理解stm32 bit-band映射公式
bit_band,直译为位带,也翻译成别名存储区。
映射公式:
bit_word_addr = bit_band_base + (byte_offset x 32) + (bit_number × 4) (式1)
其中:
bit_word_addr —— bit_band中字的地址,它映射到某个寄存器位。
bit_band_base —— bit_band的基准地址。
byte_offset ——寄存器的偏移数值
bit_number ——寄存器位所在位置(0-31)
下面的例1说明,如何将SRAM 地址为0x20000300的字节中的位2映射到别名区中:0x22006008 = 0x22000000 + (0x300*32) + (2*4).
对0x22006008地址的写操作等同于对SRAM 中地址0x20000300字节的位2 执行读- 改- 写操作。
这个公式照着套用,也没问题。
我比较钻牛角尖,总想弄明白,为什么式1中要乘以32,要乘以4。
记住这个前提:
(1)STM32对bit-band的访问,是以32位的方式来访问,即一次读写32位(Bit),4个字节(STM32是32位的CPU,一次读32位长,速度快,存储空间比51大的多)。(2)寄存器中的1个位,是使用bit-band中1个双字(32位)来表达的。
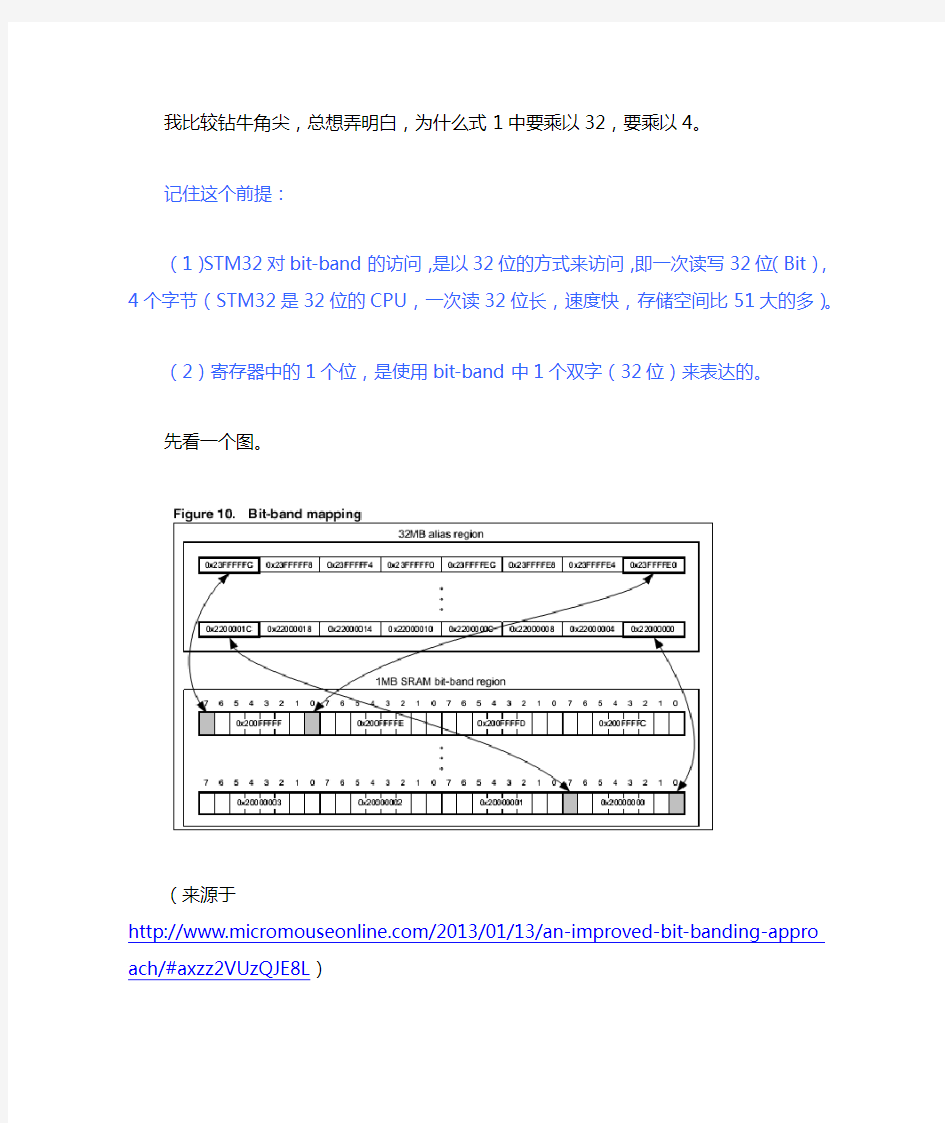
先看一个图。
(来源于
https://www.360docs.net/doc/b67754827.html,/2013/01/13/an-improved-bit-banding-approach/#axzz 2VUzQJE8L)
0x20000000的0~7对应0x22000000~0x2200001C,共32个字节,8个双字。
0x20000000的位0对应0x22000000,0x22000001,0x22000002,0x22000003,共4个字节,1个双字
例1中:
0x20000300相对于0x20000000的位移是 0x20000300 - 0x20000000 = 300,相当于300行(ROW)。
乘以32,是因为一行(1个寄存器字节)是32个字节。两者相减,就是它们之间相差的距离,不用担心加1减1的问题。
式1中,bit_number 为什么要乘以4?这里,寄存器字节中的位相当于列。(如屏幕分辨率1440*900,900是行数,1440是列数,行之间的比例是1,而这里是32)
每列之间相差4个字节:
0x22000004 - 0x22000000 = 4
因为前提(2)。
如例1中,0x22006008~0x2200600B来映射0x20000300的字节中的位2,而实际只有0x22006008的位0表示寄存器位2的状态。
再举例2如:
GPIOA是0x4001 0800
端口输出数据寄存器(GPIOx_ODR) 的偏移地址是0x0c
根据公式:别名区= ADDRESS=0x4200 0000 + (0x0001 080C*0x20) + (bitx*4) ;bitx:第x位
得到PA.0和PA.1的别名区地址
#define PA_Bit0 ((volatile unsigned long *) (0x42210180))
#define PA_Bit1 ((volatile unsigned long *) (0x42210184))
(来源https://www.360docs.net/doc/b67754827.html,/forum.php?mod=viewthread&tid=3861107)
今天在网上看到通过别名区的映射实现位操作功能,以前看STM32手册的时候看到过介绍,但一直没明白怎么用,今天用了一下,成功了!
我的STM32板子PA0和PA1接的LED灯,所以先映射这两位。
查看手册中的寄存器组起始地址:
(原文件名:地址.jpg)
GPIOA是0x4001 0800
端口输出数据寄存器(GPIOx_ODR) 的偏移地址是0x0c
根据公式:别名区= ADDRESS=0x4200 0000 + (0x0001 080C*0x20) + (bitx*4) ;bitx:第x位得到PA.0和PA.1的别名区地址
#define PA_Bit0 ((volatile unsigned long *) (0x42210180))
#define PA_Bit1 ((volatile unsigned long *) (0x42210184))
接下来就可以对PA.0和PA.1进行位操作了
*PA_Bit0 = 1; //PA.0 置1
*PA_Bit1 = 0; //PA.1 置0
还可以读出这一位的值:
while(1)
{
*PA_Bit1 =(~*PA_Bit1);
Delay(1000); //延时1秒
}
PA.1接的LED会闪烁。
由于对STM32的存储结构不了解,0x4200 0000不知道是从哪里来的。后来看到了一个PDF文档
(原文件名:存储.jpg)
原来0x4200 0000是外设别名区域的地址。
定义成宏,操作就简单了,不用看16进制的8个数字了。
什么是位段、位带别名区?
2. 它有什么好处?
答1:是这样的,记得MCS51吗?MCS51就是有位操作,以一位(BIT)为数据对象的操作,MCS51可以简单的将P1口的第2位独立操作:P1.2=0;P1.2=1 ; 就是这样把P1口的第三个脚(BIT2)置0置。
而现在STM32的位段、位带别名区就为了实现这样的功能。
对象可以是SRAM,I/O外设空间。实现对这些地方的某一位的操作。
它是这样的。在寻址空间(32位地址是4GB )另一地方,取个别名区空间,从这地址开始处,每一个字(32BIT)
就对应SRAM或I/O的一位。
这样呢,1MB SRAM就可以有32MB的对应别名区空间,就是1位膨胀到32位(1BIT 变为1个字)我们对这个别名区空间开始的某一字操作,置0或置1,就等于它映射的SRAM或I/O相应的某地址的某一位的操作。
答2:简单来说,可以把代码缩小,速度更快,效率更高,更安全。
一般操作要6条指令,而使用位带别名区只要4条指令。
一般操作是读-改-写的方式,而位带别名区是写操作。防止中断对读-改-写的方式的影响。
// STM32支持了位带操作(bit_band),有两个区中实现了位带。其中一个是SRAM 区的最低1MB 范围,第二个则是片内外设
// 区的最低1MB 范围。这两个区中的地址除了可以像普通的RAM 一样使用外,它们还都有自己的“位带别名区”,位带别名区
// 把每个比特膨胀成一个32 位的字。
//
// 每个比特膨胀成一个32 位的字,就是把1M 扩展为32M ,
//
// 于是;RAM地址0X200000000(一个字节)扩展到8个32 位的字,它们是:(STM32中的SRAM依然是8位的,所以RAM中任一地址对应一个字节内容)
// 0X220000000 ,0X220000004,0X220000008,0X22000000C,0X220000010,0X220000014,
0X220000018,0X22000001C
// 支持位带操作的两个内存区的范围是:
// 0x2000_0000‐0x200F_FFFF(SRAM 区中的最低1MB)
// 0x4000_0000‐0x400F_FFFF(片上外设区中的最低1MB)
/*
对SRAM 位带区的某个比特,记它所在字节地址为A,位序号
在别名区的地址为:
AliasAddr=0x22000000 +((A‐0x20000000)*8+n)*4 =0x22000000+ (A‐0x20000000)*32 + n*4
对于片上外设位带区的某个比特,记它所在字节的地址为A,位序号为n(0<=n<=7),则该比特
在别名区的地址为:
AliasAddr=0x42000000+((A‐0x40000000)*8+n)*4 =0x42000000+ (A‐0x40000000)*32 + n*4
上式中,“*4”表示一个字为4 个字节,“*8”表示一个字节中有8 个比特。
// 把“位带地址+位序号”转换别名地址宏
#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr
&0xFFFFF)<<5)+(bitnum<<2))
//把该地址转换成一个指针
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
// MEM_ADDR(BITBAND( (u32)&CRCValue,1)) = 0x1;
例如点亮LED
// 使用STM32库
GPIO_ResetBits(GPIOC, GPIO_Pin_4); //关LED5
GPIO_SetBits(GPIOC, GPIO_Pin_7); //开LED2
// 一般读操作
STM32_Gpioc_Regs->bsrr.bit.BR4 =1;// 1:清除对应的ODRy位为0
STM32_Gpioc_Regs->bsrr.bit.BS7 =1;// 1:设置对应的ODRy位为1
//如果使用位带别名区操作
STM32_BB_Gpioc_Regs->BSRR.BR[4] =1;// 1:清除对应的ODRy位为0 STM32_BB_Gpioc_Regs->BSRR.BS[7] =1;// 1:设置对应的ODRy位为1
代码比STM32库高效十倍!
对内存变量的位操作。
1. // SRAM 变量
2.
3. long CRCValue;
4.
5. // 把“位带地址+位序号”转换别名地址宏
6. #define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
7. //把该地址转换成一个指针
8. #define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
9.
10. // 对32位变量的BIT1 置1 :
11.
12. MEM_ADDR(BITBAND( (u32)&CRCValue,1)) = 0x1;
13.
14. //对任意一位( 第23位) 判断:
15.
16. if(MEM_ADDR(BITBAND( (u32)&CRCValue,23))==1)
17. {
18.
19. }
离散数学考试题
离散数学测试题 一.选择题(10*2) 1.设L (x ):x 是演员,J (y ):y 是老师,A (x ,y ):x 佩服y. 那么命题“所有演员都佩服某些老 师”符号化为( ) (A) ),()(y x A x xL →? (B) ))),()(()((y x A y J y x L x ∧?→? (C) )),()()((y x A y J x L y x ∧∧?? (D) )),()()((y x A y J x L y x →∧?? 2.令F(x):x 是有理数,G(x):x 是实数。将命题“所有的有理数都是实数,但有的有实数不是有理数”符号化为 ( ) A.?x(F(x)∧G(x))∧?x(G(x)→?F(x)) B.?x(F(x)→G(x))∧?x(G(x)∧?F(x)) C.?x(F(x)∧G(x))∧?x(G(x)∧?F(x)) D.?x(F(x)→G(x))∧?x(G(x)→?F(x)) 3.设R 是集合A={a,b,c,d}上的二元关系, R={
图同构问题综述
图同构问题综述 数据科学与计算机学院 黄**1******3 2016.05.26
1概述 芝加哥大学计算机科学教授LászlóBabai在2015年11月宣布了一个能在拟多项式时间内解决图同构问题的新算法,该算法还有待进一步审查以确定其正确性.如果最终被证明是正确的,那么这将是计算机理论领域的一项非常重要的成果. 图的同构问题可以分为四类:精确图同构问题、精确子图同构问题、不精确图同构问题和不精确子图同构问题.其中后三个问题已经被证明是NP完全问题,而对于精确图同构问题的复杂性问题,目前还没有明确的结果,即尚不清楚它是P问题还是NP完全问题,但至少知道它是NP问题. 本文是图同构问题的一个综述,首先给出图同构问题的定义,接着介绍了图同构问题判定算法的研究现状和应用,最后介绍一些具体的判定算法. 2图同构的概念 一个图可以存在多种不同的形式,这些不同形式的图都具有相同数目的顶点、边,而且边还具有相同的连接性.这些不同形式的图就是同构. 直观上地说,如果两个图G1和G2有相同数目的顶点和边,并且边的连接性也相同,那么就说这两个图是同构的.我们可以把一个图看做是另一个图经过扭曲得到的.下面给出图同构的严格定义. 给定两个无向简单图G和H,如果存在一个双射f:V(G)→V(H),使得对于任意的u,v∈V(G),有?u,v?∈E(G)当且仅当?f(u),f(v)?∈E(V),则称图G和H是同构的,记为G?H. 如果G1?G2,那么: (1)|V(G1)|=|V(G2)|. (2)|E(G1)|=|E(G2)|. (3)G1和G2的度序列相同. (4)如果{v1,v2,...,v k}是G1的长度为k的圈,那么{f(v1),f(v2),...,f(v k)}是G2长 度为k的圈. 上述的条件是两个图G1和G2同构的必要条件,下面给出几个充分条件: (1)G1?G2当且仅当G1?G2,其中G1和G2都是简单图. (2)G1?G2如果它们有相同的邻接矩阵. (3)G1?G2当且仅当它们相应的子图也同构.
5种图同构算法的比较
A Performance Comparison of Five Algorithms for Graph Isomorphism P. Foggia, C.Sansone, M. Vento Dipartimento di Informatica e Sistemistica Via Claudio, 21 - I 80125 - Napoli, Italy {foggiapa, carlosan, vento}@unina.it Abstract Despite the significant number of isomorphism algorithms presented in the literature, till now no efforts have been done for characterizing their performance. Consequently, it is not clear how the behavior of those algorithms varies as the type and the size of the graphs to be matched varies in case of real applications. In this paper we present a benchmarking activity for characterizing the performance of a bunch of algorithms for exact graph isomorphism. To this purpose we use a large database containing 10,000 couples of isomorphic graphs with different topologies (regular graphs, randomly connected graphs, bounded valence graph), enriched with suitably modified versions of them for simulating distortions occurring in real cases. The size of the considered graphs ranges from a few nodes to about 1000 nodes. 1. Introduction The exact graph matching problem is of interest in a variety of different pattern recognition contexts. In fact, graphs are used to support structural descriptions as well as for low level image representations. As it is well known, among the different types of graph matching algorithms, subgraph isomorphism is a NP-complete problem [10], while it is still an open question if also graph isomorphism is a NP-complete problem. So, time requirements of brute force matching algorithms (either in case of isomorphism or subgraph isomorphism) increase exponentially with the size of the input graphs, restricting the applicability of graph based techniques to problems implying graphs with a small number of nodes and edges. During the last decades significant research efforts have been devoted to improve performances of the matching algorithms, both in terms of computational time and memory requirements. Some algorithms reduce the computational complexity of the matching process by imposing topological restrictions on the graphs [1, 11, 14, 22] An alternative approach for reducing the matching complexity is that of using an adequate representation of the searching process and pruning unprofitable paths in the search space. In this way, no restrictions must be imposed on the structure of the
华东交通大学离散数学考试试卷整理版
华东交通大学 离散数学 期考试卷(一) ( A )卷 课程名称: 离散数学 课程类别:必、限、任 考试方式:闭卷(√)、开卷(范围)( ): 题号 一 二 三 四 五 六 七 八 九 十 总分 累分人签名 题分 20 30 8 7 5 8 7 7 8 100 得分 考生注意事项:1、本试卷共 8 页,总分 100 分,考试时间 120 分钟。 2、考试结束后,考生不得将试卷、答题纸和草稿纸带出考场。 一、 填空题(每小题2分,共20分) 1、集合A = {{1}, {2, 3}},则P (A )=_________________________________。 2、集合A = {a , b },则笛卡儿积A ?A =_______________________________。 3、设A ={1, 2, 3},G =
为群,其中⊕为集合的对称差运算,那么方程{1, 2, 3} ⊕ X = {1, 2}的解是_______________________________________________________________。 4、在一阶逻辑中,“有些人不喜欢吃早饭” 的符号化形式为___________________________ ____________________________________________________________________________。 5、集合A = {a , b , c },A 上等价关系R ={, , ,
同构映射的定义同构映射的定义
§6.8 线性空间的同构一、 同构映射的定义 一、同构映射的定义 二、同构的有关结论
我们知道,在数域P 上的n 维线性空间V 中取定一组基后,V 中每一个向量有唯一确定的坐标向量的坐标是P 上的n 元数组,因此属于P n . 这样一来,取定了V 的一组基对于V 中每一个向量,令在这组基下的坐标与对应,就得到V 到P n 的一个单射 反过来,对于P n 中的任一元素是V 中唯一确定的元素,并且即也是满射.因此, 是V 到P n 的一一对应.引入12(,,,),n a a a L α12,,,,n εεεL αα12(,,,)n a a a L α12:,(,,,) n n V P a a a σα→a L 12(,,,), n a a a L 1122n n a a a αεεε=+++L 12()(,,,), n a a a σα=L σσ
这个对应的重要必性表现在它与运算的关系上.任取设 ,,V αβ∈12()(,,,)n b b b σβ=L 1122,n n a a a αεεε=+++L 1122n n b b b βεεε=+++L 12()(,,),n a a a σα=L 则1122()(,,) n n a b a b a b σαβ+=+++L 12()(,,)n k ka ka ka k P σα=?∈L 归结为它们的坐标的运算. 这就是说,向量用坐标表示后,它们的运算可以1212(,,)(,,,)()()n n a a a b b b σασβ=+=+L L 12(,,)(), n k a a a k σα==L 从而
一、同构映射的定义 设都是数域P 上的线性空间,如果映射,V V ′具有以下性质: V V σ′→:则称的一个同构映射,并称线性空间V V σ′是到同构,记作V V ′与. V V ′?ii) ()()(), ,V σαβσασβαβ+=+?∈iii) ()(),,k k k P V σασαα=?∈?∈i) 为双射 σ
《离散数学》期终试题-软件学院-2005-1-中文版
《离散数学》期末考试 南京大学软件学院2005年1月 1.A, B是任意集合,证明:A?~B=φ当且仅当A?B。 2.某系120名学生中有100人选修德语、法语和俄语三门课中的至少一门。已知:有65 人选法语,45人选德语,42人选俄语,20人选法语和德语,25人选法语和俄语,15人选俄语和德语。有多少人是三门课全选的? 3.A, B, C是任意集合,证明: (1)A?(B-C) =(A?B)- (A?C) (2)A?(B-C) =(A?B)- (A?C)是否成立?证明你的结论。 4.以下是定义在正整数集上的关系,讨论每个关系所满足的性质: (1)“x比y大”(2)“xy是某个整数的平方”(3)“x+4y=10” 5.设A是含4个元素的集合,A上分别可以定义多少满足下列条件的不同的关系: (1)对称关系(2)反对称关系(3)等价关系 6.设g: A→B是双射,证明如下定义的f也是双射:f : ρ(A)→ρ(B): ?S∈ρ(A), f(S)={g(x)|x∈S} 7.假设群G与G’同构,同构映射是f : G→G’。证明: (1)f (e)=e’, 其中:e和e’分别是G和G’单位元素。 (2)f (a -1)=[f (a)]-1, 其中:a是G中任一元素。 8.给定字母表∑={a,b}, 写出定义下列语言L的正则文法和相应的正则表达式 (1)L包含所有恰好含一个b的串。(2)L包含所有不含连续的a串。 9.设k是一给定的正整数。G是一个可交换群。定义函数f : G→G, ?a∈G, f (a)=a k。证明: f 是G上的同构映射。 10.设M={
离散数学深刻复知识题(全)
离散数学复习资料 一、填空 1. 命题“对于任意给定的正实数,都存在比它大的实数”令F(x):x 为实数,y x y x L >:),(则命题的逻辑谓词公式为 。 2. 设p :王大力是100米冠军,q :王大力是500米冠军,在命题逻辑中,命题“王大力不 但是100米冠军,而且是500米冠军”的符号化形式为 。命题“存在一个人不但是100米冠军,而且是500米冠军”的符号化形式为____。 3. 选择合适的论域和谓词表达集合A=“直角坐标系中,单位元(不包括单位圆周)的点集” 则A= 。 4. 设 P (x ):x 是素数, E(x):x 是偶数,O(x):x 是奇数 N (x,y):x 可以整数y 。则谓词 (()(()(,)))x P x y O y N y x ?→?∧ 的自然语言是 对于任意一个素数都存在一个奇数使 该素数都能被整除 。 5. 设个体域是{a,b},谓词公式()()()()x P x x P x ??∨?写成不含量词的形式是 。 6. 谓词(((,)(,))(,,))x y z P x z P y z uQ x y u ???∧→?的前束范式为 。 7. 命题公式)))(((R Q Q P P A →?∧→?∨?的主合取范式为 ,其编码表示为 。 8. 设E 为全集, ,称为A 的绝对补,记作~A ,且~(~A )= ,~E = , ~Φ= 。 9. 设={256},{234},{134}A B C ==, ,,,,,,则A-B= ,A ⊕B = ,A ×C = 。 10. 设},,{c b a A =考虑下列子集}},{},,{{1c b b a S =,}},{},,{},{{2c a b a a S =,
线性空间的同构
§8 线性空间的同构 一、数域 P 上的 n 维线性空间 n P 二、数域 P 上的一般的n 维线性空间 V 例如:[]n P x 等 设n εεε,,,21 是线性空间V 的一组基,在这组基下,V 中每个向量都有确定的坐标, 而向量的坐标可以看成n P 元素,因此向量与它的坐标之间的对应实质上就是V 到n P 的 一个映射.显然这个映射是单射与满射,换句话说,坐标给出了线性空间V 与n P 的 一个双射. 这个对应的重要性表现在它与运算的关系上.设 n n a a a εεεα+++= 2211, n n b b b εεεβ+++= 2211 而向量,,βα的坐标分别是),,,(21n a a a ,),,,(21n b b b ,那么 n n n b a b a b a εεεβα)()()(222111++++++=+ ; n n ka ka ka k εεεα+++= 2211. 于是向量,βα+αk 的坐标分别是 ),,,(),,,(),,,(21212211n n n n b b b a a a b a b a b a +=+++, ),,,(),,,(2121n n a a a k ka ka ka =. 以上的式子说明在向量用坐标表示之后,它们的运算就可以归结为它们坐标的运算. 因而线性空间V 的讨论也就可以归结为n P 的讨论. 三、线性空间同构 1.定义11 数域P 上两个线性空间V 与V '称为同构的,如果由V 到V '有一个双射σ,
具有以下性质: 1))()()(βσασβασ+=+; 2) ).()(ασασk k = 其中βα,是V 中任意向量,k 是P 中任意数.这样的映射σ称为同构映射. 前面的讨论说明在n 维线性空间V 中取定一组基后,向量与它的坐标之间的对应 就是V 到n P 的一个同构映射.因而,数域P 上任一个n 维线性空间都与n P 同构. 2.同构映射具有下列性质 由定义可以看出,同构映射具有下列性质: (1). )()(,0)0(ασασσ-=-=. (2). )()()()(22112211r r r r k k k k k k ασασασααασ+++=+++ . (3).V 中向量组r ααα,,,21 线性相关?它们的象)(,),(),(21r ασασασ 线性相关. 因为维数就是空间中线性无关向量的最大个数,所以由同构映射的性质可以推知, 同构的线性空间有相同的维数. (4). 如果1V 是V 的一个线性子空间,那么,1V 在σ下的象集合 {}11|)()(V V ∈=αασσ 是)(V σ的子空间,并且1V 与)(1V σ维数相同. (5). 同构映射的逆映射以及两个同构映射的乘积还是同构映射. 同构作为线性空间之间的一种关系,具有反身性、对称性与传递性. 既然数域P 上任意一个n 维线性空间都与n P 同构,由同构的对称性与传递性即得, 数域P 上任意两个n 维线性空间都同构. 3. 定理12 数域P 上两个有限维线性空间同构的充要条件是它们有相同的维数. 由线性空间的抽象讨论中,并没有考虑线性空间的元素是什么,也没有考虑其中运算 是怎样定义的,而只涉及线性空间在所定义的运算下的代数性质.从这个观点看来, 同构的线性空间是可以不加区别的.因之,定理12说明了,维数是有限维线性空间的 唯一的本质特征.
离散数学网上作业题
东北农业大学网络教育学院 离散数学复习题 复习题一 一、证明 1、对任意两个集合B A 和,证明 ()()A B A B A =??- 2、构造下面命题推理的证明 如果今天是星期三,那么我有一次英语或数学测验;如果数学老师有事,那么没有数学测验;今天是星期三且数学老师有事,所以我有一次英语测验。 二 、计算 1、(1)画一个有一条欧拉回路和一条汉密顿回路的图。 (2)画一个有一条欧拉回路但没有汉密顿回路的图 (3)画一个没有欧拉回路但有一条汉密顿回路的图 2、设()(){ }212,,,个体域为为,整除为 利用同构特点解决问题 一、基础知识: 1、同构式:是指除了变量不同,其余地方均相同的表达式 2、同构式的应用: (1)在方程中的应用:如果方程()0f a =和()0f b =呈现同构特征,则,a b 可视为方程()0f x =的两个根 (2)在不等式中的应用:如果不等式的两侧呈现同构特征,则可将相同的结构构造为一个函数,进而和函数的单调性找到联系。可比较大小或解不等式 (3)在解析几何中的应用:如果()()1122,,,A x y B x y 满足的方程为同构式,则,A B 为方程所表示曲线上的两点。特别的,若满足的方程是直线方程,则该方程即为直线AB 的方程 (4)在数列中的应用:可将递推公式变形为“依序同构”的特征,即关于(),n a n 与()1,1n a n --的同构式,从而将同构式设为辅助数列便于求解 例1:(2015天津十二校联考)设,x y R ∈,满足()()()()5512sin 1312sin 11 x x x y y y ?-++-=??-++-=?? ,则x y +=( ) A. 0 B. 2 C. 4 D. 6 例2:若函数( )f x m 在区间[],a b 上的值域为(),122a b b a ??>≥???? ,则实数m 的取值范围是_____________ 例3:设,a b R ?,则|“a b >”是“a a b b >”的( ) A. 充分不必要条件 B. 必要不充分条件 C. 充要条件 D. 既不充要又不必要条件 例4:若1201x x <<<,则( ) A. 2121ln ln x x e e x x ->- B. 1221ln ln x x e e x x ->- C. 1221x x x e x e > D. 1221x x x e x e < 例5:已知函数()f x 是定义在实数集R 上的不恒为零的偶函数,且对任意实数x 都有 第六章 线性空间 学习单元8: 线性空间的同构 _________________________________________________________ ● 导学 学习目标: 了解同构映射的概念,掌握线性空间同构的概念;理解同构映射的性质;掌握线性空间同构的判别。 学习建议: 建议大家多看书,认真阅读定义,理论联系实际,通过具体线性空间去理解相关概念与结论,对例题要深刻理解,认真完成练习题。 重点难点: 重点:线性空间的同构映射的概念与性质。 难点:同构映射在实际问题中的应用。 _________________________________________________________ ● 学习内容 一、n 维线性空间中向量与坐标的对应关系 令V 为P 上n 维线性空间,1,,n ααL 为V 的一个基,V 中每个向量在1,,n ααL 下有唯一的坐标,令 :n V P σ→ αα→在1,,n ααL 下的坐标 即当11n n x x ααα=++L 时,1()(,,)n x x σα=L 。 命题 σ为V 到n P 的一一映射(双射),并且 ()()(),,V σαβσασβαβ+=+∈; ()(), ,k k k P V σασαα=∈∈。 注:这种对应正是几何问题转化为代数问题的理论依据。 二、线性空间同构的概念 定义 设V 与'V 均为数域P 上线性空间,若存在V 到'V 的双射σ满足。 (1)()()(),,V σαβσασβαβ+=+∈(即σ保持加法)。 (2)()(), ,k k k P V σασαα=∈∈(即σ保持数乘) 。 则称σ为V 到'V 的一个同构映射。 若V 到'V 之间存在同构映射,则称V 与'V 同构,记为'V V ?。 定理 设V 为数域P 上n 维线性空间,则n V P ?。 三、线性空间同构的性质 令,'V V 为P 上线性空间,σ为V 到'V 的同构映射。 1.(0)0,()σσαα=-=-。 2.1111()()()r r r r k k k k σαασασα++=++L L 。 3.1,,r ααL 为V 中一个向量组,则 1,,r ααL 线性相关当且仅当1(),,()r σασαL 线性相关。 4.dim dim 'V V =,特别当1V V ≤时,1 |V σ为1V 到1()V σ的同构映射,且 111dim dim (),()'V V V V σσ=≤。 5.1σ-为'V 到V 的同构映射。 6. 令,',''V V V 为P 上线性空间,σ为V 到'V 的同构映射,τ为'V 到''V 的同构映射,则τσ为V 到''V 的同构映射。 命题 线性空间之间的同构关系为一个等价关系。 定理 设V 与'V 为P 上两个有限维线性空间,则'V V ?的充要条件是 dim dim 'V V =。 ?? ???↓ 映射集合线性空间的同构 直和和并子空间与子空间的运算与坐标变换过度矩阵线性空间的基变换坐标基线性空间的维数→→→→,,:)(, ,, 同构映射、同构映射的六个性质,两个线性空间同构 二.习题举例 例1:求线性空间的维数 1)数域P 上所有反对称矩阵组成的线性空间。 2 ) 1(-n n 2)数域P 上所有上三角形矩阵组成的线性空间。2 ) 1(+n n 例2:证明:P n 的任意一个真子空间都是若干个n-1维子空间的交。 证明:设V 是P n 的任意一个真子空间,不仿设 V=L(r ααα ,,21), )(n r < 它是线性方程组?? ? ??? ?=++=+++=+++--,0,0, 0)(11)(22221211212111n n r n r n n n n n x b x b x b x b x b x b x b x b 的解空间, 记k W 为线性方程组02211=+++n kn k k x b x b x b ,k=1,2,…,n -r 的解向量空间,显然是P n 的n-1维子空间,且V 恰好是这n-r 个n-1维子空间的交。 例3设n ααα ,,21是n 维线性空间V 中的n 个向量,V 中的每个向量都可以由它们线性给出,求证:n ααα ,,21是V 的一组基。 证明:只须证明n ααα ,,21线性无关,事实上,如果rk r r ααα ,,21是 n ααα ,,21的一个极大线性无关组,则rk r r ααα ,,21是V 的一组基,所 以n k =,向量组rk r r ααα ,,21就是向量组n ααα ,,21,是线性无关。 例4:在5R 中求齐次线性方程组 ??? ??=-+-+=+-+-=+-+-0 220322402254321 5432154321x x x x x x x x x x x x x x x , 的解空间的维数与一组基。 解:????? ??------=211213224111122A ??? ? ? ??------→533605336021121????? ? ??----→00 000351 12021 121 ??????? ? ? ?? ---→0000035 1120310001;解空间的维数是3,一组基是 ) 6,0,0,5,2()0,2,0,1,0(), 0,0,2,1,0(321=-==βββ 例5:设??? ? ??-=0110A ,证明:实数域上矩阵 A 的全体实系数多项式)(A f 组成的空间? ?? ? ?? ???? ??-==0110|)(A A f V 与 复数域C 作为实数域R 上的线性空间},|{R b a bi a V ∈+='同构。 第 3 讲 §7—9 一一映射,同态及同构(2课时) (Bijection Homomorphism and Osomorphism ) 本讲教学目的和要求:通过了解双射,同态及同构的理论,为后继课程中学习群同态,群同构(群第一、二同构定理)环同态,环同构理论做准备。具体要求: 1、在第一讲的基础上,对各类映射再做深入的研究。 2、充分了解双射(一一映射)的特性以及由此引导出的逆映射。 3、两个代数系统的同态的概念,尤其是同态的满射所具有的性质。 4、掌握同构映射的实质,为以后教学内容奠定基础, 本讲的重点和难点:本讲的重点在于对同态映射定义的了解;由同态满射引导的一系列性质及同构映射本质的掌握。而对双射及自身的逆映射之间的关系学生不易把握,需要认真对待。 本讲的教法和教具:在多媒体教室使用投影仪。在教学活动中安排时间让学生展开讨论。 本讲思考题及作业:本讲思考题将随教学内容而适当地展开。作业布置在本讲结束之后。 一、一一映射 在第1讲中,已对各类映射作了系列性的介绍,这里只对重要的一一映射作重点的讨论。 定义1、设?是集合A到A的映射,且?既是单的又是满的,则称?是一个一 一映射(双射)。 例1:},4,2,0,2,4,{2},2,1,0,1,2,{: --=→--=Z Z ?, 其中Z n n n ∈?=,2)(?,可知?显然是一个双射。 注意:Z 与偶数集Z 2之间存在双射,这表明:Z 与它的一个真子集Z 2一样“大”。 思考题:从例1中得知:一个无限集与其的某个真子集一样“大”。这是否可作为无限集都有的特性?即我们是否有如下的结论:A 为无限集的充要条件是A 与其某个真子集之间存在双射。 定理1:设?是A 到A 的一个双射,那么由?可诱导出(可确定出)A 到A 的一个双射1-?(通常称1-?是?的逆映射) 证明:由于?是A 到A 的双射,那么就A 中任一个元素a ,它在A 中都有逆象a ,并且这个逆象a 是唯一的。利用?的这一特点,则可确定由A 到A 的映射1-?: a a A a A A =∈?→--)(,,:11??,如果a a =)(?,由上述说明,易知1-?是映射。 1-?是满射:A a ∈?,因?是映射a a A a =∈??)(,?使,再由1-?的定义知a a =-)(1?,这恰说明,a 是a 在1-?下的逆象。由a 的任意性,知1-?是满射。 1-?是单射:2121,,a a A a a ≠∈?若由?是满射21a a 及?的逆象分别是 22111121)(,)(,a a a a a a ==--??即及,又?是单射21a a ≠?, 这说明)()(2111a a --≠??,所以1-?是单射。 综合上述讨论知:1-?是A 到A 的一个双射。 人工智能复习思考题(适用于研究生) 1. AI研究的基本理论,研究核心,技术及当前主要研究领域各是什么?= 2. 人工智能发展史中有哪几个里程碑?它们在AI发展中分别起了什么作用? 3. 当前AI研究中有哪些学派?各有什么研究方法和观点?= 4. 就你所学的逻辑知识中,请说明AI研究中有哪些逻辑类型? 5. 试举例说明知识的命题逻辑和谓词逻辑表示的关系与特点? 6. 什么是同态和同构映射?请说明同态和同构映射的知识表示及其智能问题求解原理。= 7. 试解释谓词逻辑的若干概念:命题,逻辑,变元的阶,谓词逻辑的可判定性等。 8. 注意掌握如何使用连接词,量词及其蕴涵式、等价式,运算规则进行谓词逻辑的演算。= 9. 问题的谓词逻辑表示与求解描述。= 10. 问题的与/或树构成思想:与/或树的计算;什么是过程表示法?它有何特点? 11. 基本搜索法的各种方式及特点,搜索效率的计算; 12. 状态空间表示法及其问题求解有哪些步骤?状态空间表示法的三元序组〈S,F,G〉中各基元的含义是什么?你能用状态空间法来表示与求解例如6-13题的农夫过河问题吗?= 13. 启发式搜索有哪些主要方法?试举例说明瞎子爬山法思想特点及其局限性。 14. 什么是估价函数?试对估价函数f(n)的表达式及其含义进行说明与分析讨论。= 15. 博弈有哪些对策?何谓“二人零和非偶然性全信息”博弈?怎样使用α-β剪枝技术求解博弈问题?(如何进行α-β剪枝,确定最佳路径,求解效率及其与极小、极大化分析法的比较,例如请求解6-20题。)= 16. 什么是消解式?什么是消解原理(归结法)?消解原理证明智能问题的求解目标的操作步骤有哪几个? 17. 请用消解原理求解4-14和4-13题。= 18. 机器定理证明有哪几种典型方法?= 19. 何谓精确推理?何谓不精确推理?试说明为什么在AI推理中不精确推理难于避免。 20. ES的基本结构及各模块的功能作用及特点是什么?= 21. ES有哪些典型类型?如何评价ES的质量(评价ES的标准和方法)?= 22. 什么是产生式表示方法?为什么ES建造者们常喜欢首选产生式知识表示法?= 23. 什么是不确定性推理?(P103页)= 24. 目前不确定性推理的研究方法主要有哪些类型?(P105页)= 26.设有如下推理规则: r1: IF Q1 THEN (100,0.1) R1 r2: IF Q2THEN (15, 1) R2 r3: IF Q3THEN (1,0.05) R3 且已知P (R1) = 0.02,P(R2) = 0.4,P(R3) = 0.06,当证据Q1,Q2,Q3存在或不存在时,P(Ri/Qi)或P(Ri/﹁Qi)的值各是什么(i = 1,2,3) ? 线性空间的同构 由前面的讨论知道,给定数域F 上的n 维线性空间V 的一个基12,,,n εεε后,V 中的任意一个向量x 由12,,,n εεε唯一线性表示,即存在唯一的 []12T n n a a a a F =∈,使得12[,,,]n x a εεε=。反之,对任意一个向量 n a F ∈,存在唯一的x V ∈,使得12[,, ,]n x a εεε=,所以在线性空间V 和n F 之间存在一一的线性映射。这样,V 的一些性质在n F 中会有所体现,所以研究n F 的属性将对V 中的问题有所刻画,由此我们给出同构的概念。 定义1 设,U V 是数域F 上的线性空间,T 是从U 到V 的线性映射,如果T 是一一映射且为满射,则称T 为从U 到V 的同构映射。若线性空间,U V 之间存在同构映射,则称,U V 同构。若T 为从U 到U 的同构映射,则称T 为U 的自同构映射。 例1 数域F 上的n 维线性空间V 与n F 同构。 例2 定义01()10T x x ??=???? ,2x R ?∈,则T 为2R 的自同构映射。 定理1 设T 为从数域F 上的线性空间U 到V 的线性映射,且为满射,则T 为U 到V 的同构映射充分必要条件是若()v T x θ=有u x θ=。 证明 必要性 设T 为U 到V 的同构映射,由于T 是一一映射及()u v T θθ=,故有若()v T x θ=,则u x θ=。 充分性 只要证明T 是一一映射即可。 设12()()T x T x =,则12()v T x x θ-=,所以12u x x θ-=,故12x x =,所以T 是一一映射。 推论1设T 为从数域F 上的线性空间U 到V 的线性映射,则T 为U 到V 的同构映射充分必要条件是()R U V =且(){}u N T θ=。 证明 由定理1显然。 由定义判断线性空间同构要求两空间之间存在同构映射,较为麻烦,而对于有限维线性空间,我们有下面的定理。 定理2 设,U V 是数域F 上的有限维线性空间,则,U V 同构的充分必要条件是dim dim U V =。利用同构特点解决问题
6.8 线性空间的同构
一线性空间的同构(基本概念)
§7—9 一一映射,同态及同构
人工智能复习思考题
线性空间的同构