5 三相整流电路的仿真波形(0°)