汽车自适应巡航

汽车自适应巡航
自适应巡航也可称为主动巡航,自适应巡航类似于传统的巡航控制,系统包括雷达传感器、数字信号处理器和控制模块。司机设定所希望的车速,系统利用低功率雷达或红外线光束得到前车的确切位置,如果发现前车减速或监测到新目标,系统就会发送执行信号给发动机或制动系统来降低车速使车辆和前车保持一个安全的行驶距离。当前方道路没车时又会加速恢复到设定的车速,雷达系统会自动监测下一个目标。主动巡航控制系统代替司机控制车速,避免了频繁的取消和设定巡航控制,使巡航系统适合于更多的路况,为驾驶者提供了一种更轻松的驾驶方式。
大众CC和丰田皇冠自适应巡航操作详解
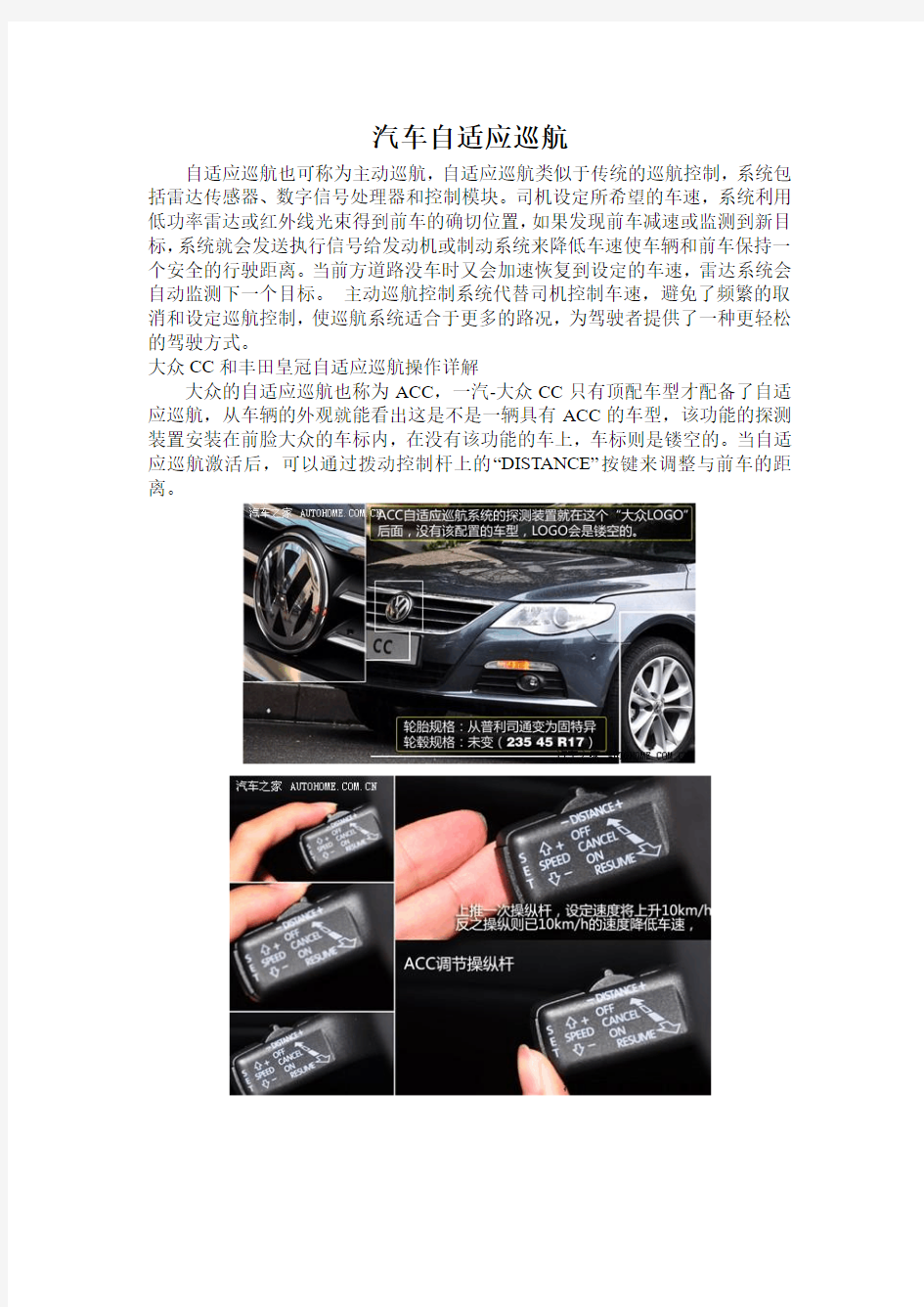
大众的自适应巡航也称为ACC,一汽-大众CC只有顶配车型才配备了自适应巡航,从车辆的外观就能看出这是不是一辆具有ACC的车型,该功能的探测装置安装在前脸大众的车标内,在没有该功能的车上,车标则是镂空的。当自适应巡航激活后,可以通过拨动控制杆上的“DISTANCE”按键来调整与前车的距离。
丰田皇冠的自适应巡航系统只配备在3.0 Royal Saloon 尊享版及其以上的车型中,同大众CC一样,它的自适应巡航的感应装置也隐藏在车标处,你会很容易发现它的车标设计和没有该功能的车型有着明显不同。启动ACC的方法十分简单,在定速巡航状态下,只需按动方向盘上画有小车符号的按钮该功能便会激活,但前提是车速要大于40Km/h。
自适应巡航系统的组成及原理
自适应巡航系统的组成及原理 1.雷达传感器 在ACC系统中,测距雷达用于测量自车与前方车辆的车头距、相对速度、相对加速度,是自适应巡航控制系统中的关键设备之一,也是决定该系统造价的主要元件。其主要组成包括发射天线,接受天线,DPS(数字信号处理)处理单元,数据线等。 毫米波雷达 原理:利用目标对电磁波反射来发现目标并测定其位置,毫米波频率高,波长段。 性能:探测性能稳定,不易受对象表面颜色和形状的影响,也不受大气 流的影响;环境适应性能好,雨、雪、雾等对之干扰小。 单脉冲雷达 原理:雷达每发射一个脉冲,天线能同时形成若干个波束,从各波 束接收的信号之和,可测出目标的距离,从而实现对目标的测量和跟踪。(脉冲:一个物理量在短持续时间内突变后迅速回到其初始状态的过程) 性能:全天候雷达,可以适用各种天气情况,具有探测距离远、探测角 度范围大、踪目标多等优点,但价格高。 微波雷达 原理:微波雷达对运动物体的精确速度检测基于微波多普勒(Doppler)效应。 通过测量回波信号相对发射信号的时间延迟来测距。 性能:着安装维护方便、使用寿命长、几乎不受光照度、灰尘以及风、 雨、雾、雪等天气的影响。
激光雷达 原理:激光器产生并发射一束光脉冲,打在物体上并反射回来,最 终被接收器所接收。接收器准确地测量光脉冲从发射到被反射回的传播时间。因为光脉冲以光速传播,所以接收器总会在下一个脉冲发出之前收到前一个被反射回的脉冲。鉴于光速是已知的,传播时间即可被转换为对距离的测量。 性能:对工作环境的要求较高,对天气变化比较敏感,在雨雪天、风沙 天等恶劣天气探测效想探测范围有限,跟踪目标较少,但其最大的优点在于探测精度比较高,价格低,易于控制和进行二次开发。 红外探测雷达 原理:不同种类的物体发射出的红外光波段是有其特定波段的,人们 可以利用这种特定波段的红外光来实现对物体目标的探测与跟踪。 性能:在恶劣天气条件下性能不稳定,探测距离较短,价格最便宜。 2.电子控制单元(ECU) ACC系统中的核心部分 组成:和普通的单片机一样,由微处理器(CPU)、存储器(ROM、、RAM)、输入/输出接口(I/O)、模数转换器(A/D)以及整形、驱动等大规模集成电路组成。 作用:根据其内存的程序和数据对空气流量计及各种传感器输入的信息进行运算、处理、判断,然后输出指令。 3.其余组成部分: 巡航控制开关,车速设定器,车距设定器,状态显示器,报警器…… 4.相互联系
ACC自适应定速巡航系统
广汽菲克全新自由光配置表 ACC自适应定速巡航系统 是一款智能化的车速自动控制系统。启动该功能后,正常路况下,车辆会自动按照设定的车速进行巡航,驾驶员无需控制油门踏板。当前方有车辆进入或前车减速的时候,系统会自动降低车速,并和前车保持设定的距离。当监测到车距太近时,系统会主动介入刹车帮助减速,而当前方车辆离开,或是车速加快时,又将自动回复到驾驶人原本设定的速度。ACC自适应巡航在长途驾驶、车队出行等情况下,能够方便驾驶人员以更轻松舒适的状态控制车辆。自由光的增强型ACC,有以下特点:1、具备跟停功能。在低速状况下,ACC根据前车状态可以将车速降到完全停止。2、车速从0~160km/h均可设定ACC,确保了城市低速情况下的适用性。 盲区监测系统 自由光能够通过前后雷达,监测侧后方车轮“外3米后7米”的范围,当发现有车辆进入,会在后视镜显示图标警示。当发现驾驶员打转向灯后,将提出蜂鸣警报。 车道偏离警示 当车速在60-160km/h范围内饰,系统会实时侦测路面轨迹,一旦发现车辆出现偏离状况,及时提醒避险。同时,系统将对方向盘施加一个修正力,帮助方向盘回复到正常行驶轨迹。 双向泊车辅助 停车入位的剐蹭,也属于城市驾驶的常见事故。自由光能够实现平行垂直双向智能泊车,驾驶员只需要按照系统提示,控制油门刹车和档位,系统自动控制方向盘,准确停入车位。
电子驻车辅助 自由光采用电子按扭和电动机动作来替代传统的手刹。 更具美感,占用空间小; 轻松省力,操作简便; 能够实现智能化驻车,避免“忘了释放手刹”的事故。 HAS上坡辅助 为了帮助驾驶员在坡道上轻松停车和起步,自由光配置了HAS上坡辅助功能。当在坡道上松开刹车时,2秒钟内,系统能够通过电子驻车功能,控制车辆稳定停止,防止溜车。 主动胎压监测 主动胎压监测TPMS系统,与安全气囊、ESC并称为汽车三大安全系统。当轮胎内的感应器监测到气压 异常时,系统会自动报警。帮助驾驶人即使了解轮胎情况,避免安全隐患。 业内首创8.4+7双液晶人机交互系统 7寸数字化仪表,8.4寸触摸屏幕,类平板电脑的操作方式,极为简易的UCONNECT?智能语音人机交互 信息系统,可以帮助车辆使用者非常便利完成个性化设置。同时,依靠最强大的连接技术(触控、键控、以及声控),实现在驾乘中最便捷的控制。双手无需离开方向盘,只要动一下手指,或通过语音指令,近乎灵感式的操作,就可以完成大部分行车中的功能。 FCW前撞预警系统, 利用位于前挡风玻璃内的摄像头及雷达传感器,侦测到前方区域有行进中的车辆因距离过 近可能导致危险发生时,将以声响警示驾驶人注意路况。 ?倘若驾驶人并未及时反应,系统将自动进行刹车,以降低与前车发生碰撞的风险。
车辆自适应巡航控制系统(ACC)设计
车辆自适应巡航控制系统(ACC)设计与分析 65090617付裕 一、引言 ACC系统全称就是自适应巡航控制系统,它是一种智能化的行车自动控制系统,它是在早已存在的定速巡航控制技术的基础上发展而来的。在行驶过程中,安装在车辆前部的车距传感器会持续扫描车辆前方道路,同时轮速传感器采集车速信号。当与前面的车之间的距离过小时(这可以在车内设定距离),ACC控制单元可以通过与制动防抱死系统、发动机控制系统协调动作,使车轮适当制动,并使发动机的输出功率下降,同时车内音响会发出警报声音提醒走神的驾驶员注意,它能有效的防止追尾这类事故的发生。 本文将通过连续系统设计与分析的知识对ACC系统进行分析。 二、研究对象工作过程和要求描述 1.控制原理: 电控单元有两个输入信号,当测出的实际车速高于或低于驾驶员调定的车速时,电控单元将这两种信号进行比较,得出两信号之差,即误差信号,再经放大、处理后成为油门控制信号,送至油门执行器,驱动油门执行器动作,调节发动机油门开度,以修正两输入车速信号的误差,从而使实际车速很快恢复到驾驶员设定的车速,并保持恒定。 2.系统框图如下:
三、被控对象的数学模型建立 m ——汽车质量 g ——重力加速度 f ——滚动阻力系数 C ——空气阻力系数 A ——等效迎风面积 r ——轮胎半径 gi ——变速器速比 di ——主减速器速比 η——传动效率 当获取了自适应巡航状态下的速度控制目标ad后,整车期望转矩 四、控制系统的控制器模型设计 经查询资料可知发动机工作模式下的传递函数如下 综合查询的数据与发动机、变速箱、节气门控制器等传递函数可得,ACC系统的传递函数如下
车辆自适应巡航控制系统(ACC)设计
车辆自适应巡航控制系统()设计与分析 65090617付裕 一、引言 系统全称就是自适应巡航控制系统,它是一种智能化的行车自动控制系统,它是在早已存在的定速巡航控制技术的基础上发展而来的。在行驶过程中,安装在车辆前部的车距传感器会持续扫描车辆前方道路,同时轮速传感器采集车速信号。当与前面的车之间的距离过小时(这可以在车内设定距离),控制单元可以通过与制动防抱死系统、发动机控制系统协调动作,使车轮适当制动,并使发动机的输出功率下降,同时车内音响会发出警报声音提醒走神的驾驶员注意,它能有效的防止追尾这类事故的发生。本文将通过连续系统设计与分析的知识对系统进行分析。 二、研究对象工作过程和要求描述 1.控制原理: 电控单元有两个输入信号,当测出的实际车速高于或低于驾驶员调定的车速时,电控单元将这两种信号进行比较,得出两信号之差,即误差信号,再经放大、处理后成为油门控制信号,送至油门执行器,驱动油门执行器动作,调节发动机油门开度,以修正两输入车速信号的误差,从而使实际车速很快恢复到驾驶员设定的车速,并保持恒定。 2.系统框图如下:
三、被控对象的数学模型建立 m ——汽车质量 g ——重力加速度 f ——滚动阻力系数 C ——空气阻力系数 A ——等效迎风面积 r ——轮胎半径 ——变速器速比 ——主减速器速比 η——传动效率 当获取了自适应巡航状态下的速度控制目标后,整车期望转矩 四、控制系统的控制器模型设计 经查询资料可知发动机工作模式下的传递函数如下 综合查询的数据与发动机、变速箱、节气门控制器等传递函数可得,系统的传递函数如下
五、仿真结果单位阶跃响应: 伯德图
技术解读:自适应巡航控制(ACC)与车道偏离预警系统
技术解读:自适应巡航控制(ACC)与车道偏离预警系统 对于汽车产品而言,解决驾驶者的实际需求是一切新技术开发的根本点,本着这一原则,我们看到了ESP为车辆的动态行驶提供了安全保障,灯光随动转向技术解决了夜间行车视野不足的困扰,刹车辅助功能则可以帮助我们在危机时刻更好的控制车辆的制动力输出。而今天为大家介绍的这两项新技术对于高速驾驶的安全保障起到了不同寻常的积极 意义。一:自适应巡航控制功能(ACC)自适应巡航系统是基于普通的巡航定速系统延伸发展而成的,普通的巡航定速对于现阶段汽车配置来说已经是常见的功能之一了,大多数车辆均可加装,而成本也不过几百元。但是该功能非常简单,只能将车速保持在驾驶员预先设定的数值上,而不能根据实际路况对车辆的行驶状态进行调节或者给予必要的预警提示,所以虽然可以暂时缓解右脚因长时间控制油门踏板而产生的压力,但驾驶员仍然必须时刻集中注意力关注车辆的行驶状况,普通巡航定速会因为踩刹车而失去效果,恢复时则需从新设定。这样繁琐的操作在遭遇车辆较多的复杂路况时往往会使驾驶员手忙脚乱,其便利性也大打折扣。 自适应功能的诞生使巡航定速系统的易用性提升到了新的 高度,它不仅简便了以往复杂的操作流程,而且在实际用途方面也极大的提高了车辆行驶的安全性。与普通巡航定速不
同,自适应巡航系统拥有雷达车距传感器,轮速传感器以及ACC电子控制单元,通过这个系统的相互作业对车速进行主动干预,使车辆按照驾驶员预设参数始终保持在一个相对安全的范围内行驶。 自适应系统一般可以在40-150公里内进行车速设定,而因雷达性能不同,其工作范围一般为120-200米。因此驾驶员可以针对路况设定一个合理的跟车车距和巡航速度,当前方车辆出现突发性减速造成实际车距小于等于预设跟车车距时,自适应系统的控制电脑会及时通过车轮制动和调节发动机输出功率的方式使车速下降,并保持预设车距和前车以相同的速度行驶,当前车车速上升时,控制电脑将会自动将车速匀速提升至预设车速,使车辆从新回到巡航状态。 自适应巡航控制的确提升了高速行驶的舒适性能,而且起到了非常必要的控制和预警作用。但是必须重申,该功能并不具有全力制动的效果,也并不能刹停车辆,所以在行车过程中依然要靠驾驶员对车辆进行最终状态的操作。时刻保持注意力集中才是安全防患的重中之重。二:车道偏离预警系统自适应巡航控制让我们在高速时可以相对解放右脚的工作,但长时间处于一个相对单调的环境中很容易使人产生疲劳。而因为疲劳或注意力不集中所造成短暂的对方向控制产生偏差也十分常见的现象,这样看似不经意的行为,却着实存在着极大的安全隐患,一旦车辆出现无遇见性的车道偏离加
自适应巡航控制系统(ACC)
自适应巡航控制系统(ACC) 自适应巡航控制系统传感器安装总图→相关章节。 关于自适应巡航控制系统的一般说明→相关章 节 用ACC 校准设备-VAS 6190-进行校准的流程,见→相关章节。用ACC 校准设备-VAS 6430-进行校准的流程,见→相关章节。拆卸和安装ACC 传感器→相关章节。 自适应巡航控制系统传感器装配一览图
1 - 传感器 拆卸和安装 → 相关章节 2 - 定位点 用于直立销 3 - 插销
提示 支架中的立销是预调好的。不允许改变其设定。 4 - 支架 5 - 插头 松开时挤压两个卡箍,如-箭头-所示。 1. ACC 概述 间距调节传感器和间距调节控制器-J428-安装在一个壳体。传感器或控制器损坏时,必须整体更换。 以下描述时,传感器及控制器称为传感器。 传感器的雷达盖板位于前保险杠盖板后面,并由可通过雷达波的材料制成。所有改变,如后来的喷漆、粘贴的标签等都可能导致功能故障。 传感器受到污染时也可导致功障碍。为此请按照维修手册拆下传感器前的装饰格栅或散热器格栅,并清洁装饰格栅或散热器格栅的侧和传感器。 在进行自适应巡航系统调节前,首先必须查询故障记忆并排除故障。 在ACC 控制单元的测量值块2中可识别,传感器是否仅略微移动,不超过0.5°的失调角不需要重新调校。 自适应巡航系统调校必须使用经大众/ 奥迪许可的四轮定位仪和调校装置进行! 正确调校是保证ACC 功能完好的前提。 提示
以下情况需要重新正确调校: 已调整过后桥前束。 已更换整个雷达传感器。 保险杠横梁已松开过或移动过。 前端上有损坏。 失调角大于0.5°。 用ACC 调校装置-VAS 6190-进行校准
汽车定速巡航系统
南通航运职业技术学院毕业论文(作业) 班级:汽修3112班专业:汽车检测与维修题目:汽车定速巡航系统 学生姓名:孙美松 指导老师:成诚 2014年6月16日
目录 0 引言 (1) 1 汽车巡航控制系统简介 (1) 1.1 意义 (1) 1.2 功能 (2) 1.3汽车巡航控制系统的类型 (2) 2 原理与构成 (2) 2.1 原理 (2) 2.2 构成 (3) 3 应用 (5) 4 国内外汽车巡航控制系统发展现状 (6) 4.1 国外发展情况 (6) 4.2 国内发展情况 (6) 4.3巡航控制系统延伸发展 (7) 5 现存问题与发展趋势 (7) 5.1 现存问题 (7) 5.2发展趋势 (8) 6 结束语 (8) 参考文献: (8) 感谢词 (8)
汽车定速巡航系统 汽修3112 孙美松 (南通航运职业技术学院交通工程系,江苏南通226010)摘要:本文论述了汽车定速巡航系统(CRUISE CONTROL SYSTEM)的作用、原理、发展趋势,同时对其原理、操作方法、检测方法和加装方法等做更深一成的解析。 关键词:巡航原理、巡航控制系统、应用、发展趋势、 0 引言 汽车巡航系统CCS(Cruise Control System)自1961年在美国白宫首次应用以来,已经成了高档轿车的标准装配。当汽车在高速公路上行驶时,接通巡航控制开关,设定目标车速,巡航控制系统将根据汽车行驶阻力的变化,自动增大或减小节气门开度,使汽车设定的车速匀速行驶,以减轻驾驶员的劳动强度。采用巡航控制以后,避免了驾驶员操纵加速踏板,使汽车车速反复变化造成了运行工况频繁变化,因此,不论是汽车的经济性、排放控制,还是行驶平顺性、乘坐舒适性都得到很好的改善。新款宝来在原有装备基础上,又增加了ESP(电子稳定程序)和CCS(巡航控制系统,德文缩写是GRA)选装装备,并对车型作了新的定义,分为基本型、舒适型、豪华型、尊贵型等,汽车巡航控制系统(CCS)就是为解决此问题而诞生的。 1 汽车巡航控制系统简介 1.1 意义 1.1.1定义 定速巡航系统(CRUISECONTROLSYSTEM)缩写为CCS,又称为定速巡航行驶装置、速度控制系统、自动驾驶系统等。按司机要求的速度合开关之后,不用踩油门踏板就自动地保持车速,使车辆以固定的速度行驶。采用了这种装置,当在高速公路上长时间行车后,司机就不用再去控制油门踏板,减轻了疲劳,同时减少了不必要的车速变化,可以节省燃料。汽车在行驶中通过操纵调整开关,驾驶员不必踩踏油门调整车速,汽车也能以设定的车速进行定速行驶。 1.1.2作用 汽车在采用了巡航控制系统(CCS)行驶时,驾驶员无需踩踏加速踏板,尤其在安装自动变速器的汽车中,因不需使用离合器,只需手握方向盘就可轻松驾驶,从而驾驶员的右脚能过解放出来,减轻了驾驶员的疲劳强度,使整个驾驶过程变得舒适、轻松和简便,降低了交通事故发生概率、提高了行车安全性。此外,使燃油的供给和发动机功转速处于最佳配合状态,减少有害气体排放,有效降低燃油消耗,提高汽车的经济性和环保性,减少磨损延长寿命。
汽车自适应巡航控制系统的发展_张洪月概要
汽车自适应巡航控制系统的发展 张洪月,丁惜瀛,于华,裴延亮 (沈阳工业大学,沈阳 110870) 摘要:介绍了汽车自适应巡航控制(ACC )系统结构与工作原理。综述了ACC 系统的发展;详细阐述了ACC 系统控制方法的研究现状;重点介绍了国外ACC 控制策略及国内ACC 控制技术发展概况;其中,ACC 系统多采用分层控制方式。上层控制器将速度转换成期望的加速度输入到下层控制器,下层控制器对节气门进行控制。这种上下两层的控制结构分工明确,满足了多项控制要求。指出了ACC 当前存在的问题,即ACC 控制器存在非线性及换挡是时间滞后的问题;最后提出了ACC 今后的发展趋势。 关键词:ACC ;控制策略;分层控制 Development of Vehicle Adaptive Cruise Control ZHANG Hongyue, DING Xiying,YU Hua,PEI Yanliang (Shenyang University of Technology, Shenyang 110870, China Abstract: This paper reviewed the automobile adaptive cruise control (ACC system structure and working principle. Reviewed the development of the ACC system; Describes the ACC system control method of the research situation; Focusing on the development of foreign ACC control strategy of and domestic ACC control technology situation; Among them, most ACC system used layered control mode. Top controller will convert the speed to the desire acceleration as the input to the lower controller. Then lower controller control the throttle. The fluctuation two layers of control structure, meet a clear division of several control requirements. Points out the existing problems of ACC, namely the ACC controller nonlinearity existing and shift is time lag problem; Finally put forward the ACC developing trend in the future. Keywords: ACC, control strategies, layered control
基于PID的汽车定速巡航控制系统的研究
基于PID的汽车定速巡航控制系统的研究 摘要:随着汽车工业和公路运输业的发展,汽车会越来越普及,人们将需要更加舒适、简便和安全的交通工具。汽车巡航控制系统是一种辅助驾驶系统,它不但可以减轻驾驶员的负担,还可以提高驾车的舒适性。汽车巡航控制系统具有非线性、时变不确定性,并受到外界扰动、复杂的运行工况等影响,采用传统PID控制很难取得满意的效果,本文介绍了一种基于模糊PID控制算法的汽车巡航控制系统。 本文首先阐述了汽车巡航控制系统的历史背景、在国内外的研究应用现状及其发展趋势,并详细介绍了巡航控制系统的构成。通过对一种采用闭环控制的巡航控制系统进行分析,阐述了巡航控制系统的控制原理。 然后,本文对汽巡航控制系统进行了简要的分析,将模糊PID控制方法作为其控制方案,并设计出系统的模糊控制器。以轿车为对象,分析了汽车在行驶过程中的驱动力及受到的各种阻力和干扰力,并建立起汽车纵向动力学模型。利用MATLAB建立了系统的仿真模型,并对汽车巡航控制系统进行了仿真和分析。由仿真结果可知,模糊PID控制方法能使系统相应的超调减小、反应速度加快、控制效果良好,是一种适用于汽车巡航控制系统的控制方法。 论文的内容是基于传统的汽车巡航控制系统,对现有的PID控制进行完善和优化。发挥模糊控制的优势对现有的汽车巡航控制系统进行改进,令控制过程具有一定的智能水平。有助于提高巡航控制的效果,减少车速变化,最大限度节省燃料,降低排气污染,提高发动机的使用效率,改善汽车动力性和乘坐舒适性。最后利用MATLAB软件中的模糊逻辑工具箱对系统的设计进行仿真,验证系统设计的可行性,观察模糊控制的效果,并对部分基础电路进行设计。通过仿真结果分析得出平均巡航响应时间加快了15.9秒,响应超调量平均减小了15.02%。有助于模糊控制在汽车巡航系统中应用的普及。 关键词: 巡航控制系统; MATLAB; 模糊PID; 仿真
自动驾驶的ACC自适应巡航系统的组成及原理
自动驾驶的ACC自适应巡航系统的组成及原理 全自动驾驶汽车在未来几年中一定会普及到我们身边来,谷歌已经计划在2020年时全球在路上跑的自动驾驶汽车达到1千万辆。其实,自动驾驶汽车的一些基本科技配置在我们现在的许多车型上已经有配备了。比如自适应巡航系统,几乎成了豪华车的标配。但什么是自适应?雷达有什么用?巡航控制控制啥? 其实巡航控制很早就有了,18世纪时诞生了最早版本的巡航控制,它的作用是为了阻止蒸汽机的运转过快。后来,巡航控制系统被连接到速度表以及驱动轴上,用来计算行车速度,然后利用电脑控制油门来维持司机预先设定的速度。如今,这一切动作都被整合到一个小黑盒中——ECU。在减少驾驶员体力消耗的同时,巡航控制还能够稍稍提高燃油经济性。 定速巡航最初流行起来是在美国,因为长直宽的洲际公路特别多,许多司机需要长途驾驶,为了减少驾驶疲劳,定速巡航就这么开始流行了。而在欧洲,因为小路多,转弯多,定速巡航这一配置最早仅仅被看成是高端豪华车的象征。不过现在,定速巡航还是普及了起来,现代化的电子技术成本降低,使得这个当年豪车上的配置也装备到了普通家用车中。 用过定速巡航功能的朋友都知道,要么在高速上不堵车的路况下,或者在凌晨3点空旷无人的大街上才能用它。而在实际的生活中,我们经常遇到交通拥堵的情况,时而加速时而刹车,定速巡航似乎成了摆设,于是自适应巡航控制(ACC)应运而生。 ACC自适应巡航控制系统 ACC(Adaptive Cruise Control)自适应巡航控制系统(以下简称ACC)是一种基于传感器识别技术而诞生的智能巡航控制,相比只能根据驾驶者设置的速度进行恒定速度巡航的传统巡航控制系统,ACC可以对于前方车辆进行识别,从而实现了“前车慢我就慢,前车快我就快”的智能跟车的效果,目前根据使用速度区段,可分为基本版ACC(30-150km/h)和全速ACC(0-150km/h)。其中,基本版ACC的传感器为雷达,而全速ACC则是在雷达为主要传感器的前提下,加入了前视摄像头等其他传感器的辅助识别,以满足低速时对于识别精度和角度的更高要求。
自适应巡航控制系统
自适应巡航控制系统 来源: 本站原创作者:李少军编辑:本刊编辑部时间:2006-6-20 14:46:19 随着汽车保有量的增加,交通不仅变得十分拥堵,而且交通事故不断增加。为了使车辆能够自动预防交通碰撞事故,设计人员在汽车上安装了各种主动安全装置,例如测距雷达和后视镜盲点探测器等,这些装置在必要时可以通过声光的形式提醒驾驶者,并通过车载系统自动对车速和车辆间距等行车数据进行调整,从而有效地避免交通事故的发生。在宝马E90新3系轿车上,就选装了由德国博世公司提供的驾驶辅助系统——自适应巡航控制(ACC)系统,宝马新3系是应用这项技术的第一款中型轿车。其实,很多汽车零部件公司都有自适应巡航控制系统或类似功能的产品,例如德国大陆公司生产的主动距离向导系统。 系统组成 自适应巡航控制系统主要由车距传感器(雷达)、轮速传感器、转向角传感器以及ACC 控制单元等组成。车距传感器(图1)一般安装在散热器格栅内或前保险杠的内侧,它可以探测到汽车前方200 m左右的距离;在前后车轮上装有轮速传感器(与ABS系统共用),可以感知车辆的行驶速度;转向角传感器用来判断车辆行驶的方向;ACC控制单元采集各个传感器的信号并进行计算,以便可以适时地与发动机控制单元和制动防抱死控制单元交换数据。 图1 宝马E90新3系轿车车距传感器 工作原理 自适应巡航控制系统是一种智能化的自动控制系统,它是在早已存在的巡航控制技术的基础上发展而来的。在车辆行驶过程中,安装在车辆前部的车距传感器(雷达)持续扫描车辆前方道路(图2),同时轮速传感器采集车速信号。当与前车之间的距离过小时,ACC控制单元可以通过与制动防抱死系统、发动机控制系统协调动作,使车轮适当制动,并使发动机的输出功率下降,以使车辆与前方车辆始终保持安全距离。自适应巡航控制系统在控制车辆制动时,通常会将制动减速度限制在不影响舒适的程度,当需要更大的减速度时,ACC 控制单元会发出声光信号通知驾驶者主动采取制动操作。当与前车之间的距离增加到安全距离时,ACC控制单元控制车辆按照设定的车速行驶。 图2 车距传感器持续扫描前方道路 虽然自适应巡航控制系统可以自动控制车速,但在任何时候驾驶者都可以主动进行加速或制动。当驾驶者在巡航控制状态下进行制动后,ACC控制单元就会终止巡航控制;当驾驶者在巡航控制状态下进行加速,停止加速后,ACC控制单元会按照原来设定的车速进行巡航控制。 系统扩展功能
汽车自动巡航技术(定速巡航自动控制系统)讲解
汽车自动巡航技术(定速巡航自动控制系统) 讲解 汽车定速巡航自动控制系统(CCS)在高速长途行驶时,可采用常速巡行自动控制系统,恒速行驶装置将根据行车阻力自动调整节气门开度,驾驶员不必经常踏油门以调整车速。若遇爬坡,车速有下降趋势,微机控制系统则自动加大节气门开度;在下坡时,又自动关小节气门开度,以调节发动机功率达到一定的转速。当驾驶员换低速挡或制动时,这种控制系统则会自动断开。 汽车自动巡航技术(定速巡航自动控制系统) 很多人都被迫天天面对着拥堵的用车环境,在他们眼中,定速巡航是非常鸡肋的一项功能,车买了好几年,但巡航功能一次没用过的大有人在。那么,巡航功能真的就这般无用,甚至连试一试的必要都没有吗?答案当然是否定的。 北京被戏称为“首堵”,500万辆机动车的保有量,确实让原本宽阔的道路变得拥挤不堪。但不可否认的是,在非高峰时期或车流量相对小的地段,跑到80-90公里的最高限速并非不可能。而对于外地朋友来说,或许在城市中难得有机会超过60公里/小时,但是每年总得跑些高速吧。所以,配置有巡航功能的车肯定是有用的,关键在于了解使用巡航能带来什么好处,只有尝到了甜头的人们,才会不断去尝试。 巡航的最大优势:能减轻长时间驾驶的疲劳;提高车辆的经济节油表现。如果你对这两点感兴趣,那不妨系统的了解巡航控制功能。
你知道巡航控制功能最早出现在什么时候吗?是1788年,只不过当时是运用在蒸汽机车上,用来在爬坡和下坡时保持匀速。但是所谓的现代汽车巡航系统发源于美国,从1945年被发明,到1958年第一次装配在量产车上至今已是半个世纪了。 简单的说巡航控制系统就是通过监测车速传感器,并比对所设定的巡航数据,不断调整适合的油门(节气门)开度,以保持车辆匀速行驶。 但在目前的科技环境中,巡航控制绝不是如此简单的一套理论,它早已从最传统的拉线式控制演变为全电子式控制,并且,现在市面上的高端车(车联网https://www.360docs.net/doc/ae4839224.html,)都开始配置自适应巡航系统(主动巡航),能自动保持设定的前车距离,必要时会紧急制动确保安全。 说了这么多理论,巡航到底如何用呢?每个品牌和车型几乎都有自己的巡航系统,它们之间大同小异,只是在安装位置和控制方式上有所不同,不过,使用巡航之前,最好详细阅读随车所带说明书,这样能更好的避免错误操作带来的安全隐患。