PIX4D空三引入流程
PIX4D空三成果引入流程
1、PIX4D生成的EO文件格式整理,以及所需要的影像整理
首先是后缀改为*.ori;
其次是内容更改如图示:
其次影像的名称也要更改,影像名字更改是为了方便后面引入外方位元素,如图示:
备注:注意红框里面我的更改,这个是方便后面。
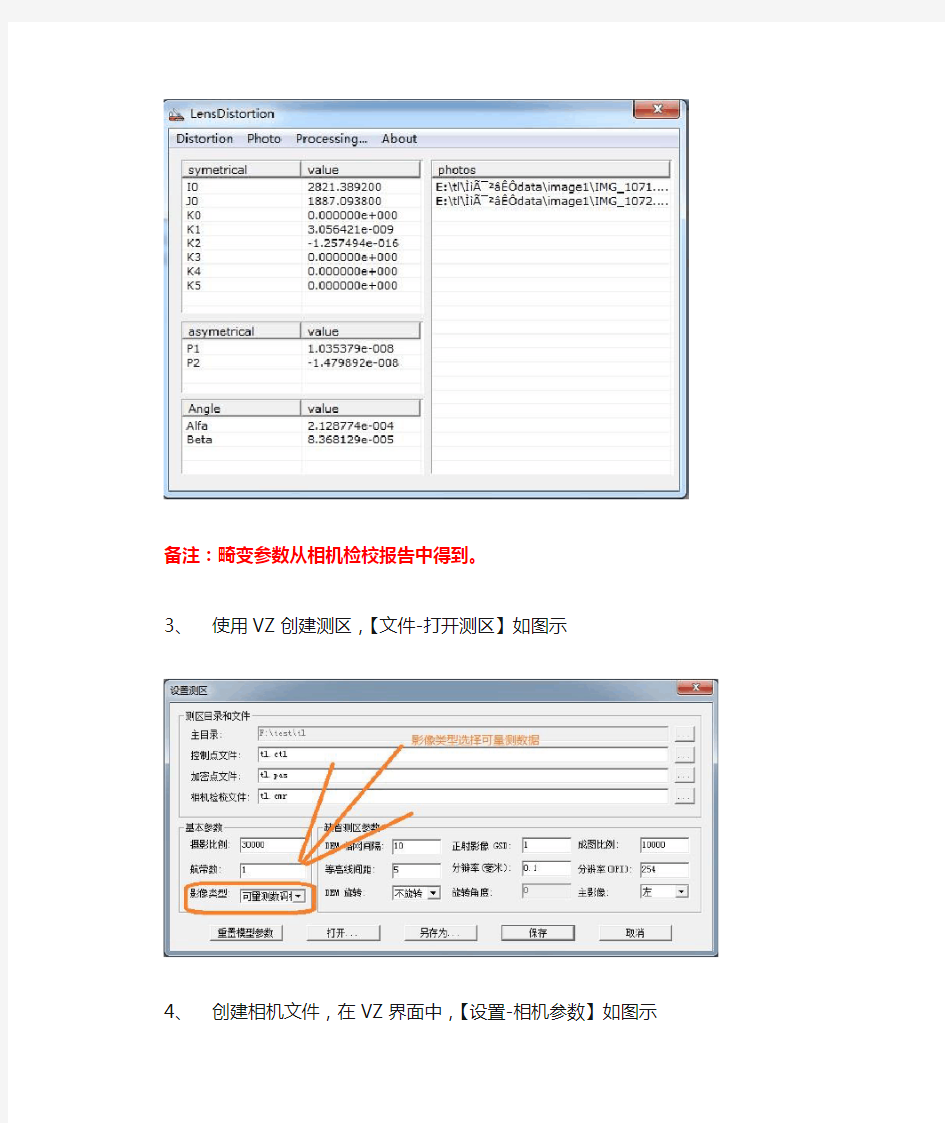
2、影像畸变纠正,如图示
备注:畸变参数从相机检校报告中得到。
3、使用VZ创建测区,【文件-打开测区】如图示
4、创建相机文件,在VZ界面中,【设置-相机参数】如图示
5、影像格式转换,【文件-引入影像】
6、 因为我们是用PIX4D 生成的外方位元素进行定向,所以我们要把每个影像的AOP 文件给
生成出来,如图示:
7、手动设置生成模型,如图示;
8、相对定向,如图示
单击右键,自动相对定向
单击右键,按住左键定义作业区(绿色范围框)
备注:绿色范围框不能超出红色点的范围,如果第一次自动相对定向后点不是很多,可以再一次进行自动相对定向。
9、进行绝对定向,绝对定向是利用刚才生成的AOP文件,所以首先在测区目录下面创建一
个*.pas文件,如图示
其次,进行相对定向,如图示
从上图的残差报告中可以看出残差符合要求。
无人机航空影像空三加密流程
无人机航空影像数据处理 流程 中国测绘科学研究院 北京东方道迩信息技术有限责任公司
目录 1、无人机航空影像数据处理流程 (3) 2、无人机航空影像数据要求 (4) 3、无人机航空影像数据空三加密流程 (5) 3.1畸变差校正 (5) 3.2建立测区工程 (7) 3.3.1工程目录及相机检校文件设置 (8) 3.3.2设置航空影像数据 (10) 3.3.3设置控制点数据 (14) 3.3空三加密 (15) 3.4.1数据预处理 (16) 3.4.2航带初始点提取 (19) 3.4.3自动相对定向及修改 (21) 3.4.4自由网平差 (31) 3.4.5控制点提取及区域网平差 (35) 4、DEM与DOM制作 (37) 4.1 DEM匹配及编辑修改 (37) 4.1.1工程及格式转换 (37) 4.1.2核线影像生成及DEM匹配 (40) 4.1.3 DEM编辑修改 (46) 4.2 DOM纠正及分幅 (52) 4.3.1 DOM纠正及拼接 (52) 4.3.2 DOM分幅 (60)
1、无人机航空影像数据处理流程 高分辨率遥感影像一体化测图系统PixelGrid作为卫星影像数据处理的能力和效率在生产过程中已经得到了很好的验证,其数据适用范围之广、处理效率之高在国内都是其它同类软件无法比拟的。 无人机航空摄影是一种新型的航空影像数据获取方式,由于无人机种类不同以及所搭配的相机不同,其获取数据的质量也不相同,PixelGrid 针对国内测绘部分中低空领域普及的无人机航空拍摄数据,提供了高效快速的处理。 其无人机航空影像作业流程图如下: 图1-1 无人机航空影像处理流程
第六章-空三加密
第六章空三加密 空三加密即解析空中三角测量,指的是用摄影测量解析法确定区域内所有影像的外方位元素。空三加密的传统做法是利用少量控制点的像方和物方坐标,解求出未知点的坐标,使得每个模型中的已知点都增加四个以上,然后利用这些已知点解求所有影像的外方位元素。这中间包含一个已知点由少到多的过程,所以形象地称之为空三加密。 概括地讲,空三加密的目的可以分为两个方面:第一是用于地形测图的摄影测量加密;第二是高精度摄影测量加密,用于各种不同的目的(张剑清,2003)。 本章以MapMatrix系统空三加密相关模块AATMatrix的操作流程为例介绍空三加密的主要流程,包括单像空间后方交会、GPS辅助空三、GPS/IMU联合平差、光束法区域网平差等内容。作为补充和比较,又增加介绍了LPS空三的过程。 6.1 实习内容和要求 本章的实习内容主要是空中三角测量,要求同学们能够掌握控制三角测量和光束法平差的原理方法,熟悉用AATMatrix和LPS两个软件进行空三加密的流程。 6.2 AATMatrix空三加密 6.2.1 原理和操作流程概述 利用测区中影像连接点(加密点)的像点坐标和少量的已知像点坐标及其大地坐标的地面控制点,通过平差计算,求解连接点的大地坐标与影像的外方位元素,称为区域网空中三角测量。区域网空中三角测量提供的平差结果是后续的一系列摄影测量处理与应用的基础。区域网空中三角测量按平差单元可分为航带法、独立模型法和光束法,其中光束法理论最严密、解算精度最高。成为空三的主流方法。 光束法区域网平差的基本思想是,以每张像片为单元,区域内每张像片的控制点、加密点都列立共线条件方程式,建立全区域统一的误差方程,统一平差解算,整体解求区域内每张像片的6个外方位元素及所有加密点的地面坐标。 AATMatrix单个测区工作流程图如图6-1所示:
空三加密inpho5.7操作流程
空三加密技术总结 一、概述 空中三角测量,即解析空中三角测量,是指通过航测内业方法(包括内定向、相对定向、公共连接点的转刺)网构建空中三角网并按严密的数学模型进行区域整体平差,解求出全区所有加密点的地面坐标及像片方位元素。 目前Inpho是主流的航空摄影测量软件,支持对大飞机数据的空三加密,同时有专门的无人机模块对无人机数据进行空三加密,对飞行姿态不稳定的无人机数据具有明显优势。 二、数据准备 在实际工作中需要以下数据: 1、相机检校是航测处理中必不可少的。一般航测后处理中需要相机检校后的焦距(mm)、像元大小(um)、主点偏移(PPA或 PPS)等; 2、航片数据。影像一般以 Tif或 Tif jepg 格式保存、处理。Jpg 格式在压缩过程中信息损失很大,自动空三加密时无法匹配出有效的连接点; 3、粗略的外方位数据。航片的粗略外方位元素,大地平面坐标系统,定位精度在10-20米以内(俯仰角和偏转角尽量控制在20度以下); 4、地面控制点数据。 三、硬件配置情况 联想台式机,四核3.20GHz,4GB 内存。 四、技术路线
五、Inpho应用实例过程 1、数据预处理 (1)原始航片 数据检查,包括航片框幅、分辨率与相机报告中内容的检查。 航片名称与pos中的id号一一对应。 (2)pos数据整理 坐标为CGCS2000高斯克吕格投影坐标。具体包括:id航片号、x坐标、y坐标、h高程、翻滚角、俯仰角、航飞角;以txt文件格式保存;航带间用#间隔。 (3)原始航片畸变处理,利用相机文件中的畸变参数应用Matrax软件。 像主点偏移x0、y0对应Matrax中的x0、y0,径向畸变系数为k1、k2对应Matrax中的k3、k5,像元大小,偏心畸变系数p1、p2对应Matrax中的p1、p2。 (4)控制点数据整理 控制点数据位txt格式,坐标为高斯2000投影坐标,高程为85高。
ORIMA空三加密浅析
文章编号:100926825(2007)0920354202 ORIMA 空三加密浅析 收稿日期:2006210230 作者简介:杨远超(19792),男,助理工程师,铁道第一勘察设计院航测遥感处,陕西西安 710043 杨远超 摘 要:结合兰渝线山区某测段的空三加密,介绍了ORIMA 空三加密的主要流程,总结出在作业过程中提高精度和效 率的一些经验和体会,指出利用ORIMA 空三加密软件,能快速高效地完成加密任务,值得推广应用。关键词:ORIMA ,系统误差,空中三角测量,光束法区域网平差中图分类号:U412.24文献标识码:A 1 相关概念1.1 系统误差 对于摄影测量而言,从摄影开始,直至获取模型坐标整个过程中,都会有系统误差的影响,如:摄影机物镜畸变,摄影感光材料的变形,大气折光,地球曲率以及底片压平等,都造成像片上影像产生误差,还有观测用的仪器,观测员本身的系统误差影响等。由于系统误差的危害很大,所以应当尽力消除或减弱它。 1.2 ORIMA 它的全称为ORIentation Management ,它是Helava 数字摄影测量工作站上区域网光束法平差软件模块。 1.3 空中三角测量 以立体像片上量测的内业点三维坐标为依据,采用严密的数学模型,按最小二乘原理,用少量的地面控制点坐标为平差条件,求解出测图所需的大量控制点的地面坐标。它把大量的野外控制测量工作转移到了室内,提高了效率,缩短了航测成图的周期。 1.4 光束法区域网平差 以一个摄影光束(即一张像片)为平差计算基本单元,以共线条件方程式为理论基础,在像片上量测出各控制点和加密点的像点坐标系后,进行区域网的概算,以确定区域中的各像片的外方位元素及加密点坐标的近似值。而后依据共线条件按控制点和加密点分别列误差方程式,进行全区域的统一平差计算,求解各像片的外方位元素和加密点的地面坐标。 2 ORIMA 空三加密的简要流程 兰渝线兰州至广元段跨越甘肃省、四川省,以兰州东为起点,路经榆中,过高崖乡,从水家坡开始进入隧道群,穿越越裕河、毛寨两个省级自然保护区,最后到达广元,与宝成铁路相接,全长 495km 。由于全区多为山区,植被茂密,交通困难,给外业选点工 作带来极大的不便。在内业加密时,由于山区航线间投影差较大,给接边带来一定的困难,采用重新选点接边的方法,得到了较好的解决。现以B03测段为例,将主要作业流程简介如下: 1)根据相机鉴定表建立SOCET SET 相机文件。鉴于相机文件的重要性,由另外一人复核较妥。 2)创建新工程,按左右相机对应输入影像,进行影像金字塔。3)自动内定向,完成后再逐片检查,如有像片显示没有量测框标或量测的精度不好,应进行手工量测。内定向也是重要的基础工作,应该认真仔细,否则平差不收敛,影响后续工作的进行。 4)建立ORIMA 相机文件。将前面建立的SOCET 相机文件导入并另存即可。一个ORIMA 相机文件可以包含几个参数,所以SOCET 左右相机可在同一ORIMA 相机文件内。 5)建立ORIMA 工程。输入作业员代码及角度单位,配置好工 程文件,按要求输入相对定向、绝对定向限差和探测粗差的参数。 6)用鼠标将B03工程目录下的SU P 文件按相机类型拖入 ORIMA 主菜单的E -N 窗口,再参照外控的布点示意图,调用ORIMA 软件Triangulation —Edit Images 子菜单定义航线号。 7)量测内业加密点。调用ORIMA 主菜单中Load Images —New —Model 子菜单,定义左右片号、航高、航线号、平均地面高 程,然后选择点位分布模板。综合考虑精度与效率,一般选择1-2-1模板。运用TOPMOUSE (自由手)量测内业点,当每一像对量测结束后物方窗口会显示相对定向的精度结果,如超过限差10 μ,可实时修测。8)单航线2D 自由平差。根据需要选择像片,设置好CAP -A 参数,运行平差程序,然后修测粗差点(在E -N 窗口中呈红 色)。如上所述处理完所有航线。 9)输入外控成果,量测四个角点,进行3D 平差后,在物方窗口选取外控点进行反驱动量测,以单航线为单位,运用单航线2D 自由平差中的方法,进行带有外控点的2D 自由平差,修测完粗差后,将Maximum number of 改为50,进行带有外控点的3D 平差,然后消除掉粗差。 10)行航线连接。由于山区航线间影像变形大,再加上植被茂密,自动连接显然不行,而在标准点位转点也十分困难,因此另外在相邻航线间每一像对的平坦地区选择一个特征点,用来连接上下航线,确保航线连接稳固。 11)区域网3D 平差。选取所有的航线,进行全区域的平差,修测完所有粗差点,再进行最终CAP -A 平差计算。 12)用图形化的分析工具,进行成果检查。待检验合格后导出结果文件。 3 结语 1)空三加密是一个较复杂的过程,影响成果的因素很多。 如:测区地形复杂,GPS 构网的网型及点位分布不佳,量测的内业点中存在粗差,外业成果中存在粗差点,刺点点位不佳导致内业量测不准,内业量测时不够仔细等都可导致成果质量不好。为保证成果的精度,首先应该严格控制外业成果,在满足规范的同时顾及内业加密的需要,选取易于判读的点位,如平房顶角,小灌木中心,细长条形地物端点等,而内业不易判准的围墙角根部,高差变化较大斜面上的目标以及界限不明显的地角,则应当尽量避免。内业加密时也应当仔细比对针孔及点位略图,认真阅读点位说明,准确定位。2)采用先量测内业点,剔除粗差,解算收敛,待外控成果完成后,再3D 平差的方法,一方面可以提高项目的工程进度,为下环节测图赢得时间,另一方面也有助于分析误差的来
浅谈无人机航空摄影测量空三加密精度分析
浅谈无人机航空摄影测量空三加密精度分析作者:李文昌 来源:《名城绘》2020年第10期 摘要:随着社会的发展,我国的测绘工程建设的发展也有了改善。借助全数字化的摄影测量系统实行空三加密技术有着高度自动化等诸多特点,其目前也得到了工作站当中各个部门的广泛应用,就现阶段的应用情况来看,它已经使得相关工作效率得到了显著提升。为此,文章就对当前无人机航空摄影测量空三加密技术的应用现状进行了深入分析,同时阐述了其生产的流程,希望借此可以使空三加密技术的精度得到进一步提升。 关键词:无人机航空摄影测量;空三加密;精度分析 1 无人机航空摄影测量空三加密的阐述 实际上空三加密就是空中三角测量,该技术能够借助极少的控制点物方还有像方坐标,求出未知点具体的坐标,并以此使得模型之中已知点的数量能够提升至四个乃至更多,同时通过上述已知点还可以进一步分析与研究位于影像外方向上的各种元素。倘若空三加密精度达不到标准,那么便极有可能会出现航空摄影测量外业像控点的量测以及航飞环节被迫返工等情况,从而导致航空摄影测量内业的后续流程无法正常进行。相较于传统的航空摄影测量,应用无人机进行航空摄影测量所需要投入的成本较少,并且时效性也要更强,其近些年在绘制地形图以及三维建模等工作当中得到了极为广泛的运用。然而,凡事皆有弊端,该技术同样也不例外,例如影像畸变较大、姿态的稳定性不够以及基高比偏小、高程的精度较低与模型的切换过于频繁等等。当前我国市场上还未出现一款可以完全解决上述所有问题的无人机航空摄影测量空三加密软件,现有的精度几乎无法满足我国传统航测的标准与要求。 2 数据与研究方法 2.1 数据获取 首先,选取了图书馆侧面的拐点,道路交叉点等20个控制点,然后使用DronesMap软件进行航线设计,通过全景图查看收藏位置并获取实景图,预览最佳航拍点。飞行前设定相关参数,保证有效的航向和旁向重叠,旁向重叠度设置为15%—60%,最小不小于8%,航向重叠度设置为60%—80%,最小不应小于53%。最后基于2次正摄和6次倾斜摄影的飞行路线拍摄到162张建筑物序列影像。将本次拍摄的影像数据分为两组,数据一和数据二的拍摄高度和影像数量均有差异,数据一的航拍高度和影像数量均大于数据二,数据源的差异便于后期对建模影响因素的分析。
无人机影像空三后处理流程
1、数据的准备 A、原始影像以及曝光点数据 无人机低空航摄采用的是普通数码相机,需要进行相机畸变纠正才能用于后期空三处理。但是我们采用的是双拼相机,原始影像是分为前后相机,而且相片好是一一对应的,这个是必须注意的。 曝光点数据是指的每张相片曝光时的坐标数据,它也是与相片一一对应的。B、像控点数据像控点数据包括像控点坐标和点之记以及像控点刺点图,点之记主要是记录像控点所在位置的信息,刺点图记录的是像控点在图像上的准确位置,方便空三加密是刺控制点。 2、数据预处理 数据预处理与空三软件有关,也与相机有关。普通相机的相片需进行畸变纠正,双拼相机的影像需进行前后相片的拼接,拼接过程已经进行了畸变纠正。一般相片预处理时需将相片按照航带分开并按照飞行方向适当旋转(相邻航线的相片旋转角度相差180 度),有的空三软件需将相片格式转换为tif 格式才能做后期处理,在转格式和旋转相片时,为了保持相片信息不丢失,最好是PhotoShop软件来处理,为了提高效率,可以采用PS的批处理命令。如果是用MAP-AT软件的话,相片可放在一个目录,格式也不需转换,直接用JPEG格式,但 是仍需按照航带旋转相片,这是为了方便批处理建立空三的工程文件。像控点数据按照编号和航带分好目录。 3、空三加密处理 空三加密处理是航摄中最重要的步骤,也是最繁琐的步骤。不同的软件空三步骤有些许不同,但是大同小异。一般都是先做内定向,然后是相对定向,最后做绝对定向,绝对定向是需要控制点数据的。所谓加密其实就是平差过程,为了提高加密精度一般在最后都会在绝对定向的基础上做一次在整体的光束法平差,光束法整体平差不引入中间步骤的参数,是以精度最高。当然这只是理论上的流程,真正的处理过程比较繁琐也不是全按照流程,只要知道每一步流程的作业就行。 这里以MAP-AT软件为例讲解下空三流程: (略,可参考MAP-AT处理流程文档) 4、生成DEM和DOM 做完空三之后就可以生成DEM和DOMT,在相对定向之后可以将部分加密点假设为已知点,所以相对定向之后就可以做这一步了,如果只是需要没用坐标的正射影像的话,可以在相对定向之后做这一步。生成DEM其实就是软件自动匹配加密点的过程,增加加密点的密度 就可以得到不能分辨率的DEM但是电脑自动匹配的加密点总会有错误的,所以如果要出DEM 成果是必须要人工编辑的。生成DEM需要所在影像的高程数据,也就是DEM可以用电脑自 动生成的DE(未编辑的),也可以用已有的DEM数据,如等高线数据等。但是已有格式DEM 可能和软件所用格式不同,须进行格式。DEM的格式,有点空三软件是自带,有的需用ARCGIS 或者ERDA勞软件来处理。 5、镶嵌匀色 在上一步中生成的DOME射影像都是单张相片纠正过来的,为了得到整幅影像需进行镶嵌处理,镶嵌的意思就是不同的相片按照坐标和纹理进行拼接处理。不同的相片对比度和色 调不一致,所以在拼接前还需进行匀光匀色处理,匀光是统一对比度,匀色是统一色调。匀光匀色软件很多,有的是空三软件自带的(如DPGrid),有的是单独的,有的和镶嵌软件是 一体的。但是所有的镶嵌匀色软件处理步骤都大同小异。匀光匀色有不同的算法,主要是两 种,一种是整体的自适应算法,这个算法是根据所有形象的对比度和色调信息计算出一个整体统一的
jx4空三加密手册
目录 第一章自动数字空中三角测量系统作业流程图 (3) 第二章Geolord-AT软件系统简介及安装 (4) 第三章空中三角测量的作业步骤 (7) 第四章数据文件及格式说明 (13) 4.1 测区信息文件(*.inf) (13) 4.2 摄影机信息文件(*.ftc) (14) 4.3 大地控制点、摄站控制点坐标文件(*.gd) (15) 4.4 相对控制数据文件(*.gdr) (16) 4.5 测区接边文件(*.jb) (17) 4.6 框标量测坐标文件(*.KB) (17) 4.7 框标内定向文件(*.OUTKB) (17) 4.8 像点原始坐标文件(*-*.MD) (18) 4.9 像点坐标文件(*??.SD) (19) 4.10 模型点坐标文件(*??.BCT) (19) 4.11 像片中心点坐标文件(*.ZHX) (20) 4.12 像点坐标文件(*.IP) (20) 4.13 像片中心平面坐标文件(*.SG) (21) 4.14 相对定向信息文件(*??.OUTS) (21) 4.15 多项式整体平差文件(OUTP) (22) 4.16 加密点大地坐标文件(*.DMC;*.BMC) (22) 4.17 数据传递中间文件(*.BMSG) (22) 1
4.18 粗差点信息文件(*.ERR) (22) 4.19 光束法整体平差信息文件(*.OUTB) (23) 4.20 像片外方位元素文件(*.SEL) (23) 4.21 测区接边信息文件(*-*.OUTC) (23) 4.22 适普数据信息文件(*.SHP) (23) 4.23模型绝对定向残差信息文件(*.ABO) (24) 第五章菜单功能键击活说明 (25) 5.1 “辅助功能”模块 (25) 5.2 “输入信息”模块 (26) 5.3 “影像处理”模块 (26) 5.4 “内定向”模块 (26) 5.5 “选点”模块 (26) 5.6 “构建自由网”模块 (26) 5.7 “编辑*.ip文件”模块 (27) 5.8 “修改坐标”模块 (27) 5.9 “删除点”模块 (27) 5.10 “整体平差”模块 (28) 5.11 “各种检测”模块 (29) 2
空三加密流程
现阶段生成DOM的方式有多种,单片微分纠,全数字摄影测量系统。但他们的工作原理都基本上是一样的。都是通过DEM和原始扫描影像来生成正射影像的。而今我们主要用到的是全数字摄影测量系统生成DOM。 利用全数字摄影测量系统生成DOM 它的基本作业流程如下: 1原始航片的扫描。 2外业控制测量。 3解析空三加密解算。 4全数字摄影测量的“三定向”。 (1)内定向:利用框标检校坐标与定位坐标,得到扫描坐标系与像片坐标系间的变换关系。 (2)相对定向:恢复构成立体像对的两张像片的相对方位,建立被摄物体的立体模型。 (3)绝对定向:由人工立体观测在左右影像上定位控制点,建立起像平面坐标系和大地坐标系的对应关系。 5按核线方向排列生成核线影像。同名像点必然位于同名核线上,经过核线排列生成的核线影像,在立体观测时必然没有上下视差。基于正射影像的制作我们一般生成水平的核线,以保证DOM的质量。 6影像匹配。一般全数字摄影测量系统均采用“金字塔”式的多级匹配。 7,通过影像匹配结果,手工绘制一些特征点线导入匹配立体编辑。进一步编辑DEM。 8读入初值点、特征点线、结合立体交互的编辑结果,自动生成准确的单独的相邻的左右核线影像数字高程模型DEM。 9利用单独的相邻的左右核线影像数字高程模型DEM,生成单像对的数字正射影像(DOM)。正射影像的成果质量到现在只受上面的三个方面影响。首先选用左右核线影像得到的DOM是有差别的;其次是连续像对的绝对定向不一致时,DOM的接边必然出现系统误差,如错位或重影等。立体交互编辑左右像对DEM的接边误差也会影响到DOM;有什么样的DEM模型必然生成什么样的DOM,在生产DOM时的DEM不一定是正确的。正确的DEM 并不一定能生成正确的DOM。最简单的例子就是山谷或河流上的高架路,正确的DEM生成的DOM必然是V型的道路,原因就是数学模型是V型山谷。 10DOM的镶嵌精度检查。这个过程主要通过PS技术来检测。 空中三角测量是立体摄影测量中,根据少量的野外控制点,在室内进行控制点加密,求得加密点的高程和平面位置的测量方法。其主要目的是为缺少野外控制点的地区测图提供绝对定向的控制点。空中三角测量一般分为两种:模拟空中三角测量即光学机械法空中三角测量;解析空中三角测量即俗称的电算加密。模拟空中三角测量是在全能型立体测量仪器(如多倍仪)上进行的空中三角测量。它是在仪器上恢复与摄影时相似或相应的航线立体模型,根据测图需要选定加密点,并测定其高程和平面位置。
摄影测量基础课程设计(空三加密)
摄影测量基础课程设计(空三加密实验) 实习报告 学院遥感信息工程学院 班级 学号 姓名 日期2011年12月24日 1
一、空三加密 1.加密计划 ·13 ·12 ·14 102 ·22 ·24 21 23 8033401 202 ·32 33 ·34 9033401 ·加密点像主点控制点 2.利用WUCAPS解算 1.构建自由网 模型定向结果
2.光束法平差结果 像点观测值中误差:7.7微米 定向点残差 检查点残差 二、 内定向解算 1.内定向解算流程 计算公式: y b x b b y y a x a a x 210210++='++=' 其中x , y 表示扫描坐标,y x '',为像平面坐标。根据最小二乘原理,利 用8个方程求解出6个仿射变换系数:)()(1PL A PA A X T T -= 2. 内定向计算结果 像片编号:0319 仿射变换系数为: a0=-115.369111 a1=0.020991 a2=-0.000019 b0=-118.505165 b1=0.000019 b2=0.020988 逆仿射变换系数为:
a0'=5501.359533 a1'=47.639959 a2'=0.043709 b0'=5641.301484 b1'=-0.042416 b2'=47.645139 像片编号:0320 仿射变换系数为: a0=-115.702186 a1=0.020990 a2=-0.000020 b0=-118.488226 b1=0.000018 b2=0.020989 逆仿射变换系数为: a0'=5517.813035 a1'=47.642464 a2'=0.046214 b0'=5640.442233 b1'=-0.041386 b2'=47.643811 像片编号:0321 仿射变换系数为: a0=-115.767989 a1=0.020990 a2=-0.000021 b0=-118.528094 b1=0.000020 b2=0.020988 逆仿射变换系数为: a0'=5520.953536 a1'=47.641138 a2'=0.047540 b0'=5642.348736 b1'=-0.044923 b2'=47.647349 像片编号:0332 仿射变换系数为: a0=-118.255058 a1=0.020990 a2=-0.000023 b0=-118.243295 b1=0.000023 b2=0.020988 逆仿射变换系数为: a0'=5639.984539 a1'=47.641431 a2'=0.051964 b0'=5627.551484 b1'=-0.052148 b2'=47.645139 像片编号:0333 仿射变换系数为: a0=-118.486044 a1=0.020991 a2=-0.000026 b0=-118.199845 b1=0.000024 b2=0.020989 逆仿射变换系数为: a0'=5651.578544 a1'=47.640252 a2'=0.058152 b0'=5624.910733 b1'=-0.055537 b2'=47.643811 像片编号:0334