机器人运动学及动力学的数学模型

用平面二连杆机器人为例贯穿运动学、雅可比、动力学、轨迹规划甚至控制与编程分析
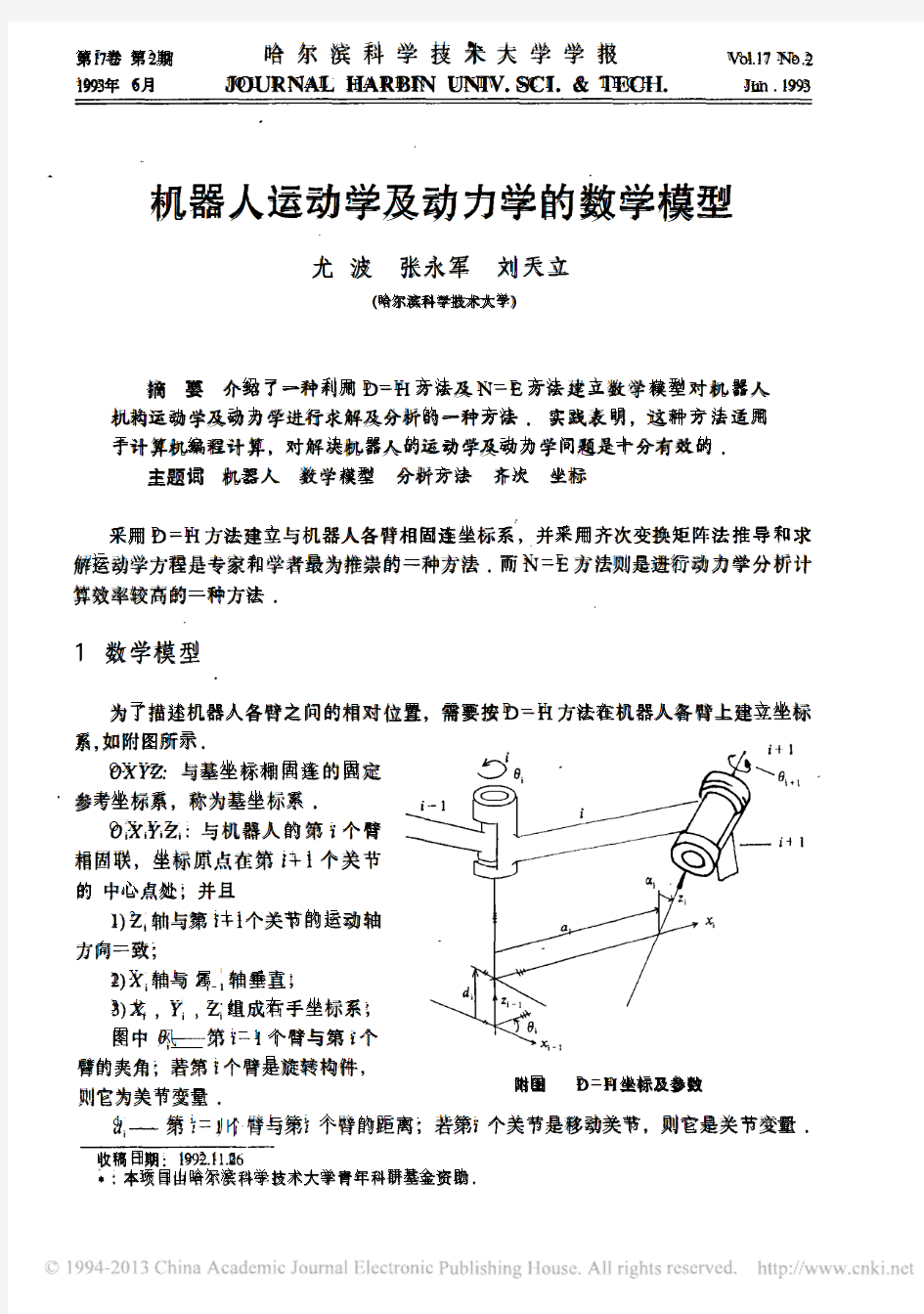
一、平面二连杆机器人手臂运动学 平面二连杆机械手臂如图1所示,连杆1长度1l ,连杆2长度2l 。建立如图1所示的坐标系,其中,),(00y x 为基础坐标系,固定在基座上,),(11y x 、),(22y x 为连体坐标系,分别固结在连杆1和连杆2上并随它们一起运动。关节角顺时针为负逆时针为正。 图1平面双连杆机器人示意图 1、用简单的平面几何关系建立运动学方程 连杆2末段与中线交点处一点P 在基础坐标系中的位置坐标: ) sin(sin )cos(cos 2121121211θθθθθθ++=++=l l y l l x p p (1) 2、用D-H 方法建立运动学方程 假定0z 、1z 、2z 垂直于纸面向里。从),,(000z y x 到),,(111z y x 的齐次旋转变换矩阵为: ?? ??? ???????-=100 010000cos sin 00sin cos 1 111 01θθ θθT (2) 从),,(111z y x 到),,(222z y x 的齐次旋转变换矩阵为: ?? ??? ???????-=100 010000cos sin 0sin cos 2 212212 θθ θθl T (3) 从),,(000z y x 到),,(222z y x 的齐次旋转变换矩阵为:
? ???? ???????+++-+=?? ??? ? ? ?? ???-?????????????-=?=10000100sin 0)cos()sin(cos 0)sin()cos( 1000010 000cos sin 0sin cos 1000 010000cos sin 00sin cos 1121211121212212 2111 1120102θθθθθθθθθθθθθθθθ θθl l l T T T (4) 那么,连杆2末段与中线交点处一点P 在基础坐标系中的位置矢量为: ? ?? ? ? ???????=????????????++++=? ? ? ?? ? ?????????????? ?? ???+++-+=?=110)sin(sin )cos( cos 10010000100sin 0)cos()sin(cos 0)sin()cos( 212112121121121211121212 020p p p z y x l l l l l l l P T P θθθθθθθθθθθθθθθθ (5) 即, ) sin(sin )cos(cos 2121121211θθθθθθ++=++=l l y l l x p p (6) 与用简单的平面几何关系建立运动学方程(1)相同。 建立以上运动学方程后,若已知个连杆的关节角21θθ、,就可以用运动学方程求出机械手臂末端位置坐标,这可以用于运动学仿真。 3、平面二连杆机器人手臂逆运动学 建立以上运动学方程后,若已知个机械臂的末端位置,可以用运动学方程求出机械手臂二连杆的关节角21θθ、,这叫机械臂的逆运动学。逆运动学可以用于对机械臂关节角和末端位置的控制。对于本例中平面二连杆机械臂,其逆运动学方程的建立就是已知末端位置 ),(p p y x 求相应关节角21θθ、的过程。推倒如下。 (1)问题 ) sin(sin )cos(cos 2121121211θθθθθθ++=++=l l y l l x p p 已知末端位置坐标),(p p y x ,求关节角21θθ、。 (2)求1θ
基于D-H模型的机器人运动学参数标定方法
基于D-H模型的机器人运动学参数标定方法 摘要:通用机器人视觉检测站中的机器人是整个测量系统中产生误差的最主要环节,而机器人的连杆参数误差又是影响其绝对定位精度的最主要因素。借助高精度且可以实现绝对坐标测量的先进测量设备——激光跟踪仪,及其功能强大的CAM2 Measure 4.0配套软件,并利用串联六自由度机器人运动的约束条件,重新构建起D-H模型坐标系,进而对运动学参数进行修正,获得关节变量与末端法兰盘中心位置在基坐标系下的准确映射关系,以提高机器人的绝对定位精度,最后通过进一步验证,证明取得了较为理想的标定结果。 关键词:视觉检测站;工业机器人;绝对定位精度;激光跟踪仪;D-H模型; Robot kinematic parameters calibration based on D-H model Wang Yi (State key laboratory of precision measuring technology and instruments, Tianjin University, 300072,China) Abstract:Robot for universal robot visual measurement station is the most primary part causing errors in the entire system and link parameter errors of industrial robot have a great influence on accuracy. Employing laser tracker, which can offer highly accurate measurement and implement ADM (absolute distance measurement), as well as relevant software, making use of movement constrain of series-wound six-degree robot, D-H model coordinates were rebuilt. Accordingly, kinematic parameters were modified, and precise mapping from joint variables to the center of the end-effector in base coordinate was obtained and accuracy got improved. At last, result is proved acceptable by validation. Keywords: visual measurement station; industrial robot; accuracy; laser tracker; D-H model; 引言:随着立体视觉技术的不断完善与发展,利用机器人的柔性特点,发展基于立体视觉的通用测量机器人三维测试技术逐渐成为各大机器人生产厂家非常重视的市场领域。机器人的运动精度对于工业机器人在生产中的应用可靠性起着至关重要的作用。机器人各连杆的几何参数误差是造成机器人系统误差的主要环节,它主要是由于制造和安装过程中产生的连杆实际几何参数与理论参数值之间的偏差造成的。通常,机器人以示教再现的方式工作,轨迹设定好之后,只在某些固定点之间运动,这种需求使得机器人的重复性精度被设计得很高,可以达到0.1毫米以下,但是绝对定位精度很差,可以到2、3毫米,甚至更大[1]。常见的标定方法可分为三类:一、建立微分运动学模型,然后借助标定工具测量一定数目的机器人姿态,最后用反向求解的方法得到真实值与名义值之间的偏差[2]。二、使用标定工具获得一系列姿态的数据,然后对数据用线性或非线性迭代求解的方法得到机器人几何参数的修正值[3],[4]。 三、建立机器人运动学模型,用直接测量的方法修正模型参数[5],[6],[7],[8]。最近,世界著名工业机器人生厂商ABB公司运用了莱卡激光跟踪仪以保证其产品的精度。使用激光跟踪仪标定机器人不再需要其它的测量工具,从而也就省去了标定测量工具的繁琐工作;同时,这一方法是对机器人的各个运动学几何参数进行修正,结果会使机器人在整个工作空间内的位姿得到校准,而不会像用迭代求解的方法那样,只是对某些测量姿态进行优化拟合,可能会造成在非测量点处残留比较大的误差;再者,随着机器人的机械磨损,机器人的运动学参数需要重新标定,而激光跟踪仪测量系统配置起来简单,特别适合于工业现场标定。正是鉴于以
仿人机器人运动学和动力学分析
国防科学技术大学 硕士学位论文 仿人机器人运动学和动力学分析 姓名:王建文 申请学位级别:硕士 专业:模式识别与智能系统 指导教师:马宏绪 20031101
能力;目前,ASIMO代表着仿人机器人研究的最高水平,见图卜2。2000年,索尼公司也推出了自己研制的仿人机器人SDR一3X,2002年又研制出了SDR一4X,见图卜3。日本东京大学也一直在进行仿人机器人的研究,与Kawada工学院合作相继研制成功了H5、H6和H7仿人机器人,其中H6机器人高1.37米,体重55公斤,具有35个自由度,目前正在开发名为Isamu的新一代仿人机器人,其身高1.5米,体重55公斤,具有32个自由度。日本科学技术振兴机构也在从事PINO机器人的研究,PINO高0.75米,采用29个电机驱动,见图卜4。日本Waseda大学一直在从事仿人机器人研究计划,研制的wL系列仿人机器人和WENDY机器人在机器人界有很大的影响,至今已投入100多万美元,仍在研究之中。Tohoku大学研制的Saika3机器人高1.27米,重47公斤,具有30个自由度。美国的MIT和剑桥马萨诸塞技术学院等单位也一直在从事仿人机器人研究。德国、英国和韩国等也有很多单位在进行类似的研究。 图卜1P2机器人图卜2ASIMO机器人图1.3SDR-4X机器人图1-4PINO机器人 图卜5第一代机器人图l-6第二代机器人图1.7第三代机器人图1—8第四代机器人 在国家“863”高技术计划和自然科学基金的资助下,国内也开展了仿人机器人的研究工作。目前,国内主要有国防科技大学、哈尔滨工业大学和北京理工大学等单位从事仿人机器人的研究。国防科技大学机器人实验室研制机器人已有10余年的历史,该实验室在这期间分四阶段推出了四代机器人,其中,2000年底推出的仿人机器入一“先行者”一是国内第一台仿人机器人。2003年6月,又成功研制了一台具有新型机械结构和运动特性的仿人机器人,这台机器人身高1.55米,体重63.5公斤,共有36个自由度,脚踝有力 第2页
用平面三连杆机器人为例贯穿运动学、雅可比、动力学、轨迹规划甚至控制与编程
精心整理 一、平面二连杆机器人手臂运动学 平面二连杆机械手臂如图1所示,连杆1长度1l ,连杆2长度2l ,连杆3长度为3l 。建立如图1所示的坐标系,其中,),(00y x 为基础坐标系,固定在基座上,),(11y x 、),(22y x 、33(,)x y 为连体坐标系,分别固结在连杆1、连杆2、连杆3上并随它们一起运动。关节角顺时针为负逆时针为正。 1 θ 图11112123123p p x y 2、用D-H 方法建立运动学方程 假定0z 、1z 、2z 垂直于纸面向外。从),,(000z y x 到),,(111z y x 的齐次旋转变换矩阵为: ?? ??? ???????-=100 010000cos sin 00sin cos 1 11101 θθ θθT (2)
从),,(111z y x 到),,(222z y x 的齐次旋转变换矩阵为: ?? ??? ???????-=100 010000cos sin 0sin cos 2 212212θθ θθl T (3) 从222(,,)x y z 到333(,,)x y z 的齐次旋转变换矩阵为: 33212cos sin 0l T θθ-????=从(003T =003P =结论:(6)与用简单的平面几何关系建立运动学方程(1)相同。 补充:正解用于仿真,逆解用于控制 建立以上运动学方程后,若已知个连杆的关节角123θθθ、、,就可以用运动学方程求出机械手臂末端位置坐标,这可以用于运动学仿真。 3、平面二连杆机器人手臂逆运动学 二、平面二连杆机器人手臂的速度雅可比矩阵 速度雅可比矩阵的定义:从关节速度向末端操作速度的线性变换。现已二连杆平面机器人为例推导速度雅可比矩阵。 上面的运动学方程两边对时间求导,得到下面的速度表达式:
SCARA机器人的运动学分析
电子科技大学 实验报告 学生姓名: 一、实验室名称:机电一体化实验室 二、实验项目名称:实验三SCARA 学号: 机器人的运动学分析 三、实验原理: 机器人正运动学所研究的内容是:给定机器人各关节的角度,计算机器人末端执行器相对于参考坐标系的位置和姿态问题。 各连杆变换矩阵相乘,可得到机器人末端执行器的位姿方程(正运动学方程) 为: n x o x a x p x 0T40T1 11T2 22T3 d3 n y o y a y p y ( 1-5)3T4 4= o z a z p z n z 0001 式 1-5 表示了 SCARA 手臂变换矩阵0 T4,它描述了末端连杆坐标系{4} 相对基坐标系 {0} 的位姿,是机械手运动分析和综合的基础。 式中: n x c1c2c4s1 s2 c4 c1 s2s4s1 c2 s4,n y s1c2 c4c1 s2 c4s1 s2 s4c1c2 s4 n z0 , o x c1c2 s4s1 s2 s4 c1 s2 c4s1c2c4 o y s1c2 s4c1 s2 s4s1 s2 c4c1c2c4 o z0 , a x0 , a y0 , a z1 p x c1 c2 l2s1s2l 2c1l 1, p y s1c2 l 2 c1 s2 l 2 s1l1, p z d3 机器人逆运动学研究的内容是:已知机器人末端的位置和姿态,求机器人对应于这个位置和姿态的全部关节角,以驱动关节上的电机,从而使手部的位姿符合要求。与机器人正运动学分析不同,逆问题的解是复杂的,而且具有多解性。
1)求关节 1: 1 A arctg 1 A 2 l 12 l 22 p x 2 p y 2 arctg p x 式中:A p x 2 ; p y 2l 1 p y 2 2)求关节 2: 2 r cos( 1 ) arctg ) l 1 r sin( 1 式中 : r p x 2 p y 2 ;arctg p x p y 3). 求 关节变 量 d 3 令左右矩阵中的第三行第四个元素(3.4)相等,可得: d 3 p z 4). 求 关节变 量 θ 4 令左右矩阵中的第二行第一个元素(1.1,2.1 )相等,即: sin 1 n x cos 1n y sin 2 cos 4 cos 2 sin 4 由上式可求得: 4 arctg ( sin 1 n x cos 1 n y )2 cos 1 n x sin 1 n y 四、实验目的: 1. 理解 SCARA 机器人运动学的 D-H 坐标系的建立方法; 2. 掌握 SCARA 机器人的运动学方程的建立; 3. 会运用方程求解运动学的正解和反解; ( 1-8) ( 1-9) ( 1-10 )
六自由度机器人运动分析及优化
本 科 毕 业 论 文(设 计) 题目(中文 学学 完 成 日 期 2017 年 3 月
摘要 当今世界,工业化日趋成熟,机器人被广泛的应用于各行各业,最常用到的有四自由度,六自由度机器人。其中,自动化水平较高的汽车制造业和电子装配业经常常常要使用到六自由度机器人。因此对其实施运动学分析,是进行科学设计的基础,也是降低机器人生产成本,优化机器人运动轨迹的前提。此外,运动分析过程有效的模拟了机器人运动的真实情况,有助于提供有效可行的优化方案。本文主要探讨六自由度机器人的运动分析,基于经典运动学以及动力学的研究方法概念,首先通过solidworks做出机械臂各部分零件的三维图,然后通过SolidWorks装配出六自由度机器人机械臂的三维模型。通过该模型,选取其中一个关节和底座,并用SolidWorks进行运动学分析,对六自由度机器人的运动学和动力学计算方法进行了仿真验证。最后得到六自由度机器人的其中一个自由度的运动仿真实例。通过对该运动仿真实例的分析,得出最佳优化方案,优化机器人的运动轨迹提高机器人的工作效率,降低机器人生产成本。 关键词:六自由度机器人;运动分析;运动学;动力学;
目录 摘要 ...................................................................................................................... I Abstract ............................................................................... 错误!未定义书签。 1 绪论 (1) 1.1课题背景及研究的目的和意义 (1) 1.2机器人国内外发展现状及前景展望--------------------------1 2 六自由度机器人运动学分析 (3) 2.1六自由度机器人的结构-------------------------------------1 2.2运动学分析----------------------------------------------1 3 六自由度机器人动力学分析 (5) 3.1综述----------------------------------------------------3 3.2机器人动力学研究方法------------------------------------3 3.2.1几项假设-------------------------------------------3 3.2.2目标-----------------------------------------------4 3.2.3数学工具-------------------------------------------5 3.3动力学原理----------------------------------------------3 3.3.1动量矩定理---------------------------------------------------------------6 3.3.2能量守恒定理--------------------------------------6 3.3.3牛顿—欧拉方程------------------------------------7 3.3.4达朗贝尔原理--------------------------------------8 3.3.5拉格朗日方程--------------------------------------9 4 六自由度机器人运动分析 (8) 4.1运动分析的软件背景---------------------------------------3 4.2运用solidworks建立六度机器人机械臂三维模型--------------9 4.3运用Solidworks对进行运动学分析-------------------------4 5 结论 (14)
机器人机械臂运动学分析(仅供借鉴)
平面二自由度机械臂动力学分析 [摘要] 机器臂是一个非线性的复杂动力学系统。动力学问题的求解比较困难,而且需要较长的运算时间,因此,这里主要对平面二自由度机械臂进行动力学研究。本文采用拉格朗日方程在多刚体系统动力学的应用方法分析平面二自由度机械臂的正向动力学。经过研究得出平面二自由度机械臂的动力学方程,为后续更深入研究做铺垫。 [关键字] 平面二自由度 一、介绍 机器人是一个非线性的复杂动力学系统。动力学问题的求解比较困难,而且需要较长的运算时间,因此,简化解的过程,最大限度地减少工业机器人动力学在线计算的时间是一个受到关注的研究课题。 机器人动力学问题有两类: (1) 给出已知的轨迹点上的,即机器人关节位置、速度和加速度,求相应的关节力矩向量Q r。这对实现机器人动态控制是相当有用的。 (2) 已知关节驱动力矩,求机器人系统相应的各瞬时的运动。也就是说,给出关节力矩向量τ,求机器人所产生的运动。这对模拟机器人的运动是非常有用的。 二、二自由度机器臂动力学方程的推导过程 机器人是结构复杂的连杆系统,一般采用齐次变换的方法,用拉格朗日方程建立其系统动力学方程,对其位姿和运动状态进行描述。机器人动力学方程的具体推导过程如下: (1) 选取坐标系,选定完全而且独立的广义关节变量θr ,r=1, 2,…, n。 (2) 选定相应关节上的广义力F r:当θr是位移变量时,F r为力;当θr是角度变量时, F r为力矩。 (3) 求出机器人各构件的动能和势能,构造拉格朗日函数。 (4) 代入拉格朗日方程求得机器人系统的动力学方程。 下面以图1所示说明机器人二自由度机械臂动力学方程的推导过程。
机器人学得一个正运动学的例子
PUMA 560 运动分析(表示) 1 正解 PUMA 560是属于关节式机器人,6个关节都是转动关节。前3个关节确定手腕参考点的位置,后3个关节确定手腕的方位。 各连杆坐标系如图1所示。相应的连杆参数列于表1。 图1机器人模型 PUMA560每个关节均有角度零位与正负方向限位开关,机器人的回转机体实现机器人机体绕0z 轴的回转(角1θ),它由固定底座和回转工作台组成。安装在轴中心的驱动电机经传动装置,可以实现工作台的回转。大臂、小臂的平衡由机器人中的平衡装置控制,在机器人的回转工作台上安装有大臂台座,将大臂下端关节支承在台座上,大臂的上端关节用于支承小臂。大臂臂体的下端安有直流伺服电机,可控制大臂上下摆动(角2θ) 。小臂支承于大臂臂体的上关节处,其驱动电机可带动小臂做上下俯仰(角3θ),以及小臂的回转(4θ)。机器人的腕部位于小臂臂体前端,通过伺服电动机传动,可实现
腕部摆动(5θ)和转动(6θ)。 下图为简化模型: 图2机器人简化模型 表1 机械手的末端装置即为连杆6的坐标系,它与连杆坐标系的关系可由16i T -表示: 1 616i i i T A A A -+= (1) 可得连杆变换通式为: 111111111100001i i i i i i i i i i i i i i i i i i i c s a s c c c s d s T s s c s c d c θθθαθαααθαθααα-----------????--? ?=???? ?? (2) 据连杆变换通式式(2)和表1所示连杆参数,可求得各连杆变换矩阵如下: 1 616 i i i T A A A -+=
FANUC 机械手资料相关 机器人正运动学方程的D-H表示法
2.8机器人正运动学方程的D-H表示法 在1955年,Denavit和Hartenberg在“ASME Journal of Applied Mechanics”发表了一篇论文,后来利用这篇论文来对机器人进行表示和建模,并导出了它们的运动方程,这已成为表示机器人和对机器人运动进行建模的标准方法,所以必须学习这部分内容。Denavit-Hartenberg(D-H)模型表示了对机器人连杆和关节进行建模的一种非常简单的方法,可用于任何机器人构型,而不管机器人的结构顺序和复杂程度如何。它也可用于表示已经讨论过的在任何坐标中的变换,例如直角坐标、圆柱坐标、球坐标、欧拉角坐标及RPY坐标等。另外,它也可以用于表示全旋转的链式机器人、SCARA机器人或任何可能的关节和连杆组合。尽管采用前面的方法对机器人直接建模会更快、更直接,但D-H表示法有其附加的好处,使用它已经开发了许多技术,例如,雅克比矩阵的计算和力分析等。 假设机器人由一系列关节和连杆组成。这些关节可能是滑动(线性)的或旋转(转动)的,它们可以按任意的顺序放置并处于任意的平面。连杆也可以是任意的长度(包括零),它可能被弯曲或扭曲,也可能位于任意平面上。所以任何一组关节和连杆都可以构成一个我们想要建模和表示的机器人。 为此,需要给每个关节指定一个参考坐标系,然后,确定从一个关节到下一个关节(一个坐标系到下一个坐标系)来进行变换的步骤。如果将从基座到第一个关节,再从第一个关节到第二个关节直至到最后一个关节的所有变换结合起来,就得到了机器人的总变换矩阵。在下一节,将根据D-H表示法确定一个一般步骤来为每个关节指定参考坐标系,然后确定如何实现任意两个相邻坐标系之间的变换,最后写出机器人的总变换矩阵。
机器人学第六章(机器人运动学及动力学)
第六章 机器人运动学及动力学 6.1 引论 到现在为止我们对操作机的研究集中在仅考虑动力学上。我们研究了静力位置、静力和速度,但我们从未考虑过产生运动所需的力。本章中我们考虑操作机的运动方程式——由于促动器所施加的扭矩或作用在机械手上的外力所产生的操作机的运动之情况。 机构动力学是一个已经写出很多专著的领域。的确,人们可以花费以年计的时间来研究这个领域。显然,我们不可能包括它所应有的完整的内容。但是,某种动力学问题的方程式似乎特别适合于操作机的应用。特别是,那种能利用操作机的串联链性质的方法是我们研究的天然候选者。 有两个与操作机动力学有关的问题我们打算去解决。向前的动力学问题是计算在施加一 组关节扭矩时机构将怎样运动。也就是,已知扭矩矢量τ,计算产生的操作机的运动Θ、Θ 和Θ 。这个对操作机仿真有用,在逆运动学问题中,我们已知轨迹点Θ、Θ 和Θ ,我们欲求出所需要的关节扭矩矢量τ。这种形式的动力学对操作机的控制问题有用。 6.2 刚体的加速度 现在我们把对刚体运动的分析推广到加速度的情况。在任一瞬时,线速度矢量和角速度矢量的导数分别称为线加速度和角加速度。即 B B Q Q B B Q Q 0V ()V ()d V V lim dt t t t t t ?→+?-==? (6-1) 和 A A Q Q A A Q Q 0()()d lim dt t t t t t ?→Ω+?-ΩΩ=Ω=? (6-2) 正如速度的情况一样,当求导的参坐标架被理解为某个宇宙标架{}U 时我们将用下面的记号 U A AORG V V = (6-3) 和 U A A ω=Ω (6-4)
6.2.1 线加速度 我们从描述当原点重合时从坐标架{}A 看到的矢量B Q 的速度 A A B A A Q B Q B B V V B R R Q =+Ω? (6-5) 这个方程的左手边描述A Q 如何随时间而变化。所以,因为原点是重合的,我们可以重写(6-5)为 A A B A A B B Q B B d ()V dt B B R Q R R Q =+Ω? (6-6) 这种形式的方程式当推导对应的加速度方程时特别有用。 通过对(6-5)求导,我们可以推出当{}A 与{}B 的原点重合时从{}A 中看到的B Q 的 加速度表达式 A A B A A A A Q B Q B B B B d d V (V )()dt dt B B R R Q R Q =+Ω?+Ω? (6-7) 现在用(6-6)两次── 一次对第一项,一次对最后一项。(6-7)式的右侧成为: A B A A A A B Q B B Q B B A A A A B B Q B B V () +Ω?+Ω?+Ω?+Ω? B B B B R R V R Q R V R Q (6-8) 把相同两项合起来 A B A A A A B Q B B Q B B A A A B B B V 2 () +Ω?+Ω?+Ω?Ω? B B B R R V R Q R Q (6-9) 最后,为了推广到原点不重合的情况,我们加上一项给出{}B 的原点的线加速度的项,得到下面的最后的一般公式 A B A A A A BORG B Q B B Q B B A A A B B B V 2 () ++Ω?+Ω?+Ω?Ω? A B B B V R R V R Q R Q (6-10) 对于我们将在本章上考虑的情况,我们总是有B Q 为不变,或 B Q Q V 0== B V (6-11) 所以,(6-10)简化为 A A A A A A Q BORG B B B B B V ()=+Ω?Ω?+Ω? A B B V R Q R Q (6-12) 我们将用这一结果来计算操作机杆件的线加速度。 6.2.2 角加速度 考虑{}B 以A B Ω相对于{}A 转动的情况,而{}C 以B C Ω相对于{}B 转动。为了计算 A C Ω我们把矢量在坐标架{}A 中相加
基于动力学模型的轮式移动机器人运动控制_张洪宇
文章编号:1006-1576(2008)11-0079-04 基于动力学模型的轮式移动机器人运动控制 张洪宇,张鹏程,刘春明,宋金泽 (国防科技大学机电工程与自动化学院,湖南长沙 410073) 摘要:目前,对不确定非完整动力学系统进行设计的主要方法有自适应控制、预测控制、最优控制、智能控制等。结合WMR动力学建模理论的研究成果,对基于动力学模型的WMR运动控制器的设计和研究进展进行综述,并分析今后的重点研究方向。 关键词:轮式移动机器人;动力学模型;运动控制;非完整系统 中图分类号:TP242.6; TP273 文献标识码:A Move Control of Wheeled Mobile Robot Based on Dynamic Model ZHANG Hong-yu, ZHANG Peng-cheng, LIU Chun-ming, SONG Jin-ze (College of Electromechanical Engineering & Automation, National University of Defense Technology, Changsha 410073, China) Abstract: At present, methods of non-integrity dynamic systems design mainly include adaptive control, predictive control, optimal control, intelligence control and so on. Based on analyzing the recent results in modeling of WMR dynamics, a survey on motion control of WMR based on dynamic models was given. In addition, future research directions on related topics were also discussed. Keywords: Wheeled mobile robot; Dynamic model; Motion control; Non-integrity system 0 引言 随着生产的发展和科学技术的进步,移动机器人系统在工业、建筑、交通等实际领域具有越来越广泛的应用和需求。进入21世纪,随着移动机器人应用需求的扩大,其应用领域已从结构化的室内环境扩展到海洋、空间和极地、火山等环境。较之固定式机械手,移动机器人具有更广阔的运动空间,更强的灵活性。移动机器人的研究必须解决一系列问题,包括环境感知与建模、实时定位、路径规划、运动控制等,而其中运动控制又是移动机器人系统研究中的关键问题。故结合WMR动力学建模理论的研究成果,对基于动力学模型的WMR运动控制器设计理论和方法的研究进展进行研究。 1 WMR动力学建模 有关WMR早期的研究文献通常针对WMR的运动学模型。但对于高性能的WMR运动控制器设计,仅考虑运动学模型是不够的。文献[1]提出了带有动力小脚轮冗余驱动的移动机器人动力学建模方法,以及WMR接触稳定性问题和稳定接触条件。文献[2]提出一种新的WMR运动学建模的方法,这种方法是基于不平的地面,从每个轮子的雅可比矩阵中推出一个简洁的方程,在这新的方程中给出了车结构参数的物理概念,这样更容易写出从车到接触点的转换方程。文献[3]介绍了与机器人动作相关的每个轮子的雅可比矩阵,与旋转运动的等式合并得出每个轮子的运动方程。文献[4]基于LuGre干摩擦模型和轮胎动力学提出一种三维动力学轮胎/道路摩擦模型,不但考虑了轮胎的径向运动,同时也考虑了扰动和阻尼摩擦下动力学模型,模型不但可以应用在轮胎/道路情况下,也可应用在对车体控制中。在样例中校准模型参数和证实了模型,并用于广泛应用的“magic formula”中,这样更容易估计摩擦力。在文献[5]中同时考虑运动学和动力学约束,其中提出新的计算轮胎横向力方法,并证实了这种轮胎估计的方法比线性化的轮胎模型好,用非线性模型来模拟汽车和受力计算,建立差动驱动移动机器人模型,模型本身可以当作运动控制器。 2 WMR运动控制器设计的主要发展趋势 在WMR控制器设计中,文献[6]给出了全面的分析,WMR的反馈控制根据控制目标的不同,可以大致分为3类:轨迹跟踪(Trajectory tracking)、路径跟随(Path following)、点镇定(Point stabilization)。轨迹跟踪问题指在惯性坐标系中,机器人从给定的初始状态出发,到达并跟随给定的参考轨迹。路径跟随问题是指在惯性坐标系中,机器人从给定的初始状态出发,到达并跟随指定的几何 收稿日期:2008-05-19;修回日期:2008-07-16 作者简介:张洪宇(1978-)男,国防科学技术大学在读硕士生,从事模式识别与智能系统研究。 ,
【发那科FANUC机器人】机器人学得一个正运动学的例子
1 PUMA 560 运动分析(表示) 1 正解 PUMA 560是属于关节式机器人,6个关节都是转动关节。前3个关节确定手腕参考点的位置,后3个关节确定手腕的方位。 各连杆坐标系如图1所示。相应的连杆参数列于表1。 图 1 机器人模型 PUMA560每个关节均有角度零位与正负方向限位开关,机器人的回转机体实现机器人机体绕0z 轴的回转(角1 ),它由固定底座和回转工作台组成。安装在轴中心的驱动电机经传动装置,可以实现工作台的回转。大臂、小臂的平衡由机器人中的平衡装置控制,在机器人的回转工作台上安装有大臂台座,将大臂下端关节支承在台座上,大臂
2 的上端关节用于支承小臂。大臂臂体的下端安有直流伺服电机,可控制大臂上下摆动(角 2θ)。小臂支承于大臂臂体的上关节处,其驱动电机可带动小臂做上下俯仰(角3θ),以及小臂的回转(4θ)。机器人的腕部位于小臂臂体前端,通过伺服电动机传动,可实现腕部摆动(5θ)和转动(6θ)。 下图为简化模型: 图 2 机器人简化模型 表1 机械手的末端装置即为连杆6的坐标系,它与连杆坐标系的关系可由16i T -表示: 1 616i i i T A A A -+= (1) 1 616 i i i T A A A -+=
3 可得连杆变换通式为 : 1 1 1111 111100 00 1i i i i i i i i i i i i i i i i i i i c s a s c c c s d s T s s c s c d c θθθαθαααθαθααα-----------?? ??--??=?? ? ??? (2) 据连杆变换通式式(2)和表1所示连杆参数,可求得各连杆变换矩阵如下: 11221 120 1 12223324433 342 3 3444554 555000 000001001000000100010000001001000000100010 00010000 c s c s s c d T T s c c s a c s a s c d T T s c c s T s c θθθθθθθθθθθθθθθθθθθθ--??????????? ?==?? ?? --?? ??????--?? ????????? ?==?? ?? --????????--=665 66600001000010 01c s T s c θθθθ-????????? ?? ?=?? ?? --???????? 各连杆变换矩阵相乘,得PUMA 560的机械手变换的T 矩阵: 0123456112233445566()()()()()()T T T T T T T θθθθθθ= (3) 即为关节变量1236θθθθ,,,,的函数。 该矩阵描述了末端连杆坐标系{6}相对 基坐标系{0}的位姿。 于是,可求得机械手的T 变换矩阵: 016160 1x x x x y y y y z z z z n o a p n o a p T T T n o a p ??????==?????? (4)
机器人运动学知识介绍
机器人运动学知识介绍 收藏 21:53|发布者: dynamics|查看数: 1125|评论数: 2| 来自: 东方早报 摘要: 现在你可能正拿着一本书,边看边翻页,并时不时回头,越过肩膀察看后面是否有红眼的恶意机器人。随着书页的翻动,你也许会在无意识里考虑这个问题。作为人类,在物理世界移动是如此自然,只需要一丁点的意识即可。而 ... 丹尼尔·威尔逊 现在你可能正拿着一本书,边看边翻页,并时不时回头,越过肩膀察看后面是否有红眼的恶意机器人。随着书页的翻动,你也许会在无意识里考虑这个问题。作为人类,在物理世界移动是如此自然,只需要一丁点的意识即可。而另一方面,机器人———就像最后一个选择踢球的孩子———为了避免伤到自己和别人,每一个动作都必须经过仔细考虑。机器 人专家管这个过程叫做“操作研究”。 前进和逆转 如果你醒来发现自己处在一具新的躯体中,拥有金属手臂,每只手只有三根手指,你会怎么样呢?如果不知道手臂的长度,拿东西会很困难;如果只有三根手指,那么你必须找到一个全新的抓取和握东西的方法;由于弯曲的金属手臂,你可能再也没有约会的机会。这些就是身处各地的孤独的机器人们所面临的重大问题。 运动学研究旨在解决机器人的手臂转向何方(动力学则为了解决移动的速度和劲道)。机器人运动学可分两类:前进和逆转。前进运动学的问题是机器人运用它对自身的了解(关节角度和手臂长度)来判断自己在三维空间中到底身处何方。这算是简单的部分,逆转运动学正好相反,它解决机器人如何移动才能达到合适的姿势(改变关节位置)这一问题。机器人在握你手之前,需要知道你手的大概方位,以及从这里移向那里的最优顺序。有时候,可能没有最好的解决方案(试试用你的右手碰你的右肘)。 对逆转运动学来说,大多数方案运用传感器(通常是视觉和力)来估计机器人身体的当前位置。只要有了这个,机器人就能够计划下一步行动(握手、问好或绞断你的脖子)。机器人的反应很敏捷,日本ATR实验室的类人机器人能够更新视觉,估计世界形势,并且在一秒钟里能够做60个动作。这些类人机器人已经能够跳舞,耍弄彩球,玩篮球和曲棍球。 扫描环境和选择动作的过程叫做反馈环路。新的信息被经常性地用于更新当前的决定。如果缺乏经常性更新,机器人的操作技能会变得糟糕。传感器的损伤(或非常不可信赖的传感器)会干扰这一重要的环路。比如以视觉为基础的跟踪遇到混乱的场景会大受干扰,或者浪费资源去跟踪一些无意义的目标(比如落叶等)。震动可以扰乱力传感器,即使它们位于机器人手臂的内部。虽然机器人能够反应得更快更精确,但它们总是依赖于不断更新的信息和持续改进的计划。