航模直流无刷无感电机调速控制系统设计_戴敏
收稿日期:2005-12-06
作者简介:戴敏(1977—),女,江苏泰兴人,在读博士研究生,主
要研究方向为机械制造及其自动化技术。
航模直流无刷无感电机调速控制系统设计
戴 敏,曹 杰,史金飞
(东南大学机械工程系,江苏南京 210096)
摘要:针对航模用无传感器无刷直流电机的特点,设计开发了其专用调速控制系统。首先分析了无传感
器无刷直流电机的位置检测方法、P WM 调制方式和启动策略等控制原理。接着以MEGA8单片机为核心设计了硬件系统,对几个关键控制电路给出了原理图并进行了详细阐述。最后还给出了系统控制多种航模用电机的测试结果。关键词:无位置传感器;无刷直流电机;控制系统;ME GA 8中图分类号:T M 301 文献标识码:B 文章编号:1000-8829(2006)07-0030-04
Desi gn of a Speed -Adjust m ent Control Syste m for Senseless B rushless DC M otor
DA IM in 牞CAO Jie 牞S H I Jin -fei
牗M echanica l Eng i neering Depart m ent 牞Sou t heast Unive rsit y 牞N an ji ng 210096牞China 牘
Abst ract 牶A speed -ad j u st m ent contr o l syste m o f sense l e ss brushless DC m o tor i n aero m odelling is intr oduced .So m e basic t h eo ries 牞such asm e t h ods of position detection 牞P WM con trol and starting po licy o f senseless BLD -C M are disserted in t h e firs.t The hardwa r e design is based on MEGA 8m ic r ocontr o ll e r .So m e key control c ir -cuits are discussed .Fina ll y 牞a test resu lt of controlli n g m u lti -senso rless BLDC M in ae r o m odelling is specified .K ey w ords 牶senseless 牷br ush less DC m oto r 牗BLDC M 牘牷con tro l syste m 牷M E GA8 航模用无刷直流电机(BLDC M )具有体积小、重量轻、效率高和可靠性高等优点,由于航模领域的特殊性,对于电机的控制系统也提出了一些特殊的要求,其中最重要的就是要求控制系统的体积小、质量轻。这就要求设计者在设计控制电路时必须使用较少的元器件和较简单的电路。
关于无传感器无刷直流电机控制系统的研究很多,其中文献[1]提出了使用MC 68HC908GP32芯片为核心的无传感器无刷直流电机控制应用策略;文献[2]提出了一种基于DSP 的无传感器无刷直流电机控制方法,借助于DSP 的强大运算处理能力,完全由软件实现反电势过零检测换相和开环起动。这些方法均能实现对电机的控制,但是在电路设计上都比较复杂,与航模用无刷电机控制系统电路设计简单的要求相矛盾。本设计是以M E GA8单片机为核心的无刷直流电机控制系统,该系统充分发挥MEGA 8单片机的特点,外围控制电路十分简单。
1 无传感器无刷直流电机控制简介
目前常用的无刷直流电机控制方法可分为3类:
开环控制,转速负反馈控制和电压负反馈加电流正反馈控制。其中开环控制方式适合于转速精度要求不高的场合,转速负反馈方式适合于机械特性要求比较硬、转速精度比较高的场合,而电压负反馈电流正反馈方式则应用于动态性能要求比较高的场合。航模用的无刷直流电机对于转速精度要求并不很高,使用开环控制方式就可满足要求。
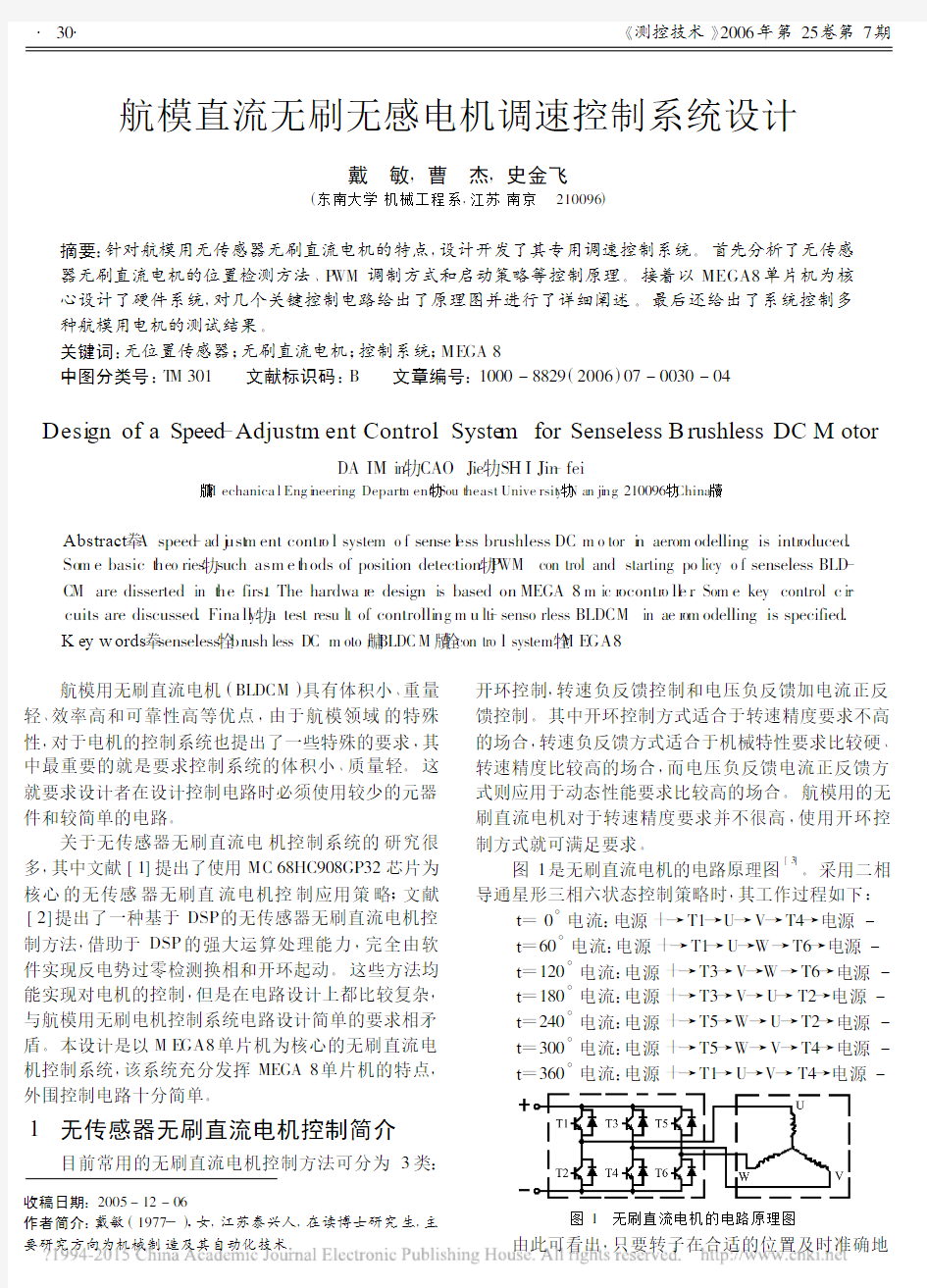
图1是无刷直流电机的电路原理图[3]
。采用二相导通星形三相六状态控制策略时,其工作过程如下:
t =0°电流:电源+→T1→U →V →T4→电源-t =60°电流:电源+→T1→U →W →T6→电源-t =120°电流:电源+→T3→V →W →T6→电源-t =180°电流:电源+→T3→V →U →T2→电源-t =240°电流:电源+→T5→W →U →T2→电源-t =300°电流:电源+→T5→W →V →T4→电源-t =360°电流:电源+→T1→U →V →T4→电源-
图1 无刷直流电机的电路原理图
由此可看出,只要转子在合适的位置及时准确地
切换相应的开关管进行换流,电机就能平稳旋转并获得最大的转矩。
2 系统设计
2.1 总体设计
如前所述,在航模电机调速控制系统中,对设计者最大的挑战就是如何使用简单的电路,较少的元器件,在有限的空间里设计出高效、可靠的控制系统。因此作者选用了M E GA8单片机作为系统控制核心,在电机驱动部分使用P 沟道和N 沟道配合的全桥驱动电路。对于一些既可以使用硬件电路实现,又可以使用软件程序实现的功能,在设计中将权衡两者在实现中的速度、精度和复杂程度,做出合理的选择。
航模电机调速控制系统具有以下功能:①电机速度控制信号的检测;
②三相直流无传感器无刷电机的调速控制;③电池电压检测。2.2 硬件设计
系统硬件框图如图2所示(其中虚线部分只在开发调试中使用
)。
图2 系统硬件框图
2.2.1 MEGA8单片机简介
M E GA8单片机内部集成了8KB 的FLASH ,具有丰富强大的硬件接口电路,但由于采用了小引脚封装,所以价格与低档单片机相当,因此具有极高的性价比。当工作在16MH z 时,具有16M I PS 的性能,完全可以适合无传感器无刷直流电机的控制需求。带TQFP 封装的M E GA8单片机具有2通道8位A /D 转换,可以胜任电池电压检测这种对精度没有苛刻要求的功能。
M E GA8最多有23个可编程的I /O 口,可任意定义I /O 口的输出和输入方向。输出时为推挽输出,驱动能力强,可直接驱动大电流负载。输入口可定义为三态输入、带内部上拉电阻输入,具有一定的灵活性,且可以简化外部电路。
另外,MEGA 8支持I SP 功能,在程序设计、调试时可以很方便地对器件进行在线编程、修改,而不需要使用专用设备。2.2.2 反电势过零检测电路设计
无位置传感器无刷直流电机控制的一个关键点就
是电机转子位置信息的检测与估计。作者在设计中使
用了反电动势过零法[4]
对转子位置进行检测。该方法具有线路简单、技术成熟、成本低廉等优点,当然也存在电机不转及转速很低时,反电势无法检测的缺点。对于这些不足,作者使用了软件优化等方法予以克服。
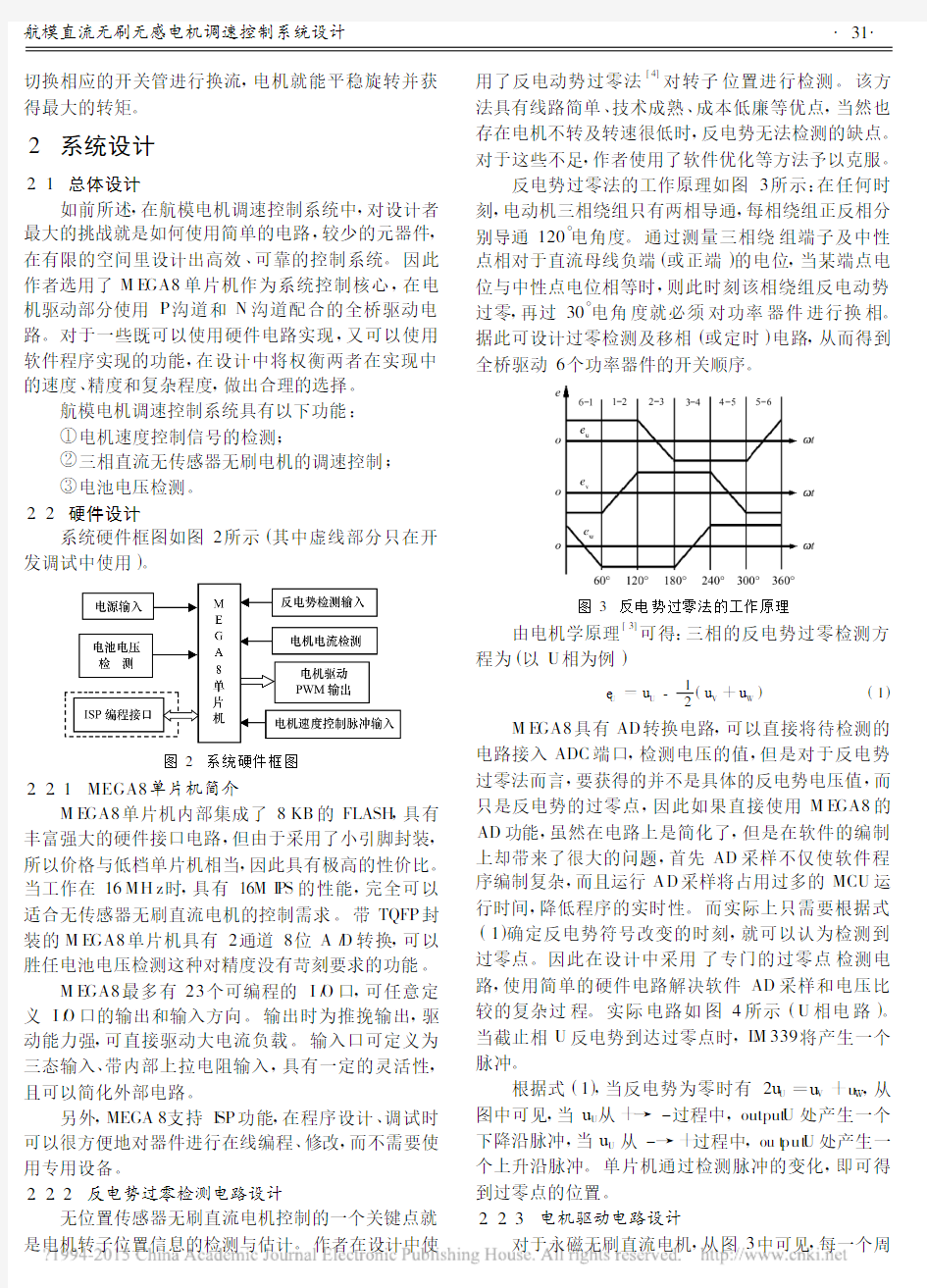
反电势过零法的工作原理如图3所示:在任何时刻,电动机三相绕组只有两相导通,每相绕组正反相分别导通120°电角度。通过测量三相绕组端子及中性点相对于直流母线负端(或正端)的电位,当某端点电位与中性点电位相等时,则此时刻该相绕组反电动势过零,再过30°电角度就必须对功率器件进行换相。据此可设计过零检测及移相(或定时)电路,从而得到全桥驱动6个功率器件的开关顺序。
图3 反电势过零法的工作原理
由电机学原理[3]
可得:三相的反电势过零检测方程为(以U 相为例)
e U =u U -1
2(u V
+u W )(1)
M E GA8具有AD 转换电路,可以直接将待检测的电路接入ADC 端口,检测电压的值,但是对于反电势过零法而言,要获得的并不是具体的反电势电压值,而只是反电势的过零点,因此如果直接使用M E GA8的AD 功能,虽然在电路上是简化了,但是在软件的编制上却带来了很大的问题,首先AD 采样不仅使软件程序编制复杂,而且运行AD 采样将占用过多的MCU 运行时间,降低程序的实时性。而实际上只需要根据式(1)确定反电势符号改变的时刻,就可以认为检测到过零点。因此在设计中采用了专门的过零点检测电路,使用简单的硬件电路解决软件AD 采样和电压比较的复杂过程。实际电路如图4所示(U 相电路)。当截止相U 反电势到达过零点时,L M 339将产生一个脉冲。
根据式(1),当反电势为零时有2u U =u V +u W ,从图中可见,当u U 从+→-过程中,output U 处产生一个下降沿脉冲,当u U 从-→+过程中,ou t p ut U 处产生一个上升沿脉冲。单片机通过检测脉冲的变化,即可得到过零点的位置。2.2.3 电机驱动电路设计
对于永磁无刷直流电机,从图3中可见,每一个周
图4 反电势检测电路(U 相)
期由6个60°的扇区组成,每个元件导通120°,即在两个连续的扇区中导通。因此有2种P WM 调制方式:半桥载波和全桥载波。对于永磁直流电机而言,无论是上半桥载波还是下半桥载波,截止相都会产生续流,导致其余两相电流产生波动,电机转速越高,相应的波动也就越大。而采用全桥载波,则始终有两相导通,截止相不会产生续流,电流波动和转矩脉动都较小。当然全桥载波也有不足之处,全桥载波时功率管的开关损耗是半桥载波方式的2倍。
在本设计中电机的驱动采用全桥驱动电路,使用一对P 沟道和N 沟道的POWER MOSFET 控制。电路如图5所示。M E GA8单片机具有3个硬件P WM 通道,可以实现任意<16位、相位和频率可调的P WM 脉宽调制输出,因此在设计中直接使用硬件P WM 功能。从速度和精度上来讲,硬件P WM 都优于软件P WM ,而且使用硬件P WM 不仅不需要增加外围电路,还可以减少软件编程的难度
。
图5 电机驱动电路(U 相)
2.3 软件设计2.
3.1 电机启动策略
对于电机的启动,作者在设计中使用了软件启动法:在电机静止和低速运行时,其反电势为零或极低,无法检测,因此采用外同步起动的方法。在电机起动时,先在某相加电压,然后检测过零点,若检测到过零点,就提前切换,如果检测不到就延时一段时间再切换。以此来使电机转速逐渐升高,当反电势足够大时,则进入正常运转方式。2.3.2 调速控制程序
由于使用反电势过零法实现电机的驱动,电机的
控制将完全依赖于M E GA8的控制程序。当电机高速
运转时(最高可达60000r /m in ),电机的换相必须在很短的时间内完成。这就要求电机控制程序的算法简短、精确并高效。
电机调速控制信号的周期通常在1100~1900μs 之间。程序使用M E GA8内部定时器作为检测调速信号的基准时钟。当MEAGE8工作在16MH z ,定时器工作在8分频的模式下时,定时器的时间精度为0.5μs ,程序检测控制信号的精度达到0.5%。
电机调速控制信号的检测在外部中断程序中完成,如图6所示。外部中断程序检测调速控信号的上升沿与下降沿,根据基准时钟计算出脉冲时间,然后设置P WM 的占空比。
电机的换相控制在程序主流程中完成,如图7所示。程序以三相六状态循环的方式工作。当进入一个状态的控制阶段时,程序首先根据上一次换相的时间,估算本次过零点时间,然后等待检测反电势过零点。当检测到准确的过零点时间后,程序计算出本次换相点理论时间(30°换相时间)。随后根据设置的参数对换相时间做修正,以发挥电机的最大工作效率。当换相时间到达时,程序切换MOSFET 管的通断状态,然后进入下一状态的控制阶段。
图6 调速信号检测流程图
图7 电机换相控制流程图2.3.3 软件保护措施
航模在实际使用中经常会发生电池电压过高或过低、控制信号中断、电机堵转等意外情况。电池电压过高或过低可能会导致控制板电路无法正常工作。电机堵转可能会造成电池或电机的烧毁。因此作者在设计控制程序时加入了很多的保护措施:
①在电机启动之前,程序首先会检测电池的电压。如果电池电压过低或过高,程序会发出报警。
②程序通过一个定时器中断检测控制脉冲信号的输入情况。如果在一定时间内没有信号输入,程序将关闭电机以防发生意外情况。
③程序在每次换相结束后,都会检测电池的当前电压与电机的工作电流。当电机发生堵转时,通过电机的电流会陡然上升,软件将立即关闭电流输出以防止电池或电机的损坏。
④程序启动MEGA 8中的看门狗功能,用以外部干扰导致软件发生异常时自动启动。
3 电机测试
作者对无传感器无刷直流电机控制系统进行了两项测试。一项为线性度测试,另一项为电机驱动测试。
线性度测试使用了某航模公司提供的电调专用测试仪。测试仪可产生从1100~1900μs 的连续信号,并能自动记录下电机的转速变化曲线。控制系统测试结果如图8所示。图中,1100~1200μs 阶段为电机的外同步启动阶段。1200~1800μs 反电势过零法调速控制阶段。1800μs 以后为电机全速运转阶段。测试结果显示作者设计的控制系统在调速控制阶段具有较好的线性度,并且在从外同步启动阶段向反电势过零法控制阶段过渡时也较平滑
。
图8 电机控制系统测试结果
电机驱动测试的目的是要考验控制系统与无传感器无刷直流电机兼容性。测试选用了市售的4款电机,即ELE850:7.3雷达减速器+9047桨,GS2030:7.14减速器+9047桨,ELE1000:9减速器+9047桨,TOWERPRO :外转子无刷+9047桨直驱。测试时使用7.4V 2500m ah 锂电池作为控制板的驱动。使用4VF 发射机/接收机提供电机速度控制脉冲。测试时人工操作4VF 发射机发出1至22级速度控制信号,在每一级信号下测量电机的实际转速。测试结果如图9所示。测试结果表明,控制系统对4款电机均能良好地驱动。
4 结束语
针对航模无传感器无刷直流电机控制系统的特点要求,采用M E GA8单片机设计的电机控制系统,使用硬件和软件相结合的设计方法,使用硬件电路搭建必
要的外围电路,主要使用软件来实现电机调速控制,使
系统在满足航模电机调速要求的情况下,具有更好的灵活性。
图9 电机驱动测试结果
参考文献:
[1] 奉华成,皮佑国,吴效明.M C68HC908GP32在无刷无传感
器型直流电机控制中的应用[J ].电子技术,2002,(12).[2] 王微子,等.基于DSP 的无位置传感器无刷直流电动机
调速系统[J ].微特电机,2004,(7).
[3] 李钟明,刘卫国.稀土永磁电机[M ].北京:国防工业出版
社,1999.
[4] 罗隆福,杨艳,吴素平.BLDC M 无位置传感器换相检测和
开环起动的软件实现[J ].微特电机,2004,(3).
□
(上接第25页)
(3)该方法主要适合于单根裂缝的计算。(4)如果进一步提高采集系统和处理过程的自动化、程序化,不仅可以对高处、危险处等人无法靠近的
地方进行检测,也可以实时跟踪裂纹尖端的发展[9]
,从而提高现场的工作效率。参考文献:
[1] 姚继涛,马永欣,等.建筑物可靠性鉴定和加固———基本
原理和方法[M ].北京:科学出版社,2003.
[2] 侯宝隆,蒋之峰.混凝土的非破损检测[M ].北京:地震出
版社,1992.[3] K i m K S ,K ang K S ,K ang Y J ,Cheong S K.A na l y sis of an
interna l crack o f pressure pipe line usi ng ESP I and shearog ra -phy [J ].O p tics &Lase r Techno logy ,2003,35(8):639-643.
[4] V oge lH J ,H off m ann H ,Ro t h K.S t udies of c rack dynam ics
in clay so i.l I :Experi m enta lm ethods ,results ,and mo rpho l og -ical quantificati on [J ].G eoder m a ,2005,125:203-211.
[5] 陆玲,陈国明,戴扬.水下结构物裂缝特征定量分析与测
量[J ].计算机测量与控制,2004,(1):10-12.
[6] 施树明,初秀民,王荣本.沥青路面破损图像测量方法研
究[J ].公路交通科技,2004,(7):12-16.
[7] 耿飞,钱春香.图像分析技术在混凝土收缩裂缝定量测
试与评价中的应用研究[J ].东南大学学报(自然科学版),2003,(6):773-776.
[8] 刘宝琛.实验断裂,损伤力学测试技术[M ].北京:机械工
业出版社,1994.
[9] 王蕾,宋文忠,韩桃.目标自动跟踪系统半实物仿真平台
设计[J ].测控技术,2003,24(3):64-67.
□
直流无刷电机硬件设计文档
硬件电路设计说明书V1 文档版本 1.0 编写人:彭威 编写时间:2015-06-10 部门:研发部 审核人: 审核时间:
1.引言 1.1编写目的 本文档是无刷直流电机风机盘管电源电路及控制驱动电路的硬件设计说明文档,它详细描述了整个硬件模块的设计原理,其主要目的是为无刷直流电机控制驱动电路的原理图设计提供依据,并作为 PCB 设计、软件驱动设计和上层应用软件设计的参考和设计指导。 1.2产品背景 1.3参考资料 Datasheet:Kinetis KE02 Datasheet:MKE02Z16VLC2 Datasheet:MKE02Z64M20SF0RM Datasheet:FSB50760SFT Datasheet:TNY266 Datasheet:FAN7527 2.硬件电路概述 2.1电源部分 电源部分主要功能是提供400V直流电供给电机,另外提供15V直流电给电机驱动芯片供电。采用反激式开关电源设计。 2.1.1总体方案
设计一款 100W驱动开关电源。给定电源具体参数如下: (1)输入电压:AC 85V~265V (2)输入频率:50Hz (3)工作温度:-20℃~+70℃ (4)输出电压/电流:400V/0.25A (5)转换效率:≧85% (6)功率因数:≧90% (7)输出电压精度:±5% 系统整体框架如下 如图所示为电源的整体架构框图,主要目的是在输入的85~265V、50Hz交流电下,输出稳定的恒压电机驱动直流电。由图可知,电源电路主要包括了前级保护电路模块、差模共模滤波模块、整流模块、功率因数校正模块、DC/DC模块。其中EMI滤波电路能够抑制自身和电源线产生的电磁污染,功率因数校正电路采用Boost有源功率因数
航模无刷电机调速器说明书
航模无刷电机调速器说明书 尊敬的用户:感谢您使用飞盈佳乐有限公司设计、制造的航模无刷马达智能动力控制器(ESC)。因本产品在启动使用时产生的功率强大,错误的使用及操作可能造成人身伤害和设备损坏,我们强烈建议客户在使用本产品前仔细阅读本使用手册,严格按操作规定使用。我们不承担因使用本产品而引起的的任何责任,包括但不限于附带损失或者间接损失的赔偿责任。同时,不承担使用人擅自拆装及修改本产品引起的任何责任和因第三方产品所造成的任何责任。 我们有权不预先通知变更产品,包括外观,性能参数及使用要求;对本产品是否适合使用者特定用途不作任何保证、申明或承诺。 一、航模无刷电机控制器主要特性: ●采用功能强大、高性能MCU处理器,用户可以针对自身需求设置使用功能,充分体现我们产品独具优势的智能特点 ●支持无刷电机无限制最高转速 ●支持定速功能。 ●精心的电路设计,抗干扰性超强 ●启动方式可设置,油门响应速度快,并具有非常平稳的调速线性,兼容固定翼飞机及直升飞机。 ●低压保护阀值可设置 ●内置SBEC,带舵机负载功率大 ●具备多种保护功能:输入电压异常保护/电池低压保护/过热保护/油门信号丢失降功率保护 ●通电安全性能好:接通电源时无论遥控器油门拉杆在任何位置不会立即启动电机 ●过温保护:控制器工作时温度到达120℃时功率输出会自动降低一半,低于120℃时功率输出自动恢复 ●兼容所有遥控器操作设置和支持编程卡设置 ●设置报警音判断通电后工作情况 ●本公司对此产品具备完整知识产权,产品可持续升级更新。并可根据客户的需求量身定制产品。 调速器产品规格 1)OPTO调速器没有内置BEC, 工作时需单独给舵机、接收机供电 2)S BEC调速器,给舵机供电是开关电源模式,输出电压5.5V,舵机可以带4A负载,瞬间2秒可达8A 3)UBEC调速器,给舵机供电是线性电源模式
无刷直流电机(BLDC)双闭环调速解析
无刷直流电机(BLDC)双闭环调速系统 在无刷直流电机双闭环调速系统中,双闭环分别是指速度闭环和电流闭环。对于PWM 的无刷直流电机控制来说,无论是转速的变化还是由于负载的弯化引起的电枢电流的变化,可控量输出最终只有一个,那就是都必须通过改变PWM的占空比才能实现,因此其速度环和电流环必然为一个串级的系统,其中将速度环做为外环,电流环做为内环。调节过程如下所述:由给定速度减去反馈速度得到一个转速误差,此转速误差经过PID调节器,输出一个值给电流环做给定电流,再由给定电流减去反馈电流得到一个电流误差,此电流误差经过PID 调节器,输出一个值就是占空比。 在速度环和电流环的调节过程中,PID的输出是可以作为任意量纲(即无量纲,用标幺值来表示;标幺值:英文为per unit,简写为pu,是各物理量及参数的相对单位值,是不带量纲的数值)来输入给下一环节或者执行器的,因此无需去管PID输出的量纲,只要是这个输出值反映了给定值和反馈值的差值变化,能够使这个差值无限趋近于零即可,相当于将输出值模糊化,不用去搞的太清楚,如果你要是一直在这里纠结输出值具体是个什么东西时,那么你就会瞎在这里出不来了。假如你要控制一个参数,并且这个参数的大小和你给定量和反馈量有着直接的关系(线性关系或者一阶导数关系或者惯性关系等),那么就可以不做量纲变换。比如速度环的PID之后的输出就可以直接定义为转矩,因为速度过慢就要提高转矩,速度过快就要减小转矩,PID输出量的意义是调整了这个输出量,就可以直接改变你要最终控制的参数,并且这个输出量你是可以直接来控制的,这种情况下PID输出的含义是你可以自己定的,比如直流电机,速度环输出你可以直接定义为转矩,也可以定义为电流,然后适当的调节PID的各个参数,最终可以落到一个你能直接控制的量上,在这里最终的控制量就是占空比的值,当占空比从0%—100%时对应要写入到寄存器里面的值为0—3750时,那么0—3750就是最终的控制量的范围。 在调速控制中,既要满足正常负载时的速度调节,还要满足过负载时进行电流调节。如果单独采用一个调节器时,其调节器的动态参数无法保证两种调节过程同时具有良好的动态品质,因此采用两个调节器,分别调节主要被调量转速和辅助被调量电流,以转速调节器的输出作为电流调节器的输入,电流环是通过电流反馈控制使电机电枢电流线性受控,可达到电机输出力矩的线性控制,并使其动态范围响应快,最后再输出去控制占空比,从而改变MOSFET的导通时间,二者之间实行串级连接,它是直流电力传动最有效的控制方案。 在双闭环调速系统中,输入参数有三个,分别为给定速度和反馈速度以及反馈电流,其中给定速度由用户指定,一般指定为旋转速度(RPM 转/分钟)或直线速度(m/s 米/秒)。而反馈速度和反馈电流则需要由传感器来获取,下面来讲一下在无刷直流电机控制系统中,反馈速度和反馈电流的获取。 反馈速度:简单点的就由电机内用来检测转子位置的三个霍尔元件来得到,高端点的就加光电编码器,分别称为霍尔元件测速和编码脉冲测速。 霍尔元件测速:在电机磁极对数为1的情况下,转子旋转一周的时间内,霍尔传感器输出3路各180度信号,其中每两个传感器之间有60度的交叠信号,只要检测其中一路霍尔传感器的信号宽度就能计算出电机的速度。用输入捕捉(CAP)端口在上升沿捕捉一个时间标签,再在下降沿捕捉一个时间标签,根据两个时间标签的差值得出周期,由于霍尔传感器是在电机内固定不变的,因此每次在霍尔传感器的信号宽度下旋转的角度是一定的(即走过的距离是固定的),最后用此固定的距离除以周期即可得到速度,即T法测速,测量两个信号
无刷直流电机调速--C语言源程序
附录 1. C语言源程序: #include"stdio.h" #include"myapp.h" #include"ICETEK-VC5502-EDU.h" #include"scancode.h" #include"lcd.h" #define CTRSTATUS (*(unsigned int * )0x608000) //port8000 #define CTRLED (*(unsigned int * )0x608004) //port8004 #define MCTRKEY (*(unsigned int * )0x608005) //port8005 #define CTRCLKEY (*(unsigned int * )0x608006) //port8006 #define CTRMOTORBSPEED (*(unsigned int * )0x608003) void InitMcBSP(); void INTR_init( void ); void InitForMotorB( void ); void showparameters(); void LCDPutString(unsigned int * pData,int x,int y,unsigned int nCharNumber,unsigned color); void PIDControl(int rk,int yk); void PrintParameters(); //定时器分频参数 #define T100 99 // 100个时钟周期中断一次 #define T2Hz 20000 // 20000个时钟周期读取速度一次 //工作变量 usigned int uWork,uN,nCount,nCount1,nCount2,nCount3,nCount4; int nSSS,nJSSpeed,pwm1; int md,wc; unsigned int nScreenBuffer[30*128]; float a=0.6f,b=0.2f,c=0.1f,duk; int ek,ek1,ek2,tz;
直流无刷电机本体设计解读
电机与拖动基础 课程设计报告 设计题目: 学号: 指导教师: 信息与电气工程学院 二零一六年七月
直流无刷电机本体设计 1. 设计任务 (1) 额定功率 80N P W = (2) 额定电压310N U V ≤ (3) 电动机运行时额定转速 1000/min N n r = (4) 发电机运行时空载转速max 6000/min n r = (5) 最大允许过载倍数 2.5λ= (6) 耐冲击能力21500/m a m s = (7) 机壳外径42D mm ≤ 设计内容: 1. 根据给定的技术指标,计算电机基本尺寸,包括:定子铁心外径、定子铁心内径、铁心长度等。 2. 磁路计算,包括极对选择、磁钢选型、磁钢厚度、气隙长度等方面计算。 3. 定子绕组计算,包括定子绕组形式、定子槽数、绕组节距等计算。 2. 理论与计算过程 2.1 直流无刷电机的基本组成环节 直流无刷电动机的结构原理如图2-1-1所示。它主要由电机本体、位置传感器和电子开关线路三部分组成。电机本体在结构上与永磁同步电动机相似,但没有笼型绕组和其他起动装置。其定子绕组一般制成多相(三相、四相、五相不等),转子由永久磁钢按一定极对数(2p=2,4,……)组成。图中的电机本体为三相电机。三相定子绕组分别与电子开关线路中相应的功率开关器件连接,位置传感器的跟踪转子与电动机转轴相连接。 当定子绕组的某一相通电时,该电流与转子永久磁钢的磁极所产生的磁场相互作用而产生转矩,驱动转子旋转,再由位置传感器将转子磁钢位置变换成电信号,去控制电子开关线路,从而使定子各相绕组按一定次序导通,定子相电流随转子位置的变化而按一定的次序换相。由于电子开关线路的导通次序是与转子转角同步的,因而起到了机械换向器的换向作用。 因此,所谓直流无刷电机,就其基本结构而言,可以认为是一台由电子开关线路、永磁式同步电机以及位置传感器三者组成的“电动机系统”。其原理框图如图2-1-2所示。
航模电动动力系统 (三) 无刷电机的结构和功率
航模电动动力系统(三)无刷电机的结构和功率 这个系列的前两篇我们说了动力系统的前两个组成部分,电池和电调,今天我们来说电机,电机是动力系统的核心,是他实现了电能机械能转换的关键一步。 马头老师说大家都爱看图不爱看字,我于是就把手头的外转子2212拆开,拍了下面两张照片。
第一张图中左边的是转子,外壳内侧贴着的金属长条就是永磁体,托中国工业的腾飞的福,现在大家都鸟枪换炮了,永磁体都是高性能的稀土磁体。转子的顶端是开好了的一圈散热孔,轴直接插在转子外壳上,由位于外壳顶端的两个内六角螺丝紧固,从第二张图上可以看到。转子的右手就是拆下来的定子,上面绕着线圈,不同的KV用不同的绕法绕上去不同粗细和匝数的漆包线。定子的中心是轴承,转子的轴插入轴承和定子相连,转轴在定子的低端被卡子卡住,实现了定子和转子的紧固。电机基本上是不需要维护的,但是也有例外,就是轴承,如果长时间使用或者在灰尘非常重的恶劣环境使用后电机的噪音有可能突然变高,这个时候把电机拆开,往轴承里面滴一滴润滑油很可能就解决了问题。第一张图的下方和第二章图转轴的顶部是桨保护器,严格的说这个不是电机的组件,但是这是个很了不起的发明。前拉桨飞机炸机的时候受冲击的必然是机头的桨,如果桨和电机轴刚性相连的话炸机的时候螺旋桨就会把非常大的冲击力和冲击力矩毫无保留的传递给电机轴,结果很可能是轴弯了,一个几十块的电机很可能就断送在这几毛钱的轴上。现在利用桨保护器和
橡皮圈,浆可以在电机轴上前后摆动,这样冲击力矩就可以被缓冲,炸机挂掉电机的概率就大大降低了。这里有一个大家容易忽视,但是非常重要的细节。所有的转动机件都要求转动轴过质心,保证动平衡,不然的话转动轴就会受到不平衡的侧向离心力。这里的转动轴是电机轴心,安装在桨保护器上的螺旋桨的质心是桨保护器中心,如果电机轴和桨保护器轴不精确重合的话就会导致动不平衡,轻则增加摩擦降低电机效率和轴承寿命,重则增加射桨概率引发安全事故。其实避免这个问题的方法很简单,就是在紧固桨保护器的时候两边的螺丝要对称拧,左两圈右两圈,千万别把左边的拧到拧不动再去拧右边的,这样的话桨保护器轴必然偏右。 电机好坏主要看转子的装配能不能实现质心和转轴精确重合,也就是动平衡,还有轴承的质量,以及永磁体的磁场强度和耐高温能力。具我观察,给一般固定翼用的话即使最便宜的无刷电机也足够好了,空载转到几千转后电机的噪音几乎还是听不见,说明现在山寨小厂的装配技术也达标了。 和前面一样,技术指标上我们还是从动力系统最重要的功率说起,但是麻烦来了,现在国内的无刷电机基本上都不标额定功率,不知道是不敢标还是不会标,或者考虑到大家使用环境不一样,标了也没用。厂家不提供功率,打个比方就是卖车的不标马力,怎么办?买车的只好去看车屁股后面的排气量了,排量不等于功率,但有一定相关性,同一系列的发动机,2.4L的基本要比1.6L的功率高。当然你拿一个柴油发动机和汽油发动机比没有意义,就像你直接拿无刷和有刷比没有意义一样。无刷电机的排气量是什么?体积。这就是为啥汽车厂家总喜欢在车屁股后面标上1.6L,2.4L,而电机厂家喜欢标2208,2212的原因。不是说体积大就一定功率大,但是电机体积和额定功率相关性最大,比如同是新西达无刷电机,2208电机,22毫米直径,8毫米高度,不管KV值是多少,额定功率都差别不会太大,你拿新西达的2217的电机出来,额定功率肯定比2208大。流进电机的电能从两个途径转换成了其他能力,一部分克服电机转动的反向电动势做功,变成了我们需要的机械能。另外一部分由于漆包线的内阻,P=I^2*R,变成了有害的热能耗散掉了。电机的功率限制主要是由放热决定的,温度升高后导线内阻变大,电机效率变低,此外永磁体也是怕高温的,120度之后就会让普通永磁体受损,所以电机必须控制电流,于是功率受到了限制。同样的绕法和匝数,电机体积大就能用更粗的铜线,内阻变小,同样电流下放热就小,或者说同样的放热可以达到更高电流,这样功率就能提高。同一个电机,在通风散热良好的情况下跑200W没有问题,你把他闷到箱子里面100W就可以要了他的小命,如果你能够把电机浸泡到液氮里面,2208跑1KW也不是没可能,如果泡进液氦,导线超导了,那2208跑5KW也有可能。所以大家做飞机的时候一定要考虑到电机散热,有时候一个巧妙的散热气流引导处理带来的性能提升比多花很多钱买更好电机带来的提升更大。
无刷直流电动机调速系统设计说明
目录 1绪论 (1) 1.1 直流无刷电动机发展状况 (1) 1.2直流无刷电机控制技术的发展 (1) 2 直流无刷电动机的工作原理 (2) 2.1 直流无刷电动机的结构与原理 (2) 2.2三相绕组直流无刷电动机控制主回路的基本类型 (4) 2.3直流无刷电动机控制系统中的PWM控制器 (5) 3 直流无刷电动机控制系统的数学模型 (6) 3. 1直流无刷电动机的基本方程 (7) 3. 2直流无刷电动机控制系统的动态数学模型 (10) 4 硬件电路 (12) 4.1 主电路 (12) 4.2换相电路 (14) 5 软件部分设计 (17) 5. 1软件总体构成 (17) 5. 2主程序的设计 (17) 5. 3中断子程序的设计 (19) 结论 (21) 参考文献 (22) 致谢 .............................................................. 错误!未定义书签。
1绪论 1.1 直流无刷电动机发展状况 电动机作为机电能量转换装置,其应用围已经遍及国民经济的各个领域,电动机主要类型有同步电动机、异步电动机与直流电动机三种。直流电动机具有运行效率高和调速性能好等诸多优点,因此被广泛应用于各种调速系统中。但传统的直流电动机均采用机械电刷的方式进行换向,存在相对的机械摩擦,和由此带来的噪声、火花、无线电干扰以及寿命短等致命弱点。因此,早在1917年,Bulgier就提出了用整流管代替有刷直流电机的机械电刷,从而诞生了无刷直流电机(BLDCM: Brushless Direct Current Motor)的基本思想。 1955年,美国D·Harrison等人首次申请了用晶体管换向线路代替有刷直流电机机械电刷的专利,标志着无刷直流电机的诞生。1978年,原联邦德国MANNESMANN公司的Indramat分部在汉诺威贸易展览会上正式推出其MAC永磁无刷直流电机及其驱动系统,标志着永磁无刷直流电机真正进入了实用阶段。二十世纪80年代国际上对无刷电机开展了深入的研究,先后研制成方波和正弦波无刷直流电机,在10多年的时间里,无刷直流电机在国际上己得到较为充分的发展。现代电力电子器件工艺日臻成熟,出现了功率晶体管(GTR)、可关断晶闸管(GTO)、功率场效应晶体管(MOSFET),特别是绝缘栅双极晶体管(IGBT ), MOS可控晶闸管(IGCT)的开发成功,使无刷直流电机功率驱动电路的可靠性和稳定性得到保障。直流无刷电动机的发展也使得传统的电机学科同当代许多新技术的发展密切相关。随着大功率半导体器件、电力电子技术、微电子技术、数字信号处理技术、现代控制理论的发展以及高性能永磁材料的不断出现,如今的无刷直流电机系统己经成为集特种电动机、功率驱动器、检测元件、控制软件与硬件于一体的典型的机电一体化产品,体现了当今工程科学领域的许多最新成果。 1.2直流无刷电机控制技术的发展 常规控制器(PID控制)尽管控制精度较高,但它需要建立描述动态系统的精确的数学模型,对于未知动态变化的系统要建立精确的数学模型是比较困难的。比如干扰、参数漂移和噪声等不可能在很高的精度下进行模型化。
无刷直流电机软件的设计
4.3 控制器软件设计 软件设计是控制系统最重要的一个组成部分,软件设计的好坏直接关系着整个控制系统性能的优良,控制系统的软件设计一定要具备实时性、可靠性和易维护性,对此,选择一款简单、方便的开发环境对于系统软件的整体优化以及提高整个系统的开发效率有很大的影响。目前支持STM 32系列控制芯片且应用比较广泛的主要有IAR EWARM和KEIL MDK这两个集成开发环境,本文采用的开发环境是KEIL MDK,它是ARM 公司推出的嵌入式微控制器开发软件,集成了业界领先的Vision 4开发平台,具有良好的性能,是ARM开发工具中的最好的选择,适合于不同层次的开发人员使用,尤其是它与我们经常使用的51单片机开发环境Keil C51的整体布局和使用方法类似,只有一些地方不同,操作起来比较熟练,很容易上手,极大的减小了开发人员的使用难度,缩短了开发周期,提高了开发效率,因此这款KEIL MDK得到了很多人的认可。 STM 32的软件开发主要开发方式有2种,就是基于寄存器的开发和基于库函数的开发,其中基于寄存器的开发方式就更51单片机的开发差不多,它是通过直接操作芯片内部的各个寄存器来达到控制芯片的目地,这种方式较直观,程序运行占用的资源少,但对于STM 32这种寄存器数目非常多的芯片来说,采用寄存器的开发方式会减慢开发速度,还让程序可读性降低。而基于库函数的开发方式则是对寄存器的封装,它向下处理与寄存器直接相关的配置,向上为用户提供配置寄存器的接口,这种方式大大降低了使用STM 32的条件,不仅提高了开发效率,而且程序还具有很好的可读性和移植性,因此本文采用的是基于库函数的开发方式,编程语言全采用 C 语言。
无刷直流电机控制系统的设计
1引言无刷直流电机最本质的特征是没有机械换向器和电刷所构成的机械接触式换向机构。现在,无刷直流电机定义有俩种:一种是方波/梯形波直流电机才可以被称为无刷直流电机,而正弦波直流电机则被认为是永磁同步电机。另一种是方波/梯形波直流电机和正弦波直流电机都是无刷直流电机。国际电器制造业协会在1987年将无刷直流电机定义为“一种转子为永磁体,带转子位置信号,通过电子换相控制的自同步旋转电机”,其换相电路可以是独立的或集成于电机本体上的。本次设计采用第一种定义,把具有方波/梯形波无刷直流电机称为无刷直流电机。从20世纪90年代开始,由于人们生活水平的不断提高和现代化生产、办公自动化的发展,家用电器、工业机器人等设备都向着高效率化、小型化及高智能化发展,电机作为设备的重要组成部分,必须具有精度高、速度快、效率高等优点,因此无刷直流电机的应用也发展迅速[1]。 1.1 无刷直流电机的发展概况 无刷直流电动机是由有刷直流电动机的基础上发展过来的。 19世纪40年代,第一台直流电动机研制成功,经过70多年不断的发展,直流电机进入成熟阶段,并且运用广泛。 1955年,美国的D.Harrison申请了用晶体管换相线路代替有刷直流电动机的机械电刷的专利,形成了现代无刷直流电动机的雏形。 在20世纪60年代初,霍尔元件等位置传感器和电子换向线路的发现,标志着真正的无刷直流电机的出现。 20世纪70年代初,德国人Blaschke提出矢量控制理论,无刷直流电机的性能控制水平得到进一步的提高,极大地推动了电机在高性能领域的应用。 1987年,在北京举办的德国金属加工设备展览会上,西门子和博世两公司展出了永磁自同步伺服系统和驱动器,引起了我国有关学者的注意,自此我国开始了研制和开发电机控制系统和驱动的热潮。目前,我国无刷直流电机的系列产品越来越多,形成了生产规模。 无刷直流电动机的发展主要取决于电子电力技术的发展,无刷直流电机发展的初期,由于大功率开关器件的发展处于初级阶段,性能差,价格贵,而且受永磁材料和驱动控制技术的约束,这让无刷直流电动机问世以后的很长一段时间内,都停
直流无刷电机转速控制
一、 直流无刷电机转速控制 1. 模拟PID 控制 1.1 模拟PID 控制原理 在模拟控制系统中,最常用的控制器就是模拟PID 控制器。以下图所示直流电机 控制系统为例,说明PID 控制器控制电机转速的原理。图中)(0t n 为转速设定值,)(t n 为转速反馈值,)()()(0t n t n t e -=为偏差信号,偏差信号通过PID 控制器后产生控制作用作用于直流电机从而控制电机转速到设定值。 常见的模拟PID 控制系统如下图所示。PID 控制器由比例、积分、微分的线性组合构成。控制规律如下: ]) ()(1)([)(0?++=t d i p dt t de T d e T t e K t u ττ * 其中: p K ——控制器的比例系数 i T ——控制器的积分系数 d T ——控制器的微分系数 1) 比例部分 比例部分的数学表达式:)(t e K p 。 比例部分的作用是对偏差信号做出快速反应,一旦控制器检测到偏差,比例部分就 能迅速产生控制作用,且偏差越大,控制作用越强。但仅存在比例控制的系统存在稳态偏差。比例系数越大,响应越快,过渡越快,稳态偏差也越小,但系统也越不稳定,因此比例系数必须选择恰当。 2) 积分部分 积分部分的数学表达式: ?t i p d e T K 0 )(ττ。
从积分部分表达式可以看出,只要系统输出与设定值存在偏差,积分作用就会不断增加,知道偏差为零,因此积分部分可以消除稳态偏差。但积分作用会降低系统的响应速度,增加系统的超调量。积分常数越小,积分作用越强,过渡过程容易产生震荡,但回复时间减小;积分常数越大,积分作用越弱,过渡过程不产生震荡,但回复时间增长。因此应根据具体情况选取积分常数。 3) 微分部分 微分部分的数学表达式: dt t de T K d p ) (。 微分作用能阻值偏差的变化。它根据偏差的变化趋势进行控制。偏差变化越快,微分作用越强,能在偏差变化之前就行控制。微分作用的引入有助于减小超调量,克服振荡;但微分作用对噪声很敏感,导致系统的错误响应,使系统不稳定。 为实现PID 控制器的软件实现,将式*进行适当离散化,即离散PID 。 2. 数字PID 控制 2.1 位置式PID 算法 离散化处理的方法是,以T 为采样周期,对模拟信号进行采样,以k 为采样序列号,进行以下近似: T e e dt t de e T d e kT t k k k j j t 1 )()(-=-≈≈≈∑?ττ 将上式带入式*,得到如下式所示的位置式离散PID 控制规律。 ][1 T e e T e T T e K u k k d k j j i k p k -=-++ =∑ ** 由于位置式PID 要对t 时刻之前的所有输出进行记录,工作量大,对计算机硬件要求高。增量式PID 可避免这些。 2.2 增量式PID 算法 由式**得到 ][2 11 11T e e T e T T e K u k k d k j j i k p k ---=---++ =∑ 将式**与上式相减,得到增量式PID 控制规律如下 211)21()1(---++-++ =-=?k d p k d p k d i p k k k e T T K e T T K e T T T T K u u u *** 一旦得出控制作用的增量,就可递推得出当前控制作用的输出。 2.3 控制器参数整定 1) 离线整定法 步骤 1:将控制器从“自动”模式切换至“手动”模式(此时控制器输出完全由人工控制),人为以阶跃方式增大或减少控制器输出,并记录控制器相关的输入输出动态响应数据。 步骤 2:由阶跃响应数据估计特性参数 K , T ,τ。
无刷永磁直流电机调速系统
毕业设计论文 题目永磁无刷直流电机调速系统设计 (院)系电气与信息工程系 专业电气工程及其自动化班级 0001 学号 0001120121 学生姓名万志雄 导师姓名谢卫才 完成日期 2004-6-15
湖南工程学院 毕业设计(论文)任务书 设计(论文)题目:无刷永磁直流电机调速系统 姓名万志雄系别电气与信息工程系专业电气工程及其自动化班级0001 学号 指导老师谢卫才教研室主任 一、基本任务及要求: 阐述无刷直流电机的发展过程,基本原理和结构。从无刷永磁直流电动机的基本原理和调速原理出发,设计出一个无刷永磁直流电机和系统。 二、进度安排及完成时间: 2月16日明确设计任务书和具体安排 2月20日下午设计任务书抽查 2月16日-3月6日查阅资料、撰写文献综述、撰写开题报告 3月6日抽查文献综述、开题报告撰写情况 3月7日-3月21日毕业实习、撰写实习报告 3月22日-5月29日毕业设计 4月底毕业设计中期检查 5月30日-6月15日撰写毕业设计说明书(论文) 6月16日毕业设计说明书抽查(论文) 6月16日-6月20日修改、装订毕业设计说明书、指导教师评阅 6月18日-6月26日毕业设计答辩(公开答辩、分组答辩)
前言 永磁无刷直流电动机由于没有换向火花,没有无线电干扰,既具有交流电动机的结构简单,运行可靠,维护方便等一系列优点,又具有直流电动机的运行效率高,无励磁损耗以及调速性能好等诸多特点,因此被广泛用于国民经济的各个领域,并且日益普及。所以,对于永磁无刷直流电动机的研究将是具有非常重要的意义.本文针对永磁无刷直流电动机所具有的各种优点 本课题对永磁无刷直流电动机的研究基于以下几个方面:无刷直流电机本体的研究, 气隙磁场和电磁转矩的研究, 电磁转矩的研究, 电气损耗的研究, 系统仿真的研究, 换向逻辑的问题的研究, 位置传感器的设计的研究. 但是,由于许多原因,无刷永磁直流电机还存在缺陷,并没有完全适应国民经济的发展,且电机的需求量在随着国民经济的迅猛增长而不断增大。由此可以看出,研究新型无刷直流电机是当务之急。 本课题主要从无刷永磁直流电动机的基本原理出发,阐述无刷永磁直流电动机的基本结构、控制和具体的应用,并且设计一台无刷永磁直流电动机。 本课题主要解决以下几个方面的问题:永磁无刷直流电动机的结构原理,电磁设计和具体应用.
对直流无刷电机的pid控制
PID闭环速度调节器采用比例积分微分控制 闭环速度调节器采用比例积分微分控制(简称PID控制),其输出是输入的比例、积分和微分的函数。PID调节器控制结构简单,参数容易整定,不必求出被控对象的数学模型,因此PID 调节器得到了广泛的应用。 PID调节器虽然易于使用,但在设计、调试无刷直流电机控制器的过程中应注意:PID调节器易受干扰、采样精度的影响,且受数字量上下限的影响易产生上下限积分饱和而失去调节作用。所以,在不影响控制精度的前提下对PID控制算法加以改进,关系到整个无刷直流电机控制器设计的成败。 2速度设定值和电机转速的获取 为在单片机中实现PID调节,需要得到电机速度设定值(通过A/D变换器)和电机的实际转速,这需要通过精心的设计才能完成。 无刷直流电机的实际转速可通过测量转子位置传感器(通常是霍尔传感器)信号得到,在电机转动过程中,通过霍尔传感器可以得到如图2所示的周期信号。 由图2可知,电机每转一圈,每一相霍尔传感器产生2个周期的方波,且其周期与电机转速成反比,因此可以利用霍尔传感器信号得到电机的实际转速。为尽可能缩短一次速度采样的时间,可测得任意一相霍尔传感器的一个正脉冲的宽度,则电机的实际转速为:但由于利用霍尔传感器信号测速,所以测量电机转速时的采样周期是变化的,低速时采样周期要长些,这影响了PID 调节器的输出,导致电机低速时的动态特性变差。解决的办法是将三相霍尔传感器信号相“与”,产生3倍于一相霍尔传感器信号频率的倍频信号,这样可缩短一次速度采样的时间,但得增加额外的硬件开销。直接利用霍尔传感器信号测速虽然方便易行,但这种测速方法对霍尔传感器在电机定子圆周上的定位有较严格的要求,当霍尔传感器在电机定子圆周上定位有误差时,相邻2个正脉冲的宽度不一致,会导致较大的测速误差,影响PID调节器的调节性能。若对测速精度要求较高时,可采用增量式光电码盘,但同样会增加了电路的复杂性和硬件的开销。 电机速度设定值可以通过一定范围内的电压来表示。系统中采用了串行A/D(如ADS7818)来实现速度设定值的采样。但在电机调速的过程中,电机控制器的功率输出部分会对A/D模拟输入电压产生干扰,进行抗干扰处理。 3非线性变速积分的PID算法 (1)PID算法的数字实现 离散形式的PID表达式为: 其中:KP,KI,KD分别为调节器的比例、积分和微分系数;E(k),E(k-1)分别为第k 次和k-1次时的期望偏差值;P(k)为第k次时调节器的输出。 比例环节的作用是对信号的偏差瞬间做出反应,KP越大,控制作用越强,但过大的KP会导致系统振荡,破坏系统的稳定性。积分环节的作用虽然可以消除静态误差,但也会降低系统的响应速度,增加系统的超调量,甚至使系统出现等幅振荡,减小KI可以降低系统的超调量,但会减慢系统的响应过程。微分环节的作用是阻止偏差的变化,有助于减小超调量,克服振荡,使系统趋于稳定,但其对干扰敏感,不利于系统的鲁棒性。 (2)经典PID算法的积分饱和现象 当电机转速的设定值突然改变,或电机的转速发生突变时,会引起偏差的阶跃,使|E(k)|增大,PID的输出P(k)将急剧增加或减小,以至于超过控制量的上下限Pmax,此时的实际控制量只能限制在Pmax,电机的转速M(k)虽然不断上升,但由于控制量受到限制,其增长的速度减慢,偏差E(k)将比正常情况下持续更长的时间保持在较大的偏差值,从而使得PID 算式中的积分项不断地得到累积。当电机转速超过设定值后,开始出现负的偏差,但由于积分项已有相当大的累积值,还要经过相当一段时间后控制量才能脱离饱和区,这就是正向积分饱和,反向积分饱和与此类似。解决的办法:一是缩短PID的采样周期(这一点单片机往往达不到),
PID算法在无刷直流电机调速电路中的应用
PID算法在无刷直流电机调速电路中的应用 摘 要:在分析了无刷直流电机闭环速度控制方案的基础上,针对PID算法在无刷直流电机应用中出现的种种问题,给出了相应的解决方法,提出了非线性变速 积分PID算法,成功地解决了在低采样周期时PID算法的积分饱和问题。 直流电机具有良好的调速性能,如无级调速、调速范围宽、低速性能好、高起动转矩、高效率等。无刷直流电机由于采用电子换向,PWM调速,在进一步提高直流电机性能的同时又克服了直流电机机械换向带来的一系列问题,从而大大延长了电机的使用寿命,近年来已广泛应用于家电、汽车、数控机床、机器人等领域。 1、无刷直流电机的速度控制方案 对无刷直流电机转速的控制即可采用开环控制,也可采用闭环控制。与开环控制相比,速度控制闭环系统的机械特性有以下优越性:闭环系统的机械特性与开环系统机械特性相比,其性能大大提高;理想空载转速相同时,闭环系统的静差 率(额定负载时电机转速降落与理想空载转速之比)要小得多;当要求的静差率相同时, 闭环调速系统的调速范围可以大大提高。无刷直流电机的速度控制方案如图1所示。 无刷直流电机控制器可采用电机控制专用DSP(如TI公司的TMS320C24X 系列、AD公司的ADMCxx系列),也可采用单片机+无刷直流电机控制专用集成电路的方案。前者集成度高,电路设计简单,运算速度快,可实现复杂的速度控制算法,但由于DSP的价格高而不适合于小功率低成本的无刷直流电机控制器。后者虽然运算速度低,但只要采用适当的速度控制算法,依然可以达到较高的控制精度,适合于小功率低成本的无刷直流电机控制器。 摩托罗拉公司的第二代无刷直流电机控制专用集成电路MC33035,集成了转子位置传感器译码器电路、脉宽调制电路(PWM)、功率输出驱动电路、限流电路,可以实现无刷直流电机速度开环系统的全部控制功能。系统中采用了一片MC33035、一片低成本的单片机AT89C2051、串行输入A/D、串行输出D/A 以及由MOSFET型场效应管组成的功率驱动电路,无刷电机控制逻辑和保护由MC33035完成,单片机用来完成转速设定值的获取、转速反馈的实时采样以及速度控制算法的实现。
直流无刷电机的控制系统设计方案
直流无刷电机的控制系统设计方案1 引言 1.1 题目综述 直流无刷电机是在有刷直流电机的基础上发展起来的,它不仅保留了有刷直流电机良好的调试性能,而且还克服了有刷直流电机机械换相带来的火花、噪声、无线电干扰、寿命短及制造成本高和维修困难等等的缺点。与其它种类的电机相比它具有鲜明的特征:低噪声、体积小、散热性能好、调试性能好、控制灵活、高效率、长寿命等一系列优点。基于这么多的优点无刷直流电机有了广泛的应用。比如电动汽车的核心驱动部件、电动车门、汽车空调、雨刮刷、安全气囊;家用电器中的DVD、VCD、空调和冰箱的压缩机、洗衣机;办公领域的传真机、复印机、碎纸机等;工业领域的纺织机械、医疗、印刷机和数控机床等行业;水下机器人等等诸多应用[1]。 1.2 国内外研究状况 目前,国内无刷直流电机的控制技术已经比较成熟,我国已经制定了GJB1863无刷直流电机通用规范。外国的一些技术和中国的一些技术大体相当,美国和日本的相对比较先进。当新型功率半导体器件:GTR、MOSFET、IGBT等的出现,以及钕铁硼、钐鈷等高性能永磁材料的出现,都为直流电机的应用奠定了坚实的基础。近些年来,计算机和控制技术快速发展。单片机、DSP、FPGA、CPLD等控制器被应用到了直流电机控制系统中,一些先进控制技术也同时被应用了到无刷直流电机控制系统中,这些发展都为直流电机的发展奠定了坚实的基础。 经过这么多年的发展,我国对无刷电机的控制已经有了很大的提高,但是与国外的技术相比还是相差很远,需要继续努力。所以对无刷直流电机控制系统的研究学习仍是国内的重要研究内容[2]。 1.3 课题设计的主要内容 本文以永磁方波无刷直流电机为控制对象,主要学习了电机的位置检测技术、电机的启动方法、调速控制策略等。选定合适的方案,设计硬件电路并编写程序调试,最终设计了一套无位置传感器的无刷直流电机调速系统。本课题涉及的技术概括如下:
航模全系列无刷电机绕线方法详解
航模全系列无刷电机绕 线方法详解 标准化工作室编码[XX968T-XX89628-XJ668-XT689N]
航模全系列无刷电机绕线方法详解 --------------------------------------------------------------------------------------------------------- --- 一模型无刷电机是无刷电机输入是直流,工作是交流,属于无刷直流电机之三相无感 (感应器-霍尔)电机。 二 N和P搭配的规律N:电机绕组槽 P:磁钢 1、N必须是3的倍数,P必须是偶数(磁钢必须是成对的,所以必须是偶数)。 2、N数越小,最高转速越高。比如9N12P电机最高转速肯定高于12N14P,反之亦然。 3、P数越小,最高转速越高。例如12N10P的最高转速肯定高于12N16P,反之亦然。 4、N比P大,则相对转速更高。9N6P最高转速肯定高于9N12P,反之亦然。 5、同样的N,P越大扭力越强。扭力,12N16P大于12N14P大于12N10P。 6、一般情况下,N和P之间不能整除,比如12N6P,但是内转子有大量的12N4P结构,使用分布绕组。 三三角接法和星形(Y)接法 三角接法:三根线头尾相接 1头+2尾,2头+3尾,3头+1尾 星形接法:三根线尾尾相接三相尾部接在一起,其他3根线引出接电机 绕线的顺序都是一样的,三角接法和星形接法只是最后接法不同而已!!! -------------------------------------------------------------------- 详解三角接法与星形接法 现代的无刷直流电机普遍采用星形绕法,但是模型无刷电机普遍采用三角绕法? 例如:一台2212 1400KV电机(默认三角绕法)改用星形绕法,转速将变为1400除以得出808KV,并且该电机在12V电压下工作功率大为降低,如要实现之前功率,需要提高电压到12V*=21V,在21V电压下和之前的功率相近。 同样的,一台星形绕法的无刷电机,如需要保持转速和功率不变,在改为三角绕法后,需要降低电压倍使用,否则极易烧坏电机。 星形绕法的特点:效率更高、匝数更少、其他数据一样情况下工作电压更高 三角绕法的特点:匝数更多,其他数据一样的情况下工作电压更低 实际运用:3S电机改6S电机,最简单的办法就是将三角绕法改为星形绕法即可。 总体上,Y星接法(也就是星型接法)在效率上优于封闭接法(也就是三角接法),但是因为方便工业生产的关系,模型大量使用三角接法。 四线径、股数、匝数 线径:漆包线直径(一般是包括漆皮的) 股数:绕线时多股线一起绕的根数 匝数:每个电极上所绕的圈数 *4*13圈(线径*股数*匝数) T:匝数 绕线顺和逆 定子尾部朝下,上面朝天。 顺:绕线顺时针
航模电机入门知识
航模电机问答 1、什么叫电机? 答:电机是将电池电能转换成机械能,驱动电动车车轮旋转的部件。 2、什么是定子? 答:有刷或无刷电机工作时不转动的部分。轮毂式有刷或无刷无齿电机的电机轴叫定子,此种电机可以叫内定子电机。 3、什么是转子? 答:有刷或无刷电机工作时转动的部分。轮毂式有刷或无刷无齿电机的外壳叫转子,此种电机可以叫外转子电机。 4、什么叫碳刷? 答:有刷电机里面顶在换相器表面,电机转动的时候,将电能通过换相器输送给线圈,由于其主要成分是碳,称为碳刷,它是易磨损的。应定期维护更换,并清理积碳。 5、什么是刷握? 答:在有刷电机里面盛装并保持碳刷位置的机械导槽。 6、什么是换相器? 答:有刷电机里面,具有相互绝缘的条状金属表面,随电机转子转动时,条状金属交替接触电刷的正负极,实现电机线圈电流方向的正负交替变化,完成有刷电机线圈的换相。 7、什么是相序? 答:无刷电机线圈的排列顺序。 8、什么是磁钢? 答:一般用于称呼高磁场强度的磁性材料,电动车电机都采用钕铁硼稀土磁钢。 9、什么是有刷电机? 答:电机工作时,线圈和换向器旋转,磁钢和碳刷不转,线圈电流方向的交替变化是*随电机转动的换相器和电刷来完成的。在电动车行业有刷电机分高速有刷电机和低速有刷电机。有刷电机和无刷电机有很多区别,从名字上可以看出有刷电机有碳刷,无刷电机没有碳刷。 10、什么是无刷电机? 答:由控制器提供不同电流方向的直流电来达到电机里面线圈电流方向的交替变化,无刷电机的转子和定子之间没有电刷和换相器。 11、电机如何实现换相? 答:无刷或有刷电机在转动时,电机里面线圈的通电方向需要交替变换,从而达到电机能连续转动。有刷电机的换相*换相器和电刷共同完成,无刷电机*控制器来完成。
无刷直流永磁电动机设计流程和实例
无刷直流永磁电动机设计实例 一. 主要技术指标 1. 额定功率:W 30P N = 2. 额定电压:V U N 48=,直流 3. 额定电流:A I N 1< 3. 额定转速:m in /10000r n N = 4. 工作状态:短期运行 5. 设计方式:按方波设计 6. 外形尺寸:m 065.0036.0?φ 二. 主要尺寸的确定 1. 预取效率63.0='η、 2. 计算功率i P ' 直流电动机 W P K P N N m i 48.4063 .030 85.0'=?= = η,按陈世坤书。 长期运行 N i P P ?'' += 'ηη321 短期运行 N i P P ?'' += 'η η431 3. 预取线负荷m A A s /11000'= 4. 预取气隙磁感应强度T B 55.0'=δ 5. 预取计算极弧系数8.0=i α 6. 预取长径比(L/D )λ′=2
7.计算电枢内径 m n B A P D N s i i i 233 11037.110000 255.0110008.048 .401.61.6-?=?????=''''='λαδ 根据计算电枢内径取电枢内径值m D i 21104.1-?= 8. 气隙长度m 3107.0-?=δ 9. 电枢外径m D 211095.2-?= 10. 极对数p=1 11. 计算电枢铁芯长 m D L i 221108.2104.12--?=??='='λ 根据计算电枢铁芯长取电枢铁芯长L= m 2108.2-? 12. 极距 m p D i 22 1 102.22 104.114.32--?=??==πτ 13. 输入永磁体轴向长m L L m 2108.2-?== 三.定子结构 1. 齿数 Z=6 2. 齿距 m z D t i 22 1 10733.06 104.114.3--?=??==π 3. 槽形选择 梯形口扇形槽,见下图。 4. 预估齿宽: m K B tB b Fe t t 2210294.096 .043.155 .010733.0--?=???==δ ,t B 可由 设计者经验得1.43T ,t b 由工艺取m 210295.0-? 5. 预估轭高: m B K B a K lB h j Fe i Fe j j 211110323.056 .196.0255 .08.02.222-?=????=≈Φ= δδτ