基于STM32F4的四轴航拍飞行器_论文
题目:基于STM32F4的四轴航拍飞行器
关键词:四旋翼飞行器,STM32F4,捷联式惯导,飞行控制系统,四元数,云台
摘要
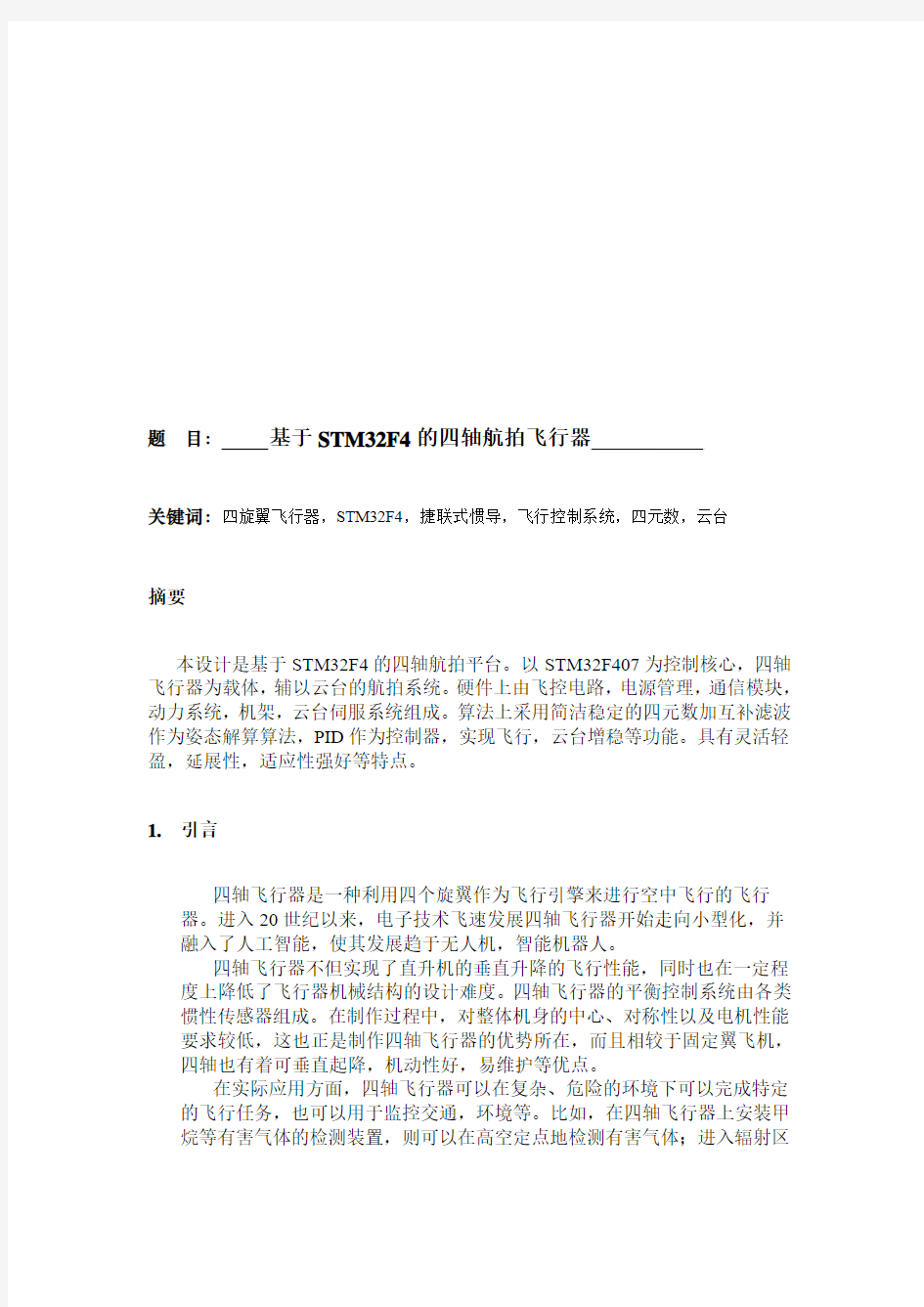
本设计是基于STM32F4的四轴航拍平台。以STM32F407为控制核心,四轴飞行器为载体,辅以云台的航拍系统。硬件上由飞控电路,电源管理,通信模块,动力系统,机架,云台伺服系统组成。算法上采用简洁稳定的四元数加互补滤波作为姿态解算算法,PID作为控制器,实现飞行,云台增稳等功能。具有灵活轻盈,延展性,适应性强好等特点。
1.引言
四轴飞行器是一种利用四个旋翼作为飞行引擎来进行空中飞行的飞行器。进入20世纪以来,电子技术飞速发展四轴飞行器开始走向小型化,并融入了人工智能,使其发展趋于无人机,智能机器人。
四轴飞行器不但实现了直升机的垂直升降的飞行性能,同时也在一定程度上降低了飞行器机械结构的设计难度。四轴飞行器的平衡控制系统由各类惯性传感器组成。在制作过程中,对整体机身的中心、对称性以及电机性能要求较低,这也正是制作四轴飞行器的优势所在,而且相较于固定翼飞机,四轴也有着可垂直起降,机动性好,易维护等优点。
在实际应用方面,四轴飞行器可以在复杂、危险的环境下可以完成特定的飞行任务,也可以用于监控交通,环境等。比如,在四轴飞行器上安装甲烷等有害气体的检测装置,则可以在高空定点地检测有害气体;进入辐射区
轴飞行器毕业设计论文
毕业论文 基于单片机的四轴飞行器 夏纯 吉林建筑大学 2015年6月
毕业论文 基于单片机的四轴飞行器 学生:夏纯 指导教师:许亮 专业:电子信息工程 所在单位:电气与电子信息工程学院答辩日期: 2015 年6月
目录 摘要.......................................................... I ABSTRACT ...................................................... II 第1章绪论. (1) 论文研究背景及意义 (1) 国内外的发展情况 (2) 本文主要研究内容 (4) 第2章总体方案设计 (5) 总体设计原理 (5) 总体设计方案 (5) 系统硬件电路设计方案 (5) 各部分功能作用 (6) 系统软件设计方案 (7) 第3章系统硬件电路设计 (8) Altium Designer Summer 09简介 (8) 总体电路设计 (8) 遥控器总体电路设计 (8) 飞行器总体电路设计 (10) 各部分电路设计 (10) 电源电路设计 (10) 主控单元电路设计 (12)
无线通信模块电路设计 (13) 惯性测量单元电路设计 (16) 电机驱动电路设计 (18) 串口调试电路设计 (19) PCB设计 (21) PCB设计技巧规则 (21) PCB设计步骤 (22)
PCB外形设计 (23) 实物介绍 (25) 第4章系统软件设计 (27) Keil 简介 (27) Keil MDK概述 (27) Keil MDK功能特点 (27) 软件设计框图 (28) 软件调试仿真 (29) 飞控软件设计 (30) MPU6050数据读取 (30) 姿态计算IMU (32) PID电机控制 (32) 结论 (36) 致谢 (38) 参考文献 (39) 附录1 遥控器主程序源代码 (40) 附录2 飞行器主程序源代码 (45) 附录3 遥控器原理图 (50) 附录4 飞行器原理图 (51)
轴飞行器作品说明书
四轴飞行器 作品说明书 摘要 四轴飞行器在各个领域应用广泛。相比其他类型的飞行器,四轴飞行器硬件结构简单紧凑,而软件复杂。本文介绍四轴飞行器的一个实现方案,软件算法,包括加速度计校正、姿态计算和姿态控制三部分。校正加速度计采用最小二乘法。计算姿态采用姿态插值法、需要对比这三种方法然后选出一种来应用。控制姿态采用欧拉角控制或四元数控制。 关键词:四轴飞行器;姿态;控制
目录 1.引言 (1) 2.飞行器的构成? (1) .硬件构成..............................................1? 机械构成 (1) 电气构成 (3) .软件构成 (3) 上位机 (3) 下位机........... . (4) 3.飞行原理........... ................................ (4) . 坐标系统 (4) .姿态的表示 (5) .动力学原理 (5) 4.姿态测量........... ................................ (6) .传感器校正 (6) 加速度计和电子罗盘 (6) 5.姿态控制 (6) .欧拉角控制 (6) .四元数控制 (7) 6.姿态计算 (7) 7.总结 (8) 参考文献 (9)
四轴飞行器最开始是由军方研发的一种新式飞行器。随着MEMS?传感器、单片机、电机和电池技术的发展和普及,四轴飞行器成为航模界的新锐力量。到今天,四轴飞行器已经应用到各个领域,如军事打击、公安追捕、灾害搜救、农林业调查、输电线巡查、广告宣传航拍、航模玩具等。 目前应用广泛的飞行器有:固定翼飞行器和单轴的直升机。与固定翼飞行器相比,四轴飞行器机动性好,动作灵活,可以垂直起飞降落和悬停,缺点是续航时间短得多、飞行速度不快;而与单轴直升机比,四轴飞行器的机械简单,无需尾桨抵消反力矩,成本低?。 本文就小型电动四轴飞行器,介绍四轴飞行器的一种实现方案,讲解四轴飞行器的原理和用到的算法,并对几种姿态算法进行比较。 2.飞行器的构成 四轴飞行器的实现可以分为硬件和软件两部分。比起其他类型的飞行器,四轴飞行器的硬件比较简单,而把系统的复杂性转移到软件上,所以本文的主要内容是软件的实现。? .硬件构成? 飞行器由机架、电机、螺旋桨和控制电路构成。 机械构成? 机架呈十字状,是固定其他部件的平台,本项目采用的是碳纤维材料的机架。电机采用无刷直流电机,固定在机架的四个端点上,而螺旋桨固定在电机转子上,迎风面垂直向下。螺旋桨按旋转方向分正桨和反桨,从迎风面看逆时针转的为正桨,四个桨的中心连成的正方形,正桨反桨交错安装。 CA D设计机架如图: 整体如图2-1: 电气构成 电气部分包括:控制电路板、电子调速器、电池,和一些外接的通讯、传感器模块。控制电路板是电气部分的核心,上面包含MCU、陀螺仪、加速度计、电子罗盘、气压计等芯片,负责计算姿态、处理通信命令和输出控制信号到电子调速器。电子调速器简称电调,用于控制无刷直流电机。 电气连接如图2-2所示。 .软件构成
四旋翼飞行器论文(原理图 程序)..
四旋翼自主飞行器(B题) 摘要 系统以R5F100LE作为四旋翼自主飞行器控制的核心,由电源模块、电机调速控制模块、传感器检测模块、飞行器控制模块等构成。飞行控制模块包括角度传感器、陀螺仪,传感器检测模块包括红外障碍传感器、超声波测距模块、TLS1401-LF模块,瑞萨MCU综合飞行器模块和传感器检测模块的信息,通过控制4个直流无刷电机转速来实现飞行器的欠驱动系统飞行。在动力学模型的基础上,将小型四旋翼飞行器实时控制算法分为两个PID控制回路,即位置控制回路和姿态控制回路。测试结果表明系统可通过各个模块的配合实现对电机的精确控制,具有平均速度快、定位误差小、运行较为稳定等特点。
目录 1 系统方案论证与控制方案的选择............................................................................................. - 2 - 1.1 地面黑线检测传感器............................................................................................................. - 2 - 1.2 电机的选择与论证................................................................................................................. - 2 - 1.3 电机驱动方案的选择与论证................................................................................................. - 3 - 2 四旋翼自主飞行器控制算法设计............................................................................................. - 3 - 2.1 四旋翼飞行器动力学模型..................................................................................................... - 3 - 2.2 PID控制算法结构分析.......................................................................................................... - 3 - 3 硬件电路设计与实现................................................................................................................. - 5 - 3.1飞行控制电路设计.................................................................................................................. - 5 - 3.2 电源模块................................................................................................................................. - 6 - 3.3 电机驱动模块......................................................................................................................... - 6 - 3.4 传感器检测模块..................................................................................................................... - 7 - 4 系统的程序设计......................................................................................................................... - 8 - 5 测试与结果分析......................................................................................................................... - 9 - 5.1 测试设备................................................................................................................................. - 9 - 5.2 测试结果................................................................................................................................. - 9 - 6 总结........................................................................................................................................... - 10 - 附录A 部分程序清单.................................................................................................................. - 11 -
四轴飞行器制作过程
DIY四轴飞行器制作过程,超清晰多图!!!本人是航模菜鸟,大概是去年11月份,迷上了四轴飞行器,经常上MK的网站看飞行录相,四轴飞行起来稳定性真好,简直是酷毙了。最终没能抵制住诱惑,冲动之下决定自已也做个来玩玩。从网上收集资料,一切从0起步。经历了几个月的走走停停,现在已陆续完成了无刷电调、四轴机架、遥控器多通道改造、IMU 模块、飞控板设计制作。现小有成果,公布出来和大家交流交流,以资进步由于水平所限,本人只熟悉和使用51架构的MCU,系统的所有模块都是架构在C8051F 的基础上。但四轴所涉及的原理、控制理论都是一样的原理,希望各位同好网友不吝赐教,多多指导,谢谢!!! 1.从旧货摊买的两个硬盘.JPG (94.34 KB) 2009-7-13 00:06
2.费了九牛二虎之力,最后改造一个拆手机用的起子,搞定了.JPG (91.37 KB) 2009-7-13 00:06 先贴两个图试试能否成功,下面接着来。机架打算用现有的电直尾管和管座配上硬盘片构成,电机用新西达2212 KV930,两正两反的桨用口碑不错的德国EPP1045 。
3.固定电直尾管的座子,好贵呀.JPG (103.48 KB) 2009-7-13 00:10
4.固定电直尾管的座子,好贵呀.JPG (103.48 KB) 2009-7-13 00:10
5.和到手的电机、尾管合张照.JPG (9 6.75 KB) 2009-7-13 00:10
6.外加工的4个电机安装座.JPG (73.54 KB) 2009-7-13 00:10
四轴飞行器电机控制模块设计
四轴飞行器电机控制模块设计
密级: NANCHANG UNIVERSITY 学士学位论文THESIS OF BACHELOR (2011—2015年) 题目四轴飞行器电机控制模块设计 学院:信息工程学院系自动化系专业班级:测控技术与仪器111班学生姓名:吕晴学号:5801211011 指导教师:张宇职称:讲师起讫日期:2015-3-5 ~ 2015-6-2
南昌大学 学士学位论文原创性申明 本人郑重申明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果。对本文的研究作出重要贡献的个人和集体,均已在文中以明确方式表明。本人完全意识到本申明的法律后果由本人承担。 作者签名:日期: 学位论文版权使用授权书 本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权南昌大学可以将本论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。 保密□,在年解密后适用本授权书。 本学位论文属于 不保密□。 (请在以上相应方框内打“√”) 作者签名:日期: 导师签名:日期:
摘要 四轴飞行器电机控制模块设计 专业: 测控技术与仪器学号: 58012110011 学生姓名:吕晴指导老师:张宇 摘要 本课题是针对四轴飞行器在已经获得传感器测得的精确数据的情况下,设计合理的电路和算法,实现四轴飞行器稳定飞行和各种姿态变换。本课题的主要内容是对四轴飞行器的电机控制模块进行软硬件设计。 四轴飞行器是智能机器人的一种,它是由四个旋翼旋转产生升力,通过协调各旋翼的转速来实现飞行器的姿态控制。与传统的无人机相比,四轴飞行器具有很强的机动灵活性和载荷能力,特别适合在理想稳态或者准稳态的飞行条件下进行全方位垂直起降,在军事和民用领域均拥有广阔的发展前景[2]。 本论文对四轴飞行器的电机控制模块进行了调研,并设计出了相关的硬件电路板以及软件控制算法。具体内容如下: 首先建立四轴飞行器的动力学模型,四轴飞行器的动力学建模分为力学建模和运动学建模两个部分,总体思想是将四轴飞行器看作一个刚体,选定当前的姿态角和目标姿态为输入量,在理想的条件下,推导出控制四轴飞行器所需的四个电机的控制量作为输出量的方程,即建立四轴飞行器受力与姿态之间的关系。 其次对四轴飞行器电机控制模块进行合理的硬件设计,硬件部分分为了电源模块、主控模块、电机驱动模块、检测模块、无线通讯模块五个模块。其中选择了STM32系列单片机作为主控模块的微处理器,选择了三相无刷直流电机作为动力源,无刷电调对其进行调速。 再次设计合理的控制算法,本课题采用了经典PID算法,临界比例度法对PID参数进行了初步整定,再在试验中对参数进行微调。 最后针对四轴飞行器电机控制模块设计了合理的软件流程。 关键词:四轴飞行器;动力学模型;电机;PID控制算法
四轴飞行器结题报告
学校名称: 队长姓名: 队员姓名: 指导教师姓名:2013年9月6日
摘要 本次比赛我们需要很好地控制飞行器,让它自主完成比赛应该完成的任务。 本文的工作主要针对微型四旋翼无人飞行器控制系统的设计与实现问题展开。首先制作微型四旋翼无人飞行器实验平台,其次设计姿态检测算法,然后建立数学模型并设计姿态控制器和位置控制器,最后通过实验对本文设计的姿态控制器进行验证。设计机型设计全部由小组成员设计并制作,部分元件从网上购得,运用RL78/G13作为主控芯片,自行设计算法对飞行器进行,升降,俯仰,横滚,偏航等姿态控制。并可以自行起飞实现无人控制的自主四轴飞行器。 关键字:四旋翼无人飞行器、姿态控制、位置控制
目录 第1章设计任务.................................................................................... 错误!未定义书签。 1.1 研究背景与目的........................................................................ 错误!未定义书签。 1.2 .................................................................................................... 错误!未定义书签。 1.3...................................................................................................... 错误!未定义书签。第2章方案论证.................................................................................... 错误!未定义书签。 2.1...................................................................................................... 错误!未定义书签。 .................................................................................................... 错误!未定义书签。 .................................................................................................... 错误!未定义书签。 2.2 ........................................................................................................... 错误!未定义书签。第3章理论分析与计算........................................................................ 错误!未定义书签。 ........................................................................................................... 错误!未定义书签。第4章测试结果与误差分析................................................................ 错误!未定义书签。 4.1...................................................................................................... 错误!未定义书签。 4.2...................................................................................................... 错误!未定义书签。 4.3...................................................................................................... 错误!未定义书签。 4.4 .................................................................................................... 错误!未定义书签。 ........................................................................................................... 错误!未定义书签。第5章结论心得体会............................................................................ 错误!未定义书签。 5.1 .................................................................................................................. 错误!未定义书签。.................................................................................................................. 错误!未定义书签。 2设计任务: 基本要求 (1)四旋翼自主飞行器(下简称飞行器摆放在图1所示的A区,一键式
四旋翼无人机毕业设计
渤海大学本科毕业论文(设计)四旋翼无人机设计与制作 The Manufacture and Design of Quad Rotor Unmanned Aerial Vehicle 学院(系): 专业: 学号: 学生姓名: 入学年度: 指导教师: 完成日期:
摘要 四旋翼无人机飞行器因为它的结构简单,而且控制起来也很方便,因此它成为了近几年来发展起来的热门产业。在这里本文详细的介绍了四旋翼飞行器的设计和制作的过程,其中包括了四旋翼无人机飞行器的飞行原理,硬件的介绍和选型,姿态参考算法的推导和实现,系统软件的具体实现。该四旋翼飞行器控制系统以STM32f103zet 单片机为核心,根据各个传感器的特点,采用不同的校正方法对各个传感器数据进行校正以及低通数字滤波处理,之后设计了互补滤波器对姿态进行最优估计,实现精确的姿态测量。最后结合GPS控制与姿态控制叠加进行PID控制四旋翼飞行器的四个电机,来达到实现各种飞行动作的目的。在制作四旋翼飞行器的过程中,进行了大量的调试并且与现有优秀算法做对比验证,最终设计出能够稳定飞行的四旋翼无人机飞行器。 关键词:姿态传感器;四元数姿态解算;STM32微型处理器;数据融合;PID
The Manufacture and Design of Quad Rotor Unmanned Aerial Vehicle Abstract Quad-rotor unmanned aerial vehicle aircraft have a simple structure, and it is very easy to control, so it has become popular in recent years. Here article describes in detail the design and the process of making the four-rotor aircraft, including Quad-rotor UAV aircraft flight principle, hardware introduction and selection, implementation and realization of derivation attitude reference algorithm, the system software . The Quad-rotor aircraft control system STM32f103zet microcontroller core, and the advantages and disadvantages based on the accelerometer sensor, a gyro sensor and electronic compass sensors using different correction methods for correcting various sensor data and low-pass digital filter processing, after design complementary filter to estimate the optimal posture, precise attitude measurement. Finally, GPS control and attitude control PID control is superimposed four-rotor aircraft four motors to achieve a variety of flight maneuvers to achieve the purpose. Four-rotor aircraft in the production process, a lot of debugging and do comparison with the existing excellent algorithm validation, the final design to stabilize the Quad-rotor UAV flying aircraft. Key Words:MEMS Sensor; Quaternion; STM32 Processor; Data Fusion; PID
四轴飞行器原理、设计与控制
四轴飞行器原理、设计与控制 四轴飞行器设计与用途 学院:广东白云技师学院 专业:电子信息工程与电气技术(技师本科) 制作学生:邹剑平 指导老师:廖高灵 四轴飞行器简介 配置: 单片机AVRATMEGA168PA 三轴数字陀螺仪MPU—3050电机(无刷)XXD22121000KV电子调速器(无刷)好盈天行者40A螺旋桨1045 电池格氏2200mAh11.1V25C机架DIY 机架材料玻璃纤维铝合金 四轴飞行器飞行原理 重心的距离相等,当对角两个轴产生的升力相同时能够保证力矩的平衡,四轴不会向任何一个四轴飞行器有四个电机呈十字形排列,驱动四片桨旋转产生推力;四个电机轴距几何中方 向倾转;而四个电机一对正转,一对反转的方式使得绕竖直轴方向旋转的反扭矩平衡,保证了四轴航向的稳定. 此飞行控制板规定四轴电机的排布方式如图所示:前(1号),后(4号),右(3号),左(2号). 1,4号电机顺时针方向旋转,2,3号电机逆时针方向旋转.四个电机的转速做相应的变化即可实现四轴横向、纵向、竖直方向和偏航方向上的运动:
当四轴需要向前方运动时,2,3号电机保持转速不变,1号电机转速下降,4号电机转速上升,此时4号电机产生的升力大于1号电机的升力,四轴就会沿几何中心向前倾转,桨叶升力沿纵向的分力驱动四轴向前运动. 当四轴要转向左转向时,1,4号电机转速上升,2,3号电机转速下降,使向左的反扭距大于向右的反扭矩,四轴在反扭距的作用下向左旋转. 四个桨产生的推力,超过或者低于四轴本身重力的时候能够实现竖直方向上升与下降的运动,当桨的升力与四轴本身的重力相等的时候即实现悬停. 其他方式的运动原理与以上过程类似.四轴飞行原理虽然简单,但实现起来还需很多工作要做. 四轴飞行器控制流程图 四轴飞行器的优点 四轴飞行器与其他飞机比较相对稳定性高;四轴飞行器与其他飞机比较相对抗风能力强;载重量大(本机最大安全载重1100g);姿态灵活,反应速度快;可超低空飞行; 四轴飞行器主要用途 可做无人侦察机,空中航拍(FPV),可作为新型微型机器人。娱乐飞行表演 四轴飞行器的特点及魅力除了深受DIY爱好者的青睐之外,还有几点供大家品味: 1、是它的相对简单地机械构造。正因为简单,安全指数大大提高。 无论是作为航空模型还是作为遥控平台,安全永远是第一位的。 2、是它的相对稳定性。飞行姿态平滑稳定,机械振动被仅可能地减小是四轴的又一魅力,装载图像设备再好不过了。 3、是它的相对成本低廉,花尽可能少的钱获取最大的性价比是我们追求的境界,为工业开发其商业用途奠定了必要的基础。
飞行器姿态控制法综述
飞行器姿态控制方法综述 一.引言 经过一个世纪的发展,各种飞行器如雨后春笋般出现,从飞机、导弹到火箭、卫星,从宇宙飞船、航天飞机、空间站到月球探测器、火星探测器。这些飞行器能在空中按预定的轨迹运动总离不开它的姿态控制系统,飞行器在空间的运动是十分复杂的。为使问题简单化,总是将一飞行器的空间运动分解为铅锤平面的纵向运动和水平面内的侧向运动,将飞行器在空间的角运动分解成俯仰、偏航和滚动三个角运动。由于角运.动使飞行器的姿态发生变化,所以对角运动的控制就是对飞行器姿态的控制。对于飞行器姿态的控制,不同的飞行器需要不同的策略,本文主要就飞行器姿态控制方法的应用与发展作一一论述。 二.姿态控制的数学模型 要控制飞行器的姿态,就是要控制使飞行器三个姿态角发生变化的力矩大小。飞行器的姿态模型可以认为是一类不确定MIMO 仿射非线性系统,如式(1)所示: ()//()//()//(cos sin )/cos cos sin sin tan cos tan x y z y x x x x x z x x x y y y x x y x y z z z x x x z x y z I I I M I I I I M I I I I M I ωωωωωωωωωψ ωθωθ??ωθωθ θωθ?ωωθ?=-+??=-+??=-+??=-??=+?=+-?? (1) 式中,x 、y 、z 下标表示空间飞行器的三个主轴方向;I 表示相对于飞行器质心的惯量矩,设飞行器是主轴对称的,则惯量积可以忽略;ω表示飞行器相对于惯性空间的角速度;M 表示控制力矩;,,ψ?θ分别是飞行器的欧拉角。控制了M 的大小,就可以控制飞行器按我们期望的轨迹运动。M 由飞行器上的执行机构产生,常见的有空气舵、推力矢量发动机、反作用飞轮、喷气执行机构或由其它环境力执行机构。 三.飞行器姿态控制方法 3.1空气动力控制 根据运动的相对性原理和气体流动时的基本定律,当飞行器在大气中以一定
四轴飞行器制作
用户名 UID Email 请登录后使用快捷导航 没有帐号?注册 窗体顶端 找回密码 密码注册 窗体底端 快捷导航 首页迟些门户开放时,指向门户首页 全部贴汇总 技术贴汇总所有技术性的帖子汇总,方便阅读 非技术汇总所有非技术性的帖子汇总,方便阅读 帮助Help 无图快速版 阿莫电子邮购本论坛由阿莫电子邮购独家赞助 窗体顶端 搜索热搜: 雕刻机阿莫淘金春风电源 窗体底端 本版 用户 amoBBS 阿莫电子论坛?论坛首页? 机械电子? 四轴飞行? 多旋翼直升机(四轴飞行器)之开源整合平台[电路模组原理... / 4 页下一页 返回列表 查看: 15733|回复: 126 多旋翼直升机(四轴飞行器)之开源整合平台[电路模组原理图] [复制链接] 电梯直达
1楼 发表于2011-1-20 12:12:02|只看该作者|倒序浏览 一、相关技术文件: 1. 程式控制基底ATmega 8 ATmega8 技术文件点击此处下载ourdev_611065Q176XE.PDF(文件大小:2.45M) (原文件名: ATmega8_cn.PDF) 2. 无线模组 CC2500 (2.4G Hz 无线IC) 技术文件点击此处下载ourdev_611064KBBYJG.pdf(文件大小:1.26M) (原文件名: cc2500_cn.pdf) RDA T212 (PA+LNA) 技术文件点击此处下载ourdev_611063XH619C.pdf(文件大小:229K) (原文件名: RDA_T212.pdf) RDA ES02 (SP2T Switch )技术文件点击此处下载ourdev_611062ACP4OA.pdf(文件大小:29K) (原文件名: RDA_ES02.pdf) 3. 无刷马达电子调速模组 FDS7764A (N-Channel) 技术文件点击此处下载ourdev_612408FW8MGC.pdf(文件大小:273K) (原文件名:FDS7764A.pdf) TPC810 (P-Channel) 技术文件点击此处下载ourdev_612409Y3Y2UA.pdf(文件大小:293K) (原文件名:TPC8103.pdf) 4. 液晶萤幕显示模组 16x02 (液晶萤幕) 技术文件点击此处下载ourdev_612410MVKKXZ.zip(文件大小:365K) (原文件名:LCD_1602.zip) 5. MAG 9 FOD 飞行姿态感测模组(3轴磁力计+3轴线性加速计+3轴陀螺仪) LSM303DLH (磁力计+线性加速计) 技术文件点击此处下载ourdev_612411H66HEH.zip(文件大小:2.02M) (原文件名:LSM303DLH.zip) IMU-3000 (陀螺仪) 技术文件点击此处下载ourdev_612412ORGL5T.zip(文件大小:1.93M) (原文件名:IMU_3000.zip) 6. GPS模组 U-BLOX NEO-5Q (GPS) 技术文件点击此处下载ourdev_612413K5MRZI.zip(文件大小:3.03M) (原文件名:NEO_5.zip) 7. 超音波测距模组 HIN-232 (RS-232 5V至10V升压IC) 技术文件点击此处下载ourdev_612414E8JL5V.pdf(文件大小:564K) (原文件名:HIN232.pdf) LM-324 (OP) 技术文件点击此处下载ourdev_612415WGYN7Y.pdf(文件大小:599K) (原文件名:LM324.pdf) 二、TWI(I2C) 通讯规划(用于各个电路模组通讯) M8 TWI(I2C) 规划(PDF档) 电路图档(Eagle档) 点击此处下载ourdev_611067JVY9ZR.zip(文
四轴飞行器说明书
四轴飞行器 作品名称:四轴飞行器 工作原理:四轴飞行器主机采用了意法半导体公司的STM32F103CBT6处理器,该芯片采用ARM32位Cortex-M3内核。具有128K的Flash与20K的SRAM,内部具有锁相环模块,最高频率可达到72MHZ。板载MPU6050,该芯片整合了3轴陀螺仪与3轴加速器的6轴运动处理组件,与处理器采用I2C通信进行数据传送。主机与遥控之间采用的是NRF24L01+模块,该模块工作在2.4~2.5GHz全球免申请ISM工作频段。支持125个通讯频率。使用增强型的Enhanced ShockBurst传输模式,支持6个数据通道(共用FIFO)。通过SPI与MCU连接,速率0~8Mbps。理论传输距离可达到2KM。 飞行器遥控器亦采用STM32F103CBT6处理器,通过摇杆的X,Y轴输出为两个电位器,再通过AD转换读出扭动角度,从而在程序内部定义其所读取角度信息的动作映射。遥控器具有三组微调旋钮,可以调整到其水平位置。遥控器也使用NRF24L01+芯片与飞行器主机进行数据传输。遥控器板载TP4057芯片,可以直接给电池充电。并且使用蜂鸣器,对主机状态(例如:无法连接,低电压,连接断开等)进行报警。 制作材料: 1.STM32F103CBT6:该芯片由意法半导体生产,采用ARM32位Cortex-M3内核。 具有128K的Flash与20K的SRAM,芯片集成丰富的外设,例如:定时器,CAN,ADC,SPI,I2C,USB,UART,PWM等。内部具有锁相环模块,最高频率可达到72MHZ。 2. MPU6050,全球首例整合性6轴运动处理组件,整合了3轴陀螺仪、3轴加速器, 并含可藉由第二个I2C端口连接其他厂牌的加速器、磁力传感器、或其他传感器的数位运动处理(DMP: Digital Motion Processor)硬件加速引擎,由主要I2C端口以单一数据流的形式,向应用端输出完整的9轴融合演算技术InvenSense的运动处理资料库,可处理运动感测的复杂数据,降低了运动处理运算对操作系统的负荷,并为应用开发提供架构化的API。 3. NRF24L01+:一款新型单片射频收发器件,工作于2.4 GHz~2.5 GHz ISM频段。 内置频率合成器、功率放大器、晶体振荡器、调制器等功能模块,并融合了增强型ShockBurst技术,其中输出功率和通信频道可通过程序进行配置。nRF24L01功耗低,在以-6 dBm的功率发射时,工作电流也只有9 mA;接收时,工作电流只有12.3 mA,
四轴飞行器姿态控制算法
姿态解算 姿态解算(attitude algorithm),是指把陀螺仪,加速度计, 罗盘等的数据融合在一起,得出飞行器的空中姿态,飞行器从陀螺仪器的三轴角速度通过四元数法得到俯仰,航偏,滚转角,这是快速解算,结合三轴地磁和三周加速度得到漂移补偿和深度解算。 姿态的数学模型坐标系 姿态解算需要解决的是四轴飞行器和地球的相对姿态问题。地理坐标系是固定不变的,正北,正东,正上构成了坐标系的X,Y,Z轴用坐标系R表示,飞行器上固定一个坐标系用r表示,那么我们就可以适用欧拉角,四元数等来描述r和R的角位置关系。 姿态的数学表示 姿态有多种数学表示方式,常见的是四元数,欧拉角,矩阵和轴角。在四轴飞行器中使用到了四元数和欧拉角,姿态解算的核心在于旋转。姿态解算中使用四元数来保存飞行器的姿态,包括旋转和方位。在获得四元数之后,会将其转化为欧拉角,然后输入到姿态控制算法中。姿态控制
算法的输入参数必须要是欧拉角。AD值是指MPU6050的陀螺仪和加速度值,3个维度的陀螺仪值和3个维度的加速度值,每个值为16位精度。AD值必须先转化为四元数,然后通过四元数转化为欧拉角。在四轴上控制流程如下图: 下面是用四元数表示飞行姿态的数学公式,从MPU6050中采集的数据经过下面的公式计算就可以转换成欧拉角,传给姿态PID控制器中进行姿态控制.
PID控制算法 先简单说明下四轴飞行器是如何飞行的,四轴飞行器的螺旋桨与空气发生相对运动,产生了向上的升力,当升力大于四轴的重力时四轴就可以起飞了。四轴飞行器飞行过程中如何保持水平:我们先假设一种理想状况:四个电机的转速是完全相同的是不是我们控制四轴飞行器的四个电机保持同样的转速,当转速超过一个临界点时(升力刚好抵消重力)四轴就可以平稳的飞起来了呢?答案是否定的,由于四个电机转向相同,四轴会发生旋转。我们控制四轴电机1和电机3同向,电机2电机4反向,刚好抵消反扭矩,巧妙的实现了平衡, 但是实际上由于电机和螺旋
四旋翼无人机制作飞行规则
四旋翼无人机制作飞行(小学组) 技术要求: (1)四旋翼无人机模型现场制作,散件组装。参与现场制作并用现场制作四旋翼飞行的成绩系数1.5,非现场制作商品机系数1。 (2)飞行控制器组委会统一提供,旋翼数量为四旋翼,四轴机架对角电机轴距≤350MM,动力电池电压≤11.1V,无GPS装置加装,螺旋桨直径尺寸≤9寸。遥控器选用2.4G设备。 竞赛方法: 1.一人一机,自行准备安装调试的工具、接线板等设备设施。 2.选手在比赛前将飞行器拆散,拆散后必须等待裁判确认。飞行器拆散要求:通电部分之间互不连接,机架拆散。 3.选手在准备区搭建、调试四轴飞行器(时间120分钟),准备比赛器材。搭建调试过程中,选手应注意人身和财产安全,文明有序。 4.搭建结束后,选手在规定时间内上交四轴飞行器至指定地点,按比赛顺序号(赛前随机设置)准备比赛。第一轮比赛结束后选手可领回四轴飞行器进行调试,准备第二轮比赛。 5.根据比赛顺序,选手在指定赛场的等候区等待进场比赛,不得影响其他选手比赛。 6、裁判宣布“比赛开始”的同时,计时开始。 7、飞行过程中飞行器不得飞跃安全线,飞跃安全线立即终止该
学员比赛并判定0分。 8、计时停止代表比赛结束。以下情况计时停止:a)选手完成任务;b)飞行器有零件脱落;c)裁判认为出现其他应该停止计时的情况。 成绩评定: 比赛任务分值:总分120分 在起飞框架内垂直起飞至目视水平高度(20分),悬停5秒(10分)。正向穿越龙门(20)。拍摄并读出围栏数据(50)。返航着陆,分值区域现场抽签(20、10、5),着陆支架跨界按低分计,着陆区域外为0分。比赛标准时间为100秒,正负时间差以秒为单位,每差1秒总分扣1分。读出围栏数据(不计入飞行时间) 以飞机飞行实际分值计算成绩,如成绩相同以所用时间作为评定成绩。 场地:
2015年全国大学生电子设计大赛四旋翼飞行器论文
2015年全国大学生电子设计竞赛多旋翼自主飞行器(C题) 2015年8月15日
摘要 本文对四旋翼碟形飞行器进行了初步的研究和设计。首先,对飞行器各旋翼的电机选择做了论证,分析了实际升力效率与PWM的关系并选择了此样机的最优工作频率,并重点对飞行器进行了硬件和软件的设计。 本飞行器采用瑞萨R5F100LEA单片机为主控制器,通过四元数算法处理传感器MPU6000采集机身平衡信息并进行闭环的PID控制来保持机身的平衡。整个控制系统包括电源模块、传感器检测模块、电机调速模块、飞行控制模块及微处理器模块等。角度传感器和角速率传感模块为整个系统提供飞行器当前姿态和角速率信号,构成飞行器的增稳系统。本系统经过飞行测试,可以达到设计要求。关键字:R5F100LEA单片机、传感器、PWM、PID控制。
目录 1系统方案 (1) 1.1电机的论证与选择 (1) 1.2红外对管检测传感器的论证与选择 (1) 1.3电机驱动方案的论证与选择 (2) 2系统控制理论分析 (2) 2.1控制方式 (2) 2.2 PID模糊控制算法 (2) 3控制系统硬件与软件设计 (4) 3.1系统硬件电路设计 (4) 3.1.1系统总体框图 (4) 3.1.2 飞行控制电路原理图 (4) 3.1.3电机驱动模块子系统 (5) 3.1.4电源 (5) 3.1.5简易电子示高模块电路原理图 (6) 3.2系统软件设计 (6) 3.2.1程序功能描述与设计思路 (6) 3.2.2程序流程图 (6) 4测试条件与测试结果 (7) 4.1 测试条件与仪器 (7) 4.2 测试结果及分析 (7) 4.2.1测试结果(数据) (7) 4.2.2测试分析与结论 (8) 附录1:电路图原理 (9) 附录2:源程序 (10)