第6章 同步电机的动态分析

第六章同步电机的动态分析
在《电机学》和电力专业课学过同步电机基本理沦的基础上,本章着重讨论同步电机的异步运行、小值振荡和自激问题,作为机电能量转换理论的应用实例,也作为电力专业课程的补充。
为了突出本质和使计算简化,本章的分析采用以下近似假定:
(1)忽略磁路饱和、磁滞和涡流的影响;
(2)定、转子绕组所产生的气隙磁场按正弦分布,忽略磁场的高次谐波分量;
(3)转子结构对直轴和交轴对称;
(4)将转子阻尼绕组简化为直轴和交轴两个独立的等效阻尼绕组。
6—1用dg0坐标系统表示的同步电机运动方程
同步电机也可采用综合矢量进行分析。但由于转子磁路不对称,一般都采用dQo坐标系统,以克服abc坐标系统中电压方程是带有周期性变系数的微分方程给求解带来的困难。
在研究同步电机运行的领域内,由于各个作者规定各物理量的正方向不一致,同样采用dQo 坐标系统所写出的基本方程中的正负号也互不相同。本章采用的规定正方向与上章一致,重申于下:P177
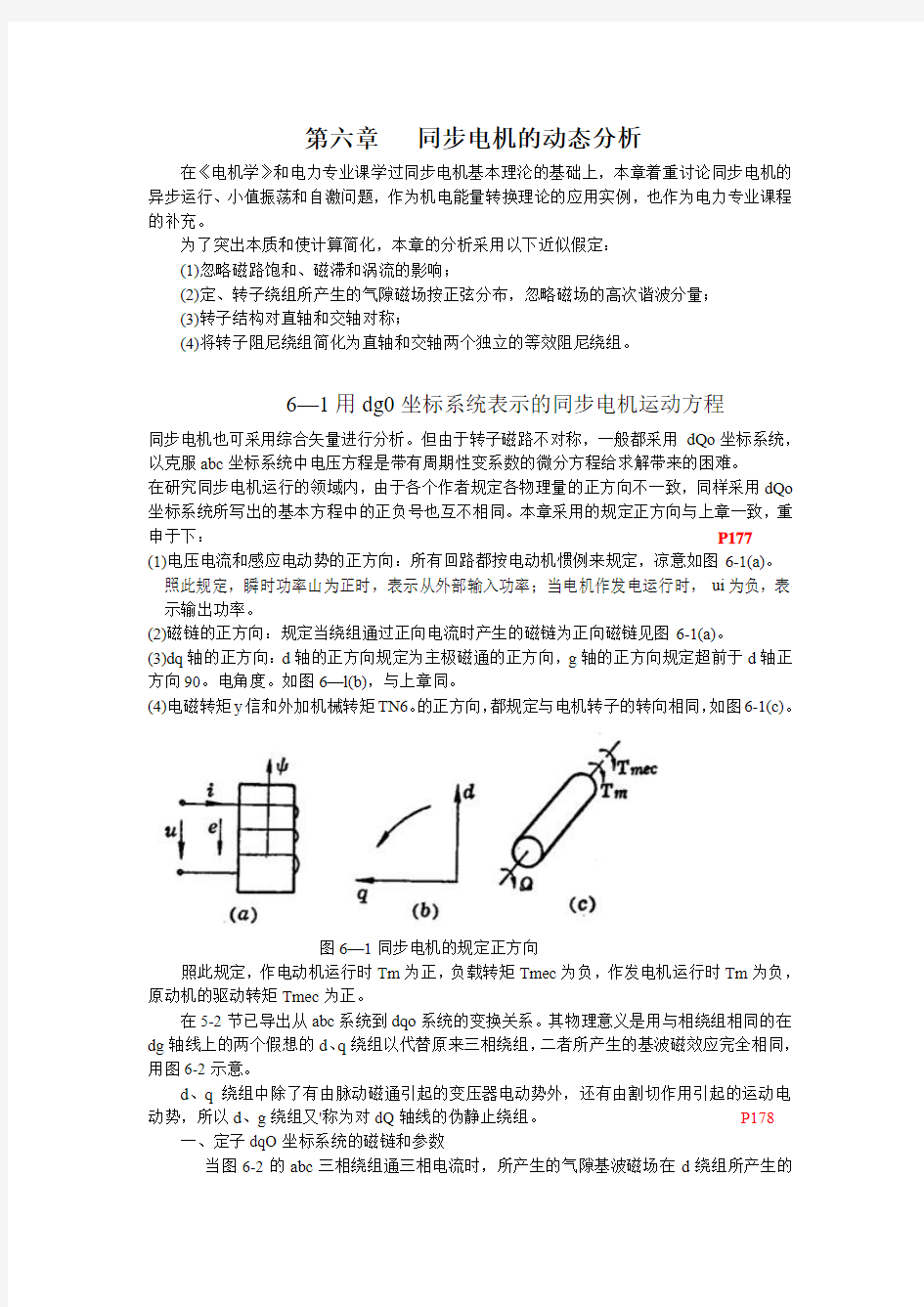
(1)电压电流和感应电动势的正方向:所有回路都按电动机惯例来规定,凉意如图6-1(a)。照此规定,瞬时功率山为正时,表示从外部输入功率;当电机作发电运行时,ui为负,表示输出功率。
(2)磁链的正方向:规定当绕组通过正向电流时产生的磁链为正向磁链见图6-1(a)。
(3)dq轴的正方向:d轴的正方向规定为主极磁通的正方向,g轴的正方向规定超前于d轴正方向90。电角度。如图6—l(b),与上章同。
(4)电磁转矩y信和外加机械转矩TN6。的正方向,都规定与电机转子的转向相同,如图6-1(c)。
图6—1同步电机的规定正方向
照此规定,作电动机运行时Tm为正,负载转矩Tmec为负,作发电机运行时Tm为负,原动机的驱动转矩Tmec为正。
在5-2节已导出从abc系统到dqo系统的变换关系。其物理意义是用与相绕组相同的在dg轴线上的两个假想的d、q绕组以代替原来三相绕组,二者所产生的基波磁效应完全相同,用图6-2示意。
d、q绕组中除了有由脉动磁通引起的变压器电动势外,还有由割切作用引起的运动电动势,所以d、g绕组又'称为对dQ轴线的伪静止绕组。P178
一、定子dqO坐标系统的磁链和参数
当图6-2的abc三相绕组通三相电流时,所产生的气隙基波磁场在d绕组所产生的
磁链可写成
[])120cos()120cos(cos ?++?-+=ψθθθIc Ib Ia Laad ad
(6-1)式中Laad 为d 绕组与a 绕组轴线重合时的互感,当两绕组相隔g 电角度时,互磁链与
cos θ成正比。
图6—2从abc 系统变换到dqo 系统的示意图
这磁链也可看成是由d 、q 绕组通过等效电流Id,Iq 产生相同的气隙磁通时的d 绕组等效自感磁链,亦即ad
ψ也可写成)]120cos()120cos(cos [3
2
?++?-+?==ψθθθc b a ad d ad ad i i i L i L
(6--2)式中L ad 称为直轴电枢反应电感,又d i 的变换是用式(5--7)第一分式代入。则式(6--1)和(6--2)两式右边应当相等,显然可得L-d 与l-od 间的关系为 P179
aad L =
ad L 32 即L ad =
aad L 23 ( 6-3)
同
理
可
导
出
g
绕
组
等
效
自
感
磁
链
为
)]120sin()120sin(sin [?++?-+-=θθθψc b a aaq aq i i i L
及)]120sin()120sin(
sin )[(32?++?-+-=ψθθθc b a aq aq i i i L 式中L aaq 为q 绕组与a 绕组轴线重合时的互感,Laq 为交轴电枢反应电感。因此L aq 与L
aaq
间
的
关系为
aaq
aq aq aaq L L L L 2
33
2
==即
(6-4)
除定子电流外,转子电流也要在d 、g 绕组产生磁链。与d 绕组有变压器作用的有励磁绕组F 和直轴阻尼绕组D ,与q 绕组有变压器作用的有交轴阻尼绕组Q ,因此考虑到转子方面绕组的互感作用,与气隙磁通密度对应的定子直轴和交轴磁链为
D aD F aF d ad md i M i M i L ++=ψ Q aQ q aq mq i M i L +=ψ
式中aF M 、M ad 和M aq 分别为转子的F 绕组、D 绕组和Q 绕组与定子的相绕组轴线重合时的互感。;
直轴和交轴绕组的总磁链应为上式所示磁链与相应漏磁链的总和,即可写成
q mq q i L σ+ψ=ψ
d md d i L σ+ψ=ψ
式中σL 为定子直轴或交轴绕组的漏磁电感。由坐标变换式(5-6)和上式,定子a 相绕组的总磁链可写为 P180
o
o q mq d md o q d a i L i L i L ++-+=+-=θψθψψθψθψψσσsin )(cos )(sin cos
(6-7)
同时a
ψ真又
c b a aa mq m
d a i M i M i L σσσθψθψψ--+-=sin cos (6-8)
式中L σqq 和M σ为定子绕组的漏磁自感和漏磁互感,L 。为零序电感。上两式的右边应当相等,则消去含md ψ、mq ψ项后可得
σσσσσθθi M i M i L i L i i L b a aa o o q d --=+-)sin cos (
又上式右边
o
o aa q d aa o o q d aa o
a aa a o a aa i M L i i M L i M i i i M L i M i M L i i M i L )2()sin cos )((3)sin cos ((3)()3(-+-+=-+-+=-+=--=σσσσσσσσσσσθθθθ)
以上等式头尾两边对应项的系数应当相等,从而得
σ
σσσM L L M L L aa o aa q 2-=+= (6—9)
式(6-3)、(6-4)、(6-9)为dqo 系统与abc 系统间的参数关系。由于d 、q 绕组和相绕组相同,故电阻相等都为冗。再令
σ
σL L L L L L aq q ad d +=+= (6-10)
式中Ld 为直轴同步电感,L 。为交轴同步电感。
将式(6-5)代入式(6-6)后,按式(6-10)整理,并参考式(6-7),可得d 绕组、q 绕组的总磁链和零序磁链分别为 P181
o
o o q eQ q q q D aD F aF d d d i L i M i L i M i M i L =+=++=ψψψ (6-11) 二 转子绕组的磁链 励磁绕组的磁链为
D
FD F F F F d aF D FD F F c b a F a D
FD F F c b a aF F i M i L i L i M i M i L i i i M i M I L i i i M +++=++?++?-+=
++?++?-+=23
)]120cos()120cos(cos [3
2
*23)]120cos()120cos(cos [F ψθθθθθθψ即 (6-12) 同理直轴阻尼绕组和交轴阻尼绕组的磁链为
D D F FD d aD D i L i M i M ++=23ψ (6-13)
Q Q q aQ Q i L i M +=2
3
ψ (6-14)
式中L F ,L D ,Q L 为F 绕组、D 绕组和Q 绕组的自感,M FD 为F 绕组与D 绕组间的互感。从以上三式可看出由于坐标变换使定子和转子间的互感成为不可逆;转子电流产生的定子磁链其互感为aQ aD aF M M M ,,;而定子电流产生的转子磁链其互感则为号
aQ aD aF M M M 2
3
,23,23 三 定子和转子绕组的电压方程
利用坐标变换式(5—6)并考虑到ωωθθψθ,,=+=D t o 为转子的电角速度。o θ为t=0时d 轴对a 轴的角位移。定子a 相绕组的电压方程可写成 P182
)
(sin )(cos )()sin cos ()sin cos (o o q q d q d o q d o d a
a a Ri D D Ri D i i i R D Ri D u +++-+-=+-++-=+=ψθωψψθωψψθθψθψθψψ
又因 o q d a u u u u +-=θθsin cos
对比以上两式右边,显然可得到dq0系统的定子电压方程为
o
o o q d q q d
q d d Ri D u Ri D u Ri D u +=++=+-=ψωψψωψψ (6-15) 转子电压方程为
Q
Q Q D D D F
F F F i R D i R D i R D u +=+=+=ψψψ00 (6-16)
四 功率和电磁转矩
同步电机机端总功率输入
dqo t t dqo abc t dqo abc t abc c c b b a a ci c u i cu i u i u i u i u P )()()(===++= (6-17)
式中变换矩阵c 由式(5-6)已知为c=)
120sin()120cos()120sin()120cos(
sin cos ?+-?+?--?--θθθθθθ
由此可以导出 3
0230
02
3
=c c t P183 代入式(6-17)可得dqo 系统的功率表达式为
o o q q d d i u i u i u P 32
3
23++=
(6-18) 注意这里由于采用的是磁动势不变的而非功率不变的坐标变换,故上式右边的系数不等于l 。当不含零序分量时,从abc 到dq 系统的变换相当于三相到两相的变换,这是系数2
3
的物理基础。
再将上式的o q d u u u ,,以式(6-15)代人,整理后可得
)(2
3)(23)2(23222o q d d q q d o o q q d d i i i R i i D i D i D i P +++-+++=ωψψψψψ
(6-19)
上式两边各项的具体意义对应如下:
输入电功率=(气隙磁场储能变化率)+(通过气隙传递的电磁功率)+(定子电阻损耗). 由此可得电磁功率和对应的电磁转矩的dq 系统表达式如下:
ωψψ)(23
d q q d m i i P -= (6-20)
)(23
d q q d m m i i p p
P T ψψω-== (6-21)
以上各式都是按电动机惯例导出的。如作发电运行,则按上两式算出的m P 和m T 都是负值,表示输出电功率和制动转矩。
同步机的转矩方程按图6-1(c)的规定正方向可写成
dt
d R dt d J T T m Q m mcc
m θθ+=+2
2 (6-22)
式中J 、Q R 和m θ的意义与式(5-58)同 P184
6—2同步电机的标么值运动方程
同步电机的暂态分析通常采用标么值,亦即各物理量的实在值与选定的该量的基值之比值。标么值在一些先修课程中已经用过,本节只围绕同步电机的特点作扼要的叙述。
一、同步电机标么值
同步电机物理量的基值可分为两类:一类量的基值是惯用的,统一的,如定子各量和转矩、角速度、时间等通常选择额定值作为基值,详见表6-1。另一类如转子各量的基值可以有不同的选择,本书只介绍最常用的一种。
上节已讲在dqo 系统中定转子间的互感是不可逆的,为了计算方便,通常需要选取转子各量的基值系统,使得用标么值表示的定、转子间的互感成为可逆。 P185
将式(6-11)的D aD F aF d d d i M i M i L ++=ψ和式(6-12)的D FD F F a aF F i M i L i M ++=
2
3
ψ,利用基本关系b b b i L =ψ及Fb mb Fb i L =ψ,并设d i 的基值为i db i ,可将这两式写成标么值形式如下;·
*
*******
******D FD F F d Fa F D aD F aF d d d i M i L i M i M i M i L ++=++=ψψ (6-23)
其中
Fb
Db FD FD Fb b aF Fa b
FD
aD
aD b
FD
aF
aF i M M i M M i M M i M M ψψψψ====**
**,23
, (6-24)
后可得该式两边乘以即必须
要使b ,**2
3
,23M ωψψψψD b Fb Fb Fb b b
Fb
Fa aF i i i i M ==
=
D D Fb Fb i u i u 23
= (6-25)
必须满足和同理可证要使,M ****Qa aQ Da aD M M M ==
b b Db Db i u i u 2
3
=
(6-26) b b Qb Qb i u i u 2
3
= (6-27)
可见要使用标么值表示的定、转子间的互感成为可逆,转子每一电路的伏安基值须选取等于定子三相的伏安基值。
下面进一步分析怎样用标么值表示使在同一轴线上的互感都相等,这样计算将更方便。按式(6-10)σσL L L L L L aq q ad d +=+=和,其中σL L L aq ad ,,的标么值分别为 P186
b
b aq aq ad ad L L
L L L L L L L b σσ===
***,, (6-28) 为使在同一轴线上与定、转子互链的磁通相对应的电感用标么值表示时都相等,亦即
*
****aQ aq aD aF ad M L M M L === (6-29)
上式所有标么量用式(6-28)。(6-24)的有关分式一一代入,得
b
Qb aQ b aq b Db aD b Fb aF b ad i i M L i
M i M L L ===L 和ψψ 整理上列关系并用代入就得b b b i L =ψ
aQ
b aq Qb aD b
ad Db aF
b
ad Fb M i L i M i L i M i L i =
=
=
(6-30) 以上阐述的基值系统,通常称为ad L 或ad X 基值系统。采用这种基值系统后,互感在形式上成为可逆,系数
2
3
已不复存在;还有,在同一轴线上用标么值表示的与气隙磁通相对应的互感都相等,例如)(*******D F d ad d d i i i L i L +++=σψ等等。
还应指出,这里假定气隙磁通密度是正弦分布的,在这种基值系统中,两轴线上转子绕组电流基值的选择,是要使该电流所产生的气隙磁通密度与定子相应绕组通过基值电流时所产生的气隙磁通密度相同,亦即它们在定子相应绕组中感应的电动势是相同的,这可从式(6-29)。(6-30)看出.此外,在这种基值系统中,标么值电压方程具有和实在值相同的形式,
下段阐明。 P187
二、用标么位表示的同步电机的运动方程
将定子电压方程(6-15)除以定子电压基值b b D D b i Z u ==ψω,可得定子电压标么值方程
组为*
**
*
******
***
*****
*o o o q d q q d q d d i R dt d u i R dt d u i R dt d u +=
++=
+-=
ψψωψψωψ (6-31)
将转子电压方程式(6-16)分别除以励磁绕组和阻尼绕组的电压基值,可得转子电压标么值方程组为
*
**
*****
*
**
*
*00Q Q Q D D D F F F F i R dt d i R dt d i R dt d u +=
+=
+=
ψψψ (6-32)
将定转子的磁链方程式(6-11)一(6--14)除以相应的磁链基值,并注意到
******,,Qa aQ Da aD Fa aF M M M M M M ===
以及关系式**L L L
Z L
x b
b
b ==
=
ω 可得磁链标么值方程组为 P188
***********************************
*****
*********
******
******Q Q q aQ Q Q q aQ Q D D F D d aD D D F FD d aD D D FD F F d aF D FD F F d aF F o o o o o Q aQ q q Q aQ q q q D aD F aF d d D aD F aF d d d i x i x i L i M i x i x i x i L i M i M i x i x i x i M i L i M i x i L i x i x i M i L i x i x i x i M i M i L +=+=++=++=++=++===+=+=++=++=ψψψψψψ (6-33) 将功率基值b b b i u S 23=
和转矩基值b b b i p T ψ2
3
=分别除功率和电磁转矩方程(6-18)和(6-21),可得功率和电磁转矩的标么值表达式为
)
356()346(2************--=-++=d q q d m o o q q d d i i T i u i u i u P ψψ
而转矩标么值方程由式(6-22)可写成***
*
**Ω+Ω=+ΩR dt d H T T j
mec m (6-36)
式中b
b b b
j S R R p S J H 2
*3,Ω=Ω=ΩΩ。 6—3同步电机的等效电路及电抗函数
同步电机的电压方程组是常系数线性微分方程,用经典法求解较繁,一般采用拉氏变换
法。当初始条件不为零时,从原函数转换成象函数,须计及初始值,这样所列出的运算式仍较繁。本节以下都采用增量分析法,即建立零初始条件的增量运算式求解,由叠加原理计及初始状态,得出最后结果。上节已导出同步电机的电压和磁链的标么值方程组,各分式的系数都是常量又互感是可逆的,而*****aq aQ ad aD aF x x x x x ===和。应用拉氏变换将这些在时域内的方程变换到复频域内后,可画出它们的等效电路。由于以下分析都采用标么值方程,为了书写方便,将表示标么值的下标*号省去。 P189
一、由等效电路求电抗函数
由式(6-32)和(6-33)可写出定子直轴磁链和励磁绕组及直轴阻尼绕组的电压标么值
方程为D
D D D F FD d ad D D D F F D FD F F d ad F F F F D
ad F ad d d D aD F aF d d d i R i x i x i x D i R D i R i x i x i x D i R D u i x i x i x i x i x i x +++=+=+++=+=++=++=)(0)(ψψψ (6-37)
在零初始条件下,应用拉氏变换将其变换到复频域内,只需将上式中的D 改写成p 而方程的形式不变。因此拉氏变换后的运算式
为
;
.
)
()()()(0)()()()()()
()()()(p i p
R
x p i x p i x p i x p i p
R
x p i x p p u p i x p i x p i x p D D D F FD d ad D FD F F F d ad F D ad F ad d d d +++=+++=++=ψ (6-38)
上式的后二分式是将式(6-37)进行拉氏变换后,两边同除以p 后所得的结果。以下为了简便,有时将标号(p)省去,特别是在等号右边。 P190
考虑到ad d x x x +=σ真知根据式(6-38)可画出相应的直轴等效电路如图6-3所示,其中各电抗所对应的磁链如图6-4所不,与ad x 叫相对应的磁链跨过气隙同时与三个绕组相链,与各漏抗σσσD F x x x ,,相对应的磁链只与各自绕组本身相链,而与励磁绕组9和阻尼绕组D 间的互感漏抗FD x 。相对应的磁链并不跨过气隙,但同时与F 和D 两绕组相链,因此,上述各电抗间的关系为
ad
FD FD ad FD D D ad
FD F F x x x x x x x x x x x +=++=++=σσσσσ (6-39) σFD x 一般很小可略不计,即认为ad FD FD x x x =≈则,0σ。同时考虑到
σσD FD D F FD F x x x x x x =-=-,,则图6--3可进一步简化成图6--5(a)。应用电路的戴维南
定理,图6--5(a)又可进一步简化成图6--5(b)·,亦即)()()()()(p i p x p u p G p d d F d +=ψ(6--40)曲等效电路图可求得直轴电抗函数为 P191
]}
)()[(])()2{[(()[])()({[)]}
()[()]()({[)]}
()())([()])(({[1111
)(22
22232222222
2D F F D D F ad D F D ad F ad ad ad D ad F d F
ad F D F D D ad F ad F D D F ad D F ad d D D ad F F D D ad F F ad d D D ad F F ad F F D D F F D D ad ad d F
F D D ad d R R p R x R x p x x x p R x R x p x x x x x x R x R x x R p x x x x x x p R R x p x x x x p
R x x p R x p R x x p R x x x p R
x x p R x x p R x p R x p R x p R x x x x p R x p R x x x p x +++-÷++-+-=+++++÷+++-=+++÷+++-=+++?+++÷+++-++
+++
=σσσσσσσσσσσσσσσσσσσ
σσ (6-41) P192 仿前,应用戴维南定理,根据图6-5(a)可求得G(p)函数如下:
D
F F D b F ad D F D
ad ad ad D R R p R x R x p x x x R x p x x x p G +++-+-=)()()()(2
22
(6-42) 同样,由式(6-32)和(6-33)可写出定子女轴磁链和交轴阻尼绕组电压的标么值方程为
Q
Q Q Q q aq Q Q Q Q
aq q q q i R i x i x D i R D i x i x ++=+=+=)(0ψψ
取拉氏变换后的运算式为
)
()()(0)
()()(p i p
R x p i x p i x p i x p Q Q Q q aq Q aq q q q +
+=+=ψ (6-43)
相应的交轴等效电路如图6-6,图中aq Q Q aq q x x x x x x -=-=σσ, 由等效电路可导出交轴电抗函数为
Q
Q aq q Q
Q aq
q R p x p
x x p R x x x p x +-
=+
++
=2111)(σσ (6-44)
在复频域中∞=p 相当于时域中t=0,故将式(6-41)或图6~5(a)中∞=p ,即得直轴次暂态电抗为 P193
σσσD F ad d x x x x x 1111
'
'+
++
= (6-45)
如转子上无阻尼绕组,则相当于∞=D R ,阻尼绕组开路,从而得直轴暂态电抗为
σ
σQ ad d x x x x 1
11'++
= (6-46)
将式(6-44)或图6-6中∞=p ,即得交轴次暂态电抗为 σ
σQ aq q x x x x 111'
'++
= (6-47)
二、用时间常数表示的电抗函数.
电抗函数刀)(p x d 和)(p x q 也常用与励磁绕组和阻尼绕组有关的时间常数表示,当转子上装有阻尼绕组时,由式(6-41)经推导可得
)
1)(1()1)(1()('
'0'0'''d d d d d d T pT pT pT x p x ++++= (6-48) 式中直袖暂态时间常数)(1
'
'
σ
σσx x x x x R T T ad ad F F F d ++=
≈; 直轴次暂态时间常数)1111(1'
'σ
σσx x x x R T F ad D D
d +++≈
;
电枢绕组开路时直轴暂态时间常数)(1
'
0σF ad D
F d x x R T T +=
≈, 电枢绕组开路时直轴次暂态时间常数)(1
'
'0σ
σσF ad F ad D D d x x x x x R T ++≈
。这些时间常数可由图6-5同步电机简化直轴等效电路写出. P194 同理司导出交轴电抗函数q
q q
q pT pT x p x ++=11)('' (6-49)
式中交轴阻尼绕组的时间常数Q
Q q R x T =
0;
交轴次暂态时间常数)(1
''σ
σσx x x x x R T aq aq Q Q q
++=。 三、电抗函数的倒数
在求解同步电机暂态问题时,常用到直轴和交轴电抗函数的倒数
)
(1
)(1p x p x q d 和;
由式(6—48)可知)
1)(1()
1)(1(1)(1'
''''0'0d d d d d d pT pT pT pT x p x ++++-= 将上式展成部分分式经推导可得
''''''''''1)1
1(1)11(1)(1d d d d d d d d d d pT pT x x pT pT x x x p x +?-++-+= (6-50) 同理,可推导得'
'''''1)1
1(1)(1q
q q q q q pT pT x x x p x +-+= (6-5l) P195
6—4同步电机的异步运行
同步电机在下列一些情况下,也会在异步转速下运行:
(1)同步发电机并网时,在整步阶段,转子转速通常与同步转速有微小差别; (2)同步电动机和同步调相机的异步起动;
(3)同步发电机的失励运行。这是电力系统常见的 P195
故障之一,本节主要研究这个问题。
同步发电机失励的原因,!一般是由于励磁回路开路或短路造成的。由于转子磁场消失,电磁转矩减小,而原动机的驱动转矩未变,过剩转矩使转子加速,转速n 将超过同步速n1,这时发电机转入异步运行状态,定子旋转磁场与转子
间存在着转差,通常用转差率11n n
n s -=表示。由于n>n 1
,s<0。
汽轮发电机由于转子是整体的,能在较小的]s 下(s <0.01—0.02)产生相当大的异步转矩,故这种电机可以在失励情况下短时运行。无阻尼绕组的水轮发电机不能产生足够大的异步转矩;有阻尼绕组的水轮发电机,由于阻尼绕组容量不大,一般在s =0.03一0.05才能产生较大的异步转矩,而此时阻尼绕组感生的电流已很大,有使转子过热的危险,所以水轮发电机一般不允许失励运行。汽轮发电机失励异步运行允许的时间和功率,受到下列因素的限制:首先要考虑定子和转子温升是否超过允许值,因为失励时定子无功电流增大,而在异步运行中,在转子表面和转子绕组感生的电流所引起的损耗,可能大于正常的励磁损耗;其次,由于转子的电磁不对称所产生的脉振转矩将引起机组和基础的振动。还要考虑电网能否供给足够的无功功率,因为失励的发电机要从原来送出感性无功功率转为吸收感性无功功率,这样,在电网无功功率不足时,将造成电网电压大幅度下降。这些因素很可能危及机组及整个系统的安全稳定运行。因此,汽轮发电机异步运行时间的长短和能送出多少功率,只能根据发电机的型号、参数、转子电路型式和电网的芬量、性质等进行具体分析,才能确定。本节主要分析汽轮发电帆失励异步运行时的基本方程、电流、转矩和功率。 P196
一、同步电机异步运行的基本方程
同步机异步运行时,,1)(*s w w w w w w w b
b b b -=--==按式(6-31)可写出其电压标么值方程(下标.省去)为
d
q d
d q d d d q d
d q d d Ri s dt d Ri w dt d u Ri s dt
d Ri w dt d u +-+=++=+--=+-=
ψψψψψψψψ)1()1( (6-52)
设电网三相电压标么值为
)
120cos()120cos(cos 00+=-==t U u t U u t
U u c b a
其综合矢量U (在任意瞬时亡)如图6-7。又异步稳定运行时的s 为恒值,d 轴对a 轴的角位移为 0)1(θθ
+-=t s (6-53)
由此得出U 与d 轴间的相角为0θθ-=-st t 。 于是d p 的电压为
)sin()
cos(00θθ-=-=st U u st U u q d (6-54)
可见儿d u 和q u 为转差频率的正弦电 压,所以稳定异步运行可用复数来运 算。
]
Re[]Re[]Re[]
Re[]Re[]Re[)
()(00jst
q jst st j d jst d jst st j d e U e U j jUe
u e U Ue Ue u =-=-====--θθ(6-55) P (197)
式中定义0
θj d Ue
U U -==,U j U q -=。相应的d 、q 的电流和磁莲可写成
],Re[jst e I i d d = ],Re[jst
e I i q q =
],Re[jst
e d ψψ= ],Re[jst e q q ψψ= (6-56)
先假定励破绕组短接,则u f =0,将式(6-55)、 (6-56) 代入式(6-52),经整理消去e jst
‘后可得电压复数方程为
]
)()1()([)1(])()1()([)1(d d q q d q d q q d d d q d I js x s I js jsx R I R s js U j I js x s I js jsx R I R s js U --+=+-+=---+=+--=ψψψψ (6-57)
式中d
d d
I js x )(=ψ和q
q q I js x )(=ψ可由图6—5和图6—6将
0=F ψ得出,在图个的复变量p 这里用js 代替。因在异步运行 中, d 抽和Q 轴备量都是角额卒标么值为s 的正弦量,故可
以这样表示。 联解式(6-57)得
)]}()([*2121)()(/{][))(21()]}
()([2121)()(/{))(21(22js x js x j s
sR s R js x js x U j U js jx s R I js x js x j s sR s R js x js x U js jx s R I q d q d d q q d q d q d +-+-+---=+-+-+--= (6-58)
把解出的d I 和q I 分成实部和虚部,又把d ψ和q ψ少,也分成 P198 实部和虚部,即
jH
G jF E jD
C I jB A I q d q d +=+=+=+=ψψ,, (6-59)
这样,由式(6—56),相应的瞬时值可写成
st
H st G e st F st E e st
D st C e I i st B st A e I i jst d d jst d d jst q q jst d d sin cos ]Re[sin cos ]Re[sin cos ]Re[sin cos ]Re[-==-==-==-==ψψψψ (6-60)
将上式代入式(6-35),整理后可求得电磁转炬的瞬时 值为
]
2sin )(2cos )()[(2
1
st CF DE AH BG st AG DF BH CE BH AG DF CE i i T d
q q d m --++--++--+=-=ψψ (6-61) 上式表明,电磁转矩中除第一项是平均转矩)(av m T ,外,后
两项为随着时间以两倍的转差频率脉振的转矩其复制,其幅值为)2(s m T 。
由式(5-55)可知三相绕组电压和电流中不含零序分量的瞬时功率为
*),Re(2
3
I U ,由此可推知没有中线电流的同步电机的无功功率为][(2
3
)])([(23*)
(23
)*(2
3
*)(23q d d q m q d q d m w w m jwt w jwt w m m i u i u I ji i ju u I I U I e I e U I I U I Q -=-+==
==- (6-62) P199
式中U 、I 的复平面在定于上,而x U 、w I 的复平面在转子 上,以角速度w 旋转。又式中所有量均为实部值,当用标么 值并省去下标符号*,则可改写成 q d d q i u i u Q -= (6-63)
由式(6-55),假定bj a U +=,则d U 、q U 可写成
st a st b st j st jb a j e U j u st b st a st j st jb a e U u jst
d jst d sin cos )]sin )(cos (Re[]Re[sin cos )]sin )(cos Re[(]Re[+=++-=-=-=++== (6-64)
将上式及式(6—60)的前面分式代入式(6—63),可得
st aD bC bB aA st bD aB aC bA bD aC aB bA st D st C st b st a st B st A st a st b Q 2sin )(2
1
2cos )(21)(2
1
)sin cos ()sin cos ()sin cos )(sin cos (++-+++-+
---=
----+= (6-65) 上式表明汽轮发电机在异步运行时,无功功率瞬时值除了平均无功功率av Q 以为,还有以两倍的转差频率脉振的无功功率。 以下着重分析平均电磁转矩的功率
二、励磁绕组短路异步运行时的电磁转矩和功率 1.电磁转拒和有功功率
平均电磁转短由式(6-61)并应用式(6-59)可写成
*)*Re(21
)(21)(a q q d av m I I BH AG DF CE T ψψ-=--+= (6-66) P200
对中、大型同步发电机,由于定子电阻标么位很小,可将其略去不计。从而将d I 、
q I 和电磁转矩表达式可大为简化,物理概念也比较清楚。为此,在式(6-58)中令R=0,化简后得
)
()(js x U I js x U j I q q d d -=
-= (6-67)
利用上式可求得
U
I js x U j I js x q q q d d d -==-==)()(ψψ (6-68)
将以上关系代入式(6-66)后,留意2*U U U =并经复数变换,可得不计R 的)(av m T 表达式为
)*
)(*)((2)*)(*)(Re(222)
(js x j
js x j I U js x j js x j U T d q m d q av m +=+= (6-69) 稳定异步运行时的直轴和交轴电抗函数倒数,只要把式(6-50)和(6-51)中的
p 用js 代替后即得
"
1"
)1
"1(1)(1"1")'1
"1('1')1'1(1)(1q q q q q q d d d d d d d d d d jsT jsT x x x js x jsT jsT x x jsT jsT x x x js x +-+=+-++-+=(6-70)
将上两分式代入式(6—69),经整理推导出虚部后即可得
])
"(1")'1
"1()"(1")'1"1()'(1')1'1[(22
222)
(q q q q d d d d d d d d av m sT sT x x sT sT x x sT sT x x U T +-++-++-=(6-71) P210 上式表明,同步电机稳态异步运行时的平均电磁转矩)(av m T ,可分为三项:第一项为励磁绕组中感应电流产生的转矩,第二和第三项分别为直轴和交轴阻尼绕组
电流产生的转矩。又由于s<0,以上三项计算结果都将是负值,!这就明确地表明)(av m T ,是制动转矩。
对大型汽轮发电机,定子绕组电阻可忽略不计,因而电磁功率约等于输出功率。由于异步运行时电磁功率等于电磁转矩与同步角速度的乘积,且同步角速度韵标么值等于1,因而电磁转矩的标么值也就是电磁功率的标么值,也约等于输出功率的标么值,所以上式也可用来表示输出的有功功率。
2.无功功率
励磁绕组短路异步运行时同步发电机的无功功率平均值可按式(6—65)并应用式(6-59)和式(6—64)归纳写成
*)(Im 2
1
)(21q d I j I U bD aC aB bA Qav +=---=
用式(6-67)和(6-70)代入上式可推导得
2
22
222222)"(1)"()'1"1()"(1)"()'1"1()"(1)"()'1"1(]'1)'()1'1()11[(Im 2]"
1")'1"1(1"1")'1"1(]'1')1'1(1[Im 2)]*
)(**)([(Im 21)*(Im 21q q q q d d d d d d d d d d d d q d d d q q q d d d d d d d d d q d q d sT sT x x sT sT x x sT sT x x jsT sT x x x x j U jsT jsT x x x jsT jsT x x jsT jsT x x x j U js x U j js x U j U I j I U Qav +-++-++-+---++=---+---+---++=+=
(6-72) P202
三,励磁绕组开路异步运行时的电磁转矩和功率
1、电磁转矩和有功功率
由励磁绕组开路,汽轮发电机的转子可近似看成是对称的,此时脉振转矩已不存在。至于平均电磁转矩则由于可近似认为:q d x x =,d d x x =',""q d x x =,0=d T ,
""q d T T =、故式(6-71)可化简写成
2
2)()"(1")'1
"1(
q d d q av m sT sT x x U T +-= (6-73) 上式也就是电磁功率的标么值,也约等于输出功率的标么值,理由已见前述
2、无功功率
将励磁绕组开路时参数的近似关系q d x x =,d d x x =',""q d x x =,0=d T ,
""q d T T =代入式(6-72)可求出平均无功功率表达式为
2
2
2
)"(1)"()1"11(q d d q d av sT sT x x x U Q +-+= (6-74) 203页
3、定子电流
将上述的参数近似关系代入式(6-70)可得
)
(1
"1")1"1(1)(1js x sT sT x x x js x q q d d q d d =+-+= 再利用式(6—67)的关系可得q d I j I =。令βj d d e I I =则由坐标土换关系及式(6-56)可写出
)
cos(])1sin[cos()90cos(])1cos[cos()cos(sin cos 000
0βθθβθβθ
θ-+=+----+--=-=t I t s st I t s st I i i i d d d q d a
因此,d a I I =。由式(6-67)和(6-49)得
)"1()1(1''1)
()(q d q q
q q q d d jsT x jsT U j jsT jsT x U
j js x U
j js x U j I ++-=++-
-=
-=
-= (6-75)
由上式取模数,可得励磁绕组开路异步运行时定子电流有效倍近似地山下式决定
2
20)
"(1)(1q q d
sT sT x U I ++=
(6-76)
在推导过秆中应注意:式(6-49)中的复变量p 在这里用js 替代礼上式中
Q
D Q q R x
R x T ==
00在本节里,定量间以两倍转差频率脉振的电磁转矩和功率,可由式(6--61)和(6-65)按相似的方法导出,计算较繁,限于篇幅,不—一缕述。
204页
6—5同步电机的小值振荡
同步机运行中,由于某些原因,如励磁调节器及调速器等的设计或校验不当,原动机或负载转矩不均匀,以及负载不对称等,都可能引起振荡现象。发生振荡时,电机的转速、电流、电压,功率以及转矩等,都不是恒值,振荡严重时可能使电机本身及电力系统都受到破坏。因此了解同步机的振荡现象并进而采取预防措施,如装设阻尼绕组,加大转动惯量以及装置保护设备等,具有重要的实际意义。根据同步电机振荡发生的原因的不同,一般分为自由振荡和强迫振荡两类。 同步机振荡时的基本方程是非线性的,它的转速非恒值,要用后面第八章讲的方法求解。本节着重用线性化的方法分析同步电机的稳态小振荡,就是转速在同步转速附近作周期性变化的小值振荡。当同步发电机与无穷大电网并联输出电流为零时,转子d 轴以同步速度旋转,以该轴线位置作为同步旋转参考轴的位置,称为同步钮。当并网发电机输出一定电流以同步速稳定运行时,转子d 轴将从同步轴移前一定的功角6。。而当发生小值振荡时,转子d 轴相对于同步轴的δ角将围绕δ。作周期性的小值变化,假定此变化的函数为t m λδδδδδsin 00+=?+=(6一77)上式m δ为稳态小振荡时的振幅,其值当然是很小的,丸为电机振荡的角频率,其标么值一般在0与0.05之间(0.02相当于每秒振荡一个周期)。上式的简化假定主要是为了分析方便,因为这样便可写出增量的复数代数方程,从而计算出复数的解答。实际振荡 205页
现象可能比这种假定要复杂得多,但由于振荡具有周期性.因此,总可将幕分解为适当的谐准形式,而就其某一谐波而言,这个假定的函数仍是合理的。当发生小值振荡时,转子d 轴与定子。相绕组轴线间的夹角为
t t t t m λδδθδδθδθθsin 00000?+++=?+++=++= (6-78)
于是
s t dt d dt d m +=?+=?+=1cos 11λδλδθ (6-79) 式中t dt
d s m λδλδ
cos ?=?=做电机的瞬时转差率。这里假定电机瞬时转速超过同步速时,s 为正。
一、同步电机小值振荡的基本方程
同步电机练习题及标准答案
第六章 同步电机 一、填空 1. ★在同步电机中,只有存在 电枢反应才能实现机电能量转换。 答 交轴 2. 同步发电机并网的条件是:(1) ;(2) ;(3)。 答 发电机相序和电网相序要一致,发电机频率和电网频率要相同,发电机电压和电网电压大小要相等、相位要一致 3. ★同步发电机在过励时从电网吸收 ,产生 电枢反应;同步电动机在过励时向电网输出,产生 电枢反应。 答 超前无功功率,直轴去磁,滞后无功功率,直轴增磁 4. ★同步电机的功角δ有双重含义,一是和之间的夹角;二是 和 空间夹角。 答 主极轴线,气隙合成磁场轴线,励磁电动势,电压 5. 凸极同步电机转子励磁匝数增加使q X 和d X 将 。 答 增加 6. 凸极同步电机气隙增加使q X 和d X 将 。 答 减小 7. ★凸极同步发电机与电网并联,如将发电机励磁电流减为零,此时发电机电磁转矩为 。 答 δs i n 2)X 1 X 1( mU d q 2 - 二、选择 1. 同步发电机的额定功率指( )。 A 转轴上输入的机械功率; B 转轴上输出的机械功率; C 电枢端口输入的电功率; D 电枢端口输出的电功率。 答 D 2. ★同步发电机稳态运行时,若所带负载为感性8.0cos =?,则其电枢反应的性质为( )。 A 交轴电枢反应; B 直轴去磁电枢反应; C 直轴去磁与交轴电枢反应; D 直轴增磁与交轴电枢反应。 答 C 3. 同步发电机稳定短路电流不很大的原因是( )。 A 漏阻抗较大; B 短路电流产生去磁作用较强; C 电枢反应产生增磁作用; D 同步电抗较大。 答 B 4. ★对称负载运行时,凸极同步发电机阻抗大小顺序排列为( )。 A q aq d ad X X X X X >>>>σ; B σX X X X X q aq d ad >>>>;
三相交流异步电动机动态模型仿真
课程名称:电力传动与控制 学院:电控学院 专业:导航、制导与控制姓名:马生涛 学号:2015132040 指导教师:王飚 完成时间:2016-7-18
摘要 交流异步电动机是一个高阶非线性、强耦合的多变量系统,如果忽略其非线性、多变量、强耦合的条件,近似求出线性单变量动态结构,然后采用直流调速系统的分析及设计方法得到的控制系统动态性能往往不高。要设计具有优良动态性能的异步电动机调速系统,必须要了解异步电动机动态数学模型。为了使分析简化,常采用坐标变换的方法加以改造。本文在此基础上利用仿真软件MATLAB/SIMULINK建立一个通用的仿真模型。
目录 1 引言 (4) 2 三相异步电动机动态数学模型 (4) 2.1 异步电动机动态数学模型 (6) 2.2 坐标变换 (8) 2.3 三相-静止两相变换(3s/2s变换) (9) 2.4 静止两相-旋转正交变换(2s/2r变换) (10) 2.5 静止两相坐标下的动态数学模型 (12) 2.6 旋转正交坐标下的动态数学模型 (13) 3 三相异步电动机仿真模型建立 (14) 4 仿真分析 (18) 4.1 电动机空载启动和空载运行有关特性曲线 (18) 4.2电动机带负载起动运行有关特性曲线 (19) 5结语 (19)
1 引言 稳态数学模型的异步电动机调速系统虽然能够在一定范围内实现平滑调速,然而,对于高动态性能的对象,稳态数学模型就不满足要求了,因此对于的异步电动机的动态数学模型的设计就很有必要,但是由于异步电动机的非线性,强耦合以及多变量性,必须设计一套高动态调速系统,为了使分析简化,采用坐标变换的方法设计出简化动态数学模型,并用MATLAB进行仿真实现。 2 三相异步电动机动态数学模型 (1) 异步电机变压变频调速时需要进行电压和频率的协调控制,有电压和频率两种独立的输入变量。在输出变量中,除转速外,磁通也得算一个独立的输出变量。因为电机只有一个三相输入电源,磁通的建立和转速的变化是同时进行的,为了获得良好的动态性能,也希望对磁通施加某种控制,使它在动态过程中尽量保持恒定,才能产生较大的动态转矩。由于这些原因,异步电机是一个多变量(多输入多输出)系统,而电压(电流)、频率、磁通、转速之间又互相都有影响,所以是强耦合的多变量系统,可以先用下图来定性地表示: 图1 异步电机的多变量、强耦合模型结构 在异步电机中,电流乘磁通产生转矩,转速乘磁通得到感应电动势,由于它
同步电动机的起动分析
同步电动机的起动 1.同步电机的基本原理 同步发电机和其它类型的旋转电机一样,由固定的定子和可旋转的转子两大部分组成。一般分为转场式同步电机和转枢式同步电机。 图1.1给出了最常用的转场式同步发电机的结构模型,其定子铁心的内圆均匀分布着定子槽,槽内嵌放着按一定规律排列的三相对称交流绕组。这种同步电机的定子又称为电枢,定子铁心和绕组又称为电枢铁心和电枢绕组。 转子铁心上装有制成一定形状的成对磁极,磁极上绕有励磁绕组,通以直流电流时,将会在电机的气隙中形成极性相间的分布磁场,称为励磁磁场(也称主磁场、转子磁场) 气隙处于电枢内圆和转子磁极之间,气隙层的厚度和形状对电机内部磁场的分布和同步电机的性能有重大影响。 除了转场式同步电机外,还有转枢式同步电机,其磁极安装于定子上,而交流绕组分布于转子表面的槽内,这种同步电机的转子充当了电枢。图中用AX、BY、CZ三个在空间错开120 分布的线圈代表三相对称交流绕组。 图1.1同步电机结构模型 1.1工作原理 主磁场的建立:励磁绕组通以直流励磁电流,建立极性相间的励磁磁场,即建立起主
磁场。 载流导体:三相对称的电枢绕组充当功率绕组,成为感应电势或者感应电流的载体。 切割运动:原动机拖动转子旋转(给电机输入机械能),极性相间的励磁磁场随轴一起旋转并顺次切割定子各相绕组(相当于绕组的导体反向切割励磁磁场)。 交变电势的产生:由于电枢绕组与主磁场之间的相对切割运动,电枢绕组中将会感应出大小和方向按周期性变化的三相对称交变电势。通过引出线,即可提供交流电源。 感应电势有效值:每相感应电势的有效值为E0 =4.44fNψ Φ 感应电势频率:感应电势的频率决定于同步电机的转速n和极对数p ,即 f=pn/60 交变性与对称性:由于旋转磁场极性相间,使得感应电势的极性交变;由于电枢绕组的对称性,保证了感应电势的三相对称性。 1.2同步转速 同步转速从供电品质考虑,由众多同步发电机并联构成的交流电网的频率应该是一个不变的值,这就要求发电机的频率应该和电网的频率一致。我国电网的频率为50Hz ,故有: n=60f/p=3000/p 要使得发电机供给电网50Hz的工频电能,发电机的转速必须为某些固定值,这些固定值称为同步转速。例如2极电机的同步转速为3000r/min,4极电机的同步转速为1500r/min,依次类推。只有运行于同步转速,同步电机才能正常运行,这也是同步电机名称的由来。 1.3运行方式 同步电机的主要运行方式有三种,即作为发电机、电动机和补偿机运行。作为发电机运行是同步电机最主要的运行方式,作为电动机运行是同步电机的另一种重要的运行方式。同步电动机的功率因数可以调节,在不要求调速的场合,应用大型同步电动机可以提高运行效率。近年来,小型同步电动机在变频调速系统中开始得到较多地应用。同步电机还可以接于电网作为同步补偿机。这时电机不带任何机械负载,靠调节转子中的励磁电流向电网发出所需的感性或者容性无功功率,以达到改善电网功率因数或者调节电网电压的目的。 分析表明,同步电机运行于哪一种状态,主要取决于定子合成磁场与转子主极磁场之间的夹角δ,δ称为功率角。
同步电机习题与解答
同步电机习题与答案 6.1 同步电机的气隙磁场,在空载时是如何激励的?在负载时是如何激励的?[答案见后] 6.2 为什么大容量同步电机采用磁极旋转式而不采用电枢旋转式? [答案见后] 6.3 在凸极同步电机中,为什么要采用双反应理论来分析电枢反应? [答案见后] 6.4 凸极同步电机中,为什么直轴电枢反应电抗X ad大于交轴电枢反应电抗 X aq? [答案见后] 6.5 测定同步发电机的空载特性和短路特性时,如果转速降为原来0.95n N,对试验结果有什么影响? [答案见后] 6.6 一般同步发电机三相稳定短路,当I k=I N时的励磁电流I fk和额定负载时的励磁电流I fN都已达到空载特性的饱和段,为什么前者X d取不饱和值而后者取饱和值?为什么X q一般总是采用不饱和值? [答案见后] 6.7 为什么同步发电机突然短路,电流比稳态短路电流大得多?为什么突然短路电流大小与合闸瞬间有关? [答案见后] 6.8 在直流电机中,E>U还是U>E是判断电机作为发电机还是作为电动机运行的依据之一,在同步电机中,这个结论还正确吗?为什么?
[答案见后] 6.9 当同步发电机与大容量电网并联运行以及单独运行时,其cosφ是分别由什么决定的?为什么? [答案见后] 6.10 试利用功角特性和电动势平衡方程式求出隐极同步发电机的V形曲线。[答案见后] 6.11 两台容量相近的同步发电机并联运行,有功功率和无功功率怎样分配和调节? [答案见后] 6.12 同步电动机与感应电动机相比有何优缺点? [答案见后] 6.13 凸极式同步发电机在三相对称额定负载下运行时,设其负载阻抗为R+jX,试根据不考虑饱和的电动势相量图证明下列关系式 [答案见后] 6.14 试述直流同步电抗X d、直轴瞬变电抗X′d、直轴超瞬变电抗X"d的物理意义和表达式,阻尼绕组对这些参数的影响? [答案见后] 6.15 有一台三相汽轮发电机,P N=25000kW,U N=10.5kV,Y接法,cosφN=0.8(滞后),作单机运行。由试验测得它的同步电抗标么值为X*t=2.13。电枢电
同步电动机经常出现的故障及原因分析(通用版)
Safety is the goal, prevention is the means, and achieving or realizing the goal of safety is the basic connotation of safety prevention. (安全管理) 单位:___________________ 姓名:___________________ 日期:___________________ 同步电动机经常出现的故障及原 因分析(通用版)
同步电动机经常出现的故障及原因分析(通 用版) 导语:做好准备和保护,以应付攻击或者避免受害,从而使被保护对象处于没有危险、不受侵害、不出现事故的安全状态。显而易见,安全是目的,防范是手段,通过防范的手段达到或实现安全的目的,就是安全防范的基本内涵。 经常发现的故障现象有: ①定子铁芯松动,运行中噪声大。 ②定子绕阻端部绑线崩断,绝缘蹭坏,连接处开焊,导线在槽口处端点断裂引起短路。 ③转子励磁绕组接头处产生裂纹、开焊绝缘局部烧焦。 ④转子线圈绝缘损伤,起动绕组笼条断裂。 ⑤转子磁极的燕尾楔松动、退出。 ⑥电刷滑环松动,风叶断裂等故障。 以上故障现象有的出现在同步电动机仅运行2—3年内,甚至半年内。一般认为是电动机制造质量问题。但许多电机制造厂,虽对制造工艺中的关键部位加强措施,但没有明显效果,故障现象仍然屡屡发生。 通过对同步电动机及励磁装置运行数据进行数理统计分析,对电
动机起动,投励运行中的各种典型状态波形摄片,研究分析表明,同步电动机出现上述故障,不是制造问题,而是传统励磁技术存在缺陷。 XX设计有限公司 Your Name Design Co., Ltd.
三相感应电机仿真
三相感应电动机起动动态过程仿真软件的开发及应用
摘 要:本文利用MATLAB 语言强大的计算功能和计算结果可视化功能,对电动机起动动态过程进行仿真软件的开发,通过对一台投入使用中的电机进行起动动态过程的仿真,并对其结果进行分析。 关键词:感应电动机,软件开发,动态仿真 Abstract : Using the calculating and consequence visualization functions of MATLAB ,this article developed a simulation softwares for start dynamic processes of motor ,simulated dynamic processes for one working motors and analysised the consequences. Key words : Induction Motor ,Software Development , Dynamic Analysis 随着科学技术的不断发展,电机已成为提高生活效率和科技水平以及提高生活质量的主要载体之一,这就要求我们对电机的运行特性有进一步的了解与掌握。本文主要针对感应电动机的起动动态过程进行仿真软件开发及仿真。 1 仿真软件开发 将电机的数学模型与MATLAB 语言的功能相结合,来编制电机在起动工况下的动态仿真软件。在simulink 中建立感应电机的仿真模型,随后在MATLAB 的工作空间调用龙格-库塔函数,即可得到电机在起动条件下的仿真结果,再应用plot( )命令,得到感应电机的起动仿真曲线。仿真程序流程图如图1所示。 对仿真软件的开发,主要可分为以下几个步骤: 1.1参数的选定 为了编制程序的方便(包括界面可视性效果)及验证程序的正确性,首先选定一台由我公司制造的已知电机作为原型机,用其参数进行仿真软件的开发及模拟。 输入的参数包括:额定功率1800=N P KW ,额定转速1491/min N n r =,定子绕组接线系数0=k (星接),定子绕组相电 阻Ω=08999.0s R ,转子绕组相电阻Ω=10999.0r R ,定子绕组相漏抗Ω=0858.0ls X ,转 子 绕 组 相 漏 抗 Ω=1405.0lr X ,定 子 绕 组 激 磁 电 抗 Ω=2895.3m X ,转子外径m D 65.02=,铁芯 长m L t 83.0=,转动惯量24.113m Kg J m ?=,旋转阻力系数rad s m N Roma /0225.0??=,定子绕组每相串联匝数1801=ω,定子绕组系数936.01=ωK ,转子槽数472=Z ,电机极对数 2=p ,额定电压V U N 6000=,频率Hz f 50=。 输出的数据包括:不同的时间t 时,定、转子的三相电流A i 、B i 、C i 、a i 、b i 、c i ; 转子导条电流、电机转速及电磁转矩等数据。
同步电动机常见启动故障分析及处理
同步电动机常见启动故障分析及处理 摘要:同步电动机能否顺利启动,不仅影响到同步电动机自身的安全,还影响到生产系统,为了快速、准确的发现故障、排除故障,对同步电动机常见的启动故障分析就显得非常必要。文章结合维修实践,分析了同步电动机常见启动故障,并给出了具体的处理措施,为今后同步电动机启动故障的维修提供了方法,具有一定的参考价值。 0 引言 同步电动机由于其功率因数高,运行效率高,稳定性好,转速恒定等优点广泛应用于工业生产中。熟悉同步电动机启动故障,并及时排除故障,对电 动机本身及生产系统都具有现实意义,为了能及时、准确排除故障,必须对 同步电动机常见故障进行详细的分析。 1 常见故障 1)同步电动机通电后,不能启动。 同步电动机接通电源后,不能启动和运行,一般有以下几方面的原因:(一)电源电压过低,由于同步电动机启动转矩正比于电压的平方,电源电压过低,使得电机的启动转矩大幅下降,低于负载转矩,从而无法启动,对此,应提高电源电压,以增大电机的启动转矩。(二)电动机本身的故障检查电动机定、转子绕组有无断、短路,开焊和连接不良等故障,这些故障都使电机无法建立起额定的磁场强度,从而电动机无法启动;检查电动机轴承有无损坏,端盖有无松动,如果轴承损坏或端盖松动,造成转子下沉,与定子铁心相擦,从而导致电机无法启动。对定、转子绕组故障可用低压摇表,逐步查找,视具体情况,采取相应的处理方法,对轴承和端盖松动故障,每次开车前都应盘车,看电动机转子转动是否灵活,如轴承(或轴瓦)损坏,应及时更换。(三)控制装置故障此类故障多为励磁装置的直流输出电压调整不当或无输出,造成电动机的定子电流过大,致使电机过流保护动作或引起电机的失磁运行,此时,检查励磁装置的输出电压、电流是否正常,电压、电流波形是否正常,如电压或电流波形不正常,为了节省时间,更换备用触发板。(四)机械故障如被拖动的机械卡住,
第六章同步电机的稳态分析
第六章 同步电机的稳态分析 6-4 同步发电机电枢反应的性质取决于什么?交轴和直轴电枢反应对同步发电 机的运行有何影响? 答:同步发电机电枢反应的性质取决于电枢磁动势和主磁场在空间的相对位置,即激磁电 动势0? E 和负载电流? I 之间的相角差0ψ。交轴电枢反应产生交轴电枢磁动势,与产生电磁转矩及能量转换直接相关;直轴电枢反应产生直轴电枢磁动势,起到增磁或者去磁的作用,与电机的无功功率和功率因数的超前或滞后相关。 6-6 为什么分析凸极同步电机时要用双反应理论?凸极同步发电机负载运行 时,若0ψ既不等于 0,又不等于 90,问电枢磁场的基波与电枢磁动势的基波在空间是否同相,为什么(不计磁饱和)? 答:因为凸极电机的气隙不均匀,分析时需用双反应理论。当负载运行时,若0ψ既不等于 0,又不等于 90,电枢磁场的基波与电枢磁动势的基波在空间的相位不同,因为交、直轴的磁路不同,相同大小的磁势产生的磁通不同,如右图。 6-8 有一台70000KV A ,60000KW ,13.8KV ,(星形联结)的三相水轮发电机, 交直轴同步电抗的标幺值分别为,7.0,0.1==* *q d x x 试求额定负载时发电机的激磁电动势*0E (不计磁饱和与定子电阻)。 解:额定功率因数7 6 cos == N N N S P ? ,∴ 31=N ? 设 01∠=* ?U ,则 31 1-∠=* ?I 8.23486.17.03101∠=?-∠+∠=?+=* * ?*?*?j x I j U E q Q ∴ 8.23=N δ 8.548.23310=+=+=N N δ?ψ ) (sin )(00*********-?+=-+=q d Q q d d Q x x I E x x I E E ψ 731.1)7.00.1(8.54sin 486.1=-+= 6-15 有一台* d x =0.8, .0=*q x 5 的凸极同步发电机与电网并联运行,已知发电机 1 aq ad F ad B 1aq
同步电动机励磁系统常见故障分析
同步电动机励磁系统常见故障分析 作者:陆业志 本文结合KGLF11型励磁装置,对其在运行中的常见故障进行分析。 1 常见故障分析 (1)开机时调节6W,励磁电流电压无输出。 原因分析:励磁电流电压无输出,肯定是晶闸管无触发脉冲信号,而六组脉冲电路同时无触发脉冲很可能是移相插件接触不良,或者同步电源变压器4T损坏,造成没有移相给定电压加到六组脉冲电路的1V1基极回路上,从而六组脉冲电路无脉冲输出导致晶闸管不导通。 (2)励磁电压高而励磁电流偏低。 原因分析:这是个别触发脉冲消失或是个别晶闸管损坏的缘故。个别触发脉冲消失可能是脉冲插件接触不良。另外图1中三极管1V1、单极晶体管2VU及小晶闸管9VT损坏,或者是电容2C严重漏电或开路。如果主回路中晶闸管1VT~6VT中有某一个开路或是触发极失灵,同样会导致输出励磁电流偏低的现象。 (3)合励磁电路主开关时,励磁电流即有输出。 原因分析:这是由于图1所示脉冲电路中的三极管1V1集电极-发射极之间漏电,即使移相电路还未送来正确的控制电压,也会导致1C充电到2VU导通的程度。2VU即输出触发使小晶闸管9VT导通,2C经9VT放电而发出脉冲令1VT、3VT、6VT之一触发导通,使转子励磁电路中流过直流电流。 (4)同步电动机起动时,励磁不能自行投入。 原因分析:励磁不能自行投入。肯定是自动投励通道电路中断或工作不正常,因此可能是投励插件与插座间接触不良,或是图2所示投励电路中的三极管3V1、单结晶体管4VU工作不正常,电容5C漏电、电位器W′损坏。另外是移相插件同样有接触不良现象,或者是图3所示移相电路的小晶闸管10VT损坏等等。 (5)运行过程中励磁电流电压上下波动。 原因分析:引起励磁电流电压输出不稳的原因很多,主要有1)脉冲插件可能存在接触不良,造成个别触发脉冲时有时无。2)图1所示脉冲电路的电位器4W松动,使三极管1V1电流负反馈发生变化,造成放大器工作点不稳定,从而影响晶闸管主回路输出的稳定性。另外,如果电容2C漏电或单结晶体管2VU及三极管1V1性能不良,也会引起触发脉冲相位移动。3)图3所示移相电路的电位器6W松动或接触不良,将会使移相控制电压Ed间歇性消失,引起励磁电流电压输出大幅度波动。另外,如果稳压管7VS、8VS损坏,都会使Ey随电网电压波动而波动,使Ed输出波动,造成晶闸管主回路直流输出不稳。 (6)励磁装置输出电压调不到零位。
三相异步电动机的建模与仿真分解
运动控制论文 课题:异步电动机数学模型和电压空间矢量PWM控制技术研究 姓名:xxxxxxxxx 专业:电气工程及自动化 班级:电097 学号:0912002167 日期:2013年3月30日
摘要 由于直流调速的局限性和交流调速的优越性,以及计算机技术和电力电子器件的不断发展,交流异步电动机变频调速技术正在快速发展之中。目前广泛研究应用的交流异步电动机调速技术有恒压频比控制方式,矢量控制,直接转矩控制等。本论文中所讨论的异步电动机调速技术叫做空间矢量脉宽调制方法(SVPWM)。相对于直接转矩控制,它有可连续控制,调速范围宽等显著优点。 本文首先对交流异步电动机的数学模型的建立进行了详细的分析和阐述,通过对交流异步电动机的动态电磁关系的分析以及坐标变换原理概念的介绍,逐步引出了异步电动机的数学模型和在不同坐标系上的数学模型表达方程式,指出了异步电动机的模型特点是一多变量、强藕合的非线性系统。采用MATLAB /SIMULINK软件包,实现异步电动机动态数学模型的仿真。仿真研究显示,该方法简洁、方便、实时交互性强,能充分融合到其它控制系统中,并具有良好地扩展性。 其次阐述了异步电动机电压空间矢量PWM控制技术的原理和矢量变换方法实现的步骤,据交流电机坐标变换及矢量控制理论提出了异步电机在任意同步旋转坐标系下仿真结构图的建模设想,得出了一种按转子定向磁场下的动态结构图,利用该结构图可以方便的构成电机的仿真模型,进行仿真计算。然后运用MATLAB软件搭建模型进行仿真分析,结果表明电机有良好的稳、动态性能。 通过对仿真软件的应用也表明在进行复杂系统设计时运用仿真工具对设计进行仿真分析是行之有效的方法,可以提高系统设计效率,缩短系统设计时间,并能够较好的进行系统优化。经试验表明,空间电压矢量调制的方法正确可行, 可调高电压利用率和系统精度。 关键词:异步电动机;矢量控制;数学模型;仿真
同步电机知识分享
同步电机
第八章同步电机 8.1 同步电机原理和结构 1.同步发电机原理简述 (1)结构模型: 同步发电机和其它类型的旋转电机一样,由固定的定子和可旋转的转子两大部分组成。最常用的转场式同步电机的定子铁心的内圆均匀分布着定子槽,槽内嵌放着按一定规律排列的三相对称交流绕组。这种同步电机的定子又称为电枢,定子铁心和绕组又称为电枢铁心和电枢绕组。转子铁心上装有制成一定形状的成对磁极,磁极上绕有励磁绕组,通以直流电流时,将会在电机的气隙中形成极性相间的分布磁场,称为励磁 磁场(也称主磁场、转子磁场)。除了 转场式同步电机外,还有转枢式同步发 电机,其磁极安装于定子上,而交流绕 组分布于转子表面的槽内,这种同步电 机的转子充当了电枢。图8-1-1给出了 典型的转场式同步发电机的结构模型。 图中用AX、BY,CZ 共3个在空间错 开120°电角度分布的线圈代表三相对称 交流绕组。 (2)工作原理 同步电机电枢绕组是三相对称交流绕 图8-1-1 同步电机结构模型 组,当原动拖动转子旋转时,通入三相对 称电流后,会产生高速旋转磁场,随轴一起旋转并顺次切割定子各相绕组(相当于绕组的导体反向切割励磁磁场),会在其中感应出大小和方向按周期性变化的交变电势,每相感应电势的有效值为, E0=4.44f NФf k w (8-1-1) 式中f——电源频率;Фf——每极平均磁通; N——绕组总导体数;k w——绕组系数; E0是由励磁绕组产生的磁通Фf在电枢绕组中感应而得,称为励磁电势(也称主电势、空载电势、转子电势)。由于三相电枢绕组在空间分布的对称性,决定了三相绕组中的感应电势将在的时间上呈现出对称性,即在时间相位上相互错开1/3周期。通过绕组的出线端将三相感应电势引出后可以作为交流电 收集于网络,如有侵权请联系管理员删除
电机学答案第6章《同步电机》
第六章 同步电机 6.1 同步电机和异步电机在结构上有哪些区别? 同步电机:转子直流励磁,产生主磁场,包括隐极和凸极 异步电机:转子隐极,是对称绕组,短路,绕组是闭合的,定子两者都一样。 6.2 什么叫同步电机?怎样由其极数决定它的转速?试问75r/min 、50Hz 的电机是几极的? 同步电机:频率与电机转速之比为恒定的交流电机601f p n = ,1 606050 7540f n P ?= ==(极) 6.3 为什么现代的大容量同步电机都做成旋转磁极式? ∵励磁绕组电流相对较小,电压低,放在转子上引出较为方便,而电枢绕组电压高 ,电流大,放在转子上使结构复杂,引出不方便,故大容量电机将电枢绕组作为定子,磁极作为转子,称为旋转磁极式。 6.4汽轮发电机和水轮发电机的主要结构特点是什么?为什么有这样的特点? 气轮发电机:转速高,一般为一对极,min 3000r n =,考虑到转子受离心力的作用,为很好的固定励磁绕组,转子作成细而长的圆柱形,且为隐极式结构。转子铁心一般由高机械强度和磁导率较高的合金钢锻成器与转轴做成一个整体,铁心上开槽,放同心式励磁绕组。 水轮发电机:n 低,2P 较多,直径大,扁平形,且为立式结构,为使转子结构和加工工艺简单,转子为凸极式,励磁绕组是集中绕组,套在磁极上,磁极的极靴行装有阻尼绕组。 6.6 为什么水轮发电机要用阻尼绕组,而汽轮发电机却可以不用? 水轮发电机一般为凸极结构,为使转子产生异步转矩,即能异步起动,加阻尼绕组。 汽轮发电机一般为隐极结构,它起动时的原理与异步机相同,∴不必加起动绕组。 6.7 一台转枢式三相同步发电机,电枢以转速n 逆时针方向旋转,对称负载运行时,电枢反应磁动势对电枢的转速和转向如何?对定子的转速又是多少? 对电枢的转速为n ,为定子的转速为0,方向为顺时针。原因是:要想产生平均转矩,励磁磁势与电枢反应磁势必然相对静止,而现在励磁磁势不变。∴电枢反应磁势对定子也是相对静止的,而转子逆时针转,∴它必须顺时针转,方能在空间静止。 6.11 试述交轴和直轴同步电抗的意义。为什么同步电抗的数值一般较大,不可能做得很小?请分析下面几种情况对同步电抗有何影响? (1)电枢绕组匝数增加; (2)铁心饱和程度提高; (3)气隙加大; (4)励磁绕组匝数增加。 d X ,q X 表征了当对称三相直轴或交轴电流每相为1A 时,三相联合产生的总磁场(包 括在气隙中的旋转电枢反应磁场和漏磁场)在电枢绕组中每相感应的电动势气隙大,同步电抗大,短路比大,运行稳定性高,但气隙大或同步电抗小,转子铜量大,成本增加,∴同步电抗不能太小。d ad X X X σ=+ q aq X X X σ=+ (1)电枢绕组匝数增加,产生的直轴交轴电枢反应磁通增大,∴d X ,q X 增加,(∵ E N ∝∴,ad aq E E ↑电流不变,ad aq X X ↑)
变压器与远距离输电电路动态分析+Word版含解析
1.变压器联系着两个电路:原线圈电路、副线圈电路.原线圈在原线圈电路中相当于一用电器.副线圈在副线圈电路中相当于电源. 2.远距离输电示意图中涉及三个电路,在中间的远距离输电线路中升压变压器的副线圈、导线、降压变压器的原线圈相当于闭合回路的电源、电阻、用电器. 1.(多选)(2019·山东泰安市3月第一轮模拟)如图1,理想变压器原、副线圈分别接有额定电压相同的灯泡P和Q.当输入电压U为灯泡额定电压的8倍时,两灯泡均能正常发光.下列说法正确的是() 图1 A.原、副线圈匝数比为1∶7 B.原、副线圈匝数比为7∶1 C.此时P和Q的电功率之比为7∶1 D.此时P和Q的电功率之比为1∶7 2.(多选)(2019·四川广元市第二次统考)如图2所示,一小型发电机与理想变压器连接给两只完全相同的灯泡P、Q供电,电流表A为理想电表,线圈和导线的电阻不计,开关S闭合时两灯泡正常发光.保持其他条件不变,开关由闭合到断开.则() 图2 A.电流表的示数不变,P中电流的频率变为原来的2倍 B.电流表的示数变为原来的一半,P中电流的频率不变 C.带动发电机线圈转动的外力的功率变小,且P灯亮度不变 D.带动发电机线圈转动的外力的功率变大,且P灯变亮 3.(多选)(2020·广东深圳市调研)如图3所示,理想变压器原副线圈匝数之比为1∶2,正弦交流电源电压为U=12 V,电阻R1=1 Ω,R2=2 Ω,滑动变阻器R3最大阻值为20 Ω,滑片P 处于中间位置,则()
图3 A.R1与R2消耗的电功率相等 B.通过R1的电流为3 A C.若向上移动P,电源输出功率将变大 D.若向上移动P,电压表读数将变大 4.(多选)(2019·湖北4月份调研)如图4所示,理想变压器原、副线圈的匝数比为n1∶n2=2∶1,输入端接在u=302sin 100πt(V)的交流电源上,R1为电阻箱,副线圈连在电路中的电阻R=10 Ω,电表均为理想电表.下列说法正确的是() 图4 A.当R1=0时,电压表的读数为30 V B.当R1=0时,若将电流表换成规格为“5 V 5 W”的灯泡,灯泡能够正常发光 C.当R1=10 Ω时,电流表的读数为1.2 A D.当R1=10 Ω时,电压表的读数为6 V 5.(2020·重庆一中月考)调压变压器就是一种自耦变压器,它的构造如图5所示,线圈AB绕在一个圆环形的铁芯上,CD之间加上输入电压,当滑动触头P转动时,改变了副线圈匝数,从而调节输出电压.图中A为交流电流表,V为交流电压表,R1、R2为定值电阻,R3为滑动变阻器,C、D两端接恒压交流电源,变压器可视为理想变压器,则() 图5 A.当滑动变阻器滑片向下滑动时,电压表读数变大 B.当滑动变阻器滑片向下滑动时,电流表读数变小 C.当变压器滑动触头P逆时针转动时,M、N之间的电压变大 D.当变压器滑动触头P顺时针转动时,变压器输出功率变大 6.(2019·河南名校联盟高三下学期2月联考)在海外旅游时,某游客从J国带回一把标有“110 V60 Hz880 W”的电咖啡壶,该电咖啡壶利用电热丝加热.在我国,为使电咖啡壶能正常工作,需要通过变压器与市电相连.下列说法正确的是()
第六章 同步电机
第六章 同步电机习题课 一、填空 1. ★在同步电机中,只有存在 电枢反应才能实现机电能量转换。 答 交轴 2. 同步发电机并网的条件是:(1) ;(2) ;(3) 。 答 发电机相序和电网相序要一致,发电机频率和电网频率要相同,发电机电压和电网电压大小要相等、相位要一致 3. ★同步发电机在过励时从电网吸收 ,产生 电枢反应;同步电动机在过励时向电网输出 ,产生 电枢反应。 答 超前无功功率,直轴去磁,滞后无功功率,直轴增磁 4. ★同步电机的功角δ有双重含义,一是 和 之间的夹角;二是 和 空间夹角。 答 励磁电动势,电压,主极轴线,气隙合成磁场轴线 5. 凸极同步电机转子励磁匝数增加使q X 和d X 将 。 答 不变 6. 凸极同步电机气隙增加使q X 和d X 将 。 7. 答 减小 8. ★凸极同步发电机与电网并联,如将发电机励磁电流减为零,此时发电机电磁转矩为 。 答 2 1 q d m U 11( )s i n 2 2X X δ- Ω 二、选择 1. 同步发电机的额定功率指( )。 A 转轴上输入的机械功率; B 转轴上输出的机械功率; C 电枢端口输入的电功率; D 电枢端口输出的电功率。 答 D 2. ★同步发电机稳态运行时,若所带负载为感性8.0cos =?,则其电枢反应的性质为 ( )。 A 交轴电枢反应; B 直轴去磁电枢反应; C 直轴去磁与交轴电枢反应; D 直轴增磁与交轴电枢反应。 答 C 3. 同步发电机稳定短路电流不很大的原因是( )。 A 漏阻抗较大; B 短路电流产生去磁作用较强; C 电枢反应产生增磁作用; D 同步电抗较大。 答 B 4. ★对称负载运行时,凸极同步发电机阻抗大小顺序排列为( )。
基于Matlab的交流电机矢量控制系统仿真..
基于MATLAB交流异步电机矢量控制系统建 模与仿真 摘要:在分析异步电机的数学模型及矢量控制原理的基础上,利用MATLAB,采用模块化的思想分别建立了交流异步电机模块、逆变器模块、矢量控制器模块、坐标变换模块、磁链观测器模块、速度调节模块、电流滞环PWM调节器,再进行功能模块的有机整合,构成了按转子磁场定向的异步电机矢量控制系统仿真模型。仿真结果表明该系统转速动态响应快、稳态静差小、抗负载扰动能力强,验证了交流电机矢量控制的可行性、有效性。 关键词:交流异步电机,矢量控制,MATLAB 一、引言 交流电动机由于动态数学模型的复杂性,其静态和动态性能并不是很理想。因此在上世纪前期需要调速的场合下采用的都是直流电动机,但是直流电动机结构上存在着自身难以克服的缺点,导致人们对交流调速越来越重视。从最初的恒压频比控制到现在的直接转矩控制和矢量控制,性能越来越优良,甚至可以和直流电机的性能相媲美。 本文研究交流异步电机矢量控制调速系统的建模与仿真。利用MATLAB中的电气系统模块构建异步电机矢量控制仿真模型,并对其动、静态性能进行仿真试验。仿真试验结果验证了矢量控制方法的有效性、可行性。 二、交流异步电机的矢量控制原理 矢量控制基本思想是根据坐标变换理论将交流电机两个在时间相位上正交 的交流分量,转换为空间上正交的两个直流分量,从而把交流电机定子电流分解成励磁分量和转矩分量两个独立的直流控制量,分别实现对电机磁通和转矩的控制,然后再通过坐标变换将两个独立的直流控制量还原为交流时变量来控制交流电机,实现了像直流电机那样独立控制磁通和转矩的目的。 由于交流异步电机在A-B-C坐标系下的数学模型比较复杂,需要通过两次坐标变换来简化交流异步电机的数学模型。一次是三相静止坐标系和两相静止坐标系
最新同步电机
第八章 同步电机 8.1 同步电机原理和结构 1.同步发电机原理简述 (1)结构模型: 同步发电机和其它类型的旋转电机一样,由固定的定子和可旋转的转子两大部分组成。最常用的转场式同步电机的定子铁心的内圆均匀分布着定子槽,槽内嵌放着按一定规律排列的三相对称交流绕组。这种同步电机的定子又称为电枢,定子铁心和绕组又称为电枢铁心和电枢绕组。转子铁心上装有制成一定形状的成对磁极,磁极上绕有励磁绕组,通以直流电流时,将会在电机的气隙中形成极性相间的分布磁场,称为励磁磁场(也称主磁场、转子磁场)。除了转场式同步电机外,还有转枢 式同步发电机,其磁极安装于定子上,而交流 绕组分布于转子表面的槽内,这种同步电机的 转子充当了电枢。图8-1-1给出了典型的转场 式同步发电机的结构模型。图中用AX 、BY , CZ 共3个在空间错开120°电角度分布的线 圈代表三相对称交流绕组。 (2)工作原理 同步电机电枢绕组是三相对称交流绕组,当 原动拖动转子旋转时,通入三相对称电流后,会产生高速旋转磁场,随轴一起旋转并顺次切割定子各相绕组(相当于绕组的导体反向切割励磁磁场),会在其中感应出大小和方向按周期性变化的交变电势,每相感应电势的有效值为, E 0=4.44f N Фf k w (8-1-1) 式中 f ——电源频率;Фf ——每极平均磁通; N ——绕组总导体数;k w ——绕组系数; E 0是由励磁绕组产生的磁通Фf 在电枢绕组中感应而得,称为励磁电势(也称主电势、空载电势、转子电势)。由于三相电枢绕组在空间分布的对称性,决定了三相绕组中的感应电势将在的时间上呈现出对称性,即在时间相位上相互错开1/3周期。通过绕组的出线端将三相感应电势引出后可以作为交流电源。可见,同步发电机可以将原动机提供给转子的旋转机械能转化为三相对称的交变电能。 感应电势的频率决定于同步电机的转速n 和极对数p ,即 图8-1-1 同步电机结构模型 60 pn f
交流电动机参数测试技_图文(精)
交流电机动态参数分析与故障诊断研究受周围冷却介质的影响。有交变磁场的地方,不能采用水银温度计。电阻法测取绕组温度时,冷热态电阻必须是在相同的出线端上测量的。绕组的平均温升Δθ ( K 按公式(2-35)计算:Δθ = RN ? R1 ( K1 + θ1 + θ1 ? θ a R1 (2-35 式中 RN ——额定负载热试验结束时的绕组端电阻,单位为欧姆(Ω ) R1 ——温度为θ1 时的绕组初始端电阻,单位为欧姆 (Ω )θ a ——热试验结束时的冷却介质温度,单位为摄氏度(℃)θ1 ——测量初始端电阻 R1 时的绕组温度,单位为摄氏度(℃) K1 ——对铜绕组,为 235;对铝绕组,为 225,除非另有规定由于测量电阻的微小误差在确定温度时会造成较大误差,所以测量绕组电阻的双臂电桥或单臂电桥,或数字式微欧计测量,准确度应不低于 0.2 级。埋置检温计法是指用装在电动机内的热电偶或电阻式温度计测量温度。专门设计的仪表应与电阻式温度计一起使用,以防止在测量时因电阻式温度计的发热而引入显著的误差或损伤仪表。许多普通的电阻式测量器件可能不适用,因为在测量时可能有相当大的电流要流过电阻原件。 2-2-9-2 温度读数以上三种温度测量方法,用以测定电动机的绕组、定子铁心、进入冷却介质以及受热后排出的冷却介质的温度,每种测量方法都有其特点,适用于测量电动机特定部件的温度。若采用温度计测量电动机温度需要测量以下部件的温度:(如有规定可在停机后的测量)定子线圈,至少在两个部位;定子铁心,对大、中型电动机,至少在两个部位;环境温度;从机座或排气通风道排出的空气或者带循环冷却系统的电动机排到冷却器入口处的内部冷却介质;机座;轴承。应将温度敏感原件放置于能测得最高温度的部位,对于进、出气流的空气或其他冷却介质的温度,敏感原件应放置于测得平均温度的部位。绕组装有埋置检温计的电动机热试验时,应用埋置检温计法测定绕组温度并写入报告。通常不要求停机后再取读数。用电阻法测量定子绕组温度时应在电动机出线端处直接测量任意两线端间的电阻,此电阻已测量了初始值和初始温度。 2-2-9-3 试验结束时冷却介质温度的确定对连续定额和断续周期工作制定额的电动机,试验结束时的冷却介质温度应取在整个试验过程最后的 1/4 时间内,按相同时间间隔测得的几个温度计读数的平均值。对短时定额的电动机,试验结束时的冷却介质温度,若定额为 30min 及以下,取试验开始与结束时的温度计读数的平均值;若定额为 30min ~ 90min,取 1/2 试验时
异步电动机动态数学模型仿真
目录 1异步电动机动态数学模型 (2) 1.1三相异步电动机的多变量非线性数学模型 (3) 1.1.1异步电动机三相动态模型的数学表达式 (4) 1.1.2异步电动机三相原始模型的性质 (5) 1.2坐标变换 (6) 1.2.1坐标变换的基本思路 (6) 1.2.2三相-两相变换(3/2变换) (7) 2异步电动机在正交坐标系上的动态数学模型 (10) 2.1静止两相正交坐标系中的动态数学模型 (10) 2.2旋转正交坐标系中的动态数学模型 (12) 2.3 异步电动机在正交坐标系上的状态方程 (14) 3异步电动机模型仿真 (15) 3.1AC Motor模块 (15) 3.2坐标变换模块 (16) 3.3仿真原理图 (20) 4仿真结果及分析 (22) 结论 (26) 参考文献 (27)
异步电动机动态数学模型的建模与 仿真 1异步电动机动态数学模型 电磁耦合是机电能量转换的必要条件,电流与磁通的乘积产生转矩,转速与磁通的乘积得到感应电动势,无论是直流电动机,还是交流电动机均如此,但由于交、直流电动机结构和工作原理的不同,其表达式差异很大。 他励直流电动机的励磁绕组和电枢绕组相互独立,励磁电流的电枢电流单独 可控,若忽略对励磁的电枢反应或通过补偿绕组抵消之,则励磁和电枢绕组各产 生的磁动势在空间相差 ,无交叉耦合。气隙磁通由励磁绕组单独产生,而电磁转矩正比于磁通与电枢电流的乘积。不考虑弱磁调速时,可以在电枢合上电源以前建立磁通,并保持励磁电流恒定,这样就可认为磁通不参与系统的动态过程。因此,可以只通过电枢电流来控制电磁转矩。 在上述假定条件下,直流电动机的动态数学模型只有一个输入变量——电枢电压,和一个输出变量——转速,可以用单变量(单输入单输出)的线性系统来描述,完全可以应用线性控制理论和工程设计方法进行分析与设计。 而交流电动机的数学模型则不同,不能简单地采用同样的方法来分析与设计交流调速系统,这是由于以下几个原因。 1)异步电机变压变频调速时需要进行电压(或电流)和频率的协调控制,有电压(电流)和频率两种独立的输入变量。在输出变量中,除转速外,磁通也得算一个独立的输出变量。因为电机只有一个三相输入电源,磁通的建立和转速的变化是同时进行的,为了获得良好的动态性能,也希望对磁通施加某种控制,使它在动态过程中尽量保持恒定,才能产生较大的动态转矩。由于这些原因,异步电机是一个多变量(多输入多输出)系统。 2)直流电动机在基速以下运行时,容易保存磁通恒定,可以视为常数。异步电动机无法单独对磁通进行控制,电流乘磁通产生转矩,转速乘磁通产生感应电2
第六章 同步电机的稳态分析
第六章同步电机的稳态分析 6.1同步电机的基本结构和运行状态 一、同步电机的基本结构 按照结构型式,同步电机可以分为旋转电枢式和旋转磁极式两类。 旋转电枢式——电枢装设在转子上,主磁极装设在定子上。这种结构在小容量同步电机中得到一定的应用。 旋转磁极式——主磁极装设在转子上,电枢装设在定子上。对于高压、大容量的同步电机,通常采用旋转磁极式结构。由于励磁部分的容量和电压常较电枢小得多,电刷和集电环的负载就大为减轻,工作条件得以改善。目前,旋转磁极式结构已成为中、大型同步电机的基本结构型式。 在旋转磁极式电机中,按照主极的形状,又可分成隐极式和凸极式,如图6-l所示。 隐极式——转于做成圆柱形,气隙为均匀; 凸极式——转子有明显的凸出的磁极,气隙为不均匀。 对于高速的同步电机(3000r/min).从转子机械强度和妥善地固定励磁绕组考虑,采用励磁绕组分布于转子表面槽内的隐极式结构较为可靠.对于低速电机(1000r/min 及以下),转子的离心力较 小,故采用制造简单、励 磁绕组集中安放的凸极式 结构较为合理。大型同步 发电机通常采用汽柁机或 水轮机作为原动机来拖 动,前者称为汽轮发电机, 后者称为水轮发电机。由 于汽轮机是一种高速原动 机,所以汽轮发电机一般 采用隐极式结构。水轮机 则是一种低速原动机,所 以水轮发电机一般都是凸极式结构。同步电动机、由内燃机拖动的同步发电机以及同步补偿机.大多做成凸极式,少数两极的高速同步电动机亦有做成隐极式的。 隐极同步电机 以汽轮发电机为例来说明隐极同步电机的结构。现代的汽轮发电机一般都是两极的,同步转速为3000r/min(对50Hz的电机)。由于转速高,所以汽轮发电机的直径较小,长度较长.汽轮发电机均为卧式结构,图6—2表示一台汽轮发电机的外形图。汽