FANUC R-30iA mate柜的外围IO接线
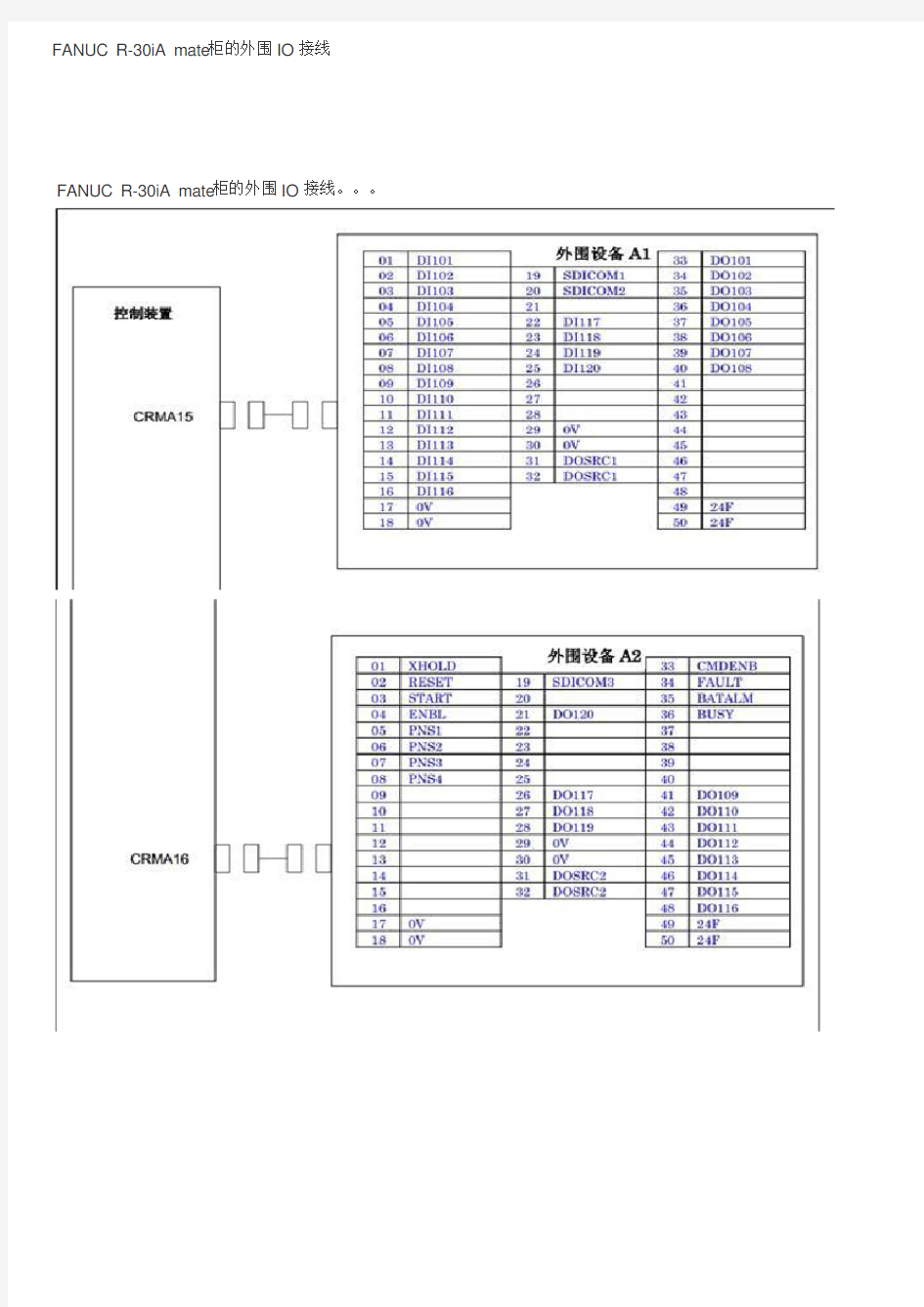
FANUC R-30iA mate柜的外围IO接线FANUC R-30iA mate柜的外围IO接线。。。
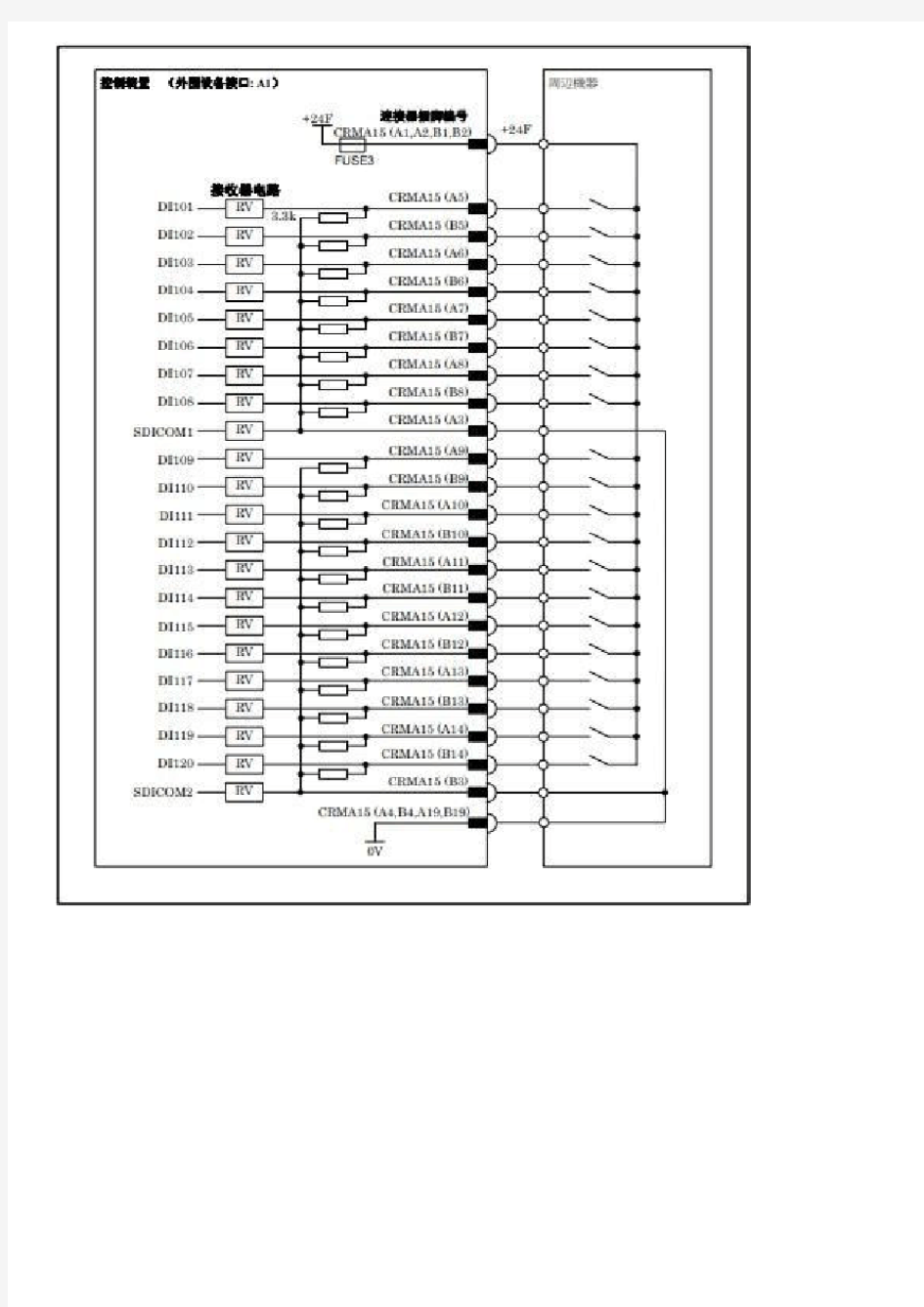
伍工,请进来讨论一下。。。FANUC的IO版怎么改才能把原来的输入输出都是+24F 改成0V。。。据说要改主板跳线。。。你是怎么看的。。。你有没有这么做过了???
现在是用三菱FX系列的PLC。。。都知道三菱PLC输入输出都是0V的。。。要想更好的跟三菱PLC的IO连接。。。怎么样该可以把机器人的IO板子改成是输入输出都是0V有效的???
推荐链接猜你喜欢:
?西门子工控机大促,仅需4780元起!
?大型工控仿真、组态与监控VC++ 100%源码组件库!
?施耐德睿易产品平台隆重上线
?福禄克明星产品免费试用申请开始啦
?看英特尔嵌入式案例,赢数码相框等好礼!
?美国高端传感器EMX首次登录中国相关产品资料免费索取?加盟假日工程师计划,拥有第二份工作?供应FANUC数控系统配件(法通数控)
?FANUC维修SIEMENS维修
?GE FANUC 同意收购Radstone PLC公司
?请问iFIX 5.8版有支援Fanuc ROBOT 控制器(R30iB MEAT)?
?专业维修伺服驱动器(INDRAMAT、SIEMENS、BOSCH、FANUC)?诚邀参加GE Fanuc
?Fanuc 0ME
?GE Fanuc嵌入式系统发布了4Gb/s光纤通道主总线适配器AdvancedMC?模块
友荐[?]
个人主页给发消息加
三菱PLC输入输出都是0V的
什么意思啊
个人主页给发消息加
伍工,请进来讨论一下。。。FANUC的IO版怎么改才能把原来的输入输出都是+24F改成0V。。。据说要改主板跳线。。。你是怎么看的。。。你有没有这么做过了???
个人主页给发消息加
那得先拆开看看输入输出电路的形式,根据原理再定是选择跳线还是增加外加电路。
个人主页给发消息加
有部分传感器可以考虑用PNP的,还是不能一劳永逸根本解决问题!
个人主页给发消息加
PLC侧可以用继电器转
个人主页给发消息加
主板有一个拨动开关,拨一下就转换了电平:不过,输入的最前面4个信号是无法转换的
个人主页给发消息加
再给你几个图片
个人主页给发消息加
这些的详细资料,你直接在那本硬件维修资料即可找到
个人主页给发消息加R30-iA跟iB版有差別嗎?
上面那些圖片資料不曉得用在iB可不可行!!
手轮接线方法1
手持手脉电子手轮与佳门JNC-40M控制卡接线方法 手里有一个DC-5V-100PPR A B信号的手轮如下图 要用这个手轮接在佳门JNC-40M控制卡上我们需知道手轮的每一根线对应的功能如下图。他是按照颜色区分的。我们可以查看说明书或者从网上搜索对应型号的电子版说明书来获取如下接线要求。(有些手轮淘宝卖家也会把如下接线要求贴在宝贝详情里面供买家参考)
另外需要知道控制卡控制卡与手轮连接接线情况 JNC-40M控制卡边上有一个16P接口端子是用来接手轮的如下图 JNC-40M控制卡与手轮连接接线要求如下 接线时我们用到下面第一张图片这个一头压好的FC-16P压线头。我们会发现第一张图片压线头中间有一个凸起的部分,而第二张图片控制卡的手轮接口有个缺口的部分,这种巧妙的设计使其只有一种连接方法,有效的解决了误连接导致的器材损坏和意外的发生。 我们又会发现压线头的一面有一个三角形的图案。如下图。在压线的时候我们遵循一个原则:红色的线必须放在有三角形的图案那边。保证接线时不会出错。
把压线头插到JNC-40M控制卡手轮接口上(如图11)我们又会发现红色的线(第一根线) 正好与手轮接口端子的1号脚(手轮脉冲A)连接 (根据控制卡与手轮连接的接线要求得知红色的线(第一根线)对应的是手轮脉冲A )从左至右如图11 那么第二根线对应2号脚(手轮脉冲B), 第三根线对应3号脚(+5V输出) 第四根线对应4号脚(GND) 以此类推。。。。(要根据控制卡与手轮连接的接线要求对应其功能否则会出错) 这样我们结合手轮和控制卡手轮接口的接线要求就可以清楚的明白 红线(第一根线)(手轮脉冲A)接黄色的线 第二根线对应2号脚(手轮脉冲B)接白色的线 第三根线对应3号脚(+5V输出) 接红色的线 第四根线对应4号脚(GND) 接黑色的线 以此类推。。。。这样我们就能快速的进行接线 我们把线剥开并剪掉一些不需要的线,套上热缩管,然后一一连接
PCB端子说明
PCB印刷线路板接线端子说明 接线端子分类 接线端子可以分为:欧式接线端子系列、 插拔式接线端子系列、栅栏式接线端子系列、弹簧式接线端子系列、轨道式接线端子系列、穿墙式接线端子系列、日式组合型接线端子,欧式框压型组合接线端子、弹簧型端子及线路板PCB端子.线路板接插件等各种类型.生产大电流重载插座.数控机床电子手轮等等 1:大电流接线端子属于接线端子的一种;只是能承受的电流比一般的接线端子要强,接入导线截面积大。 大电流接线端子主要分为:弹簧式接线端子、栅栏式接线端子、插拔式接线端子、轨道式接线端子、穿墙式接线端子等等 2:穿墙式接线端子:采用螺钉连接线技术,绝缘材料为PA66(阻燃等级:连接器 采用优质的高导电金属材料。 穿墙式接线端子可并排安装在为1mm到10mm等厚度的面板上,可自动补偿调整面板厚度的距离,组成任意极数的端子排,而且可以使用隔离板来增加空气间隙和爬电距离。不需要任何工具便可将穿墙式接线端子牢固的安装在面板上矩形预留孔里,安装极其方便 穿墙式接线端子特点 无论为哪一种接线方式,均具有以下特点: 各接线位呈直线形排列。 标识清晰易读,各个接线位的对应关系明了易辨。 柔性导线可以带或不带管状端头连接;螺钉接线端子,允许在一个接线位上连接两根导线。 可以根据需要,优化选择插拔方向、螺丝刀操作方向及接线方向。 连接可靠方便,接线安全性高,抗腐蚀性极强。 绝缘外壳牢固耐用,阻燃等级高,防手指触摸。 3:试验式接线端子:是起开关作用的滑动金属件能通过端子压线框能承受最大的工作电流,切换时用螺丝刀松开螺丝,移动滑块就行,开关位置就一目了然;其两端设有测试插座,配用相应的测试端头就可以进行连接测试,测量电流时可不中断操作。可接电压为660V电流为57A的控制回路. 4:固定式接线端子:包括有座体,座体上设有等距平行隔片,二个隔片之间形成绝缘座,所述绝缘座内安装有导电金属片,所述金属片的一端连接有紧固外部引线的螺钉,所述金属片的另一端设有与内部引线端配合的插片。在插片上方的接口单元上设有装饰面板。所述接口单元为上下二排。本实用新型采用一体化结构,使用方便,操作简单;内引线端设有装饰面板,避免了电线外露,安全可靠;安全性高、可靠性强。 PCB印刷线路板接线端子 一:螺钉连接方式的印刷线路板接线端子在电子工业中一直占有重要的一席,现在已成为印刷线路板的一个重要的组成部件。其结构化的设计更兼顾了接线方便和牢靠的螺钉连接等方面的特点。 二:弹簧连接方式的印刷线路板接线端子分回拉式弹簧连接和蝶形弹簧连接两种。其中
0i mate-TDMD硬件连接图
说明: 代表可由FANUC 提供完整线缆或仅提供插头由MTB 自行制作线缆 代表必须由FANUC 提供完整线缆代表需由MTB 自己制作的线缆 注: 1.根据线标K*可由后面章节查看该端口的管脚连接图 2.电池是在使用绝对式编码器时使用(非标准配置),如使用增量式编码器时可不接电池 3.电机与放大器的最大电流必须匹配 综合接线图(i
说明: 代表可由FANUC 提供完整线缆或仅提供插头由MTB 自行制作线缆 代表必须由FANUC 提供完整线缆代表需由MTB 自己制作的线缆 注: 1.根据线标K*可由后面章节查看该端口的管脚连接图 2.电池是在使用绝对式编码器时使用(非标准配置),如使用增量式编码器时可不接电池 3.电机与放大器的最大电流必须匹配
说明: 代表可由FANUC 提供完整线缆或仅提供插头由MTB 自行制作线缆 代表必须由FANUC 提供完整线缆代表需由MTB 自己制作的线缆 注: 1.根据线标K*可由后面章节查看该端口的管脚连接图 2.电池是在使用绝对式编码器时使用(非标准配置),如使用增量式编码器时可不接电池 3.电机与放大器的最大电流必须匹配
说明: 代表可由FANUC 提供完整线缆或仅提供插头由MTB 自行制作线缆代表必须由FANUC 提供完整线缆代表需由MTB 自己制作的线缆 注:1.根据线标K*可由后面章节查看该端口的管脚连接图 2.电池是在使用绝对式编码器时使用(非标准配置),如使用增量式编码器时可不接电池 3.电机与放大器的最大电流必须匹配 DC24V
20针插头管脚布局说明 8 10 9 6 1 5 2 3 4 20191817161514131211
电子手轮维修方法.doc
电子手轮维修 电子手轮维修 (1) 电子手轮概述 (1) 电子手轮特点 (1) 电子手轮规格 (1) 生产电子手轮主要品牌及特点 (2) 电子手轮在数控机床中的用途: (4) 电子手轮主要作用原理 (5) 电子手轮的用途 (6) 电子手轮电路图 (7) 航空插头图 (8) 电子手轮概述 电子手轮(既手摇脉冲发生器) 即手摇脉冲发生器(Manual Pulse Generator,也称为手轮,手脉,手动脉波发生器等),用于教导式CNC 机械工作原点设定、步进微调与中断插入等动作,另外在印刷机械上也广泛的使用电子手轮. 电子手轮特点 1、超薄型,重量轻,手感极佳。 2、驱动器输出,抗干扰能力强,可长距离传输。 适用范围:用于数控机床、印刷机械等的零位补正和信号分割。 电子手轮规格 电气特性 ELECTRICAL spec.
输出波形Output Wave 方波Square Wave 供应电源Power Supply DC5-30V DC5V 响应频率MAX.Response 0KHZ-100KHZ 消耗电流Current consumption ≤60mA 机械特性Mechanical spec. 主体材质The main material 铝合金Aluminum 外壳材质Shell material 铝合金Aluminum 轴径the axis diameter 42mm. 其他尺寸可定制 轴负载Shaft loading 轴向Axial:20N 径向Radial:30N 起动转矩Starting torque ≤70克.厘米(+25℃) 最高转速MAX.SPEED 4000rpm 震动Vibration ≤100m/s(5~2000HZ) 冲击Shock ≤1000m/s(11ms) 重量weight ≤0.3kg 环境特性Environmental spec 工作温度 operating Temp -10℃-70℃(不结冰) 工作湿度 operating Humidity 30~85%RH(无结露) 储存温度 storage Temp -30℃-80℃ 防护等级protection grade IP50 生产电子手轮主要品牌及特点 三门湾HPG-003-A4: 1.采用德国技术生产的优质编码器,金属码盘,刻度准确、精度高、质感佳、手感好 2.直流 5V 或 12V 或24V电源系统可选 3.提供 25PPR 或 100PPR 脉波数输出 4.多种输出接口型式 : 电压(单端)、差动、开集电极输出(Open Collector)、以及光耦输出等多种输 出可供选择, 配合各种应用 . 5.支持多轴使用(最多 11 轴) 6.附电源指示灯(LED,DC12V~24V)
桥 路 变 换 接 线 实 验
实验五常见力学仪器操作及数据分析专项能力训练 ——扭组合变形薄壁筒应力测量实验一、实验目的 1.用电测法测定平面应力状态下主应力的大小及方向,并与理论值进行比较; 2.测定弯扭组合变形杆件中分别由弯矩、剪力和转矩所引起的应力,并确定内力分量弯矩、剪力和转矩的实验值。 二、实验仪器和设备 1.多功能组合实验装置一台; 2.弯扭组合变形实验梁一根; 3.TS3860型数字应变仪一台。 三、实验原理和方法 弯扭组合薄臂圆筒实验梁是由薄壁圆筒、扇臂、手轮、旋转支座等组成。实验时,转动手轮,加载螺杆和载荷传感器都向下移动,载荷传感器就有压力电信号输出,此时电子秤数字显示出作用在扇臂端的载荷值。扇臂端的作用力传递到薄壁圆筒上,使圆筒产生弯扭组合变形。 薄壁圆筒材料为铝,其弹性模量E=210GPa,泊松比μ=0.29。圆筒外径D o=37mm,壁厚t=1.8mm。 薄壁圆筒弯扭组合变形受力简图如图5-1所示。截面I—I为被测位置,由材料力学可知,该截面上的内力有弯矩、剪力和l转矩。取其前、后、上、下的A、C、B、D为四个被测点,其应力状态如图5-2所示。每点处按-45°、0°、+45°方向粘贴一个三轴45?应变花(见图5-3(a)。 实验内容和方法如下: 图5-1薄壁圆筒受力图图5-2 A、B、C、D点应力状态1.确定主应力大小及方向 弯扭组合变形薄壁圆筒表面上的点处于平面应力状态,先用应变花测出三个方向的线应变,随后算出主应变的大小和方向,再运用广义胡克定律公式即可求出主应力的大小和方向。 由于薄壁圆筒上的点处于平面应力状态且材料为钢,与应变片灵敏系数的标定条件不符,故应进行横向效应的修正。此时只要将主应力公式中的弹性模量E、泊松比μ用表观弹性模量E a、表观泊松比μa代替即可得到修正的主应力公式。E a、μa的表达式按式(5-1)、式(5-2)分别为
MACH3电子手轮说明书
MODS FOR MACH3 电子手轮说明书 本MACH3专用高级电子手轮,它能实时显示MACH3运行的坐标参数与显示常用的状态.能实时显示手轮每次转动的步数. 其手轮用240*320TFT高清LCD显示屏,系统核心才用ARM STM32单片机,其单片机具有高稳定,速度快等特点.与MACH3的数据传输才用串口MODBUS协议.即使用本电子手 轮,其电脑一定要有一个串口.还有一个USB口,USB口是来做取电用的,不占系统资源.
安装与调试: 1:先将手轮的串口母口与电脑的串口公口连接,并固定好螺丝紧上,再把USB插头与电脑USB连接,并打开MACH3(V3.041). 2:按(设置) (端口/针脚) 如下图中所示:
先按上图所示设定,在编码器/电子手轮说明有详述. V1.84版本请重新启动MACH3. 3:设置ModBus控制:
超时时间在超时的时间设置说明有详述 4:将脚本文件Macropump.m1s复制到C:\Mach3\macros\Mach3Mill文件夹里, 如果MACH3装在其它盘,请拷在所在的文件夹下的\Mach3\macros\Mach3Mill文件夹里. 5:总体设置:
6: 重新启动MACH3,后按键盘上的TAB键呼出手轮图:
这时转动手轮上的功能键,MACH3上的手轮图指示会相应改变. 编码器/电子手轮说明: Counts/Unit是指手轮每转动N格才算一步,比如写上2,档位在0.1时,这时要转两格才进0.1. Velocity是全速时的速度,输入数字大,手摇控制的轴速度小,反之越大. 超时的时间设置说明:
手动脉冲发生器接线说明
手动脉冲发生器接线说明 电气特性: Item Model HT-941 发那科/发格 HT-943 三菱 HT-942 西门子/发格 脉波输出 100PPR 25PPR 100PPR 供电范围 DC5~15V ±5% DC5V ±5% 电流(空载) ≤60mA ≤160mA 电压输出 高 ≥VccX0.7V ━━ ≥2.5V 低 ≤0.5V ━━ ≤0.5V 电流输出 ≤35mA ±20mA Fall/Rise Time 5us(Typ) <100ns 频率响应 0~5Khz 隔离电阻 ≥20M Ω 电源指示 DC24V LED 安装尺寸 165(含挂柄)X74X29mm 工作/存储温 —10~+60C/—20~+70C HT 系列电子手轮可适用于多种CNC 数控系统,如发那科(FANUC )、西门子、三菱、发格、海德汉、意大利SELCA 、宝元、新代、海纳克(HANUC)、广州数控(GSK)、开通数控、凯恩帝(KND)等知名数控系列。 客户可根据输出电压值(DC5~15V )和输出脉冲(25PPR 或100PPR)选型,急停和启动按钮可选,最多可实现11轴控制。 接线图: 序号 线色 信号 项目 1 红 +5V/12V 编码器 2 黑 0V 3 黄 A 4 白 B 5 粉红 A 非 西门子用 6 深绿 B 非 西门子用 7 透明 24V 指示灯LED 8 浅紫 0V 9 灰 OFF 轴选择 10 棕 X 11 橙 Y 12 浅蓝 Z
13 深蓝 4 14 浅绿/黑X1 倍率 15 浅蓝/黑X10 倍率 16 透明/黑X100 17 紫COM COM 18 红/黑备用 19 白/黑 请按照接线图对应线色接线,接线前请仔细阅读后面的注意事项。A非和B 非为西门子及类似系统专用,如果系统无这两项,此两根线不用接。 注意: 1,编码器使用电压为DC5~15V(三菱/发格系统为DC12V,发那科/西门子系统为5V)接错电压或接错线路将导致编码器烧毁。 2,为接的线必须剪去裸铜,再单个包好,不可触碰其他线路、元件和外壳,以免短路。 此说明为北京京佳璐科技有限公司所有,有需求请登录公司网站查询, 网址是:https://www.360docs.net/doc/a86215170.html,
两相步进电机4、5、6、8线接线方式
随着微电子和计算机技术的发展,步进电机的需求量与日俱增,在各个国民经济领域都有应用。虽然步进电机已被广泛地应用,但步进电机并不能像普通的直流电机,交流电机在常规下使用。它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。两相步进电机是现在最常用的步进电机,两相步进电机有4线的,5线的,6线的,8线的。 4线步进电机为现在最常用的,也是最简单的,直接A+A-B+B-对应接好就可以了。 5线步进电机可能比较少,现在只有一些日本的老机器上会有这类电机,5线怎么接?其实5线步进电机接线只是把6线步进电机的COM端并一起,用的时候把COM端分别并到Acom和Bcom上便可。5线的步进电机接4线的驱动和接6线步进电机一样。 6线步进电机是早先的步进电机,因为最早步进电机驱动芯片换相需要COM端,后面随着双极驱动芯片的更新4线芯片可以换相了,现在4线的驱动相比用的较多,不过在高速场合6线的驱动还是有优势的。
6线的步进电机接6线的驱动,便是A+、Acom、A-、B+、Bcom、B-对应接好就可以了,若是6线步进电机接4线驱动器便有2种接法,为半绕和全饶,半绕就是用一半的饶组,就是A相接A+、Acom或Acom、A-,B相接B+、Bcom或Bcom、B-,通俗讲就是用一半绕组,因为单极驱动通过A+、Acom正传,通过Acom、A-反转。半绕就是这样,故所有的电气参数和曲线图和单极基本一致,可以套用。 全饶是很容易用错电机的一种方式,一般6线的电机拿过来,就会照全饶接好,一看有A+A-B+B-接上就好了,结果电机发热又大还有可能烧电机,高速又没力矩,因为这种接法电机的参数改变了,电阻变为原来2倍,电感变为原来4倍,电流变为原来0.7倍,保持力矩变为原来1.4倍。所以4线电机全绕适合低速大力矩,半绕适合高速。 8线步进电机为最方便的电机,既能接6线电机,4线高速和4线低速,分为A+、A+com、A-、A-com、B+、B+com、B-、B-com,接6线就很简单,把A+com和A-com并一起做com端便可,4线高速则为A+和A-com并一起接A+,A+com和A-并一起接A-,4线低速则为A+
电动门的控制原理接线、调试步骤及常见故障处理
电动门的控制原理、调试步骤及常见故障处理 我厂使用的电动门和执行结构有扬州、常州、ROTORK、SIPOS、AUMA、瑞基、EMG 等系列。 一、概述 电动装置是电动阀门的驱动装置,用以控制阀门的开启和关闭。适用于闸阀、截止阀、节流阀、隔膜阀、其派生产品可适用于球阀、碟阀和风门等,它可以准确地按控制指令动作,是对阀门实现远控和自动控制的必不可少的驱动装置. 二、电动门的控制原理 (一)电动装置的结构 阀门电动装置由六个部分组成:即电机,减速器,控制机构,手--自动切换手轮及电气部分. 1、控制机构由转矩控制结构,行程控制机构及可调试开度指示器组成.用以控制阀门的开启和关闭及阀位指示. 1)转矩控制机构由曲拐、碰块、凸 轮、分度盘、支板和微动开关组成.当输 出轴受到一定的阻转矩后,蜗杆除旋转外 还产生轴向位移,带动曲拐旋转,同时使 碰块也产生一角位移,从而压迫凸轮,使 支板上抬.当输出轴上的转矩增大到预定 值时,则支板上抬直至微动开关动作,切 断电源,电机停转,以实现电动装置输出 转矩的控制. 2)行程控制机构由十进位齿轮组,顶 杆,凸轮和微动开关 组成,简称计数器.其 工作原理是由减速箱 内的主动小齿轮(Z=8) 带动计数器工作.如 果计数器已经按阀门 开或关的位置已调好, 当计数器随输出轴转 到预先调整好的位置 时,则凸轮将被转动 90度,压迫微动开关 动作,切断电源,电机停转,以实现对电动装置的控制. 2、手自动切换机构为半自动切换,电动转变为手动需要扳动切换手柄,而由手动变为电动时系自动进行。由电动变为手动时,即用人工把切换手柄向手动方向推动,使输出轴上的中间离合器向上移动,压迫压簧。当手柄推到一定位置时,中间离合器脱离蜗轮与手动轴爪啮合,则可使手轮上的作用力通过中间离合器传到输出轴上,即成为手动状态。手动变为电动为自动切换,当电机旋转带动蜗轮转动时,直立杆立即倒下,在压簧作用下中间离合器迅速向蜗轮方向移动,与手轮轴脱开,
手摇脉冲发生器接线方法
加手摇脉冲发生器接线方法 10芯接头: 1脚X5 5倍快速 2脚X轴 3脚Y轴 4脚手摇A相 5脚Z轴 6脚手摇B相 8脚C轴 37芯接头: 8脚启动/暂停/继续 18脚设置当前位置为零点 19脚回设置零点 3脚第5轴脉冲 4脚第5轴方向 三轴闭环光栅反馈接线方法 10芯接头:最右上角(方形焊盘为1脚,上排为1,3,5,7,9;下排为2,4,6,8,10)4脚X轴A相 6脚X轴B相 1脚Y轴A相 2脚Y轴B相 3脚Z轴A相 5脚Z轴B相 8脚开始 37芯接头: 8脚暂停
闭环反馈光栅尺接线图: 1 对于6线输出方式的光栅尺:输出A+、A- B+、B- Z+、Z- 。 其中: A+:正正弦 A-:付正弦 B+:正余弦 B-:付余弦 只接4根线,并需要用芯片26LS32将A+、A- 和B+、B- 合成为两个方波信号。 芯片26LS32: 1A- 1 16 +5V 1A+ 2 15 4A- 1Y 3 14 4A+ 4 13 4Y 2Y 5 12 2A+ 6 11 3Y 2A- 7 10 3A+ 地8 9 3A- 对于输出方波信号的光栅尺,不需要上述芯片。 2 用芯片26LS32做的转接板接口图 14芯输入口: 1 3 4 6 7 9 10 11 1 2 14 外接+5V (Y轴)U1- U1+ U2+ U2- (X轴)U1+ U1- U2+ U2- 外接地4芯输出口: 1 2 3 4 Y轴A Y轴B X 轴A X 轴B 3CNC卡上10芯接口图 YA 9 7 5 3 1 10 8 6 4 2 XB XA YB
4如果光栅尺的方向贴反了,请将A, B对换。