simpack how-to-model-axle-bogie

How to model a two axle bogie
1. General
The basic component of all wheel/rail models is a bogie. This guide shows, how to set-up a basic bogie structure. It gives an overview about the topology of bogie models and should be a fundamental model for your further work. The model can be further extended for use in various different applications.
2. Additional Features
During the model set-up it will also be shown, how to define substitution variables and apply them to the model. It’s a very efficient method, which allows modifications to be easily made to complicated structures.
3. Creating an Example Model
3.1. Concept
The model is a simple model to allow you to understand the topology and the concepts in SIMPACK. First a short substitution variable set is to be defined, to aid an efficient model set-up and further modifications to the model. Two identical wheelsets will then be defined in different positions and a bogie frame using the pre-defined substitution variables. Finally a simplified primary suspension will be set-up; using component force elements between the wheels and the bogie frame. To prepare the solver, there will be a number of globals such as wheel/rail profiles and velocity, which are to be defined.
3.2 Modelling
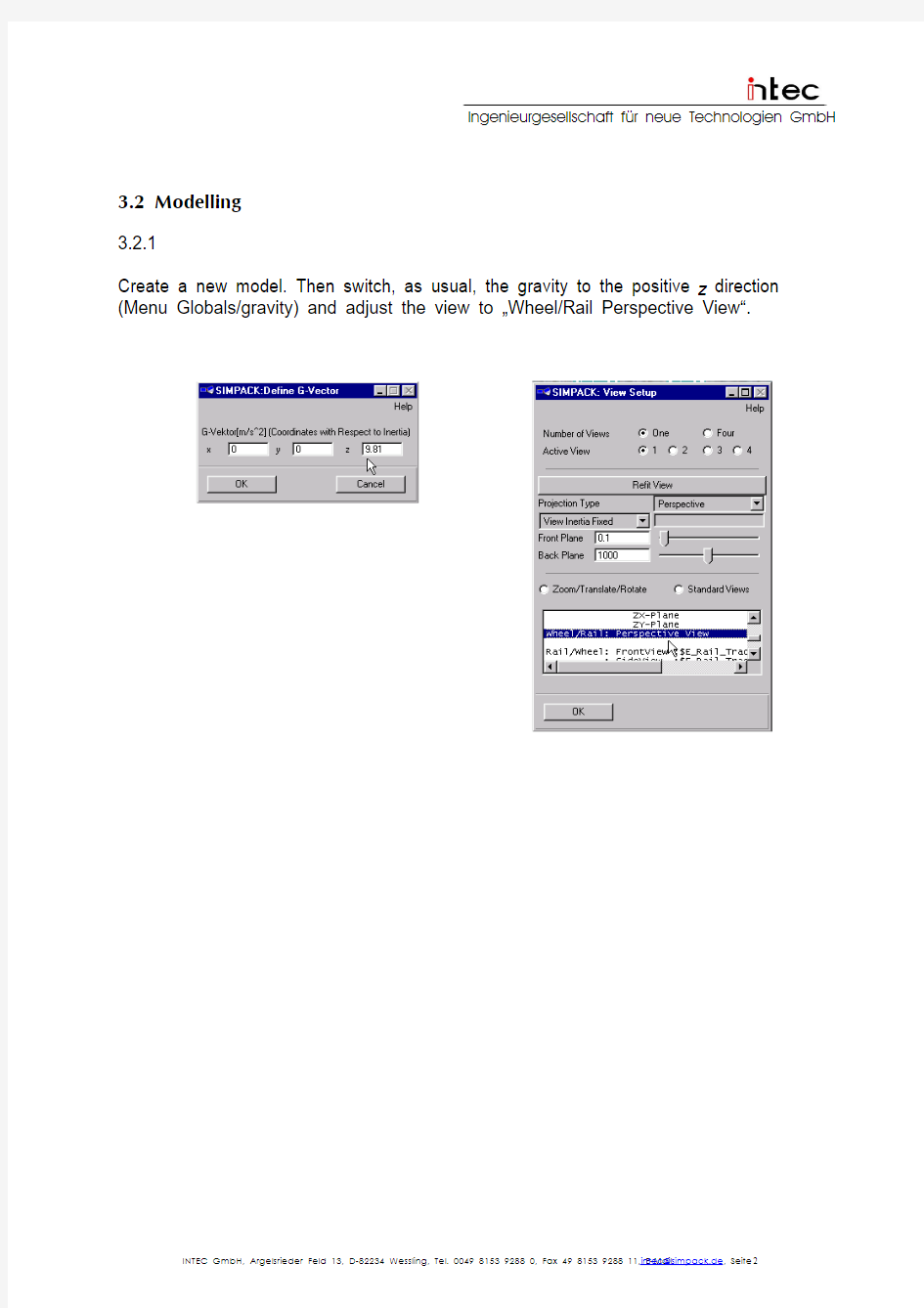
3.2.1
Create a new model. Then switch, as usual, the gravity to the positive z direction (Menu Globals/gravity) and adjust the view to …Wheel/Rail Perspective View“.
3.2.2
Define the following substitution variables to help an efficient model set-up.
Under the icon above, define new substitution variables as shown in the screenshot below.
$_WS_BASE = 2.5000000000E+00 $_SUSP_BASE_LAT = 2.0000000000E+00 $_PRIM_SUSP_X = $_WS_BASE/2 $_PRIM_SUSP_Y = $_SUSP_BASE_LAT/2 $_PRIM_SUSP_Z = -5.0000000000E-01 $_NEG_PRIM_SUSP_X = -1*$_PRIM_SUSP_X $_NEG_PRIM_SUSP_Y = -1*$_PRIM_SUSP_Y
3.2.3
Rename $B_Body1 to $B_WS1 and enter the data for the body definition as shown in the figure below.
3.2.4
Modify the …3D Geometry“ and replace the Cuboid by a Cylinder with the following data;
Diameter: 0,18m
Length: 2,00m
3.2.5
Modify the wheelset joint as shown in the figure below ( Joint Type 07, No. of DOF = 6 ) and enter the menu …Generate/Update Wheel-Rail Elements of Joint“.
3.2.6
In the window below, please note that the bodies for the rails can be changed as well as the bodies for the left and right wheel. Click on OK!
3.2.7
Define the track under the menu globals/track and accept the default settings with OK!
3.2.8
Define a new body “$B_WS2” and repeat the instructions from 3 to 7. In the Joint definition window type 2.5 m for the arc length!
3.2.9
Create new markers in the Body definition window for the wheelsets left and right side using the defined substitution variables!
3.2.10
Define a new body, called $B_BF with the following parameters.
3.2.11
Define the joint of the bogie frame (Joint type 7, 6DOF) and set the arc length to 1.25 m.
3.2.12
Define new markers on the bogie frame using the substitution variables!
3.2.13
Define also 4 new Force elements for the primary suspension with the following parameters.
Force type: 05 Spring-damper parallel cmp
From Marker of the primary suspension is always located at the Bogie_frame and not at the rotating wheelset. (SIMPACK uses the from marker as reference for the calculations)
To Marker is on the wheelset.
Force Parameters:
Cx: 100000000N/m
Cy: 100000000N/m
Cz: 5000000N/m
Dx,Dy,Dz: 20000Ns/m
3.2.14
Finally define some global settings! In the menu Globals/Vehicle Globals define the velocity for the model and click on …apply as defaults“ Leave all other settings as default and close the window. In the menu views/view setup switch on moved view. Select in the menu calculation assemble system and save the model!
3.2.15
Close the Model Setup window and define the solver settings in the Main window! In the Menu Calculation/Time Integration/Configure set end time of the simulation to 5 seconds save the settings and exit the window. Click on the icon below to perform the time integration + measurements!
3.2.16
In the post-processing general plots look at, for example, the force element output values.
3.2.17
Nominal Force Calculation
With the icon above or in the calculation menu in the main window you can open the nominal force calculation block, looks like below.
Pick in the window on selection of force parameters and pick in the new window; “Init with all possible forces”. Than close the window and pick perform. After the calculation save the results and reload your model.
3.2.18
By nominal force calculation you reached with your system an equilibrium state, so it′s possible to carry out eigenvalue calculations.
Also in the menu calculation you could find eigenvalues or start the block directly using the icon above. Just pick on perform, save the results and reload the model. In the model setup window; menu Animation/Model Shapes you can open a window like below. Choose on of the eigenvalues, set the scaling and start the animation.
4. Application
This model is a simple representation of a bogie used to analyse dynamic behaviour. Bogie models of this kind have been used in the eighties and early nineties for investigating stability and curving behaviour of railway vehicles. This type of model requires the real primary suspension design to be reduced to a compact force element with resulting stiffness and damping coefficients in the x, y, and z directions. Kinematically non-linear effects caused by axle boxes with trailing arms, for example, are not considered with this model. Additionally, each design modification, e.g. a different bushing of a trailing arm, requires a recalculation of the contact spring parameters.
Today, with the state of the art SIMPACK Wheel/Rail, more advanced and versatile models can be achieved. Bogies with a higher level of detail are covered in the SIMPACK Wheel/Rail training.
哈工大_控制系统实践_磁悬浮实验报告
研究生自动控制专业实验 地点:A区主楼518房间 姓名:实验日期:年月日斑号:学号:机组编号: 同组人:成绩:教师签字:磁悬浮小球系统 实验报告 主编:钱玉恒,杨亚非 哈工大航天学院控制科学实验室
磁悬浮小球控制系统实验报告 一、实验内容 1、熟悉磁悬浮球控制系统的结构和原理; 2、了解磁悬浮物理模型建模与控制器设计; 3、掌握根轨迹控制实验设计与仿真; 4、掌握频率响应控制实验与仿真; 5、掌握PID控制器设计实验与仿真; 6、实验PID控制器的实物系统调试; 二、实验设备 1、磁悬浮球控制系统一套 磁悬浮球控制系统包括磁悬浮小球控制器、磁悬浮小球实验装置等组成。在控制器的前部设有操作面板,操作面板上有起动/停止开关,控制器的后部有电源开关。 磁悬浮球控制系统计算机部分 磁悬浮球控制系统计算机部分主要有计算机、1711控制卡等; 三、实验步骤 1、系统实验的线路连接 磁悬浮小球控制器与计算机、磁悬浮小球实验装置全部采用标准线连接,电源部分有标准电源线,考虑实验设备的使用便利,在试验前,实验装置的线路已经连接完毕。 2、启动实验装置 通电之前,请详细检察电源等连线是否正确,确认无误后,可接通控制器电源,随后起动计算机和控制器,在编程和仿真情况下,不要启动控制器。 系统实验的参数调试
根据仿真的数据及控制规则进行参数调试(根轨迹、频率、PID 等),直到获得较理想参数为止。 四、实验要求 1、学生上机前要求 学生在实际上机调试之前,必须用自己的计算机,对系统的仿真全部做完,并且经过老师的检查许可后,才能申请上机调试。 学生必须交实验报告后才能上机调试。 2、学生上机要求 上机的同学要按照要求进行实验,不得有违反操作规程的现象,严格遵守实验室的有关规定。 五、系统建模思考题 1、系统模型线性化处理是否合理,写出推理过程? 合理,推理过程: 由级数理论,将非线性函数展开为泰勒级数。由此证明,在平衡点)x ,(i 00对 系统进行线性化处理是可行的。 对式2x i K x i F )(),(=作泰勒级数展开,省略高阶项可得: )x -)(x x ,(i F )i -)(i x ,(i F )x ,F(i x)F(i,000x 000i 00++= )x -(x K )i -(i K )x ,F(i x)F(i,0x 0i 00++= 平衡点小球电磁力和重力平衡,有 (,)+=F i x mg 0 |,δδ===00 i 00 i i x x F(i,x) F(i ,x )i ;|,δδ===00x 00i i x x F(i,x)F (i ,x )x 对2 i F(i,x )K()x =求偏导数得:
磁悬浮小球仿真报告
磁悬浮小球控制仿真报告 一.仿真要求 采用根轨迹和频域法仿真磁悬浮小球系统 二.系统建模 磁悬浮系统方程可以由下面的方程描述: 22 d x(t)m F(i,x )mg dt =+动力学方程 2 i F(i,x )K( )x = 电学力学关联方程 (,)+=F i x mg 0 边界方程 ()()=+1 di U t Ri t L dt 电学方程 对2x i K x i F )(),(=泰勒展开: )x -)(x x ,(i F )i -)(i x ,(i F )x ,F(i x)F(i,000x 000i 00++= )x -(x K )i -(i K )x ,F(i x)F(i,0x 0i 00++= 平衡点小球电磁力和重力平衡,有 (,)+=F i x mg 0 |,δδ=== 00i 00i i x x F(i,x)F(i ,x )i ;|,δδ===00 x 00i i x x F(i,x) F (i ,x )x 对2 i F(i,x )K()x =求偏导数得: ==- 20x x 003 02Ki K F (i ,x )x ==0 i i 00202Ki K F(i ,x )x 此系统的方程式如下: x x 2Ki i x 2Ki )x -(x K )i -(i K dt x d m 30 2 02000x 0i 22-=+= 拉普拉斯变换后得:
)()()(s x mx 2Ki s i mx 2Ki s s x 3 2 2002 -= 由边界方程 )20 2 0x i K(mg -= 代入得系统的开环传递函数: 200 x(s)-1 = i(s)a s -b 定义系统对象的输入量为控制电压in U ,系统对象输出量为x 所反映出来的输出电压为out U ,则该系统控制对象的模型可写为: out s s a 2in a 00 U (s)K x(s)-(K /K ) G(s)= ==U (s)K i(s)a s -b 00000 i i a = , b =2g x 特征方程为:200a s -b =0 解得系统的开环极点为:s =取系统状态变量分别为1out 2out x =u ,x =u 系统的状态空间表示法如下: ?11in s ?2200 a 0 1 0x x =+u 2g 2g?K 0-x x x i ?K ???????? ? ? ? ? ? ? ? ??? ? ??????? ][121x x x 0 1y =??? ? ??= 代入实际参数,可以得到 in 2121U 124990x x 0098010 x x ???? ? ?+???? ?????? ??=???? ? ????.. 系统的状态方程可以写为
磁悬浮系统的PID控制
磁悬浮系统的PID控制
本科毕业设计(论文)题目: 磁悬浮系统的PID控制 姓名: 学号: 专业: 指导教师: 职称: 日期: 华科学院
摘要 磁悬浮技术具有无摩擦、无磨损、无需润滑以及寿命较长等一系列优点,在能源、交通、航空航天、机械工业和生命科学等高科技领域有着广泛的应用背景。 本设计毕业设计在分析磁悬浮系统构成及工作原理的基础上,建立其数学模型,并以此为研究对象,设计了PID控制器,确定控制方案,运用MATLAB软件进行仿真研究,得出较好的控制参数。最后,本文对以后研究工作的重点进行了思考,提出了自己的见解。 关键词:磁悬浮系统控制器MATLAB软件PID控制
Abstract Magnetic suspension technology, which has a series of advantages such as contact-free, no friction, no wear, no need of lubrication and long life expectancy, is widely concerned and adopted in high-tech areas such as energy, transportation, aerospace, industrial machinery and life science.On the basis of analyzing of magnetic suspension system’s structure and working principle, its system mathematical model was established, this thesis describe PID controller designed and get control scheme. It get the better control parmeters by MATLAB software simulation studies.The key research works for further study are proposed at last. Key Word:Magnetic Levitation Ball System Digital Controller MATLAB PID Control
金蝶KIS专业版安装配置指南
-------------------------------------------------------------------------- 金蝶KIS专业版安装配置指南 -------------------------------------------------------------------------- 一.系统配置要求 1、服务器端 CPU 最低要求 1 GHz Pentium 4 处理器 推荐 1.7 GHz Pentium 4 处理器及以上 内存 最低 RAM 要求512MB 推荐 1G 内存 硬盘 需要1GB以上的可用空间 驱动器 需要 CD-ROM 或 DVD-ROM 驱动器 显示 Super VGA (1024x768) 或更高分辨率的显示器(颜色设置为32位真彩色) 鼠标 Microsoft 鼠标或兼容的指点设备 2、客户端 CPU 最低要求 600 兆赫 (MHz) Pentium III 处理器 推荐 1 GHz Pentium 4 处理器及以上 内存 最低 RAM 要求256MB 硬盘 需要 500 MB 以上的可用空间 驱动器 需要 CD-ROM 或 DVD-ROM 驱动器 显示 Super VGA (1024x768) 或更高分辨率的显示器(颜色设置为32位真彩色) 鼠标 Microsoft 鼠标或兼容的指点设备 二.操作系统要求 1、服务器端 Windows Server 2003 简体中文版 Windows 2000 Server 简体中文版 Windows XP Professional 简体中文版 Windows 2000 Professional 简体中文版 2、客户端 Windows Server 2003 简体中文版 Windows 2000 Server 简体中文版 Windows XP Professional 简体中文版 Windows 2000 Professional 简体中文版 三. 默认安装目录 KIS专业版的默认安装目录为:[Program Files]\Kingdee\KIS\Advance 四.安装组件 安装组件的分为“客户端”、“服务器端”.
上海高速磁悬浮地面牵引供电系统
1 引言 近些年来,磁浮列车以其高速、节能、安全、舒适、环保等优点日益受到人们越来越多的关注。目前德国和日本是世界上磁浮列车研究最多的国家:德国已经研制了tr系列吸力型磁浮列车,并在埃姆斯兰建造了大型试验用的tve试验线;日本也研制了mlu系列斥力型磁浮列车和hsst系列吸力型磁浮列车,并修建了山梨试验线。我国也在积极开展这方面的研究工作,上海已从德国引进了tr08型磁浮列车,并已投入了商业运行,同时也拉开了消化吸收其先进技术的序幕。在磁浮列车运行系统中,合理有效的牵引供电系统是实现磁浮列车高速可靠运行的关键之一,故而成为本文的主要研究对象。 2 磁浮列车牵引供电系统概况 磁浮列车按照动力源(直线电动机)定子的长短相应可分为短定子直线电动机驱动的磁浮列车和长定子直线电动机驱动的磁浮列车。短定子直线电动机是将定子绕组安装在车体的底部,通过向磁浮列车提供变压变频的电源,由车上的短定子产生行波磁场; 轨道上安置结构较为简单的长转子,这种结构多用于直线异步牵引电动机的驱动系统。由于列车通过受流器供电,而高速受流困难使列车运行速度、异步电机的功率因数及效率均受到限制,因此该系统仅用于低速小功率短距离的电力牵引。长定子直线同步电动机驱动的磁浮列车的底部安置有直线电机的转子,整条轨道上安装同步电机的长定子绕组。磁浮列车内部对转子的供电简单,没有高速受流的困难。采用这种直线同步电动机驱动,适合于高速、大功率、长距离的电力牵引。德国和日本均采用这种系统。德国研制了常导吸浮式磁浮列车:由车上常导电流产生的电磁吸引力吸引轨道下方的导磁体,使列车浮起。常导电流比较容易获得,通常由蓄电池或感应式发电线圈等设备产生电流,供给同步直线电动机的转子。但常导系统电磁吸引力相对较小,列车悬浮高度约10mm,故对控制精度的要求很高。日本研制的超导斥浮型磁浮列车是由车上强大的超导电流产生极强的电磁场,该电磁场相对线路侧墙上的8字形导电环高速移动,使导电环感应出强大的环流,在8字形下半环中形成推斥磁场,而上半环中则形成吸力磁场,使列车悬浮。该悬浮系统是一个无需反馈控制的稳定系统,而且悬浮高度可在10cm左右,从而使控制相对简单。 3 上海高速磁浮列车的牵引供电系统[1] 上海运营的高速磁浮列车是从德国引进的tr08型磁浮列车,采用长定子直线同步电动机和常导吸浮式系统。其牵引供电系统如图1所示,由高压变压器(110kv/20kv)、输入变压器、输入变流器、逆变器和输出变压器等主要部件构成。 磁悬浮列车牵引供电系统从110kv网压经高压变压器变为20kv,再由输入变压器和输入变流器变为±2500v的直流电压。从直流环节来的直流电压,由三相三点式逆变器产生可变频率(0~300hz)、可变幅值(0~×4.3kv)、可调相角(0~360°)的三相交流电。磁悬浮列车的牵引变流器有两种工作模式:
磁悬浮小球matlab
磁悬浮系统建模及其PID控制器设计Magnetic levitation system based on PID controller simulation 摘要 磁悬浮技术具有无摩擦、无磨损、无需润滑以及寿命较长等一系列优点,在能源、交通、航空航天、机械工业和生命科学等高科技领域有着广泛的应用背景。 随着磁悬浮技术的广泛应用,对磁悬浮系统的控制已成为首要问题。本设计以PID控制为原理,设计出PID控制器对磁悬浮系统进行控制。 在分析磁悬浮系统构成及工作原理的基础上,建立磁悬浮控制系统的数学模型,并以此为研究对象,设计了PID控制器,确定控制方案,运用MATLAB软件进行仿真,得出较好的控制参数,并对磁悬浮控制系统进行实时控制,验证控制参数。最后,本设计对以后研究工作的重点进行了思考,提出了自己的见解。 PID控制器自产生以来,一直是工业生产过程中应用最广、也是最成熟的控制器。目前大多数工业控制器都是PID控制器或其改进型。尽管在控制领域,各种新型控制器不断涌现,但PID控制器还是以其结构简单、易实现、鲁棒性强等优点,处于主导地位。 关键字:磁悬浮系统;PID控制器;MATLAB仿真 设计报告内容 1. 简述磁悬浮球系统的工作原理; 2. 依据电磁等相关物理定理,列写磁悬浮系统的运动方程;
3. 根据磁悬浮系统的运动方程搭建被控对象在Simulink环境下的仿真模型; 4. 结合单位反馈控制系统的控制原理,为被控对象设计PID控制器。 5. 分析综述比例P、积分I、微分D三个调节参数对系统控制性能的影响。 设计报告正文 1. 简述磁悬浮球系统的工作原理; 磁悬浮控制系统由铁心、线圈、光位移传感器、控制器、功率放大器和被控对象(钢球)等元器件组成。它是一个典型的吸浮式悬浮系统。系统开环结构如图4所示。 图2系统开环结构图 电磁铁绕组中通以一定的电流会产生电磁力,控制电磁铁绕组中的电流,使之产生的电磁力与钢球的重力相平衡,钢球就可以悬浮于空中而处于平衡状态。但是这种平衡是一种不稳定平衡,这是由于电磁铁与钢球之间的电磁力的大小与它们之间的距离)(t x成反比,只要平衡状态稍微受到扰动(如:加在电磁铁线圈上的电压产生脉动、周围的振动、风等),就会导致钢球掉下来或被电磁铁吸住,因此必须对系统实现闭环控制。由电涡流位移传感器检测钢球与电磁铁之间的
磁悬浮系统建模及其PID控制器设计
《Matlab仿真技术》 设计报告 题目磁悬浮系统建模及其PID控制器设计 专业班级电气工程及其自动化 11**班 学号 201110710247 学生姓名 ** 指导教师 ** 学院名称电气信息工程学院 完成日期: 2014 年 5 月 7 日
磁悬浮系统建模及其PID控制器设计 Magnetic levitation system based on PID controller simulation 摘要 磁悬浮技术具有无摩擦、无磨损、无需润滑以及寿命较长等一系列优点,在能源、交通、航空航天、机械工业和生命科学等高科技领域有着广泛的应用背景。 随着磁悬浮技术的广泛应用,对磁悬浮系统的控制已成为首要问题。本设计以PID 控制为原理,设计出PID控制器对磁悬浮系统进行控制。 在分析磁悬浮系统构成及工作原理的基础上,建立磁悬浮控制系统的数学模型,并以此为研究对象,设计了PID控制器,确定控制方案,运用MATLAB软件进行仿真,得出较好的控制参数,并对磁悬浮控制系统进行实时控制,验证控制参数。最后,本设计对以后研究工作的重点进行了思考,提出了自己的见解。 PID控制器自产生以来,一直是工业生产过程中应用最广、也是最成熟的控制器。目前大多数工业控制器都是PID控制器或其改进型。尽管在控制领域,各种新型控制器不断涌现,但PID控制器还是以其结构简单、易实现、鲁棒性强等优点,处于主导地位。 关键字:磁悬浮系统;PID控制器;MATLAB仿真
一、磁悬浮技术简介 1.概述: 磁悬浮是利用悬浮磁力使物体处于一个无摩擦、无接触悬浮的平衡状态,磁悬浮看起来简单,但是具体磁悬浮悬浮特性的实现却经历了一个漫长的岁月。由于磁悬浮技术原理是集电磁学、电子技术、控制工程、信号处理、机械学、动力学为一体的典型的机电一体化高新技术。伴随着电子技术、控制工程、信号处理元器件、电磁理论及新型电磁材料的发展和转子动力学的进一步的研究,磁悬浮随之解开了其神秘一方面。 1900年初,美国,法国等专家曾提出物体摆脱自身重力阻力并高效运营的若干猜想--也就是磁悬浮的早期模型。并列出了无摩擦阻力的磁悬浮列车使用的可能性。然而,当时由于科学技术以及材料局限性磁悬浮列车只处于猜想阶段,未提出一个切实可行的办法来实现这一目标。 1842年,英国物理学家Earnshow就提出了磁悬浮的概念,同时指出:单靠永久磁铁是不能将一个铁磁体在所有六个自由度上都保持在自由稳定的悬浮状态。 1934年,德国的赫尔曼·肯佩尔申请了磁悬浮列车这一的专利。 在20世纪70、80年代,磁悬浮列车系统继续在德国蒂森亨舍尔测试和实施运行。德国开始命名这套磁悬浮系统为“磁悬浮”。 1966年,美国科学家詹姆斯·鲍威尔和戈登·丹比提出了第一个具有实用性质的磁悬浮运输系统。 1970年代以后,随着世界工业化国家经济实力的不断加强,为提高交通运输能力以适应其经济发展的需要,德国、日本、美国、加拿大、法国、英国等发达国家相继开始筹划进行磁悬浮运输系统的开发。 2009年时,国内外研究的热点是磁悬浮轴承和磁悬浮列车,而应用最广泛的是磁悬浮轴承。它的无接触、无摩擦、使用寿命长、不用润滑以及高精度等特殊的优点引起世界各国科学界的特别关注,国内外学者和企业界人士都对其倾注了极大的兴趣和研究热情。 2. 磁悬浮技术的应用及展望 20世纪60年代,世界上出现了3个载人的气垫车试验系统,它是最早对磁悬浮列车进行研究的系统。随着技术的发展,特别是固体电子学的出现,使原来十分庞大的控制设备变得十分轻巧,这就给磁悬浮列车技术提供了实现的可能。1969年,德国牵引机车公司的马法伊研制出小型磁悬浮列车模型,以后命名为TR01型,该车在1km 轨道上的时速达165km,这是磁悬浮列车发展的第一个里程碑。在制造磁悬浮列车的
磁悬浮机组介绍
1、前言 电磁悬浮技术(electromagnetic levitation1简称EML技术,是集电磁学、电子技术、控制工程、信号处理、机械学、动力学为一体的机电一体化高新技术。随着电子技术、控制工程、信号处理元器件、电磁理论及新型电磁材料的发展和转子动力学的进展。磁悬浮技术得到了长足的发展。目前人们接触比较多的是磁悬浮列车(图1),应用最广泛的是磁悬浮轴承。由于具有无接触、无摩擦、免润滑、使用寿命长等优点。特别适合于超洁净、低噪音、节能环保等领域。具有国际先进水平 的清华大学能源楼就使用了一台磁悬浮制冷机组。 2、磁悬浮原理 磁悬浮利用磁性“同性相斥,异性相吸”的原理,在轨道和列车间、在轴承的转子和定子间加上相应的电磁场,通过控 制电磁场,使之处于相对“悬浮”状态。 图2为一简单磁悬浮系统,它是由转子、传感器、控制器和执行器4部分组成,其中执行器包括电磁铁和功率放大器两部 分。 在工作过程中,如果转子受到一个任何方向的扰动,就会偏离其原来位置,这时传感器检测出转子偏离原点的位移,作为控制器的微处理器将检测的位移变换成控制信号,然后功率放大器将这一控制信号转换成控制电流,控制电流在执行磁铁中产生磁力,从而驱动转子返回到原来平衡位置。因此。不论转子受到向下或向上的扰动,转子始终能处于稳定的平衡状态。 3、磁悬浮轴承 目前在工业上得到广泛应用的基本上都是传统的磁悬浮轴承(需要位置传感器的磁悬浮轴承),这种轴承需要5个或10个非接触式位置传感器来检测转子的位移。由于传感器的存在,使磁悬浮轴承系统的轴向尺寸变大、系统的动态性能降低,而且成本高、可靠性低。由于结构的限制,传感器不能装在磁悬浮轴承的中间,使控制器设计更为复杂。此外,由于传感器的价格较高,从而加大磁悬浮轴承的成本,限制其在工业上的推广应用。 最近几年,结合磁悬浮轴承和无传感器检测两大研究领域的最新研究成果,出现了新的磁悬浮轴承--无传感器的磁悬浮轴承。它不需要设计专门的位移传感器,转子的位移是根据电磁线圈上的电流和电压信号而得到的。这类磁悬浮轴承在以下几个方面得到了显著的改善和提高:转子的轴向尺寸变小,系统的动态性能得到提高;进一步提高了磁悬浮轴承的可靠性: 便于设计磁悬浮轴承的控制器;成本显著下降。 4、磁悬浮技术在制冷机组上的应用 空调系统的核心设备是制冷机组,制冷机组的核心部件是压缩机。传统制冷机组根据压缩机类型分为离心式制冷机组和
金蝶KIS旗舰版安装配置指南
金蝶KIS 旗舰版安装配置指南
目录 1光盘说明 (3) 2安装方式 (3) 3服务端部件安装 (3) 4客户端部件安装 (10) 5KIS的自动部署 (13) 6常见问题分析与解决 (13) 7帮助与支持 (19)
1光盘说明 金蝶KIS 旗舰版DVD安装光盘一套包括: 2安装方式 目前我公司产品KIS旗舰版支持如下3种安装方式: 1、DVD光驱本机安装: 将DVD光碟直接插入DVD光驱,按照提示安装即可。 2、DVD光驱共享网络安装: 安装前请共享DVD光驱,再访问DVD光驱,按照提示安装即可。 3、DVD光盘拷贝至硬盘共享安装: 先将DVD安装盘拷贝到硬盘,并设置共享,按照提示安装即可。 注意: 为了确保KIS旗舰版安装程序能够正常的运行,推荐运行KIS旗舰版安装程序前,先退出正在运行的第三方软件(包括杀毒软件及相关防火墙),然后再进行KIS程序安装操作。完成KIS旗舰版安装操作后,再启用第三方软件。 3服务端部件安装 3.1服务端配置建议:
能扩展包,两者系统兼容性是一致的。 注解②——只支持Windows Server 2008完全安装,不支持服务器核心安装(Server Core Installation)。同时也支持Windows Server 2008 R2对应版本,Windows Server 2008 R2是基于Windows Server 2008的功能扩展,两者系统兼容性是一致的。 注解④——中间层加密服务不支持在虚拟机(VMWare、Virtual PC等)中运行,加密服务在虚拟机中将总运行为演示版,也不支持License文件导入。但加密服务之外的其他中间层组件可以正常在虚拟机中运行。
磁悬浮球控制系统的仿真研究
磁悬浮球控制系统的仿真研究 王玲玲,王宏,梁勇 (海军航空工程学院,山东烟台 264000) 作者简介:王玲玲(1984—),女,硕士,讲师,主要从事控制技术研究。 本文引用格式:王玲玲,王宏,梁勇.磁悬浮球控制系统的仿真研究[J].兵器装备工程学报,2017(4):122-126. Citation:format:WANG Ling-ling, WANG Hong, LIANG Yong.Simulation and Research of Magnetic Levitation Ball Control System[J].Journal of Ordnance Equipment Engineering,2017(4):122-126. 摘要:针对磁悬浮球系统的本质不稳定性,设计PID控制算法实现系统的稳定控制。建立磁悬浮球系统的动力学模型,并对其中的非线性部分进行平衡点处的线性化,采用根轨迹校正设计超前滞后控制器。最后采用PID控制设计,并使用根轨迹校正中零极点对系统性能影响的思想去调整PID参数,使系统的稳定性、动态性能和稳态性能满足要求。 关键词:磁悬浮球系统;PID;根轨迹法;校正 磁悬浮可以用于实现各种机械结构的高速、无摩擦运转,如高速磁悬浮列车、高速磁悬浮电机、磁悬浮轴承等。尽管磁悬浮的应用领域繁多,系统形式和结构各不相同,但究其本质都具有本质非线性、不确定性、开环不确定性等特征。这些特征增加了对其控制的难度,也正是由于磁悬浮的这些特性,使其更加具有研究价值和意义。本文针对磁悬浮球系统,研究其稳定控制,并使其性能指标满足要求。 1 磁悬浮球控制系统的基本原理 磁悬浮球控制系统主要由铁芯、线圈、光电源、位置传感器、放大及补偿装置、数字控制器和控制对象钢球等部件组成[1],如图1所示。 当电磁铁上的线圈绕组通电时,位于磁场中的刚体受到电磁力的吸引作用。当产生的电磁力与球体的重力相等时,球体悬浮于空中,处于不稳定的平衡状态,当它受到外界扰动时,易失去平衡。因此,为了使系统稳定,就必须加上反馈环节,实现闭环控制,并设计控制算法,使稳定后的性能满足要求。
磁悬浮实验报告
开放性试验: 《磁悬浮原理实验仪制作及PID控制》 试验报告 实验内容:学生通过磁悬浮有关知识的学习,根据已有的试验模型,设计出磁悬浮实验仪器,并进行制作,进而在计算机上用PID技术进行调节和控制。 难点:PID控制程序的编写及调试。 创新点:该实验以机械学院数控所得科研成果为依托,以一种新颖的方式,用磁悬浮小球直观的展示了PID控制理论的应用。该仪器构造简单,成本低廉。此实验综合应用了电磁场、计算机、机械控制等相关知识,具有一定的研究创新性特点。该仪器有望成为中学物理实验仪器,和高校PID 控制实验仪器。 关键问题 1.悬浮线圈的优化设计 2.磁悬浮小球系统模型 3.磁悬浮小球的PID控制 电磁绕组优化设计 小球质量:钢 小球质量:15~20g 小球直径:15mm 悬浮高度:3mm 要求:根据悬浮高度、小球大小、小球重量设计悬浮绕组
绕组铁芯尺寸、线圈匝数、额定电流、线径。 电磁绕组优化设计: 由磁路的基尔霍夫定律、毕奥-萨格尔定律和能量守恒定律,可得电磁吸力为: 式中:μ0——空气磁导率,4πX10-7H/m ; A ——铁芯的极面积,单位m2; N ——电磁铁线圈匝数; z ——小球质心到电磁铁磁极表面的瞬时气隙,单位m ; i ——电磁铁绕组中的瞬时电流,单位A 。 功率放大器中放大元器件的最大允许电压为15V 。为了降低功率放大器件上的压力差,减少功率放大器件的发热,设定悬浮绕组线圈电压该值为12V 。 约束条件:U =12V 电流、电压与电阻的关系 电阻: L ——漆包线的总长度/m S ——漆包线的横截面积/m2 d ——线径的大小/m ε是漆包线线的电阻率,查表可知: ε=1.5*1.75*e-8,单位:Ω*m 根据线圈的结构,可以得出漆包线的总长度为: 2 202??? ??-=z i AN F μU i R =L R S ε=2 14S d π=
金蝶kis专业版安装教程
金蝶kis专业版安装教程1,安装之前先点环境检测 2,如果没有安装组件会提示你安装点确定安装一下 即可
Welconie to the InstalShield Wizard for Setillnel System Driver 5.41.0 (32-bll) Tte Inrtai&hieidtR) Wizard wil install Scrtmel System D TAW 5.41.0cn yx)ur co哼uter? Toccrhnue? ckkNext. 环境吏新訓, 尊的勲5耳註修含辰挨趣0S寺业版的条件..您可以 施时看箱蝕工咪虹5专业成? 3,下面就可以开始安装金蝶KIS 专业版软件了 「应xt 7 I ConcU |
金蝶KIS 4, 安装完毕解压升级补丁运行一下intall.cmd 5,运行加密服务器,点软加密用户注册 敦&?说銅 0耐 丁金臥活左柚i诩淮讦环瞇禺 Kingdee 安專咗掳si:細rT 台 有败公司 安董沆牛 安装建序巳毙處在计3:机中安装金!专业殷. intall? cmd Windows HT命事轴粗 1 KB j ^gs \A8m ini s trat oiA桌E]l 升级 补 社I笑igKun肝?dU
— X 6, 复制你的软件特征码 给店主,然后店主会发key 文件给你激活软件 7, 得到授权文件后点导入授权文 歎件待征码:AfiCD5B&683O2TE83 说明i 如琴胡丰裂充没有注册丿软件特住码是茯译正式版 li C4JIE4丈件的信;&, 第一步 网上注册 启动 ri a □営理匸具 Q 秋天1235不V2 ?5 二输袪灵201 i 囲金!SKI5专业成 M 企峨詁处专哑扳 操作的注册(C)帮助(H) 題爲智能卡用户注扭00 F9 引人lie ease 丈件 件完成注册 ?^nrw 第二步
说明文阅读《高速磁悬浮列车》
说明文阅读《高速磁悬浮列车》 (1)近日,随着国家重点研发计划“先进轨道交通”重点专项“磁浮交通系统关键技术”项目启动,我国时速600公里高速磁浮研发正式拉开序幕。 (2)2016年10月21号,我国轨道交通设备制造商中国中车股份有限公司宣布,将启动时速600公里高速磁浮项目的研发。近日,科技部认证微博再次发文称,该项目由中车青岛四方机车车辆股份有限公司牵头组织实施,将建成一条长度不少于5公里高速磁浮的试验线,研制一列设计时速600公里高速磁浮试验列车。与国外同类高速磁浮相比,悬浮能耗降低35%、电磁铁温升降低40℃、单位有效载荷车辆减重6%以上,最终建成具有影响力的高速磁浮运输系统协同创新与集成化试验平台。形成国际领先的标准规范体系和综合评估及评价方法。 (3)据了解,目前世界上在磁浮方面领先的是日本和德国。日本采用超导磁浮,最高试验时速603公里;德国采用常导磁浮,最高试验时速505公里。上海的磁浮线路采用德国技术,运营时速430公里。据中国之声《央广新闻》报道,科技部表示,这个项目的实施,将使磁浮交通运营的速度达到一个新高度,更进一步提升磁浮交通的舒适度,降低运行能耗,为后高铁时代做好前沿技术的储备。 (4)尽管中国铁路网尤其是高铁网的运营和再建规模、系统很大,但地域广、人口多、中东部地区城市密集的特点,使得中国的点对点大容量高速旅客的运输需求很大,比如上海到北京,成都和重庆之间。北京交通大学教授贾利民认为,磁悬浮技术是一种点对点大容量的运输技术,可以作为现在高速和城际铁路路网系统的有益补充。 1、(2分)与外国同类高速磁浮相比,我国研发的高速磁浮项目的优点是什么? 2、(4分)高速磁浮项目的实施有哪些益处? 3、(2分)指出下列句子所使用的说明方法。(一个括号内只能填写一种说明方法) 与国外同类高速磁浮相比,悬浮能耗降低35%、电磁铁温升降低40℃、单位有效载荷车辆减重6%以上。()() 4、(3分)是什么“使得中国的点对点大容量高速旅客的运输需求很大”?
金蝶K3客户端安装配置
K/3客户端部件安装配置 本文概述 z本文适合K/3 V12.3 Wise创新管理平台 z本文主要介绍客户端部件的安装配置方法,学习完本文后,您可以了解客户端的安装及配置工作。 版本信息 z2012年2月10日V1.0 编写人:李伟 z2012年2月27日V2.0 修改人:陈研鑫 版权信息 z本文件使用须知 著作权人保留本文件的内容的解释权,并且仅将本文件内容提供给阁下个人使用。对于内容中所含的版权和其他所有权声明,您应予以尊重并在其副本中予以保留。您不得以任何方式修改、复制、公开展示、公布或分发这些内容或者以其他方式把它们用于任何公开或商业目的。任何未经授权的使用都可能构成对版权、商标和其他法律权利的侵犯。如果您不接受或违反上述约定,您使用本文件的授权将自动终止,同时您应立即销毁任何已下载或打印好的本文件内容。 著作权人对本文件内容可用性不附加任何形式的保证,也不保证本文件内容的绝对准确性和绝对完整性。本文件中介绍的产品、技术、方案和配置等仅供您参考,且它们可能会随时变更,恕不另行通知。本文件中的内容也可能已经过期,著作权人不承诺更新它们。如需得到最新的技术信息和服务,您可向当地的金蝶业务联系人和合作伙伴进行咨询。 著作权声明著作权所有 2012 金蝶软件(中国)有限公司。 所有权利均予保留。
目 录 1. 系统环境检测 (3) 1.1 环境检测 (3) 2. K/3客户端安装 (4) 2.1 安装客户端部件 (4) 3. 远程组件配置 (8)
1. 系统环境检测 安装K/3客户端之前,首先要对系统环境进行检测,安装第三方的组件。通过资源盘的环境检测功能,可以自动检测系统中缺少哪些组件,之后按照提示安装即可。安装完成之后会提示环境更新完毕。 1.1 环境检测 步骤1:将资源盘放入光驱,系统会自动弹出如图-1所示界面,如果没有弹出界面,需要打开光盘,双击setup.exe即可弹出。单击【环境检测】即可检测系统中缺少的组件。 图-1 环境检测 步骤2:打开金蝶K/3环境检测界面,如图-2所示,选择客户端部件。 图-2 检测客户端部件 步骤3:单击【检测】,系统会提示当前缺少的组件名称,如图-3所示。
上海磁悬浮(高速)列车
上海磁悬浮(高速)列车 Shanghai Maglev (Rapid) Train 上海磁浮示范运营线,是“十五”期间上海市交通发展的重大 项目,也是世界上第一条投入商业化运营的磁浮示范线,具有交通、 展示、旅游观光等多重功能。 上海磁浮示范运营线,西起上海地铁2号线龙阳路站,东到浦 东国际机场,主要解决连接浦东机场和市区的大运量高速交通需求。 线路正线全长约30公里,双线上下折返运行,设计最高运行速度为 每小时430公里,单线运行时间约8分钟。 从2004年3月29日起,磁浮列车调整了运行时间,由“工作 日半天运行、双休日全天运行”调整为每天早8:30至下午5:30全天运行,每20分钟一班,全天双向对开共54班。 同时,为了充分体现磁浮列车的交通优势,凡是搭乘飞机的旅客都可凭其本人当日机票以八折的价格购买磁浮单程票一张,即普通席40元或贵宾席80元。 对荣誉军人、离休干部、残疾人等特殊人群,上海磁浮交通发展有限公司也推出了凭证八折购票的优惠措施。同时,身高120cm 以下的儿童在成人陪同下免票。 车票为当日当班次有效,过期作废。每张车票票面均印有发车 时间,在发车前20分钟开始进站检票,发车前5分钟停止检票,为 了确保您的乘车,请至少在发车前20分钟到达乘车地点的检票口。 地点 : 龙阳路磁悬浮站 票价 : 单程 : 普通席50元,贵宾席100元; 往返程 : 普通席80元,贵宾席160元。 订票热线 : 8008204800、63600688 Maglev Demonstration Line - from Pudong International Airport to Longyang Road Metro Station - the 30-kilometer trip will take only eight minutes. It is the world's first commercial magnetic levitation line.From March 29 2004, It was put into use formally and operates everyday from 8:30am to 17:30pm. The operation interval is 20 minutes . The round trip ticket cost 80 yuan and the one way ticket cost 50 yuan. Passengers with current day flight ticket can buy a one way ticket of Maglev Train at 20% discount. Add : Maglev Train Station of Longyang Rd Price(RMB) : One Way Ticket : 50, 100(VIP)
基于模拟电路的磁悬浮控制系统
基于模拟电路的磁悬浮控制系统 摘要:本文首先简要地介绍磁浮轴承的发展历程和国内外研究、应用状况,接着利用电磁学、电子学和控制理论对磁悬浮的原理进行了分析,建立了系统的数学模型。对电路参数进行分析,设计了基于模拟电路的磁悬浮控制系统。该系统采用电磁永磁混合支持,提高了系统稳定性并降低了系统功耗。 关键词:混合磁悬浮,霍尔传感器 0 引言 人类希望利用磁场力对物体进行无接触支撑的想法由来已久。20世纪初,科学家首次在实验室利用电流的磁效应实现了物体在空中自由悬浮。然而由于磁悬浮技术是一门涉及多种学科的综合性技术,其发展受到了多方面的制约。随着近几十年电子技术、控制工程、信号处理元器件、电磁理论、新型电磁材料及转子动力学的发展,磁悬浮技术才得到了长足的发展。特别是进入上世纪80年代,超导技术首先应用于磁悬浮。超导技术与磁悬浮技术的结合,新材料,新工艺,新器件的出现以及现代控制技术的发展,使电磁悬浮技术趋于成熟,磁悬浮技术有精度高、非接触和消耗能量少等优点。在能源紧张的今天,研究磁悬浮系统具有重要的实际意义。磁悬浮技术不仅可以应用于磁悬浮列车,而且在磁悬浮轴承、磁悬浮飞轮储能、航天器与电磁炮的磁悬浮发射、磁悬浮精密平台、磁悬浮冶炼等方面也有广泛应用。磁悬浮技术有着广阔的商业前景,适合商业应用。例如,磁悬浮可以用于广告牌悬浮、地球仪悬浮,科技展览、沙盘展示(空中楼阁)、悬空高档礼品等。因此,磁悬浮是一种能带动众多高新技术发展的具有广泛前景的应用技术。基于模拟电路的磁悬浮控制系统可以用来研究电磁式磁悬浮固有的开环不稳定性和非线性性。 1 磁悬浮系统的组成及原理分析 磁悬浮旋转装置主要由永磁体、铁芯、线圈、磁场传感器、功率放大器和控制器等组成。其结构如图a所示
PID控制器设计磁悬浮小球控制系统
MATLAB课程设计 课程名称:采用PID控制器设计磁悬浮小球控制系统 学院:电气工程学院 学号:P101813409 姓名:徐敏敏 班级:10级自动化一班 指导教师:杨成慧老师
目录 摘要........................................................1 1.引言.........................................................2 2.系统分析与设计..................................... 5 2.1系统建模及仿真..............................................5 2.2建立磁悬浮小球系统框图....................................7 2.3 PID控制系统..........................................8 2.4 仿真结果分析..............................................13 2.5 总结.....................................................13 2.6 答谢.....................................................13 3.参考文献.......................................................14
摘要: 本文通过对一个磁悬浮小球的分析,简单的描述了磁悬浮列车的原理。控制要求通过调节电流使小球的位置始终保持在平衡位置。通过对磁悬浮小球系统进行数学建模,求出它的系统传递函数,采用PID算法设计调节器,对小球的稳定性进行了分析和仿真,在MATLAB平台仿真获得适当的PID参数范围,进行频域分析,使得磁悬浮小球系统处在平衡状态,在仿真过程中对PI,PD,及PID三种方式进行了比较和分析,对其加入扰动信号,即正弦扰动信号,观察输出波形,对扰动进行分析。本文通过对磁悬浮小球系统的分析,体现了MATLAB的强大功能,突出了它在运算以及作图仿真方面的优势。 关键字: MATLAB, PID控制器, 磁悬浮小球系统,稳定性 1.引言 磁悬浮列车的原理并不深奥。它是运用磁铁“同性相斥,异性相吸”的性质,使磁铁具有抗拒地心引力的能力,即“磁性悬浮”。将“磁性悬浮”这种原理运用在铁路运输系统上,使列车完全脱离轨道而悬浮行驶,成为“无轮”列车,时速可达几百公里以上。这就是所谓的“磁悬浮列车”,亦称之为“磁垫车”。由于磁铁有同性相斥和异性相吸两种形式,故磁悬浮列车也有两种相应的形式:一种是利用磁铁同性相斥原理而设计的电磁运行系统的磁悬浮列车,它利用车上超导体电磁铁形成的磁场与轨道上线圈形成的磁场之间所产生的相斥力,使车体悬浮运行的铁路;另一种则是利用磁铁异性相吸原理而设计的电动力运行系统的磁悬浮列车,它是在车体底部及两侧倒
金蝶EAS客户端安装手册
1,打开安装光盘,找到Client_CDROM的文件夹并打开 2,双击EAS客户端安装文件EASSetup.exe,弹出如下的对话框 3,点击左边的“金蝶EAS客户端”进行安装 4,则会弹出如下的校验文件,看系统配置,可能要等几分钟时间 接着会弹出如下的框框
5,开始安装,如图所示 点击“OK” 6,如下图,点击“下一步”
7,选择“本人接受许可协议条款”,点击“下一步”,如下图所示 8,如下图,点击“下一步”
9,选择安装目录,系统默认安装在C盘根目录下,安装的时候要检查C盘是否够大,客户端安装大概需要900M的空间,要计算如果安装完EAS后C盘是否还能腾出至少1G的空间,否则建议安装在其他盘里。选择好目录后点“下一步” 10,EAS服务器地址填:172.16.12.31 EAS服务器端口:11034
文件更新服务器端口:6888 然后点击“下一步” 剩下的步骤不需要做任何更改,在选择快捷键文件夹界面可以选择把文件夹放在桌面,然后点下一步下一步即可,安装完毕点击“完成”。 11,安装完成之后,在程序中找到金蝶EAS客户端图标,双击启动,刚开始连服务器会检查更细,这个过程可能会有点慢,看机子性能和网络情况而定,启动之后如果能见到更下图所示一模一样的界面则表示安装成功,可以正常启动。 12,如果见不到上面的对话框,在对话框里面会提示“检查更新失败,请与管理员联系,或者强行登陆”之类的提示,则表示连不上服务器,请把进程中的所有javaw进程停止掉,再重新双击客户端图标试试。 13,金蝶EAS客户端是绿色安装方式,在一台机子安装并更新完成之后,可以把这个机子的安装文件拷贝到其他机子中去,但是一定要确保安装路径跟以前的电脑完全一致。例如,在A电脑C盘根目录下安装了EAS客户端,确保可以启动之后,则可以直接把A电脑安装好的文件拷贝到其他电脑C盘的跟目录下,A电脑桌面的快捷键也同样可以拷到其他电脑桌面当快捷键使用。