第十章视觉 (2)

第十章视觉、听觉和前庭感觉
机体生活在外环境中,细胞沐浴在机体内环境中。内,外环境的变化,通过各种感觉器官
的活动将信息传至中枢神经系统,机体才能感知其变化,并作出相应的适宜反应。
感受器指分布在体表或各种组织内部能够感受内、外环境变化的特殊结构。如视网膜的感光细胞,耳蜗的毛细胞等。有一些感受器在进化过程中产生了有利于感受的附属装置,通常将这种感受器及其附属装置称为感觉器官,如眼、耳等。
各种感受器具有一些共同的特点。①感受器换能作用t在功能上,感受器都起着换能器的作用,即把环境中一定形式的能量变化转变为神经冲动的变化。感受器在受到适宜刺激后,首先在感受器细胞上引起一个局部电位变化,称为感受器电位。它以电紧张形式扩布,使传入神经纤维的膜发生去极化,当去极化达到阈电位时,就引起传向中枢的神经冲动’②适宜刺激;各种感受器都有各自最敏感的刺激。如光波是视网膜感光细胞的适宜刺激}声波是内耳耳蜗毛细胞的适宜刺激l③感觉适应·指在刺激强度持续不变的情况下,感受器对其适宜刺激的敏感性逐渐减弱的现象。适应的快慢因感受器种类而不同·并各有其生理意义。如嗅觉适应较快,有利于感受器再次接受新的刺激’颈动脉窦,主动脉弓,肌梭等感受器
适应较慢,有利于机体对某些功能如血压、姿势等进行持续的监测。适应不是疲劳。
本章着重介绍眼、耳感觉器官所产生的视觉、听觉和前庭感觉。
第一节视觉
现代科学研究表明,至少有95%以上的外界信息是由视觉系统所接受、处理和感知的·因而视觉器官是人体最重要的感觉器官。
视觉由眼、视神经、视觉中枢的共同活动完成。人眼的适宜刺激是波长为370~740nm 的电磁波。
人眼的基本结构见图10一1。眼球壁由最外的巩膜一角膜层、中间的脉络膜层和靠内的视
网膜层组成。眼球内容物有房水、晶状体和玻璃体等折光物质。在眼球后极视网膜中央部有一黄斑区。直径约l~3mra,黄斑中心为中央凹,是视觉最敏感的部位a中央凹鼻侧约3ram 处是视神经乳头,投有感光细胞,称为盲点。
一、眼的折光系统及其调节
(一)眼的折光系统及其成象原理
眼的折光系统由角膜、房水、晶状体和玻璃体组成。它们构成4个折光界面t①空气一角膜前表面}②角膜后表面一房水l③房水一晶状体前表面,④晶状体’玻璃体。各折光体的
曲率半径和折光指数都不相同,因此眼的折光系统十分复杂。
为了便于理解视网膜上成象的原理,多采用简化眼作为研究对象(图10—2)。简化眼
是假想的人工模型,其光学参数与正常眼等值。设想眼球为一单球面折光体,前后径为
A
第十章视觉、听觉和前庭感觉
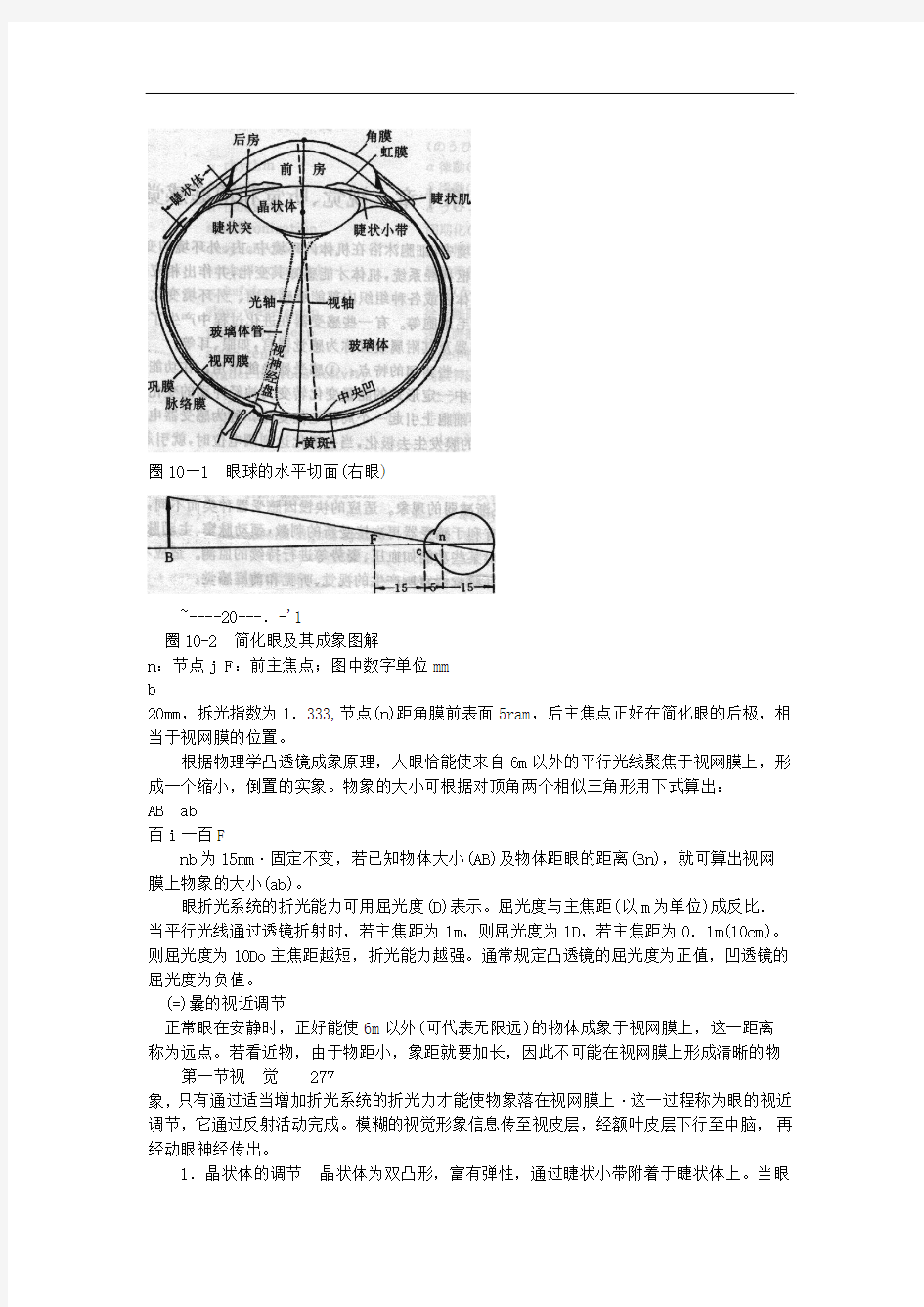
圈10—1 眼球的水平切面(右眼)
~----20---.-'1
圈10-2 简化眼及其成象图解
n:节点j F:前主焦点;图中数字单位mm
b
20mm,拆光指数为1.333,节点(n)距角膜前表面5ram,后主焦点正好在简化眼的后极,相当于视网膜的位置。
根据物理学凸透镜成象原理,人眼恰能使来自6m以外的平行光线聚焦于视网膜上,形成一个缩小,倒置的实象。物象的大小可根据对顶角两个相似三角形用下式算出:
AB ab
百i一百F
nb为15mm·固定不变,若已知物体大小(AB)及物体距眼的距离(Bn),就可算出视网膜上物象的大小(ab)。
眼折光系统的折光能力可用屈光度(D)表示。屈光度与主焦距(以m为单位)成反比.当平行光线通过透镜折射时,若主焦距为lm,则屈光度为1D,若主焦距为0.1m(10cm)。则屈光度为10Do主焦距越短,折光能力越强。通常规定凸透镜的屈光度为正值,凹透镜的屈光度为负值。
(=)曩的视近调节
正常眼在安静时,正好能使6m以外(可代表无限远)的物体成象于视网膜上,这一距离称为远点。若看近物,由于物距小,象距就要加长,因此不可能在视网膜上形成清晰的物第一节视觉 277
象,只有通过适当增加折光系统的折光力才能使物象落在视网膜上·这一过程称为眼的视近调节,它通过反射活动完成。模糊的视觉形象信息传至视皮层,经额叶皮层下行至中脑,再经动眼神经传出。
1.晶状体的调节晶状体为双凸形,富有弹性,通过睫状小带附着于睫状体上。当眼
看远物时,睫状肌弛缓,睫状小带被拉紧,使晶状体被牵拉而呈扁平。当视近物时,通过反射
使睫状肌收缩。睫状肌有环形纤维和辐射状纤维,环形肌纤维收缩可使睫状体周径缩小,辐射状肌纤维收缩可使睫状体向前移动。因此,睫状肌收缩可使睫状小带放松,晶状体发生弹性回位而曲率增加,以其前表面的中央部分向前凸出最为显著(图10—3)。晶状体的这种改变
增加了它的折光能力,使近处的辐散光线仍
能聚焦在视网膜上形成清晰的物象。睫状肌
受动服神经中副交感神经纤维支配,该神经
发自中脑动眼神经缩瞳核,在睫状神经节换
神经元。
人眼作充分调节时能看清物体的最近距
离,称为近点。晶状体弹性越好·则近点越
近。眼作最大限度调节时所能增加的折光能
力,称为眼的调节能力。老年人晶状体弹性
减弱,眼的调节能力减弱,近点变远,称为老
视。老视眼时,远处平行光线仍能聚焦予视
网膜上,但近处的光线则聚焦在视网膜后方,
圈10—5眼调节前后睫状体位置和
晶状体形状改变
点线表示看近物时的情况
因此,在视近物时须戴上适当折光度的凸透
镜。
2.瞳孔的调节当视近物时,瞳孔缩小,称为瞳孔调节反射或瞳孔近反射。其反射通路与晶状体调节相似,也是由动眼神经中副交感神经纤维支配,使瞳孔括约肌收缩,瞳孔缩小。瞳孔近反射的生理意义是减少进入眼内的光线量和减少折光系统的球面象差和色象差,使视网膜上形成更清晰的象。
3.视轴会聚指视近物时,两个眼的视轴同时向鼻侧聚合。其目的是使近处物象能落
在两眼视网膜的相称点上(如中央凹),产生单一清晰的象。它也是反射活动,由动眼神经中躯体运动纤维传出,支配眼内直肌收缩。
(三)眼的届光不正
在无需调节的状态下,平行光线能在视网膜上聚焦成象的眼,称为正视眼(图10一4A)a 如果平行光线不能在视网膜上形成清晰的象则称为屈光不正·它包括近视,远视和散光3种·
1.近视指平行光线聚焦成象在视网膜之前。因此,近视眼看远物不清,但它看近处
物体时,由于光线辐散,象距加长,则眼不需进行调节或只进行较小程度的调节,就可在视网
膜上成象。近视眼的远点和近点都比正视眼近。近视的发生,多数因眼球前后径过长,也有
因折光系统的折光力过强所致。矫正近视可用凹透镜,使入眼的平行光线适当分散,就能成象于视网膜上(图10—4B)。
2.远视指平行光线聚焦成象在视网膜之后。远视眼看远物时,就需要睫状肌收缩,经过眼的调节,使物象聚焦于视网膜上。当它看近处物体时,需要进行更大程度的调节才能看清物体。由于晶状体的调节有一定限度,所以远视眼的近点较正视眼远,而且容易发生调
278 Stii[视觉、听觉和前庭感觉
节疲劳,引起头痛等。远视的发生多数由于眼球的前后径过短。幼儿眼球小,眼轴过短,多呈远视,到6岁左右发育成正视眼。矫正远视可用凸透镜,使远处平行光线不需晶状体调节就能在视网膜上形成清晰的象(图10一4C)。
3·散光是由于折光面在不同方向上,曲率半径不同,因此各点的平行光线不能同时聚焦于视网膜上。凡通过曲率半径小处的光线,聚焦于视网膜前方}通过曲率半径大处的光线,聚焦于视网膜后方,因此在视网膜上成象不清晰或产生变形(图10一4D)。散光常发生于
角膜表面,少数发生在晶状体表面。矫正散光可用圆柱形透镜,在曲率半径过大的方向上增加折光能力.
A
B
C
二、瞳孔和瞳孔对光反射
圈10一4 眼的折光异常
D散光
瞳孔的功能是调节进入眼内的光量。瞳孔为虹膜中间的开孔,直径变动于1.5~8.Omm 之间。虹膜内有两种平滑肌,①环形的瞳孔括约肌收缩,可使瞳孔缩小。它由动眼神经中副交感神经纤维支配’②辐形的瞳孔散大肌收缩。可使瞳孔散大。它由交感神经支配。
随照射视网膜光线的强弱而出现瞳孔大小的改变,称为瞳孔对光反射。当强光照射时,瞳孔缩小I反之,瞳孔散大,用以调节进入眼内的光量。一侧眼受光照射时,两侧瞳孔均呈收
缩反应,称为互感反应。
瞳孔对光反射主要是副交感神经的作用。其感受器是视网膜,经视神经传人。中枢在中脑的顶盖前区和两侧动眼神经缩瞳核。当中脑有损害时,瞳孔对光反射的互感反应失灵。或出现两侧瞳孔在同一时间不等大。临床上可通过检查这一反射来了解中脑的功能状况。兰、视网膜的感光功能
外界物体通过眼的折光系统,在视网膜上形成清晰的物象。但要看到物体,产生视觉。必须通过视网膜的感光作用,经过光’电换能机制,将光能转换为视神经上的动作电位,最后传人视皮层才能完成。
第一节视觉 279
(一)感光细胞及其功能
组织学将视网膜分为10屡,总厚度为O.1~0.Smm,主要含有5种细胞l感光细胞、水
平细胞、双极细胞、无长突细胞和神经节细胞。水平细胞和无长突细胞起横向信息整合作用。感光细胞、双极细胞和神经节细胞的联系
感光细胞分视杆细胞和视锥细胞两种,
均由外段、内段、胞体和终足4部分组成(图
10—6)。外段是视色素集中的部位,在感光换
能过程中起重要作用。视杆细胞数目较多,
其分布区域多在视网膜的外周部。该细胞细
长,外段呈圆柱状,由层叠的膜质盘状结构
——视盘组成,视盘膜表面富含蛋白的色素
分子,称为视紫红质。视锥细胞数目较少。多
分布在近视网膜中心部及周围,在人的中央
凹处最密集。该细胞的大小视所在部位丽
定,中央凹处较细长,外周部较粗短。视锥细
胞的外段呈圆锥状,其胞膜向内折叠,亦形成
盘状。根据光谱敏感性的不同,人视锥细胞
可分为红敏、绿敏,蓝敏3种视锥细胞。
《机器视觉及其应用》习题
第一章机器视觉系统构成与关键技术 1、机器视觉系统一般由哪几部分组成?机器视觉系统应用的核心目标是什么?主要的分 成几部分实现? 用机器来延伸或代替人眼对事物做测量、定位和判断的装置。组成:光源、场景、摄像机、图像卡、计算机。用机器来延伸或代替人眼对事物做测量、定位和判断。三部分:图像的获取、图像的处理和分析、输出或显示。 2、图像是什么?有那些方法可以得到图像? 图像是人对视觉感知的物质再现。光学设备获取或人为创作。 3、采样和量化是什么含义? 数字化坐标值称为取样,数字化幅度值称为量化。采样指空间上或时域上连续的图像(模拟图像)变换成离散采样点(像素)集合的操作;量化指把采样后所得的各像素的灰度值从模拟量到离散量的转换。采样和量化实现了图像的数字化。 4、图像的灰度变换是什么含义?请阐述图像反色算法原理? 灰度变换指根据某种目标条件按照一定变换关系逐点改变原图像中每一个像素灰度值,从而改善画质,使图像的显示效果更加清晰的方法。对于彩色图像的R、G、B各彩色分量取反。 第二章数字图像处理技术基础 1、对人类而言,颜色是什么?一幅彩色图像使用RGB色彩空间是如何定义的?24位真彩 色,有多少种颜色? 对人类而言,在人类的可见光范围内,人眼对不同波长或频率的光的主观感知称为颜色。 一幅图像的每个像素点由24位编码的RGB 值表示:使用三个8位无符号整数(0 到255)表示红色、绿色和蓝色的强度。256*256*256=16,777,216种颜色。 2、红、绿、蓝三种颜色为互补色,光照在物体上,物体只反射与本身颜色相同的色光而吸 收互补色的光。一束白光照到绿色物体上,人类看到绿色是因为? 该物体吸收了其他颜色的可见光,而主要反射绿光,所以看到绿色。 3、成像系统的动态范围是什么含义? 动态范围最早是信号系统的概念,一个信号系统的动态范围被定义成最大不失真电平和噪声电平的差。而在实际用途中,多用对数和比值来表示一个信号系统的动态范围,比如在音频工程中,一个放大器的动态范围可以表示为: D = lg(Power_max / Power_min)×20; 对于一个底片扫描仪,动态范围是扫描仪能记录原稿的灰度调范围。即原稿最暗点的密度(Dmax)和最亮处密度值(Dmin)的差值。 我们已经知道对于一个胶片的密度公式为D = lg(Io/I)。那么假设有一张胶片,扫描仪向其投射了1000单位的光,最后在共有96%的光通过胶片的明亮(银盐较薄)部分,而在胶片的较厚的部分只通过了大约4%的光。那么前者的密度为: Dmin=lg(1000/960)= 0.02; 后者的密度为: Dmax=lg(1000/40)= 1.40 那么我们说动态范围为:D=Dmax-Dmin=1.40-0.02=1.38。
机器视觉测量技术
机器视觉测量技术 杨永跃 合肥工业大学 2007.3
目录第一章绪论 1.1 概述 1.2 机器视觉的研究内容 1.3 机器视觉的应用 1.4 人类视觉简介 1.5 颜色和知觉 1.6 光度学 1.7 视觉的空间知觉 1.8 几何基础 第二章图像的采集和量化 2.1 采集装置的性能指标 2.2 电荷藕合摄像器件 2.3 CCD相机类 2.4 彩色数码相机 2.5 常用的图像文件格式 2.6 照明系统设计 第三章光学图样的测量 3.1 全息技术 3.2 散斑测量技术 3.3 莫尔条纹测量技术 3.4 微图像测量技术 第四章标定方法的研究 4.1 干涉条纹图数学形成与特征 4.2 图像预处理方法 4.3 条纹倍增法 4.4 条纹图的旋滤波算法 第五章立体视觉 5.1 立体成像
5.2 基本约束 5.3 边缘匹配 5.4 匹域相关性 5.5 从x恢复形状的方法 5.6 测距成像 第六章标定 6.1 传统标定 6.2 Tsais万能摄像机标定法 6.3 Weng’s标定法 6.4 几何映射变换 6.5 重采样算法 第七章目标图像亚像素定位技术 第八章图像测量软件 (多媒体介绍) 第九章典型测量系统设计分析9.1 光源设计 9.2 图像传感器设计 9.3 图像处理分析 9.4 图像识别分析 附:教学实验 1、视觉坐标测量标定实验 2、视觉坐标测量的标定方法。 3、视觉坐标测量应用实验 4、典型零件测量方法等。
第一章绪论 1.1 概述 人类在征服自然、改造自然和推动社会进步的过程中,面临着自身能力、能量的局限性,因而发明和创造了许多机器来辅助或代替人类完成任务。智能机器或智能机器人是这种机器最理想的模式。 智能机器能模拟人类的功能、能感知外部世界,有效解决问题。 人类感知外部世界:视觉、听觉、嗅觉、味觉、触觉 眼耳鼻舌身 所以对于智能机器,赋予人类视觉功能极其重要。 机器视觉:用计算机来模拟生物(外显或宏观)视觉功能的科学和技术。 机器视觉目标:用图像创建或恢复现实世界模型,然后认知现实世界。 1.2 机器视觉的研究内容 1 输入设备成像设备:摄像机、红外线、激光、超声波、X射线、CCD、数字扫描仪、 超声成像、CT等 数字化设备 2 低层视觉(预处理):对输入的原始图像进行处理(滤波、增强、边缘检测),提取角 点、边缘、线条色彩等特征。 3 中层视觉:恢复场景的深度、表面法线,通过立体视觉、运动估计、明暗特征、纹理 分析。系统标定 4 高层视觉:在以物体为中心的坐标系中,恢复物体的完整三维图,识别三维物体,并 确定物体的位置和方向。 5 体系结构:根据系统模型(非具体的事例)来研究系统的结构。(某时期的建筑风格— 据此风格设计的具体建筑) 1.3 机器视觉的应用 工业检测—文件处理,毫微米技术—多媒体数据库。 许多人类视觉无法感知的场合,精确定量感知,危险场景,不可见物感知等机器视觉更显其优越十足。 1 零件识别与定位
机器视觉测量技术
机器视觉测量技术杨永跃合肥工业大学 2007.3 目录 第一章绪论 1.1 概述 1.2 机器视觉的研究内容 1.3 机器视觉的应用 1.4 人类视觉简介 1.5 颜色和知觉 1.6 光度学 1.7 视觉的空间知觉 1.8 几何基础 第二章图像的采集和量化 2.1 采集装置的性能指标 2.2 电荷藕合摄像器件 2.3 CCD 相机类 2.4 彩色数码相机 2.5 常用的图像文件格式
2.6 照明系统设计 第三章光学图样的测量 3.1 全息技术 3.2 散斑测量技术 3.3 莫尔条纹测量技术 3.4 微图像测量技术 第四章标定方法的研究 4.1 干涉条纹图数学形成与特征4.2 图像预处理方法 4.3 条纹倍增法 4.4 条纹图的旋滤波算法 第五章立体视觉 5.1 立体成像 2 5.2 基本约束 5.3 边缘匹配 5.4 匹域相关性 5.5 从 x 恢复形状的方法 5.6 测距成像
第六章标定 6.1 传统标定 6.2 Tsais 万能摄像机标定法 6.3 Weng ’ s 标定法 6.4 几何映射变换 6.5 重采样算法 第七章目标图像亚像素定位技术第八章图像测量软件 (多媒体介绍 第九章典型测量系统设计分析9.1 光源设计 9.2 图像传感器设计 9.3 图像处理分析 9.4 图像识别分析 附:教学实验 1、视觉坐标测量标定实验 2、视觉坐标测量的标定方法。 3、视觉坐标测量应用实验 4、典型零件测量方法等。
3 第一章绪论 1.1 概述 人类在征服自然、改造自然和推动社会进步的过程中,面临着自身能力、能量的局限性, 因而发明和创造了许多机器来辅助或代替人类完成任务。智能机器或智能机器人是这种机器最理想的模式。 智能机器能模拟人类的功能、能感知外部世界,有效解决问题。 人类感知外部世界:视觉、听觉、嗅觉、味觉、触觉 眼耳鼻舌身 所以对于智能机器,赋予人类视觉功能极其重要。 机器视觉:用计算机来模拟生物(外显或宏观视觉功能的科学和技术。 机器视觉目标:用图像创建或恢复现实世界模型,然后认知现实世界。 1.2 机器视觉的研究内容 1 输入设备成像设备:摄像机、红外线、激光、超声波、 X 射线、 CCD 、数字扫描仪、超声成像、 CT 等 数字化设备 2 低层视觉(预处理 :对输入的原始图像进行处理(滤波、增强、边缘检测 ,提取角点、边缘、线条色彩等特征。 3 中层视觉:恢复场景的深度、表面法线,通过立体视觉、运动估计、明暗特征、纹理分析。系统标定
机器视觉行业市场调研报告
机器视觉 市场调研报告 营业部:李凯丽 2015年9月2日
机器视觉技术是一项新兴产业,自起步发展至今,机器视觉在中国经历了三个发展阶段,其功能以及应用范围随着工业自动化的发展也在逐渐完善和推广。而在世界范围内,机器视觉已经为人类解决了许多重大问题,由于机器视觉自身领域的特点,目前应用于工业、农业、交通运输业、新兴行业等多领域,创造了人工无法比拟的经济和社会价值。本文从机器视觉的发展、机器视觉的应用领域、竞争状态、市场规模和预测等多方面,调研了机器视觉行业的发展状态,为公司投资机器视觉领域提供了参考依据。 关键词:机器视觉、市场规模、竞争、前景
第一章机器视觉发展背景 (3) 1.1 机器视觉综述 (3) 1.1.1 机器视觉定义及组成 (3) 1.1.2 行业发展阶段 (5) 1.1.3 机器视觉特点及应用优点 (6) 1.2 机器视觉行业发展特性 (7) 1.3 产业链分析 (8) 1.4 行业发展环境分析 (9) 1.4.1 行业政策环境 (9) 1.4.2 行业技术环境分析 (10) 第二章国际机器视觉行业发展趋势和现状 (11) 2.1 市场发展规模 (11) 2.1.1 产业发展历程 (11) 2.1.2 应用现状分析 (12) 2.1.3 产业市场规模和格局 (13) 2.2 行业分布状况和发展趋势 (14) 2.2.1 产业地区分布情况 (14) 2.2.2 发展趋势预测 (16) 第三章中国机器视觉行业的发展现状和趋势 (18) 3.1 发展现状及市场规模 (18) 3.1.1 产业发展历程 (18) 3.1.2 市场规模 (19) 3.2 行业竞争现状 (21) 3.2.1 行业竞争主体 (21) 3.2.2 企业分布状况 (26) 3.3 发展趋势 (27) 第四章机器视觉的应用 (29) 4.1 应用领域分布 (29) 4.2 机器视觉在各行业的应用情况 (30) 4.2.1 在工业领域中的应用 (30) 4.2.2 在农业领域中的应用 (34) 4.2.3 在医药行业中的应用 (36) 4.2.4 在交通领域中的应用 (37) 第五章机器视觉行业发展前景与投资建议 (39) 5.1 发展前景及进入壁垒 (39) 5.2 投资机会和风险 (41)
计算机图像处理与机器视觉复习重点
第一章概述 点运算:在图像处理中,只输入该像素本身的灰度的运算方式。 领域运算:在图像处理中,不仅输入该像素f0本身的灰度,还要以该像素f0为中心的某局部领域(即邻域)中的一些像素的灰度进行运算的方式。 对比度/清晰度:画面黑与白的比值,也就是从黑到白的渐变层次。比值越大,从黑到白的渐变层次就越多,从而色彩表现越丰富。【维基百科,课件上没找到】 第二章图像预处理 一、灰度变换(点运算) 目的:改善图像的灰度对比度或满足图像上灰度的某些特殊要求(问题:灰度偏暗或偏亮;范围不足;局部层次差) 1、灰度范围移动处理 g(i,j)=f(i,j)+d 当d>0时,灰度范围向高端移动,图像变亮; 当d<0时,灰度范围向低端移动,图像变暗; 2、灰度线性变换 (1)整体灰度线性变换 (g a=0,g b=255) (2)局部灰度线性变换 a. 限幅灰度拉伸-局部感兴趣(局部灰度拉伸到最大限度,而无用信息被抑制为黑色 或白色的单一灰度) b. 锯齿形灰度拉伸 将输入图像中不同灰度区间[f1,f2]、[f2,f3]、[f3,f4] 进行同样的灰度拉伸,使各个灰度区间都扩展到 允许的整个灰度范围[g a,g b]。 使输入图像中原来是缓慢变化的灰度,经变换后 在这些区间的f1、f2、f3等分割点的两端灰度发生 了突变。 c. 阈值灰度拉伸-二值图像
3、灰度非线性变化 (1)对数变化 g(i,j)=log[f(i,j)] 变换后的图像中低灰度区的灰度值 得到了拉伸,即对比度增强,而高灰度区 的灰度值被压缩,并且高低灰度区的灰度 过度平滑。 (2)连续函数变化 (3)二次变化 G(x,y)=f(x,y)2,0 目录 第一章图像增强 (3) 1.1 空域变换增强 (3) 1.1.1直接灰度调整 (4) 1.1.2 直方图处理 (10) 1.1.3 图像间的代数运算 (14) 1.2 空域滤波增强 (16) 1.2.1 基本原理 (16) 1.2.2平滑滤波器 (17) 1.2.3 锐化滤波器 (20) 1.3 频域增强 (23) 1.3.1低通滤波 (24) 1.3.2高通滤波 (24) 第二章图像恢复和重建 (26) 2.1退化模型 (26) 2.1.1连续退化模型 (27) 2.1.2离散退化模型 (28) 2.2复原的代数方法 (29) 2.2.1逆滤波复原 (29) 2.2.2最小二乘方滤波 (30) 2.3 MATLAB实现图像复原 (30) 第三章图像编码与压缩 (33) 3.1图像编码与压缩概述 (33) 3.1.1图像压缩与编码的必要性 (33) 3.1.2图像压缩编码的分类 (33) 3.2无损压缩技术 (34) 3.2.1无损压缩技术概述 (34) 3.2.2霍夫曼(huffman)编码 (35) 3.2.3行程编码 (38) 3.3有损压缩编码 (40) 3.3.1有损压缩编码原理 (40) 第四章图像分割 (45) 4.1灰度阈值分割法 (45) 4.1.1双峰法 (45) 4.1.2 p-参数法 (46) 4.1.3最大方差自动取阈法 (46) 4.2边缘检测方法 (49) 4.2.1边缘算子法 (49) 第五章工件尺寸和面积测量 (53) 5.1 图像采集部分 (54) 5.2 图像处理与面积计算部分 (54) 5.2.1 图像预处理 (54) 5.2.2 工件面积计算 (55) 第六章车牌识别 (63) 6.1 总体设计方案 (63) 6.2 各模块实现方法 (64) 实验一 MATLAB基本图像处理算法实验 (78) 实验二机器视觉基本程序编写实验 (79) 实验三尺寸测量 (80) 实验四模式识别 (81) 第一章图像增强的研究和发展现状 图像在采集过程中不可避免的会受到传感器灵敏度、噪声干扰以及模数转换时量化问题等各种因素的影响,而导致图像无法达到令人满意的视觉效果,为了实现人眼观察或者机器自动分析、识别的目的,对原始图像所做的改善行为,就被称作图像增强。图像增强包涵了非常广泛的内容,凡是改变原始图像的结构关系以取得更好的判断和应用效果的所有处理手段,都可以归结为图像增强处理,其目的就是为了改善图像的质量和视觉效果,或将图像转换成更适合于人眼观察或机器分析、识别的形式,以便从中获取更加有用的信息。 常用的图像增强处理方式包括灰度变换、直方图修正、图像锐化、噪声去除、几何畸变校正、频域滤波和彩色增强等。由于图像增强与感兴趣的物体特性、观察者的习惯和处理目的密切相关,尽管处理方式多种多样,但它带有很强的针对性。因此,图像增强算法的应用也是有针对性的,并不存在一种通用的、适应各种应用场合的增强算法。于是,为了使各种不同特定目的的图像质量得到改善,产生了多种图像增强算法。这些算法根据处理空间的不同分为基于空间域的图像增强算法和基于变换域的图像增强算法。基于空间域的图像增强算法又可以分为空域的变换增强算法、空域的滤波增强算法以及空域的彩色增强算法;基于变换域的图像增强算法可以分为频域的平滑增强算法、频域的锐化增强算法以及频域的彩色增强算法。 尽管各种图像增强技术已取得了长足的发展,形成了许多成熟、经典的处理方法,但新的增强技术依然在日新月异地发展完善,不断推陈出新,其中尤其以不引起图像模糊的去噪声方法(如空域的局部统计法)和新的频域滤波器增强技术(如小波变换,K-L变换等)最为引人瞩目。 第二章图像增强的基本方法 一般而言,图像增强是根据具体的应用场景和图像的模糊情况而采用特定的增强方法来突出图像中的某些信息,削弱或消除无关信息,以达到强调图像的整体或局部特征的目的。常用的图像增强方法有灰度变换、直方图修正、噪声清除、图像锐化、频域滤波、同态滤波及彩色增强等。图像增强的方法主要分为两类:空域增强法和频域增强法。空域增强法直接针对图像中的像素,对图像的灰度进行处理;频域增强法是基于图像的Fourier变换式对图像频谱进行改善,增强或抑制所希望的频谱。 2.1灰度变换 灰度变换增强的原理如下:设r和s分别代表原始图像和增强图像的灰度,T(?)为映射函数,通过映射函数T(?),将原始图像f(x,y)中的灰度r映射成增强图像g(x,y)中的灰度 第二章基于机器视觉的自动检测系统机械部分设计 2.1 检测系统的总体框图 该检测系统由硬件和软件两个部分组成。硬件系统是由安装在滑块上的CCD摄像头、零件装夹机构和步进电机组成的能往复运动的信息采集系统。计算机通过步进电机控制卡控制步进电机转动,以及CCD摄像头从而实现扫描整个回转体类零件的运动,也即实现了回转体类零件的图像采集。采集得到的图像信息经图像采集卡被传输到计算机中并保存在指定位置以待后用。 软件系统的功能是对采集得到的回转体类零件的图片信息进行处理,包括图片拼接、图片预处理(滤波、灰度均衡、二值化处理)、边缘提取、边缘细化、曲线拟合、尺寸测量等过程,并目‘由光学原理来进行形状误差分析,最终得到要求的检测数据,将此数据与标准数据进行对比,由此判断产品的合格与否。整个系统框图如图2.1所示。 图2.1 检测系统框图 2.2检测系统的机械整体结构设计 这一系统的机械测量机构主要可以分为三部分。第一部分是移动CCD摄像头的纵向运动机构,此结构的作用是让CCD进行回转体类零件的图像像采集。第二部分是步进电机带动的回转体类零件以主轴为轴心的转动,此结构的作用是找到回转体类零件在圆周方向上四个拍摄位置。最后是光源系统,它为整个图像提供理想的背景和适合拍摄的光线。其机构的示意图如图2.2所示。 图2.2 检测机构简图 2.3装夹工作台的设计 这部分主要是如何实现工件的装夹以及定位。本系统的零件采用人工装夹的方式。由于零件在不同角度上都有要测量的数据,因此,设计时要求零件可以绕自身轴线转动。本系统设计时每拍摄一张图像后,零件便在步进电机的驱动下转动90度的角度,既每一个零件都需要被拍照四次,在步进电机的驱动下转动三次。由上这些功能对结构设计提出了要求。对于零件的装夹,我们利用一个三抓卡盘将零件的一端夹紧,而卡盘通过主轴由固定支座支撑,另一端由一个安装在可移动的支座上的浮动顶尖夹紧,这个可移动的支撑座可以满足不同零件不同的长度的需要。在卡盘与步进电机之间安装了联轴器,使两者之间的转动能够同步。设计的最终结构示意图如图2.3 所示。 机器视觉论文:基于机器视觉的弹体轮廓在线检测技术的研究 【中文摘要】基于机器视觉的检测系统具有非接触性、实时性、精度高等特点,近年来成为检测领域研究的热点并得到了广泛的应用。由于弹体的轮廓直接关系到炮弹的质量和性能,本文主要应用机器视觉检测技术对弹体轮廓进行实时在线检测,来提高炮弹的检测速率、检验效率及正确判决率。本文结合具体的应用详细的论述了机器视觉检测硬件系统的设计、图像处理的软件算法及采用MATLAB进行仿真。根据检测结果得出:该检测系统具有检测精度高、功能强大、硬件电路简单、便于维护等优点;而且在实现了自动检测的功能外,也实现了检测数据的实时存储、打印、显示,具有良好的可回溯性。图像处理部分是本文研究的核心,主要包括图像预处理、图像分割、边缘检测及亚像素边缘检测等算法,运用这些算法提取弹体的轮廓特征并进行检测误差分析。 【英文摘要】Based on machine vision detecting system has the Characteristics of non-contact, real-time, high precision etc, in recent years it has became a hotspot in field of detection and has been used widely. Because the cannonball contour directly relate to the quality and performance of the cannonballs, this article mainly apply machine vision detection technology to detect the contour of the cannonballs CCD 操作手册 科大视觉 SCI 目录 CCD 操作手册 (1) 目录 ............................................................................................................................................... I 第一章CCD基本操作 . (1) 1. CCD主界面操作 (1) 2. 系统参数 (2) 3. 设置界面 (2) 第二章各算子设置界面操作 (4) 1. 算子“找边” (4) 2. 算子“找圆” (6) 3. 算子“斑点” (7) 4. 算子“几何计算” (8) 5. 算子“设定坐标系” (9) 6. 算子“图像预处理” (11) 7. 算子“获取图像” (12) 8. 算子“绘图” (13) 9. 算子“发送命令” (14) 第三章工站2 (17) 1. 相机1 VHB吸料定位 T1,00 (17) 2. 相机1 housing定位 T1,01 (24) 3. 相机1 VHB复检 T1,02 (28) 4. 相机2 VHB定位 T2,00 (32) 第四章工站4 (34) 1. 相机3 Camera Pad吸料定位 T3,00 (34) 2. 相机3 Housing定位 T3,01 (38) 3. 相机3 Camera Pad复检1 T3.02 (41) 4. 相机3 Camera Pad复检2 T3.03 (41) 5. 相机4 Camera Pad定位 T4,00 (43) 第五章工站5 (47) 1. 相机5 Mesh吸料定位 T5,00 (47) 2. 相机5 Housing定位 T5,01 (49) 3. 相机5 Mesh复检 T5,02 (53) 4. 相机6 Mesh定位 T6,00 (56) 实际中的光源总有一定的发光面积 扩展光源。扩展光源表面的每个面元ds 沿某个方向r 有一定发光强度dI 沿r 观察,则 ds ′=ds cos θ 投影面积 则面元ds 沿r 方向的光度学亮度B 定义为在此方向上单位投影面积的发光强度。 高度: θφ θιc o s c o s ??Ω=?== dS d d dS dI dS dI B 单位:2m cd 被照表面照度:一个被光线照射的表面上的照度,为照射在单位面积上的光通量,设面积ds 上的光通量为d φ,则: 照度 dS d E φ = 单位:1×(勒[克斯]) 1Lx = 1 2m lm lm/㎡ 照度 光学系统的像面照度和其他表面的照度是必须了解的光学量。参看图1.4-1,从轴面上 的面元dA 1、辐射到接收面上的面元dA 2的辐射通量为: 2Φd =LdA 1d Ω,Cos θ 式中 12 2 21cos r dA d θ= Ω 图xx 辐射的传播 而从物面辐射到接收面的总辐射通量为 2112 12 2 2112cos dA dA dA r L A A A θ???=Φ 设物面是朗伯面,即L 与面元dA 1的位置无关,则 2 112 2 12 112 112 2 12 112c o s c o s c o s c o s dA dA r dA dA r LA A A A A θθθθ??Φ=??=Φ 由此 2112 2 1211212cos dA dA r cs F A A θθ??==ΦΦ 式中F 12称为辐射传输系数,它只与表面的形状、位置、大小和方向有关。是一纯粹几何量。F 12是一二重积分量,很难计算,不过现在已经对一些典型情况,计算出了结果,并且列出了表格,可供查阅。 像面照度 光学系统像面上的照度会受两方面的影响:(1)光学系统的会聚和发散作用;(2)光学系统的吸收、反射、散射和挡光的作用;为了简单起见,将忽略第(2)种影响,而对于第(1)种影响将通过光学系统的几何度G 表示出来,并使这一计算变得很简单。 几何度G 的定义为 T A A A dA dA r A G Ω=??=12 12122 12 11cos cos θθ 式中 212 12 2 12 1cos cos dA dA r A A T θθ??=Ω 这是投影立体角,它是接收面dA 2对物面dA 1所张立体角在物面法线方向的投影的积分。 几何度G 只和光源的几何尺寸、光源到光学系统的距离、光学系统的入瞳尺寸以及光学系统的结构有关。当光能通过光学系统且不存在损失时,G 是不变量,即在光学系统内的不同截面上,G 都是相同的。若从图1.4-2观察则有 Gs = Ge = Gx = Gi 式中Gs 、Ge 、Gx 、Gi 分别是光学系统的物面S 、入瞳面e 、出瞳面x 、像面i 的几何度。 智能机器视觉系统SV系列 使用手册(机械手) 为了获得最佳性能,请在使用本产品前阅读本手册。 请妥善保管本手册,以便随时查阅。 目录 序言............................................................................................................................................................................... - 3 -第一章本机的基本操作............................................................................................................................................... - 3 -本机的操作流程....................................................................................................................................................... - 3 -画面说明................................................................................................................................................................... - 4 -机械手连接设定....................................................................................................................................................... - 5 -第二章机械手校正....................................................................................................................................................... - 7 -相机位置选择........................................................................................................................................................... - 7 -校正方式选择........................................................................................................................................................... - 7 -自动校正................................................................................................................................................................... - 8 -手动校正................................................................................................................................................................. - 10 -第三章机械手工具设定............................................................................................................................................. - 13 -机械手工具的窗口界面......................................................................................................................................... - 14 -固定相机的抓取和放置......................................................................................................................................... - 14 -多台相机的抓取和放置......................................................................................................................................... - 15 -固定相机的位置补正............................................................................................................................................. - 15 -多台相机的位置补正............................................................................................................................................. - 17 -手部相机的抓取和放置......................................................................................................................................... - 17 -抓取偏移补正+放置............................................................................................................................................... - 18 -附件............................................................................................................................................................................. - 20 -修订记录................................................................................................................................................................. - 20 - 机器视觉基本构成 觉是一个古老的研究课题,到了70年代末,80年代初,MIT的马尔(D. Marr)教授创立了视觉计算理论,使视觉的研究前进了一大步。马尔首先解决了研究视学理论的策略问題,他认为视觉是一个复杂的信息处理问题,要完整地理解视觉,必须从三个不同的层次上对它进行解释:第一个层次是信息处理问题的计算理论,在这个层次上所研究的是对什么信息进行计算和为什么要进行这些计算;第二个层次是算法,它所研究的是如何进行所要求的计算,也就是要设计特定的算法;第三个层次是执行它研究完某一特定算法的具体机构。从计算理论这个层次来看,马尔教授提出视觉信息处理必须用三级内部表像加以描述,这三级表像是: 要素图(图像的表像),2. 5维图(可见表面的表像)和三维模型表像(用于识别的三维物体彤状表像对于机器人视觉技术,我们的主要任务是为机器人建造视觉系统。如同人类视觉系统的作用一样,机器人视觉系统将赋予机器人一种高级感觉机构,使得机器人能以智能和灵活的方式对其周围的环境作出反应。由于对机舞人系统应用领域不断提出更高的要求机器人视觉将越来越复杂。机器人视觉可以看作从三维环境的图像中抽取、描述和解释信息的过程,它可以划分为六个主要部分:①感觉;②预处理I③分割;④推述⑤识别;⑥解释,再根据实现上述各种过程所涉及的方法和技术的复杂性将它们归类,可分为三个处理层次:低层视觉处理、中层视觉处理和高层视觉处理。虽然各层次间没有明确的界限,但是这种划分对于将机器人视觉系统的固有处理过程加以分类提供了一种有用的结构。这就是本书要讲述的主要内容。 感觉是机器人获取图像的过程,本书的第二章和第三章讲述了景物和距离传感器:电视摄像机,CCD橡感器和超声波传感器视頻信号数字化技术;图像生成的两种方式以及图像模型.它系统、简要地介绍了图像从光学变成电信号的原理和方法,视频图像的数字化技术以及表示方法。 普通图像預处理的方法很多,在机器人视觉系统中使用的若干預处理方法,要考虑计算机运算速度和低成本的要求。在第四章中主要采用了两种预处理方法:一种是基于空域技术的方法;另一种是基于频域技术的方法。它主要解决图傕的增强,平滑、尖锐化、滤肢以及伪彩色处理问题。 分割是将图像划分成若干个有一定含义的物体的过程.它是机器人视觉技术中重要的一步,是视觉技术领域中既古老而又年轻的课题,几年前这方面的文章很多,现在这方面的文畎也还很多?第五章我们简要而综合地介绍了分割技术所采用的几种方法:灰度阈值法,边缘检澍,匹配和拟合,区域跟综和增长,迭代松弛法以及运动分割等描述是为了进行识别而从物体中抽取持征的过程,在理想情况下,描述符应该与物体的大小,位置、方向无关,应该含有足够多的可用于鉴别的信息,以便在众多的物体中唯一地识别某物体。播述符的质量会影响识别算法的复杂性,而且也会影响识别的性能。第六章介绍了表示方法,再根据表示方法的不同计算物体的几何特性和拓扑特征,同时还介绍了边界描述符和域描述符。 识别是一种标记过程。换句话说,识别算法的功能在于识别景物中每个已分割的物体,并賦于该物体以某种标记,第七章介绍的识别方法可分两大类:决:策理论方法和结构方法^决策理论方法以定量揹述为基础,即统计模式识别方法而结构方法依輳于符号描述及它们的关系,即句法模式识别方法。当然介绍上述方法时,要结合机器人视觉的具体问题如统计纹理,链码边界的方向序列 1、机器视觉的引入:自动化和电脑技术是机器视觉进入工业生产线的关键要素。 2、人类大脑、四肢、感官和神经分别可以对应CPU、运动控制、传感器和网络。 3、在很多情况下人类视觉越发不能满足要求:高速、高精、超视、微距、客观、无疲劳、环境限制等。 4、机器视觉系统的基本构成:相机+镜头+光源+待测目标+电脑系统。 5、机器视觉应用分类:测量、检测、定位、识别 第二章 1、视野:图像采集设备所能够覆盖的范围,它可以是在监视器上可以见到的范围,也可以是设备所输出的数字图像所能覆盖的最大范围。 2、最大/最小工作距离:从物镜到被检测物的距离的范围,小于最小工作距离或大于最大工作距离系统均不能正确成像。 3、景深:在某个调焦位置上,景深内的物体都可以清晰成像。 4、几何畸变:由于镜头原因导致的图像不同位置上的放大倍率存在差异。主要包括径向畸变和切向畸变。 5、成像面:可以在镜头的像面上清晰成像的物方平面。 6、光圈与F值:光圈是在镜头内控制通光量的装置(用F值表示,如f1.2) 7、焦距:焦距是像方主面到像方焦点的距离。如16mm, 25mm 8、分辨率:镜头能够分辨一毫米内多少对直线,lp/mm是表征分辨率的最简单的指标。 9、镜头的调制传递函数MTF:能够同时表征系统重现物方空间的几何和灰度细节能力,是衡量成像系统性能的最佳方式。 10、光圈大通光能力大,景深小;光圈小通光能力小,景深大 11、传感器(把物理信号转变为电信号)的尺寸:图像传感器感光区域的面积大小 12、物理放大率:传感器感光面积与视野的比值,整个参数基本取决于镜头 13、数字相机的分辨率则直接取决与传感器上像素的数目。像素的长宽比对系统的标定有直接影响。 14、卷帘快门:多数CMOS使用,特征是逐行曝光,每一行的曝光时间不一致。 全局快门:CCD传感器使用,所有像素同时刻曝光。 15、图像传感器:是一个由N行及M列感光单元(CCD Pixel)组成的矩阵。 16、感光单元的基本工作原理:当光子撞击到硅原子上时,会产生自由电子,再将这些自由电子收集在一起形成信号。 17、CCD成象的“溢出”问题:当CCD象素接收到过多的光子,存储器中所收集的自由电子就会向周边的象素“溢出”,致使整个区域成象变亮。 18、模拟相机:价格低廉,使用简单。存在一个分辨率和帧频率的上限,而且对于传输过程中的噪声和损耗也较为敏感。 数字相机:分辨率高,价格昂贵,调试复杂。传输距离通常比模拟相机短。 20、图像采集卡是图像采集部分和处理部分的接口。图像经过采样、量化以后转换为数字图像并输入、存储到帧存储器的过程,叫做采集、数字化。 视频信号的量化处理是图像采集处理的重要组成部分。 21、图像采集基本原理:(1)视野或现场是相机及光学系统“看”到的真实世界的具体部分。图像传感芯片将光能转化为电能。(2)相机将此信息以模拟信号的格式输出至图像采集卡。(3)AD转换器将模拟信号转换成数字信号,每个象素独立地把光强以灰度值的形式表达。(4)把光强值存储到内存的矩阵数据结构中。 解决方案指导------匹配(Matching)(1章、2章、3章) 关于本手册 匹配是一种适合于在图像中查找和定位目标的方法。该解决方案指南引导您使用HALCON提供的各种匹配方法。 第7页第1节中介绍了可用的匹配方法,包括为特定应用选择特定方法的技巧。 第19页第2节讨论了一些适用于多种方法的通用主题。例如包括:选择合适的模板,速度提升的技巧和使用结果。 第57页第3节提供了一些关于个别的匹配方法的细节信息。 本解决方案指南中提供的HDevelop示例程序可以在目录%HALCONROOT%的指定子目录中找到。 目录 解决方案指导------匹配(Matching)(1章、2章、3章) (1) 第一章简介 (4) 1.1 怎样使用该手册? (4) 1.2 匹配是什么? (4) 1.3 如何进行一般的匹配? (5) 1.4 可用的方法有哪些? (5) 1.5哪种方法适用于哪种情况? (6) 1.5.1 匹配方法:2D与3D的比较 (6) 1.5.2 3D空间中3D对象和2D对象的决策 (7) 1.5.3 正交成像2D对象的第一个决策 (9) 1.5.4 基于形状的匹配VS基于相关性的匹配 (10) 1.5.5匹配方法的快速指南 (11) 第二章总论 (13) 2.1 准备模板 (14) 2.1.1 将参考图像简化为模板图像 (14) 2.1.2 感兴趣区域的影响 (15) 2.1.2.1参照点 (15) 2.1.3 合成模型作为模板图像的替代品 (17) 2.2 模板再使用 (22) 2.3加快搜索速度 (23) 2.3.1限制搜索空间 (23) 2.3.2关于二次抽样 (24) 2.4 使用匹配结果 (26) 2.4.1 单个匹配方法的结果 (26) 2.4.2 关于转换 (28) 2.4.3 使用估计的二维位置和方向 (31) 2.4.4使用估计的二维尺度 (41) 2.4.5使用估计的二维单应矩阵 (43) 2.4.6使用估计的三维姿态 (45) 2.4.7关于分数 (47) 第三章单个方法 (48) 3.1 基于灰度的匹配 (48) 3.2 基于相关性的匹配 (49) 3.2.1 一个例程 (49) 3.2.2选择模型ROI (51) 3.2.3建立合适的NCC模型 (51) 3.2.4优化搜索过程 (53) 3.3 基于形状的匹配 (54) 3.3.1 一个例子 (55)机器视觉实验指导书
图像处理与机器视觉
第二章 基于机器视觉的自动检测系统机械部分设计
机器视觉论文:基于机器视觉的弹体轮廓在线检测技术的研究
机器视觉操作手册
机器视觉测量技术2.
智能机器视觉系统
机器视觉基本构成
机器视觉复习资料
halcon解决方案指导--模板匹配Matching(第一章、第二章、第三章)