Activity Recognition Based on Smartphone and Dual-tree Complex Wavelet Transform

Activity Recognition Based on Smartphone and Dual-tree Complex Wavelet
Transform
Chi Wang
Research Institute Electronic Science and Technology University of Electronic Science and Technology of
China
Cheng du, China
wangchiliveevil@https://www.360docs.net/doc/a813643055.html,
Wei Zhang
Research Institute Electronic Science and Technology University of Electronic Science and Technology of
China
Cheng du, China
wzhang@https://www.360docs.net/doc/a813643055.html,
Abstract—Smartphone contains many multiple and powerful sensors, which establishes exciting new opportunities for human-computer interaction and data mining. Those sensors placed inside smartphone are used for phone function enhancement initially. In this work, we show how general machine learning algorithms can use labeled accelerometer data to classify motion activities when users hold a smartphone. First we establish an Android-based data collection application to gain persons’ motion data via accelerometer placed inside smartphone. Then we collect 6 different motion activities from 3 users. Lastly we use normal machine learning algorithm to classify those collected activities. Previous works only use time-domain features for classification. This leads to low accuracy since activity data contains frequency-domain and orientation information. In this paper, we propose a new method for extracting both time-domain and frequency-domain features. We use dual-tree complex wavelet transform (DT-CWT) as feature extraction tool. Then we use general machine learning algorithm tool WEKA for classification. Results show that our method performs better than other researcher’s method which only extracts time-domain feature from accelerometer data in accuracy aspect. Our algorithm acquires accuracy at 86% by using DT-CWT statistical information and orientation feature.
Keywords-component; smartphone; activity recognition; DT-CWT transform
I.I NTRODUCTION
Nowadays, smartphone is used more and more frequently. Smartphone contains diverse and powerful sensors. These sensors include GPS, microphones, cameras, light sensors, compasses, proximity sensors, and accelerometers. Smartphone has qualities of portability, unprecedented computing power, and ability to receive and send data via network, and nearly ubiquitous usage in our modern society, so smartphone establishes an exciting new area for data mining and human-computer interaction [3]. In this situation, the smartphone has evolved from simple computing and communications equipment into a set of portable personal intelligent terminal including computing, perception and communication. With more and more rapid development of context-related services, a variety of new human-computer interaction emerges [10]. In this paper we study application of the accelerometer sensor in smartphone to identify the state of motion activity a person is performing. This research is known as activity recognition.
User activity contains abundant contextual information. User activity reflects the current state and intension of individual motion in a short period of time; in the long term, user activity reflects the diverse characteristics of individual preferences and habits. Therefore, the recognition of user activity is an important foundation to provide personalized service. We achieve our activity recognition by utilizing machine learning algorithms under supervised condition. We collect our accelerometer data from 3 experimenters when they perform daily activity, then transform raw data into examples that can be classified. Each example is labeled with the certain type of activity during data collection stage. And activity recognition task is accomplished by standard machine learning algorithms. We choose Android-based smartphones because Android operating system has advantages of open-source, convenient for programming, and android operating system is the most popular system among smartphone system [9]. Since most smartphones and some music players have equipped tri-axial accelerometer, our research for activity recognition could be applied to other mobile equipment easily.
Accelerometer placed inside smartphones is used to support advanced game play and to enable automatic screen rotation [11]. Furthermore, it can also provide services that develop activity recognition. It’s convenient to get user’s activity data when a user carries smartphone in pocket during daily life [12]. So we can develop applications such as health monitor and fitness trainer. Health monitor can detect person’s seizure of diseases such as cardiovascular disease and hypertension by classifying person’s inappropriate activity [5]. Fitness trainer collects person’s movement information during exercise, and then analyzes person’s exercise indexes such as exercise time, calories expended per hour. Thus, fitness trainer guide person with good advice [2].
Accelerometer-based activity recognition is not new. A great deal of activity recognition applications has been developed. But some researchers use specific accelerometer-based equipment (belt or watch) to record user’s activity data [1]. Smartphone-based activity recognition has some advantages: Smartphone is much cheaper than specific
device, and smartphone can get accelerometer data without disturbing persons’ daily life. Specific accelerometer-based equipment needs to be tied on person’s body (wrist, arms and legs) and this situation results in bad user experience.
There are lots of smartphone-based applications. They only extract time-domain features from acceleration data as classification features. The time-domain features include average, standard deviation, average absolute difference, average resultant acceleration, binned distribution and correlation. Method above is easy to process and time-saving. But these features can’t describe states of motion accurately. In this paper, we propose a novel method to extract both time-domain and frequency-domain features from acceleration data. Results show that our method reaches higher accuracy than method which extracts only time-domain features on equal condition.
II.A CTIVITY R ECOGNITION G OAL
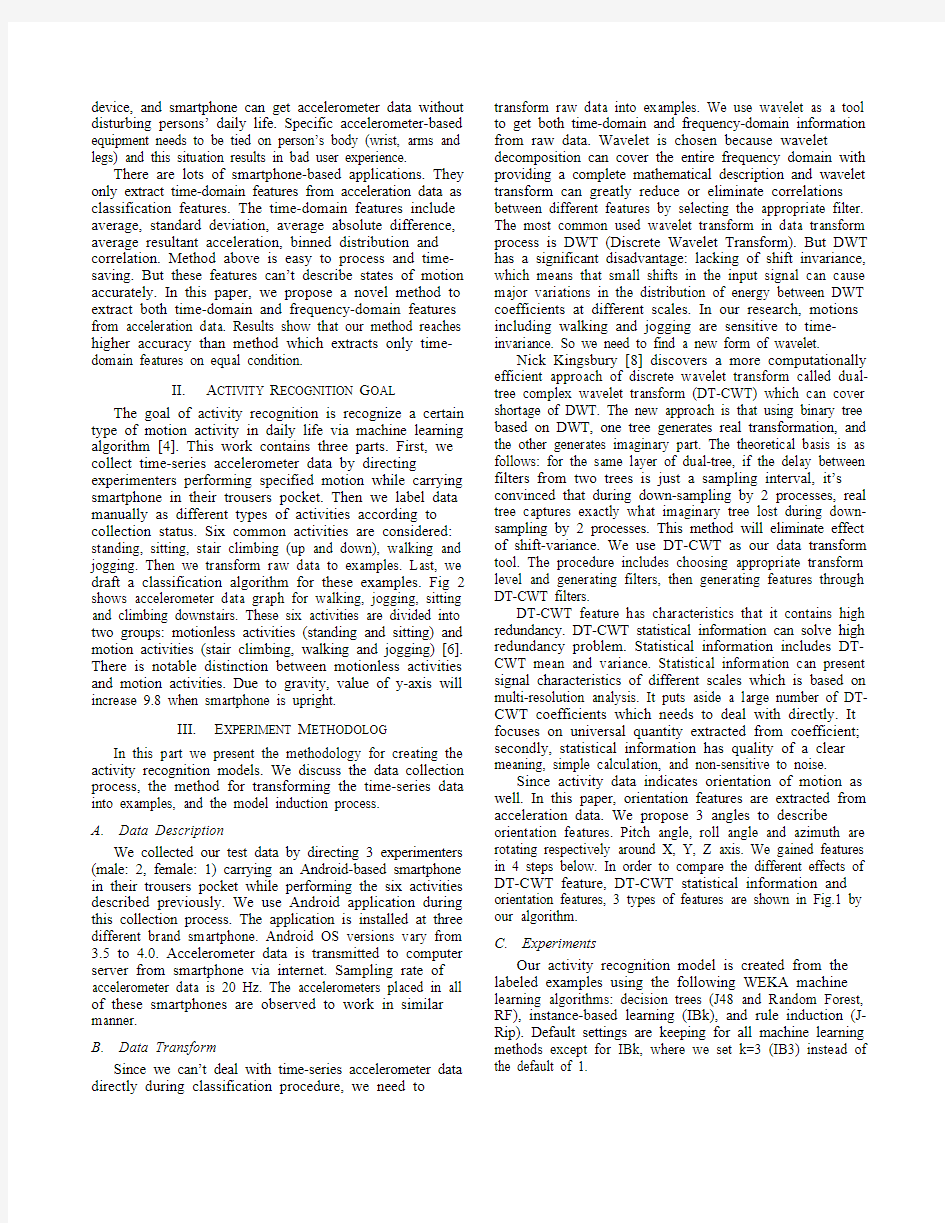
The goal of activity recognition is recognize a certain type of motion activity in daily life via machine learning algorithm [4]. This work contains three parts. First, we collect time-series accelerometer data by directing experimenters performing specified motion while carrying smartphone in their trousers pocket. Then we label data manually as different types of activities according to collection status. Six common activities are considered: standing, sitting, stair climbing (up and down), walking and jogging. Then we transform raw data to examples. Last, we draft a classification algorithm for these examples. Fig 2 shows accelerometer data graph for walking, jogging, sitting and climbing downstairs. These six activities are divided into two groups: motionless activities (standing and sitting) and motion activities (stair climbing, walking and jogging) [6]. There is notable distinction between motionless activities and motion activities. Due to gravity, value of y-axis will increase 9.8 when smartphone is upright.
III.E XPERIMENT M ETHODOLOG
In this part we present the methodology for creating the activity recognition models. We discuss the data collection process, the method for transforming the time-series data into examples, and the model induction process.
A.Data Description
We collected our test data by directing 3 experimenters (male: 2, female: 1) carrying an Android-based smartphone in their trousers pocket while performing the six activities described previously. We use Android application during this collection process. The application is installed at three different brand smartphone. Android OS versions vary from 3.5 to 4.0. Accelerometer data is transmitted to computer server from smartphone via internet. Sampling rate of accelerometer data is 20 Hz. The accelerometers placed in all of these smartphones are observed to work in similar manner.
B.Data Transform
Since we can’t deal with time-series accelerometer data directly during classification procedure, we need to transform raw data into examples. We use wavelet as a tool to get both time-domain and frequency-domain information from raw data. Wavelet is chosen because wavelet decomposition can cover the entire frequency domain with providing a complete mathematical description and wavelet transform can greatly reduce or eliminate correlations between different features by selecting the appropriate filter. The most common used wavelet transform in data transform process is DWT (Discrete Wavelet Transform). But DWT has a significant disadvantage: lacking of shift invariance, which means that small shifts in the input signal can cause major variations in the distribution of energy between DWT coefficients at different scales. In our research, motions including walking and jogging are sensitive to time-invariance. So we need to find a new form of wavelet.
Nick Kingsbury [8] discovers a more computationally efficient approach of discrete wavelet transform called dual-tree complex wavelet transform (DT-CWT) which can cover shortage of DWT. The new approach is that using binary tree based on DWT, one tree generates real transformation, and the other generates imaginary part. The theoretical basis is as follows: for the same layer of dual-tree, if the delay between filters from two trees is just a sampling interval, it’s convinced that during down-sampling by 2 processes, real tree captures exactly what imaginary tree lost during down-sampling by 2 processes. This method will eliminate effect of shift-variance. We use DT-CWT as our data transform tool. The procedure includes choosing appropriate transform level and generating filters, then generating features through DT-CWT filters.
DT-CWT feature has characteristics that it contains high redundancy. DT-CWT statistical information can solve high redundancy problem. Statistical information includes DT-CWT mean and variance. Statistical information can present signal characteristics of different scales which is based on multi-resolution analysis. It puts aside a large number of DT-CWT coefficients which needs to deal with directly. It focuses on universal quantity extracted from coefficient; secondly, statistical information has quality of a clear meaning, simple calculation, and non-sensitive to noise.
Since activity data indicates orientation of motion as well. In this paper, orientation features are extracted from acceleration data. We propose 3 angles to describe orientation features. Pitch angle, roll angle and azimuth are rotating respectively around X, Y, Z axis. We gained features in 4 steps below. In order to compare the different effects of DT-CWT feature, DT-CWT statistical information and orientation features, 3 types of features are shown in Fig.1 by our algorithm.
C.Experiments
Our activity recognition model is created from the labeled examples using the following WEKA machine learning algorithms: decision trees (J48 and Random Forest, RF), instance-based learning (IBk), and rule induction (J-Rip). Default settings are keeping for all machine learning methods except for IBk, where we set k=3 (IB3) instead of the default of 1.
Our machine learning model selects 3 types of feature as input: feature A, feature B, feature C. Feature A is raw coefficient of accelerometer data. Feature B is raw coefficient of accelerometer data and orientation information. Feature C is statistics information of Feature B. We used 10-fold cross validation as our evaluation method. In other words, activity examples in the data set were divided into 10 parts equally and randomly. One part was selected to serve as checkout data, while the remaining 9 parts were used for training the classifier. This procedure was performed 10 times while iterating the test set over the 10 partitions of the
The predictive accuracy for each of the four classification algorithms and different features is shown in Table I. Indication in first three rows is result of separately utilizing F A,F B and F C. Indication in fourth row is outcome by utilizing algorithm proposed by Gary M. Weiss and Jeffrey W. Lockhart in Fordham University. Their data transform method is using time-domain features such as average, standard deviation, average resultant acceleration, time between peaks and binned distribution [7].
Table I Predictive Accuracy of Activity Recognition Performance for
Different Features
Predictive Accuracy for different
features
Classification Algorithm
RF IB3J48J-Rip
F A0.760 0.738 0.674 0.674
F B0.818 0.787 0.742 0.743
F C0.847 0.860 0.812 0.784
Other Algorithm 0.759 0.684 0.691 0.702
Record in first line of Table I shows that random forest algorithm performs better than the other three algorithms when using feature A as input. It also indicates that our result performs better than Gary M. Weiss and Jeffrey W. Lockhart’s method when using random forest and IB3 as classification algorithm. But when using J48 and J-RIP as classification algorithm, our result is worse than Gary M. Weiss and Jeffrey W. Lockhart’s method. Record in second line shows that random forest algorithm performs better than the other three algorithms when using feature B as input. It indicates that our result performs better than Gary M. Weiss and Jeffrey W. Lockhart’s method when using all four classification algorithms as well. Then all accuracies are better than those using feature A as input. Record in second line shows that IB3 algorithm performs better than the other three algorithms when using feature C as input. All accuracies are better than those using feature B as input.
This result implies two pieces of information in the matter of feature selection: accelerometer data can’t be just treated as data flow since orientation information gives rise to better performance. And wavelet statistics information performs better than raw wavelet coefficient. Indication in table II also presents that our data transform algorithm which contains both DT-CWT statistical information and orientation information performs better than Gary M. Weiss and Jeffrey W. Lockhart’s algorithm, which implies that time-domain and frequency-domain features can cover most information in accelerometer data. And only using time-domain features can’t classify users’ motion activity very precisely.
Statistics number also shows that among 4 classification algorithms, random forest performs best when the input feature has high dimension. Because random forest is established with a random way, there are a lot of decision tree in random forest. But there is no correlation between each decision tree in random forest. So the performance of random forest becomes better and better when the number of decision trees increases, in other words, random forest is proper for high dimensional features. When input feature has low dimension, IB3 classification algorithm performs better than the other three algorithms. Because IB3 is instance-
based learning classification algorithm. It means that this kind of learning classification only saves information of train set, and then makes classification decision after all test data samples arrive. The idea of IB3 algorithm is that if a test sample is the most similar to 3 training samples of the same category in the feature space, then this sample belongs to this category mentioned previous. So IB3 algorithm suits for low-dimensional features.
V.C ONCLUSION AND F UTURE W ORK
In this paper we establish and evaluate a feature extraction method and a machine learning approach for achieving activity recognition, in a convenient manner, using only a smartphone placed in user’s pocket. We demonstrate that by using both time-domain and frequency-domain features as training feature, our classification accuracy can achieve a very high score. In this paper, we use DT-CWT wavelet transform to acquire time-domain and frequency-domain features. The results prove that DT-CWT transform can enhance classification performance. In addition, adding orientation information can help raise classification accuracy.
We intend to extend our activity recognition task in several patterns. We plan to add other activities and to utilize additional sensors such as GPS and gyroscope. Since motion activity varies greatly from individual to individual, we consider add another non-accelerative messages to get more precise accuracy. In consideration mentioned above, we tend to add user’s age, gender, body weight and ratio of motion activity’s duration to motionless activity’s duration per day.
R EFERENCES
[1]Fujimoto T, Nakajima H, Tsuchiya N, et al. Wearable human activity
recognition by electrocardiograph and accelerometer[C]//Multiple-
Valued Logic (ISMVL), 2013 IEEE 43rd International Symposium on. IEEE, 2013: 12-17. [2]Boerema S T, van Velsen L, Schaake L, et al. Optimal sensor
placement for measuring physical activity with a 3D
accelerometer[J]. Sensors, 2014, 14(2): 3188-3206.
[3]Anjum A, Ilyas M U. Activity recognition using smartphone
sensors[C]//Consumer Communications and Networking Conference
(CCNC), 2013 IEEE. IEEE, 2013: 914-919.
[4]Dernbach S, Das B, Krishnan N C, et al. Simple and complex activity
recognition through smart phones[C]//Intelligent Environments (IE),
2012 8th International Conference on. IEEE, 2012: 214-221.
[5]Viet V Q, Lee G, Choi D. Fall detection based on movement and
smart phone technology[C]//Computing and Communication
Technologies, Research, Innovation, and Vision for the Future
(RIVF), 2012 IEEE RIVF International Conference on. IEEE, 2012:
1-4.
[6]Weiss G M, Lockhart J W, Pulickal T T, et al. Actitracker: A
Smartphone-based Activity Recognition System for Improving Health
and Well-Being[J]. 2014.
[7]Weiss G M, Lockhart J W. The impact of personalization on
smartphone-based activity recognition[C]//AAAI Workshop on
Activity Context Representation: Techniques and Languages. 2012.
[8]Kingsbury N. Complex wavelets for shift invariant analysis and
filtering of signals[J]. Applied and computational harmonic analysis,
2001, 10(3): 234-253.
[9]Zhang S, McCullagh P, Nugent C, et al. Activity Monitoring Using a
Smart Phone's Accelerometer with Hierarchical Classification[C]//Intelligent Environments (IE), 2010 Sixth
International Conference on. IEEE, 2010: 158-163.
[10]Xiqun C, Xinmiao Y, Qixin S. Traffic Analysis Zone Based Urban
Activity Study with Aggregate Mobile Network Data[C]//Management and Service Science, 2009. MASS'09.
International Conference on. IEEE, 2009: 1-4.
[11]Li M, Wang H, Guo B, et al. Extraction of human social behavior
from mobile phone sensing[M]//Active Media Technology. Springer
Berlin Heidelberg, 2012: 63-72.
[12]McMillan J E R, Glisson W B, Bromby M. Investigating the increase
in mobile phone evidence in criminal activities[C]//System Sciences
(HICSS), 2013 46th Hawaii International Conference on. IEEE, 2013:
4900-4909.
Figure 2 Accelerometer data graph for activities (a) Walking (b) jogging (c) sitting (d) climbing downstairs
S7-200通讯的编程步骤---自由口通讯
PLC 和变频器 频器博客原创(https://www.360docs.net/doc/a813643055.html,)
S7通讯的编程步骤-----自由口通讯 S7-200 通讯的编程步骤---自由口通讯
S7-200 自由口通讯是基于 RS485 通讯基础的半双工通讯, 因此, 发送和接收指令不能同时执行。 自由口通讯使用 SMB30(口 0)和 SMB130(口 1)来定义通讯口 的工作模式。SMB30/SMB130 各位的定义如下:
图 1:通讯口工作模式寄存器
使用自有口通讯,SM30.0 和 SM30.1(SM130.0 和 SM130.1=0) 必须分别为 1 和 0。 发送指令(XMT) 一、 发送指令(XMT) 使用 XMT 发送指令可以把存于缓冲区中的数据, 一次发送一个或
1
PLC 和变频器 频器博客原创(https://www.360docs.net/doc/a813643055.html,)
多个字节的数据,最多为 255 个。发送完最后一个字符后还可以连接 到一个发送完中断(端口 0 为 9,端口 1 位 26,见下表) 。
图 2:中断事件表
2
PLC 和变频器 频器博客原创(https://www.360docs.net/doc/a813643055.html,)
发送缓冲区的格式如下表所示:
图 3:发送缓冲区的格式 说明: T+0:发送信息的字节个数需要提前定义。 T+1~T+255:要发送的数据字节
和 XMT 有关的寄存器:SMB4 的 SM4.5 和 SM4.6。SM4.5=1 时,口 0 发送完毕;SM4.6=1 时,口 1 发送完毕。 由以上可以看出,有两种方法可以检测端口 0 或 1 的数据发送 状态:一种是利用中断,一种是利用寄存器 SMB4 的第 5 位(口 0) 和第 6 位(口 1) 。 接收指令(RCV) 二、 接收指令(RCV) 使用接收指令(RCV)可以从端口 0 或 1 接收一个或多个字节的 数据(最多 255 个) ,并存于数据缓冲区。接收完最后一个字节后可 以连接到一个接收完中断(口 0 是 23,口 1 是 24,见图 2 所示) 。 接收缓冲区的格式如下表所示:
3
机器视觉的现状及其应用
河北工业大学 院系:河北工业大学机械工程学院 班级:机研155班 姓名:翟云飞 学号: 201531204037 题目:机器视觉技术及其应用
目录 1.机器视觉的发展现状 2.机器视觉系统组成 2.1机器视觉系统的工作原理 3.机器视觉的应用 3.1基于机器视觉的FPC嵌入式检测系统检测系统 3.2基于机器视觉的柔性制造岛在线零件识别系统 3.3基于机器视觉的PCB光板缺陷检测技术 3.4新兴行业 4.机器视觉发展趋势 5.中国机器视觉产业的发展现状 5.1、随着产业化的发展对机器视觉的需求将呈上升趋势 5.2、统一开放的标准是机器视觉发展的原动力 5.3、基于嵌入式的产品将取代板卡式产品 5.4、标准化、一体化解决方案也将是机器视觉的必经之路 6.参考文献
1.中国机器视觉的发展趋势 近年来,机器视觉已经发展成为光电子的一个应用分支,广泛应用于微电子、PCB生产、自动驾驶、印刷、科学研究和军事等领域。机器视觉在中国的蓬勃发展,使从事机器视觉的公司和人员大量涌现。首先概述了机器视觉技术的基本原理并分析了机器视觉系统的构建;接着论述了机器视觉技术的当前主要应用领域与情况;最后分析了现阶段机器视觉技术存在的问题。 2.机器视觉系统组成及其工作原理 简言之,机器视觉就是用机器代替人眼来做测量和判断。机器视觉系统是指通过机器视觉产品(即图像摄取装置,分CMOS和CCD两种)将被摄取目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。 从原理上机器视觉系统主要由三部分组成:图像的采集、图像的处理和分析、输出或显示。—个典型的机器视觉系统应该包括光源、光学系统、图像捕捉系统、图像数字化模块、数字图像处理模块、智能判断决策模块和机械控制执行模块,如图1所示。
机器视觉与图像处理方法
图像处理及识别技术在机器人路径规划中的一种应用 摘要:目前,随着计算机和通讯技术的发展,在智能机器人系统中,环境感知与定位、路径规划和运动控制等功能模块趋向于分布式的解决方案。机器人路径规划问题是智能机器人研究中的重要组成部分,路径规划系统可以分为环境信息的感知与识别、路径规划以及机器人的运动控制三部分,这三部分可以并行执行,提高机器人路径规划系统的稳定性和实时性。在感知环节,视觉处理是关键。本文主要对机器人的路径规划研究基于图像识别技术,研究了图像处理及识别技术在路径规划中是如何应用的,机器人将采集到的环境地图信息发送给计算机终端,计算机对图像进行分析处理与识别,将结果反馈给机器人,并给机器人发送任务信息,机器人根据接收到的信息做出相应的操作。 关键词:图像识别;图像处理;机器人;路径规划 ABSTRACT:At present, with the development of computer and communication technology, each module, such as environment sensing, direction deciding, route planning and movement controlling moduel in the system of intelligent robot, is resolved respectively. Robot path planning is an part of intelligent robot study. The path planning system can be divided into three parts: environmental information perception and recognition, path planning and motion controlling. The three parts can be executed in parallel to improve the stability of the robot path planning system. As for environment sensing, vision Proeessing is key faetor. The robot path planning of this paper is based on image recognition technology. The image processing and recognition technology is studied in the path planning is how to apply, Robots will sent collected environment map information to the computer terminal, then computer analysis and recognize those image information. After that computer will feedback the result to the robot and send the task information. The robot will act according to the received information. Keywords: image recognition,image processing, robot,path planning
200的自由口通讯说明
自由口通讯概述 S7-200PLC的通讯口支持RS485接口标准。采用正负两根信号线作为传输线路。 工作模式采用串行半双工形式,在任意时刻只允许由一方发送数据,另一方接收数据。 数据传输采用异步方式,传输的单位是字符,收发双方以预先约定的传输速率,在时钟的作用下,传送这个字符中的每一位。 传输速率可以设置为1200、2400、4800、9600、19200、38400、57600、115200。 字符帧格式为一个起始位、7或8个数据位、一个奇/偶校验位或者无校验位、一个停止位。 字符传输从最低位开始,空闲线高电平、起始位低电平、停止位高电平。字符传输时间取决于波特率。 数据发送可以是连续的也可以是断续的。所谓连续的数据发送,是指在一个字符格式的停止位之后,立即发送下一个字符的起始位,之间没有空闲线时间。而断续的数据发送,是指当一个字符帧发送后,总线维持空闲的状态,新字符起始位可以在任意时刻开始发送,即上一个字符的停止位和下一个字符的起始位之间有空闲线状态。 示例:用PLC连续的发送两个字符(16#55和16#EE)(程序如图3和图4),通过示波器测量CPU通讯端口管脚3/8之间的电压,波形如下图1.: 示例说明: 16进制的16#55换算成2进制等于2#01010101,16进制的16#EE换算成2进制等于2#11101110。如图所示,当数据线上没有字符发送时总线处于空闲状态(高电平),当PLC发送第一个字符16#55时,先发送该字符帧的起始位(低电平),
再发送它的8个数据位,依次从数据位的最低位开始发送(分别为1、0、1、0、1、0、1、0),接着发送校验位(高电平或低电平或无)和停止位(高电平)。因为本例中PLC连续的发送两个字符,所以第一个字符帧的停止位结束后便立即发送下一个字符帧的起始位,之间数据线没有空闲状态。假如PLC断续的发送这两个字符,那么当PLC发送完第一个字符帧的停止位后,数据线将维持一段时间空闲状态,再发送下一个字符帧。 字符传输的时间取决于波特率,如果设置波特率为9.6k,那么传输一个字符帧中的一位用时等于1/9600*1000000=104us,如果这个字符帧有11位,那么这个字符帧的传输时间等于11/9600*1000=1.145ms. 通讯口初始化 SMB30(对于端口0)和SMB130(对于端口1)被用于选择波特率和校验类型。SMB30和SMB130可读可写。见下图2. 图2.特殊存储器字节SMB30/SMB130 示例:定义端口0为自由口模式,9600波特率,8位数据位,偶校验,程序如下图3.:
如何实现S7-200SMART自由口通讯
如何实现S7-200SMART自由口通讯 自由口通讯协议的关键条件 定义开始接收消息和停止接收消息的条件。 1、空闲线检测:设置il=1,sc=0,bk=0,smw90/smw190>0 空闲线条件定义为传输线路上的安静或者空闲的时间。SMW90/SMW190中是以ms为单位的空闲时间。在该方式下,从执行接收指令开始起动空闲时间检测。在传输线空闲的时间大于等于SMW90/SMW190中设定的时间之后接收的第一个字符作为新信息的起始字符。接收消息功能将会忽略在空闲时间到达之前接收到的任何字符,并会在每个字符后面重新启动空闲线定时器。 空闲线时间应大于以指定波特率传送一个字符所需要的时间。空闲线时间的典型为以指定的波特率传送3个字符所需要的时间。传输速率为19200bit/s时候,可设置空闲时间为2ms。 对于二进制协议,没有特定起始字符的协议或指定了消息之间最小时间间隔的协议,可以将空闲线检测用作开始条件。 2、起始字符检测:设置il=0,sc=1,bk=0,忽略smw90/smw190 起始字符是消息的第一个字符,以SMB88/SMB188中的起始字符作为接收到的消息开始的标志。接收消息功能忽略起始字符之前收到的字符,起始字符和起始字符之后收到的所有字符都存储在消息缓冲区中。起始字符检测一般用于ASCII协议。 3、空闲线和起始字符:设置il=1,sc=1,bk=0,SMW90/SMW190大于0 满足空闲线条件之后,接收消息功能查找指定的起始字符。如果接收到的字符不是smB88/smb188指定的起始字符,将开始重新检测空闲线条件。在满足空闲线条件之前接收到的以及起始字符之前接收到的字符都将会被忽略。这种方式尤其适合用于通讯链路上有多台设备的情况。 4 、break检测:设置il=0,sc=0,bk=1,检测smw90/smw190和smb88/smb188 以接收到的break(断开)作为接收消息的开始。当接收到的数据保持为0的时间大于完整字符(包含起始位,数据位,奇偶校验位和停止位)传输的时间,表示检测到break。断开条件之前接收到的字符将忽略,断开条件之后接收到的任意字符都会存储在消息缓冲区中。 5、break和起始字符:il=0,sc=1,bk=1,忽略smw90/smw190 断开条件满足后,接收消息功能将查找指定的起始字符。如果接收到的字符不是起始字符,将重新搜索断开条件。所有在断开条件满足之前在接收到起始字符之前接收的字符都会忽略。起始字符和所有后续字符一起存入消息缓冲区 6、任何字符开始接受:设置il=1,sc=0,bk=0,smw90/smw190=0
基于机器视觉与运动控制的蓝光激光头全自动倾斜调整系统的设计
基于机器视觉与运动控制的蓝光激光头全自动倾斜调整系统的设计 蓝光激光头精细位置调节存有问题,论文为解决上述问题,首先使用机器视觉技术,捕捉到蓝光光斑区域,针对光斑及水平间差距做出分析,在精确且具体的2轴运动控制协助下,达到激光头平面水平放置的效果;紧接着明确光斑焦距,并分析所在区域,考虑到3轴精细运动联动实际情况,找到激光头空间区域,同时还包括焦距所处区域,继而全自动倾斜调整蓝光激光头,改良了蓝光激光头模块产品,达标率超过98%。 【Abstract】There is a problem in blue ray laser head fine position adjustment,to solve the above problem,the paper firstly uses machine vision technology to capture the blue light spot area,analyzes the spot and horizontal gap,it achieved laser head level laying in horizontal placement with the control assistance of accurate and specific 2-axis motion,clear spot focal length,and analyze the area,taking into account the actual situation of 3-axis fine motion linkage,find the laser head space area,also include the area of focal length,then automatically tilt adjust blu-ray laser head,to improve blu-ray laser head module products,the compliance rate is more than 98%. 标签:机器视觉;运动控制;蓝光激光头 1 引言 光碟生产商Singulus2013年9月13日宣称:“用于存储4K内容、容量为100GB的蓝光光碟已经问世”。数字式光盘的优点突出,存储容量大,速度快,且生命周期长,改变了以往包括硬盘及磁带等为存储记录的媒体形式,得到大范围应用。对于信息其是借助光学激光头来开展写入及读出工作的,其中,蓝光光学头构成了高清信息读取不可缺少的部件,其性能所起作用较大,较大程度上影响了光盘存储器性能优劣。在蓝光光学头性能许多调整及检测工作中,尤以倾斜调整检测最为突出,确保了光盘信号的读取无误,国内生产着世界范围内最大量的光盘产品,光盘产业构成了我国信息产业十分必要的环节[1]。上述倾斜调整检查设备的研发商均是外国厂家,成本价格较贵,对国内光盘产业整体发展无益,使得光学头生产企业受制于国外技术设备,所以,考虑到上述情况,进行本次研究,旨在分析基于机器视觉与运动控制的蓝光激光头全自动倾斜调整系统的设计。 2 总体设计基于机器视觉与运动控制的蓝光激光头全自动倾斜调整系统 蓝光激光头全自动倾斜调整系统研发涵盖了多个层面内容,包括CCD机器视觉光斑定位与焦距调节设计及多轴运动控制伺服系统等,这种检测设备具有全自动化且精细的特点[2]。这种系统硬件以机械机构及计算机为主要构成部分,机械机构组成部分包括电机、传感器及气动装置等;计算机处置机器视觉图像,精细化调控多轴运动,且对焊接装置及气动装置实施调控。
外文翻译-利用机器视觉和手的运动控制来提高起重机操作员的性能
利用机器视觉和手的运动控制来提高起重机操作员的性能 摘要所有起重机固有的有效载荷摆动使人工快速,准确,安全的操作有效载荷具有挑战性。防爆起重机控制接口也增加了操作难度。本文介绍了一种新的接口,允许运营商通过移动手持设备(棒或手套)在空间自由驱动起重机。起重机轨道安装了摄像头的手提式的运动装置,它的位置是用来驱动起重机。两个控制体系结构进行了研究。第一个使用一个简单的反馈控制器,第二使用反馈和输入整形器。两个算子的研究表明,手部运动起重机控制要比使用标准按钮悬而未决的控制快速和安全。 指数条款控制接口,起重机,输入整形,机器视觉,振荡。 Ⅰ引言 起重机在维护现代工业经济活力发挥关键作用。他们的重要性表现在造船厂,建筑工地,仓库和材料处理的各种应用。起重机操纵性对于工业生产,低生产成本和工人的安全是一个重要因素。 起重机的固有特性之一有效载荷摆动或更复杂的振荡动力学像自然的倾向双摆,是不利于操作的。已作出重大努力开发控制方案以减少从发出的命令和外部干扰的振动响应。也有在控制起重机包含旋转接头的研究,这由于其非线性动力学的一个额外的水平增加了复杂性。对于运营商而言使用传统的接口,如按钮式起重机吊坠受益于振荡抑制技术。他们产生比没有这样的补偿算子更安全(不与障碍物的碰撞)和更高效的起重机运动(更快的任务完成时间和减少操作按钮)。 2010年9月26日收到手稿; 2011年4月7日修订,2011年6月10日,2012年4月6日和2012年2月9日接受。出版日期2012年6月8日,当前版本的日期2012年10月12日。这项工作是由西门子工业自动化,乔治亚理工学院制造研究中心和波音研究与技术支持。本文推荐副主编E.J.巴斯。
S7-200自由口通讯程序
S7-200自由口通讯程序 MAIN:S7200自由口通讯程序 LD SM0.1 CALL SBR_0:SBR0 //初始化子程序 LD SM0.7 = SM30.0 SBR_0:初始化子程序 LD SM0.0 MOVW +2, VW8 //PLC自由口地址,此处每台机器需设不同的地址 LD SM0.0 MOVB 9, SMB30 //通讯参数,波特率9600,自由口通讯 MOVD &VB100, VD40 MOVW +10, VW54 MOVB 12, VB150 MOVB VB9, VB151 MOVD &VB151, VD60 MOVB 6, SMB34 中断间隔6毫秒 ATCH INT_0:INT0, 10 连接定时中断 ATCH INT_1:INT1, 8 连接字符接收中断 ENI INT_0:中断程序入口定时中断 LD SM0.0 DTCH 10 解除定时中断 MOVD VD40, VD46 VB100的地址送VD46 MOVW +10, VW44 MOVW +10, VW54 ATCH INT_2:INT2, 8 //接收中断起用服务程序INT2 INT_1: 延时转向INT0 LD SM0.0 MOVB 5, SMB34 ATCH INT_0:INT0, 10 INT_2: 接受地址,并判断 LDB= SMB2, VB9 //地址和本机相符 MOVW VW8, AC0 累加器 MOVB 255, SMB34 ATCH INT_3:INT3, 8 //起用中断服务INT3,接受包 ATCH INT_5:INT5, 10 //起用延时监控服务INT5 CRETI LDB= SMB2, VB9 //地址和本机不符 NOT ATCH INT_0:INT0, 10 //返回中断入口
S7-200 SMART PLC 串口通信说明(图文并茂)
S 7-200 S M A R T 串口通信简介 S 7-200 S M A R T 支持的串口通信硬件及连接资源如表 1所示: 注意:1. P P I 模式只支持 S 7-200 S M A R T C P U 与 H M I 设备之间的通信; 2. 通信信号板的工作模式(R S 485/R S 232)是由用户决定的,可以在 M i c r o /W I N S M A R T 中通过设置系统块来设置。 详细设置方法见:如何设置串口通信参数 通信端口定义 1.S 7-200 S M A R T C P U 本体集成 R S 485 端口 (端口 0) 表 2. S 7-200 S M A R T C P U 本体集成 R S 485 端口引脚定义 2.通信信号板 表 1.S 7-200 S M A R T 串口参数 CPU 本体集成通讯口通信信号板(S B C M 01)通讯口类型R S 485 R S 485 R S 232 支持的通信协议 P P I / 自由口 / M O D B U S / U S S 波特率P P I (9600,19200,187500 b /s ) 自由口(1200,115200 b /s )连接资源 每个通信口可连接 4 个 H M I 设备 C P U 插座(9针母头)引脚号信号P o r t 0(端口0)引脚定义 1屏蔽机壳接地 224V 返回逻辑地(24V 公共端)3R S -485信号 B R S -485信号 B 4发送请求R T S (T T L )55V 返回逻辑地(5V 公共端)6+5V +5V ,通过100 O h m 电阻7+24V +24V 8R S -485信号 A R S -485信号 A 9 不用 10位协议选择(输入)金属壳屏蔽 机壳接地 表 3.通信信号板(P o r t 1)引脚定义 通信信号板(S B C M 01) 引脚标记 R S 485 R S 232 机壳接地 机壳接地T X /B R S 485-B R S 232-T x R T S R T S (T T L )R T S (T T L )M 逻辑公共端逻辑公共端R X /A R S 485-A R S 232-R x
机器视觉技术与运动控制技术相结合解析方案
机器视觉技术与运动控制技术相结合解析方案 开发视觉导引运动系统概述 过去几年里,运动控制系统已经把机器视觉作为其关键部分。越来越多的工程师和科研人员认识到当前的机器视觉技术和运动控制技术相结合对于解决复杂应用问题有相当大的帮助。软硬件技术的发展也促进了运动控制和机器视觉系统的结合,并降低了它们的开发难度和开发成本。在设计这种系统时,了解目前的技术发展、方法以及开发工具会对您的工作提供很大的帮助。 当您开发一个视觉导引运动控制系统时,有很多方面需要考虑。其中重要的一点就是如何建立该系统。比如一个视觉导引运动控制系统用于在移动电话上安装机盖,每次电话的位置和方向可能有所不同。为了使问题变得简单,假定移动电话放置在X-Y-Theta工作台来校正位置以及方向。视觉系统用来定位机盖并测量电话移动到正确位置运动系统需要移动的方向和距离。开发这样的系统也有很多的问题必须考虑到,例如视觉单元如何和运动单元关联来保证把部件移动到位。在运动和视觉单元之间建立通信需要校准。如图1所示,在校准一个视觉导引运动控制系统时,需要按照以下几个步骤进行:首先,您需要校正图像系统的所有失真,它们有可能导致错误的测量距离被传递到运动控制系统上; 然后,您需要把图像测量的距离(通常用像素表达)和工作台或电机测量的距离(通常用步进的次数或计数值)联系起来;最后,您需要把运动控制系统与视觉坐标系统相关联,从而校正两个系统的偏移。这种图像测量距离到运动控制距离的转换依赖于很多的参数,其中包括相机和被测物体间的距离以及镜头的类型。相机焦距的改变会使得物体成像的大小有所不同,因此测量的结果也会与相机移动之前有所不同。一个简单的视觉和运动控制系统框图如图1所示。
西门子S7-200自由口通信心得
西门子S7-200 PLC自由口通信学习摘要 本文以s7-200 PLC与智能电表通信为范例(电表波特率为1200bps,偶校验,8位数据位) 一、PLC自由口协议初始化 1、根据智能设备通信时使用的波特率、校验方式、起始位等参数配置PLC自由口,即将上述参数用MOVB指令写入SMB30,SMB30格式如下图所示: 初始化子程序如下:
二、声明中断 发送数据和接收完数据都能链接到中断程序,发送完中断与接收完中断的中断号分别为9和23,中断可在初始化子程序中声明
三、编写自由口要发送的报文子程序 严格按智能设备报文格式,将相应命令,将指令长度(字节)MOV到任意的字节单元,例如vb10。再用MOV_B或MOV_W等指令传送到vb11开始后连续的字节中。 报文子程序
上图为读取电表标识编码为9010(即正向有功总电能)的指令 四、用XMT指令发送报文 XMT指令需指定两个参数,第一个为要发送的报文的起始地址(本例为VB10),第二个为使用的通信口(本例为0口)。可以用定时器控制某一CPU内部触点来控制报文发送的周期。要注意的是,XMT指令必须用上升沿“—|P|—”触发,否则CPU将会报错,CPU将认为有多个XMT/RCV指令同时执行,这是不允许的! 发送报文子程序 五、利用发送完中断启动接收数据指令 当报文用XMT发送完毕,会产生9号中断。我们可以利用中断子程序捕捉相应的中断,并在中断程序中编写相应事件!在步骤1中已经声明了9号中断连接到中断子程序“发送完中断”。因为此我们在“发送完中断”中断子程序中使用RCV指令即可接收到由通信口返回的数据。即将数据送到VB100. “发送完中断”中断子程序
简述机器视觉在自动驾驶中的应用
简述机器视觉在自动驾驶中的应用 机器视觉是人类认知世界最重要的功能手段,生物学研究表明,人类获取外界信息75%依靠视觉系统,而在驾驶环境中这一比例甚至高达90%。 如果能够将人类视觉系统应用到自动驾驶领域,无疑将会大幅度提高自动驾驶的准确性,而这正是当前计算机科学和自动驾驶领域最热门的研究方向之一,它就是机器视觉技术。 机器视觉技术发展至今已有二十多年的历史,而真正发生革命性进步的则是莫尔视觉计算理论的提出,通过实现神经网络相关算法使机器拥有同人类视觉系统同样的功能提供了可能。一般来说,机器视觉系统包含有镜头、摄像系统和图像处理系统,而其核心则是专用高速图像处理单元,也就是把存入的大量数字化信息与模板库信息进行比较处理,并快速得出结论,其运算速度和准确率是关键指标。这主要通过高效合理的算法和处理能力强大的芯片来实现。 目前,市场上已有多种高效视觉专用硬件处理器及芯片等电子器件,并且随着计算机技术的进步,更先进的算法被相继发明,如采用网格分布式处理系统能够有效的提高运算的效率。今后机器视觉的核心问题将是对图像的深入理解。 机器视觉在自动驾驶中的应用主要有以下两个方面: 一、障碍物检测 准确率是车辆自动驾驶过程中安全性的重要保证。在行驶过程中,障碍物的出现是不可预知的,也就无法根据现有的电子地图避开障碍物,只能在车辆行驶过程中及时发现,并加以处理。当前,由于自动驾驶环境的不成熟,关于障碍物的定义尚没有统一的标准。因此,可以认为一切可能妨碍车辆正常行驶的物体和影响车辆通行的异常地形都是车辆行驶过程中的障碍物。目前来看,算法主要有以下三种:1. 基于特征的;2. 基于光流场的;3. 基于立体视觉的。在三种算法中,基于立体视觉的因为既不需要障碍物的先验知识,对障碍物是否运动也无限制,还能直接得到障碍物的实际位置而成为主流研究方向。但其对摄像机标定要求较高。而在车辆行驶过程中,摄像机定标参数会发生漂移,需要对摄像机进行动态标定。 二、道路检测 自动导航是自动驾驶的必要条件,自动驾驶过程中,道路检测主要是为了确定车辆在道路中的位置和方向,以便控制车辆按照正确的路线行驶。另外,它还为后续的确定搜索范围,以及缩小的搜索空间,降低算法复杂度和误识率。然而由于现实中的道路多种多样,在加上光照、气候等各种环境因素的影响,道路检测是一个十分复杂的问题。至今仍无一个通用的算法,现有算法基本上都对道路做了一定的假设。通常采用的假设有:1特定兴趣区域假设;2道路等宽假设;3道路平坦假设。另外,道路平坦假设也为障碍物定义提供参考。
s7-200自由口通信
S7-200 自由口通信 关键字 要点初始化RS485例程发送发送完成接收接收完成起始条件结束条件字符中断 S7-200自由口通信简介 S7-200 CPU的通信口可以设置为自由口模式。选择自由口模式后,用户程序 就可以完全控制通信端口的操作,通信协议也完全受用户程序控制。一般用于 和第三方串行通信设备进行通信。 自由口模式可以灵活应用。Micro/WIN的两个指令库(USS和Modbus RTU) 就是使用自由口模式编程实现的。 在进行自由口通信程序调试时,可以使用PC/PPI电缆(设置到自由口通信 模式)连接PC和CPU,在PC上运行串口调试软件(或者Windows的Hyper Terminal-超级终端)调试自由口程序。 USB/PPI电缆和CP卡不支持自由口调试。 目录 1.1 自由口通信概述 S7-200PLC的通讯口支持RS485接口标准。采用正负两根信号线作为传输线路。 工作模式采用串行半双工形式,在任意时刻只允许由一方发送数据,另一方接 收数据。 数据传输采用异步方式,传输的单位是字符,收发双方以预先约定的传输速率,在时钟的作用下,传送这个字符中的每一位。
传输速率可以设置为1200、2400、4800、9600、19200、38400、57600、115200。 字符帧格式为一个起始位、7或8个数据位、一个奇/偶校验位或者无校验位、一个停止位。 字符传输从最低位开始,空闲线高电平、起始位低电平、停止位高电平。字符传输时间取决于波特率。 数据发送可以是连续的也可以是断续的。所谓连续的数据发送,是指在一个字符格式的停止位之后,立即发送下一个字符的起始位,之间没有空闲线时间。而断续的数据发送,是指当一个字符帧发送后,总线维持空闲的状态,新字符起始位可以在任意时刻开始发送,即上一个字符的停止位和下一个字符的起始位之间有空闲线状态。 示例:用PLC连续的发送两个字符(16#55和16#EE)(程序如图3和图4),通过示波器测量CPU通讯端口管脚3/8之间的电压,波形如下图1.: 图1.两个字符(16#55和16#EE)的波形图 示例说明: 16进制的16#55换算成2进制等于2#01010101,16进制的16#EE换算成2进制等于2#11101110。如图所示,当数据线上没有字符发送时总线处于空闲状态(高电平),当PLC发送第一个字符16#55时,先发送该字符帧的起始位(低电平),再发送它的8个数据位,依次从数据位的最低位开始发送(分别为1、0、1、0、1、0、1、0),接着发送校验位(高电平或低电平或无)和停止位(高电平)。因为本例中PLC连续的发送两个字符,所以第一个字符帧的停止位结束后便立即发送下一个字符帧的起始位,之间数据线没有空闲状态。假如PLC断续的发送这两个字符,那么当PLC发送完第一个字符帧的停止位后,数据线将维持一段时间空闲状态,再发送下一个字符帧。 字符传输的时间取决于波特率,如果设置波特率为9.6k,那么传输一个字符帧中的一位用时等于1/9600*1000000=104us,如果这个字符帧有11位,那么这个字符帧的传输时间等于11/9600*1000=1.145ms. 自由口通信协议是什么? 顾名思义,没有什么标准的自由口协议。用户可以自己规定协议。 已知一个通信对象需要字符(字节)传送格式有两个停止位,S7-200是否支持?
开发视觉导引运动控制系统
开发视觉导引运动控制系统 过去几年里,运动控制系统已经把机器视觉作为其关键部分。越来越多的工程师和科研人员认识到当前的机器视觉技术和运动控制技术相结合对于解决复杂应用问题有相当大的帮助。软硬件技术的发展也促进了运动控制和机器视觉系统的结合,并降低了它们的开发难度和开发成本。在设计这种系统时,了解目前的技术发展、方法以及开发工具会对您的工作提供很大的帮助。 当您开发一个视觉导引运动控制系统时,有很多方面需要考虑。其中重要的一点就是如何建立该系统。比如一个视觉导引运动控制系统用于在移动电话上安装机盖,每次电话的位置和方向可能有所不同。为了使问题变得简单,假定移动电话放置在X-Y-Theta工作台来校正位置以及方向。视觉系统用来定位机盖并测量电话移动到正确位置运动系统需要移动的方向和距离。开发这样的系统也有很多的问题必须考虑到,例如视觉单元如何和运动单元关联来保证把部件移动到位。在运动和视觉单元之间建立通信需要校准。如常见失真的校正 当校正运动控制部分在2维平面上的视觉导引运动控制系统时,应该确保您的相机垂直于该平面或工作台。如果相机不垂直,那么在校准系统时镜头失真也一种误差源。镜头失真来自于镜头边缘的变形。这会导致直线在关联视觉单元和运动控制单元 校准视觉导引运动控制系统可以通过多种方法来实现。最简单的方法是通过实验利用机器视觉和运动控制单元采集到的数据来校准系统。使用这种方法,您可以移动运动控制系统到多个工作点并使用机器视觉系统来测量其运动的的距离。利用所采集到的数据,您可以确定计算出从相机的像素值与工作台运动之间的等式关系,比如说编码器的计数单位。回到移动电话捡取和放置的
西门子PLC 自由口通讯
1.自由口通讯基本概念 1.1 自由口通信概述 1.2 自由口通信要点 1.3 发送和接收指令 2.自由口通信使用指南 2.1 通讯口初始化 2.2 发送数据: 2.3 接收数据 2.4 自由口通信例程 1.自由口通讯基本概念 1.1 自由口通信概述 S7-200PLC的通讯口支持RS485接口标准。采用正负两根信号线作为传输线路。 工作模式采用串行半双工形式,在任意时刻只允许由一方发送数据,另一方接收数据。 数据传输采用异步方式,传输的单位是字符,收发双方以预先约定的传输速率,在时钟的作用下,传送这个字符中的每一位。 传输速率可以设置为1200、2400、4800、9600、19200、38400、57600、115200。 字符帧格式为一个起始位、7或8个数据位、一个奇/偶校验位或者无校验位、一个停止位。 字符传输从最低位开始,空闲线高电平、起始位低电平、停止位高电平。字符传输时间取决于波特率。数据发送可以是连续的也可以是断续的。所谓连续的数据发送,是指在一个字符格式的停止位之后,立即发送下一个字符的起始位,之间没有空闲线时间。而断续的数据发送,是指当一个字符帧发送后,总线维持空闲的状态,新字符起始位可以在任意时刻开始发送,即上一个字符的停止位和下一个字符的起始位之间有空闲线状态。 示例:用PLC连续的发送两个字符(16#55和16#EE)(程序如图3和图4),通过示波器测量CPU通讯端
口管脚3/8之间的电压,波形如下图1.: 图1.两个字符(16#55和16#EE)的波形图 示例说明: 16进制的16#55换算成2进制等于2#01010101,16进制的16#EE换算成2进制等于2#11101110。如图所示,当数据线上没有字符发送时总线处于空闲状态(高电平),当PLC发送第一个字符16#55时, 先发送该字符帧的起始位(低电平),再发送它的8个数据位,依次从数据位的最低位开始发送(分别为1、0、1、0、1、0、1、0),接着发送校验位(高电平或低电平或无)和停止位(高电平)。因为本例 中PLC连续的发送两个字符,所以第一个字符帧的停止位结束后便立即发送下一个字符帧的起始位,之 间数据线没有空闲状态。假如PLC断续的发送这两个字符,那么当PLC发送完第一个字符帧的停止位后,数据线将维持一段时间空闲状态,再发送下一个字符帧。 字符传输的时间取决于波特率,如果设置波特率为9.6k,那么传输一个字符帧中的一位用时等于 1/9600*1000000=104us,如果这个字符帧有11位,那么这个字符帧的传输时间等于 11/9600*1000=1.145ms. 自由口通信协议是什么? 顾名思义,没有什么标准的自由口协议。用户可以自己规定协议。 已知一个通信对象需要字符(字节)传送格式有两个停止位,S7-200是否支持? 字符格式是由最基础的硬件(芯片)决定的;S7-200使用的芯片不支持上述格式。 S7-200是否支持《S7-200系统手册》上列明的通信波特率以外的其他特殊通信速率? 通信速率是由最基础的硬件(芯片)决定的;S7-200使用的芯片不支持没有列明在手册上的通信速率。1.2 自由口通信要点 应用自由口通信首先要把通信口定义为自由口模式,同时设置相应的通信波特率和上述通信格式。用户程 序通过特殊存储器SMB30(对端口0)、SMB130(对端口1)控制通信口的工作模式。 CPU通信口工作在自由口模式时,通信口就不支持其他通信协议(比如PPI),此通信口不能再与编程 软件Micro/WIN通信。CPU停止时,自由口不能工作,Micro/WIN就可以与CPU通信。
机器视觉的十大应用领域
机器视觉的十大应用领域 机器视觉伴随着CCD/CMOS传感技术、计算机技术、嵌入式技术、现场总线技术的发展,机器视觉技术已经逐步发展成为工业自动化生产过程中不可或缺的关键组成子系统。机器视觉系统被应用于各行业的生产设备中,助力行业设备升级,提高产线工艺水平,提升产品的质量和成品率,是现代工业的核心技术之一。机器视觉技术已经被广泛应用于触摸屏、FPD、激光加工、太阳能、半导体、PCB、SMT、机器人与工厂自动化、食品饮料、制药、消费电子产品加工、汽车制造等行业,极大地提高了产品质量、降低生产成本,提升人类对工业产品的物质与精神满足。 触摸屏 随着技术的发展,人们对电子产品交互体验的要求越来越高,触摸屏作为新一代电子产品输入设备正逐步成为平板电脑、手机、电子书、GPS、游戏机等设备的新宠。触摸屏生产工艺复杂,从上游的ITO玻璃镀膜、光刻、IC组件加工,到中游的触摸屏模组贴合、丝网印刷、切割,再到下游的触摸屏模组贴合、盖板玻璃检测,都对工艺提出更高要求,使机器视觉技术成为相关环节生产和质量检测的必要技术。 FPD FPD行业包括LCD、LED、OLED等多种显示设备,各种技术工艺流程都非常复杂,其中LCD 是当前主要的显示技术。FPD行业对生产效率和产品品质有极高的要求,机器视觉技术作为非接触、高精度、高速度的生产、检测能力成为不可或缺的技术手段,从前道的ITO玻璃检测、背光模组检测,到Cell贴合、LCD模组的COG设备、对位贴合、切割机、飞针探测设备等、机器视觉技术的应用提高了设备厂商的核心竞争力。 激光加工 激光加工是一种应用广泛的工业加工技术,利用对激光器的运动控制,实现高精度的打标、切割、雕刻、焊接等功能。随着激光加工的工艺升级,传统技术已经不能满足工业加工对高
西门子S7-200PLC自由口实例代码
1 引言 为了达到和通讯协议已知的控制设备进行数据交换,以提高自动化控制系统的灵活性,很多plc制造商都相继的开发出了方便、灵活的自由口通讯方式,例如三菱公司的fx2系列plc,omron公司的cjm1系列的plc,西门子公司的s7-200系列plc等都提供了自由口通讯模式。自由口通讯是指plc提供了串行的通讯硬件,和用于定制通讯协议的相关指令,在控制系统中,当要和plc连接的控制设备的通讯协议已知时,可以在plc中进行编程定制通讯协议,和控制设备进行数据通讯。本文主要介绍西门子s7-200的自由口和计算机的串口进行的通讯,计算机中采用visual basic进行编程,从而实现计算机与可编程控制器的直接控制。该通讯方式具有效率高、容易实现、通讯硬件简单、容易配置等特点在工业控制领域中被广泛应用。 2 s7-200通讯指令及特殊字节 采用自由口通讯方式时,s7-200上的rs485口完全由用户控制,可以与任何协议已知的设备进行通讯,在这种情况下通讯协议完全由用户制定,为此,s7-200提供了用于进行通讯协议定制的特殊标志位以及相关的通讯指令。 2.1 特殊标志字节 s7-200用于自由口通讯模式定义的特殊标志字节有smb30和smb130,smb30用于s7-200的端口0的通讯,smb130用于s7-200的端口1的通讯,两者的格式一样,下面我们以smb130为例,介绍其组成。smb130各位的含义如下: pp:两位用于选择通讯的校验方式当这两位的组合是: 00无校验01 偶校验10 无校验11 奇校验 d:这一位用于选择通讯的数据位数d=1时7个数据位,d=0时8个数据位 bbb:用于选择自由口通讯是的波特率,这三位的组合和通讯波特率的关系如下: 000 ——38400bps 001 ——19200bps 010 ——9600bps 011 ——4800bps 100 ——2400bps
基于机器视觉的工业机械臂运动控制技术分析 潘铭杰
基于机器视觉的工业机械臂运动控制技术分析潘铭杰 发表时间:2018-05-16T16:37:23.193Z 来源:《基层建设》2018年第2期作者:潘铭杰1 郑建立2 吴庆彪3 [导读] 摘要:在工业生产过程中,为了有效提升工业产业的生产效率,多数工业企业都会在工厂内部安装工业机械臂进行作业,用以提升经济效益。 1.东华大学信息科学和技术学院上海市 201100; 2.上海建桥学院机电学院上海市 201306 摘要:在工业生产过程中,为了有效提升工业产业的生产效率,多数工业企业都会在工厂内部安装工业机械臂进行作业,用以提升经济效益。在这一基础上,作为工业生产管理者,如何加强对工业机械臂运动控制技术的应用水平,就成为工业生产工作顺利推进首要解决的问题。鉴于此,笔者在文中从机器视觉下工业机械臂运动控制技术的研究意义着手,然后分析了工业机械臂视觉控制系统的工作原理,最后从多个方面开展了基于机器视觉的工业机械臂运动控制技术分析,此次研究的目的旨在提升工业作业的生产效率。 关键词:机器视觉;工业机械臂;控制技术 前言: 伴随着社会经济的增长,越来越多的行业中应用到了科学技术手段,其中,工业产业的发展可谓是离不开科学技术的支持。在大部分工业生产工厂中,都会利用到具备一定智能生产技术辅助加工,该种生产方法不仅缩短了作业时间,也有效节省了工业企业自身的成本投入,是为一举两得。基于此,针对机器视觉的工业机械臂运动控制技术分析这一课题进行深入研究具有一定现实意义。 一、机器视觉下工业机械臂运动控制技术的研究意义 由金属或者非金属构件共同组成,通过能源的消耗可以实现做功的工具被称之为机器,其能够有效替代人类体力的劳动,利用能量的转换、信息的快速处理等手段产生有效做功,是机器用于生产的目的,机器视觉主要是指用机器来代替人眼对外界事物进行测量和判断[1]。由于大部分工业生产时传送物品的防止会呈现杂乱无章的状态,传统的离线编程机械臂工作方式无法满足物品归类需求,此时机器视觉工业机械臂的出现,就很好的解决了这一问题,对于工业生产量以及经济效益提升、成本节省都具有重大的意义。 二、工业机械臂视觉控制系统的工作原理 为了能够更好的掌握机器视觉下的工业机械臂运动控制技术,笔者在进行本课题的研究时专门针对该课题制作出了一套比较简易的工业机械臂数据控制系统的工作场景图(见图一)。 图一工业机械臂数据额控制系统的工作场景图 图一中主要构建了工业生产工作的模拟场景,场景中包括一条传送带,在传送带上放置了各项规格够不相同的物体,工业摄像机、光源以及工业机械臂设置在传送带的数值上方,让工业摄像机与机械手臂之间保持固定的水平距离,传送带在正常工作情况下会按照图一中所示的方向进行运动,摄像机与PC视觉系统之间通过数据传输线进行连接。当系统顺利运行时,摄像机会将传送带上的传送物体进行拍照,然后通过数据线传输至PC视觉系统中,通过计算机进行采集图像的观看,然后把传送物体的具体位置、形状等信息发送于机械手臂运动的控制器中,当被传送物体进入到机械手臂的运动范畴中时,机械手臂就会将被传送物体抓取放置制定位置,并做好不同位置的物体放置。 三、基于机器视觉的工业机械臂运动控制技术分析 (一)图像处理技术 一般情况下,由摄像机拍摄到物体进而得出原始图像的过程被称之为图像处理技术。该项技术在应用的过程中会受到周边环境的客观因素影响,尤其是噪声因素的存在,会负面降低图像本身的质量,继而影响图像的后续正常使用。由于图像处理技术的算法十分多样化,所以工业生产管理者在进行工业机械臂运动运动图像处理时,必须按照本工厂所需要的机械臂使用功能进行选择图像处理技术,提升图像处理技术的环境适应性[2]。例如:在进行工业机械臂运动视觉图像处理时,首先需要实施确定区域现场,然后依照不同的区域与生产目标结合进行像素数据的处理,最后是指当图像处理遭遇机械臂控制系统或者是环境的影响时,则需要从低级至高级的顺序开展图像处理原始操作降低影响程度。 (二)工业机械手臂轨迹跟踪技术 在工业生产过程中,工业机械臂是自由度比较多的一项定位设备,也是一种被控对象,能够实现高程度的耦合、完成输入多输出多的一项强非线性机械生产装置。通常情况下,在进行研究工业机械手臂的数学模型研究时,由于受到自身参数值以及外部周边环境的影响,所以会造成机械手臂的数学建模出现一定的误差,进而影响工业机械手臂的正常使用。在此基础上,提升工业机械手臂的应用效率时,就