AFM原理
以下为AFM的原理图及其说明。
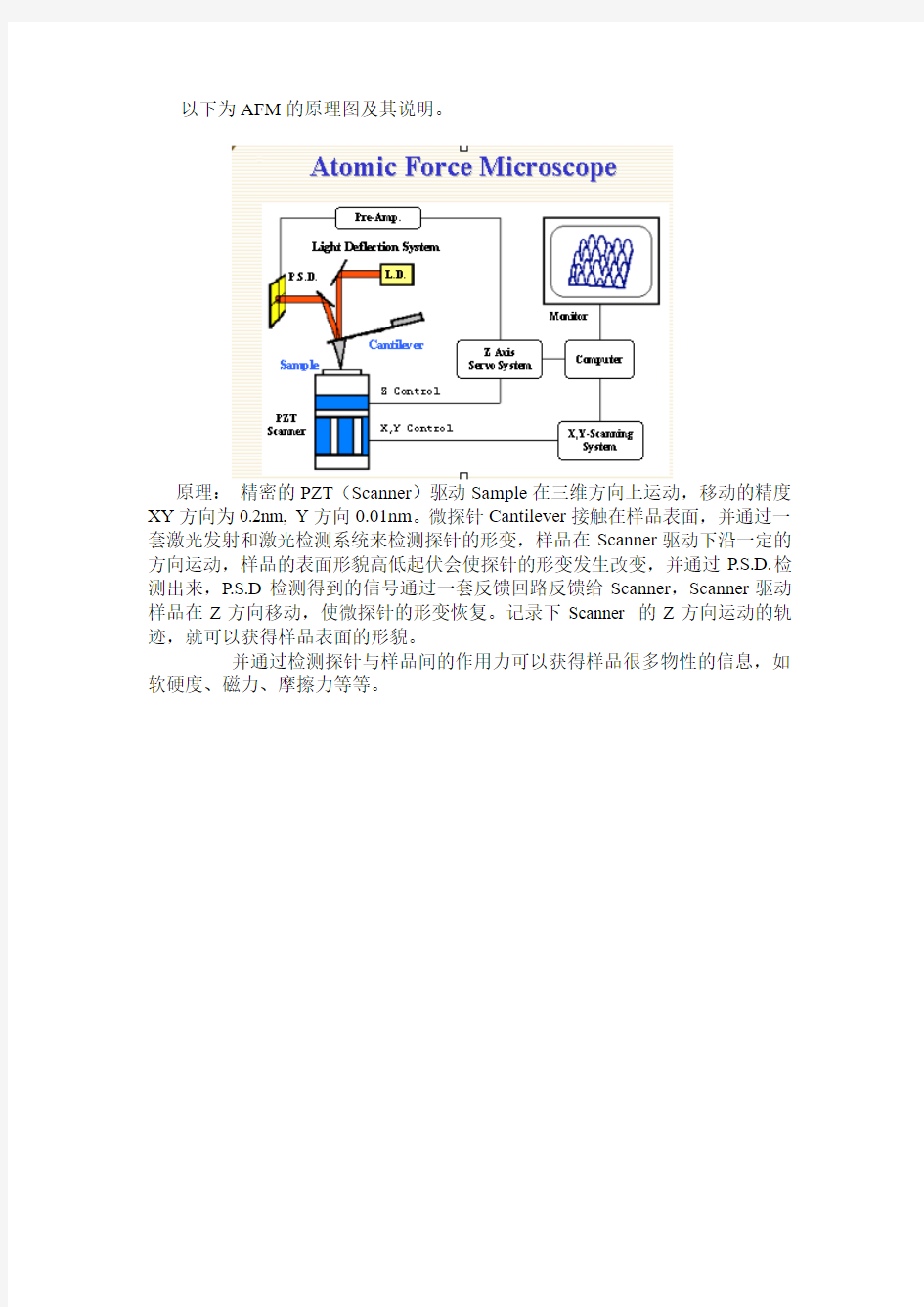
原理:精密的PZT(Scanner)驱动Sample在三维方向上运动,移动的精度XY方向为0.2nm, Y方向0.01nm。微探针Cantilever接触在样品表面,并通过一套激光发射和激光检测系统来检测探针的形变,样品在Scanner驱动下沿一定的方向运动,样品的表面形貌高低起伏会使探针的形变发生改变,并通过P.S.D.检测出来,P.S.D检测得到的信号通过一套反馈回路反馈给Scanner,Scanner驱动样品在Z方向移动,使微探针的形变恢复。记录下Scanner 的Z方向运动的轨迹,就可以获得样品表面的形貌。
并通过检测探针与样品间的作用力可以获得样品很多物性的信息,如软硬度、磁力、摩擦力等等。
原子力显微镜的原理及使用
原子力显微镜的原理及使用 通过近代物理实验课的学习,了解了许多仪器的工作原理以及使用方法,对今后的科研学习有很大的 帮助。其中原子力显微镜就是其中之一,对于做材料方面的专业来说,原子力显微镜在表征物质的表面结 构及性质起着重要的作用。前段时间我们利用AFM对用RF磁控溅射制备的PZT薄膜进行了表征,通过对AFM的使用并查找相关文献,使我对原子力显微镜有了更加深刻的认识。 原子力显微镜,英文:Atomic Force Microscope ,简写: AFM。是一种利用原子,分子间的相互作用力来观察物体表面微观 形貌的新型实验技术.它有一根纳米级的探针,被固定在可灵敏操 控的微米级弹性悬臂上.当探针很靠近样品时,其顶端的原子与样 品表面原子间的作用力会使悬臂弯曲,偏离原来的位置.根据扫描 样品时探针的偏离量或振动频率重建三维图像.就能间接获得样品 表面的形貌或原子成分。 它主要由带针尖的微悬臂、微悬臂运动检测装置、监控其运 动的反馈回路、使样品进行扫描的压电陶瓷扫描器件、计算机控 制的图像采集、显示及处理系统组成。微悬臂运动可用如隧道电 流检测等电学方法或光束偏转法、干涉法等光学方法检测,当针 尖与样品充分接近相互之间存在短程相互斥力时,检测该斥力可获得表面原子级分辨图像,一般情况下分 辨率也在纳米级水平。AFM测量对样品无特殊要求,可测量固体表面、吸附体系等。 一、仪器结构: 在原子力显微镜(Atomic Force Microscopy,AFM)的系统中,可分成三个部分:力检测部分、位置 检测部分、反馈系统。 1、力检测部分 在原子力显微镜(AFM)的系统中,所要检测的力是原子与原子之间的范德华力。所以在本系统中是 使用微小悬臂(cantilever)来检测原子之间力的变化量。微悬臂通常由一个一般100~500μm长和大约500nm~5μm厚的硅片或氮化硅片制成。微悬臂顶端有一个尖锐针尖,用来检测样品-针尖间的相互作用力。这微小悬臂有一定的规格,例如:长度、宽度、弹性系数以及针尖的形状,而这些规格的选择是依照样品 的特性,以及操作模式的不同,而选择不同类型的探针。 2、位置检测部分 在原子力显微镜(AFM)的系统中,当针尖与样品之间有了交互作用之后,会使得悬臂cantilever摆动,所以当激光照射在微悬臂的末端时,其反射光的位置也会因为悬臂摆动而有所改变,这就造成偏移量 的产生。在整个系统中是依靠激光光斑位置检测器将偏移量记录下并转换成电的信号,以供SPM控制器作 信号处理。 3、反馈系统 在原子力显微镜(AFM)的系统中,将信号经由激光检测器取入之后,在反馈系统中会将此信号当作 反馈信号,作为内部的调整信号,并驱使通常由压电陶瓷管制作的扫描器做适当的移动,以保持样品与针 尖保持一定的作用力。 AFM系统使用压电陶瓷管制作的扫描器精确控制微小的扫描移动。压电陶瓷是一种性能奇特的材料, 当在压电陶瓷对称的两个端面加上电压时,压电陶瓷会按特定的方向伸长或缩短。而伸长或缩短的尺寸与 所加的电压的大小成线性关系。也就是说,可以通过改变电压来控制压电陶瓷的微小伸缩。通常把三个分 别代表X,Y,Z方向的压电陶瓷块组成三角架的形状,通过控制X,Y方向伸缩达到驱动探针在样品表面 扫描的目的;通过控制Z方向压电陶瓷的伸缩达到控制探针与样品之间距离的目的。 原子力显微镜(AFM)便是结合以上三个部分来将样品的表面特性呈现出来的:在原子力显微镜(AFM)的系统中,使用微小悬臂(cantilever)来感测针尖与样品之间的相互作用,这作用力会使微悬臂摆动, 再利用激光将光照射在悬臂的末端,当摆动形成时,会使反射光的位置改变而造成偏移量,此时激光检测 器会记录此偏移量,也会把此时的信号给反馈系统,以利于系统做适当的调整,最后再将样品的表面特性 以影像的方式给呈现出来。 二、工作原理: 将一个对微弱力极敏感的微悬臂一端固定,另一端有一微小的针尖,针尖与样品表面轻轻接触,由于 针尖尖端原子与样品表面原子间存在极微弱的排斥力,通过在扫描时控制这种力的恒定,带有针尖的微悬 臂将对应于针尖与样品表面原子间作用力的等位面而在垂直于样品的表面方向起伏运动。利用光学检测法
原子力显微镜
原子力显微镜 一、实验目的 1了解原子力显微镜的工作原理 2掌握用原子力显微镜进行表面观测的方法 二、实验原理 1. AFM基本原理 原子力显微镜的工作原理就是将探针装在一弹性微悬臂的一端,微悬臂的另一端固定,当探针在样品表面扫描时,探针与样品表面原子间的排斥力会使得微悬臂轻微变形,这样,微悬臂的轻微变形就可以作为探针和样品间排斥力的直接量度。一束激光经微悬臂的背面反射到光电检测器,可以精确测量微悬臂的微小变形,这样就实现了通过检测样品与探针之间的原子排斥力来反映样品表面形貌和其他表面结构。 在原子力显微镜的系统中,可分成三个部分:力检测部分、位置检测部分、反馈系统。如图一显示。 1)力检测部分 在原子力显微镜系统中,所要检测的力是原子与原子之间的范德华力。使用微悬臂来检测原子之间力的变化量。如图2所示,微悬臂通常由一个一般100~500μm长和大约500nm~5μm厚的硅片或氮化硅片制成。微悬臂顶端有一个尖锐针尖,用来检测样品-针尖间的相互作用力。 (2)位置检测部分 在原子力显微镜系统中,当针尖与样品之间有了作用之后,会使得悬臂摆动,所以当激光照射在微悬臂的末端时,其反射光的位置也会因为悬臂摆动而有所改变,这就造成偏移量的产生。在整个系统中是依靠激光光斑位置检测器将偏移量记录下并转换成电的信号,以供SPM控制器作信号处理。聚焦到微悬臂上面的激光反射到激光位置检测器,通过对落在检测器四个象限的光强进行计算,可以得到由于表面形貌引起的微悬臂形变量大小,从而得到样品表面的不同信息。 (3)反馈系统 在原子力显微镜系统中,将信号经由激光检测器取入之后,在反馈系统中会将此信号当作反馈信号,作为内部的调整信号,并驱使通常由压电陶瓷制作的扫描器做适当的移动,以保持样品与针尖保持一定的作用力。 2.AFM 有三种不同的工作模式: 接触模式( contact mode) 、非接触模式(noncontact mode) 和共振模式或轻敲模式(Tapping Mode) 。(1)接触模式: 从概念上来理解,接触模式是AFM最直接的成像模式。AFM 在整个扫描成像过程之中,探针针尖始终与样品表面保持亲密的接触,而相互
原子力显微镜的工作原理及基本操作
2015年秋季学期研究生课程考核 (读书报告、研究报告) 考核科目:原子力显微镜的工作原理及基本操作学生所在院(系): 学生所在学科: 学生姓名: 学号: 学生类别:应用型 考核结果阅卷人
原子力显微镜的工作原理及基本操作 一、实验目的 1.了解原子力显微镜的工作原理 2.掌握用原子力显微镜进行表面观测的方法 二、原子力显微镜结构及工作原理 2.1 AFM的工作原理 AFM是用一个一端装有探针而另一端固定的弹性微悬臂来检测样品表面信息的,当探针扫描样品时,与样品和探针距离有关的相互作用力作用在针尖上,使微悬臂发生形变。AFM系统就是通过检测这个形变量,从而获得样品表面形貌及其他表面相关信息 1.原子力作用机制 当两个物体的距离小到一定程度的时候,它们之间将会有原子力作用.这个力主要与针尖和样品之间的距离有关.从对微悬臂形变的作用效果来分,可简单将其分为吸引力和排斥力,它们分别在不同的工作模式下、不同的作用距离起主导作用.探针与样品的距离不同,作用力的大小也不相同,针尖/样品距离曲线如图1所示. 图1 针尖/样品距离曲线 2.原子力显微镜的成像原理 AFM的微悬臂绵薄而修长,当对样品表面进行扫描时,针尖与样品之间力的作用会使微悬臂发生弹性形变,针尖碰到样品表面时,很容易弹起和起伏,它非常的灵敏,极小的力的作用也能反应出来.也就是说如果检测出这种形变,就可以知道针尖-样品间的相互作用力,从而得知样品的形貌。
图2 光束偏转法的原理图 微悬臂形变的检测方法一般有电容、隧道电流、外差、自差、激光二极管反馈、偏振、偏转方法。偏转方法是采用最多的方法,也是原子力显微镜批量生产所采用的方法.图2就是光束偏转法的原理图。 3.原子力显微镜的工作模式 AFM主要有三种工作模式:接触模式(ContactMode)、非接触模式(Non-contact Mode)和轻敲模式( Tapping Mode),如图3. 图3 三种工作模式 接触模式中,针尖一直和样品接触并在其表面上简单地移动.针尖与样品间的相互作用力是两者相接触原子间的排斥力,其大小约为10-8~10-11N。 非接触模式是控制探针一直不与样品表面接触,让探针始终在样品上方5~20nm 距离内扫描.因为探针与样品始终不接触,故而避免了接触模式中遇到的破坏样品和污染针尖的问题,灵敏度也比接触式高,但分辨率相对接触式较低,且非接触模式不适合在液体中成像。 轻敲模式是介于接触模式和非接触模式之间新发展起来的成像技术,类似与非接触模式,但微悬臂的共振频率的振幅相对非接触模式较大,一般在0.01~1nm.分辨率几乎和接触模式一样好,同时对样品的破坏也几乎完全消失,克服了以往常规模式的局限。 4.原子力显微镜的构成 SPA-300HV型显微镜主要包括以下四个系统: 减震系统、头部系统、电子学控制系统、计算机软件系统(图4为结构图)。
(AFM)原子力显微镜原理介绍
原子力显微镜(AFM)原理 一、原理 原子力显微镜(Atomic Force Microscopy, AFM)是由IBM公司的Binnig与史丹佛大学的Quate于一九八五年所发明的,其目的是为了使非导体也可以采用扫描探针显微镜(SPM)进行观测。 图1、原子与原子之间的交互作用力因为彼此之间的距离 的不同而有所不同,其之间的能量表示也会不同。 原子力显微镜(AFM)与扫描隧道显微镜(STM)最大的差别在于并非利用电子隧道效应,而是利用原子之间的范德华力(Van Der Waals Force)作用来呈现样品的表面特性。假设两个原子中,一个是在悬臂(cantilever)的探针尖端,另一个是在样本的表面,它们之间的作用力会随距离的改变而变化,其作用力与距离的关系如“图1”所示,当原子与原子很接近时,彼此电子云斥力的作用大于原子核与电子云之间的吸引力作用,所以整个合力表现为斥力的作用,反之若两原子分开有一定距离时,其电子云斥力的作
用小于彼此原子核与电子云之间的吸引力作用,故整个合力表现为引力的作用。若以能量的角度来看,这种原子与原子之间的距离与彼此之间能量的大小也可从Lennard –Jones的公式中到另一种印证。 为原子的直径为原子之间的距离 从公式中知道,当r降低到某一程度时其能量为+E,也代表了在空间中两个原子是相当接近且能量为正值,若假设r增加到某一程度时,其能量就会为-E同时也说明了空间中两个原子之间距离相当远的且能量为负值。不管从空间上去看两个原子之间的距离与其所导致的吸引力和斥力或是从当中能量的关系来看,原子力显微镜就是利用原子之间那奇妙的关系来把原子样子给呈现出来,让微观的世界不再神秘。 在原子力显微镜的系统中,是利用微小探针与待测物之间交互作用力,来呈现待测物的表面之物理特性。所以在原子力显微镜中也利用斥力与吸引力的方式发展出两种操作模式: (1)利用原子斥力的变化而产生表面轮廓为接触式原子力显微镜(contact AFM),探针与试片的距离约数个?。 (2)利用原子吸引力的变化而产生表面轮廓为非接触式原子力显微镜(non-contact AFM),探针与试片的距离约数十到数百?。 二、原子力显微镜的硬件架构: 在原子力显微镜(Atomic Force Microscopy,AFM)的系统中,可分成三个部分:力检测部分、位置检测部分、反馈系统。
原子力显微镜工作原理、步骤、注意事项
原子力显微镜 工作原理: 在原子力显微镜的系统中,可分成三个部分:力检测部分、位置检测部分、反馈系统。主要工作原理如下图: 在AFM中用一个安装在对微弱力极敏感的微悬臂上的极细探针。当探针与样品接触时,由于它们原子之间存在极微弱的作用力(吸引或排斥力) ,引起微悬臂偏转。扫描时控制这种作用力恒定,带针尖的微悬臂将对应于原子间作用力的等位面,在垂直于样品表面方向上起伏运动, 因而会使反射光的位置改变而造成偏移量,通过光电检测系统(通常利用光学、电容或隧道电流方法) 对微悬臂的偏转进行扫描,测得微悬臂对应于扫描各点的位置变化, 此时激光检测器会记录此偏移量,也会把此时的信号给反馈系统,以利于系统做适当的调整。将信号放大与转换从而得到样品表面原子级的三维立体形貌图像。 AFM 的核心部件是力的传感器件, 包括微悬臂(Cantilever) 和固定于其一端的针尖。根据物理学原理,施加到Cantilever 末端力的表达式为: F = KΔZ。 ΔZ 表示针尖相对于试样间的距离, K 为Can2tilever 的弹性系数,力的变化均可以通过Cantilever 被检测。 (1) AFM关键部位: AFM关键部份是力敏感元件和力敏感检测装置。所以微悬臂和针尖是决定AFM灵
敏度的核心。为了能够准确地反映出样品表面与针尖之间微弱的相互作用力的变化,得到更真实的样品表面形貌,提高AFM 的灵敏度,微悬臂的设计通常要求满足下述条件: ①较低的力学弹性系数,使很小的力就可以产生可观测的位移; ②较高的力学共振频率; ③高的横向刚性,针尖与样品表面的摩擦不会使它发生弯曲; ④微悬臂长度尽可能短;⑤微悬臂带有能够通过光学、电容或隧道电流方法检测其动态位移的镜子或电极; ⑥针尖尽可能尖锐。 (3) AFM的针尖技术 探针是AFM的核心部件。如右图。目前, 一般的探针式表面形貌测量仪垂直分辨率已 达到0.1 nm ,因此足以检测出物质表面的微 观形貌。但是,探针针尖曲率半径的大小将 直接影响到测量的水平分辨率。当样品的尺 寸大小与探针针尖的曲率半径相当或更小时, 会出现“扩宽效应”,即实际观测到的样品宽 度偏大。这种误差来源于针尖边壁同样品的 相互作用以及微悬臂受力变形。某些AFM 图像的失真在于针尖受到污染。一般的机械触针为金刚石材料,其最小曲率半径约20 nm。普通的AFM 探针材料是硅、氧化硅或氮化硅(Si3N4 ) ,其最小曲率半径可达10 nm。由于可能存在“扩宽效应”,针尖技术的发展在AFM中非常重要。其一是发展制得更尖锐的探针,如用电子沉积法制得的探针,其针尖曲率半径在5~10 nm 之间。其二是对探针进行修饰,从而发展起针尖修饰技术。 探针针尖的几何物理特性制约着针尖的敏感性及样品图像的空间分辨率。因此针尖技术的发展有赖于对针尖进行能动的、功能化的分子水平的设计。只有设计出更尖锐、更功能化的探针, 改善AFM 的力调制成像(force modulation imaging) 技术和相位成像(phase imaging)技术的成像环境,同时改进被测样品的制备方法,才能真正地提高样品表面形貌图像的质量。 (4) AFM的工作模式 AFM 有三种不同的工作模式: 接触模式( contact mode) 、非接触模式(noncontact mode) 和共振模式或轻敲模式(Tapping Mode) 。 ①接触模式 接触模式包括恒力模式(constant2force mode) 和恒高模式(constant2height mode) 。在恒力模式中过反馈线圈调节微悬臂的偏转程度不变,从而保证样品与针尖之间的作用力恒定,当沿x 、y 方向扫描时,记录Z 方向上扫描器的移动情况来得到样品的表面轮廓形貌图像。这种模式由于可以通过改变样品的上下高度来调节针尖与样品表面之间的距离,这样样品的高度值较准确,适用于物质的表面分析。在恒高模式中,保持样品与针尖的相对高度不变,直接测量出微悬臂的偏转情况,即扫描器在z 方向上的移动情况来获得图像。这种模式对样品高度的变化较为敏感,可实现样品的快速扫描,适用于分子、原子的图像的观察。接触模式的特点是探针与样品表面紧密接触并在表面上滑动。针尖与样品之间的相互作用力是两者相接触原子
原子力显微镜基本原理
原子力显微镜 一、概述 原子力显微镜(Atomic Force Microscopy, AFM)是由IBM 公司的Binnig与史丹佛大学的Quate 于一九八五年所发明的,其目的是为了使非导体也可以采用扫描探针显微镜(SPM)进行观测。 原子力显微镜与扫描隧道显微镜的区别在于: 二、基本原理 原子力显微镜(AFM )的原理是利用针尖与样品表面原子间的微弱作用力来作为反馈信号,维持针尖——样品间作用力恒定,同时针尖在样品表面扫描,从而得知样品表面的高低起伏。
三、硬件架构 在原子力显微镜(Atomic Force Microscopy,AFM)的系统中,可分成三个部分:力检测部分、位置检测部分、反馈系统。 1、力检测部分 在原子力显微镜(AFM)的系统中,所要检测的力是原子与原子之的范德华力。所以在本系统中是使用微小悬臂(cantilever)来检测原子之间力的变化量。这微小悬臂有一定的规格,例如:长度、宽度、弹性系数以及针尖的形状,而这些规格的选择是依照样品的特性,以及操作模式的不同,而选择不同类型的探针。 2、位置检测部分 在原子力显微镜(AFM)的系统中,当针尖与样品之间有了交互作用之后,会使得悬臂cantilever摆动,所以当激光照射在cantilever的末端时,其反射光的位置也会因
为cantilever摆动而有所改变,这就造成偏移量的产生。在整个系统中是依靠激光光斑位置检测器将偏移量记录下并转换成电的信号,以供SPM控制器作信号处理。 3、反馈系统 在原子力显微镜(AFM)的系统中,将信号经由激光检测器取入之后,在反馈系统中会将此信号当作反馈信号,作为内部的调整信号,并驱使通常由压电陶瓷管制作的扫描器做适当的移动,以保持样品与针尖保持合适的作用力。 四、原子力显微镜的3种操作模式 五、举例说明原子力显微镜工作原理 如上图所示,二极管激光器(Laser Diode)发出的激光束经过光学系统聚焦在微悬臂(Cantilever)背面,并从微悬臂背面反射到由光电二极管构成的光斑位置检测器(Detector)。在样品扫描时,由于样品表面的原子与微悬臂探针尖端的原子间的相互作用力,微悬臂将随样品表面形貌而弯曲起伏,反射光束也将随之偏移,因而,通过光电二极管检测光斑位置的变化,就能获得被测样品表面形貌的信息。在系统检测成像全过程中,探
原子力显微镜的原理及应用
原子力显微镜的原理及应用 北京大学生物医学工程05硕 喻敏 一、引言 1985年Binnig与斯坦福大学的C. F. Quate和IBM苏黎士实验室的Christoph Gerber合作推出了原子力显微镜(Atomic Force Microscopy ,简称AFM) ,[1]这是一种不需要导电试样的扫描探针型显微镜。 这种显微镜通过其粗细只有一个原子大小的探针在非常近的距离上探索物体表面的情况,便可以分辨出其他显微镜无法分辨的极小尺度上的表面细节与特征。由于它的出现,直接观测微观世界的大门被打开了。这种显微镜能以空前的高分辨率探测原子和分子的形状,确定物体的电、磁与机械特性,甚至能确定温度变化的情况。 使用这种显微镜时无需使试样发生变化,也无需使试样受破坏性的高能辐射作用。 1 AFM基本原理 总合起来讲,原子力显微镜的工作原理就是将探针装在一弹性微悬臂的一端,微悬臂的另一端固定,当探针在样品表面扫描时,探针与样品表面原子间的排斥力会使得微悬臂轻微变形,这样,微悬臂的轻微变形就可以作为探针和样品间排斥力的直接量度。一束激光经微悬臂的背面反射到光电检测器,可以精确测量微悬臂的微小变形,这样就实现了通过检测样品与探针之间的原子排斥力来反映样品表面形貌和其他表面结构。 在原子力显微镜(Atomic Force Microscopy,AFM)的系统中,可分成三个部分:力检测部分、位置检测部分、反馈系统 (见图1)。 1.1 力检测部分 在原子力显微镜(AFM)的系统中,所要检测的力是原子与原子之间的范德华力。所以在本系统中是使用微小悬臂(cantilever)来检测原子之间力的变化量。微悬臂通常由一个一般100~500μm长和大约500nm~5μm厚的硅片或氮化硅片制成。微悬臂顶端有一个尖锐针尖,用来检测样品-针尖间的相互作用力。这微小悬臂有一定的规格,例如:长度、宽度、弹性系数以及针尖的形状,而这些规格的选择是依照样品的特性,以及操作模式的不同,而选择不同类型的探针。以下是一种典型的AFM悬臂和针尖:
原子力显微镜
原子力显微镜 摘要:光学显微镜、电子显微镜、扫描隧道显微镜,每一次重要显微技术的发展,都为科学和社会的进步作出了巨大的贡献。而原子力显微镜的出现,则使得对非导电材料表面结构的测量达到了一个新的精度。本文简要地阐述了原子力显微镜的原理,并使用原子力显微镜对四种不同材料的表面结构进行了测量。 关键词:原子力显微镜;表面粗糙度 1. 引言 在当今的科学技术中,如何观察、测量、分析尺寸小于可见光波长的物体,是一个重要的研究方向。扫描隧道显微镜(STM) 使人们首次能够真正实时地观察到单个原子在物体表面的排列方式和与表面电子行为有关的物理、化学性质。但STM要求样品表面能够导电,从而使得STM只能直接观察导体和半导体的表面结构。为了克服STM 的不足之处,推出了原子力显微镜(AFM)。AFM是通过探针与被测样品之间微弱的相互作用力(原子力) 来获得物质表面形貌的信息。因此,AFM除导电样品外,还能够观测非导电样品的表面结构,且不需要用导电薄膜覆盖。对比于现有的其它显微工具,原子力显微镜以其高分辨、制样简单、操作易行等特点而备受关注,并已在生命科学、材料科学等领域发挥了重大作用,极大地推动了纳米科技的发展,促使人类进入了纳米时代。 2. 实验目的 1)了解原子力显微镜的工作原理。 2)初步掌握用原子力显微镜进行表面观测的方法。 3.实验原理 1)AFM的工作原理和工作模式 (1)AFM的工作原理 在AFM中用一个安装在对微弱力极敏感的微悬臂上的极细探针。当探针与样品接触时,由于它们原子之间存在极微弱的作用力(吸引或排斥力) ,引起微悬臂偏转。扫描时控制这种作用力恒定,带针尖的微悬臂将对应于原子间作用力的等位面,在垂直于样品表面方向上起伏运动, 因而会使反射光的位置改变而造成偏移量,通过光电检测系统(通常利用光学、电容或隧道电流方法) 对微悬臂的偏转进行扫描,测得微悬臂对应于扫描各点的位置变化, 此时激光检测器会记录此偏移量,也会把此时的信号给反馈系统,以利于系统做适当的调整。将信号放大与转换从而得到样品表面原子级的三维立体形貌图像。AFM 的核心部件是力的传感器