L293DD013TR;L293D;L293DD;E-L293DD013TR;中文规格书,Datasheet资料

L293D
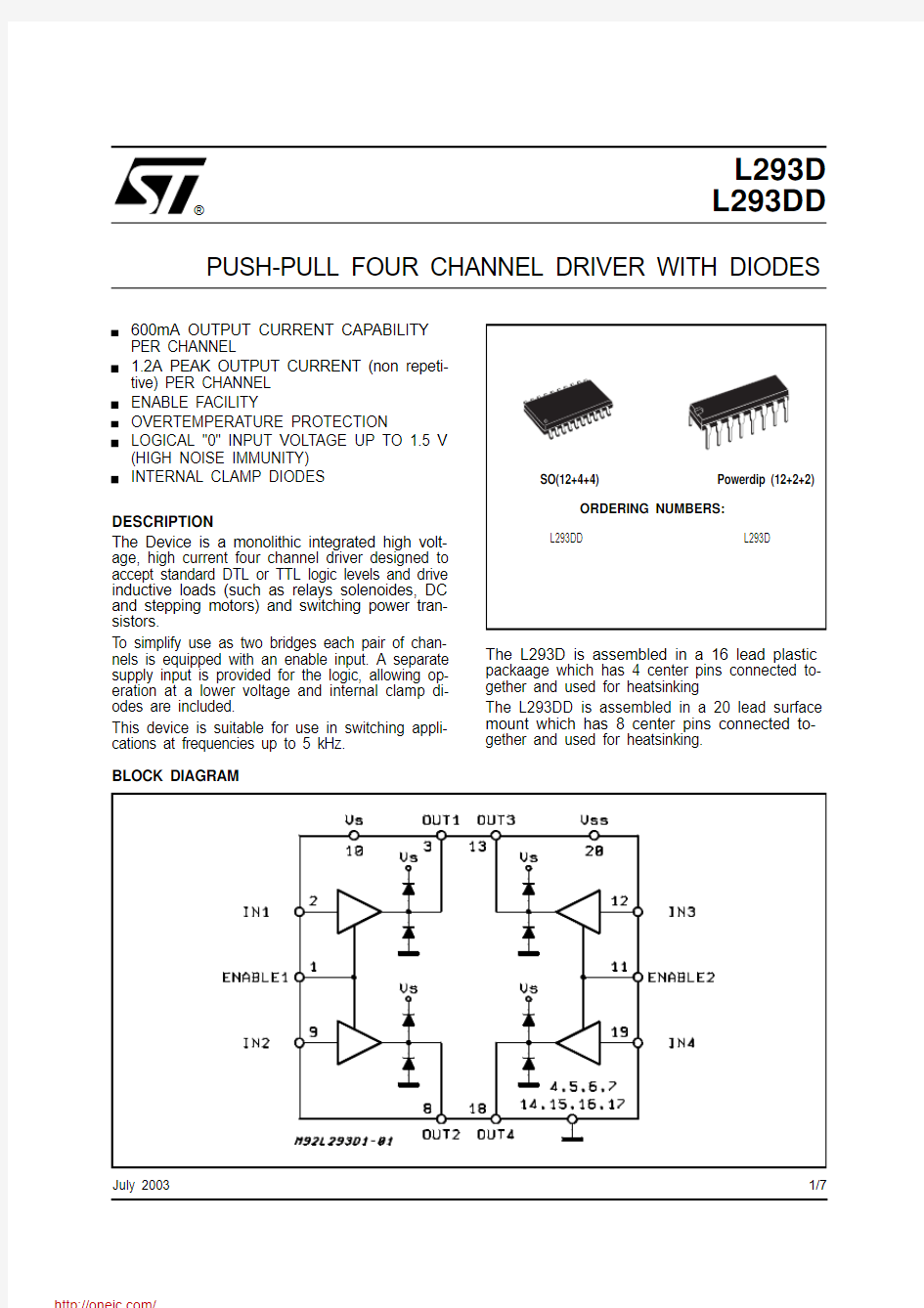
L293DD PUSH-PULL FOUR CHANNEL DRIVER WITH DIODES
600mA OUTPUT CURRENT CAPABILITY
PER CHANNEL
1.2A PEAK OUTPUT CURRENT (non repeti-
tive) PER CHANNEL
ENABLE FACILITY
OVERTEMPERATURE PROTECTION
LOGICAL "0" INPUT VOLTAGE UP TO 1.5 V
(HIGH NOISE IMMUNITY)
INTERNAL CLAMP DIODES
DESCRIPTION
The Device is a monolithic integrated high volt-
age, high current four channel driver designed to
accept standard DTL or TTL logic levels and drive
inductive loads (such as relays solenoides, DC
and stepping motors) and switching power tran-
sistors.
To simplify use as two bridges each pair of chan-nels is equipped with an enable input. A separate supply input is provided for the logic, allowing op-eration at a lower voltage and internal clamp di-odes are included.
This device is suitable for use in switching appli-cations at frequencies up to 5 kHz.The L293D is assembled in a 16 lead plastic packaage which has 4 center pins connected to-gether and used for heatsinking
The L293DD is assembled in a 20 lead surface mount which has 8 center pins connected to-gether and used for heatsinking.
July 2003?
BLOCK DIAGRAM SO(12+4+4) Powerdip (12+2+2)
ORDERING NUMBERS:
L293DD L293D
1/7
https://www.360docs.net/doc/a58785073.html,/
ABSOLUTE MAXIMUM RATINGS
Symbol Parameter Value Unit V S Supply Voltage36V V SS Logic Supply Voltage36V V i Input Voltage7V V en Enable Voltage7V
I o Peak Output Current (100 μs non repetitive) 1.2A
P tot Total Power Dissipation at T pins = 90 °C4W T stg, T j Storage and Junction Temperature– 40 to 150°C
PIN CONNECTIONS (Top view)
SO(12+4+4)Powerdip(12+2+2)
THERMAL DATA
Symbol Decription DIP SO Unit R th j-pins Thermal Resistance Junction-pins max.–14°C/W R th j-amb Thermal Resistance junction-ambient max.8050 (*)°C/W R th j-case Thermal Resistance Junction-case max.14–
(*) With 6sq. cm on board heatsink.
ELECTRICAL CHARACTERISTICS (for each channel, V S = 24 V, V SS = 5 V, T amb = 25 °C, unless otherwise specified)
Symbol Parameter Test Conditions Min.Typ.Max.Unit V S Supply Voltage (pin 10)V SS36V V SS Logic Supply Voltage (pin 20) 4.536V
I S Total Quiescent Supply Current
(pin 10)V i = L ; I O = 0 ; V en = H26mA V i = H ; I O = 0 ; V en = H1624mA V en = L4mA
I SS Total Quiescent Logic Supply
Current (pin 20)V i = L ; I O = 0 ; V en = H4460mA V i = H ; I O = 0 ; V en = H1622mA V en = L1624mA
V IL Input Low Voltage (pin 2, 9, 12,
19)
– 0.3 1.5V
V IH Input High Voltage (pin 2, 9,
12, 19)V SS≤ 7 V 2.3V SS V V SS > 7 V 2.37V
I IL Low Voltage Input Current (pin
2, 9, 12, 19)
V IL = 1.5 V– 10μA
I IH High Voltage Input Current (pin
2, 9, 12, 19)
2.3 V ≤ V IH≤ V SS – 0.6 V30100μA
V en L Enable Low Voltage
(pin 1, 11)
– 0.3 1.5V
V en H Enable High Voltage
(pin 1, 11)V SS≤ 7 V 2.3V SS V V SS > 7 V 2.37V
I en L Low Voltage Enable Current
(pin 1, 11)
V en L = 1.5 V– 30– 100μA
I en H High Voltage Enable Current
(pin 1, 11)
2.3 V ≤ V en H≤ V SS – 0.6 V± 10μA
V CE(sat)H Source Output Saturation
Voltage (pins 3, 8, 13, 18)
I O = – 0.6 A 1.4 1.8V
V CE(sat)L Sink Output Saturation Voltage
(pins 3, 8, 13, 18)
I O = + 0.6 A 1.2 1.8V
V F Clamp Diode Forward Voltage I O = 600nA 1.3V t r Rise Time (*)0.1 to 0.9 V O250ns t f Fall Time (*)0.9 to 0.1 V O250ns t on Turn-on Delay (*)0.5 V i to 0.5 V O750ns t off Turn-off Delay (*)0.5 V i to 0.5 V O200ns (*) See fig. 1.
TRUTH TABLE (one channel)
Input Enable (*)Output
H L H L H
H
L
L
H
L
Z
Z
Z = High output impedance
(*) Relative to the considered channel
Figure 1: Switching Times
Figure 2: Junction to ambient thermal resistance vs. area on board heatsink (SO12+4+4 package)
DIM.
mm inch
MIN.TYP.MAX.MIN.TYP.MAX. a10.510.020
B0.85 1.400.0330.055 b0.500.020
b10.380.500.0150.020 D20.00.787 E8.800.346
e 2.540.100
e317.780.700
F7.100.280 I 5.100.201
L 3.300.130
Z 1.270.050
Powerdip 16
OUTLINE AND MECHANICAL DATA
11011
20
A e
B
D
E L
K
H
A1C
SO20MEC
h x 45?
SO20
DIM.
mm inch
MIN.TYP.MAX.MIN.TYP.MAX.
A 2.35 2.650.0930.104 A10.10.30.0040.012 B0.330.510.0130.020 C0.230.320.0090.013 D12.6130.4960.512 E7.47.60.2910.299 e 1.270.050
H1010.650.3940.419 h0.250.750.0100.030 L0.4 1.270.0160.050 K0? (min.)8? (max.)
OUTLINE AND MECHANICAL DATA
Information furnished is believed to be accurate and reliable. However, STMicroelectronics assumes no responsibility for the consequences of use of such information nor for any infringement of patents or other rights of third parties which may result from its use. No license is granted by implication or otherwise under any patent or patent rights of STMicroelectronics. Specification mentioned in this publication are subject to change without notice. This publication supersedes and replaces all information previously supplied. STMicroelectronics products are not authorized for use as critical components in life support devices or systems without express written approval of STMicroelectronics.
The ST logo is a registered trademark of STMicroelectronics
? 2003 STMicroelectronics – Printed in Italy – All Rights Reserved
STMicroelectronics GROUP OF COMPANIES
Australia - Brazil - Canada - China - Finland - France - Germany - Hong Kong - India - Israel - Italy - Japan - Malaysia - Malta - Morocco -Singapore - Spain - Sweden - Switzerland - United Kingdom - United States.
https://www.360docs.net/doc/a58785073.html,
分销商库存信息:
STM
L293DD013TR L293D L293DD E-L293DD013TR
电机驱动芯片
自动0701 李欢20074998 LMD18200是美国国家半导体公司(NS)推出的专用于直流电动机驱动的H桥组件。同一芯片上集成有CMOS控制电路和DMOS功率器件,利用它可以与主处理器、电机和增量型编码器构成一个完整的运动控制系统。LMD18200广泛应用于打印机、机器人和各种自动化控制领域。 内部机构和引脚说明: 注释:光电编码器是通过读取光电编码盘上的图案或编码信息来表示与光电编码器相连的电机转子的位置信息的,即判断方位。 LMD18200工作原理:
内部集成了四个DMOS管,组成一个标准的H型驱动桥。通过充电泵电路为上桥臂的2个开关管提供栅极控制电压,充电泵电路由一个300kHz左右的工作频率。可在引脚1、11外接电容形成第二个充电泵电路,外接电容越大,向开关管栅极输入的电容充电速度越快,电压上升的时间越短,工作频率可以更高。引脚2、10接直流电机电枢,正转时电流的方向应该从引脚步到引脚10;反转时电流的方向应该从引脚10到引脚2。电流检测输出引脚8可以接一个对地电阻,通过电阻来输出过流情况。内部保护电路设置的过电流阈值为10A,当超过该值时会自动封锁输出,并周期性的自动恢复输出。如果过电流持续时间较长,过热保护将关闭整个输出。过热信号还可通过引脚9输出,当结温达到145度时引脚9有输出信号 LMD18200提供双极性驱动方式和单极性驱动方式。双极性驱动是指在一个PWM周期里,电动机电枢的电压极性呈正负变化。双极性可逆系统虽然有低速运行平稳性的优点,但也存在着电流波动大,功率损耗较大的缺点,尤其是必须增加死区来避免开关管直通的危险,限制了开关频率的提高,因此只用于中小功率直流电动机的控制。本文中将介绍单极性可逆驱动方式。单极性驱动方式是指在一个PWM周期内,电动机电枢只承受单极性的电压。 该应用电路是Motorola 68332CPU与LMD18200接口例子,它们组成了一个单极性驱动直流电机的闭环控制电路。在这个电路中,PWM控制信号是通过引脚5输入的,而转向信号则通过引脚3输入。根据PWM控制信号的占空比来决定直流电机的转速和转向。采用一个增量型光电编码器来反馈电动机的实际位置,输出AB两相,检测电机转速和位置,形成闭环位置反馈,从而达到精确控制电机。
直流电机驱动电路设计
直流电机驱动电路设计 一、直流电机驱动电路的设计目标 在直流电机驱动电路的设计中,主要考虑一下几点: 1. 功能:电机是单向还是双向转动?需不需要调速?对于单向的电机驱动,只要用一个大功率三极管或场效应管或继电 器直接带动电机即可,当电机需要双向转动时,可以使用由4个功率元件组成的H桥电路或者使用一个双刀双掷的继电器。 如果不需要调速,只要使用继电器即可;但如果需要调速,可以使用三极管,场效应管等开关元件实现PWM(脉冲宽度调制)调速。 2. 性能:对于PWM调速的电机驱动电路,主要有以下性能指标。 1)输出电流和电压范围,它决定着电路能驱动多大功率的电机。 2)效率,高的效率不仅意味着节省电源,也会减少驱动电路的发热。要提高电路的效率,可以从保证功率器件的开关工作状态和防止共态导通(H桥或推挽电路可能出现的一个问题,即两个功率器件同时导通使电源短路)入手。 3)对控制输入端的影响。功率电路对其输入端应有良好的信号隔离,防止有高电压大电流进入主控电路,这可以用高的输入阻抗或者光电耦合器实现隔离。 4)对电源的影响。共态导通可以引起电源电压的瞬间下降造成高频电源污染;大的电流可能导致地线电位浮动。 5)可靠性。电机驱动电路应该尽可能做到,无论加上何种控制信号,何种无源负载,电路都是安全的。 二、三极管-电阻作栅极驱动
1.输入与电平转换部分: 输入信号线由DATA引入,1脚是地线,其余是信号线。注意1脚对地连接了一个2K欧的电阻。当驱动板与单片机分别供电时,这个电阻可以提供信号电流回流的通路。当驱动板与单片机共用一组电源时,这个电阻可以防止大电流沿着连线流入单片机主板的地线造成干扰。或者说,相当于把驱动板的地线与单片机的地线隔开,实现“一点接地”。 高速运放KF347(也可以用TL084)的作用是比较器,把输入逻辑信号同来自指示灯和一个二极管的2.7V基准电压比较,转换成接近功率电源电压幅度的方波信号。KF347的输入电压范围不能接近负电源电压,否则会出错。因此在运放输入端增加了防止电压范围溢出的二极管。输入端的两个电阻一个用来限流,一个用来在输入悬空时把输入端拉到低电平。 不能用LM339或其他任何开路输出的比较器代替运放,因为开路输出的高电平状态输出阻抗在1千欧以上,压降较大,后面一级的三极管将无法截止。 2.栅极驱动部分: 后面三极管和电阻,稳压管组成的电路进一步放大信号,驱动场效应管的栅极并利用场效应管本身的栅极电容(大约 1000pF)进行延时,防止H桥上下两臂的场效应管同时导通(“共态导通”)造成电源短路。 当运放输出端为低电平(约为1V至2V,不能完全达到零)时,下面的三极管截止,场效应管导通。上面的三极管导通,场效应管截止,输出为高电平。当运放输出端为高电平(约为VCC-(1V至2V),不能完全达到VCC)时,下面的三极管导通,场效
实用的步进电机驱动电路图
实用的步进电机驱动电路(图) 概述 步进电机是一种将电脉冲转化为角位移的执行机构,可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。 目前,对步进电机的控制主要有由分散器件组成的环形脉冲分配器、软件环形脉冲分配器、专用集成芯片环形脉冲分配器等。本设计选用第三种方案,用PMM8713三相或四相步进电机的脉冲分配器、SI-7300A 两相或四相功率驱动器,组成四相步进电机功率驱动电路,以提高集成度和可靠性,步进电机控制框图见图1。 图1 步进电机控制系统框图 硬件简介 ● PMM8713原理框图及功能 PMM8713是日本三洋电机公司生产的步进电机脉冲分配器,适用于控制三相或四相步进电机。控制三相或四相步进电机时都可以选择3种励磁方式,每相最小吸入与拉出电流为20mA,它不仅满足后级功率放大器的输入要求,而且在其所有输入端上均内嵌施密特触发电路,抗干扰能力强,其原理框图如图2所示。
图2 PMM8713的原理框图 在PMM8713的内部电路中,时钟选通部分用于设定步进电机的正反转脉冲输入发。PMM8713有两种脉冲输入法:双脉冲输入法和单脉冲输入法。采用双脉冲输入法时,CP、CU两端分别输入步进电机正反转的控制脉冲。当采用单脉冲输入时,步进电机的正反转方向由U/D的高、低电位决定。 激励方式控制电路用来选择采用何种励磁方式。激励方式判断电路用于输出检测;而可逆环形计数器则用于产生步进电机在选定的励磁方式下的各相通断时序信号。 ● SI-7300A的结构及功率驱动原理 SI-7300A是日本三青公司生产的高性能步进电机集成功率放大器,该器件为单极性四相驱动,采用SIP18封装。 步进电机功率驱动级电路可分为电压和电流两种驱动方式。电流驱动方式最常用的是PWM恒流斩波驱动电路,也是最常用的高性能驱动方式,其中一相的等效电路图如图3所示。
L298电机驱动芯片资料
L298 Jenuary 2000DUAL FULL-BRIDGE DRIVER Multiwatt15 ORDERING NUMBERS :L298N (MultiwattVert. L298HN (MultiwattHoriz. L298P (PowerSO20 BLOCK DIAGRAM . OPERATING SUPPLY VOLTAGE UP TO 46V . TOTAL DC CURRENT UP TO 4A . LOW SATURATION VOLTAGE . OVERTEMPERATURE PROTECTION . LOGICAL ”0”INPUT VOLTAGE UP TO 1.5V (HIGHNOISE IMMUNITY DESCRIPTION The L298is an integrated monolithic circuit in a 15-lead Multiwatt and PowerSO20packages. It is a high voltage, high current dual full-bridge driver de-signedto acceptstandardTTL logic levels anddrive inductive loads such as relays, solenoids, DC and steppingmotors. Two enableinputs are provided to enableor disablethe deviceindependentlyof thein-put signals. The emitters of the lower transistors of each bridge are connected togetherand the corre-sponding external terminal can be used for the con-nectionof an externalsensing resistor.Anadditional supply input is provided so that the logic works at a lower voltage. PowerSO20
解析国标图集_常用电机控制电路图_
BUILDING ELECTRICITY 2011年 第期 Jun.2011Vol.30No.6 6 *:国家科技支撑计划子课题,课题名称:村镇小康住宅规划设计成套技术研究(课题任务书编号:2006BAJ04A01),子课 题名称:村镇住宅设备与设施设计技术集成及软件开发(子课题任务书编号:2006BAJ04A01-3)。Xu Lingxian Sun Lan (China Institute of Building Standard Design &Research ,Beijing 100048,China ) 徐玲献 孙 兰(中国建筑标准设计研究院,北京市 100048) Explanation and Analysis of National Standardization Collective Drawings Control Circuit Diagrams of Common Electric Machines * 解析国标图集《常用电机控制电路图》摘 要 对多年来国家建筑标准设计图集 10D303-2~3《常用电机控制电路图》(2010年合订本,已修编出版发行)使用中遇到的疑问进行汇总、解析,以加深读者对10D303-2~3的理解。 关键词信号灯端子标志消防控制室的监控消防风机消防水泵 过负荷 水源水池水位 双 速风机 0引言 国家建筑标准设计图集10D303-2~3《常用电 机控制电路图》 (2010年合订本) (以下简称 10D303)适用于民用及一般工业建筑内3/N /PE ~220/380V 50Hz 系统中常用风机和水泵的控制,是对99D303-2《常用风机控制电路图》和01D303-3《常用水泵控制电路图》的修编。根据现行的国家标 准,对图集中涉及到的项目分类代码和图形符号进行了修改,并在原图集方案的基础上,增加了两用单速风机、平时用双速风机、射流风机联动排风机及冷冻(冷却)水泵控制电路图。根据节能环保的要求,增加了YDT 型双速风机的控制方案。并根据电气产品的发展,增加了控制与保护开关电器(CPS )和电机控制器的控制方案,供设计人员直接选用。 10D303从立项调研、修编到送印,历经两年多的时间,期间收到了不少反馈意见和建议,为图集的编制提供了宝贵的建议,在此答谢。 《常用电机控制电路图》 (2002年合订本)发行 十余年中一直受到读者青睐,使用者涉及设计、生产和建造等多领域,通过国标热线和其他途径咨询问题的读者很多。问题中除风机和水泵的控制电路外,经常牵涉到现行的国家标准、制图要求和电气设计技术等多方面的内容,有些问题无法通过修编图集 10D303直接解决,因此借助《建筑电气》平台,把《常用电机控制电路图》经常咨询的问题归纳汇总、解析,以利于读者更好使用和理解10D303图集。 1有关国家标准、规范和制图要求的问题 1.1指示器(信号灯)和操作器(按钮)的颜色 标识 10D303中有关信号灯和按钮的颜色标识是依据国家标准GB /T 4025-2003/IEC 60073:1996《人-机界面标志标识的基本和安全规则 指示器和 作者信息 徐玲献,女,中国建筑标准设计研究院,高级工程师,主任工程师。 孙兰,女,中国建筑标准设计研究院,教授级高级工程师,院副总工程师。 Abstract The collective drawings of national building standard design 10D303-2~3Control Circuit Diagrams of Common Electric Machines (2010bound volume )has been revised and published.This paper summarizes and analyzes the questions encountered during use over the years so as to deepen the readers 'understanding of the collective drawings. Key words Signal light Terminal symbol Fire control room monitoring Fire fan Fire pump Overload Water level of the water tank of water source Two -speed fans * 34 330
直流电机驱动电路设计
应用越来越广泛的直流电机,驱动电路设计 Source:电子元件技术| Publishing Date:2009-03-20 中心论题: ?在直流电机驱动电路的设计中,主要考虑功能和性能等方面的因素 ?分别介绍几种不同的栅极驱动电路并比较其性能优缺点 ?介绍PWM调速的实现算法及硬件电路 ?介绍步进电机的驱动方案 解决方案: ?根据实际电路情况以及要求仔细选择驱动电路 ?使用循环位移算法及模拟电路实现PWM调速 ?对每个电机的相应时刻设定相应的分频比值,同时用一个变量进行计数可实现步进电机的分频调速 直流电机驱动电路的设计目标 在直流电机驱动电路的设计中,主要考虑一下几点: 功能:电机是单向还是双向转动?需不需要调速?对于单向的电机驱动,只要用一个大功率三极管或场效应管或继电器直接带动电机即可,当电机需要双向转动时,可以使用由4个功率元件组成的H桥电路或者使用一个双刀双掷的继电器。如果不需要调速,只要使用继电器即可;但如果需要调速,可以使用三极管,场效应管等开关元件实现PWM(脉冲宽度调制)调速。 性能:对于PWM调速的电机驱动电路,主要有以下性能指标。 1。输出电流和电压围,它决定着电路能驱动多大功率的电机。 2。效率,高的效率不仅意味着节省电源,也会减少驱动电路的发热。要提高电路的效率,可以从保证功率器件的开关工作状态和防止共态导通(H桥或推挽电路可能出现的一个问题,即两个功率器件同时导通使电源短路)入手。 3。对控制输入端的影响。功率电路对其输入端应有良好的信号隔离,防止有高电压大电流进入主控电路,这可以用高的输入阻抗或者光电耦合器实现隔离。
4。对电源的影响。共态导通可以引起电源电压的瞬间下降造成高频电源污染;大的电流可能导致地线电位浮动。 5。可靠性。电机驱动电路应该尽可能做到,无论加上何种控制信号,何种无源负载,电路都是安全的。 三极管-电阻作栅极驱动 1.输入与电平转换部分: 输入信号线由DATA引入,1脚是地线,其余是信号线。注意1脚对地连接了一个2K欧的电阻。当驱动板与单片机分别供电时,这个电阻可以提供信号电流回流的通路。当驱动板与单片机共用一组电源时,这个电阻可以防止大电流沿着连线流入单片机主板的地线造成干扰。或者说,相当于把驱动板的地线与单片机的地线隔开,实现“一点接地”。 高速运放KF347(也可以用TL084)的作用是比较器,把输入逻辑信号同来自指示灯和一个二极管的2。7V 基准电压比较,转换成接近功率电源电压幅度的方波信号。KF347的输入电压围不能接近负电源电压,否则会出错。因此在运放输入端增加了防止电压围溢出的二极管。输入端的两个电阻一个用来限流,一个用来在输入悬空时把输入端拉到低电平。
电机驱动电路总结
电机驱动电路 一、直流电机驱动电路的设计目标 在直流电机驱动电路的设计中,主要考虑一下几点: 1.功能:电机是单向还是双向转动?需不需要调速?对于单向的电机驱动,只要用一个大功率三极管或场效应管或继电器直接带动电机 即可,当电机需要双向转动时,可以使用由4个功率元件组成的H 桥电路或者使用一个双刀双掷的继电器。如果不需要调速,只要使 用继电器即可;但如果需要调速,可以使用三极管,场效应管等开 关元件实现PWM(脉冲宽度调制)调速。 2.性能:对于PWM调速的电机驱动电路,主要有以下性能指标。 1)输出电流和电压范围,它决定着电路能驱动多大功率的电机。
2)效率,高的效率不仅意味着节省电源,也会减少驱动电路的发热。 要提高电路的效率,可以从保证功率器件的开关工作状态和防止共态导通(H桥或推挽电路可能出现的一个问题,即两个功率器件同时导通使电源短路)入手。 3)对控制输入端的影响。功率电路对其输入端应有良好的信号隔离,防止有高电压大电流进入主控电路,这可以用高的输入阻抗或者光电耦合器实现隔离。 4)对电源的影响。共态导通可以引起电源电压的瞬间下降造成高频电源污染;大的电流可能导致地线电位浮动。 5)可靠性。电机驱动电路应该尽可能做到,无论加上何种控制信号,何种无源负载,电路都是安全的。 二、三极管-电阻作栅极驱动 (如果电路看不清楚请到相册里看) 1.输入与电平转换部分: 输入信号线由DATA引入,1脚是地线,其余是信号线。注意1脚对地连接了一个2K欧的电阻。当驱动板与单片机分别供电时,这个电阻可以提供信号电流回流的通路。当驱动板与单片机共用一组电源时,这个电阻可以防止大电流沿着连线流入单片机主板的地线造成干扰。或者说,相当于把驱动板的地线与单片机的地线隔开,实现“一点接地”。 高速运放KF347(也可以用TL084)的作用是比较器,把输入逻辑信号同来自指示灯和一个二极管的2.7V基准电压比较,转换成接近功率电源电压幅度的方波信号。KF347的输入电压范围不能接近负电源电压,否则会出错。因此在运放输入端增加了防止电压范围溢出的二极管。输入端的两个电阻一个用来限流,一个用来在输入悬空时把输入端拉到低电平。 不能用LM339或其他任何开路输出的比较器代替运放,因为开路输出的高电平状态输出阻抗在1千欧以上,压降较大,后面一级的三极管将无法截止。2.栅极驱动部分: 后面三极管和电阻,稳压管组成的电路进一步放大信号,驱动场效应管的栅极并利用场效应管本身的栅极电容(大约1000pF)进行延时,防止H桥上下两臂的场效应管同时导通(“共态导通”)造成电源短路。 当运放输出端为低电平(约为1V至2V,不能完全达到零)时,下面的三极管截止,场效应管导通。上面的三极管导通,场效应管截止,输出为高电平。当运放输出端为高电平(约为VCC-(1V至2V),不能完全达到VCC)时,下面的三极管导通,场效应管截止。上面的三极管截止,场效应管导通,输出为低电平。 上面的分析是静态的,下面讨论开关转换的动态过程:三极管导通电阻远小于2千欧,因此三极管由截止转换到导通时场效应管栅极电容上的电荷可以迅速释放,场效应管迅速截止。但是三极管由导通转换到截止时场效应管栅极通过2千欧电阻充电却需要一定的时间。相应的,场效应管由导通转换到截止的速度要比由截止转换到导通的速度快。假如两个三极管的开关动作是同时发生的,这个电路可以让上下两臂的场效应管先断后通,消除共态导通现象。
步进电机驱动电路设计
https://www.360docs.net/doc/a58785073.html,/gykz/2010/0310/article_2772.html 引言 步进电机是一种将电脉冲转化为角位移的执行机构。驱动器接收到一个脉冲信号后,驱动步进电机按设定的方向转动一个固定的角度。首先,通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;其次,通过控制脉冲顿率来控制电机转动的速度和加速度,从而达到涮速的目的。目前,步进电机具有惯量低、定位精度高、无累积误差、控制简单等特点,在机电一体化产品中应用广泛,常用作定位控制和定速控制。步进电机驱动电路常用的芯片有l297和l298组合应用、3977、8435等,这些芯片一般单相驱动电流在2 a左右,无法驱动更大功率电机,限制了其应用范围。本文基于东芝公司2008年推出的步进电机驱动芯片tb6560提出了一种步进电机驱动电路的设计方案 1步进电机驱动电路设计 1.1 tb6560简介 tb6560是东芝公司推出的低功耗、高集成两相混合式步进电机驱动芯片。其主要特点有:内部集成双全桥mosfet驱动;最高耐压40 v,单相输出最大电流3.5 a(峰值);具有整步、1/2、1/8、1/16细分方式;内置温度保护芯片,温度大于150℃时自动断开所有输出;具有过流保护;采用hzip25封装。tb6560步进电机驱动电路主要包括3部分电路:控制信号隔离电路、主电路和自动半流电路。 1.2步进电机控制信号隔离电路 步进电机控制信号隔离电路如图1所示,步进电机控制信号有3个(clk、cw、enable),分别控制电机的转角和速度、电机正反方向以及使能,均须用光耦隔离后与芯片连接。光耦的作用有两个:首先,防止电机干扰和损坏接口板电路;其次,对控制信号进行整形。对clk、cw信号,要选择中速或高速光耦,保证信号耦合后不会发生滞后和畸变而影响电机驱动,且驱动板能满足更高脉冲频率驱动要求。本设计中选择2片6n137高速光耦隔离clk、cw,其信号传输速率可达到10 mhz,1片tlp521普通光耦隔离enable信号。应用时注意:光耦的同向和反向输出接法;光耦的前向和后向电源应该是单独隔离电源,否则不能起到隔离干扰的作用。
19 IR_IRMCK F171-灵活易用的电机控制芯片
IRMCK/F171-灵活易用的电机控制芯片 IRMCK/F171 灵活易用的电机控制芯片
国际整流器公司 2012-1-11
内容
? 概述 概 ? 传统方案存在的问题 ? IR的解决方案:简单易用的电机控制 芯片IRMCF171 ? 方案辅助工具和测试结果 ? 结论
概述
? 全球能源短缺导致越来越严格的政府节能规章出 台 ? 在中国 能效标签制度的实施以及能效标准的不 在中国,能效标签制度的实施以及能效标准的不 断提高使很多电器转向变频控制 ? 变频空调已经完全确立了市场的主导地位 ? 家电的变频化趋势也越来越明确,电机调速市场 竞争将更加激烈,产品更新的周期越来越短。随 之而来的新产品研发风险也越来越大 之而来的新产品研发 险也越来越大 ? 节能热点:
– – – – 高效率永磁电机 无位置传感正弦波控制 宽的调速范围 低的振动和噪声
传统方案存在的问题
? ? ? ? 大容量存储单元的高速DSP或32位单片机 软件算法复杂,控制器计算任务繁重 软件算法复杂 控制器计算任务繁重 对于传统的软件编程控制方案,完成电机控制算法已经很复杂, 对于系统设计人员的要求很高
1. 2. 3. 熟悉实时的FOC控制算法,熟悉相关的外设; 熟悉DSP或32位RISC的C或汇编语言编程; 熟悉各种数模混合电路,高压电路和功率开关电路.
?
?
开发周期长,开发成本和开发风险都很高
后续的软件维护成本高
电机控制系统框图
IR电机控制IC-IRMCF171
步进电机驱动电路设计
步进电机驱动电路设计 摘要 随着数字化技术发展,数字控制技术得到了广泛而深入的应用。步进电机是一种将数字信号直接转换成角位移或线位移的控制驱动元件, 具有快速起动和停止的特点。因为步进电动机组成的控制系统结构简单,价格低廉,性能上能满足工业控制的基本要求,所以广泛地应用于手工业自动控制、数控机床、组合机床、机器人、计算机外围设备、照相机,投影仪、数码摄像机、大型望远镜、卫星天线定位系统、医疗器件以及各种可控机械工具等等。直流电机广泛应用于计算机外围设备( 如硬盘、软盘和光盘存储器) 、家电产品、医疗器械和电动车上, 无刷直流电机的转子都普遍使用永磁材料组成的磁钢, 并且在航空、航天、汽车、精密电子等行业也被广泛应用。在电工设备中的应用,除了直流电磁铁(直流继电器、直流接触器等)外,最重要的就是应用在直流旋转电机中。在发电厂里,同步发电机的励磁机、蓄电池的充电机等,都是直流发电机;锅炉给粉机的原动机是直流电动机。此外,在许多工业部门,例如大型轧钢设备、大型精密机床、矿井卷扬机、市内电车、电缆设备要求严格线速度一致的地方等,通常都采用直流电动机作为原动机来拖动工作机械的。直流发电机通常是作为直流电源,向负载输出电能;直流电动机则是作为原动机带动各种生产机械工作,向负载输出机械能。在控制系统中,直流电机还有其它的用途,例如测速电机、伺服电机等。他们都是利用电和磁的相互作用来实现向机械能能的转换。 介绍了步进电机和直流电机原理及其驱动程序控制控制模块,通过AT89S52单片机及脉冲分配器(又称逻辑转换器)L298完成步进电机和直流电机各种运行方式的控制。实现步进电机的正反转速度控制并且显示数据。整个系统采用模块化设计,结构简单、可
步进电机控制驱动电路设计.
实习名称:电子设计制作与工艺实习 学生姓名:周文生 学号:201216020134 专业班级:T-1201 指导教师:李文圣 完成时间: 2014年6月13日 报告成绩:
步进电机控制驱动电路设计 摘要: 本设计在根据已有模电、物电知识的基础上,用具有置位,清零功能的JK 触发器74LS76作为主要器件来设计环行分配器,来对555定时器产生的脉冲进行分配,通过功率放大电路来对步进电机进行驱动,并且产生的脉冲的频率可以控制,从而来控制步进电机的速度,环形分配器中具有复位的功能,在对于异常情况可以按复位键来重新工作。 关键字:555定时器脉冲源环行分配器功率放大电路 一、方案论证与比较: (一)脉冲源的方案论证及选择: 方案一:采用555定时器产生脉冲,它工作频率易于改变从而可以控制步进电机的速度并且工作可靠,简单易行。 C2 10uF 图一 555定时器产生的方法 方案二:采用晶振电路来实现,晶振的频率较大,不利于电机的工作,易失步,我们可以利用分频的方法使晶振的频率变小,可以使电机工作稳定,但分频电路较复杂,并且晶振起振需要一定的条件,不好实现。
X1 1kohm 1kohm 图二晶振产生脉冲源电路 综上所述,我们采用方案一来设计脉冲源。 (二)环形分配器的设计: 方案一:采用74ls194通过送入不同的初值来进行移位依此产生正确的值使步进电机进行转动。但此方案的操作较复杂,需要每次工作时都要进行置位,正反转的操作较复杂,这里很早的将此方案放弃。 方案二:使用单独的JK 触发器来分别实现单独的功能。 图三双三拍正转 图四单三拍正转
图五三相六拍正转 利用单独的做,电路图较简单,单具体操作时不方便,并且不利于工程设计。块分的较零散,无法统一。 方案三:利用JK触发器的自己运动时序特性设计,利用卡诺图来进行画简。 图六单,双三拍的电路图 单,双三拍的正,反转主要由键s1,s2的四种状态来决定四种情况的选择。
步进电机驱动程序(汇编)
附件: ORG 0000H LJMP MAIN ORG 0003H LJMP Speed_Up ORG 0013H LJMP Speed_Down ORG 0100H MAIN: ;打开外部中断IT0/IT1 SETB EA SETB EX0 SETB EX1 SETB IT0 SETB IT1 ;扫描键盘,无键按下显示0,并继续扫描 MAKEY: MOV DPTR,#TAB MOV A,#0 MOVC A,@A+DPTR MOV P0,A MOV P3,#0FFH MOV A,P3 CPL A JZ MAKEY LCALL D10MS JZ MAKEY ;当有键按下时,启动步行电机转动 Speed EQU 20H Num EQU 21H MOV Speed,#60 ;Speed初始化,Speed控制延时的时间,即脉冲的频率 MOV Num,#1 ;Num初始化,Num存放数码管显示的转速数值 JNB ACC.4,TO_TWO ;默认设置为正向转动,转速为1,当有反向键按下,按反向转动 ;------------------------ 1号程序:控制步行电机正转-------------------------------- TO_ONE:
MOV R7,#4 MOV A,#01H MOV P3,#0FFH LP1: MOV P1,A LCALL DELAY LCALL DISPLAY RL A ; 正向输入脉冲信号 DJNZ R7,LP1 JNB P3.4,TO_TWO ; 有反向键按下,跳转到2号程序 LJMP TO_ONE ;------------------------2号程序:控制步行电机反转---------------------------------- TO_TWO: MOV R7,#4 MOV A,#08H MOV P3,#0FFH LP2: MOV P1,A LCALL DELAY LCALL DISPLAY RR A ; 反向输入脉冲信号 DJNZ R7,LP2 JNB P3.5,TO_ONE ;有正向键按下,跳转到1号程序 LJMP TO_TWO ;----------------------------中断服务程序----------------------------------------------- Speed_Up: ; 外部中断IT0,控制加速 PUSH ACC LCALL D10MS MOV A,Speed CJNE A,#12,L1 ; 最大速度时,速度不再增加 LJMP L2 L1: ; 速度加1(减小脉冲周期) SUBB A,#12 MOV Speed,A INC Num L2: POP ACC RETI Speed_Down: ;外部中断IT1,控制减速 PUSH ACC
步进电机驱动芯片THB6064
THB6064H大功率、高细分两相混合式 步进电机芯片式驱动器
一. 特性: ● 双全桥MOSFET驱动,低导通电阻导通Ron = 0.4 Ω (上桥+下桥) ,大电流4.5V(峰值) ● 高耐压50V DC ● 多细分可选(1/2,1/8,1/10, 1/16, 1/20, 1/32, 1/40, 1/64) ● 自动半流锁定 ● 衰减方式连续可调 ● 内置温度保护及过流保护 重量:9.86 g (typ.) 二. 框图
三. 管脚说明:
管脚 编号 输入/ 输出 符号 功 能 描 述 1 输出 ALERT 温度波爱护及过流保护输出端(常态为1,过流保护时为0) 2 —— SGND 信号地外部与电源地相连 3 —— OSC1B B相斩波频率控制端 4 输入 PFD 衰减方式控制端 5 输入 V ref 电流设定端(0——3V) 6 输入 VMB 电机驱动电源 B相电源 与A相电源相连 7 输入 M1 细分数选择端(详见附表) 8 输入 M2 细分数选择端(详见附表) 9 输入 M3 细分数选择端(详见附表) 10 输出 OUT2B B相功率桥输出端2 11 —— NFB B相电流检测端 应连接大功率检测电阻,典型值0.15Ω 12 输出 OUT1B B相功率桥输出端1 13 —— PGNDB B相驱动电源地与A相电源地及信号地相连 14 输出 OUT2A A相功率桥输出端2 15 —— NFA A相电流检测端 应连接大功率检测电阻,典型值0.15Ω 16 输出 OUT1A A相功率桥输出端1 17 —— PGNDA A相驱动电源地与B相电源地及信号地相连 18 输入 ENABLE 使能端ENABLE=0所有输出为0,ENABLE=1正常工作 19 输入 RESET 上电复位端 20 输入 VMA 电机驱动电源A相电源 与B相电源相连 21 输入 CLK 脉冲输入端 22 输入 CW/CCW 电机正反转控制端 23 —— OSC1A A相斩波频率控制端 24 输入 V DD 5V电源 芯片工作电源要求稳定 25 输出 Down 半流锁定控制端 四. 电气参数: 最高额定值Absolute Maximum Ratings(Ta =25℃)
电源供电以及电机驱动原理与电路分析
电源供电以及电机驱动原理与电路分析 第一部分:供电电路原理 供电部分原理图如图1-1所示: 图1-1 从图1-1中可知道供电有+5V、+3.3V、+1.5V三种,其中每个电源均有0.1μF的旁路电容,将电源中的高频串扰旁路到地,防止高频信号通过电源串扰到其它模块中。同时还能将电源本身的工频干扰滤除。 值得注意的是:在布线的时候,经退藕电容退藕后的电源输出点应该尽量紧靠芯片的电源引脚进行供电,过长的引线有可能重新变成干扰接收天线,导致退藕效果消失。如果无法让每个退藕后的电源输出点均紧靠芯片的电源引脚,那么可以采用分别退藕的方法,即分别尽量紧靠每个芯片的电源引脚点接入退藕电容进行退藕,这也解释了为什么图1-1的3.3V电源有两个退藕输出点。
第二部分:电机驱动电路原理 电机驱动电路原理如图2-1所示: 图2-1 图2-1中Header 4X2为4排2列插针,FM0~3为FPGA 芯片I/O 输出口,加入的插针给予一个可动的机制,在需要使用时才用跳线帽进行相连,提高I/O 口的使用效率。RES5是五端口排阻,内部集成了4个等阻值且一端公共连接的电阻,PIN 1是公共端,PIN2~5为排阻的输出端,排阻原理图如图2-2所示: 图2-2 该排阻公共端接电源,即上拉电阻形式,作用是增强FPGA 芯片I/O 口(以下简称I/O 口)的驱动能力,实际上就是增加I/O 输出高电平时输出电流的大小。当I/O 输出高电平时,+5V 电源经排阻与IN1~4相连,相当于为I/O 提供一个额外的电流输出源,从而提高驱动能力。当I/O 输出低电平时,可将I/O 近似看做接地,而IN1~4因与I/O 由导线直接相连,因此直接接受了I/O 的低电平输出信号。此时,+5V 电源经排阻R 、I/O 内部电路(电阻近似为零)后接地,因此该路的电流不能大于I/O 的拉电流(i I )最大值,有公式2-1: i I R V ≤+5(公式2-1) 即 i I V R 5+≥(公式2-2) 由公式2-2可以得出排阻的取值范围。 该上拉电阻除了提高驱动能力外,还有一个作用,就是进行电平转换。经查,ULN2003的接口逻辑为:5V-TTL, 5V-CMOS 逻辑。而在3.3V 供电的情况下,I/O 口可以提供3.3V-LVTTL , 3.3V-LVCMOS ,3.3V-PCI 和SSTL-3接口逻辑电平。因此,需要外接5V 的上拉电阻将I/O 电平规格变成5V 电平逻辑。
电机驱动电路的设计
《电子线路CAD》课程论文题目:电机驱动电路的设计
1 电路功能和性能指标 此电路是用MCU发出的PWM波来控制电机的转速的电路,电路输入电压是7.2V。 2 原理图设计 2.1原理图元器件制作 元器件截图: 图1 这个是图中的BTN7971的原理图,是一款电机驱动半桥芯片。 制作步骤: 1.点击菜单栏的放置,然后点击弹出的窗口中的矩形,如下图: 图2 2.然后鼠标光标下就会出现一个黄色的矩形边框,自己就可以随意设置边框的大小,之后框图的大小可以拖动修改,如下图:
图3 3.框图定好后,点击下图的图标,可以进行画引脚: 图4 4.放引脚时可以按table键设置引脚属性: 图5 2.2 原理图设计 ①原理图设计过程: 首先简历里一个PCB工程项目,保存命名为BTN驱动,然后在这个工程下面
建立一个原理图文件和一个PCB文件,并将其保存并重命名为BTN在与工程相同的目录下面,然后开始绘制原理图了,将所有设置默认为初始状态不需要更改,然后开始画原理图了,将其模块化绘图比较方便好看。 ②下面就是绘制成功后的原理图: 图6 ③下图为massage框图: 图7 其操作步骤为: 1.点击system中的message, 2.然后点击下图中高亮部分 图8
3.最后打开message就可以看见编译信息了 4.之后根据错误提示进行查找修改,直至没有错误和警告,如下图: 图9 ④该项目的元器件库截图如下: 图10 图11
生成原理图库的步骤为: 1.点击界面右下角的design compiler,然后点击如图高亮部分: 图12 2.点击界面上面的工具栏中的设计,然后点击高亮部分: 图13 3.最后可以查看刚才打开的navigater,如图:
步进电机驱动器的技术发展
将“电机固有步距角”细分成若干小步的驱动方法,称为细分驱动,细分是通过驱动器精确控制步进电机的相电流实现的,与电机本身无关。其原理是,让定子通电相电流并不一次升到位,而断电相电流并不一次降为0(绕组电流波形不再是近似方波,而是N级近似阶梯波),则定子绕组电流所产生的磁场合力,会使转子有N个新的平衡位置(形成N个步距角)。 最新技术发展: 国内外对细分驱动技术的研究十分活跃,高性能的细分驱动电路,可以细分到上千甚至任意细分。目前已经能够做到通过复杂的计算使细分后的步距角均匀一致,大大提高了步进电机的脉冲分辨率,减小或消除了震荡、噪声和转矩波动,使步进电机更具有“类伺服”特性。 采用细分技术与步进电机精度提高的关系:步进电机的细分技术实质上是一种电子阻尼技术,其主要目的是减弱或消除步进电机的低频振动,提高电机的运转精度只是细分技术的一个附带功能。 步电机系统解决方案
细分后电机运转时对每一个脉冲的分辨率提高了,但运转精度能 否达到或接近脉冲分辨率还取决于细分驱动器的细分电流控制精度 等其它因素。不同厂家的细分驱动器精度可能差别很大;细分数越大精度越难控制。 真正的细分对驱动器要有相当高的技术要求和工艺要求,成本亦会较高。国内有一些驱动器采用对电机相电流进行“平滑”处理来取代细分,属于“假细分”,“平滑”并不产生微步,会引起电机力矩的下降。真正的细分控制不但不会引起电机力矩的下降,相反,力矩会有所增加。 对实际步距角的作用:在没有细分驱动器时,用户主要靠选择不同相数的步进电机来满足自己对步距角的要求。如果使用细分驱动器,则用户只需在驱动器上改变细分数,就可以大幅度改变实际步距角,步进电机的‘相数’对改变实际步距角的作用几乎可以忽略不计。 深圳市维科特机电有限公司成立于2005年,是步进电机产品的销售、系统集成和应用方案提供商。我们和全球产品性价比高的生产 厂家合作,结合本公司专家团队多年的客户服务经验,给客户提供有 步电机系统解决方案
电机驱动IC UCC3626手册
UCC2626UCC3626 PRELIMINARY FEATURES ?Two Quadrant and Four Quadrant Operation ?Integrated Absolute Value Current Amplifier ?Pulse-by-Pulse and Average Current Sensing ?Accurate, Variable Duty Cycle Tachometer Output ?Trimmed Precision Reference ?Precision Oscillator ?Direction Output Brushless DC Motor Controller BLOCK DIAGRAM DESCRIPTION The UCC3626motor controller IC combines many of the functions re-quired to design a high performance,two or four quadrant,3-phase,brushless DC motor controller into one package.Rotor position inputs are decoded to provide six outputs that control an external power stage.A precision triangle oscillator and latched comparator provide PWM mo-tor control in either voltage or current mode configurations.The oscilla-tor is easily synchronized to an external master clock source via the SYNCH input.Additionally,a QUAD select input configures the chip to modulate either the low side switches only,or both upper and lower switches,allowing the user to minimize switching losses in less de-manding two quadrant applications. The chip includes a differential current sense amplifier and absolute value circuit which provide an accurate reconstruction of motor current,useful for pulse by pulse over current protection as well as closing a current control loop.A precision tachometer is also provided for imple-menting closed loop speed control.The TACH_OUT signal is a variable duty cycle,frequency output which can be used directly for digital con-trol or filtered to provide an analog feedback signal.Other features in-clude COAST,BRAKE,and DIR_IN commands along with a direction output, DIR_OUT.