一种基于PWM的电压输出DAC电路设计
DAC0832的波形发生器(汇编)
ORG 0000H KB:MOV P1,#0FFH;置P0口为输入方式MOV A,P1;读键值 CPL A ANL A,#1FH;屏蔽高三位 JZ KB;无键闭合继续检测 ACALL DL Y_10MS;延时10ms,去抖动MOV A,P1;再次检测有无键闭合 CPL A ANL A,#1FH JZ KB CJNE A,#01H,KB01 LCALL FANGBO;调用方波子程序SJMP KB KB01:CJNE A,#02H,KB02 LCALL JVCHI;调用锯齿波子程序SJMP KB KB02:CJNE A,#04H,KB03 LCALL TIXING;调用梯形波子程序SJMP KB KB03:CJNE A,#08H,KB04 LCALL SANJIAO;调用三角波子程序SJMP KB KB04:CJNE A,#10H,KB LCALL ZHENGXIAN;调用正弦波子程序SJMP KB ;方波子程序////////////// FANGBO: MOV DPTR,#0FFFEH LP1: MOV A,0 MOVX @DPTR,A LCALL DELAY1 MOV A,#0FFH MOVX @DPTR,A LCALL DELAY1 AJMP LP1 ;锯齿波子程序///////////// JVCHI: MOV DPTR,#0FFFEH MOV A,#0FFH WW:MOVX @DPTR,A DEC A NOP
NOP NOP AJMP WW ;梯形波子程序 TIXING: MOV DPTR,#0FFFEH MOV R2,#07DH MOV R4,#0AFH MOV A,#00H D1:MOVX @DPTR,A LCALL DELAY2 ADD A,R2 DJNZ R4,D1 AJMP D1 ;三角波子程序/////////////// SANJIAO: MOV DPTR,#0FFFEH MOV R6,#10H MOV A,#00H LOOP1: MOVX @DPTR,A ADD A,R6 CJNE A,#0FFH,LOOP1 LOOP2: MOVX @DPTR,A SUBB A,R6 CJNE A,#07H,LOOP2 AJMP LOOP1 ;正弦波子程序///////////////// ZHENGXIAN: MOV R1,#00H QZ:MOV A,R1 MOV DPTR,#SETTAB MOVC A,@A+DPTR MOV DPTR,#0FFFEH MOVX @DPTR,A INC R1 AJMP QZ ;延时程序2 DELAY2:MOV 31H,#02H PW:DJNZ 31H,PW RET ;延时子程序1 DELAY1: MOV 30H,#0FFH
输出占空比可变地PWM波形
DSP原理及应用大作业输出占空比可变的PWM波形
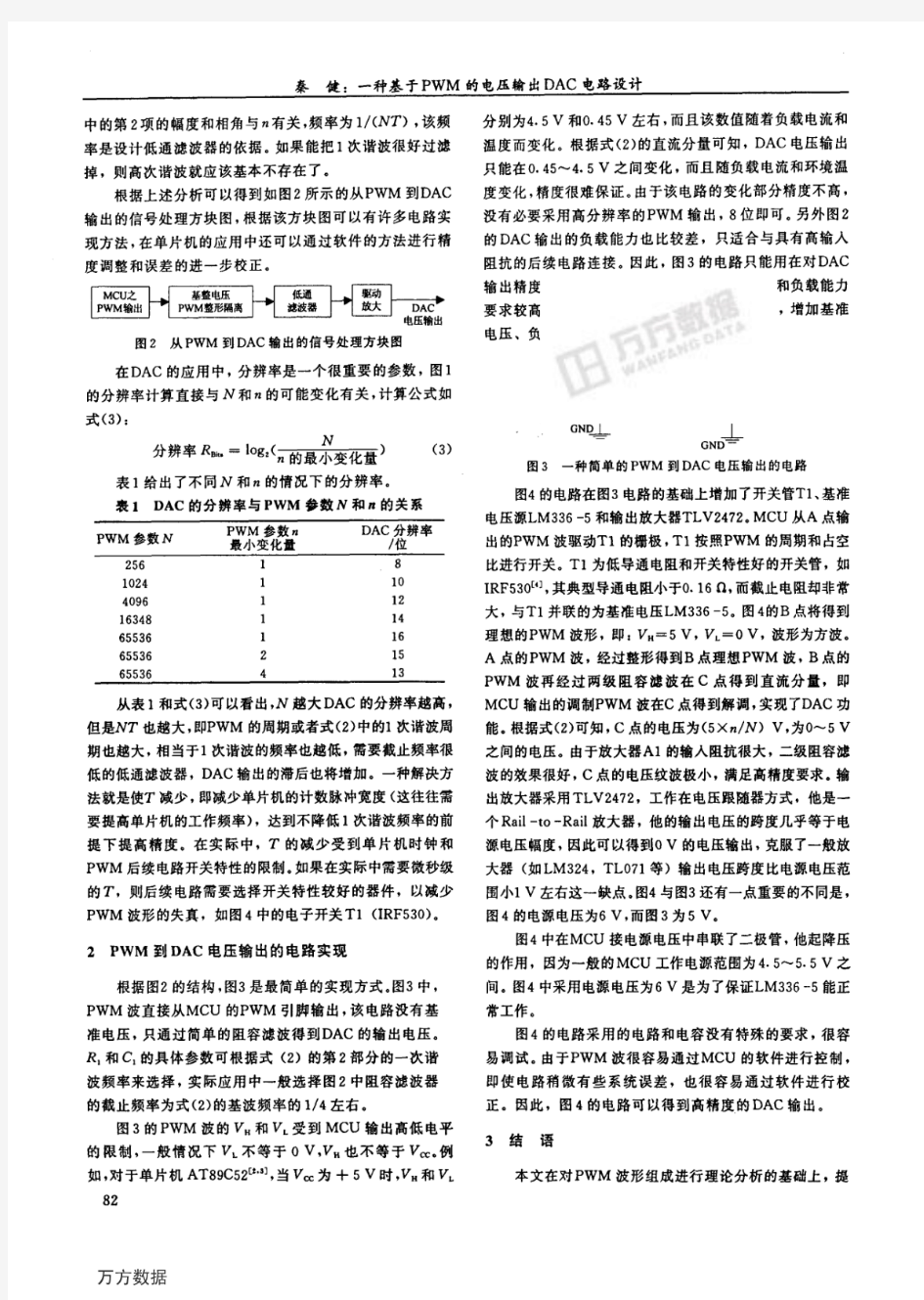
输出占空比可变的PWM波形 任务目的 1. 掌握CCS集成开发环境的调试方法; 2. 掌握C/C++语言与汇编混合编程; 3. 熟悉CCS集成开发环境,掌握工程的生成方法; 4. 掌握如何输出占空比可变的PWM波形 5. 了解PWM波形产生的原理和应用 任务内容 1. 通过学习课本和查询课外资料了解空间矢量PWM产生的原理; 2. 利用CCS集成开发环境,建立工程,完成DSP汇编源文件的建立和编写, 实现对称空间矢量PWM波形生成,在该程序中,利用定时器1ms中断来实现每隔1s改变1次CMPR1; 3. 编译并且在片外区通过连接示波器运行得出正确结果,利用示波器观察波 形 任务原理 1.PWM的原理 脉宽调制(PWM)基本原理:控制方式就是对逆变电路开关器件的通断进行控制,使输出端得到一系列幅值相等的脉冲,用这些脉冲来代替正弦波或所需要的波形。也就是在输出波形的半个周期中产生多个脉冲,使各脉冲的等值电压为正弦波形,所获得的输出平滑且低次谐波少。按一定的规则对各脉冲的宽度进行调制,即可改变逆变电路输出电压的大小,也可改变输出频率。 例如,把正弦半波波形分成N等份,就可把正弦半波看成由N个彼此相连的脉冲所组成的波形。这些脉冲宽度相等,都等于∏/n ,但幅值不等,且脉冲顶部不是水平直线,而是曲线,各脉冲的幅值按正弦规律变化。如果把上述脉冲序列用同样数量的等幅而不等宽的矩形脉冲序列代替,使矩形脉冲的中点和相应正弦等分的中点重合,且使矩形脉冲和相应正弦部分面积(即冲量)相等,就得到一组脉冲序列,这就是PWM波形。可以看出,各脉冲宽度是按正弦规律变化的。根据冲量相等效果相同的原理,PWM波形和正弦半波是等效的。对于正弦的负半周,也可以用同样的方法得到PWM波形。 在PWM波形中,各脉冲的幅值是相等的,要改变等效输出正弦波的幅值时,只要按同一比例系数改变各脉冲的宽度即可,因此在交-直-交变频器中,PWM 逆变电路输出的脉冲电压就是直流侧电压的幅值。根据上述原理,在给出了正弦
单片机控制dac0832输出正弦波三角波汇编程序
单片机控制DAC0832输出正弦波三角波汇 编程序 org 0000h LJMP MAIN ORG 0003H LJMP L0 MAIN:MOV R2,#0aH ;调幅倍数 MOV R4,#01H ;增减选择 MOV R5,#01H pp: SETB EA SETB EX0 ;延时计数个数 MOV A,#0FFH ;读取波形状态 MOV P1,A MOV A,P1 JNB ACC.0,ZXB ;P1.0=0 则选择正弦波 JNB ACC.1,SJB ;P1.1=0 则选择三角波 JNB ACC.2,FB ;P1.2=0 则选择方波 AJMP PP ZXB:MOV R1,#00H .
LOOP1:MOV A,R1 MOV DPTR,#TABLE1 ;读取正弦波数据首地址 MOVC A,A+DPTR ;去表格数据 MOV B,R2 MUL AB ;幅度大小 INC R1 XCH A,R1 CLR C SUBB A,#0AH ;是否已采样半个周期 JNC LK1 ;C=0跳转,即R1大于0A,以采样半个周期以上 ADD A,#0AH XCH A,R1 ;还原R1 ADD A,#80H ;8OH为零点,取得正的幅度值 AJMP LK0 LK1:ADD A,#0AH XCH A,R1 MOV R3,A MOV A,#80H CLR C .
SUBB A,R3 ;80H为零点,取得负的幅度值LK0:MOV DPTR,#8000H ;送DA转换入口地址 MOVX DPTR,A MOV A,R5 KD:DEC R5 ;调用延时 CALL DELAY CJNE R5,#00H,KD MOV R5,A CJNE R1,#12H,LOOP1 LJMP PP FB:MOV R1,#00H LOOP2:MOV A,R1 MOV DPTR,#TABLE2 ;读取方波数据首地址 MOVC A,A+DPTR ;去表格数据 MOV B,R2 MUL AB ;幅度大小 INC R1 XCH A,R1 CLR C SUBB A,#0AH ;是否已采样半个周期 .
51单片机实现PWM波占空比可调
51单片机实现PWM波占空比可调 平台:STC89C52 名称:本程序为用单片机制作的占空比均匀间隔可调PWM发生器。占空比可调间隔为0.1。即可取得占空比为0%,10%,20%……90%到100%的PWM波。 该波的频率固定为1KH(周期1000微秒)。 SY-1学习板上的操作键: S2----占空比加S3----占空比减 晶振:11.0592MHZ 程序代码: #include
} } void display(a) { dula=0; P0=table[a]; dula=1; dula=0; wela=0; P0=0xfe; wela=1; wela=0; } void main() { TMOD=0x01; //模式设置,00000001,可见采用的是定时器0,工作与模式1(M1=0,M0=1)。 TR0=1; //打开定时器 TH0=0Xff; //定时器设置,每隔100微秒发起一次中断。 TL0=0Xa4; ET0=1; //开定时器0中断 EA=1; //开总中断 while(1) { keyscan(); if((num!=0)&&(num!=10)) //对于占空比为0和100%这两种极端情况,最好分离出,单独考虑 { if(pp<=num) pwm=1; else pwm=0; } else if(num==0) //当占空比为0 pwm=0; else pwm=1; if(pp==10) //当占空比为100% pp=0; display(num);//显示num当前值,占空比为num/10。 }
微机原理及其应用报告数模转换器DAC0832双缓冲输出设计
本科生实验报告 实验名称:数模转换器DAC0832双缓冲输出设计 一、实验目的 1)了解DAC0832芯片引脚、内部结构及工作原理; 2)掌握应用单片机I/O 端口控制DAC0832实现数模转换的方法; 3)掌握DAC0832单缓冲和双缓冲控制技术及编程设计方法; 二、实验原理 DAC0832是8位分辨率的数模转换集成芯片,内部采用倒T 形网络,电流型 输出模式,电流输出稳定时间为1us ,采用单电源供电。 片内部由一个8位输入锁存器、一个8位DAC 寄存器和一个8位D/A 转换器构成,内部具有双缓冲结构,可以实现单缓冲、双缓冲数字输入。 双缓冲同步控制方式 : 针对多个模拟量需要同时输出的控制系统,可以采用双缓冲同步控制方式。D/A 转换数据的输入锁存和D/A 转换输出分两步完成。首先,CPU 分时向各路D/A 转换器输入要转换的数字量并锁存在各自的输入锁存器中,然后,CPU 同时对所有D/A 转换器发出输入所存数据打入DAC 寄存器的控制信号,即可实现 VREF IOUT2 IOUT1 DGND VCC AGND RFB
多通道的同步模拟量数据输出。 应用双缓冲方式,可以在输出模拟信号的同时采集下一个数字量,有效地提高转换速度。另外,可以在多个D/A转换器同时工作时,利用双缓冲模式实现多路D/A的同步输出。 三、实验内容 通过单片机I/O端口控制两路DAC0832实现数模转换,控制方式采用双缓冲控制方式。 1.阅读理解双缓冲控制电路图,分析双缓冲模式下DAC0832与单片机接口电路的设计及两次DA转换实验在控制电路上的异同。 2.设计程序,实现双缓冲模式下DA转换的同步输出。 首先,CPU分时向各路D/A转换器输入要转换的数字量并锁存在各自的输入锁存器中,然后,通过按键控制,同时对两个DAC0832锁存数据进行数模转换,同步产生三角波、正弦波模拟输出信号。 四、实验过程 1,实验原理图 2,实验源程序 #include
dac0832函数信号发生器.
智能仪器课程设计 设计题目:函数信号发生器设计 学生姓名:赵鑫、罗承波、江再农 学院名称:机械工程学院 班级:测控技术与仪器062班 学号:200646000227、20064600222、20064600215 指导教师:袁锋伟、王玉林、蒋彦 2009年6月
设计任务: 设计一个函数信号发生器,具体指标如下: 1采用AT89S51及DAC0832设计函数信号发生器; 2输出函数信号为正弦波或三角波或阶梯波; 3输出信号频率为100Hz,幅度0-10V可调; 4必须具有信号输出及外接电源、公共地线接口
低频函数信号发生器的设计 摘要:信号发生器是一种常用的信号源,广泛地应用于电子电路、自动控制系统和教学实验等领域。目前使用的信号发生器大部分是利用分立元件组成的体积大,可靠性差,准确度低。课程设计需要各个波形的基本输出,这些波形的实现的具体步骤:正弦波的实现是非常麻烦的。它的实现过程是通过定义一些数据,然后执行时直接输出定义的数据就可以了。而三角波,则每次累加1,当达到初值时,每次累减1,算出延时时间,也就达到要求了,阶梯波和三角波类似!该设计使用的是AT89S51单片机构成的发生器,可产生三角波、方波、正弦波等多种波形,波形的频率可用程序控制改变。在单片机上加外围器件独立式开关,通过开关控制波形的选择。在单片机的输出端口接DAC0832进行DA转换,再通过运放进行波形调整,最后输出波形接在示波器上显示。 关键词:信号发生器;单片机;波形调整
The design of low-frequency function signal-generator Abstract:Signal generator is a common signal source, widely used in electronic circuits, automatic control systems and experiments in areas such as teaching. Currently used by most of the signal generator is composed of discrete components use bulky, poor reliability, low accuracy. Curriculum design of the basic needs of all the output waveform, the waveform of the specific steps to achieve: the realization of sine wave is very troublesome. It is through the implementation of the definition of some data, and then direct the output when the definition of the implementation of the data on it. The triangle wave, then add 1 each time, when the initial value to reach every tired by 1, calculate the delay time, they meet the requirement, the ladder-wave and triangular wave similar! The design is composed of single-chip AT89S51 generator can produce the triangular wave, square wave, sine wave, etc.,
单片机控制DAC0832输出正弦波三角波汇编程序
单片机控制DAC0832 输出正弦波三角 波 汇编程序 org 0000h LJMP MAIN ORG 0003H LJMP L0 MAIN:MOV R2,#0aH MOV R4,#01H MOV R5,#01H pp: SETB EA SETB EX0 MOV A,#0FFH MOV P1,A MOV A,P1 JNB ACC.0,ZXB JNB ACC.1,SJB JNB ACC.2,FB AJMP PP ZXB:MOV R1,#00H LOOP1:MOV A,R1 ;调幅倍数 ;增减选择 ;延时计数个数 ;读取波形状 态 ;P1.0=0 则选择正弦 波 ;P1.1=0 则选择三角波 ;P1.2=0 则选择方波
MOV DPTR,#TABLE1 ;读取正弦波数据首地址 MOVC A,@A+DPTR ;去表格数据 MOV B,R2 MUL AB ;幅度大小 INC R1 XCH A,R1 CLR C SUBB A,#0AH ;是否已采样半个周期 JNC LK1 ;C=0 跳转,即R1 大于0A,以采样半个周期以上 ADD A,#0AH XCH A,R1 ;还原R1 ADD A,#80H ;8OH 为零点,取得正的幅度值 AJMP LK0 LK1:ADD A,#0AH XCH A,R1 MOV R3,A MOV A,#80H
CLR C SUBB A,R3 ;80H 为零点,取得负的幅度值LK0:MOV DPTR,#8000H ;送DA 转换入口地址MOVX @DPTR,A MOV A,R5 KD:DEC R5 ;调用延时 CALL DELAY CJNE R5,#00H,KD MOV R5,A CJNE R1,#12H,LOOP1 LJMP PP FB:MOV R1,#00H LOOP2:MOV A,R1 MOV DPTR,#TABLE2 ;读取方波数据首地址 MOVC A,@A+DPTR ;去表格数据 MOV B,R2 MUL AB ;幅度大小 INC R1
单片机 占空比可调的PWM波形发生器
河南机电高等专科学校电气工程系 微控制器技术课程 设计报告 设计题目:占空比可调的PWM波形发生器!
微控制器技术课程设计任务书 设计题目:占空比可调的PWM波形发生器 ¥ 设计时间:—— 设计任务: 在Proteus中画出原理图或使用实物,编制程序,实现以下功能: 1、理解PWM的工作原理。 2、编制PWM程序,使用八段发光字符管显示占空比。 3、可与电机连接,驱动电机以不同的转速旋转。 背景资料:1、单片机原理与应用 2、检测技术 ] 3、计算机原理与接口技术 进度安排: 1、第一天,领取题目,熟悉设计内容,分解设计步骤和任务; 2、第2天,规划设计软硬件,编制程序流程、绘制硬件电路。 3、第3天,动手制作硬件电路,或编写软件,并调试。 4、第4天,中期检查,书写设计报告。 5、第5天,提交设计报告,整理设计实物,等待答辩。 6、第6天,设计答辩。
? 题目:占空比可调的PWM波形发生器 一、设计目的 掌握PWM的工作原理;学会编制PWM程序,使用八段发光字符管显示占空比;并与电机连接,驱动电机以不同的转速旋转。 二、设计思路 直流电机PWM控制系统的主要功能包括:实现对直流电机转速的调整,能够很方便的实现电机的智能控制。 主体电路:即直流电机PWM控制模块。这部分电路主要由AT89C51单片机的I/O端口、定时计数器、外部中断扩展等调整直流电机的转速,能够很方便的实现电机的智能控制。其间是通过AT89C51单片机产生脉宽可调的脉冲信号并输入到L298驱动芯片来控制直流电机工作的。该直流电机PWM控制系统由以下电路模块组成: 设计输入部分:这一模块主要是利用带中断的独立式键盘来实现对直流电机的加速、减速控制。 设计控制部分:主要由AT89C51单片机的外部中断扩展电路组成。直流电机PWM控制实现部分主要由一些二极管、电机和L298直流电机驱动模块组成。 设计显示部分:LED数码显示部分,实现对PWM脉宽调制占空比的实时显示。 … 三、方案设计
51单片机模拟PWM输出占空比可调
#include
P0=0xff; wei=1; P0=0xfe; wei=0; delayms(3); duan=1; P0=SEG[ge]; duan=0; P0=0xff; wei=1; P0=0xfd; wei=0; delayms(3); } void timer0() interrupt 1 //定时器中断{ i++; if(i==5000) { i=0; j++; j=j%10; } if(j 调试时,电源的质量需要较高,不然的话,波形不易观察看清楚。 //河北工程大学信电学院自动化系 //设计调试成功 ***************将DA输出的 0V ~ -5V范围扩展成 -5V ~ +5V范围,电路如下图:*************** 如若VO2输出更平滑一些,可以在VO2处接一个小电容,滤掉高频。 (一)过程分析计算如下: ?第一级运放出来的V o1=-N*V ref/256。当V ref为+5V时,V o1=0~ -5V。 其中,V ref为参考电压,N为8位数字量输出到DAC0832 ?并结合第二级运放,是否可以推出来如下式子: V o2=-(2*V o1+V ref)=-(2*-N*V ref/256+V ref) =-(-2N*V ref/256+V ref) =2N*V ref/256-V ref 当参考电压V ref=5V时,V o2=10N/256-5。 由于要求输出的是正弦波xsinθ,幅值x不定,下面考虑幅值x分别取5和1的情况: ●当输出波形为5 sinθ时:5 sinθ=V o2 =2N*V ref/256-V ref =10N/256-5 //此时V ref=+5V 得sinθ=2N/256-1 ●当输出波形为sinθ时:sinθ=V o2 =2N*V ref/256-V ref =10N/256-5 //此时V ref=+5V 得sinθ=10N/256-5 最后可以考虑输出波形的频率问题。例如要求输出特定频率的正弦波。 (二)针对输出的不同幅值波形 ?当输出波形为5 sinθ时:得sinθ=2N/256-1 这里我们要求进步为一度。具体到进步大小,和内存RAM或者ROM有关,即和你存放数据表的空间有关。放到哪个空间都可以。(这里周期采样最多256个点,步数可以为1、2、5等,自己视情况而定,这里由于是360度,256个采样点,故步的大小360/256=1.4=△θ,由此算的前三个 θ=0,1.4,2.8……,对应N为0x80,0x83,0x86……) 通过sinθ的特征和计算部分数据发现规律: 0~90度与90~180度大小是对称的;181~270度与270~359度是对称的。 故,不是所有数据都是计算的。 DAC0832电路与程序设计(正弦波) 1.函数法正弦波 #include void delay(unsigned char i) { unsigned char j; for(;i>0;i--) for(j=0;j<110;j++); } void main() { cs1=0; rd=0; while(1) { q=0; for(q=0;q<225;q++) { p=5+q; if(p>255) p=0; f=(sin(2*pi/225*q)+1)*128; a=f; P1=a; //delay(10); } } } 2.查表法正弦波高低频叠加 #include 什么是PWM 脉冲宽度调制(PWM) 是英文"Pulse Width Modulation"的缩写,简 称脉宽调制,是利用微处理器的数字输出来对模拟电路进行控制的一种非常 有效的技术,广泛应用在从测量、通信到功率控制与变换的许多领域中。 pwm 的频率: 是指1秒钟内信号从高电平到低电平再回到高电平的次数(一个周期); 也就是说一秒钟PWM 有多少个周期 单位:Hz 表示方式S 50Hz lOOHz pwm 的周期J T=l/f 周期二1/频率 50Hz = 20ms —个周期 如果频率为50Hz ,也就是说一个周期是20ms 那么一秒钟就有50次 PWM 周期 占空比: 是一个脉冲周期内,高电平的时间与整个周期时间的比例 单位: % (0%-100%) 表示方式S 20% 周期 周期:一个脉冲信号的时间 脉宽时 间:高电平时间 上图中 脉宽时间占 总周期时间的比例,就是占空比。 比方说周期的时间是10ms,脉宽时间是8nis 那么低电平时间就是2nis 总的占空比8/8+2= 80%. 这就是占空比为80%的脉冲信号。而我们知道PWM 就是脉冲宽度调 制通过调节占空比,就可以调节脉冲宽度(脉宽时间)而频率就是单位时 间内脉冲信号的次数,频率越大。 以20HZ 占空比为80%举例 就是1秒钟之内输出了 20次脉冲信号 每 次的高电平时间为40ms 我们换更详细点的图 脉宽时间 脉宽吋间 1S 内测周期次数等于频率 50% 50% 上图中,周期为T T1为高电平时间 T2为低电平时间 假设周期T为1S那么频率就是IHz那么高电平时间0.5s ,低电平时间0?5s总的占空比就是0.5 /I =50% PVM 原 以单片机为例,我们知道,单片机的10 口输出的是数字信号,10 口只 能输出高电平和低电平。 假设高电平为5V低电平则为0V那么我们要输出不同的模拟电压,就要用到PWM,通过改变10 口输出的方波的占空比从而获得使用数字信号模拟成的模拟电压信号。 我们知道,电压是以一种连接1或断开0的巫复脉冲存列被夹到模拟负载上去的(例如LED灯,直流电机等),连接即是直流供电输出,断开即是直流供电断开。通过对连接和断开时间的控制,理论上来讲,可以输出任意不大于最大电压值(即O'SV之间任意大小)的模拟电压。 比方说占空比为50%那就是高电平时间一半,低电平时间一半,在一定的频率下,就可以得到模拟的2. 5V输出电压那么75%的占空比得到的电圧就是3. 75Vo 设计说明书 题目:DAC0832数模转换 专业:机电 班级:机械111 姓名:蒋德昌 学号:2011071117 摘要 波形发生器是能够产生大量的标准信号和用户定义信号,并保证 高精度、高稳定性、可重复性和易操作性的电子仪器。函数波形发 生器具有连续的相位变换、和频率稳定性等优点,不仅可以模拟各 种复杂信号,还可对频率、幅值、相移、波形进行动态、及时的控制,并能够与其它仪器进行通讯,组成自动测试系统,因此被广泛 用于自动控制系统、震动激励、通讯和仪器仪表领域。 本设计是基于DAC0832波形发生器设计与实现。系统是用AT89C51 作为系统的控制核心,外围电路采用数字/模拟转换电路DAC0832, 运放电路采用最简单的反相放大器,按键,LCD显示器等。系统通 过按键来进行整个系统的控制,按键控制切换产生正弦波,锯齿波,三角波,并且通过另外四个按键改变幅值和频率。系统经过调试和 最后的检测,可以得出本系统一下特点:性能较好,稳定性强,价 格便宜,容易操作,具有一定的实用性,最后的成品可以用在常用 的有波形发生器功能要求的应用电子仪器设备上。 关键词:单片机波形发生器 DAC0832 LCD显示器 目录 1设计任务 (4) 2系统整体方案 (4) 3仿真图 (6) 4所用硬件介绍 (9) 4.1 DAC0832 (9) 4.2 LCD1602 (10) 4.3排阻 (11) 4.4 运算放大器 (12) 4.5按键 (13) 5软件系统设计 (14) 5.1 主程序流程图 (14) 5.2波形选择的设计 (14) 5.3按键改变波形频率的设计 (15) 5.4按键改变波形振幅的设计 (15) 6总结 (16) 脉冲宽度调制 脉冲宽度调制(PWM)是英文“Pulse Width Modulation”的缩写,简称脉宽调制。它是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术,广泛应用于测量,通信,功率控制与变换等许多领域。一种模拟控制方式,根据相应载荷的变化来调制晶体管栅极或基极的偏置,来实现开关稳压电源输出晶体管或晶体管导通时间的改变,这种方式能使电源的输出电压在工作条件变化时保持恒定。 脉冲宽度调制(PWM)是一种对模拟信号电平进行数字编码的方法。通过高分辨率计数器的使用,方波的占空比被调制用来对一个具体模拟信号的电平进行编码。PWM信号仍然是数字的,因为在给定的任何时刻,满幅值的直流供电要么完全有(ON),要么完全无(OFF)。电压或电流源是以一种通(ON)或断(OFF)的重复脉冲序列被加到模拟负载上去的。通的时候即是直流供电被加到负载上的时候,断的时候即是供电被断开的时候。只要带宽足够,任何模拟值都可以使用PWM进行编码。 多数负载(无论是电感性负载还是电容性负载)需要的调制频率高于10Hz,通常调制频率为1kHz到200kHz之间。 许多微控制器内部都包含有PWM控制器。例如,Microchip公司的PIC16C67内含两个PWM控制器,每一个都可以选择接通时间和周期。占空比是接通时间与周期之比;调制频率为周期的倒数。执行PWM操作之前,这种微处理器要求在软件中完成以下工作: * 设置提供调制方波的片上定时器/计数器的周期 * 在PWM控制寄存器中设置接通时间 * 设置PWM输出的方向,这个输出是一个通用I/O管脚 * 启动定时器 * 使能PWM控制器 PWM的一个优点是从处理器到被控系统信号都是数字形式的,无需进行数模转换。让信号保持为数字形式可将噪声影响降到最小。噪声只有在强到足以将逻辑1改变为逻辑0或将逻辑0改变为逻辑1时,也才能对数字信号产生影响。 对噪声抵抗能力的增强是PWM相对于模拟控制的另外一个优点,而且这也是在某些时候将PWM用于通信的主要原因。从模拟信号转向PWM可以极大地延长通信距离。在接收端,通过适当的RC或LC网络可以滤除调制高频方波并将信号还原为模拟形式。 总之,PWM既经济、节约空间、抗噪性能强,是一种值得广大工程师在许多设计应用中使用的有效技术。 几种PWM控制方法 采样控制理论中有一个重要结论:冲量相等而形状不同的窄脉冲加在具有惯性的环节上时,其效果基本相同.PWM控制技术就是以该结论为理论基础,对半导体开关器件的导通和关断进行控制,使输出端得到一系列幅值相等而宽度不相等的脉冲,用这些 DAC0832波形产生锯齿波 程序如下 #include DelayMs(1); } } DAC0832波形产生稳定波 #include #define uchar unsigned char #define uint unsigned int #define DAC0832 XBYTE[0xFFFE] void DelayMs(uint ms) { uchar t; while(ms--) for(t=0;t<120;t++); } void main() { while(1) { DAC0832=200; DelayMs(1); } } DAC0832波形产生方波 #include #include 本科生实验报告 实验名称:数模转换器DAC0832双缓冲输出设计 一、实验目的 1)了解DAC0832芯片引脚、内部结构及工作原理; 2)掌握应用单片机I/O端口控制DAC0832实现数模转换的方法; 3)掌握DAC0832单缓冲和双缓冲控制技术及编程设计方法; 二、实验原理 DAC0832是8位分辨率的数模转换集成芯片,内部采用倒T形网络,电流型输出模式,电流输出稳定时间为1us,采用单电源供电。 片内部由一个8位输入锁存器、一个8位DAC寄存器和一个8位D/A转换器构成,内部具有双缓冲结构,可以实现单缓冲、双缓冲数字输入。 双缓冲同步控制方式: 针对多个模拟量需要同时输出的控制系统,可以采用双缓冲同步控制方式。D/A转换数据的输入锁存和D/A转换输出分两步完成。首先,CPU分时向各路D/A转换器输入要转换的数字量并锁存在各自的输入锁存器中,然后,CPU同时对所有D/A转换器发出输入所存数据打入DAC寄存器的控制信号,即可实现 多通道的同步模拟量数据输出。 应用双缓冲方式,可以在输出模拟信号的同时采集下一个数字量,有效地提高转换速度。另外,可以在多个D/A转换器同时工作时,利用双缓冲模式实现多路D/A的同步输出。 三、实验内容 通过单片机I/O端口控制两路DAC0832实现数模转换,控制方式采用双缓冲控制方式。 1.阅读理解双缓冲控制电路图,分析双缓冲模式下DAC0832与单片机接口电路的设计及两次DA转换实验在控制电路上的异同。 2.设计程序,实现双缓冲模式下DA转换的同步输出。 首先,CPU分时向各路D/A转换器输入要转换的数字量并锁存在各自的输入锁存器中,然后,通过按键控制,同时对两个DAC0832锁存数据进行数模转换,同步产生三角波、正弦波模拟输出信号。 四、实验过程 1,实验原理图 2,实验源程序 #include 什么就是占空比 占空比(Duty Cycle)在电信领域中意思: 在一串理想的脉冲序列中(如方波),正脉冲的持续时间与脉冲总周期的比值。 例如:脉冲宽度1μs,信号周期4μs的脉冲序列占空比为0、25。 在一段连续工作时间内脉冲占用的时间与总时间的比值。 在CVSD调制(continuously variable slope delta modulation)中,比特“1”的平均比例(未完成)。 在周期型的现象中,现象发生的时间与总时间的比。 负载周期在中文成语中有句话可以形容:「一天捕渔,三天晒网」,则负载周期为0、25。 占空比就是高电平所占周期时间与整个周期时间的比值。 占空比越大,高电平持续的时间越长,电路的开通时间就越长 PWM值增加则占空比减少!!!!!!!(请先瞧下面关于PWM的定义)PWM值增加应该就是周期变大,那么占空比就减小了(此为个人见解如有不同见解请发邮箱1250712643@qq、com) 占空比的图例 什么就是占空比(另一种解释) 占空比就是指高电平在一个周期之内所占的时间比率。方波的占空比为50%,占空比为0、1,说明正电平所占时间为0、1个周期。 正脉冲的持续时间与脉冲总周期的比值。例如:正脉冲宽度1μs,信号周期10μs的脉冲序列 占空比为0、1。 什么就是PWM 1、脉冲宽度调制(PWM)就是英文“Pulse Width Modulation”的缩写,简称脉宽调制。 它就是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术,广泛应用于测量,通信,功率控制与变换等许多领域。 脉冲宽度调制(PWM)就是一种对模拟信号电平进行数字编码的方法。通过高分辨率计数器的使用,方波的占空比被调制用来对一个具体模拟信号的电平进行编码。PWM 信号仍然就是数字的,因为在给定的任何时刻,满幅值的直流供电要么完全有(ON),要么完全无(OFF)。电压或电流源就是以一种通(ON)或断(OFF)的重复脉冲序列被加到模拟负载上去的。通的时候即就是直流供电被加到负载上的时候,断的时候即就是供电被断开的时候。只要带宽足够,任何模拟值都可以使用PWM进行编码。 2、PWM控制的基本原理 理论基础:冲量相等而形状不同的窄脉冲加在具有惯性的环节上时,其效果基本相同。冲量指窄脉冲的面积。效果基本相同,就是指环节的输出响应波形基本相同。低频段非常接近,仅在高频段略有差异。 图1 形状不同而冲量相同的各种窄脉冲 面积等效原理: 分别将如图1所示的电压窄脉冲加在一阶惯性环节(R-L电路)上,如图2a所示。其输出电流i(t)对不同窄脉冲时的响应波形如图2b所示。从波形可以瞧出,在i(t)的上升段,i(t) DAC0832波形发生器课程设计实验报告 目录 第1章系统设计方案 (2) 1.1 设计思路 (2) 1.2 方案比较与选择 (2) 第2章系统硬件设计..................................................................................2. 2.1 主控制器电路 (2) 2.2 数模转换电路 (3) 第3章系统软件设计................................................................................ .6 3.1 系统整体流程...................................................................................... .6 3.2 数模转换程序...................................................................................... .6 第4章系统调试 (8) 4.1 proteus的调试 (8) 第5章结论与总结 (11) 5.1 结论 (11) (系统总体设计与完成做一个总结,是客观的,主要包括:设计思路,设计过程,测试结果及完善改进的方向。) 5.2 总结 (11) (这是一个主观的总结,谈谈自己收获和不足等方面的内容。) 第1章系统设计方案 1.1 设计思路 (一)、课设需要各个波形的基本输出。如输出矩形波、锯齿波,正弦波。这些波形的实现的具体步骤:正弦波的实现是非常麻烦的。它的实现过程是通过定义一些数据,然后执行时直接输出定义的数据就可以了。然而为了实现100HZ的频率,终于发现,将总时间除了总步数,根据每步执行时间,算出延时时间,最终达到要求,然后建一个表通过查表来进行输出,这样主要工作任务就落到了建表的过程中。这样做的好处在于,查表所耗费的时钟周期相同,这样输出的点与点之间的距离就相等了,输出的波形行将更趋于完美,当然更让我们感到的高兴的是它输出波形的频率将近达到了100赫兹,能够满足我们设计的扩展要求了。 PWM 按键控制灯亮度(改变占空比) MCU 2010-04-05 20:32:09 阅读63 评论0字号:大中小 明文作品,谢谢欣赏! 功能说明:PWM,通过改变占空比,PWM_T/100, 这里100是周期,每个按键都会给PWM_T一个定值,这样就改变了输出波形。 仿真运行后,点击debug->4. digital oscillicope(最后一项) 就能够看到波形了。 观察低电平占的比例10% ,这里WPM-T=10 10/100=10% 观察低电平占的比例60% ,这里WPM-T=60 60/100=60% /**************************************************** 6个按键决定6个亮度 占空比:PWM_T/100,越大越亮 ****************************************************/ #include sbit c7=P3^7; //6个按键,决定输出PWM_T值 sbit c6=P3^6; sbit c5=P3^5; sbit c4=P3^4; sbit c3=P3^3; sbit c2=P3^2; /**************************************************** 主程序 ****************************************************/ void main(void) { uInt n; TMOD=0x02; //定时器0,工作模式2,8位定时模式 TH0=210; //写入预置初值(取值1-255,数越大PWM频率越高) TL0=210; //写入预置值(取值1-255,数越大PWM频率越高) TR0=1; //启动定时器 ET0=1; //允许定时器0中断 EA=1; //允许总中断 P1=0xff; //初始化P1,输出端口 P0=0xff; //初始化P0 while(1) //PWM周期100,高电平100- PWM_T,低电平PWM_T,低电平工作{ for(n=0;n<200;n++); //延时,取值0-65535,数字越大变化越慢 if(!c7||!c6||!c5||!c4||!c3||!c2) //通过按键改变占空比 {单片机制作简易正弦波信号发生器(DAC0832)
DAC0832电路与程序(正弦波)
详解PWM原理、频率与占空比
DAC0832数模转换说明书
PWM脉宽调制方法介绍
DAC0832多种波形产生
微机原理及其应用报告:数模转换器DAC0832双缓冲输出设计
利用PWM控制占空比
DAC0832波形发生器课程设计实验报告
PWM 按键控制灯亮度(改变占空比)