GPS抗干扰功率倒置阵算法仿真研究
GPS抗干扰功率倒置阵算法仿真研究Ξ
冯 起,袁乃昌
(国防科学技术大学,湖南,长沙,410073)
摘 要:首先介绍了GPS信号的特点和功率倒置阵的特点,说明在GPS抗干扰中功率倒置阵的实用性。在此基础上采用LMS算法计算功率倒置阵的权值并画出
最优加权下的阵的方向图,表明在存在干扰情况下,功率倒置阵能自动在干扰方向形
成方向图零陷,从而达到抑制干扰的目的。
关键词:功率倒置阵;LMS算法;扩频通信
1 GPS信号特点
GPS卫星发射功率有限,由于距离远,信号到
达地面时极其微弱。GPS系统采用伪随机码扩频
通信,其本身具有较高的灵敏度和较强的抗干扰能
力。根据Shannon信道容量公式:
C=W log21+S N
在高斯信道中当传输系统的信噪比S/N下降时,可用增加系统传输带宽W的办法来保持信道容量C不变。对于任意给定的信噪比,可以用增大传输带宽来获得较低的信息差错率。Shannon 又指出,在高斯噪声的干扰下,在限平均功率的信道上,实现有效和可靠通信的最佳信号是具有白噪声统计特性的信号。这是因为高斯白噪声信号具有理想的自相关特性,其自相关函数具有δ(τ)函数的特点。
在GPS接收机中用和发射卫星同步的伪随机码与接收到的信号进行相关处理,由于窄带噪声和其它干扰信号与本地扩频信号不相关,故在相关处理中被削弱,而有用信号因相关运算得到最大的相关峰值,这样就改善了系统输出信噪比。
但扩频通信对于瞄准式窄带干扰和近端强干扰信号对抗性能变差。应用自适应抑制干扰技术能够较好地改善其抗干扰性能。扩频通信中自适应调零天线能较好地抑制瞄准式窄带干扰和多路干扰。
2 功率倒置阵原理
自适应天线系统是由多元天线阵和信息处理器组成的系统。天线工作时,信息处理器根据系统输入和输出自适应调整天线阵权值,自动修正和优化天线的方向图、频率响应和极化特性,抑制和消去干扰提高系统输出信噪比。
扩频通信中,信号电平非常低,地面处GPS信号功率约-160dBW,信号电平还在噪声以下,输入端信噪比约-21dB。对弱信号强干扰的情况,适合采用功率倒置阵抑制干扰。在干扰被大大抑制之后,解扩过程再将信号增强,就能获得很好的信干比。
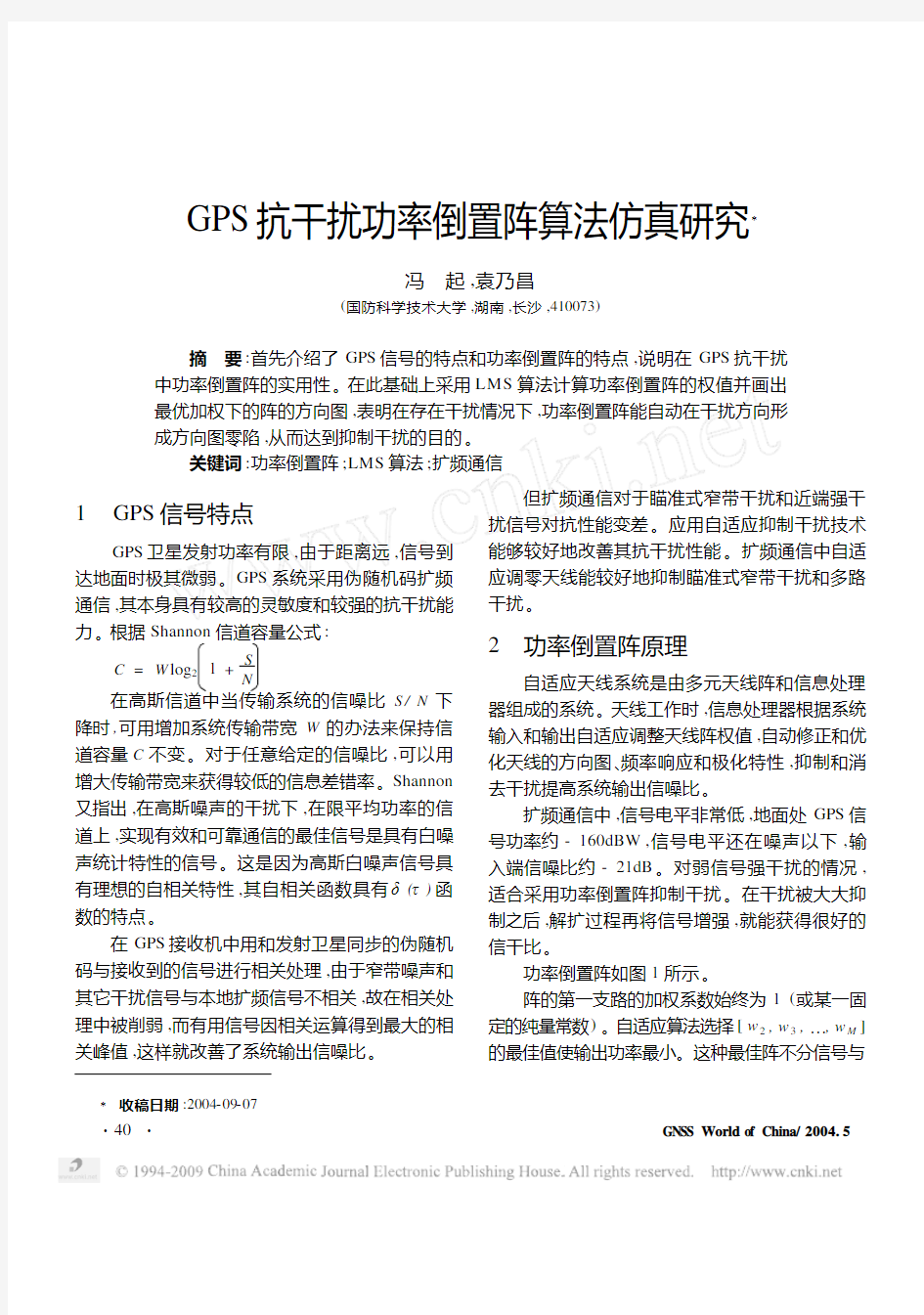
功率倒置阵如图1所示。
阵的第一支路的加权系数始终为1(或某一固定的纯量常数)。自适应算法选择[w2,w3,…,w M]的最佳值使输出功率最小。这种最佳阵不分信号与
Ξ收稿日期:2004209207
图1 功率倒置阵
干扰,只力图使输出功率最小。它的波束图将在干
扰方向引入零点。而且,干扰愈强引入的零点愈深。可以证明,干扰愈强,相应的最佳输出愈小。
功率倒置自适应
阵的最佳权值为W opt =
αR -1x x s 30。
其中,R x x =
E x 3x T ,为阵列输入矢量的相关矩阵,s 0=[1,0,…,0]T ,α为任意常数。
若记x ′=[x 2,…,x M ]T ,φ=E x ′3
x 1,R ′x x =
E x ′?x ′T ,W opt =
w 1W ′opt 。则经过变换可
以得到:R ′x x W ′opt =-w 1φ。
即,如果把第一支路的信号作为需要信号,则功率倒置阵的加权可采用LMS 算法实现权值自适应调整。下面就依据此式,以四元阵为例,用LMS 算法递推计算阵的最佳权值,并画出在最优权值时阵的方向图。
3 仿真计算
因为GPS 信号深埋在噪声之下,而功率倒置阵又是利用各通道之间干扰信号的相关性对消干扰的,所以仿真时忽略有用信号和噪声而只考虑干扰,以更清楚地反映干扰的对消情况。又因为对于GPS 信号的频段(1575.42±1MHz ),假设干扰为带限白噪声,中心频率为ω0=1575.42MHz ,带宽Bi =2MHz ,则两单元间的归一化相关函数为
ρi =[sin (B i T i /2)
/(B i T i /2)]exp (j ω0T i )取天线间距l =1m ,则T i =(l sin θi /c )Φ10-8,sin (B i T i /
2)/(B i T i /2)≈1,有ρi ≈1。所以可以用窄带信号代替干扰而不影响所得结果。下面的仿真采用连续波作为干扰信号,对线阵和两种形式的圆阵递推计算最优加权值,用阵的方向图直观的显示自适应阵达到最佳加权值时的干扰对消的情况,方向图的零点对准干扰的到达方向
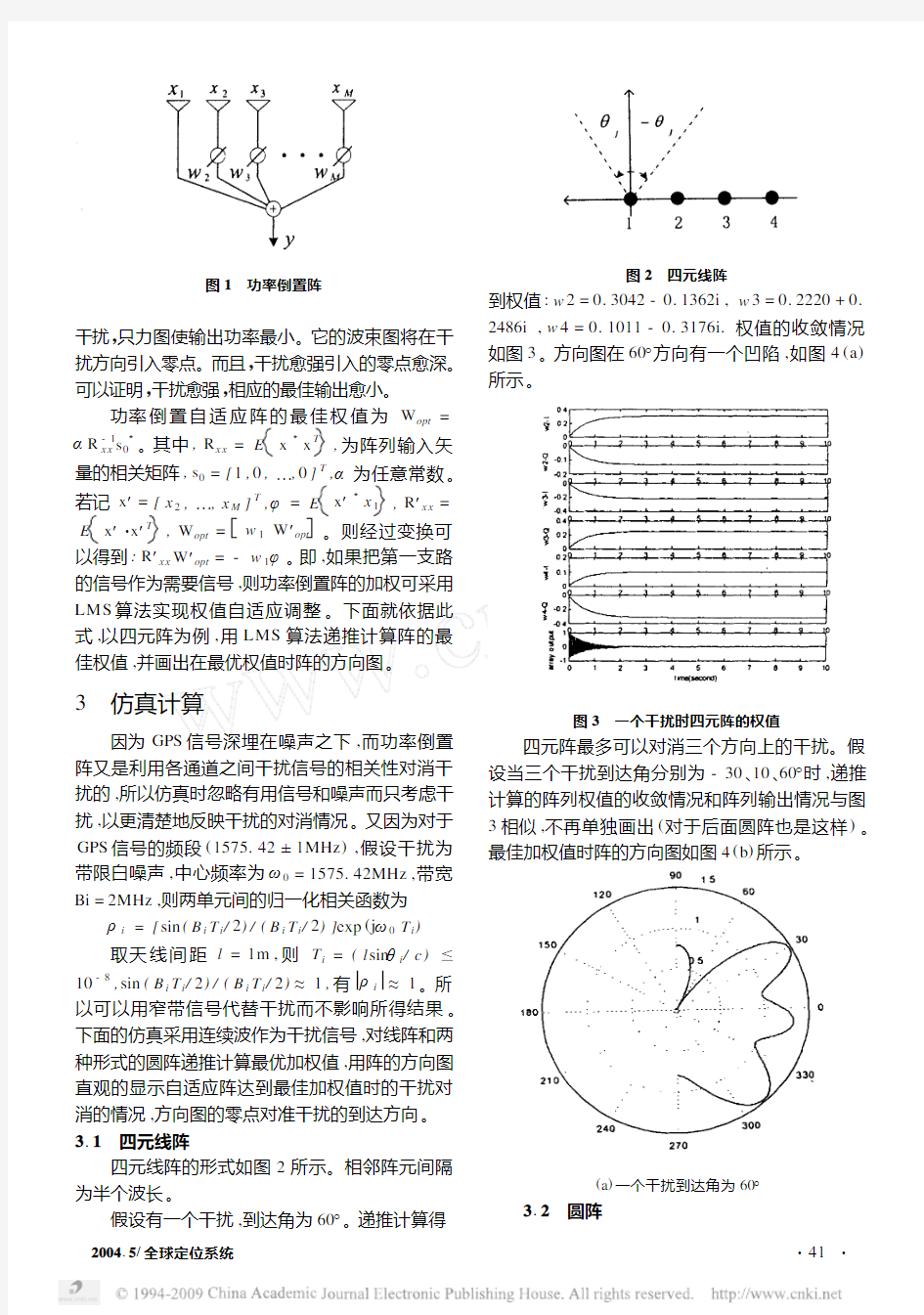
。3.1 四元线阵
四元线阵的形式如图2所示。相邻阵元间隔为半个波长。
假设有一个干扰,到达角为60°。递推计算得
图2 四元线阵
到权值:w 2=0.3042-0.1362i ,w 3=0.2220+0.
2486i ,w 4=0.1011-0.3176i.权值的收敛情况如图3。方向图在60°方向有一个凹陷,如图4(a )所示。
图3 一个干扰时四元阵的权值
四元阵最多可以对消三个方向上的干扰。假
设当三个干扰到达角分别为-30、10、60°时,递推计算的阵列权值的收敛情况和阵列输出情况与图3相似,不再单独画出(对于后面圆阵也是这样)。最佳加权值时阵的方向图如图4(b )所示。
(a )一个干扰到达角为60°
3.2 圆阵
(b )三个干扰到达角
图4
四元线阵的方向图
图5 四元圆阵
第一种形式如图5(a )所示。信号到达方向在
阵所在平面上的投影为一直线,阵元在直线上投影的位置决定了各阵元接收信号的相位关系。为保证在任何方向上阵元的投影间隔不大于半波长,圆阵的半径取三分之一波长
,此时投影最大距离不大于0.48倍波长。以一个干扰信号为例,假设干扰
到达方向为(φ1=30°,θj =60°
)。采用递推算法计算,最优加权时,阵的两个主平面内方向图如图6所示。
圆阵的另一种形式如图5(b )所示
。圆阵的半
径为半个波长,当干扰到达角为(φi =45°,θi =60°)时阵的方向图如图7所示:
图6 干扰到达方向为(φj =30°,θj =60°
)时两个主平面(φi ,φi +90°)内的方向图
图7 干扰到达角为(φi =45°,θi =60°
)时阵的两个主平面(φi ,φi +90°)内的方向图
4 结束语
自适应天线抗干扰技术是卫星导航抗干扰技术研究的重点方向。功率倒置阵对于强的干扰信号,能在干扰到达方向上形成零点,抑制干扰信号提高信噪比,适用于GPS 抗干扰。参考文献
[1] 石镇.自适应天线原理[M ].北京:国防工业出版社,
1991.
[2] 龚耀寰.自适应滤波[M ].北京:电子工业出版社,
1989.
[3] 查光明.扩频通信[M ].西安:西安电子科技大学出版
社,2002.
作者简介:冯起(1980—
),男,河南省南阳市人,国防科技大学电子科学与工程学院硕士生。
Simulation research on the pow er inversion algorithm
based on GPS anti2interference receiving
FENG Q i,YUAN N ai-chang
(N ational U niversity of Def ence Technology,
Changsha Hunan410073,China)
Abstract:It is proved that the power inversion adaptive array is a useful apparatus used in GPS anti-in2 terference receiving system.The algorithm can be used in arrays of different patterns with no change.The re2 sults of the simulation show that the array will automatically generate a null in its direction pattern correspond to the DOA of the interference,and achieve the purpose of anti-interference.
K ey w ords:Power-inversion array;LMS algorithm;spread spectrum communication
(上接第12页)
场的局面,对于以应用为主的我国海洋工程定位市场,项目执行成本会因此降低许多,这是一件好事,但是,我们应该注意到国外的海洋勘探公司,在随着我国加入WTO后,大举进入中国市场,无疑增加了国内海洋勘探部门的竞争对手,我们必须借助伽利略计划,抓住机遇,把我们的技术充分发挥出来,致力于广域差分系统的建设和技术研究,依靠国内的优势,使得我们自己的海洋勘探技术发展壮大,占领国内市场,并进一步增强参与国际海洋工程的竞争力。
4 建议与结论
我国是一个人口众多,国土面积较大的海洋大国,开发利用海洋资源是今后我国经济建设的重点发展方向之一[3]。卫星定位技术作为海洋开发的关键技术,我们必须加以重视,不仅海洋方面,涉及到其他领域的定位应用,在技术开发以及系统建设方面,必须纳入到政府的行为中;着眼于未来,我们需要开发自己的卫星导航系统,目前我国的北斗星导航系统已经投入使用,但是使用范围较小。总之,伽利略系统的出现,对我们开发和利用海洋,提供了新的技术支撑手段,我们的有关科研机构必须抓住机遇,使我国的卫星定位应用技术更进一步,满足我国国民经济建设的需要。
参考文献
[1] 周中谟,易杰军,周琪.《GPS卫星测量原理与应用》
(修订版)[M],测绘出版社
[2] G AL IL EO SA TELL ITE TECHNOLO GY FOR POSI2
TION IN GIN MARITIME EN GIN EERIN G AREA,
D G TEN GEMIUS Contract:1999-AM.0001
[3] 《国家十五“863”计划纲要》
R evie w of G alileo navigation system and its effect of marine engineering
WU Yong2ting,ZH OU Xing2hua,TANG Q iu2hua,DING Ji2sheng,L IU Yan2xiong (The Center f or Ocean M apping and Engineering Research,FIO,S OA S hendong Qingdao266061) Abstract:In this paper,an introduction to G alileo navigation system is presented with its origin,devel2 opment,and the service mode.In view of China marine engineering,the paper gave an analysis of its effect with China marine engineering.
K ey w ord:Satellite navigation and positioning;G alileo navigation system;marine engineering
作者简介:吴永亭 (1969—),男,高级工程师,主要从事海洋精密工程测量的技术研究、开发和服务,以及水下超短基线定位系统的应用和研究。
波束成形
第四章智能天线自适应波束成形算法简介 4.1 引言 智能天线技术作为一种新的空间资源利用技术,自20世纪90年代初由一些学者提出后,近年来在无线通信领域受到了人们的广泛关注。它是在微波技术、自动控制理论、数字信号处理(DSP)技术和软件无线电技术等多学科基础上综合发展而成的一门新技术。智能天线技术从实质上讲是利用不同信号在空间上的差异,对信号进行空间上的处理。与FDMA,TDMA及CDMA相对应,智能天线技术可以认为是一种空分多址SDMA技术,它使通信资源不再局限于时域、频域和码域,而是拓展到了空间域。它能够在相同时隙、相同频率和相同地址码情况下,根据用户信号在空域上的差异来区分不同的用户。智能天线技术与其它通信技术有机相结合,可以增加移动通信系统的容量,改善系统的通信质量,增大系统的覆盖范围以及提供高数据率传输服务等。 4.2 智能天线技术及其优点 智能天线,即具有一定程度智能性的自适应天线阵,自适应天线阵能够在干扰方向未知的情况下,自动调节阵列中各个阵元的信号加权值的大小,使阵列天线方向图的零点对准干扰方向而抑制干扰,增强系统有用信号的检测能力,优化天线方向图,并能有效地跟踪有用信号,抑制和消除干扰及噪声,即使在干扰和信号同频率的情况下,也能成功地抑制干扰。如果天线的阵元数增加,还可以增加零点数来同时抑制不同方向上的几个干扰源。实际干扰抑制的效果,一般可达25--30dB以上。智能天线以多个高增益的动态窄波束分别跟踪多个移动用户,同时抑制来自窄波束以外的干扰信号和噪声,使系统处于最佳的工作状态。 智能天线利用空域自适应滤波原理,依靠阵列信号处理和数字波束形成技术发展起来,它主要包括两个重要组成部分,一是对来自移动台发射的多径电波方向进行到达角(DOA)估计,并进行空间滤波,抑制其它移动台的干扰;二是对基站发送信号进行数字波束形成,使基站发送信号能够沿着移动电波的到达方向发送回移动台,从而降低发射功率,减少对其它移动台的干扰。在普遍采用扩频技术的CDMA系统中,采用智能天线的优势主要体现在以下几个方面: 1) 提高了基站接收机的灵敏度 基站接收到的信号,是来自各天线单元和收信机接收到的信号之和,如果采
单片机软件抗干扰方法
在提高硬件系统抗干扰能力的同时,软件抗干扰以其设计灵活、节省硬件资源、可靠性好越来越受到重视。下面以MCS-51单片机系统为例,对微机系统软件抗干扰方法进行研究。 1 软件抗干扰方法的研究 在工程实践中,软件抗干扰研究的内容主要是:一、消除模拟输入信号的噪声(如数字滤波技术);二、程序运行混乱时使程序重入正轨的方法。本文针对后者提出了几种有效的软件抗干扰方法。 1.1 指令冗余 CPU取指令过程是先取操作码,再取操作数。当PC受干扰出现错误,程序便脱离正常轨道“乱飞”,当乱飞到某双字节指令,若取指令时刻落在操作数上,误将操作数当作操作码,程序将出错。若“飞” 到了三字节指令,出错机率更大。 在关键地方人为插入一些单字节指令,或将有效单字节指令重写称为指令冗余。通常是在双字节指令和三字节指令后插入两个字节以上的NOP。这样即使乱飞程序飞到操作数上,由于空操作指令NOP的存在,避免了后面的指令被当作操作数执行,程序自动纳入正轨。 此外,对系统流向起重要作用的指令如RET、 RETI、LCALL、LJMP、JC等指令之前插入两条NOP,也可将乱飞程序纳入正轨,确保这些重要指令的执行。 1.2 拦截技术 所谓拦截,是指将乱飞的程序引向指定位置,再进行出错处理。通常用软件陷阱来拦截乱飞的程序。因此先要合理设计陷阱,其次要将陷阱安排在适当的位置。
(1 )软件陷阱的设计 当乱飞程序进入非程序区,冗余指令便无法起作用。通过软件陷阱,拦截乱飞程序,将其引向指定位置,再进行出错处理。软件陷阱是指用来将捕获的乱飞程序引向复位入口地址0000H的指令。通常在EPROM中非程序区填入以下指令作为软件陷阱: NOPNOPLJMP 0000H其机器码为0000020000。 (2 )陷阱的安排 通常在程序中未使用的EPROM空间填0000020000。最后一条应填入020000,当乱飞程序落到此区,即可自动入轨。在用户程序区各模块之间的空余单元也可填入陷阱指令。当使用的中断因干扰而开放时,在对应的中断服务程序中设置软件陷阱,能及时捕获错误的中断。如某应用系统虽未用到外部中断1,外部中断1的中断服务程序可为如下形式: NOPNOPRETI返回指令可用“RETI”,也可用“LJMP 0000H”。如果故障诊断程序与系统自恢复程序的设计可靠、完善,用“LJMP 0000H”作返回指令可直接进入故障诊断程序,尽早地处理故障并恢复程序的运行。 考虑到程序存贮器的容量,软件陷阱一般1K空间有2-3个就可以进行有效拦截。 1.3软件“看门狗”技术 若失控的程序进入“死循环”,通常采用“看门狗”技术使程序脱离“死循环”。通过不断检测程序循环运行时间,若发现程序循环时间超过最大循环运行时间,则认为系统陷入“死循环”,需进行出错处理。
基于互补滤波的飞行器姿态解算
基于互补滤波的飞行器姿态解算
————————————————————————————————作者:————————————————————————————————日期: ?
姿态解算 一、主线 姿态表示方式:矩阵表示,轴角表示,欧拉角表示,四元数表示。 惯性测量单元IMU(Inertial Measurement Unit):MPU6050芯片,包含陀螺仪和加速度计,分别测量三轴加速度和三轴角速度。注意,传感器所测数据是原始数据,包含了噪声,无法直接用于飞行器的姿态解算,因此需要对数据进行滤波。 滤波算法:非线性互补滤波算法,卡尔曼滤波算法,Mahony互补滤波算法。 二、知识点补充 加速度计和陀螺仪 加速度计:加速度计,可以测量加速度,包括外力加速度和重力加速度,因此,当被测物体在静止或匀速运动(匀速直线运动)的时候,加速度计仅仅测量的是重力加速度,而重力加速度与R坐标系(绝对坐标系)是固连的,通过这种关系,可以得到加速度计所在平面与地面的角度关系也就是横滚角和俯仰角。把加速度传感器水平静止放在桌子上,它的Z轴输出的是1g的加速度。因为它Z轴方向被重力向下拉出了一个形变。可惜的是,加速度传感器不会区分重力加速度与外力加速度。所以,当系统在三维空间做变速运动时,它的输出就不正确了,或者说它的输出不能表明物体的姿态和运动状态。 陀螺仪:陀螺仪测量角速度。陀螺仪模型如图1所示,陀螺仪的每个通道检测一个轴的旋转。 图1[引自网络] 上图中,Rxz是R在XZ面上的投影,与Z轴的夹角为Axz。Ryz是R在ZY面上的投影,与Z轴的夹角为Ayz。陀螺仪就是测量上面定义角度的变化率,换句话说,它会输出一个与上面这些角度变化率线性相关的值。 加速度计工作原理介绍(摘自网络) 大多数加速度计可归为两类:数字和模拟。数字加速度计可通过I2C,SPI或USART方式获取信息,而模拟加速度计的输出是一个在预定范围内的电压值,你需要用ADC(模拟量转数字量)模块将其转换为数字值。不管使用什么类型的ADC模块,都会得到一个在一定范围内的数值。例如一个10位ADC模块的输出值范围在0-1023间。假设我们从10位ADC模块得到了以下的三个轴的数据: === 586,630,561 AdcRx AdcRy AdcRz
CDMA前向功率控制,反向功率控制
为用于变速率传输的一个功率控制时隙内的时间。在时隙内,功率波动应小于3db,功率电屏应比背景噪声高20db,功率上升和下降的时间应小于6μs。如图1所示。 移动台发射机的平均输出功率应小于-50dbm/1.23MHz,即-110dbm/Hz;移动台发射机背景噪声应小于-60dbm/1.23MHz,即-54dbm/Hz。 1.2IS-95及cdma20001x系统前向及反向功率控制 cdma系统功率控制类型包括: 反向开环功率控制 移动台根据接收功率变化,调整发射功率。 反向闭环功率控制 移动台根据接收到的功率控制比特调整平均输出功率。
前向功率控制 根据移动台测量报告,基站调整对移动台的发射功率。 1.2.1反向开环功率控制 移动台的开环功率控制是指移动台根据接收的基站信号强度来调节移动台发射功率的过程。其目的是使所有移动台到达基站的信号功率相等,以免因“远近效应”影响扩频cdma系统对码分信号的接收,降低系统容量。 1、IS-95A中的开环功率控制 IS-95A系统内,只要手机开机,开环就起作用。移动台根据前向链路信号强度来判断路径损耗。功率变化过程中,只有移动台参与。移动台不知道基站实际的有效发射功率(ERP),只能通过接收到的信号来估计前向链路损耗。移动台通过对接收信号强度的测量,调整发射功率。接收的信号越强,移动台的发射功率越小。 应当指出的是,移动台的开环功率控制的响应时间大约为30ms,只能克服由于阴影效应引起的慢衰落。移动台对接收信号测量和调整是基于认为前向信道和反向信道的衰落特性是一致的,这种依前向信道信号电平来调节移动台发射功率的开环调节是不完善的。需要采用闭环控制加以补充。 移动台在接入过程中的功率控制过程是通过接入探针实现的。接入过程中移动台的发初始发射功率不能太大,会干扰小区内其他用户;同时发射功率也不能
基于噪声子空间的抗干扰算法分析
基于噪声子空间的抗干扰算法分析 摘要:目前,提高导航接收机抗干扰能力主要采用自适应天线阵列处理技术,针对此问题,提出了噪声子空间滤波算法。数值分析结果表明得出基于噪声子空间算法的空域滤波抗干扰性能较好,不受干扰个数、干扰方向的影响。 关键词:噪声子空间抗干扰 1引言 卫星信号的脆弱性使得导航接收设备极易受到人为和自然等干扰而无法正常工作。目前,自适应阵列天线抗干扰技术已相对成熟,但其抗干扰性能却受到参数的限制[1]。文献[2]研究了空时导航抗干扰技术,在采用功率倒置(Power Inversion,PI)约束最优权的基础上引入了反馈定向信息的波束成形算法,该算法提升了约15dB的抗干扰性能。文献[3]提出了跟踪干扰随机特征的归一化功率倒置算法,通过自适应调整循环步长来决定低通滤波器的最优参数,文献[4]的主要研究目标为弱信号干扰,其利用功率倒置算法进行干扰抑制的过程中引入了子空间投影方法,但势必会带来更大的计算复杂度。文献[5]在利用BM3D算法进行图像去噪的过程中采用维纳滤波结构进行降维处理,在保证了图像去噪算法性能最优的基础上简化了计算过程。 本文提出了利用噪声子空间算法进行抗干扰滤波的运算过程,数值分析分别给出了生成数据和实采数据的验证结果,对比了常规算法与噪声子空间算法进行抗干扰滤波的性能。 2噪声子空间滤波算法 设干扰噪声协方差矩阵的特征值分解为 (3-1) 特征值按顺序排列成: ,的P个大特征值对应P个干扰,以对应的P个特征向量为正交基的子空间为干扰子空间,即;另外的N-P个相等的特征值为噪声特征值,对应的特征向量组形成噪声子空间的正交基为。 的逆可用特征值和特征向量表示为 (3-2) 则最优权矢量式为 (3-3) 其中,为一常数。 假设干扰功率远大于噪声功率,由和得 (3-4) 其中,为常数,可见位于噪声子空间,即是噪声特征向量的线性组合。 3数值分析 3.1生成数据验证 生成的干扰信号为单宽带干扰,其俯仰角为5度,信噪比为-21dB,选择第三通道为主通道。干信比为70dB时,信号协方差特征值分解后产生3个干扰特征值1个噪声特征值,即P=3。可选取为噪声特征值对应的特征向量的线性组合,此时空域滤波抗干扰程序对各方向干扰信号的滤除情况如表3-1所示。从表中得出基于噪声子空间算法的空域滤波抗干扰性能较好,不受干扰个数、干扰方向的影响。 表 3-1噪声子空间滤波算法空域滤波情况
干扰处理方法
技术支持 干扰的来源及影响方式 闭路电视监控系统中传输信号的类型主要有两类:一类是模拟视频信号,传输路径由摄象机到矩阵,从矩阵再到显示器或录象机;一类是数字信号包括矩阵与摄象机之间的控制信息传输,矩阵中计算机部分的数字信号。一般设备成为干扰源的可能性很小,因此干扰主要通过信号传输路径进入系统。闭路电视监控系统的信号传输路径是能通过视频电缆和传输控制信号的双绞线耦合进系统的干扰有:各种高频噪声比如大电感负载启停,地电位不等引入的工频干扰,平衡传输线路失衡使抑噪能力下降将共频干扰转成了差模干扰,传输线上阻抗不匹配造成信号的反射使信号传输质量下降,静电放电沿传输线进入设备造成接口芯片损伤或损坏。具体表现如下:由于阻抗不匹配造成的影响在视频图象上表现为重影。在信号传输线上会将在脉冲序列的前后沿形成震荡。震荡的存在使高低电平间的阈值差变小,当震荡的幅值再大或有其他干扰引入时就无法正确分辨出脉冲电平值,导致通信时间变长或通信中断。接地和屏蔽不好会导致传输线抑制外部电磁干扰能力的下降,体现在视频图象就是雪花噪点、网纹干扰以及横纹滚动等;在信号传输线上形成尖峰干扰,造成通信错误。平衡传输线路失衡也会在信号传输线上形成尖峰干扰。静电放电除了会造成设备损坏外,还会影响存储器内的数据,使设备出现些莫名其妙的错误。 抗干扰的方法 从干扰源的分析了解到并没有特别的干扰源,消除或者减少上述干扰的理论探讨也有许多,如何针对闭路电视监控工程解决干扰问题,很少有文献涉及,下面就闭路电视监控工种中常见的干扰及解决方法进行些探讨。 视频信号的干扰 视频信号的干扰在图象上表现为地花点和50HZ横纹滚动,对于雪花点干扰是由于传输线上信号衰减以及耦合了高频干扰所致,这种干扰比较容易消除,在摄象机与控制矩阵之间合理位置增加一个视频放大器,将信号的受噪比提高,或者改变视频电缆的路径避开高频干扰源,高频干扰的问题可基本上得到解决。较难解决的是50HZ横纹滚动及进一步加高频干扰的情况,比如电梯轿厢内摄象机的输出图象。为了抑制上述干扰,首先分析一 下造成上述问题的原因。 摄象机要求的供电电源一般有三种:直流12V、交流24V或220V,大多数工程应用中不从电梯轿厢的供电电源上取,而是另外布设供电电源给摄象机供电,摄象机输出图象经过一条软性的视频电缆从井道的上方
基于互补滤波的飞行器姿态解算
姿态解算 一、主线 姿态表示方式:矩阵表示,轴角表示,欧拉角表示,四元数表示。 惯性测量单元IMU(Inertial Measurement Unit):MPU6050芯片,包含陀螺仪和加速度计,分别测量三轴加速度和三轴角速度。注意,传感器所测数据是原始数据,包含了噪声,无法直接用于飞行器的姿态解算,因此需要对数据进行滤波。 滤波算法:非线性互补滤波算法,卡尔曼滤波算法,Mahony互补滤波算法。 二、知识点补充 加速度计和陀螺仪 加速度计:加速度计,可以测量加速度,包括外力加速度和重力加速度,因此,当被测物体在静止或匀速运动(匀速直线运动)的时候,加速度计仅仅测量的是重力加速度,而重力加速度与R坐标系(绝对坐标系)是固连的,通过这种关系,可以得到加速度计所在平面与地面的角度关系也就是横滚角和俯仰角。把加速度传感器水平静止放在桌子上,它的Z轴输出的是1g的加速度。因为它Z轴方向被重力向下拉出了一个形变。可惜的是,加速度传感器不会区分重力加速度与外力加速度。所以,当系统在三维空间做变速运动时,它的输出就不正确了,或者说它的输出不能表明物体的姿态和运动状态。 陀螺仪:陀螺仪测量角速度。陀螺仪模型如图1所示,陀螺仪的每个通道检测一个轴的旋转。 图1[引自网络] 上图中,Rxz是R在XZ面上的投影,与Z轴的夹角为Axz。Ryz是R在ZY面上的投影,与Z轴的夹角为Ayz。陀螺仪就是测量上面定义角度的变化率,换句话说,它会输出一个与上面这些角度变化率线性相关的值。 加速度计工作原理介绍(摘自网络) 大多数加速度计可归为两类:数字和模拟。数字加速度计可通过I2C,SPI或USART方式获取信息,而模拟加速度计的输出是一个在预定围的电压值,你需要用ADC(模拟量转数字量)模块将其转换为数字值。不管使用什么类型的ADC模块,都会得到一个在一定围的数值。例如一个10位ADC模块的输出值围在0-1023间。假设我们从10位ADC模块得到了以下的三个轴的数据: === 586,630,561 AdcRx AdcRy AdcRz
功率控制
开环功控的目的是提供初始发射功率的粗略估计。它是根据测量结果对路径损耗和干扰水平进行估计,从而计算初始发射功率的过程。比如: 上行链路的开环功控的目的是调整物理随机接入信道的发射功率。UE在发射随机接入之前,总要长时间的测量CPICH的接收功率,以去掉多径衰落的影响。 根据系统消息中的导频功率、RTWP和下行导频实际接受功率来计算Preamble的功率 Preamble逐步抬升功率,直到被网络受到并回复 然后手机对最后一次Preamble功率进行一定修正以后在PRACH上发送RRC Connect Reque st网络收到RRC Conne ct Request消息后根据FA CH功率发送RRC Connect Setup 在该消息中SRNC为通知UE上行链路初始使用PCP(Power Control Preamble) 闭环功率控制的目标是使接收信号的SIR达到预先设定的门限值。在WCDMA中,上行链路和下行链路的闭环功率控制都是 由接收方NODEB 或UE 通过RAKE接收机产生的信号估计DPCH的功率,同时估计当前频段的干扰,产生 SIR估计值,与预先设置的门限相比较。如果估计值大于门限就发出TPC命令“1”(升高功率);如果小于门限就发出TPC命令“0”(降低功率)。接收到TPC命令的一方根据一定的算法决定发射功率的升高或降低。 外环功率控制目的是动态地调整内环功率控制的门限。因为WCDMA系统的内环功率控制是使发射信号的功率到达接收端时保持一定的信干比。然而,在不同的多径环境下,即使平均信干比保持在一定的门限之上,也不一定能满足通信质量的要求(BER或FER或BLER)。因此需要一个外环功率控制机制来动态地调整内环功率控制的门限,使通信质量始终满足要求。RNC或UE的高层通过对信号误码率(BER)或误块率(BLER)的估算,调整快速功率控制中的目标信噪比(SIR tar get),以达到功控的目的。由于这种功控是通过高层参与完成的,所以叫做外环功控。当收到的信号质量变差,即误码率或者误块率上升时,高层就会提高目标信噪比(SIR target)来提高接收信号的质量。常规外环功率控制算法采用与内环功率控制相近似的方式 上行内环功率控制频率为1500次/秒。物理专用控制信道DPCCH采用的无线帧长度为10ms,每帧有15个时隙,每个时隙都有功率控制比特,这样每10ms会对发射功率调整一次,每秒的调整次数为:15次/(10ms/1s)=1500次/秒 外环功控由RNC对基站发送Sir target作为内环功控的参照目标,SIR tar get的改变取决于CRC校验以及Bler tar get(外环功控的参照目标)所以外环工控的最高频率是1/TTI,TTI为10ms时是100。
硬件抗干扰的一些方法
一、下面的一些系统要特别注意抗电磁干扰: 1、微控制器时钟频率特别高,总线周期特别快的系统。 2、系统含有大功率,大电流驱动电路,如产生火花的继电器,大电流开关等。 3、含微弱模拟信号电路以及高精度A/D变换电路的系统。 二、为增加系统的抗电磁干扰能力采取如下措施: 1、选用频率低的微控制器: 选用外时钟频率低的微控制器可以有效降低噪声和提高系统的抗干扰能力。同样频率的方波和正弦波,方波中的高频成份比正弦波多得多。虽然方波的高频成份的波的幅度,比基波小,但频率越高越容易发射出成为噪声源,微控制器产生的最有影响的高频噪声大约是时钟频率的3倍。 2、减小信号传输中的畸变 微控制器主要采用高速CMOS技术制造。信号输入端静态输入电流在1mA左右,输入电容10PF左右,输入阻抗相当高,高速CMOS电路的输出端都有相当的带载能力,即相当大的输出值,将一个门的输出端通过一段很长线引到输入阻抗相当高的输入端,反射问题就很严重,它会引起信号畸变,增加系统噪声。当Tpd>Tr时,就成了一个传输线问题,必须考虑信号反射,阻抗匹配等问题。 信号在印制板上的延迟时间与引线的特性阻抗有关,即与印制线路板材料的介电常数有关。可以粗略地认为,信号在印制板引线的传输速度,约为光速的1/3到1/2之间。微控制器构成的系统中常用逻辑电话元件的Tr(标准延迟时间)为3到×××s之间。 在印制线路板上,信号通过一个7W的电阻和一段25cm长的引线,线上延迟时间大致在4~20ns之间。也就是说,信号在印刷线路上的引线越短越好,最长不宜超过25cm。而且过孔数目也应尽量少,最好不多于2个。 当信号的上升时间快于信号延迟时间,就要按照快电子学处理。此时要考虑传输线的阻抗匹配,对于一块印刷线路板上的集成块之间的信号传输,要避免出现Td>Trd的情况,印刷线路板越大系统的速度就越不能太快。 用以下结论归纳印刷线路板设计的一个规则: 信号在印刷板上传输,其延迟时间不应大于所用器件的标称延迟时间。 3、减小信号线间的交叉干扰: A点一个上升时间为Tr的阶跃信号通过引线AB传向B端。信号在AB线上的延迟时间是
利用ADL5330和AD8318实现闭环自动功率控制设计
利用ADL5330和AD8318实现闭环自动功率控制设计 电路功能与优势 本文所述电路利用一个VGA(ADL5330)和一个对数检波器(AD8318)提供闭环自动功率控制。由于AD8318具有较高的温度稳定性,而且AD8318 RF检波器可确保ADL5330 VGA 的输出端具有同样水平的温度稳定性,因此该电路在整个温度范围都能保持稳定。该电路还增加了对数放大器检波器,用来将ADL5330从开环可变增益放大器转换为闭环输出功率控制电路。AD8318与ADL5330一样,具有线性dB传递函数,因此Pout对设定点传递函数也遵循线性dB特性。 图1:ADL5330与AD8318配合在自动增益控制环路中工作 电路描述 虽然可变增益放大器ADL5330可提供精确的增益控制,但利用一个自动增益控制(AGC)环路也可以实现对输出功率的精密调节。图1显示在AGC环路中工作的ADL5330。增加对数放大器AD8318后,该AGC在较宽的输出功率控制范围具有更高的温度稳定性。ADL5330 VGA要在AGC环路中工作,必须将输出RF的样本反馈至检波器(通常利用一个定向耦合器并增加衰减处理)。DAC将设定点电压施加于检波器的VSET输入,同时将VOUT与ADL5330的GAIN引脚相连。根据检波器的VOUT与RF输入信号之间明确的线性dB关系,检波器调节GAIN引脚的电压(检波器的VOUT引脚为误差放大器输出),直到RF输入的电平与所施加的设定点电压相对应。GAIN建立至某一值,使得检波器的输入信号电平与设定点电压之间达到适当平衡。 AGC环路中工作的ADL5330与AD8318的基本连接如图1所示。AD8318是一款1 MHz 至8 GHz精密解调对数放大器,提供较大的检波范围(60 dB),温度稳定性为±0.5 dB。ADL5330的增益控制引脚受AD8318的输出引脚控制。电压VOUT的范围为0 V至接近VPOS。为避免过驱恢复问题,可以用阻性分压器按比例缩小AD8318的输出电压,以便与ADL5330的0 V至1.4 V增益控制范围接口。
单片机抗干扰方法
如何提高抗干扰性能 搞过产品的朋友都有体会,一个设计看似简单,硬件设计和代码编写很快就搞定,但在调试过程中却或多或少的意外,这些都是抗干扰能力不够的体现。 下面讨论一下如何让你的设计避免走弯路: 抗干扰体现在2个方面,一是硬件设计上,二是软件编写上。 这里重点提醒:在MCU设计中主要抗干扰设计是在硬件上,软件为辅。因为MCU的计算能力有限,所以要在硬件上花大工夫。 看看干扰的途径: 1:干扰信号干扰MCU的主要路径是通过I/O口,一是影响了MCU的数据采集,二是影响内部其它寄存器。 解决方法:后面讨论。 2:电源干扰:MCU虽然适应电压较宽(3-5。5V),但对于电源的波动却很敏感,比如说MCU可以在3V电压下稳定工作,但却不能在电压在3V-5。5V波动的情况下稳定工作。 解决方法:用电源稳压块,做好电源的滤波等工作,提示:一定要在电源旁路并上0。1UF 的瓷片电容来滤除高频干扰,因为电解电容对超过几十KHZ的高频干扰不起作用。 3:上下电干扰:但每个MCU系统在上电时候都要经过这样一个过程,所以要尤其注意。MCU虽然可以在3V电压下稳定工作,但并不是说它不能在3V以下的电压下工作,当然在如此低的电压下MCU是超不稳定状态的。在系统加电时候,系统电源电压是从0V上升到额定电压的,比如当电压到2V时候,MCU开始工作了,但这时是超不稳定的工作,极容易跑飞。 解决方法:1让MCU在电源稳定后才开始工作。PIC在片内集成了POR(内部上电延时复位),这功能一定要在配置位中打开。 外部上电延时复位电路。有多种形式,低成本的就是在复位脚接个阻容电路。高成本的是用专用芯片。这方面的资料特多,到处都可以查找。 最难排除的就是上面第一种干扰,并且干扰信号随时可以发生,干扰信号的强度也不尽相同。但它们也有相同点:干扰信号也遵循欧姆定律,干扰信号偶合路径无非是电磁干扰,一是电火花,二是磁场。 其中干扰最厉害的是电火花干扰,其次是磁场干扰。电火花干扰表现场合主要是附近有大功率开关、继电器、接触器、有刷电机等。磁场干扰表现场合主要是附近有大功率的交流电机、变压器等。 解决方法: 第一点:也是最经典的,就是在PCB步线和元件位置安排上下工夫,这中间学问很多,说几天都说不完^^。 二:综合考虑各I/O口的输入阻抗,采集速率等因素设计I/O口的外围电路。 一般决定一个I/O口的输入阻抗有3种情况: A:I/O口有上拉电阻,上拉电阻值就是I/O口的输入阻抗。 一般大家都用4K-20K电阻做上拉,(PIC的B口内部上拉电阻约20K)。 由于干扰信号也遵循欧姆定律,所以在越存在干扰的场合,选择上拉电阻就要越小,因为干扰信号在电阻上产生的电压就越小。 由于上拉电阻越小就越耗电,所以在家用设计上,上拉电阻一般都是10-20K,而在强干扰场合上拉电阻甚至可以低到1K。 (如果在强干扰场合要抛弃B口上拉功能,一定要用外部上拉。)
闭环温度控制和算法
附录Ⅲ温度控制与PID算法 下面的叙述以波峰焊及回流焊加热温区的温度控制为实例,简单地结合控制理论,以浅显的方式,将温度控制及PID算法作一个简单的描述。 1.温度控制的框图 这是一个典型的闭环控制系统,用于控制加热温区的温度(PV)保持在恒定的温度设定值(SV)。系统通过温度采集单元反馈回来的实时温度信号(PV)获取偏差值(EV),偏差值经过PID调节器运算输出,控制发热管的发热功率,以克服偏差,促使偏差趋近于零。例如,当某一时刻炉内过PCB 板较多,带走的热量较多时,即导致温区温度下降,这时,通过反馈的调节作用,将使温度迅速回升。其调节过程如下: 温度控制的功率输出采用脉宽调制的方法。固态继电器SSR的输出端为脉宽可调的电压UOUT 。当SSR的触发角触发时,电源电压UAN通过SSR的输出端加到发热管的两端;当SSR的触发角没有触发信号时,SSR关断。因此,发热管两端的平均电压为 Ud=(t/T)* UAN=K* UAN 其中K= t/T,为一个周期T中,SSR触发导通的比率,称为负载电压系数或是占空比,K的变化率在0-1之间。一般是周期T固定不便,调节t, 当t在0-T的范围内变化时,发热管的电压即在0-UAN之间变化,这种调节方法称为定频调宽法。下面将要描述的PID调节器的算式在这里的实质即是运算求出一个实时变化的,能够保证加热温区在外界干扰的情况下仍能保持温度在一个较小的范围内变化的合理的负载电压系数K。 第 57 页
2.温度控制的两个阶段 温度控制系统是一个惯性较大的系统,也就是说,当给温区开始加热之后,并不能立即观察得到温区温度的明显上升;同样的,当关闭加热之后,温区的温度仍然有一定程度的上升。另外,热电偶对温度的检测,与实际的温区温度相比较,也存在一定的滞后效应。 这给温度的控制带来了困难。因此,如果在温度检测值(PV)到达设定值时才关断输出,可能因温度的滞后效应而长时间超出设定值,需要较长时间才能回到设定值;如果在温度检测值(PV)未到设定值时即关断输出,则可能因关断较早而导致温度难以达到设定值。为了合理地处理系统响应速度(即加热速度)与系统稳定性之间地矛盾,我们把温度控制分为两个阶段。 第 58 页
LTE中的功率控制总结
LTE中的功率控制总结 1、LTE框图综述 2、LTE功率控制与CDMA系统功率控制技术的比较下表所示。 LTE CDMA 远近效应不明显明显 对抗快衰落 功控目的补偿路径损耗和阴影衰 落 功控周期慢速功控快速功控 功控围小区和小区间小区 具体功率目标上行:每个RE上的能量 整条链路的总发射功率 EPRE;
3、LTE当中上下行分别采用OFDMA和SC-FDMA的多址方式,所以各子载波之间是正交不相关的,这样就克服了WCDMA当中远近效应的影响。为了保证上行发送数据质量,减少归属不同eNodeB 的UE使用相同频率的子载波产生的干扰,同时也减少UE的能量消耗,并使得上行传输适应不同的无线传输环境,包括路损,阴影,快衰落等。(质量平衡与信干噪比平衡的原则相结合使用,是现在功率控制技术的主流。) 4、功率控制方面,只是对上行作功率调整(采用慢速功率控制),下行按照参数配置进行固定功率的发送,即只有eNodeB对UE的发送功率作调整。LTE中,上行功率控制使得对于相同的MCS(Modulation And Coding Scheme), 不同UE到达eNodeB 的功率谱密度(Power Spectral Density,PSD单位带宽上的功率)大致相等。eNodeB 为不同的UE分配不同的发送带宽和调制编码机制MCS,使得不同条件下的UE获得相应不同的上行发射功率。 5、对于下行信号,基站合理的功率分配和相互间的协调能够抑制小区间的干扰,提高同频组网的系统性能。严格来说,LTE的下行方向
是一种功率分配机制,而不是功率控制。不同的物理信道和参考信号之间有不同的功率配比。下行功率分配以开环的方式完成,以控制基站在下行各个子载波上的发射功率。下行RS一般以恒定功率发射。下行共享控制信道PDSCH功率控制的主要目的是补偿路损和慢衰落,保证下行数据链路的传输质量。下行共享信道PDSCH的发射功率是与RS发射功率成一定比例的。它的功率是根据UE反馈的CQI 与目标CQI的对比来调整的,是一个闭环功率控制过程。在基站侧,保存着UE反馈的上行CQI值和发射功率的对应关系表。这样,基站收到什么样的CQI,就知道用多大的发射功率,可达到一定的信噪比(SINR)目标。 下行功率分配以每个RE为单位,控制基站在各个时刻各个子载波上的发射功率。下行功率分配中包括提高导频信号的发射功率,以及与用户调度相结合实现小区间干扰抑制的相关机制。下行在频率上和时间上采用恒定的发射功率。基站通过高层指令指示该恒定发射功率的数值。在接收端,终端通过测量该信号的平均接收功率并与信令指示的该信号的发射功率进行比较,获得大尺度衰落的数值。 下行共享信道PDSCH的发射功率表示为PDSCH RE与CRS RE 的功率比值,即ρA和ρB。其中ρA表示时隙不带有CRS的OFDM 符号上PDSCH RE与CRS RE的功率比值(例如2天线Normal CP的情况下,时隙的第1、2、3、5、6个OFDM符号);ρB 表示时隙带有CRS的OFDM符号上PDSCH RE与CRS RE的功
基于噪声子空间的抗干扰算法分析
基于噪声子空间的抗干扰算法分析 发表时间:2019-09-22T01:13:25.733Z 来源:《基层建设》2019年第19期作者:任婵婵 [导读] 摘要:目前,提高导航接收机抗干扰能力主要采用自适应天线阵列处理技术,针对此问题,提出了噪声子空间滤波算法。 天津航天中为数据系统科技有限公司天津 300450 摘要:目前,提高导航接收机抗干扰能力主要采用自适应天线阵列处理技术,针对此问题,提出了噪声子空间滤波算法。数值分析结果表明得出基于噪声子空间算法的空域滤波抗干扰性能较好,不受干扰个数、干扰方向的影响。 关键词:噪声子空间抗干扰 1引言 卫星信号的脆弱性使得导航接收设备极易受到人为和自然等干扰而无法正常工作。目前,自适应阵列天线抗干扰技术已相对成熟,但其抗干扰性能却受到参数的限制[1]。文献[2]研究了空时导航抗干扰技术,在采用功率倒置(Power Inversion,PI)约束最优权的基础上引入了反馈定向信息的波束成形算法,该算法提升了约15dB的抗干扰性能。文献[3]提出了跟踪干扰随机特征的归一化功率倒置算法,通过自适应调整循环步长来决定低通滤波器的最优参数,文献[4]的主要研究目标为弱信号干扰,其利用功率倒置算法进行干扰抑制的过程中引入了子空间投影方法,但势必会带来更大的计算复杂度。文献[5]在利用BM3D算法进行图像去噪的过程中采用维纳滤波结构进行降维处理,在保证了图像去噪算法性能最优的基础上简化了计算过程。 本文提出了利用噪声子空间算法进行抗干扰滤波的运算过程,数值分析分别给出了生成数据和实采数据的验证结果,对比了常规算法与噪声子空间算法进行抗干扰滤波的性能。 2噪声子空间滤波算法 设干扰噪声协方差矩阵的特征值分解为 (3-1) 特征值按顺序排列成: ,的P个大特征值对应P个干扰,以对应的P个特征向量为正交基的子空间为干扰子空间,即 ;另外的N-P个相等的特征值为噪声特征值,对应的特征向量组形成噪声子空间的正交基为。 的逆可用特征值和特征向量表示为 (3-2) 则最优权矢量式为 (3-3) 其中,为一常数。 假设干扰功率远大于噪声功率,由和得 (3-4) 其中,为常数,可见位于噪声子空间,即是噪声特征向量的线性组合。 3数值分析 3.1生成数据验证 生成的干扰信号为单宽带干扰,其俯仰角为5度,信噪比为-21dB,选择第三通道为主通道。干信比为70dB时,信号协方差特征值分解 后产生3个干扰特征值1个噪声特征值,即P=3。可选取为噪声特征值对应的特征向量的线性组合,此时空域滤波抗干扰程序对各方向干扰信号的滤除情况如表3-1所示。从表中得出基于噪声子空间算法的空域滤波抗干扰性能较好,不受干扰个数、干扰方向的影响。表 3-1噪声子空间滤波算法空域滤波情况 3.2实采数据验证 图3.1为不同方向单宽带干扰经两种算法抗干扰后的相对能量分布,其中绿色的虚线代表经噪声子空间算法滤波后的相对信号能量,其
抗干扰的方法
一、抗干扰方法: 为了使高频电路板的设计更合理,抗干扰性能更好,在进行PCB 设计时应从以下几个方面考虑: 1、合理选择层数:利用中间内层平面作为电源和地线层,可以起到屏蔽的作用,有效降低寄生电感、缩短信号线长度、降低信号间的交叉干扰,一般情况下,四层板比两层板的噪声低20dB。 2、走线方式:走线必须按照45°角拐弯,这样可以减小高频信号的发射和相互之间的耦合。 3、走线长度:走线长度越短越好,两根线并行距离越短越好。 4、过孔数量:过孔数量越少越好。 5、层间布线方向:层间布线方向应该取垂直方向,就是顶层为水平方向,底层为垂直方向,这样可以减小信号间的干扰。 6、敷铜:增加接地的敷铜可以减小信号间的干扰。 7、包地:对重要的信号线进行包地处理,可以显著提高该信号的抗干扰能力,当然还可以对干扰源进行包地处理,使其不能干扰其它信号。 8、信号线:信号走线不能环路,需要按照菊花链方式布线。 9、去耦电容:在集成电路的电源端跨接去耦电容。 10、高频扼流。数字地、模拟地等连接公共地线时要接高频扼流器件,一般是中心孔穿有导线的高频铁氧体磁珠。 二、包地法 抗干扰包地: 电路板设计中抗干扰的措施还可以采取包地的办法,即用接地的导线将某一网络包住,采用接地屏蔽的办法来抵抗外界干扰。 网络包地的使用步骤如下: 1.1、选择需要包地的网络或者导线。从主菜单中执行命令Edit/Select/Net (E+S+N),光标将变成十字形状,移动光标一要进行包 地的网络处单击,选中该网络。如果是组件没有定义网络,可以执行主菜单命令Select/Connected Copper 选中要包地的导 线。 1.2、放置包地导线。从主菜单中执行命令Tools/Outline Selected Objects(T+J)。系统自动对已经选中的网络或导线进行包地操 作。 1.3、对包地导线的删除。如果不再需要包地的导线,可以在主菜单中执行命令Edit/Select/Connected Copper 。此时光标将变成 十字形状,移动光标选中要删除的包地导线,按Delect键即可删除不需要的包地导线。
信号抗干扰解决办法
信号抗干扰解决办法 The Standardization Office was revised on the afternoon of December 13, 2020
解决现场的信号干扰问题 时间:2010-04-24 22:30来源:作者:点击: 17次 生产过程监视和控制中要用到多种自动化仪表、计算机及相应执行机构,过程中的信号既有微弱到毫伏级的小信号,又有数十伏的大信号,而且还有高达数千伏、数百安培的信号要处理。从频率上讲,有直流低频范围的,也有高频/脉冲尖峰。设备、仪表间互扰成为系统调试中必须要解决的问题。除了电磁屏蔽之外,解决各种设备、仪表的“地”,也即信号参考点的电位差,将成为重要课题。因为不同设备、仪表的信号要互传互送,那就存在信号参考点问题。换句话说,要使信号完整传送,理想化的情况是所有设备、仪表中的信号有一个共同的参考点,也即共有一个“地”。进一步讲,所有设备、仪表的信号的参考点之间电位为“零”。但是在实际环境中,这一点几乎是不可及的,这里面除了各个设备、仪表“地”之间连线电阻产生的电压降之外,尚有各种设备、仪表在不同环境受到干扰不同,以及导线接点经受风吹雨淋,导致接点质量下降等诸多因素。致使各个“地”之间有差别。以示意图一为例. 图一 PLC与外接仪表示意图 图一中标明有两个现场设备仪表向PLC传送信号以及PLC向两台现场设备仪表发出信号。假定传送的均为0-10VDC信号。理想情况,PLC及两个现场设备“地”电位完全相等。传送过程中又没有干扰,这样从PLC输入来看,接收正确。但正如前所述,两个现场设备通常有“地”电位差,举例来讲,1#设备“地”与PLC“地”同电位,2#设备比它们的“地”电位高,这样1#设备给PLC的信号为0-10V,而2#设备给PLC的为误差就产生了,同时1#,2#设备的“地”线在PLC汇合联接。将电压施加在PLC地线条上,有可能损坏PLC局部“地”线,同时在显示错误数据,由此引起的问题在现场调试中屡有出现。例如某大型建材公司的生产线调试中,使用美国AB-PLC接国内某厂家手操器。AB-PLC的数据采集板有每八个通道,八个通道共用一个12位A/D,经过变换
LTE中的功率控制总结
LTE中的功率控制总结 LTE框图综述1、 系统功率控制技术的比较下表所示。LTE功率控制与CDMA、2 LTE CDMA 明显不明显远近效应 补偿路径损耗和阴影衰对抗快衰落功控目的落 功控周期慢速功控快速功控 小区功控围小区和小区间 上行:每个RE具体功率目标上的能量整条链路的总发射功率 EPRE; 资料Word
的多址方式,所SC-FDMA当中上下行分别采用OFDMA和3、LTE 当中远近WCDMA以各子载波之间是正交不相关的,这样就克服了eNodeB效应的影响。为了保证上行发送数据质量,减少归属不同的能量消UEUE使用相同频率的子载波产生的干扰,同时也减少的耗,并使得上行传输适应不同的无线传输环境,包括路损,阴影,快(质量平衡与信干噪比平衡的原则相结合使用,是现在功率衰落等。)控制技术的主流。,下采用慢速功率控制)4、功率控制方面,只是对上行作功率调整(的发送对UE行按照参数配置进行固定功率的发送,即只有eNodeB的相于同控制使得对功中调功率作整。LTE,上行率eNodeBUE到达MCS(Modulation And Coding Scheme), 不同单位带宽上的功率)Density,PSD的功率谱密度(Power Spectral 分配不同的发送带宽和调制编码机UEeNodeB 为不同的大致相等。获得相应不同的上行发射功率。,使得不同条件下的制MCSUE、对于下行信号,基站合理的功率分配和相互间的协调能够抑制小5的下行方向LTE区间的干扰,提高同频组网的系统性能。严格来说,资料Word
是一种功率分配机制,而不是功率控制。不同的物理信道和参考信号之间有不同的功率配比。下行功率分配以开环的方式完成,以控制基站在下行各个子载波上的发射功率。下行RS一般以恒定功率发射。下行共享控制信道PDSCH功率控制的主要目的是补偿路损和慢衰落,保证下行数据链路的传输质量。下行共享信道PDSCH的发射功率是与RS发射功率成一定比例的。它的功率是根据UE反馈的CQI与目标CQI的对比来调整的,是一个闭环功率控制过程。在基站侧,保存着UE反馈的上行CQI值和发射功率的对应关系表。这样,基站收到什么样的CQI,就知道用多大的发射功率,可达到一定的信噪比(SINR)目标。 下行功率分配以每个RE为单位,控制基站在各个时刻各个子载波上的发射功率。下行功率分配中包括提高导频信号的发射功率,以及与用户调度相结合实现小区间干扰抑制的相关机制。 下行在频率上和时间上采用恒定的发射功率。基站通过高层指令指示该恒定发射功率的数值。在接收端,终端通过测量该信号的平均接收功率并与信令指示的该信号的发射功率进行比较,获得大尺度衰落的数值。 下行共享信道PDSCH的发射功率表示为PDSCH RE与CRS RE 的功率比值,即ρ和ρ。其中ρ表示时隙不带有CRS的OFDM AAB 符号上PDSCH RE与CRS RE的功率比值(例如2天线Normal CP的情况下,时隙的第1、2、3、5、6个OFDM符号);ρB 表示时隙带有CRS的OFDM符号上PDSCH RE与CRS RE的功
监控摄像机抗干扰的办法
监控摄像机抗干扰的办法 监控系统中干扰图像信号的事情时有发生,当闭路电视监控系统( CCTV)在建筑工程中如果施工过程中未采取恰当的防范措施,各种干扰就会通过传输线缆进入闭路电视监控系统,造成视频图像质量下降、系统控制失灵、运行不稳定等现像。 干扰的来源及影响方式 闭路电视监控系统中传输信号的类型主要有两类:一类是模拟视频信号,传输路径由摄像机到矩阵,从矩阵再到显示器或录像机;一类是数字信号包括矩阵与摄像机之间的控制信息传输,矩阵中计算机部分的数字信号。一般设备成为干扰源的可能性很小,因此干扰主要通过信号传输路径进入系统。闭路电视监控系统的信号传输路径是,能通过视频电缆和传输控制信号的双绞线耦合进系统的干扰有:各种高频噪声比如大电感负载启停,接地电位不等引入的工频干扰,平衡传输线路失衡使抑噪能力下降将共频干扰转成了差模干扰,传输线上阻抗不匹配造成信号的反射使信号传输质量下降,静电放电沿传输线进入设备造成接口芯片损伤或损坏。具体表现如下: 由于阻抗不匹配造成的影响在视频图像上表现为重影。在信号传输线上会将在脉冲序列的前后沿形成震荡。震荡的存在使高低电平间的阈值差变小,当震荡的幅值再大或有其他干扰引入时就无法正确分辨出脉冲电平值,导致通信时间变长或通信中断。接地和屏蔽不好会导致传输线抑制外部电磁干扰能力的下降,体现在视频图像就是雪花噪点、网纹干扰以及横纹滚动等;在信号传输线上形成尖峰干扰,造成通信错误。平衡传输线路失衡也会在信号传输线上形成尖峰干扰。静电放电除了会造成设备损坏外,还会影响存储器内的数据,使设备出现些莫名其妙的错误。 抗干扰的方法 从干扰源的分析了解到并没有特别的干扰源,消除或者减少上述干扰的理论探讨也有许多,如何针对闭路电视监控工程解决干扰问题,很少有文献涉及,下面就闭路电视监控工种中常见的干扰及解决方法进行些探讨。 1 数字信号传输中的抗干扰措施 在弱电系统工程中数字信号的传输通常指长线传输,常见的方式有:通过调制、解调方法在电力线或视频线上传输数字信号;通过工业标准的通信网络进行传输,比如RS422、RS845、RS485;自行开发的自动式传输。三者相较,常见的还是RS422、RS485,因此重点讨论RS485数字通信抗干扰方法。 S485总线是采用差分平衡电气接口,具有较强的抗电磁干扰能力,但在实际工程RS485总线并未达到人们期望的效果。问题往往出现在以下几个方面:第一网络拓扑不合理,未按照总线型网络拓扑布线,成为事宜上的星型拓扑;传输线与接收和发送端设备连接不正确,削弱了平衡线的抗干扰能力;第三公用双绞线,未进一步采取抗干扰措施,比如采用屏蔽双绞线。虽然在造成干扰的方式上有所不同但在干扰的表现形式上只有两种:一种是反射增加了信号畸变程度;一种是外部的干扰由于平衡条件被破坏,共模干扰变成了串模信号进入传输线。 关于信号反射。根据电磁理论,减少长线上信号反射的唯一途径是阻抗匹配,若通信网络拓扑为总线型,阻抗匹配比较容易实现,但若是星型网络拓扑,根据工程经验则可按图1方式进行匹配,在发送端串上与传输线特征阻抗相同的电阻RO,在接收端按图所示进行连接,其中R1>R2,R=(R1* R2)/(R1+R2)=R0。在发送R0一般是驱动门输出内阻的5倍以上,可以得到较高的发送电平,接收的