计算机视觉实验指导书
计算机实验指导书
编写:郭曙光
西安邮电学院自动化学院智能科学与技术专业
2010年5月5号
实验一几何投影、游程编码
一、实验目的与要求:
目的:通过本次实验,学生可以掌握图像几何投影、游程编码的方法。
要求:上机运行,调试通过。
二、实验设备:
计算机、Matlab软件、VC++或C语言软件
三、实验内容:
(1)几何投影:对一幅简单二值图像的水平、垂直及对角线的投影。
(2)游程编码:对一幅简单二值图像进行游程编码。
四、实验原理:
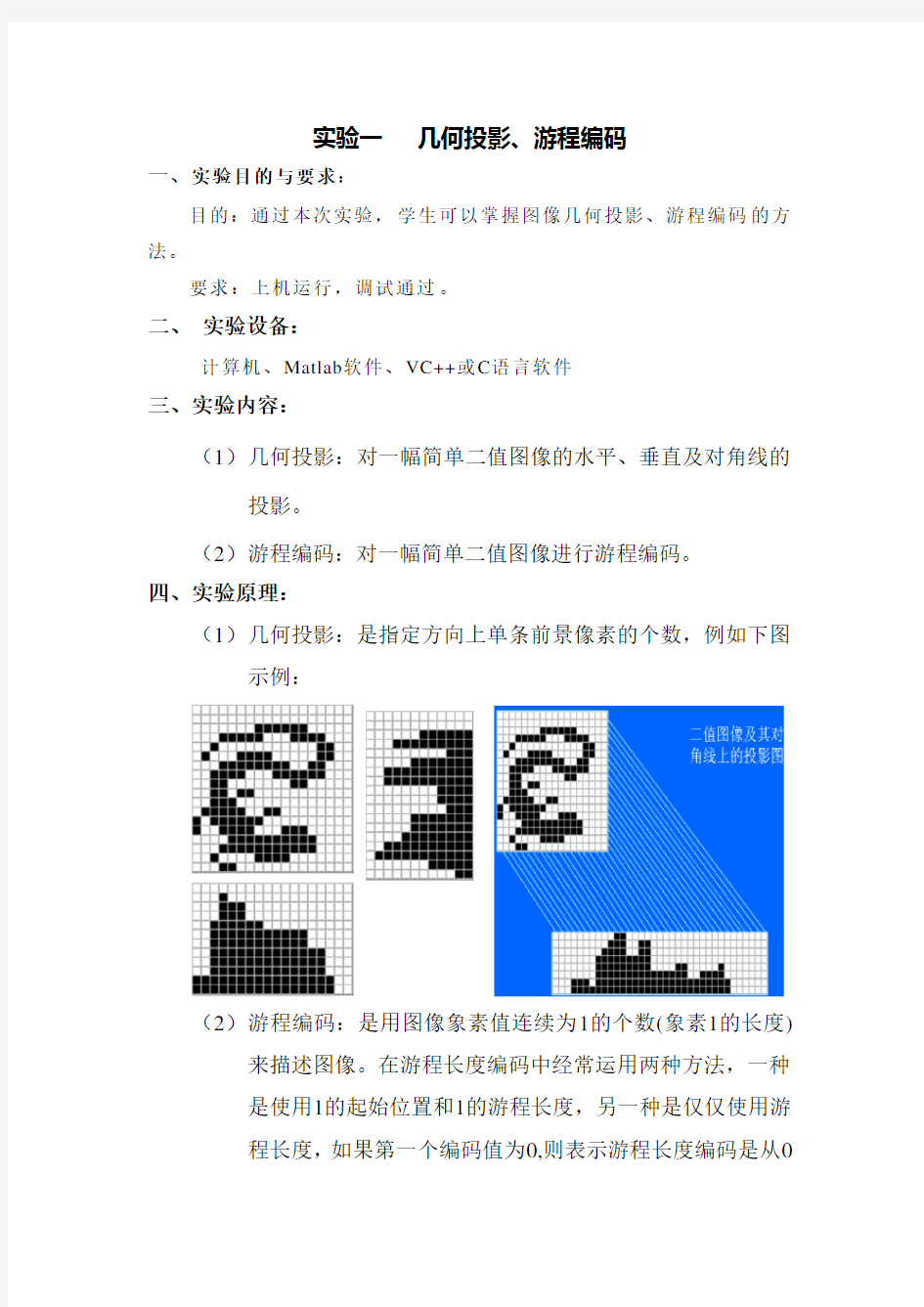
(1)几何投影:是指定方向上单条前景像素的个数,例如下图示例:
(2)游程编码:是用图像象素值连续为1的个数(象素1的长度)来描述图像。在游程长度编码中经常运用两种方法,一种
是使用1的起始位置和1的游程长度,另一种是仅仅使用游
程长度,如果第一个编码值为0,则表示游程长度编码是从0
象素的长度开始,如图所示:
1的游程:第一行(2,2)(6,3)(13,6)(20,1)
第二行(4,6)(11,10)
第三行(1,5 )(11,1)(17,4)
1和0的游程长度:第一行0,1, 2,2,3,4,6,1,1
第二行0,3,6,1,10
第三行1, 5,5,1,5,4
五、实验报告内容
(1)叙述实验过程,列出代码及代码简要说明;
(2)提交实验的原始图像和结果数据及图像。
(3)给出方法用途及结论的简要分析
实验二形态算子
一、实验目的与要求
目的:学习常见的数学形态学运算基本方法,了解腐蚀、膨胀、开运算、闭运算取得的效果,培养处理实际图像的能力。
要求:上机运行,调试通过。
二、实验设备:
计算机、Matlab软件、VC++或C语言软件
三、实验内容:
利用VC++/C或MatLab工具箱中关于数学形态学运算的函数,对二值图像进行膨胀、腐蚀和开运算、闭运算处理。
四、实验原理:
膨胀:
腐蚀:
开运算:
闭运算:
五、实验报告内容
(1)描述实验的基本步骤,用数据和图片给出各个步骤中取得的实验结果,并进行必要的讨论,必须包括原始图像及其计算/处理后的图像。
(2)结合实验内容,评价腐蚀、膨胀以及开运算、闭运算的效果,并说明它们各自适用条件。
实验三边缘检测
一、实验目的与要求
目的:熟悉采用Roberts算子、Sobel算子、Prewitt算子、Lap lacian算子和LOG 算子检测数字图像的边缘。
要求:上机运行,调试通过。
二、实验设备:
计算机、Matlab软件、VC++或C语言软件
三、实验内容
利用VC++/C或MatLab中关于边缘检测的函数,分别采用Roberts算子、Sobel算子、P rewitt算子、Lap lacian算子和LOG算子检测数字图像的边缘。
四、实验原理
两个具有不同灰度值的相邻区域之间总存在边缘,边缘是灰度值不连续的结果,这种不连续性通常可以利用求导数的方法方便地检测到。常用的边缘检测算子有Roberts算子、Sobel算子、Prewitt算子、LOG算子和Lap lacian算子。
Roberts算子是一种利用局部差分算子寻找边缘的算子,其模板如图:
Sobel算子的两个卷积计算核如图:
Prewitt算子的两个卷积计算核如图:
LOG算子=高斯滤波+拉普拉斯边缘检测。
Lap lacian算子是二阶导数的二维等效式,卷积核如图:
五、实验报告内容
(1)描述实验的基本步骤,给出各个算子取得的实验。
(2)结合实验内容,简述各个算子的效果、特点和适用范围。
实验四边缘检测
一、实验目的与要求
目的:加深对Canny边缘检测的原理的理解。
要求:上机运行,调试通过。
二、实验设备:
计算机、Matlab软件、VC++或C语言软件
三、实验内容
用Matlab语言(或C语言),编写Canny边缘检测器的Matlab(或C语言)函数;利用上述函数,对一副图像进行边缘检测;利用Matlab自带的Canny边缘检测函数对同一副图像进行边缘检测;比较上述两个结果。
四、实验步骤
步1. 图像与高斯平滑滤波器卷积:
步2. 使用一阶有限差分计算偏导数阵列P与Q:
步3. 计算梯度幅值与方向角:
步4. 非极大值抑制(NMS ):
去掉幅值局部变化非极大的点.
* 将梯度角离散为圆周的四个扇区之一,以便用3×3的窗口作抑制运算
* 方向角离散化:
* 抑制,得到新幅值图:
步5. 阈值化
取高低两个阈值作用于幅值图N[i,j],得到两个边缘图:高阈值和低阈值边缘图。连接高阈值边缘图,出现断点时,在低阈值边缘图中的8邻点域搜寻边缘点。
五、实验报告内容
(1)描述实验的基本步骤,给出实验程序代码及必要说明。
(2)结合实验内容,给出实验结果的分析和总结。
电视摄像实验指导书
《电视摄像》实验指导书 专业班级:广播电视新闻学 2008年9月 目录 实验一摄像的准备和基本操作 (2) 实验二机位与画面造型特点 (3) 实验三电视画面的取景与构图 (5) 实验四固定拍摄与画面造型 (6) 实验五运动拍摄与画面造型 (7) 实验六摄像时的声音拾取 (9) 实验七场面调度与轴线原则 (10) 实验八电视作品拍摄 (11)
实验一摄像的准备和基本操作 (2学时) 一、实验目的 1.了解摄像机使用的注意事项。 2.了解电视摄像机的基本结构与组成。 3.掌握摄像机的操作规程、调整与操作方法。 4.了解三脚架的结构与操作方法。 5.熟练掌握手持与固定执机方式。 二、实验设备和仪器 专业数字摄像机(HVR-V1C)、配用电池、三角架、监视器、白纸1张 三、实验内容及要求 1.实验内容: (1)摄像机使用的注意事项。 (2)摄像机的构成,各功能按钮的功能与使用。 (3)摄像机的操作步骤。 (4)摄像机的执机方式。 2.实验要求:本次实验分组进行;每组成员4-5人。 四、实验原理及步骤 1.实验原理 学习电视摄像,首先要从学技术开始,即要学会如何操作摄像机。摄像机是精密的电子仪器设备,在使用的过程中,要按照一定的规程和步骤进行使用,要注意一些使用事项,要了解摄像机的结构,以正确的姿势和操作步骤使用摄像机进行电视画面的拍摄。 2.步骤 (1)介绍摄像机使用的注意事项。 (2)熟悉专业摄像机的构成、开关按钮,了解其功用及使用方法。 (3)摄像机的操作、调整步骤与方法。 (4)熟悉三脚架的结构与操作方法。 (5)练习手持、肩扛执机方式,掌握执机要领。 (6)练习固定执机方式,掌握执机要领。 五、使用注意事项 1.摄像机是精密贵重的设备,请在使用前认真学习摄像机的使用注意事项。 2.摄像机及其附件设备,如果不会使用或者没学好,都不能乱动,需要在老师的指导下使用。
电脑DIY实验指导书
电脑DIY实验指导书 《电脑DIY》实验指导书 实验一了解计算机的组成3-13 一、实验目的 1、观察计算机系统的组成; 2、通过观察了解计算机系统中各个部件的连接方法; 3、了解各部件在系统中的作用。 二、实验前的准备工作 认真阅读本实验内容,准备打开主机箱的工具并按要求准备做好记录。 三、实验指导 在实验过程中要注意观察,并做好观察记录。 四、实验内容 1、观察系统外部设备的连接状况,记录各外设的名称、型号和与主机连接点情况; 2、在教师的指导下将外设去掉,用准备好的工具将主机箱打开; 3、观察主机的结构,记录主机箱内包含的部件的名称、规格等,如图所示:
电脑DIY 实验指导书 4、了解各部件的作用,看清楚部件的安装位置; 5、将主机箱安装好,并把外设连接好; 6、整理好使用过的用品,实验结束。 五、实验报告要求 1、将在实验过程中观察到的部件或设备按顺序记录在实验报告单上; 2、将你认为没有看明白的部分写出来。 这一次实验认识了计算机的组成,了解了cpu 、主板、内存的分类,认识了主板的南北桥芯片的作用和位置,知道了在以后购买时候应当注意的内容,知道如何选择硬件。了解了各个部位的主要硬件指标。
电脑DIY实验指导书 实验二计算机硬件的组装3-24 一、实验目的 1、在识别各个部件和板卡的基础上,将它们组装在一起; 2、通过对计算机系统的组装,进一步熟悉各部件的功能; 3、掌握安装和拆卸计算机部件的方法与注意事项。 二、实验前的准备工作 准备好必要的工具,认真阅读各部件的使用说明书,并按要求准备做好记录。 三、实验指导 在实验过程中要按安装步骤进行安装,找准各部件的安装位置,注意在拆装的过程中要用力均匀,防止损坏设备。 四、实验内容 1、按要求做好准备工作; 2、可将主板放置在绝缘泡沫板上; 3、将CPU、内存条和CPU风扇等安装在主板上; 4、将主板装入主机箱,拧紧主板的固定螺丝; 5、把电源固定在机箱的相应位置,并接好主板电源线; 6、安装显卡、声卡等内置板卡,并设置好主板跳线; 7、安装好硬盘、软驱和光驱等部件; 8、检查并确认安装正确无误; 9、连接好显示器、键盘和鼠标后可开机试验; 10、能正常启动后,请关机、断电并按相反顺序将各部件拆卸开放回原来位置。
测试技术实验指导书及实验报告2006级用汇总
矿压测试技术实验指导书 学号: 班级: 姓名: 安徽理工大学 能源与安全学院采矿工程实验室
实验一常用矿山压力仪器原理及使用方法 第一部分观测岩层移动的部分仪器 ☆深基点钻孔多点位移计 一、结构简介 深基点钻孔多点位移计是监测巷道在掘进和受采动影响的整个服务期间,围岩内部变形随时间变化情况的一种仪器。 深基点钻孔多点位移包括孔内固定装置、孔中连接钢丝绳、孔口测读装置组成。每套位移计内有5~6个测点。其结构及其安装如图1所示。 二、安装方法 1.在巷道两帮及顶板各钻出φ32的钻孔。 2.将带有连接钢丝绳的孔内固定装置,由远及近分别用安装圆管将其推至所要求的深度。(每个钻孔布置5~6个测点,分别为;6m、5m、4m、3m、2m、lm或12m、10m、8m、6m、4m、2m)。 3.将孔口测读装置,用水泥药圈或木条固定在孔口。 4。拉紧每个测点的钢丝绳,将孔口测读装置上的测尺推至l00mm左右的位置后,由螺丝将钢丝绳与测尺固定在一起。 三、测试方法 安装后先读出每个测点的初读数,以后每次读得的数值与初读数之差,即为测点的位移值。当读数将到零刻度时,松开螺丝,使测尺再回到l00mm左右的位置,重新读出初读数。 ☆顶板离层指示仪 一、结构简介: 顶板离层指示仪是监测顶板锚杆范围内及锚固范围外离层值大小的一种监测仪器,在顶板钻孔中布置两个测点,一个在围岩深部稳定处,一个在锚杆端部围岩中。离层值就是围岩中两测点之间以及锚杆端部围岩与巷道顶板表面间的相对位移值。顶板离层指示仪由孔内固定装置、测量钢丝绳及孔口显示装置组成如图1所示。
二、安装方法: 1.在巷道顶板钻出φ32的钻孔,孔深由要求而定。 2.将带有长钢丝绳的孔内固定装置用安装杆推到所要求的位置;抽出安装杆后再将带有短钢丝绳的孔内固定装置推到所要求的位置。 3.将孔口显示装置用木条固定在孔口(在显示装置与钻孔间要留有钢丝绳运动的间隙)。 4.将钢丝绳拉紧后,用螺丝将其分别与孔口显示装置中的圆管相连接,且使其显示读数超过零刻度线。 三、测读方法: 孔口测读装置上所显示的颜色,反映出顶板离层的范围及所处状态,显示数值表示顶板的离层量。☆DY—82型顶板动态仪 一、用途 DY-82型顶板动态仪是一种机械式高灵敏位移计。用于监测顶底板移近量、移近速度,进行采场“初次来压”和“周期来压”的预报,探测超前支撑压力高 峰位置,监测顶板活动及其它相对位移的测量。 二、技术特征 (1)灵敏度(mm) 0.01 (2)精度(%) 粗读±1,微读±2.5 (3)量程(mm) 0~200 (4)使用高度(mm) 1000~3000 三、原理、结构 其结构和安装见图。仪器的核心部件是齿条6、指针8 以及与指针相连的齿轮、微读数刻线盘9、齿条下端带有读 数横刻线的游标和粗读数刻度管11。 当动态仪安装在顶底板之间时,依靠压力弹簧7产生的 弹力而站立。安好后记下读数(初读数)并由手表读出时间。 粗读数由游标10的横刻线在刻度管11上的位置读出,每小 格2毫米,每大格(标有“1”、“22'’等)为10毫米,微读数 由指针8在刻线盘9的位置读出,每小格为0.01毫米(共200 小格,对应2毫米)。粗读数加微读数即为此时刻的读数。当 顶底板移近时,通过压杆3压缩压力弹簧7,推动齿条6下 移,带动齿轮,齿轮带动指针8顺时针方向旋转,顶底板每 移近0.01毫米,指针转过1小格;同时齿条下端游标随齿条 下移,读数增大。后次读数减去前次读数,即为这段时间内的顶底板移近量。除以经过的时间,即得
计算机视觉第二次作业实验报告
大学计算机视觉实验报告 摄像机标定 :振强 学号:451 时间:2016.11.23
一、实验目的 学习使用OpenCV并利用OpenCV进行摄像机标定,编程实现,给出实验结果和分析。 二、实验原理 2.1摄像机标定的作用 在计算机视觉应用问题中,有时需要利用二位图像还原三维空间中的物体,从二维图像信息出发计算三维空间物体的几何信息的过程中,三维空间中某点的位置与二维图像中对应点之间的相互关系是由摄像机的几何模型决定的,这些几何模型的参数就是摄像机参数,而这些参数通常是未知的,摄像机标定实验的作用就是通过计算确定摄像机的几何、光学参数,摄像机相对于世界坐标系的方位。 2.2摄像机标定的基本原理 2.2.1摄像机成像模型 摄像机成像模型是摄像机标定的基础,确定了成像模型才能确定摄像机外参数的个数和求解的方法。计算机视觉研究中,三维空间中的物体到像平面的投影关系即为成像模型,理想的投影成像模型是光学中的中心投影,也称为针孔模型。实际摄像系统由透镜和透镜组组成,可以由针孔模型近似模拟摄像机成像模型。 图2.1 针孔成像 2.2.2坐标变换 在实际摄像机的使用过程中,为方便计算人们常常设置多个坐标系,因此空间点的成像过程必然涉及到许多坐标系之间的相互转化,下面主要阐述几个重要坐标系之间的转换关系。
2.2.2.1世界坐标系--摄像机坐标系 图2.2 世界坐标系与摄像机坐标系空间关系 世界坐标系与摄像机坐标系之间的转换关系为: ????? ? ????????????=???? ????????111w w w T c c c Z Y X O T R Z Y X R 和T 分别是从世界坐标系到摄像机坐标系的旋转变换和平移变换系数,反映的是世界坐标系和摄像机坐标系之间的关系,因此称为外参数。 2.2.2.2物理坐标系--像素坐标系 图2.3 像素坐标系
实验 电视短片拍摄(1)
实验电视短片拍摄 实训课程:《电视画面编辑》 任课教师:付春苗 实训项目名称:电视短片拍摄 实训对象:媒体2014级1、2班 实训计划学时:10 时间:9-13周 一、实验目的 1.能够熟练地使用电视拍摄设备和后期编辑设备。 2.能较好地运用电视画面进行叙事、表情和达意。 3.能够较好地运用摄像的综合造型手段,完成画面创作。 4.学会写分镜头剧(稿) 本和拍摄提纲。 5.能完成新闻采访的拍摄任务。 二、实验设备和仪器 专业数字摄像机配用电池、内存卡、白纸1张 三、实验内容及要求 1.实验内容 (1)5-10分钟的短片(在老师的指导下)。 (2)电视短片拍摄。 2.实验要求:要求按实验步骤完成实验内容,实验结束后,每组要以光盘形式交实验作品一部;每组同学以书面方式提交实验报告。 四、实验原理及步骤 1.实验原理 电视作品的拍摄,是综合电视摄像技术和电视摄像艺术的知识,完成作品的拍摄与制作任务。电视摄像技术主要是指使用摄像机的能力;电视摄像艺术包括前期策划、画面造型设计与电视作品或新闻创作能力。 2. 步骤 (1)完成(2—10分钟左右)的电视作品或策划新闻节目的拍摄。 (2)选题、策划(可以是短剧、专题片、纪录片、音乐电视、电视散文等); (3)撰写分镜头剧本(稿本); (4)综合运用各种构图、造型方法和技巧进行拍摄; (5)编辑合成(画面、解说、音响)。 五、使用注意事项
1.本实验需要充分的前期准备,包括策划稿或者短剧剧本等相关文档。 2.本实验选题也可以提前向指导老师咨询。 3.在实验拍摄的时候,注意摄像机的调整、白平衡的调整、光学镜头的调整等。 4.如实验机时不够,学生可与实验室联系,利用开放机时完成实验。 六、实验结果分析及实验报告要求: 1.实验结果分析要求 (1)分析电视作品的制作过程。 (2)分析新闻节目创作的过程及相关问题。 (3)实验过程中得出的其他结果,并作出简要分析。 2.实验报告要求 请根据实验的结果和实验指导书的要求,如实地撰写实验报告。其中,“实验记录”填写实验的步骤和过程,“问题与讨论”根据个人实验情况如实记录所发现的问题。 七、实验成绩评定(考试方法): 根据实验考勤、实验过程的表现和实验报告的撰写情况,对每次实验进行打分,采用“优、良、中、合格、不合格”五级计分办法,对于成绩不合格,需要重新实验并撰写实验报告。 最后实验总成绩记入平时成绩,总分为30分。
硬件基础实验指导书与答案
《计算机硬件基础》课程实验指导书 辽宁工程技术大学软件学院 2017年5月
目录 64位操作系统下使用MASM (3) 实验上机操作范例 (5) 实验一CPU结构 (15) 实验二指令格式 (22) //实验三循环程序设计 (25) 实验四综合程序设计(一) (32) 实验五综合程序设计(二) (36) 实验六高级汇编技术 (42)
64位操作系统下使用MASM 1.安装DOSBox。双击DOSBox0.74-win32-installer.exe。 2.运行DOSBox。双击桌面的DOSBox快捷方式,如图1所示。 图1 运行DOSBOX虚拟机 3.将MASM文件夹里的全部文件拷贝到一个目录下,比如d:\masm下,然后将这个目录挂载为DOSBox的一个盘符下,挂载命令为Mount c d:\masm 。然后切换到挂载的c盘,如图2所示。
图2 挂载masm文件夹3.编译汇编源程序,如图3所示。 图3 汇编源程序4.连接和运行源程序,如图4所示。 图4连接和运行源程序
实验上机操作范例 【范例】完成具有如下功能的分段函数 1 X>0 Y = 0 X=0 -1 X<0 其中:X存放在内存单元中,Y为结果单元。【问题分析】根据题意画出程序流程图,如图1所示。 图1 分段函数的程序流程图 根据程序流程图编写如下程序 DSEG SEGMENT X DW ? Y DW ? DSEG ENDS CSEG SEGMENT ASSUME CS: CSEG, DS: DSEG
START:MOV AX, DSEG MOV DS, AX LEA SI, X MOV AX, [SI] AND AX, AX JNS LP1 MOV Y, 0FFH ; X<0 JMP END1 LP1: JNZ LP2 MOV Y, 00H JMP END1 LP2: MOV Y, 01H END1: MOV AH, 4CH INT 21H CSEG ENDS END START 汇编语言程序的开发分为以下4个部分:编辑(生成.asm文件)—→汇编(生成.obj文件)—→连接(生成.exe文件)—→调试。 下面介绍汇编语言源程序从编辑到生成一个可执行文件(.exe文件)的过程。利用Microsoft公司提供的MASM6.15版本的工具包(包括MASM.EXE、LINK.EXE、ML.EXE、DEBUG32.EXE等),如图2所示。
混凝土结构实验指导书及实验报告(学生用)
土木工程学院 《混凝土结构设计基本原理》实验指导书 及实验报告 适用专业:土木工程周淼 编 班级::学 号: 理工大学 2018 年9 月
实验一钢筋混凝土梁受弯性能试验 一、实验目的 1.了解适筋梁的受力过程和破坏特征; 2.验证钢筋混凝土受弯构件正截面强度理论和计算公式; 3.掌握钢筋混凝土受弯构件的实验方法及荷载、应变、挠度、裂缝宽度等数据的测试技术 和有关仪器的使用方法; 4.培养学生对钢筋混凝土基本构件的初步实验分析能力。 二、基本原理当梁中纵向受力钢筋的配筋率适中时,梁正截面受弯破坏过程表现为典型的三个阶段:第一阶段——弹性阶段(I阶段):当荷载较小时,混凝土梁如同两种弹性材料组成的组合梁,梁截面的应力呈线性分布,卸载后几乎无残余变形。当梁受拉区混凝土的最大拉应力达到混凝土的抗拉强度,且最大的混凝土拉应变超过混凝土的极限受拉应变时,在纯弯段某一薄弱截面出现首条垂直裂缝。梁开裂标志着第一阶段的结束。此时,梁纯弯段截面承担的弯矩M cr称为开裂弯矩。第二阶段——带裂缝工作阶段(II阶段):梁开裂后,裂缝处混凝土退出工作,钢筋应力急增,且通过粘结力向未开裂的混凝土传递拉应力,使得梁中继续出现拉裂缝。压区混凝土中压应力也由线性分布转化为非线性分布。当受拉钢筋屈服时标志着第二阶段的结束。此时梁纯弯段截面承担的弯矩M y称为屈服弯矩。第三阶段——破坏阶段(III阶段):钢筋屈服后,在很小的荷载增量下,梁会产生很大的变形。裂缝的高度和宽度进一步发展,中和轴不断上移,压区混凝土应力分布曲线渐趋丰满。当受压区混凝土的最大压应变达到混凝土的极限压应变时,压区混凝土压碎,梁正截面受弯破坏。此时,梁承担的弯矩M u 称为极限弯矩。适筋梁的破坏始于纵筋屈服,终于混凝土压碎。整个过程要经历相当大的变形,破坏前有明显的预兆。这种破坏称为适筋破坏,属于延性破坏。 三、试验装置
电视摄像课程期末复习整理
《电视摄像》课程期末复习资料整理 电视画面的定义:是由摄像机拍摄而成,在电视屏幕上显示而成的图像。 含义:技术上:电视画面是一种电子枪扫描屏幕显现出的光点。 艺术上:是电视工作者认识生活、表现生活,表达自己思想感情的体现。 时空上:是记录从开机到关机一个连续的整体片段,具有时、空两层概念。 作用:(1)是电视节目造型语言的基本因素,基本组成单位,是摄像成果的体现。 (2)电视画面具有极其丰富的表现潜能。 (3)电视画面既表现节目内容和形式。 (4)电视画面有即时的视觉反馈能力。 (5)电视画面是电视片结构、连接的载体和主干。是一个视听结合的信息结构,包括光线色彩和活动影像可视的复合体。 (6)电视画面体现了多种传播媒介和传播方式的兼容和优化的信息传播。 (7)电视画面兼负多种信息通道,具有最大的单位时空信息容量。 电视画面的空间特性:(1)屏幕显示 (2)平面造型 电视屏幕在两维空间上,再现和表现三绝维空间,是一种向现实生活 空间的延伸。 (3)框架结构 如何突破画面的平面局限性: (1)利用人眼的视觉经验在平面上创造出具有纵深感的立体空间。 (2)利用画面中运动的物体显示空间的纵深感和立体感。 (3)利用摄像机的运动突破画面的平面造型局限。 电视画面的时间特征:(1)单向性(2)连续性一是时间形态的连续。二是运动变化的连续。 (3)同时性 电视画面造型特点: 表现具体形象:1、再现和表现具体事物形象。 2、再现和表现人物具体形态。 表现运动:物体运动形态、物体运动的速度、节奏及运动的全过程。 1.电视画面表现运动突破了绘画、图片等造型艺术发展空间。 2.电视画面是展示运动之美的全景舞台。 运动表现:电视摄像机通过运动,往往能造成画面框架的运动,画面中景物由于画框的运动而处于运动之中。 电视画面的取材要求:第一,画面的信息应清晰准确,简明集中。 第二,画面的光色还原要力求真实、准确。 第三,镜头运动时力求稳定、流畅、到位。 第四,注意同期声的采录。 拍摄时的操作要领:1、“平”是指拍摄的画面构图一定要与地平线相平。 2、“准”包含三层意义;一是起、落幅要准;二是画面取景范围(景别) 要卡准;三是校正焦距要准确,即聚焦要准;四是景物色彩和亮度还原 (重放时)要准确,即光圈控制、光比和用光控制、白平衡调整要准确。 3、“稳”是指保持摄像机拍摄的画面稳定性,避免不必要的晃动。 4、“匀”是相对的。无论是推、拉、摇、移,都是对观众某种心理的诱导, 有时根据情绪掌握节奏,快慢要有一定依据。
计算机组成原理实验指导书
计算机组成原理 实验报告 学号: 姓名: 提交日期: 成绩: 计算机组成原理实验报告 Computer Organization Lab Reports ______________________________________________________________________________ 班级: ____ 姓名:____学号:_____ 实验日期:____
一.实验目的 1. 熟悉Dais-CMX16+达爱思教仪的各部分功能和使用方法。 2. 掌握十六位机字与字节运算的数据传输格式,验证运算功能发生器及进位控制的组合功能。了解运算器的工作原理。 3. 完成算术、逻辑、移位运算实验,熟悉ALU运算控制位的运用。 ______________________________________________________________________________二.实验环境 Dais-CMX16+达爱思教仪 ______________________________________________________________________________三.实验原理 实验中所用的运算器数据通路如图1-1所示。ALU运算器由CPLD描述。运算器的输出经过2片74LS245三态门与数据总线相连,2个运算寄存器AX、BX的数据输入端分别由4个74LS574锁存器锁存,锁存器的输入端与数据总线相连,准双向I/O输入输出端口用来给出参与运算的数据,经2片74LS245三态门与数据总线相连。 图1-1 运算器数据通路 图1-1中,AXW、BXW在“搭接态”由实验连接对应的二进制开关控制,“0”有效,通过【单拍】按钮产生的负脉冲把总线上的数据打入,实现AXW、BXW写入操作。 表1-1 ALU运算器编码表 算术运算逻辑运算 M M13 M12 M11 功能M M13 M12 M11 功能 M S2 S1 S0 M S2 S1 S0 0 0 0 0 A+B+C 1 0 0 0 读B 0 0 0 1 A—B —C 1 0 0 1 非A 0 0 1 0 RLC 1 0 1 0 A-1
土工实验指导书及实验报告
土工实验指导书及实验报告编写毕守一 安徽水利水电职业技术学院 二OO九年五月
目录 实验一试样制备 实验二含水率试验 实验三密度试验 实验四液限和塑限试验 实验五颗粒分析试验 实验六固结试验 实验七直接剪切试验 实验八击实试验 土工试验复习题
实验一试样制备 一、概述 试样的制备是获得正确的试验成果的前提,为保证试验成果的可靠性以及试验数据的可比性,应具备一个统一的试样制备方法和程序。 试样的制备可分为原状土的试样制备和扰动土的试样制备。对于原状土的试样制备主要包括土样的开启、描述、切取等程序;而扰动土的制备程序则主要包括风干、碾散、过筛、分样和贮存等预备程序以及击实等制备程序,这些程序步骤的正确与否,都会直接影响到试验成果的可靠性,因此,试样的制备是土工试验工作的首要质量要素。 二、仪器设备 试样制备所需的主要仪器设备,包括: (1)孔径0.5mm、2mm和5mm的细筛; (2)孔径0.075mm的洗筛; (3)称量10kg、最小分度值5g的台秤; (4)称量5000g、最小分度值1g和称量200g、最小分度值0.01g的天平;
(5)不锈钢环刀(内径61.8mm、高20mm;内径79.8mm、高20mm或内径61.8mm、高40mm); (6)击样器:包括活塞、导筒和环刀; (7)其他:切土刀、钢丝锯、碎土工具、烘箱、保湿器、喷水设备、凡士林等。 三、试样制备 (一)原状土试样的制备步骤 1、将土样筒按标明的上下方向放置,剥去蜡封和胶带,开启土样筒取土样。 2、检查土样结构,若土样已扰动,则不应作为制备力学性质试验的试样。 3、根据试验要求确定环刀尺寸,并在环刀内壁涂一薄层凡士林,然后刃口向下放在土样上,将环刀垂直下压,同时用切土刀沿环刀外侧切削土样,边压边削直至土样高出环刀,制样时不得扰动土样。 4、采用钢丝锯或切土刀平整环刀两端土样,然后擦净环刀外壁,称环刀和土的总质量。 5、切削试样时,应对土样的层次、气味、颜色、夹杂物、裂缝和均匀性进行描述。 6、从切削的余土中取代表性试样,供测定含水率以及颗粒分析、界限含水率等试验之用。
计算机视觉测量与导航_张正友法相机标定 _结课实验报告
H a r b i n I n s t i t u t e o f T e c h n o l o g y 计算机视觉测量与导航 实验报告 院系:航天学院 学科:控制科学与工程 姓名:TSX 学号: 任课教师:张永安卢鸿谦 日期:2014.05.13
摘要 人类视觉过程可看成是一个复杂的从感觉到知觉的过程,也就是指三维世界投影得到二维图像,再由二维图像认知三维世界的内容和含义的过程。信号处理理论与计算机出现以后,人们用摄像机等获取环境图像并转换成数字信号,完成对视觉信息的获取和传输过程,用计算机实现对视觉信息的处理、存储和理解等过程,形成了计算机视觉这门新兴学科。其中从二维图像恢复三维物体可见表面的几何结构的工作就叫做三维重建。随着计算机硬件、软件、图像采集、处理技术的迅速发展,三维重建的理论和技术已被广泛应用于航空航天、机器人技术、文字识别、工业检测、军事侦察、地理勘察、现场测量和虚拟植物可视化等领域。相机标定是三维重建必不可少的步骤,它包括对诸如主点坐标、焦距等与相机内部结构有关的内部参数的确定和对相机的旋转、平移这些外部参数的确定。价格低廉的实验器材、简单的实验环境、快捷的标定速度和较高的标定精度是现在相机标定研究追求的几大方向。数码相机的标定就是研究的热点之一。本次报告介绍了基于棋盘格模板标定的基本原理和算法,利用MATLAB的相机标定工具箱,使用张征友算法对相机进行了标定,记录了标定的过程,并给出结果,最后对影响标定精度的因素进行了分析。 关键词:相机标定张正友角点提取内外参
1基于棋盘格标定的基本原理和算法 1.1基础知识 1.1.1射影几何 当描述一张相机拍摄的图像时,由于其长度、角度、平行关系都可能发生变化,因此无法完全用欧氏几何来处理图像,而射影几何却可以,因为在射影几何中,允许存在包括透视投影的更大一类变换,而不仅仅是欧氏几何的平移和旋转。实际上,欧氏几何是射影几何的一个子集。 1.1.2齐次坐标 设欧氏直线上点p的笛卡尔坐标为(x,y)T,如果x1,x2,x3满足x=x1/x2,y =x2/x3,x3≠0,则称三维向量(x1,x2,x3)T为点P的齐次坐标。当x3= 0时,(x1,x2,0)T规定直线上的无穷远点的齐次坐标。 实际上,齐次坐标是用一个n+ 1维向量来表示原本n维的向量。应用齐次坐标的目的是用矩阵运算把二维、三维甚至高维空间中的一个点集从一个坐标系变换到另一个坐标系。形的几何变换主要包括平移、旋转、缩放等。以矩阵表达式来计算这些变换时,平移是矩阵相加,旋转和缩放则是矩阵相乘,综合起来可以表示为P’=R*P+T(R为旋转缩放矩阵,T为平移矩阵,P为原向量,P′为变换后的向量)。当n+1维的齐次坐标中第n+1维为0,则表示n维空间的一个无穷远点。
电视摄像与编辑实验报告
电视摄像与编辑实验报告 篇一:电视摄像与画面编辑实践报告 教育信息技术与传媒学院 Institute of Educational Information Technology and Communication 实验报告 课程名称电视摄像与画面编辑专业广播电视编导班级 教师评语 阅 分数 日期: 篇二:电视摄像课程小结 电视摄像课程小结 何峻峰 XX210722 课程小结 通过本学期对于《电视摄像》课程的学习和几次非常宝贵的实验实践学习经历,我对电视摄像在技术层面有了基本的了解和掌握。我不但掌握了一些摄像机设备如SONY1500C 和各种三脚架的使用技巧,另外我也学习了电视摄像的造型元素、拍摄手法等摄像基本知识,也了解了景别、光线、角度、色彩光学镜头等各种因素对拍摄画面的影响,还初步形
成了将叙事语言表意分解成镜头语言以及将镜头语言串联成叙事语言的意识。 其中,给我最大帮助的莫过于老师每节课老师播放的视频和实验课上的自我实践,我一直觉得只有通过看别人的还有自己去拍才能学到真正的东西,毕竟纸上得来终觉浅,绝知此事要躬行嘛。通过一次次实际拍摄,我对于固定镜头和运动镜头,特别是摇镜头理解又上到了更高的层次。同时,我还学到了到达拍摄现场第一要务是观察环境,然后根据环境制定合适的拍摄计划,例如,当拍摄主体要从右往左移动时,那么我们摄像师也应该提前掌握他的移动轨迹,以此来调整自己的站位走位调整画面构图。其次为了拍摄画面稳定,脚架是必不可少的,但是如果没有脚架,那么我们最好能寻到合适的支撑物,接着开机,调节白平衡,然后拍摄,而且要谨记的是,拍摄镜头长度的规律:固定画面至少为5秒,运动镜头则至少为15秒,若要拍摄文字,则不能低于观众全部浏览一遍文字所需的最短时间,等等。 通过课堂理论学习和课外教学实践,我明白了确定画面主体的重要性,主体是画面表现的主要对象,承担着叙事和表现的直接责任,如果一个画面缺少主体,那么即使拍摄角度、手法等其他环节控制得再好,这个画面也无疑是失败的,不能用于后期编辑的。而确定主体后,还要让一定的陪体入画,陪体的责任是帮助主体说明内容,衬托主体,使观众更
计算机硬件实验指导书模板
第一部分EL实验系统的结构 EL-l微机实验教学系统由功能实验板、可选的CPU板、二块小面包板三部分构成, 可安装在45*30*10cm的实验箱内。总框图如下: 面包板: 1)通用面包板 2)金属圆孔组成的通用实验板 CPU板: 1)8086 PC总线板 2)8086 CPU板 3)8051 CPU板 4)8098 CPU板 5)80C198 CPU板 功能实验板: 由若干相对独立的功能接口电路组成, 它们是: D/A电路、A/D电路、发光二极管电路、开关量输入电路、RAM/ROM电路、简单I/O电路、8253可编程定时器/计数器电路、8255并行接口电路、总线驱动电路、8279接口电路、单脉冲发生器、LED显示电路、键盘电路、复位电路、8250串行接口电路。 ( 一) 功能实验板结构
1、输出显示电路 1)数码显示电路。 该电路由6位共阴极数码管, 3片75452, 2片74SL07组成, 74LS07为段驱动器, 相应输入插孔为CZ4。75452为位驱动器, 相应输入插控为CZ3(LD1, LD2, LD3, LD4, LD5, LD6)。 2)LED灯显示电路。 该电路由2片74LS04, 12只发光二极管( 红、绿、黄各4只) 组成。12只二极管相应的输人插孔为CZ2(LI1, LI2, LI3, LI4, LI5, LI6, LI7, LI8, LI9, LI10, LIl1, LIl2) 2、信号发生电路 1)开关量输入电路: 该电路由8只开关组成, 每只开关有两个位置, 一个位置代表高电平, 一个位置代表低电平。该电路的输出插孔为CZl(Kl, K2, K3, K4, K5, K6, K7, K8)。 2)时钟输入电路: 该电路由1片74LSl6l组成: ·当CPU为PC总线时, 输入时钟为AT总线的CLK, ·当CPU为805l、8098、80C198时, CLK的输入时钟为晶振频率, ·当CPU为8086时, CLK是2MHz。 输出时钟为该CLK的2分频(CLK0), 4分频(CLKI), 8分频(CLK2), 16分频(CLK3), 相应输出插孔CZ47(CLK0, CLKl, CLK2,
CAD上机实验指导书及实验报告
北京邮电大学世纪学院 实验、实习、课程设计报告撰写格式与要求 (试行) 一、实验报告格式要求 1、有实验教学手册,按手册要求填写,若无则采用统一实验报告封面。 2、报告一律用钢笔书写或打印,打印要求用A4纸;页边距要求如下:页边距上下各为2.5厘米,左右边距各为2.5厘米;行间距取固定值(设置值为20磅);字符间距为默认值(缩放100%,间距:标准)。 3、统一采用国家标准所规定的单位与符号,要求文字书写工整,不得潦草;作图规范,不得随手勾画。 4、实验报告中的实验原始记录,须经实验指导教师签字或登记。 二、实习报告、课程设计报告格式要求 1、采用统一的封面。 2、根据教学大纲的要求手写或打印,手写一律用钢笔书写,统一采用国家标准所规定的单位与符号,要求文字书写工整,不得潦草;作图规范,不得随手勾画。打印要求用A4纸;页边距要求如下:页边距上下各为2.5厘米,左右边距各为2.5厘米;行间距取固定值(设置值为20磅);字符间距为默认值(缩放100%,间距:标准)。 三、报告内容要求 1、实验报告内容包括:实验目的、实验原理、实验仪器设备、实验操作过程、原始数据、实验结果分析、实验心得等方面内容。 2、实习报告内容包括:实习题目、实习任务与要求、实习具体实施情况(附上图表、原始数据等)、实习个人总结等内容。 3、课程设计报告或说明书内容包括:课程设计任务与要求、总体方案、方案设计与分析、所需仪器设备与元器件、设计实现与调试、收获体会、参考资料等方面内容。 北京邮电大学世纪学院 教务处 2009-8
实验报告 课程名称计算机绘图(CAD) 实验项目AutoCAD二维绘图实验 专业班级 姓名学号 指导教师实验成绩 2016年11月日
计算机视觉实验报告Experiment3
Experiment 3:Edge Detection Class: 电子1203班Student ID: 1210910322 Name: 王影 Ⅰ. Aim The aim of this laboratory session is to learn to deal with image data by Matlab. By the end of this session, you should be able to perform image preprocessing of edge detection in spatial domain and frequency domain. Ⅱ. Knowledge required in the Experiment ⅰ.You are supposed to have learned the basic skills of using Matlab; ⅱ.You need to review Matlab programming language and M-file format. ⅲ. You should have studied edge detection methods. Ⅲ.Experiment Contents Demand: Please show the figure on the left and list the codes on the right respectively bellow each question.(请将运行结果(图片)和程序代码贴在每题下方) ⅰ.Read “car.jpg” file (to do this by imread function), convert the color image into grayscale image, and then perform edge detection using Roterts, Prewitt, Sobel operator separately in spatial domain and display the results in a Matlab window. 程序: clear; im=imread('car.jpg'); I=rgb2gray(im); subplot(3,2,1);imshow(I); title('Gray image'); [Y,X]=size(I); im_edge=zeros(Y,X); T=30; for k=2:Y-1 for kk=2:X-1 im_edge(k,kk)=abs(I(k+1,kk+1)-I(k,kk))+abs(I(k,kk+1)-I(k+1,kk)); if (im_edge(k,kk)>T)
电视节目编导与制作实验指导书
《电视节目编导与制作》 实 验 指 导 书 适用专业:教育技术学
实验项目: 实验一摄像机的使用实验二固定机位拍摄实验三景不拍摄训练实验四运动画面拍摄实验五综合拍摄训练实验六视音频采集 实验七视音频剪辑 实验八专题片创作
实验一摄像机的使用 一、实验目的 1、熟悉摄像机的要紧开关、按钮及插座的功能。 2、学会摄像机的操作方法。 3、了解使用摄像机时的注意事项。 4、学会三角架的使用。 二、实验仪器 数字摄像机、三脚架、数字磁带、电池 三、实验内容 认识摄像机及其差不多操作;熟悉常见的几种执机方法。 四、实验步骤 1.认识摄像机及其差不多操作 (1)电池的安装 (图一)
A.抬起取景器; B.按电池上的▼标志方向插入并推动充电式电池直至发出咯哒声。(如图一所示) (2)装入磁带 (图二) A.安装好电源 B.按下EJECT开关上的兰色小键并朝箭头方向拨动来打开录象带盖,录象带舱随后自动打开; C.推录象带背部的中间部位将其装入。使录象带窗向外、写爱护片向上笔直装入录象带舱底部。 D.按录像带舱上的PUSH标志关闭录像带舱。 E.按录像带盖上的PUSH标志关闭录像带舱。(如图二所示) (3)白平衡的调整 A.当摄像机处于待机、摄像或存储方式时,将AUTO LOCK选择开关设定于中央(自动锁定取消)位置; B.按WHT BAL键。白平衡指示随后出现在液晶显示屏或取景器中; C.转动SEL/PUSH EXEC 拨盘以选择适合的白平衡方式。转动
拨盘时,显示将会出现图中方框3的三种状态(室内、室外、自调节)。若选择了自调节方式,则首先对准一个白色物体如纸张的全景,然后按SEL/PUSH EXEC拨盘,指示灯快速闪耀,几秒钟后会停止闪耀,则表示白平衡调好并存入存储器。(如图三所示) (图三) (图四) (4)光圈调节 A.当摄像机处于待机、摄像或存储方式时,将AUTO LOCK选择开关设定于中央(自动锁定取消)位置; B.按IRIS键。光圈指示随后出现在液晶屏或取景器中; C.转动IRIS拨盘以调节光圈。转动拨盘时,F值将有如下变
计算机组成原理实验指导书
计算机组成原理实验指导书适用TD-CMA实验设备
实验一基本运算器实验 一、实验原理 运算器内部含有三个独立运算部件,分别为算术、逻辑和移位运算部件,要处理的数据存于暂存器A和暂存器B,三个部件同时接受来自A和B的数据(有些处理器体系结构把移位运算器放于算术和逻辑运算部件之前,如ARM),各部件对操作数进行何种运算由控制信号S3 0 CN来决定,任何时候,多路选择开关只选择三部件中一个部件的结果作为ALU的输出。如果是影响进位的运算,还将置进位标志FC,在运算结果输出前,置ALU零标志。ALU中所有模块集成在一片CPLD中。 逻辑运算部件由逻辑门构成,较为简单,而后面又有专门的算术运算部件设计实验,在此对这两个部件不再赘述。移位运算采用的是桶形移位器,一般采用交叉开关矩阵来实现,交叉开关的原理如图1-1-2所示。图中显示的是一个4X4的矩阵(系统中是一个8X8的矩阵)。每一个输入都通过开关与一个输出相连,把沿对角线的开关导通,就可实现移位功能,即: (1) 对于逻辑左移或逻辑右移功能,将一条对角线的开关导通,这将所有的输入位与所使用的输出分别相连,而没有同任何输入相连的则输出连接0。 (2) 对于循环右移功能,右移对角线同互补的左移对角线一起激活。例如,在4位矩阵中使用‘右1’和‘左3’对角线来实现右循环1位。 (3) 对于未连接的输出位,移位时使用符号扩展或是0填充,具体由相应的指令控制。使用另外的逻辑进行移位总量译码和符号判别。 原理如图1-1-1所示
图1-1-1 运算器原理图 运算器内部含有三个独立运算部件,分别为算术、逻辑和移位运算部件,要处理的数据存于暂存器A和暂存器B,三个部件同时接受来自A和B的数据(有些处理器体系结构把移位运算器放于算术和逻辑运算部件之前,如ARM),各部件对操作数进行何种运算由控制信号S3 0 决定,任何时候,多路选择开关只选择三部件中一个部件的结果作为ALU的输出。如果是算术运算,还将置进位标志FC,在运算结果输出前,置ALU零标志。ALU中所有模块集成在一片CPLD(MAXII EPM240)中。 逻辑运算部件由逻辑门构成,较为简单,而后面又有专门的算术运算部件设计实验,在此对这两个部件不再赘述。移位运算采用的是桶形移位器,一般采用交叉开关矩阵来实现,交叉开关的原理如图1-1-2所示。图中显示的是一个4X4的矩阵(系统中是一个8X8的矩阵)。每一个输入都通过开关与一个输出相连,把沿对角线的开关导通,就可实现移位功能,即:
《流体力学》课程实验(上机)指导书及实验报告格式
《流体力学》课程实验指导书袁守利编 汽车工程学院 2005年9月
前言 1.实验总体目标、任务与要求 1)学生在学习了《流体力学》基本理论的基础上,通过伯努利方程实验、动量方程实 验,实现对基本理论的验证。 2)通过实验,使学生对水柱(水银柱)、U型压差计、毕托管、孔板流量计、文丘里流量计等流体力学常用的测压、测流量装置的结构、原理和使用有基本认识。 2.适用专业 热能与动力工程 3.先修课程 《流体力学》相关章节。 4.实验项目与学时分配 5. 实验改革与特色 根据实验内容和现有实验条件,在实验过程中,采取学生自己动手和教师演示相结合的方法,力求达到较好的实验效果。
实验一伯努利方程实验 1.观察流体流经实验管段时的能量转化关系,了解特定截面上的总水头、测压管水头、压强水头、速度水头和位置水头间的关系,从而加深对伯努利方程的理解和认识。 2.掌握各种水头的测试方法和压强的测试方法。 3.掌握流量、流速的测量方法,了解毕托管测速的原理。 二、实验条件 伯努利方程实验仪 三、实验原理 1.实验装置: 图一伯努利方程实验台 1.水箱及潜水泵 2.上水管 3.电源 4.溢流管 5.整流栅 6.溢流板 7.定压水箱 8.实验 细管9. 实验粗管10.测压管11.调节阀12.接水箱13.量杯14回水管15.实验桌 2.工作原理 定压水箱7靠溢流来维持其恒定的水位,在水箱下部装接水平放置的实验细管8,水经实验细管以恒定流流出,并通过调节阀11调节其出水流量。通过布置在实验管四个截面上的四组测压孔及测压管,可以测量到相应截面上的各种水头的大小,从而可以分析管路中恒定流动的各种能量形式、大小及相互转化关系。各个测量截面上的一组测压管都相当于一组毕托管,所以也可以用来测管中某点的流速。 电测流量装置由回水箱、计量水箱和电测流量装置(由浮子、光栅计量尺和光电子
机器视觉实验报告
机器视觉实验报告
目录 一实验名称 (2) 二试验设备 (2) 三实验目的 (2) 四实验内容及工作原理 (2) (一)kinect for windows (2) (二)手持式自定位三维激光扫描仪 (3) (三)柔性三坐标测量仪 (9) (四)双面结构光 (10) 总结与展望 (14) 参考文献 (16)
《机器视觉》实验报告 一、实验名称 对kinect for windows、三维激光扫描仪、柔性三坐标测量仪和双面结构光等设备结构功能的认识。 二、实验设备 kinect for windows、三维激光扫描仪、柔性三坐标测量仪、双面结构光。 三、实验目的 让同学们对机器视觉平时所使用的仪器设备以及机器视觉在实际运用中的具体实现过程有一定的了解。熟悉各种设备的结构功能和操作方法,以便于进行二次开发。其次,深化同学们对机器视觉系统的认识,拓宽同学们的知识面,以便于同学们后续的学习。 四、实验内容及工作原理 (一)kinect for windows 1.Kinect简介 Kinectfor Xbox 360,简称Kinect,是由微软开发,应用于Xbox 360 主机的周边设备。它让玩家不需要手持或踩踏控制器,而是使用语音指令或手势来操作Xbox360 的系统界面。它也能捕捉玩家全身上下的动作,用身体来进行游戏,带给玩家“免控制器的游戏与娱乐体验”。2012年2月1日,微软正式发布面向Windows系统的Kinect版本“Kinect for Windows”。 2.硬件组成 Kinect有三个镜头[1],如图1-1所示。中间的镜头是RGB 彩色摄影机,用来采集彩色图像。左右两边镜头则分别为红外线发射器和红外线CMOS 摄影机所构成的3D结构光深度感应器,用来采集深度数据(场景中物体到摄像头的距离)。彩色摄像头最大支持1280*960分辨率成像,红外摄像头最大支持640*480成像。Kinect还搭配了追焦技术,底座马达会随着对焦物体移动跟着转动。Kinect也内建阵列式麦克风,由四个麦克风同时收音,比对后消除杂音,并通过其采集声音进行语音识别和声源定位[2][3]。