红外主动式PSD测距系统
第26卷第3期光电工程V ol.26, No.3 1999年6月Opto-Electronic Engineering June,1999 文章编号:1003-501X(1999)03-0042-05
红外主动式PSD测距系统
冯华君,徐之海,李 奇
(浙江大学光学仪器国家重点实验室,浙江杭州310027)
摘要:主动式PSD测距系统是一种无运动机构、结构简单、精度较高的实用型测距系
统。介绍了该系统原理,给出了测距系统的计算公式及计算结果。讨论了控制电路原
理和电路设计中的关键问题,并应用此电路进行了测距实验,得出了实验数据和结
论。
关键词:测距系统,位置敏感器件,红外测距,控制电路。
中图分类号:TH76 文献标识码:A
An Infr ared Active Position
Sensitive Device Range Finding System
FENG Hua-jun,XU Zhi-hai,LI Qi
(State K e y La boratory of Mod ern O ptical I nstr ument,
Zhe jiang Univer sity,H angzhou310027,China)
Abstr act:An infr ar ed active Position Sensitive Device(PSD)range finding system is
a practical,simple and high-accuracy range finding system without moving mecha-
nism.T he operating pr inciple of the system is introduced in the paper and the calcu-
lating equations for the range finding system are given.T he principle of the control
circuit and the key problems in circuit design are discussed.T he range finding ex-
periments are carried out with this circuit.The experimental data and the conclu-
sions are obtained.
Key wor ds:Range-finding optical systems,Position sensitive devices,Infrared rang-
ing,Control circuits.
收稿日期:1997-07-31;收到修改稿日期:1998-08-27
基金项目:国家自然科学基金资助项目(69775020)
作者简介:冯华君(1963-),男(汉族),浙江杭州人,浙江大学教授,硕士导师,中国光学学会光电技术专业委员会委员,《光电工程》编委,主要从事光学仪器研究;徐之海(1964-),男(汉族),浙江杭州人,副教授,工博士,硕士导
师,主要从事光学仪器研究;李奇(1973-),男(汉族),黑龙江牡丹江市人,工硕士,从事光学仪器研究。
CLC number :T H76
引 言
对某一特定物体距离的测量是光学仪器领域的热门课题之一。在机器人视觉方面,快速精确的测距系统使机器人迅速准确地判断目标与机器人的距离,以便使机器人迅速做出相应的判断和动作。在照相机或其它成象仪器中,精确地获得目标距离信息,可使仪器成象清晰,获得满意的效果。
测距方法很多,目前应用较多的主要有反射能量法、超声时间法、带运动机构的双象比较法和PSD 测距法[1,2]
。反射能量法中仪器发射一束光(通常是近红外光)照射到被测物体表面,仪器同时接收被测物体的反射光能量,根据接收到的反射光能量来判断被测物体的距离;超声时间法测量一束超声波从发射到反射回仪器的时间来判断被测距离;带运动机构的双象比较法则比较复杂,系统中有二套光路对被测物体成象,其中一套光路是经过可运动的反光镜获得的,接收系统及时比较二套光路来的图象,当二者一致时,就可根据可运动反光镜的位置来获得物体的距离信息;PSD 测距法利用三角测距原理,用一种称之为位置敏感器件(Position Sensitive Device)的PSD 元件来获得二路输出信号,根据这二路信号来获得物体的距离量值。图1 PSD 元件结构
Fig.1 Constitution of position
s ens itive device
本文将对此作一介绍,并给出部分实验结果。
1 PSD 测距原理
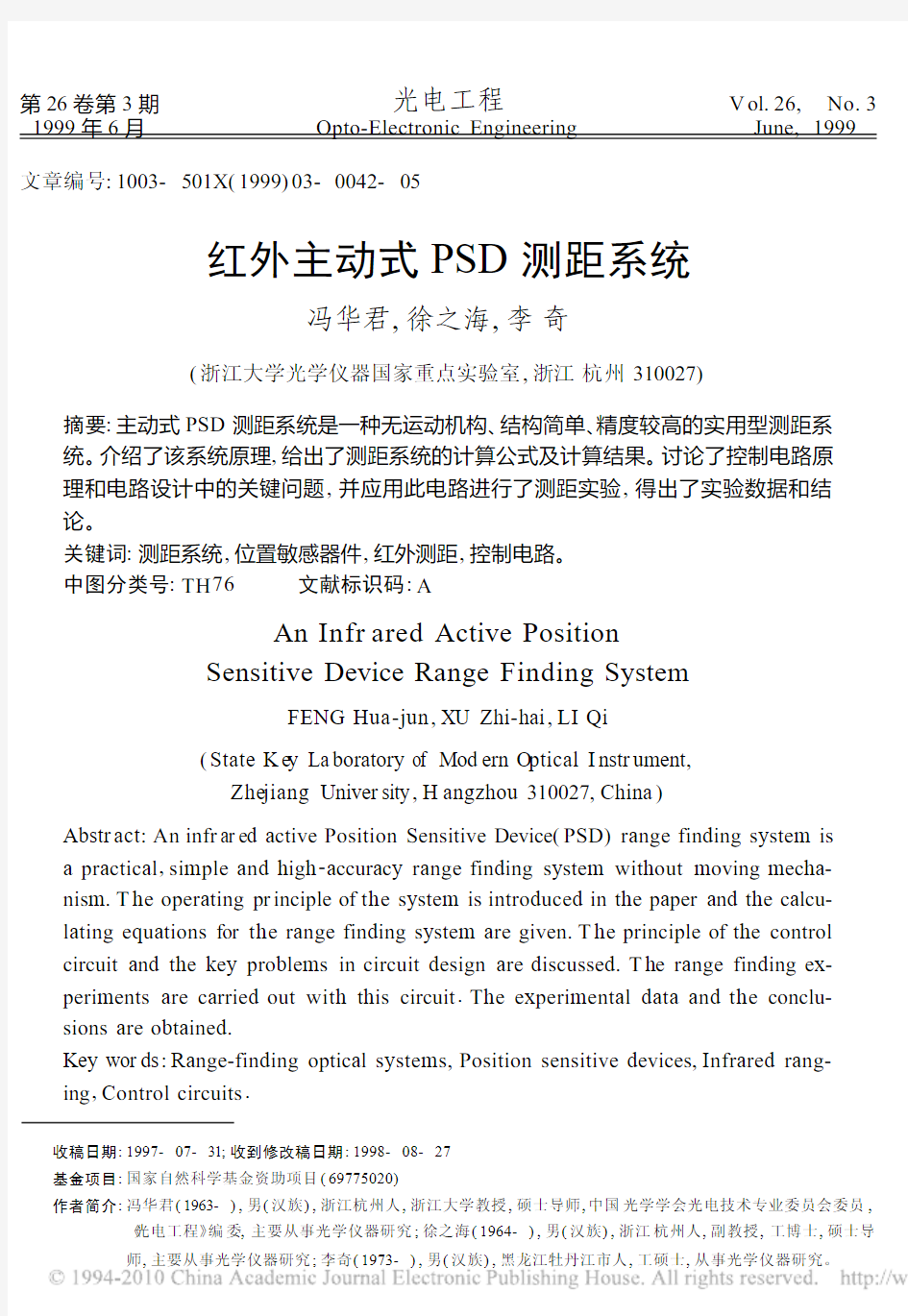
位置敏感器件PSD 是在表面层能产生光电效应的PN 结上,分别引出相对应的二组电极和公共极,如图1所示。
在PSD 元件上,电极A 到电极B 的距离为D ,其内阻为R D 。当接收入射光线后,光束位置到电极A 的距离为x ,相应电阻值为R x 。由于光线入射后产生光电子,使电阻层内的光电流与入射光强成正比,并与入射光束到各电极间的距离成正比。当入射光点一定后,则在电极
A 与电极
B 处,产生与入射点到相应电极的间距有关的对应电流。例如,光束激发后的总光电流为I 0,相应电极A 与电极B 端产生的电流分别为I A 和I B ,各量值符号的意义如图1所示,测距系统几何关系如图2。为使测距范围更宽、灵敏度更高,PSD 的中心并不对准无限远,而是对准中间距离l 0处。由几何关系可知,这时的PSD 实际上已经移位了一个偏移量$x o :
$x o =l b f ′/l 0(1)式中f ′为测距接收透镜焦距,l b 为接收透镜与发射透镜距离。根据PSD 特性,当被测物距为l
时,有
I A ∝D 2+$x =D 2+
(2)I B ∝D 2-$x =D 2-(3)
输出信号的比值P 与距离l 有关:
43
1999年6月 冯华君等:红外主动式PSD 测距系统
图2 测距系统结构
Fig.2 Cons titu tion of the r ange
findin g s ystem
P l =I A
I
B =
D 2+l b f
′
l -$x 0D 2-l b f ′
l
-$x 0(4)
1l
-1l 0=D 2l b f ′?P l -1P l +1(5)
当测距系统结构确定后,l b 、f ′
、D 为常数,设
M =D /2l b f
′
(6)则
1
l -1l 0=M P l -1P l +1
(7)
上式表示输出电流的比值P l 与物距l 的相互关系,所以不需确定各点电流值,完全可由比值P l 获得相应于被
测物距l 的参数值。这种方式可降低对控制电路的要求,测距变得比较容易。如系统结构选l b =34mm,f ′=15mm,D =3mm,中间基准物距取l 0=2m 时,P l 值与物距l 的关系如表1。
表1 $V AB ,P l 与l 的关系Table 1 Relations of $V AB ,P l and l
Dis tance l (mm )
1l -1l 0
(mm -1)
P l $V AB (mV)V out (V)1000 5.0×10-4
1.4108.68 4.341100 4.09×10-4
1.3237.08 3.541200 3.33×10-4 1.256 5.76
2.881400
2.14×10-4 1.157
3.68 1.841600 1.25×10
-4 1.089 2.15 1.0818000.56×10-4
1.0390.970.48200001002500 1.0×10-4
0.934- 1.72-0.863000 1.67×10
-4
0.893- 2.86- 1.43
4000 2.50×10-4
0.843- 4.58- 2.295000 3.0×10-4
0.815- 5.16- 2.5810000
4.0×10-
4
0.760
- 6.93
- 3.47
P l 是A 、B 二路电流的比值,实际电路中要做除法运算是很困难的,可把I A ,I B 进行对数压缩,也可先把I A ,I B 分别以相同放大倍率放大和隔直选频后再进行对数压缩,以V A 和V B 表示(见本文第二部分控制电路),再进行减法运算和放大处理。设对数压缩前的放大隔直选频电路放大倍率为B 1,则有:
V A =
kT e ln B 1I A
I 0
(8)V B =kT e ln
B 1I B
I 0
(9)(10)
44
光电工程 第26卷第3期
式中玻尔兹曼常数k =1.381×10-23
J ·K -1
;电子电量e =1.602×10-19
C;室温下T =293K 。由式(10)可见,减法器输出值与预放大倍率B 1无关,仅与P l 值有关。设减法电路后的放大电路的放大倍率为B 2,其输出电压为
V out =B 2$V AB =B 2kT
e ln P l
(11)
本系统取B 2=500,则不同物距时所对应的$V AB ,V out 值也可计算得到,列于表1内。
2 控制电路
控制电路原理如图3,包括发射电路(a )和接收电路(b )两大部分。发射电路采用选频调制系统。根据IRED 发射管与PSD 接收器件的选频特性,采用约700Hz 频率的调制系统,由IRED 管发射一个f ≈700Hz 的延续约100ms 的脉冲光信号。采用脉冲信号的主要目的是:1)与干扰信号区别开,易于消除噪声;2)将有用信号与自然界中的自然光产生的直流信号相隔离;3)在发光二极管IRED 允许的情况下,
提高瞬间发光功率。
图3 控制电路原理图
Fig .3 Schematic diagram of the control circu it
接收部分电路中,当有红外光束照射在PSD 上时,A ,B 二端均有光电流输出。二端的光电流分别经完全相同的二套电路进行电流电压转换、选频放大和对数压缩,然后作减法运算,再经放大,即得到一个与比值P l 有关的输出信号。
在本电路中有几点值得指出:1)由于发射部分发出的是一个振荡信号,因而发射部分对接收部分的干扰十分严重,如果不去掉这种干扰,那么在远距离时,干扰信号将大于有用信号,使电路不能正常工作,为此而采取的主要措施有:1空间隔离;o电路屏蔽;?电容稳定电源。2)虽然对数压缩前的放大倍率对电路输出结果无影响,但仍应以电路不饱和、工作在最佳状态为原则。由于自然光照明物体部分的光线进入PSD 后产生的光电流较大,为防止饱和,选频放大前的放大倍率B 1不宜过大。3)对数压缩电路采用二极管压缩,二极管的温度特性对于输出结果有较大影响。本系统二套电路对数压缩后的输出作减法运算,因此二只对数管宜采用制造工艺一致的对管,以互相抵消温度漂移的影响。
3 实验结果及讨论
上述电路完成后,把目标置于2m 处,对PSD 位置及电路进行定标固定,使物距为2m 时电路输出为零。定标以后,移动目标,测出不同物距时的输出电压V out ,然后根据实测V out 值由
45
1999年6月 冯华君等:红外主动式PSD 测距系统
公式(11)计算P l 值,再由(5)式计算得到测量结果l ′
,列于表2中。实际物距l 与测量结果l ′
的关系曲线如图4所示,坐标以1/l 和1/l ′
表示,图中45°斜线即为无误差时的理想情况。由图可见,实测结果与理想曲线比较接近,完全能满足类似于照相机、摄象机等一般光学仪器的测距需要。
表2 距离测试结果
Table 2 Ran ge finding res ults
Dirtance l (mm)
V out (V)P l Res ult l ′(m m)
1000 4.81 1.4649491100 4.25 1.40010101200
3.55 1.3251098
1400 2.02 1.17413601600 1.08 1.0891********.77 1.063169620000120002500-0.760.94224263000- 1.250.90628174000- 1.430.89329965000- 2.370.829444410000
- 2.99
0.789
6531
图4 距离测试结果
Fig .4 Rang e fin ding res ults
距离测量结果l ′的精度与PSD 的位置分辨误差$x 、基线长度l b 和接收透镜焦距f ′
以及控制电路精度有关。参见图2,距离测量误差$l =l 0-l 与PSD 位置分辨误差$x 相对应:
$x =
l b f ′l -l b f ′l 0=$ll b f ′
($l +l )l (12)得
$l =l 2
/l b f ′
$x
-l
(13)
由上式可见,增大基线长度l b 和接收透镜焦距f ′
将有利于提高任何物距l 时的测距精度。在系统结构尺寸固定后,PSD 位置分辨误差$x 是影响精度的主要因素,因此选用优质PSD 以提高控制电路精度非常重要。式(13)还表明,$l 与l 2
成正比,因此,该系统较适合于近距离、中距离物体的测距。参考文献:
[1]王兆远.照相机原理结构设计基础[M ].北京:机械工业出版社,1991.293-306.[2]冯华君.反射能量法测距对焦系统及其重叠设计法[J].光电工程,1998,25(2):48-53.
[3]Geng Z J.Rainbow 3dimensional camera :new concept of high-speed thr ee-dimensional vision sys-t em s [J ].Opt .Eng ,1996,35(2):376-383.
46
光电工程 第26卷第3期
红外线测距仪测量原理
红外线测距仪测量原理 测距仪是一种航迹推算仪器,用于测量目标距离,进行航迹推算。测距仪的形式很多,通常是一个长形圆筒,由物镜、目镜、测距转钮组成,用来测定目标距离。测距仪是根据光学、声学和电磁波学原理设计的,用于距离测量的仪器。 红外测距仪的分类有激光红外,红外和超声波三种,目前测距仪主要是指的激光红外测距仪,红外测距仪和超声波测距仪由于测量距离有限,测量精度很低目前已经被淘汰。激光红外测距仪是利用激光对目标的距离进行准确测定的仪器。激光红外测距仪在工作时向目标射出一束很细的激光,由光电元件接收目标反射的激光束,计时器测定激光束从发射到接收的时间,计算出从观测者到目标的距离。 测距仪有测量距离和测量精度,同时又是电子设备,所以品牌的选择非常重要,国际知名品牌的测距仪,在性能上会远优于杂牌的激光红外测距仪。 一.测距仪分类 测距仪从测距基本原理,可以分为以下三类: 1. 激光测距仪 激光测距仪是利用激光对目标的距离进行准确测定的仪器。激光测距仪在工作时向目标射出一束很细的激光,由光电元件接收目标反射的激光束,计时器测定激光束从发射到接收的时间,计算出从观测者到目标的距离。 激光测距仪是目前使用最为广泛的测距仪,激光测距仪又可以分类为手持式激光测距仪(测量距离0-300米),望远镜激光测距仪(测量距离500-20000米)。 目前市面上主流的都是激光测距仪,手持式激光测距仪全球前两大品牌是徕卡和博世,右图就是一款主流的手持式激光测距仪。 望远镜激光测距仪,为远距离激光测距仪,目前在户外使用相当广泛,望远镜激光测距仪全球前四大品牌是图雅得、博士能、奥尔法和尼康。四个品牌在产品上各有特点,2013年,美国激光技术杂志公布的数据,2013年全球单品销售冠军是图雅得SP1500,这款测距仪测量精准,反应速度快捷。 2. 超声波测距仪
红外检测及超声波检测基本原理
超声波检测障碍: 超声波测距具有测量精度高、指向睦强等诸多优点,故可采用超声波传感器来检测四旋翼飞行器运动方向的障碍。 超声波在空气中是以纵波的形式传播的,如果在传播过程中遇到障碍,超声波便会被反射回来。由于可以测得超声波从发射到遇到障碍然后被反射到发射点的时间,而且超声波在空气中传播的速度已知,我们可以根据这两项参数计算发射点与障碍之间的距离。如果超声波从发射,进而遇到障碍物被反射回来并接收之间的时间差为△t,那么阻挡物体距离发射点的距离d可以通过计算公式求得 式中,为超声波在空气中的传播速度,T为环境的摄氏温 度。 当四旋翼飞行器运动方向或某一分运动方向遇到障碍物时,超声波前后两次测量的距离会发生较大变化。本课题设定四旋翼飞行器能识别出距离差大于或等于40cm,四旋翼飞行器会执行相关的避障动作。 红外线检测障碍: 红外线是波长介于微波与可见光之间的电磁波,波长在770nm至lmm之间,是波长比红光长的非可见光。本设计通过红外发光二极管发射一束调制在特定频率上的红外光线,在遇到障碍物的时候反射回来,同时被红外接收二极管捕捉到,再送到特定的电路进行相应处理。 1.传感器比较 能实现视觉功能的传感器主要有以下几种: (1)利用CCD摄像头进行图像采集和识别,但不适用小体积系统的使用,并且涉及图像 采集与识别等领域。 (2)电容式接近传感器,基于检测对象表面靠近传感元件时的电容变化。 (3)超声波传感器,通过发射一束超声波,在遇到障碍物时反射回来后,根据超声波的 速度与时间差来计算与障碍物的距离。 (4)红外反射式光电传感器,它包括有固态发光二极管与的固态光敏二极管或光敏三极 管。 根据情况,红外反射式传感器与精确的测距系统不同,它只要感知物体的有无以及接近的程度,并且判断出简单的阈值及提供远近分档的距离。因此,使用较简单的接近传感器来实现避障功能是可行的。 2.特性及工作原理 反射式光电传感器的光源有多种,包括红外发光二极管,普通发光二极管,激光二极管等。前两种易受到外界光源的干扰,而第三种光的频率相对比较集中,只接收很窄的频率范围信号,抗干扰能力强但造价比较高。 在理想的情况下,光光电传感器需要处于发射的红外线经障碍物发射回来能被接收二极管接收到的区域,才能检测到周围的物体。同时,光的检测受到来自颜色,形状,光洁度及日光等不同因素的反射面的影响。因此,用发射与接收二极管,将受到外界干扰,不利于测量结果,但利用反射光强的测量方法可以提高测量的准确性和可靠性。它的原理是红外发射管发射经过调制的信号,然后由红外接收管接收。
sharp红外测距传感器
红外测距传感器:Sharp红外传感器的原理以及使用技巧 2009-02-23 21:20 在过去几年中,Sharp开发了很多种红外距离传感器。这些传感器不但体积小,功耗也很低。这篇文章就简单的介绍一下这些传感器的不同点,使用方法,接口方法以及一些使用上的小技巧。 工作原理: Sharp的红外传感器都是基于一个原理,三角测量原理。红外发射器按照一定的角度发射红外光束,当遇到物体以后,光束会反射回来,如图1所示。反射回来的红外光线被CCD检测器检测到以后,会获得一个偏移值L,利用三角关系,在知道了发射角度a,偏移距L,中心矩X,以及滤镜的焦距f以后,传感器到物体的距离D就可以通过几何关系计算出来了。
图1:三角测量原理 可以看到,当D的距离足够近的时候,L值会相当大,超过CCD的探测范围,这时,虽然物体很近,但是传感器反而看不到了。当物体距离D很大时,L值就会很小。这时CCD检测器能否分辨得出这个很小的L值成为关键,也就是说CCD 的分辨率决定能不能获得足够精确的L值。要检测越是远的物体,CCD的分辨率要求就越高。 非线性输出: Sharp GS2XX系列的传感器的输出是非线性的。没个型号的输出曲线都不同。所以,在实际使用前,最好能对所使用的传感器进行一下校正。对每个型号的传感器创建一张曲线图,以便在实际使用中获得真实有效的测量数据。下图是典型的Sharp GP2D12的输出曲线图。 图2:Sharp GP2D12输出曲线 从上图中,可以看到,当被探测物体的距离小于10cm的时候,输出电压急剧下降,也就是说从电压读数来看,物体的距离应该是越来越远了。但是实际上并不是这样的,想象一下,你的机器人本来正在慢慢的靠近障碍物,突然发现障碍
基于单片机的红外测距系统设计-开题报告
武汉大学珞珈学院本科生毕业论文(设计)开题报告 论文题目:基于单片机的红外测距系统设计 系:电子信息科学系学号: 20100802041 姓名:钱源 一、论文选题的目的和意义 红外线是不可见光,是电磁波的一种形式,可以用来进行距离的测量,其应用历史可以追溯到上世纪60年代。现代科学技术的发展进入了许多新领域,而在测距方面先后出现了激光测距、微波雷达测距、超声波测距及红外线测距。其中激光测距是靠激光束照射在物体上反射回来的激光束探测物体的距离。由于受恶劣的天气、污染等因素影响,使反射的激光束在一定功率上探测距离比可能探测的最大距离减少一半左右,损失很大,影响探测的精确度;微波雷达测距技术为军事和某些工业开发采用的装备和振荡器等电路部分价格昂贵,现在几乎还没有开拓民用市场;超声波测距在国内外已有人做过研究,由于采用特殊专用组件使其价格高,难以推广;红外线作为一种特殊的光波,具有光波的基本物理传输特性—反射、折射、散射等,且由于其技术难度相对不太大,构成的测距系统成本低廉,性能优良,便于民用推广。另外红外测距的应用越来越普遍。在很多领域都可以用到红外测距仪。红外测距一般具有精确度和分辨率高、抗干扰能力强、体积小、重量轻等优点,因而应用领域广、行业需求众多,市场需求空间大。 红外测距的研究就非常有意义了。红外线测距仪指的就是激光红外线测距仪,红外测距仪----用调制的红外光进行精密测距的仪器,测程一般为1-5公里。在100米以内则超声波测距更有优势,但是超声波测距的距离一般无法测量1米以内,而红外测距则可以这一段距离的不足,而且有着不错的精度,在本课题中研究的就是这一类情况的红外线测距。 二、国内外关于该论题的研究现状和发展趋势 (1)国内: 根据《国内近年来红外光电测距仪的发展情况》,随着国家对外开放政策的实施和测量工作的需要,近年来国内一些光学仪器厂和电子仪器厂分别从瑞典、瑞士和日本等国引进几种红外测距仪组装线,组装测距仪,我国有关工厂和院校近年来也研制出一些产品。由于微处理机在国产测距仪上的应用,大大缩小了仪器的体积,同时也减少了出故障的几率,使得国产测距仪的性能和质量都较过去有很大的提高。在国家“六·五”计划攻关中,常州第二电子仪器厂研制的DCHZ 型多功能红外测距仪就是一个很好的例证。该产品经国家测绘局测绘科学研究所光电测距仪检测巾心进行全面质量鉴定后认为:该仪器外型美观、体积小、重量
基于单片机的红外测距系统设计
武汉大学珞珈学院毕业论文 基于单片机的红外测距系统设计
摘要 现代科学技术的发展,进入了很多新领域,而在测距方面先后出现了激光测距、微波雷达测距、超声波测距及红外光测距。为了实现物体近距离、高精度的无线测量而采用了红外发射接收模块作为距离传感器,单片机作为处理器,编写A/D转换和显示程序,完成了一套便推式的红外距离测量系统,系统可以高精度的实时显示所测的距离,本系统结构简单可靠、体积小、测量精度高、方便使用。 红外测距的探测距离较短,一般在几十厘米之内,本文介绍的一种基于AT89C52单片机设计的红外测距仪,可以测量距离。 首先,在绪论中,介绍了红外线及红外传感器的分类和应用、AT89C52单片机的应用与说明以及MCP3001芯片的简介。其次,阐述了与红外测距的工作原理基本结构,对红外测距传感器也做了详细说明。再次,介绍了红外测距的硬件设计和软件设计。 在硬件设计中,介绍了红外测距实现的构想,给出红外测距硬件电路原理图,并说明了红外测距传感器、键盘、A/D转换电路、LCD显示电路工作原理及AT89C52单片机的管脚分配。在软件设计中,说明了整个程序流程及各程序设计的函数。最后,是对整个设计的结论,说明了红外测距实现的可行性。 关键词:红外测距 A/D转换实时显示红外线单片机
目录 第1章绪论 (1) 1.1 课题研究的背景和意义 (1) 1.2 本课题研究的热点及发展现状 (2) 1.3 本课题研究的目的 (2) 1.4 本课题研究的内容 (3) 第2章红外测距的工作原理与基本结构 (4) 2.1.方案及设计思想: (4) 2.2 红外测距系统的基本结构 (5) 第3章红外测距的硬件设计 (6) 3.1红外收发模块 (6) 3.2 A/D转换模块 (7) 3.3 LCD显示模块 (10) 3.4 AT89C52单片机概述 (11) 3.5整个红外测距系统显示 (13) 第4章红外测距的软件设计 (15) 4.1 程序流程图 (15) 第5章系统软硬件调试 (17) 5.1 硬件调试 (17) 5.2 软件调试 (17) 5.3测试结果绘图 (17) 5.4 调试中遇到的问题 (19) 结论 (20) 参考文献 (21) 附录 (1) 后记 (29)
超声波 红外避障
移动机器人的多传感器测距系统设计 一、引言 在自主移动机器人的实时避障和路径规划过程中,机器人须依赖于外部环境信息的获取,感知障碍物的存在,测量障碍物的距离。目前,机器人避障和测距传感器有红外、超声波、激光及视觉传感器。激光传感器和视觉传感器价格贵,对控制器的要求较高,因而,在移动机器人系统中多采用红外及超声波传感器。 多数系统采用单一传感器进行信息采集,但超声波传感器因为存在测量盲区的问题,测距范围一般在30~300cm之间;而红外测距传感器的探测距离较短,一般在几十厘米之内,它可以在一定程度上弥补超声波传感器近距离无法测量的缺点。因而,本系统采用多路红外和超声波传感器进行距离信息的测量和采集。 二、测距原理及方法 (一)超声波传感器 超声波是指谐振频率高于20 Hz的声波,频率越高反射能力越强。超声波传感器价格低廉,其性能几乎不受光线、粉尘、烟雾、电磁干扰的影响,并且,金属、木材、混凝土、玻璃、橡胶和纸等可以反射近乎100%的超声波,因而,可以用来探测物体。超声波测距的方法为回声探测法,发射换能器不断发射声脉冲,声波遇到障碍物后反射回来被接收换能器接收,根据声速及时间差计算出障碍物的距离。距离与声速、时间的关系表示为 式中:s为与障碍物间的距离,m; c为声速,m/s;t为第一个回波到达的时刻与发射脉冲时刻的时间差,s。 c与温度有关,空气中声速与温度的关系可表示为
式中c为声速,m/s;θ为环境温度,℃。 (二)提高超声波测距精度的方法 1.采用合适的频率和波长:使用超声波传感器测距,频率取得太低;外界杂音干扰较多;频率取得太高,在传播过程中衰减较大。并且,超声波传感器在测量过程中容易产生盲区,接收端易接收到泄漏波。改善这一缺点,须减少发射波串的长度,增高发射波频率。但发射波串长度过短会使得发射换能器不能被激振或激振达不到最大值;发射波频率过高则衰减大,作用距离下降、有试验表明:使用40 kHz的超声波,发射脉冲群含有10-20个脉冲,具有较好的传播性能。 2.提高系统的计时精度也可提高超声波的测距精度,计时器的计数频率越高,则由于时间的量化误差所引起的测距误差就越小。 3.对系统电路的时间延迟进行补偿可以减小测距误差,提高测距精度。延迟时间 式中△t为延迟时间,s;s1,s2为2个已知的测量距离,m;t1,t2为对应的测量时间,s。 (三)红外避障传感器 红外线是介于可见光和微波之间的一种电磁波,因此,它不仅具有可见光直线传播、反射、折射等特性,还具有微波的某些特性,如较强的穿透能力和能贯穿某些不透明物质等。红外传感器包括红外发射器件和红外接收器件。自然界的所有物体只要温度高于绝对零度都会辐射红外线,因而,红外传感器须具有更强的发射和接收能力。 红外传感器的的测距基本原理为发光管发出红外光,光敏接收管接收前方物体反射光,据此判断前方是否有障碍物。根据发射光的强弱可以判断物体的距离,它的原理是接收管接收的光强随反射物体的距离而变化的,距离近则反射光强,距离远则反射光弱。 目前,使用较多的一种传感器-红外光电开关,它的发射频率一般为38 kHz左右,探测距离一般比较短,通常被用作近距离障碍目标的识别。本系统采用的即为此种传感器。 (四)红外测距的缺陷
红外测距防撞系统
基本原理 红外线发射器不断发射出频率为40 kHz 的红外线,经障碍物反射,红外线接收器接收到反射波信号,并将其转变为电信号。测出发射波与接收到反射波的 时间差t ,即可求出距离s : s =12 ct (1) 式中, c 为光速度,一般取3 ×108 m/ s。本文采用“计数”方式,通过单片机处理进行测量,其基本原理是:红外线发射器始终处于发射红外线的状态,当红外接收器第一次接收到障碍物反射回的红外线时,经电路处理单片机给出一个计数启动信号,单片机的计数器开始以一定频率计数;当红外线接收器第二次接收到反射回的红外线时,经电路处理单片机给出一个停止计数脉冲,计数器停止计数。通过编程,单片机自动处理,用脉冲的周期T 乘以脉冲数n 就得到发射 红外线到接收红外线的时间差t ,即: t = nT (2) (2) 式代入(1) 式就得测量距离。 系统的建立 根据以上的测距原理,设计出系统的基本框图如图1 图1 红外线测距系统基本框图 红外发射电路发射出40 kHz 频率的红外线,当遇到障碍物红外线发生漫反射,红外线接收电路第一次接收到反射的红外线时,给单片机一个信号脉冲,启动单片机内的计数器,计数器置位进入计数状态;当接收电路第二次接收到反射器的红外线时,经单片机处理给出一个信号脉冲,使计数器停止计数,数据被锁存,然后经单片机处理,将测量的距离显示在显示器上。 基本特点 本文研究的汽车红外防撞系统吸收了国内外各种测距仪的部分特点,结合我国汽车电子工业发展方向和现有电子技术基础上而设计出来的,具有以下特点: 1) 汽车在行进中能自动连续跟踪显示障碍物的距离; 2) 在交通量较大的高速公路的车间距离一般为30~50 m ,本装置设置极限全距离为30 m , 当探测的车间距为30 m 时,发出警告声提醒驾驶员注意刹车; 3) 探测的车间距为20 m 时,给出自动刹车信号; 若装有自动刹车装置,则自动刹车减速。
实验二红外测距传感器实验
信息工程学院实验报告 课程名称: 传感器原理及应用 实验项目名称: 实验二 红外测距传感器实验 实验时间: 班级: 姓名: 学号: 一、实 验 目 的 1. 学习 CC2530 单片机 ADC 模块的使用。 2. 学习红外测距传感器的使用。 二、实 验 原 理 1. CC2530 节点与红外测距传感器的硬件接口 红外线测距传感器模块GP2Y0A21YK0F
(1). 红外测距传感器模块(GP2Y0A21YK0F)引脚 OUT:模拟量输出接口(AD 模块) GND:外接GND VCC:数字量输出接口(0 和1) 外接5V 电源 (2). 传感器模块与CC2530 模块之间的连接 2. ADC (1). 简介 CC2530单片机的ADC支持多达14位的模拟数字转换,具有多达12位的ENOB(有效数字位)。它包括一个模拟多路转换器,具有多达8个各自可配置的通道;以及一个参考电压发生器。转换结果通过DMA写入存储器。还具有若干运行模式。ADC模块的方框图如下所示: ADC的主要特性如下:
●可选的抽取率,这也设置了分辨率(7到12位) ●8个独立的输入通道,可接受单端或差分信号 ●参考电压可选为内部单端、外部单端、外部差分或A VDD5 ●产生中断请求 ●转换结束时的DMA触发 ●温度传感器输入 ●电池测量功能 (2). 寄存器简介 本次实验中主要涉及到ADC模块的寄存器:
数据的换算: 例如:在CC2530 中配置ADC 的参考电压为A VDD5(3.3V),抽取率为512(12 位有效数据),由于在实验中采用单端转换方式,所以实际数据只有11 位。这时,ADC 采集到的数据记为x,则 ADC采集数据转换为电压(单位:V):V = x * 3.3 / 2048 3. GP2Y0A21YK0F 红外测距传感器 (1). 概述 夏普GP2Y0A21YK0F 测距传感器是基于PSD 的微距传感器,其有效的测量距离在80cm 内,有效的测量角度大于40 度,输出信号为模拟电压,在0 到8cm 左右的范围内与距离成正比非线性关系,在10-80cm 的距离范内成反比非线性关系,平均功耗为30mA,反应时间约为5ms,并且对背景光及温度的适应性较强。GP2Y0A21YK0F 传感器的默认的测距分辨率为1mm。
红外测距传感器的工作原理及使用
光电检测技术与应用 论文 题目:红外测距传感器的工作原理及使用 院系:机电工程学院 班级:测控xxxx 完成日期:2017/5/6 小组:第x组 小组成员:xxxxxxxxxx 红外测距传感器的工作原理及使用 摘要: 利用光的反射性质,将光学系统与电路系统相结合可以制作避障传感器,通过单片机的控制,可以完成智能车在运行过程中,对障碍物的处理。避障传感器基本原理:利用物体的反射性质。在一定范围内,如果没有障碍物,发射出去的红外线,因为传播距离越远而逐渐减弱,最后消失。如果有障碍物,红外线遇到障碍物,被反射到达传感器接收头。传感器检测到这一信号,就可以确认正前方有障碍物,并送给单片机,单片机进行一系列的处理分析,协调车轮或者舵机工作,完成躲避障碍物的动作。 关键字:光电检测技术、智能车、测距、红外测距传感器、单片机 一、引言 光电检测作为光学与电子学相结合而产生的一门新兴检测技术,主要包括光信息获取、光电变换、光信息测量以及测量信息的智能化处理等,具有精度高、速度快、距离远、容量大、非接触、寿命长、易于自动化和智能化等优点,在国民经济各行业中得到了迅猛的发展和广泛的应用,如光扫描、光跟踪测量,光纤测量,激光测量,红外测量,图像测量,微光、弱光测量等,是当前最主要和最具有潜力的光电信息技术。
二、光电检测技术的概念 光电检测技术是光学与电子学相结合而产生的一门新兴检测技术。它主要利用电子技术对光学信号进行检测,并进一步传递、储存、控制、计算和显示。光电检测技术从原理上讲可以检测一切能够影响光量和光特性的非电量。它可通过光学系统把待检测的非电量信息变换成为便于接受的光学信息,然后用光电探测器件将光学信息量变换成电量,并进一步经过电路放大、处理,以达到电信号输出的目的。然后采用电子学、信息论、计算机及物理学等方法分析噪声产生的原因和规律,以便于进行相应的电路改进,更好地研究被噪声淹没的微弱有用信号的特点与相关性,从而了解非电量的状态。微弱信号检测的目的是从强噪声中提取有用信号,同时提高测系统输出信号的信噪比。 光电检测技术的系统机构比较简单,分为信号的处理器,受光器,光源。在实际检测过程中,受光器在获得感知信号后,就会被反映为不同形状、颜色的信号,同时根据这些器件所处在的不同位置,就能够将他分为反射型与透过型的两种比较的模式。光电检测的媒介光应当是自然的光,例如白炽灯或者萤光灯。特别是随着这些技术的发展,光电技术也取得的非常好发展。由于投光器在发出光后,会以不一样的方式触摸这些被检测物中,直到照射到检测系统中的受光器中,同时受光器在此刺激下,会产生一定量的电流,这就是我们常说的光敏性的原件,实际生活中应用比较广泛的有三极管、二极管。 三、光电检测技术的应用 智能车方面的应用、家庭扫地机器人方面的应用:利用光的反射性质,将光学系统与电路系统相结合可以制作避障传感器,通过单片机的控制,可以完成智能车在运行过程中,对障碍物的处理。避障传感器基本原理:利用物体的反射性质。在一定范围内,如果没有障碍物,发射出去的红外线,因为传播距离越远而逐渐减弱,最后消失。如果有障碍物,红外线遇到障碍物,被反射到达传感器接收头。传感器检测到这一信号,就可以确认正前方有障碍物,并送给单片机,单片机进行一系列的处理分析,协调车轮或者舵机工作,完成躲避障碍物的动作。 四、常用光电检测器件:红外测距传感器 原理:其输出为电压数值,通过公式L?=?(6762/(9-X))-4可计算出小车与障碍物之间的距离。
超声波测距设计
第一章绪论 1.1测量的概念 测量是按照某种规律,用数据来描述观察到的现象,即对事物作出量化描述。测量是对非量化实物的量化过程。 1.2测量的分类 从不同观点出发,可以将测量方法进行不同的分类,常见的方法有: 1、直接测量、间接测量和组合测量 直接测量是将被测量与与标准量进行比较,得到测量结果。 间接测量是测得与被测量有一定函数关系的量,然后运用函数求得被测量。 组合测量是对若干同名被测量的不同组合形式分别测量,然后用最小二乘法解方程组,求得被测量。 2、绝对测量、相对测量 绝对测量是所用量器上的示值直接表示被测量大小的测量。 相对测量是将被测量同与它只有微小差别的同类标准量进行比较,测出两个量值之差的测量法。 3、接触测量、非接触测量 这是从对被测物体的瞄准方式不同加以区分的。接触测量的敏感元件在一定测量力的作用下,与被测物体直接接触,而非接触测量敏感元件与被测对象不发生机械接触。 4、单项测量与综合测量 单项测量是对多参数的被测物体的各项参数分别测量,综合测量是对被测物体的综合参数进行测量。 5、自动测量和非自动测量 自动测量是指测量过程按测量者所规定的程序自动或半自动地完成。非自动测量又叫手工测量,是在测量者直接操作下完成的。 6、静态测量和动态测量 静态测量是对在一段时间间隔内其量值可认为不变的被测量的测量。动态测量是为确定随时间变化的被测量瞬时值而进行的测量。 7、主动测量与被动测量
在产品制造过程中的测量是主动测量,它可以根据测量结果控制加工过程,以保证产品质量,预防废品产生。 被动测量是在产品制造完成后的测量,它不能预防废品产生,只能发现边挑出废品。 1.3测量技术的发展趋势 近年来,精密测量技术发展迅速,成果喜人。例如在线测量技术,已可进行加工状态的实时测量与显示,及时检测加工是否出现异常状况,从而可大幅度提高生产效率。 在高精度加工和质量管理过程中,随着光机电一体化、系统化的发展,光学测量技术有了迅速发展,相应的测量机产品大量涌现,测量软件的开发也日益受到重视。 随着非接触、高效率测量机的大量出现,专家预计,21世纪测量技术的发展方向大致如下: (1)测量精度由微米级向纳米级发展,测量分辨力进一步提高; (2)由点测量向面测量过渡(即由长度的精密测量扩展至形状的精密测量),提高整体测量精度; (3)随着图像处理等新技术的应用,遥感技术在精密测量工程中将得到推广和普及;(4)随着标准化体制的确立和测量不确定度的数值化,将有效提高测量的可靠性。 总之,测量技术必须实现高精度化,同时也要XX现高速化和高效率化,因此,非接触测量和高效率测量也必然成为新世纪精密测量技术的重要发展方向。 面向21世纪的我国工程测量技术的发展趋势和方向是:测量数据采集和处理的自动化、实时化、数字化;测量数据管理的科学化、标准化、规格化;测量数据传播与应用的网络化、多样化、社会化。GPS技术、RS技术、GIS技术、数字化测绘技术以及先进地面测量仪器等将广泛应用于工程测量中,并发挥其主导作用。 1.4超声波测距的定义和内容 1.4.1超声波测距的定义 由于超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而超声波经常用于距离的测量,如测距仪和物位测量仪等都可以通过超声波来实现。利用超声波检测往往比较迅速、方便、计算简单、易于做到实时控制,并且在测量精度方面能达到工业实用的要求。 1.4.2超声波测距的内容 超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空
基于单片机的红外测距系统设计 - 副本
北京联合大学应用科技学院 实训报告 基于单片机的红外测距系统设计 系别电子 专业电子信息工程技术 年级12级02班 组长:张祎楠2012191294068 组员:殷跃2012191294070 白雨童2012191294063
目录 第1章绪论 (1) 1.1 本课题研究的目的 (1) 1.2 本课题研究的内容 (1) 13整个红外测距系统显示 (4) 第2章红外测距的软件设计 (5) 后记 (6)
第1章绪论 1.3 本课题研究的目的 我们所进行的课题便是做一个简易的,精确的,近距离的距离检测仪,这也是对我们所学知识的一种考验方法,从中我们可以更系统的认识单片机,了解AD转换和红外收发模块。 1.4 本课题研究的内容 红外传感器的测距基本原理为:红外发射电路的红外发光管发出红外光,红外接收电路的光敏接收管接收发射光,根据发射光的强弱判断出所测的距离。由于接收管接收的光强度是随着发光管与测量物的距离变化而变化的,因而,与测量物的距离近则接收光强,距离远则接收光弱。 具体方法如图1所示,红外模块发出并接收到红外线信号;AD转换模块将接收到的模拟信号转换成数字信号再交给单片机, 启动单片机中断程序,此时单片机得到数字信号也就是电压值,再由软件进行判别、计算,得出距离数并送给LED/LCD显示。 红外模块 电压距离公式 AD模块 单片机 显示模块 图1.1 反射能量法原理
图3.7 protues中整体系统 单片机AT89C52左端分别接了时钟电路和复位电路,这是单片机最小的系统。XTAL1和XTAL2串连一个晶振,并且分别接上一个20p的电容,两个电容另一端都接地,构成时钟电路。RST同时接上100p电容,4脚按键,1k电阻,4脚按键另一端接上一个1k电阻再与100p电容并联接VCC,1k电阻另一端则接地,构成复位电路。 单片机AT89C52右端P0端同时接LED的D1-D7端口和排阻,P2.0接CLK,P2.1接DO,P2.2接CS,P2.5接E,P2.6接RW,P2.7接RS。 MCP3001的VREF接vcc,IN+接红外距离传感器的Vo。 软件程序 #include
超声波传感器及超声波测距
超声波传感器及超声波测距 摘要:介绍了一种基于AT89C52单片机的超声波测距系统,由555和运放及比较器配合超声波传感器有效组成了超声波的发射电路和接收电路。同时在数据处理,盲区消隐方面提出了有效解决方法! 从而提高了检测的精度及灵敏度,以及用LCD液晶显示器配合美妙的音乐进行显示。本文主要阐述了超声测距系统的硬件电路构成、工作原理及软件设计方法。该系统硬件结构简单、工作可靠,有良好的测量精度和灵敏度。 [关键字] 超声波测距 LCD液晶
前言 随着科技的迅猛发展越来越多科技成果被广泛的运用到人们的日常生活当中,给我们的生活带来了诸多方便。这一设计就是本着这个宗旨出发,利用超声波的特性来为我们服务。 人们能听到声音是由于物体振动产生的,它的频率在20HZ-20KHZ范围内,超过20KHZ称为超声波,低于20HZ的称为次声波。常用的超声波频率为几十KHZ-几十MHZ。由于超声波指向性强,因而常于距离的测量。利用超声波检测往往比较迅速、方便、计算简单、易于做到实时控制,并且在测量精度方面能达到工业实用的要求,因此在移动机器人,汽车安全,海洋测量等上得到了广泛的应用。本设计提供一种液晶显示测距装置,该装置利用了发射接收一体化的超声波传感器和微处理器。采用超声波传感器分时工作于发射和接收,利用声波在空气中的传播速度和发射脉冲到接收反射脉冲的时间间隔计算出障碍物到超声波测距器之间的距离。 距离是在不同的场合和控制中需要检测的一个参数,所以,测距就成为数据采集中要解决的一个问题。尽管测距有多种方式,比如,激光测距,微波测距,红外线测距和超声波测距等。但是,超声波测距不失为一种简单可行的方法。虽然超声波测距电路多种多样,甚至已有专用超声波测距集成电路。但是,有的电路复杂,技术难度大,有的调试困难,有的元件不易购买。本文介绍的电路,成本低廉,性能可靠,所用元件易购,并且利用测距原理,结合单片机的数据处理,使测量精度提高,电路实现容易,无须调试,工作稳定可靠。
基于STM32的红外测距系统设计学士学位论文
基于STM32的红外测距系统设计 摘要 随着现代科学技术的发展,出现了很多新的领域,为了实现对物体近距离、高精度的无线测量,本论文对红外测距领域进行了研究。本论文采用单片机作为处理器,编写A/D转换程序及LCD显示程序,红外传感器作为工作模块,完成一套高精度显示、实时测量的红外测距系统。本系统结构简单、体积小、测量精度高、成本低、方便使用。 本论文所介绍的是一种基于STM32单片机并运用日本夏普公司型号为GP2Y0A21的红外传感器所设计的红外测距系统。首先,介绍红外线及红外传感器的分类及应用、STM32单片机的简介与功能;其次,阐述红外测距系统工作原理及基本结构并对单片机、红外传感器、LCD液晶显示屏的工作电路做了介绍;再次,对系统进行了整体设计构想,先后对系统硬件及软件进行设计,并对整个系统的功能进行了调试。最后对整个设计进行总结,说明红外测距系统实现的可行性。 关键词红外测距;单片机;A/D转换;LCD
STM32-based infrared ranging system design Abstract With the development of modern science and technology, there are many new areas, in order to achieve the object close range, high-precision wireless measurement,this topic of infrared ranging is studied. This topic using SCM as the processor, to write A/D converter and LCD display program, an infrared sensor as a working module, complete set of precision display, real-time measurement of infrared ranging system. This system has the advantages of simple structure, small size and high accuracy, low cost and convenient use. This paper introduced is based STM32 microcontroller and use of Japan's Sharp Corporation model GP2Y0A21 infrared sensor designed infrared ranging system. Firstly, introduce the classification and application of infrared distance measurement,it also introduces the function of STM32 microcontroller. Then illustrate the work theory and basic structure of it and introduce the LCD screen and work circuit. Again, the system has carried on the overall design idea, successively on the system hardware and software design, and probes into the function of the whole system debugging. Finally, summarize the entire design to illustrate the feasibility of infrared distance measurement. Keywords Infrared range, SCM, A/D converter, LCD
测距传感器分类特点
测距传感器编辑 本词条缺少信息栏、名片图,补充相关内容使词条更完整,还能快速升级,赶紧来编辑吧!超声波传感器是利用超声波的特性研制而成的传感器。超声波是一种振动频率高于声波的机械波,由换能晶片在电压的激励下发生振动产生的,它具有频率高、波长短、绕射现象小,特别是方向性好、能够成为射线而定向传播等特点。 目录 1分类 2原理 3应用 1分类 编辑 超声波测距传感器 激光测距传感器 红外线测距传感器 24GHZ雷达传感器 2原理 编辑 超声波测距传感器原理: 超声波对液体、固体的穿透本领很大,尤其是在阳光不透明的固体中,它可穿透几十米的深度。超声波碰到杂质 24GHZ雷达传感器RFbeam 或分界面会产生显著反射形成反射成回波,碰到活动物体能产生多普勒效应。因此超声波检测广泛应用在工业、国防、生物医学等方面以超声波作为检测手段,必须产生超声波和接收超声波。完成这种功能的装置就是超声波传感器,习惯上称为超声换能器,或者超声探头。激光测距传感器工作原理: 激光传感器工作时,先由激光二极管对准目标发射激光脉冲。经目标反射后激光向各方向散射。部分散射光返回到传感器接收器,被光学系统接收后成像到雪崩光电二极管上。雪崩光电二极管是一种内部具有放大功能的光学传感器,因此它能检测极其微弱的光信号。记录并处理从光脉冲发出到返回被接收所经历的时间,即可测定目标距离。激光传感器必须极其精确地测定传输时间,因为光速太快。 红外线测距传感器工作原理: 红外测距传感器利用红外信号遇到障碍物距离的不同反射的强度也不同的原理,进行障碍物远近的检测。红外测距传感器具有一对红外信号发射与接收二极管,发射管发射特定频率的红外信号,接收管接收这种频率的红外信号,当红外的检测方向遇到障碍物时,红外信号反射回来被接收管接收,经过处理之后,通过数字传感器接口返回到机器人主机,机器人即可利用红外的返回信号来识别周围环境的变化 24GHZ雷达测距传感器原理: FSK测运动物体[1] FMCW测静止和运动物体 [1]
基于stm32的超声波测距系统
湖北民族学院 信息工程系 课程设计报告书 题目: 基于nrf24l01的超声波测距系统 课程:单片机课程设计 专业:电子信息 班级: 03114 学号: 03114 学生姓名: 指导教师: 2014年5月3日
信息工程学院课程设计任务书 学号 03114 学生姓名专业(班级)电子信息设计题目基于nrf24l01的超声波测距系统 设计技术参数STM32F103VET6单片机,vcc 5v 、 72mhz 、spi端口、lcd显示屏Hcsr04模块 nrf24l01 设计要求通过超声波测距磨块测量小于4米的距离,测量精度0.5cm。并且通过无线传输模块实现数据的无线通信。 工 作 量 5000字 工作计划前期完成资料的选取阶段,后期进行技术分析然后进行程序的编写和代码的相关调试;最后对系统进行完善整理资料编写报告。 参考资料电子技术基础(数字部分),康华光主编,高等教育出版社 电子技术基础(模拟部分),康华光主编,高等教育出版社 李士雄,丁康源主编,数字集成电子技术教程,高等教育出版社 周良权方向乔编《数字电子技术基础》高等教育出版社 陈小虎主编《电工电子技术》高等教育出版社 李朝青,刘艳玲单片机原理及接口技术(第4版)北京航空航天大学出版社 指导教师签字教研室主任签字 2014年5月3日
信息工程系课程设计成绩评定表 学生姓名:学号:03 专业(班级):电子信息 课程设计题目:基于nrf24l01的超声波测距系统 成绩: 指导教师: 年月日
摘要 本系统是基于无线通信模块的一个超声波测距系统具有4米范围内的有效距离测量。采用nrf24l01无线通信模块可在2米的范围内实现有效通信科信控制部件采用stm32f103vet6单片机可实现高速转换便于实时距离转换测试。Hcsr04超声波测距系统实现精度0.5cm的距离测量 关键词:nrf24l01、m3、Hcsr04。
红外测距
红外测距系统的基本结构 该系统主要由红外发射电路、红外接收电路、A/D转换电路,AT89C52芯片、键盘接口电路及LCD显示电路等组成。其组成框图如图所示 红外测距系统工作流程 在整个红外测距系统工作中,当系统被接入启动电源后,首先,对STM32单片机进行初始化,当单片机接收到红外传感器 GP2Y0A21传输的模拟电压信号后,经过A/D转换电路,将输入单片机的模拟电压信号Vout转换为单片机可识别的数字信号,并经过电压距离转换程序,转换出要测量的距离,然后通过10次均值滤波来提高测量的精确度,最后在通过液晶显示屏LCD显示出测量结果。 为了实现红外测距,在硬件设计中,我们可以使红外发射驱动电路驱动发射头的红外二极管发出红外光,当红外光由红外接收驱动电路驱动红外接收头的光敏二极管接收到,并通过电压转换,将其转换为可测量的电压值,因为红外光的强度会随距离的缩小而增强,红外接收电路转化的电压值会随之增强。又因为电压与距离成比例,通过对转换的电压的计算,我们可以知道红外发射模块与接收模块的距离。我们采用LCD 显示屏动态显示变化中的距离, LCD显示器与AT89C52芯片的P0口与P2.0-2.2接口相接,在红外接收模块运动过程,AT89C52芯片内部会将电压模拟量通过A/D转换将其转化为可显示的数字量,然后通过LCD显示器显示出。通过键盘接口可以实现距离的测量与面积的计算。
系统硬件结构电路图 红外测距的硬件设计红外收发模块 红外发送管是用于发送信号,经过障碍物将信号反射,红外接收管接收到反射回来的信号,然后根据信号强弱将对应的电压值显示在显示模块上,并将此时的距离记录下来。然后整改程序,用红外收发模块进行测距,就可在显示模块上显示出红外接收管接收的 信号强度对应的距离值。 如图所示GP2Y0A02YK0F有3个端口,其中VCC接信号输入,VO接MCP3001的IN+,GND接地线。GP2Y0A02YK0F测量范围在20cm-150cm之间,测量误差小于0.5cm。是一个距离测量传感器单元,PSD的集成组合构成(位置敏感探测器),IRED(红外发光二极管)和信号原理电路。由于采用三角测量方法,各种物体的反射率,对环境 温度和工作时间距离检测不容易产生影响。 复位系统 单片机复位系统就是让程序计数器回到0000h这个地址,程序重头开始执行,将一些 寄存器、存储单元都置为初始设定值,单片机复位的形式有很多种,比如上电复位、 看门狗复位、手动复位等等。本开发板运用的是外接电路来手动复位,如图8所示,STM32单片机采用低电平复位,使复位开关RESET按下单片机接入低电平即完成复位操作。 A/D转换模块 A/D 转换器按照转换的原理可分为直接A/D 转换器和间接A/D 转换器两种类型。直接A/D 转换器,就是把模拟信号直接转换成数字信号,比如逐次逼近型。间接A/D 转换
红外测距传感器的原理与设计最终版
红外测距传感器的原理与设计 摘要:现代科学技术的发展,进入了许多新领域,而在测距方面先后出现了激光测距、微波雷达测距、超声波测距及红外线测距。为了实现物体近距离、高精度的无线测量,我采用红外发射接收模块作为距离传感器,单片机作为处理器,编写A/D转换、显示以及与PC机的通信程序,开发了一套便推式的红外距离测量系统,系统可以高精度的实时显示所测的距离,并且可以将距离量通过串口发送到PC机显示处理、本系统结构简单可靠、体积小、测量精度高、方便使用,另外本系统形成了一套完善的软硬件开发平台,可以进行扩展、移植和做进一步的开发。 关键词:红外测距;68HC11E1;A/D转换;
Principle and design of the infrared distance sensor Abstract:The development of modern science and technology, into many new areas, has a laser The development of modern science and technology, into many new areas, has a laser range finder in the ranging aspects, ranging of microwave radar, ultrasonic ranging and infrared ranging. In order to achieve the objects at close range, high-precision wireless measurement, I used the infrared transmitter receiver module as the distance sensor, microcontroller as the processor to write the A / D conversion, display and communication with the PC program, developed a will to push infrared distance measurement systems, high-precision real-time system can display the measured distance, and distance measuring can be sent through the serial port to a PC display processing, the system structure is simple and reliable, small size, high accuracy, ease of use, while this system the formation of a complete set of hardware and software development platform can be extended, transplantation, and further development. Key words:Infrared distance; 68HC11E1; A / D conversion;