input子系统学习笔记
in pu t子系统学习笔记一序
i nput子系统学习系列文章,是我在实际开发过程中遇到也是必须啃下去的第一个Li nux驱动,所以有必要记载下来的。由于刚开始未接触过I nput子系统,部分资料还是借鉴网络,本系列文章是本人的学习心得以及集百家所长的产物。
注:这是本人第一次在O ur U ni x博客发表文章,所以i nput子系统学习系列文章的介绍格式参考自博主的:m m c子系统学习笔记
i nput子系统学习系列文章,主要包含下述内容:
I nputsubsyst em理论部分
i nputsubsyst em介绍
i nput子系统结构图
l i nux中输入设备驱动的分层
输入子系统设备驱动层实现原
软件设计流程
设计有关的A P I
分配一个输入设备
注册一个输入设备
驱动实现-事件支持
驱动实现-报告事件
释放与注销设备
实例分析(按键驱动)
代码实现之重要函数分析
i nput_al l ocat e_devi ce()
注册函数i nput_r egi st er_devi ce()
i nput_r eport_key()向子系统报告事件
handl er注册分析
关键数据结构
注册i nput_handl er
注册i nput_handl e
子系统
子系统初始化函数i nput_i ni t()
evdev输入事件驱动分析
evdev的初始化
in pu t子系统学习笔记二in pu t子系统介绍及结构图
i nput子系统介绍
输入设备(如按键,键盘,触摸屏,鼠标,蜂鸣器等)是典型的字符设备,其一般的工作机制是底层在按键,触摸等动作发生时产生一个中断(或驱动通过t i m er定时查询),然后cpu通过S PI,I2C或者外部存储器总线读取键值,坐标等数据,放一个缓冲区,字符设备驱动管理该缓冲区,而驱动的r ead()接口让用户可以读取键值,坐标等数据。
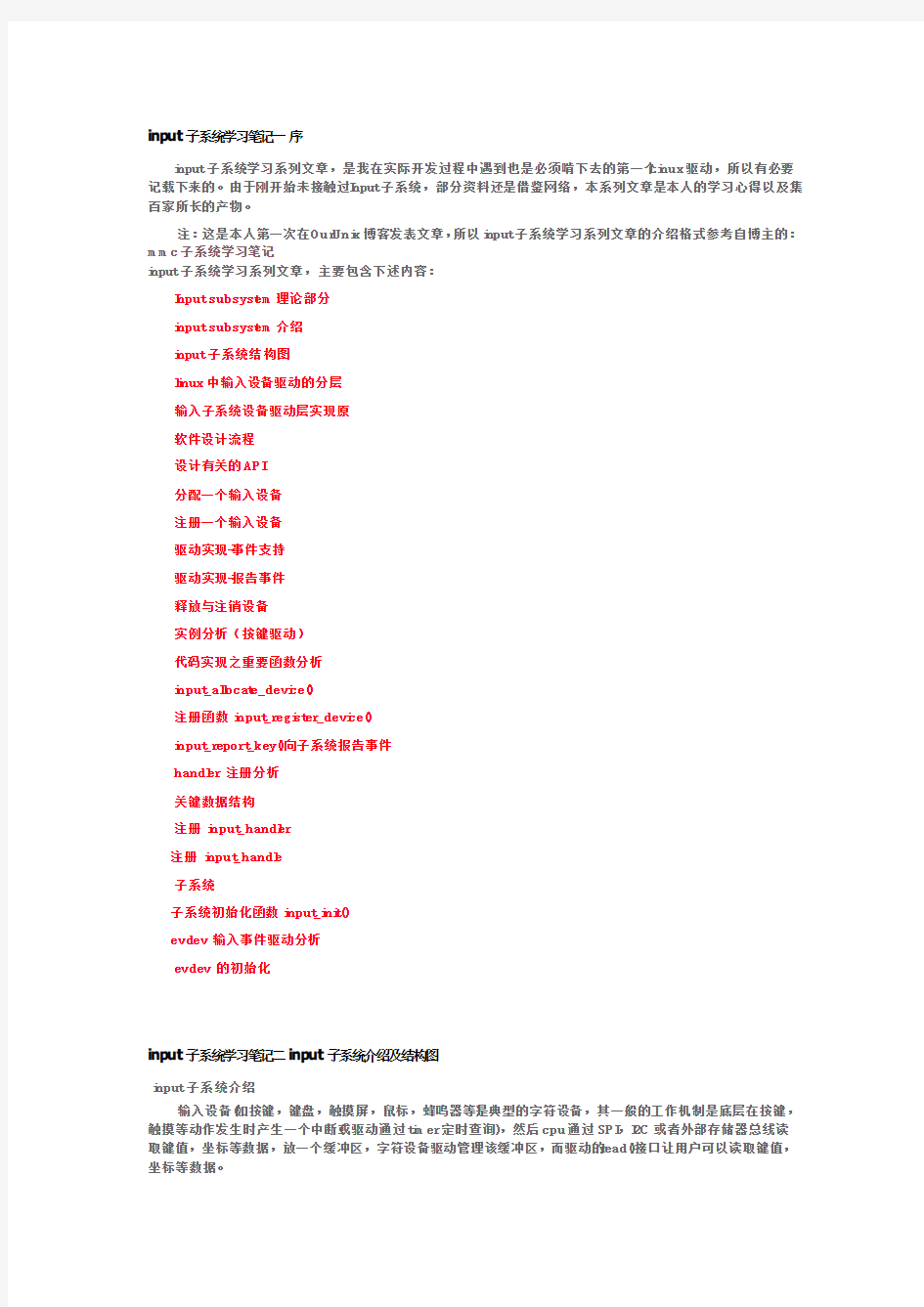
在Li nux中,输入子系统是由输入子系统设备驱动层、输入子系统核心层(I nputC or e)和输入子系统事件处理层(EventH andl er)组成。其中设备驱动层提供对硬件各寄存器的读写访问和将底层硬件对用户输入访问的响应转换为标准的输入事件,再通过核心层提交给事件处理层;而核心层对下提供了设备驱动层的编程接口,对上又提供了事件处理层的编程接口;而事件处理层就为我们用户空间的应用程序提供了统一访问设备的接口和驱动层提交来的事件处理。所以这使得我们输入设备的驱动部分不在用关心对设备文件的操作,而是要关心对各硬件寄存器的操作和提交的输入事件。
在Li nux中,输入子系统作为一个模块存在,向上,为用户层提供接口函数,向下,为驱动层程序提供统一的接口函数。其构建非常灵活,只需要调用一些简单的函数,就可以将一个输入设备的功能呈现给应用程序。这样,就能够使输入设备的事件通过输入子系统发送给用户层应用程序,用户层应用程序也可以通过输入子系统通知驱动程序完成某项功能。
i nput子系统结构图
in pu t子系统学习笔记三驱动的分层及设备驱动层实现原理
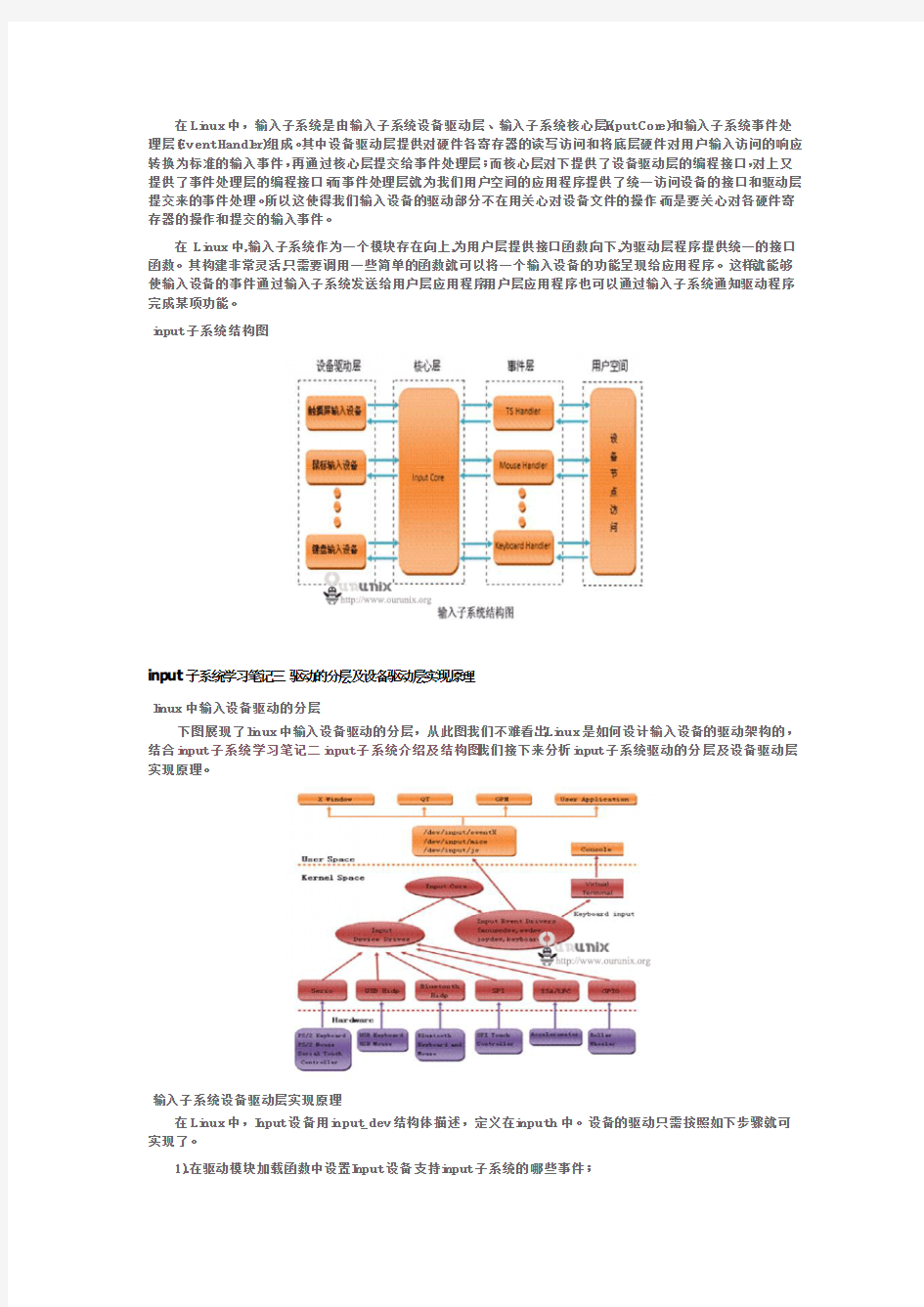
l i nux中输入设备驱动的分层
下图展现了l i nux中输入设备驱动的分层,从此图我们不难看出Li nux是如何设计输入设备的驱动架构的,结合i nput子系统学习笔记二i nput子系统介绍及结构图我们接下来分析i nput子系统驱动的分层及设备驱动层实现原理。
输入子系统设备驱动层实现原理
在Li nux中,I nput设备用i nput_dev结构体描述,定义在i nput.h中。设备的驱动只需按照如下步骤就可实现了。
1).在驱动模块加载函数中设置I nput设备支持i nput子系统的哪些事件;
2).将I nput设备注册到i nput子系统中;
3).在I nput设备发生输入操作时(如:键盘被按下/抬起、触摸屏被触摸/抬起/移动、鼠标被移动/单击/抬起时等),提交所发生的事件及对应的键值/坐标等状态。
in pu t子系统学习笔记四软件设计流程及相关A P I
接下来,我们就开始看I nput子系统的软件设计流程,我在阅读的时候同时整理设计代码中的相关A P I,并在下一篇文章详细介绍i nput子系统的代码实现。
i nput子系统的软件设计流程
软件设计流程如下所示:
分配一个输入设备——注册一个输入设备——上报输入事件——注销一个输入设备——释放一个输入设备
设计有关的A PI
分配一个输入设备
C/C++代码
1.struct input_dev*input_allocate_device*(void);
注册一个输入设备
C/C++代码
1.int input_register_device(struct input_dev*dev);
驱动实现-事件支持
C/C++代码
1.Set_bit(EV_KEY,button_dev.evbit)
2.//Set_bit告诉inout子系统它支持哪些事件
3.//Struct input_dev中有两个成员,一个是evbit;一个是keybit;分别用来表示设备所支持的事件类型和按键类型。
事件类型
Li nux中输入设备的事件类型有(这里只列出了常用的一些,更多请看l i nux/i nput.h中):
C/C++代码
1.EV_SYN0x00同步事件
2.EV_KEY0x01按键事件
3.EV_REL0x02相对坐标
4.EV_ABS0x03绝对坐标
5.EV_MSC0x04其它
6.EV_LED0x11LED
7.EV_SND0x12声音
8.EV_REP0x14Repeat
9.EV_FF0x15Force feedback事件
按键类型
当事件类型为E V_K E Y时,还需指明按键类型:
C/C++代码
1.BTN_LEFT鼠标左键
2.BTN_RIGHT鼠标右键
3.BTN_MIDDLE鼠标中键
4.BTN_0数字0键
5.BTN_1数字1键
上述set_bi t函数实则完成了把E V_K E Y赋值到but t on_dev.evbi t
驱动实现-报告事件
C/C++代码
1.Void input_event(struct input_dev*dev,unsigned int type,unsigned int code,int value);//报告指定type,
code的输入事件
2.Void input_report_key(struct input_dev*dev,unsigned int code,int value);/*报告键值,code:事件的代码,
如果事件是ev_key,该代码则为设备的键盘代码。例如鼠标按键代码为0x110~0x116,其中0x110(BTN_LEFT),0x111(BTN_ RIGHT),0x112(BTN_MIDDLE)。其它带按摩含义参考include/linux/input.h文件*/
3.value:事件的值,如果事件的类型是EV_KEY,当按键按下时值为1,松开时为0。
4.Void input_report_rel(struct input_dev*dev,unsigned int code,int value);//报告相对坐标
5.Void input_report_abs(struct input_dev*dev,unsigned int code,int value);//报告绝对坐标
6.Void input_sync(struct input_dev*dev);/*报告同步事件,input_sync()用于高速input core此次报告已经结束,
能够根据上报的信息往后面处理了*/
在触摸屏驱动设计中,一次坐标及按下状态的整个报告过程如下:
C/C++代码
1.Input_report_abs(input_dev,ABS_X,x);//X坐标
2.Input_report_abs(input_dev,ABS_Y,y);//Y坐标
3.Input_report_abs(input_dev,ABS_PRESSURE,pres);//压力
4.input_sync(struct input_dev*dev);//同步
释放与注销设备
C/C++代码
1.Void input_free_device(struct input_dev*dev);
2.Void input_unregister_device(struct input_dev*);
in pu t子系统学习笔记五按键驱动实例分析上
下面是按键驱动的简单例子,这个输入设备只有一个按键,按键被连接到一条中断线上,当按键被按下时,将产生一个中断,内核将检测到这个中断,并对其进行处理。代码含注释如下:
C++代码
2.#include
3.#include
4.static struct input_dev*button_dev;/*输入设备结构体*/
5.static irqreturn_t button_interrupt(int,irq,void*dummy)/*中断处理函数*/
6.{
7.input_report_key(button_dev,BTN_0,inb(BUTTON_PORT)&1);
8./*向输入子系统报告产生按键事件*/
9.input_sync(button_dev);
10./*通知接收者,一个报告发送完毕*/
11.return IRQ_HANDLED;
12.}
13.static int__init button_init(void)/*加载函数*/
14.{
15.int error;
16.if(request_irq(BUTTON_IRQ,button_interrupt,0,"button",NULL))
17./*申请中断处理函数*/
18.{
19./*申请失败,则打印出错信息*/
20.printk(KERN_ERR"button.c:Can't allocate irq%d\n",button_irq);
21.return-EBUSY;
22.}
23.button_dev=input_allocate_device();/*分配一个设备结构体*/
24.if(!button_dev)/*判断分配是否成功*/
25.{
26.printk(KERN_ERR"button.c:Not enough memory\n");
27.error=-ENOMEM;
28.goto err_free_irq;
29.}
30.button_dev->evbit[0]=BIT_MASK(EV_KEY);/*设置按键信息*/
31.button_dev->keybit[BIT_WORD(BTN_0)]=BIT_MASK(BTN_0);
32.error=input_register_device(button_dev);/*注册一个输入设备*/
33.if(error)
操作系统
计算机科学与技术系 实验报告 专业名称计算机科学与技术 课程名称计算机操作系统 项目名称模拟实现单道路I/O系统设备分配程序 班级 13计科2班 学号 1304012046 姓名李孟霞 同组人员无 实验日期 2015.11.30
模拟实现单道路I/O系统设备分配程序 一、实验目的 熟练掌握单通路I/O系统中的设备分配方法。 二、实验内容 本实验要求实现模拟单通路I/O系统中的设备分配程序,有如下要求: 1、设计系统设备表SDT、设备控制表DCT、控制器表COCT、通道表CHCT 和逻辑设备表LUT。 2、提供给用户各表目的初态。 3、回答信息: 能够分配时,给出设备号、控制器号、通道号, 否则,给出无法分配的回答,插入相应的等待队列。 三、实验环境 Windows系统,C语言 四、实验步骤 1、任务分析 为单通路I/O系统设计系统设备表SDT、设备控制表DCT、控制器表COCT、通道表CHCT和逻辑设备表LUT五张表。用户可以查看各表目的内容,另外,程序为用户进程分配设备,并且输出分配结果,如果能够分配,则给出设备号、控制器号、通道号,否则,给出无法分配的回答,插入相应的等待队列。 2、概要设计 为实现本次实验任务要求,首先,定义SDT、DCT、COCT、CHCT、LUT 五张表,调用input()函数初始化各表内容;其次,调用print()函数,实现对上述四张表的输出显示;最后,调用add_process()函数,为用户进程申请设备,如果分配成功,给出设备号、控制器号、通道号,否则,给出无法分配的原因,并将该进程插入相应的等待队列中。 本程序包含如下3个模块: (1)主模块,由函数main()组成。
uml期末深刻复习
第一章 1、UML(Unified Modeling Langeage)是一种可视化的建模语言,提供了一种标准的、易于理解的方式描述系统的实现过程,从而实现了用户与设计者之间的有效交流。 2、定义系统的物理元素,用于描述事物的静态特征,包括类、接口、协作、用例、主动类、组件和节点。 3、行为建模元素包括哪些? 反映事物之间的交互过程和状态变化,包括交互图和状态图。 4、组织建模元素包括哪些? 子系统、模型、包、框架等。 5、关系元素包括哪些? 关联、泛化、组成、实现、聚集、依赖、约束 6、对于UML的描述,错误的是(A、C)。 A:UML是一种面向对象的设计工具。 B:UML不是一种程序设计语言,而是一种建模语言。 C:UML不是一种建模语言规格说明,而是一种表示的标准。 D:UML不是过程,也不是方法,但允许任何过程和方法使用它。 7、从系统外部用户角度看,用于描述系统功能集合的UML图是用例视图。 8、对如下的用例图的功能进行简单描述。 Buy Goods 8、在UML中,描述父类与子类之间关系的是泛化关系。 9、“交通工具”类与“汽车”类之间的关系属于(D)。 A:关联关系 B:聚集关系
C:依赖关系 D:泛化关系 第二章 1、从软件工程的角度,软件开发可分为:需求分析、系统分析、设计、实现、测试5个阶段。 2、用UML进行建模时会涉及9种图,Rose 2003只支持其中的8种,还有一种图只能用别的图来代替。这个不能在Rose中直接表示的图是(C)。 A:顺序图 B:用例图 C:对象图 D:构件图 3、应用题:Rose分别用哪些图描述系统的静态和动态方面? 静态:用例图、类图、构件图、部署图; 动态:状态图、协作图、顺序图、活动图。 4、默认情况下,Rose模型文件的扩展名为(A)。 A:.mdl B:.ptl C:.cat D:.sub 5、关于浏览窗口的描述,正确的是(A、B、C、D)。 A:可视化地显示模型中所有元素的层次结构 B:具有托放功能,通过模型元素的托放操作可以方便地改变一个模型的特征 C:在浏览器中的模型元素发生变化时,可以自动更新模型中的相关元素 D:只有在浏览窗口中才能把模型元素从模型中永久删除 6、Rose是什么的缩写?
FANUC系统部分操作面板简介
;k;lm/n 部分面板按键功能 说明(FANUC) 一、FANUC0系统MDI面板: FANUC0系统MDI面板各键功能说明表 键名称功能说明 RESET复位键按下此键,复位CNC系统,包括取消报警、主轴故障复位、中途 退出自动操作循环与输入、输出过程等。 OUTPT START 输出启动键按下此键,CNC开始输出内存中得参数或程序到外部设备。 地址与数字键按下这些键,输入字母、数字与其它字符。 INPUT 输入键除程序编辑方式以外得情况,当面板上按下一个字母或数字键 以后,必须按下此键才能输入到CNC内。另外,与外部设备通 信时,按下此键,才能启动输入设备,开始输入数据到CNC内. CURSOR 光标移动键用于在CRT页面上,移动当前光标。 PAGE 页面变换键用于CRT屏幕选择不同得页面。 POS 页 面 切 换 键位置显示键在CRT上显示机床当前得坐标位置。 PRGRM 程序键在编辑方式,编辑与显示在内存中得程序. 在MDI方式,输入与显示MDI数据。 MENU OF SET 参数设置键刀具偏置数值与宏程序变量得显示得设定. DGNOS PRGRM 自诊断得参数键设定与显示参数表及自诊表得内容*
OPRALAR M 报警号显示键按此键显示报警号* AUXGRA PH 辅助图形图形显示功能,用于显示加工轨迹. ALTER 编 辑 键 替代键用输入域内得数据替代光标所在得数据。 DELET删除键删除光标所在得数据. INSRT插入键将输入域之中得数据插入到当前光标之后得位置上。CAN 取消键取消输入域内得数据。 EOB回车换行键结束一行程序得输入并且换行。 *表示尚未开发得功能键 二、FANUC0系统车床标准面板 FANUC0系统车床标准面板功能说明表 按钮名称功能说明MODE(模式选择旋 钮) EDIT编辑模式用于直接通过操作面板输入数控 程序与编辑程序。 AUTO 自动模式进入自动加工模式。 REF 回零模式机床回零;机床必须首先执行回 零操作,然后才可以运行。 MDIMDI模式单程序段执行模式. STEP/HAND LE 单步/手轮方式手动方式,STEP就是点动;HA NDLE就是手轮移动。 JOG 手动方式手动方式,连续移动。 DRY RUN 空运行模式按照机床默认得参数执行程序 DNC DNC模式从计算机读取一个数控程序。 运行控制按钮START循环启动程序运行开始;模式选择旋钮在 “AUTO”或“MDI”位置时按 下有效,其余模式下使用无效.
Unity3D技术之Input按键系统详解
Unity3D技术之Input按键系统详解 默认输入轴: Horizontal 和 Vertical被映射到w, a, s, d键和方向键 Fire1, Fire2, Fire3被分别映射到Ctrl,Option(Alt)和Command键 Mouse X 和 Mouse Y被映射到鼠标移动增量 Window Shake X 和 Window Shake Y 被映射到窗口的移动 添加新的输入轴 添加新的虚拟轴,选择菜单Edit->Project Settings->Input : 名称(Name):名称用于从脚本使用这个轴 描述名称(Descriptive Name):正值名称显示于配置对话框的输入标签,用于独立版。 描述负名称(Descriptive Negative Name):负值名称显示于配置对话框的输入标签,用于独立版。文章出处【狗刨学习网】 负按钮(Negative Button):该按钮用于在负方向移动轴(如:左) 正按钮(Positive Button):该按钮用于在正方向移动轴(如:右) 备选负按钮(Alt Negative Button):备选按钮用于在负方向移动轴(如:a) 备选正按钮(Alt Positive Button):备选按钮用于在正方向移动轴(如:d) 重力(Gravity):当没有按钮被按下,在单位每秒速度,轴下降到0。 死亡(Dead):模拟的死区大小。设定范围内所有模拟设备的值为0。 灵敏度(Sensitivity):在单位每秒速度,轴将移向目标值。这近用于数码设备。 捕捉(Snap):如果启用,当按下相反方向的按钮,该轴值将重设为0。 反向(Invert):如果启用,负按钮将提供一个正值,反之亦然。
ic笔试常见试题
1.setup和holdup时间区别. Answer: 建立时间:触发器在时钟沿来到前,其数据输入端的数据必须保持不变的时间 保持时间:触发器在时钟沿来到后,其数据输入端的数据必须保持不变的时间 2.多时域设计中,如何处理信号跨时域 Answer: 情况比较多,如果简单回答的话就是:跨时域的信号要经过同步器同步,防止亚稳态传播。例如:时钟域1中的一个信号,要送到时钟域2,那么在这个信号送到时钟域2之前,要先经过时钟域2的同步器同步后,才能进入时钟域2。这个同步器就是两级d触发器,其时钟为时钟域2的时钟。这样做是怕时钟域1中的这个信号,可能不满足时钟域2中触发器的建立保持时间,而产生亚稳态,因为它们之间没有必然关系,是异步的。这样做只能防止亚稳态传播,但不能保证采进来的数据的正确性。所以通常只同步很少位数的信号。比如控制信号,或地址。当同步的是地址时,一般该地址应采用格雷码,因为格雷码每次只变一位,相当于每次只有一个同步器在起作用,这样可以降低出错概率,象异步FIFO的设计中,比较读写地址的大小时,就是用这种方法。 如果两个时钟域之间传送大量的数据,可以用异步FIFO来解决问题。 https://www.360docs.net/doc/b210682107.html,tch与register的区别,为什么现在多用register.行为级描述中latch如何产生的 区别不多说。为什么避免使用latch,因为设计中用latch会使设计后期的静态时序分析变的困难(必须用的地方当然另当别论)。 行为级描述中latch产生的原因:多由于构造组合逻辑电路时,使用if或case语句,没有把所有的条件给足,导致没有提到的条件,其输出未知。或者是每个条件分支中,没有给出所有输出的值,这就会产生latch。所以构造组合逻辑电路时,其always语句中的敏感信号必须包括所有的输入端,每个条件分支必须把所有的输出端的值都给出来。 4.BLOCKING NONBLOCKING 赋值的区别 Answer: 这个问题可参考的资料很多,讲的都很透彻,可以找一下。基本用法就是常说的“组合逻辑用BL OCKING,时序逻辑用NONBLOCKIN G”。 5.MOORE 与MEELEY状态机的特征 Answer: 6.IC设计中同步复位与异步复位的区别 Answer: 如果光说概念的话:同步复位在时钟沿采复位信号,完成复位动作。 异步复位不管时钟,只要复位信号满足条件,就完成复位动作。 象芯片的上电复位就是异步复位,因为这时时钟振荡器不一定起振了,可能还没有时钟脉冲。异步复位很容易受到复位端信号毛刺的影响,比如复位端信号由组合逻辑组成,那组合逻辑输出产生的冒险,就会使触发器错误的复位。 7.实现N位Johnson Counter,N= 8.用FSM实现101101的序列检测模块 9. 集成电路设计前端流程及工具。 10. FPGA和ASIC的概念,他们的区别 11. LATCH和DFF的概念和区别 Answer: LATC是H锁存器,DFF是触发器,其电路形式完全不同。 12. 用DFF实现二分频。
Android_Input分析
Input Subsystem分析 Android2.3.7的Input子系统由驱动、Native层InputManager、InputManager JNI、Java层InputManager组成。 Input子系统的驱动被封装为字符设备,目录位于/dev/input,上层架构通过扫描该目录,得到输入设备,open()设备,read()来自底层驱动的输入事件,再由上层处理转发。 Native层InputManager有: EventHub.cpp 使用poll机制,从字符设备获取事件。 InputReader.cpp 负责从EventHub获取事件并交给InputDispatcher进行分发。它有三个附属类协助其实现该层的功能,InputDevice、InputMapper(其子类有:SwitchInputMapper、KeyboardInputMapper、TouchInputMapper、MouseInputMapper、SingleTouchInputMapper、MultiTouchInputMapper等各种输入类型的映射)将事件分类交给InputDispatcher。还有个InputReaderThread负责创建InputReader线程,由InputManager类管理,该线程会受到Poll机制的阻塞。 InputDispatcher.cpp负责将事件分发给Connection(即foreground target,猜测是当前活动UI的代理)。他内部采用queue存储事件,并使用Looper类(使用epoll实现)实现对事件接收者的管理,一旦有事件来到,首先检查queue是否为空并插入事件,不空时立即唤醒Looper,进入事件处理循环。这里同样采用线程循环,名字是InputDispatcherThread,也是由InputManager类初始化,该线程同样会受到Poll机制的阻塞。InputDispatcher类比较复杂,其内部流程还不是很清楚,还有一些附属类尚未研究。 InputManager.cpp负责管理InputReaderThread和InputDispatcherThread线程,如它们的初始化、start和stop。 以上几个类都是从其相应的Interface抽象类继承下来的,表明它们是被作为独立的组件设计的,我们可以替换它们。但是JNI层依赖具体的InputManager,2.3.7版本的InputManager实现比较简单,依附于WindowManager服务,4.0代码将InputManager也提升为一个service,可能输入响应要提高一个级别。 JNI层InputManager有: com_android_server_InputManager.cpp负责初始化InputManager,向上面Java层提供Native调用。它继承自InputReaderPolicyInterface和InputDispatcherPolicyInterface,并将自己作为参数传递给InputReader和InputDispatcher,大概是用来实现一些策略。 它提供的功能很多,如registerInputChannel()函数提供给应用程序注册Input系统以实现事件输入,该机制被包装为InputChannel类,在Native层又被封装进Connection类,被Looper添加为事件接受者。 Java层InputManager有: InputManager.java几乎是对JNI层的封装,并为JNI提供了回调。它的初始化是在
Linux内核Input子系统初始化驱动架构
Input子系统初始化驱动架构 目标:分析input子系统初始化驱动架构 本文要点: 1.input子系统重要数据结构及关系图 2.input子系统初始化驱动架构 input子系统结构图: Input子系统构建过程结构关系图 注1:开发人员在初始化设备时,需初始化相应的输入设备类型evbit[],按键值keybit[],相对位移relbit[]等。 如:evbit[0] = BIT(EV_KEY),表示此设备支持按键;keybit[BIT_WORD(BTN_0)] = BIT_MASK(BTN_0),表示支持的上报值BTN_0; relbit[0] = BIT(REL_X) | BIT(REL_Y),用于表示相对坐标值,如鼠标的位移。
主要数据结构间的关系:
struct input_id { __u16 bustype; //总线类型,如#define BUS_HOST 0x19 __u16 vendor; //制造商 __u16 product; //产品id __u16 version; //版本 }; struct timer_list { …… void (*function)(unsigned long); unsigned long data; }; #define EV_MAX 0x1f #define EV_CNT (EV_MAX+1) #define KEY_MAX 0x2ff #define KEY_CNT (KEY_MAX+1) #define ABS_MAX 0x3f #define REP_MAX 0x01 #define BITS_PER_BYTE 8 #define DIV_ROUND_UP(x,y) (((x) + ((y) - 1)) / (y)) #define BITS_TO_LONGS(nr) DIV_ROUND_UP(nr, BITS_PER_BYTE * sizeof(long)) struct input_dev { //input子系统中唯一一个需要驱动开发人员填充的数据结构…… struct input_id id;//和具体的handler匹配时,会用到 unsigned long evbit[BITS_TO_LONGS(EV_CNT)]; //需要开发人员填充 unsigned long keybit[BITS_TO_LONGS(KEY_CNT)]; //需要开发人员填充 //timer.data = (long) dev //timer.function = input_repeat_key; struct timer_list timer;//用于处理按键按下的时候重复上报键值 int abs[ABS_MAX + 1]; int absmin[ABS_MAX + 1]; //#define REP_DELAY 0x00 ;rep[REP_DELAY] = 250 int rep[REP_MAX + 1];// #define REP_PERIOD 0x01;rep[REP_PERIOD] = 33; struct list_head h_list;//list_add_tail_rcu(&handle->d_node, & dev->h_list); struct list_head node;//把自己链入到input_dev_list
实验六 Simulink子系统封装
实验六Simulink子系统封装 The electronic circuit in the following figure consists of a voltage source, a resistor, and an inductor in the form of a tightly wound coil. An iron ball beneath the inductor experiences a gravitational force as well as an induced magnetic force (from the inductor) that opposes the gravitational force. A differential equation for the force balance on the ball is given by where M is the mass of the ball, h is the height (position) of the ball, g is the acceleration due to gravity, i is the current, and βis a constant related to the magnetic force experienced by the ball. This equation describes the height, h, of the ball due to the unbalanced forces acting upon it. The current in the circuit also varies with time and is given by the following differential equation where L is the inductance of the coil, V is the voltage in the circuit, and R is the resistance of the circuit. The system of equations has three states The system also has one input (V), and one output (h). It is a nonlinear system due to the term in the equation involving the square of i and the inverse of h. Values of the parameters are given as: M=0.1 kg, g=9.81 m/s2, R=2 Ohm, L=0.02 H, β=0.001 1、在Simulink建立以上描述的系统的框图模型,并将其封装为子系统(模块),如
FANUC系统部分操作面板简介
;k;lm/n 部分面板按键功能说 明(FANUC) 一、FANUC0系统MDI面板 : FANUC0系统MDI面板各键功能说明表 键名称功能说明 RESET 复位键按下此键,复位CNC系统,包括取消报警、主轴故障复位、中途 退出自动操作循环与输入、输出过程等。 OUTPT START 输出启动键按下此键,CNC开始输出内存中的参数或程序到外部设备。 地址与数字键按下这些键,输入字母、数字与其它字符。 INPUT 输入键除程序编辑方式以外的情况,当面板上按下一个字母或数字键以 后,必须按下此键才能输入到CNC内。另外,与外部设备通信时, 按下此键,才能启动输入设备,开始输入数据到CNC内。CURSOR 光标移动键用于在CRT页面上,移动当前光标。 PAGE 页面变换键用于CRT屏幕选择不同的页面。 POS 页 面 切 换 键位置显示键在CRT上显示机床当前的坐标位置。 PRGRM 程序键在编辑方式,编辑与显示在内存中的程序。 在MDI方式,输入与显示MDI数据。MENU OF SET 参数设置键刀具偏置数值与宏程序变量的显示的设定。 DGNOS PRGRM 自诊断的参数键设定与显示参数表及自诊表的内容*
OPRALARM 报警号显示键按此键显示报警号* AUXGRAPH 辅助图形图形显示功能,用于显示加工轨迹。 ALTER 编 辑 键 替代键用输入域内的数据替代光标所在的数据。 DELET 删除键删除光标所在的数据。 INSRT 插入键将输入域之中的数据插入到当前光标之后的位置上。CAN 取消键取消输入域内的数据。 EOB 回车换行键结束一行程序的输入并且换行。 *表示尚未开发的功能键 二、FANUC0系统车床标准面板 FANUC0系统车床标准面板功能说明表 按钮名称功能说明MODE(模式选择旋 钮) EDIT 编辑模式用于直接通过操作面板输入数控 程序与编辑程序。 AUTO 自动模式进入自动加工模式。 REF 回零模式机床回零;机床必须首先执行回 零操作,然后才可以运行。 MDI MDI模式单程序段执行模式。 STEP/HANDLE 单步/手轮方式手动方式,STEP就是点 动;HANDLE就是手轮移动。 JOG 手动方式手动方式,连续移动。 DRY RUN 空运行模式按照机床默认的参数执行程序 DNC DNC模式从计算机读取一个数控程序。运行控制按钮START 循环启动程序运行开始;模式选择旋钮在 “AUTO”或“MDI”位置时按 下有效,其余模式下使用无效。 HODE 进给保持程序运行暂停,在程序运行过程 中,按下此按钮运行暂停。按 “START”恢复运行。
linux 设备输入子系统---源代码示例。自动捕获键盘鼠标等外设消息
Linux input 子系统详解与代码示例 李邦柱于杭州2014/01/09 Email:helpylee@https://www.360docs.net/doc/b210682107.html, 由于linux的驱动模型增加了input层,导致几乎所有的底层驱动都把数据封装在event里上报给input子系统。由此看来,这种改变让kernel 更具有模块化,各个模块的耦合度更低了。下面我们一起来研究input 层^_^ 1.从用户层的角度看input(event事件) 了解linux的人一定会对/dev,/ sys, /proc这几个目录有所印象,这是从内核导出到用户层的接口(从这里几乎可以观览内核)。kernel为我们导出了input在用户态的接口,就是/dev/input/下的接口,所以我们只关注这个目录下的event*(event0/event1/……)字符设备。 那么这些event*是干什么用的?简单来说就是我们对计算机的输入(包括敲击键盘,移动鼠标等等操作)经过内核(底层驱动,input)处理最后就上报到这些event*里面了。 而这里event0,event1,..就是用来区分各个外设的,可以通过命令来查看外设具体和哪个event相关联:这个命令是:cat /proc/bus/input/devices 所以我们用此命令在linux系统查看外设信息。 2.在linux/input.h中有这些数据的结构: structinput_event { structtimeval time; //事件发生的时间 __u16 type; //事件类类型:按键和移动鼠标就是不同类型 __u16 code; __s32 value; //事件值:按键a和按键b就对应不同值 }; code: 事件的代码.如果事件的类型代码是EV_KEY,该代码code为设备键盘代码.代码植0~127为键盘上的按键代码,0x110~0x116 为鼠标上按键代码,其中0x110(BTN_ LEFT)为鼠标左键,0x111(BTN_RIGHT)为鼠标右键,0x112(BTN_ MIDDLE)为鼠标中键.其它代码含义请参
FANUC系统部分操作面板简介
;k;lm/n 部分面板按键功能说 明(FANUC) 一、FANUC0系统MDI面板: FANUC0系统MDI面板各键功能说明表 键名称功能说明 RESET 复位键按下此键,复位CNC系统,包括取消报警、主轴故障复位、中 途退出自动操作循环和输入、输出过程等。 OUTPT START 输出启动键按下此键,CNC开始输出存中的参数或程序到外部设备。 地址和数字键按下这些键,输入字母、数字和其它字符。 INPUT 输入键除程序编辑方式以外的情况,当面板上按下一个字母或数字键 以后,必须按下此键才能输入到CNC。另外,与外部设备通信时, 按下此键,才能启动输入设备,开始输入数据到CNC。CURSOR 光标移动键用于在CRT页面上,移动当前光标。 PAGE 页面变换键用于CRT屏幕选择不同的页面。 POS 页 面 切 位置显示键在CRT上显示机床当前的坐标位置。 PRGRM 程序键在编辑方式,编辑和显示在存中的程序。 在MDI方式,输入和显示MDI数据。
MENU OF SET 换 键 参数设置键刀具偏置数值和宏程序变量的显示的设定。 DGNOS PRGRM 自诊断的参数键设定和显示参数表及自诊表的容 * OPRALARM 报警号显示键按此键显示报警号 * AUXGRAPH 辅助图形图形显示功能,用于显示加工轨迹。 ALTER 编 辑 键 替代键用输入域的数据替代光标所在的数据。 DELET 删除键删除光标所在的数据。 INSRT 插入键将输入域之中的数据插入到当前光标之后的位置上。CAN 取消键取消输入域的数据。 EOB 回车换行键结束一行程序的输入并且换行。 *表示尚未开发的功能键 二、FANUC0系统车床标准面板 FANUC0系统车床标准面板功能说明表 按钮名称功能说明MODE(模式选择旋 钮) EDIT 编辑模式用于直接通过操作面板输入数控 程序和编辑程序。 AUTO 自动模式进入自动加工模式。 REF 回零模式机床回零;机床必须首先执行回 零操作,然后才可以运行。 MDI MDI模式单程序段执行模式。 STEP/HANDLE 单步/手轮方式手动方式,STEP是点动;HANDLE 是手轮移动。 JOG 手动方式手动方式,连续移动。 DRY RUN 空运行模式按照机床默认的参数执行程序 DNC DNC模式从计算机读取一个数控程序。
输入子系统
1 输入子系统架构Overview 输入子系统(Input Subsyst em)的架构如下图所示 输入子系统由输入子系统核心层( Input Core ),驱动层和事件处理层(Event Handler)三部份组成。一个输入事件,如鼠标移动,键盘按键按下,joystick的移动等等通过 Driver -> Input Core -> Eventhandler -> userspac e 的顺序到达用户空间传给应用程序。 其中Input Core 即 Input Layer 由 driver/input/input.c及相关头文件实现。对下提供了设备驱动的接口,对上提供了Event Handler层的编程接口。 1.1 主要数据结构 表 1Input Subsystem main data struct ure
1.2 输入子系统架构示例图 图2 输入子系统架构示例图 2 输入链路的创建过程 由于input子系统通过分层将一个输入设备的输入过程分隔为独立的两部份:驱动到Input Core,Input Core到Event Handler。所以整个链路的这两部分的接口的创建是独立的。 2.1 硬件设备的注册 驱动层负责和底层的硬件设备打交道,将底层硬件对用户输入的响应转换为标准的输入事件以后再向上发送给Input Core。 驱动层通过调用Input_register_device函数和Input_unregist er_device函数来向输入子系统中注册和注销输入设备。 这两个函数调用的参数是一个Input_dev结构,这个结构在driver/input/input.h中定义。驱动层在调用Input_regist er_device之前需要填充该结构中的部分字段 #include
ABB机器人系统输入输出功能描述
System Input Action内的功能: 1、Motors On:伺服使能On,和控制柜上电机开启是一样的功能; 2、Motors Off:伺服使能Off,机器人控制器会在状态变化前停止; 3、Star t:启动,机器人程序启动,和示教器上启动按钮功能一致; 4、Start at main:在主程序启动,机器人从主程序从头开始并启动; 5、Stop:停止,机器人程序停止,和示教器上停止按钮功能一致; 6、Quick Stop:快速停止,机器人程序、本体快速停止,和Stop不同的是,快速停止会让机器人本体快速停下来,而停止会有些许的减速过程,两者停止的反应速度不一样; 7、Soft Sto p:软停止,机器人程序、本体软停止,机器人本体减速度比较大地停止; 8、Stop at end of cycle:程序在执行完整个循环时停止; 9、Interrupt:中断,触发机器人中断程序; 10、Load and start:从大容量存储装置中载入一段RAPID程序然后启动; 11、Reset Emergency stop:复位紧急停止,仅在硬件急停没在按下的情况下有效; 12、Reset Execution Error Signal:复位并输出出错信号; 13、Motors On and Start:电机使能并启动程序; 14、Stop at end of Instruction:程序会在执行完当前指令后停止; 15、System Reset:重启系统; 16、Load:从大容量存储装置中载入一段RAPID程序; 17、Backup:备份,把当前系统内数据、参数备份; 18、SimMode:模拟模式; 19、Disable backup:避免启动一次备份; 20、Limit Speed:极限速度,降低机器人运动速度; 21、PP to Main:PP移至Main,与示教器上调试的选项一致; 22、Collision Aviodance:激活碰撞避免,仅适用于IRB14000; 23、Write Access:获得写权限; 24、Enable Energy Saving:启动节能模式; System Output Status内的功能: 1、Motor On:当电机使能为On时输出; 2、Motor Off:当电机使能为Off时输出; 3、Cycle On:执行机器人程序时输出; 4、Emergency Stop:当紧急停止被触发时输出; 5、Auto On:自动运行时输出; 6、Runchain Ok:安全链链OK; 7、TCP Speed:TCP运行速度的模拟信号; 8、Execution Error:报警出错时输出; 9、Motor On State:电机在启动状态; 10、Motor Off State:电机在关闭状态; 11、Power Fair Error:程序无法在上电失败后从当前位置继续执行时输出; 12、Motion Supervision Triggered:触发运动监控; 13、Motion Supervision On:运动监控启动; 14、Path return Region Error:系统在尝试启动相关机器人程序(不过由于相关机器人离编程路径太远,因此启动将会失败)时输出; 15、TCP Speed Reference:TCP编程速度的模拟信号;
密码锁verilog课程设计
课程设计报告课程设计题目:4位串行数字密码锁 学号:201420130326 学生姓名:谢渊良 专业:通信工程 班级:1421302 指导教师:钟凯 2017年1月5日
1.摘要 随着科技的发展数字电路的各种产品广泛应用,传统的机械锁由于其构造的简单,安全性不高,电子密码锁其保密性高,使用灵活性好,安全系数高,使用方便,将会是未来使用的趋势。本设计使用EDA设计使设计过程廷到高度自动化,其具有强大的设计功能、测试、仿真分析、管理等功能。使用EDA环境完成电路的系统综合设计和仿真。用VHDL可以更加快速、灵活地设计出符合各种要求的密码锁。本设计基于Verilog HDL语言来设计密码锁,先介绍设计要求和整体设计思想,随后对所使用各模块分别为键盘模块、连接模块、控制模块进行了介绍,给出各个模块的主要代码,在对各个模块的功能进行仿真。 关键字:密码锁 Verilog HDL 2.设计内容 设计一个4位数字密码锁子系统 1)1.2设计要求开锁密码为4位二进制,当输入密码与锁内给定的密码一致时,方可开锁。否则进入“错误”状态,发出报警信号。 2)锁内的密码可调。 3)串行数字密码锁的报警,直到按下复位开关,才停下。此时,数字密码锁又自动等待下一个开锁状态。 3.系统设计 本设计中,FPGA系统采用硬件描述语言Verilog按模块化方式进行设计,并用modersim软件对各个模块进行编写仿真。 3.1键盘模块 键盘电路理想接口图: flag 设计原理: 本模块采用2×2的扫描键盘电路,对输入信号进行采集,此模块的主要功能是每按下一个
按键,flag产生一个矩形波,作为连接模块的触发信号。同时key_value值为所按下键的编码值,与flag一同传入连接模块。 实际设计接口图: 键盘模块仿真图: 跟据图中所示当输出kevalue:10值的时候,flag出现一个矩形波。 当输出kevalue:11值的时候,flag再次出现上跳沿。实际上,上面的图写的测试文件是有一点错误的,当a扫描到第三个值(01)时,b在实际电路中应该是01而不是11,此时根据程序flag应置为1,当然此时flag本来就是1,不会发生错误。在实际中,时钟频率跳的如此之快,人按一下按键的持续时间还是有的,所以flag应在按键按完后再下降下来。不然多出很多无用的矩形波,这个装置就没用了。 3.2连接模块 连接模块接口图:
Linux input子系统学习小结 -
Linux input子系统学习小结 目录 一基本框架 二注册流程 三事件触发流程 摘要 本文inuxinpu子系统学习小结,抓住input子系统里面的几个关键点(handle,handler,设备文件,client)形成的简洁小结,简化理解。
一基本框架 linux中输入设备驱动的分层如下图所示: 图1 linux中输入设备的分层---from网络 原理以及为什么要设计这样一个系统,详细请参考其他资料
二注册过程: 如图2 图2 Input 子系统在初始化时,首先调用register_chrdev(INPUT_MAJOR, "input", &input_fops); 为自己注册了256个字符设备节点。(这也代表着系统中最多可以存在256个输入设备)这256个设备会被分为8类,分别对应于数组input_table[8]中存放的8个handler. staticstructinput_handler *input_table[8]; // kernel/input/input.c 其中数第1个句柄管理次设备号0-31,第2个句柄管理设备号32-63,以此类推….. 每一个句柄,都可以用来实现一类事件驱动(但每类事件驱动最多只能管理32个设备)。 例如:/dev/input/eventX所表示的设备和dev /input/mouseX所表示的设备就分别使用了最常见的两种事件驱动。以/dev/input/eventX 为例,他们都使用同一个event事件驱动,从对象的角度看,拥有同一个handler。而这个handler 所管理的设备,拥有次设备号64-95,每一个次设备号又可以对应到一个handle. /sys/devices/virtual/input/的目录和文件创建在什么时候? mtk_tpd.c -----》(tpd->dev=input_allocate_device())调用input_dev_attr_groups数组来创建。
(完整word版)tps系统概述
TPS 系统概貌 一、什么是 TPS? TPS(Total Plant Solution) 即全厂一体化控制系统是在 HoneyWell TDC-300 集散控制系统(DCS)基础上向“系统开放而且安全”方向发展的高级系统,他将过程控制网络、实时操作网络、工厂信息网络融为一体,构成三条网络管理控制一体化。 二、TPS 系统的特点 1、TPS 是一个统一的平台:他将用户的商业信息和全厂控制系统无痕迹的集成在 一起。 2、 TPS 是开放的:它基于 MS Windows NT 工作站。 TPS 被设计为 Native Window 而嵌入在 NT 环境中,它拥有 NT 的更多功能,且灵活易使用。 3、TPS 核心技术:TPS 将各种技术集成在一起。包括:Windows NT 操作系统, OLE 公共软件,ODBC 公共数据库技术。 4、TPS 提供唯一的人机接口:TPS 提供唯一的人-机接口,即 GUS,是基于 Windows 界面。 5、TPS 开放仍然安全:TPS 系统采用安全的工业网络。 三、TPS 系统网络结构 1、PCN:计算机局域网。 包括普通的 PC 操作平台。可在其上运行应用软件及 HoneyWell 的一些离线组态软件如 TPS Builder,Dispiay Builder 等。 2、TPN(LCN):控制管理网包括: GUS/US/UXS/UWS APP/AM/AXM/CG/PCNM/HM/PHD/NIM/HG/EPLCG 3、过程控制网 UCN 网络包括:NIM/HPM/APM/PM/LM/SM Data Hiway 网络包括:HG/MC/AMC/CB/EC/PIU EPLCG 网络包括:EPLCG/PLC TPS 系统主要硬件介绍 一、 TPN(LCN)网络设备 LCN 是一条通信速度 5Mbit/s、冗余的通信总线,用以支 持网络节点模件之间的通信,采用 IEEE802.4 协议、串行传输信号,为广播式通信、
Saturation
Saturation 限制信号的范围 库 不连续 Saturation块施加输入信号的上限和下限。 Saturation块接受以下数据类型的实际信号:?浮点 ?内置整数 ?固定点 见Data Types Supported by Simulink
Saturation块对话框中的Main窗格中显示如下: Saturation块的Signal Attributes窗格中的对话框中显示如下:
Show data type assistant 显示的数据类型助理 设置 Data Type Assistant帮助您设置Output data type参数. 见Specify Block Output Data Types. 命令行信息 见Block-Specific Parameters. Upper limit 指定在输入信号上的上限。 设置 默认:0.5
Minimum:值从Output minimum参数 Maximum:值从Output maximum参数 Tip ?当Saturation块的输入信号高于此值,块的输出被裁剪到这个值。 ?Upper limit参数转换为输出数据类型在脱机状态下使用舍入到最近的饱和度。 命令行信息 见Block-Specific Parameters. Lower limit 指定输入信号的下限。想 设置 默认:-0.5 Minimum:值从Output minimum参数 Maximum:值从Output maximum参数 Tips ?当Saturation块的输入信号低于此值,则块的输出被裁剪到这个值。 ?下限参数转换为输出数据类型在脱机状态下使用舍入到最近的饱和度命令行信息 见Block-Specific Parameters. Treat as gain when linearizing 选择此参数会导致增益视为 1 的线性化命令 设置