基于CAN总线的电动汽车控制系统设计

基于CAN总线的电动汽车控制系统设计本文介绍将CAN总线技术应用到电动汽车控制系统,并采用通用扩展单元解决了电动汽车电控系统的电路设计复杂性的问题,优化了组合各电控单元信息以实现充分信息共享,从而达到提高电动汽车控制系统性能的目的。
一、前言
CAN总线是德国BOSCH公司在20世纪80年代初为解决汽车中众多的控制与测试仪器之间的数据交换而开发的一种通信协议。由于CAN总线具有突出的可靠性、实时性和灵活性,因而得到了业界的广泛认同和运用,并在1993年正式成为国际标准和行业标准,被誉为“最有前途的现场总线”之一。以CAN为代表的总线技术在汽车上的应用不但减少了车身线束,也提高了汽车的可靠性。在国外现代轿车的设计中,CAN已经成为必须采用的技术,奔驰、宝马、大众、沃尔沃及雷诺等汽车都将CAN作为控制器联网的手段。我国目前CAN总线技术在汽车上的应用存在着很大的空白,在电动汽车上应用CAN总线技术研究尚处于起步阶段。
电动汽车融合了许多的电子控制系统,如电池管理系统、电机控制系统、驱动控制系统、再生制动系统及ABS系统等。电子设备的大量应用,必然导致车身布线增长且复杂、运行可靠性降低、线路上的功率损耗加大、故障维修难度增大。特别是电子控制单元的大量引入,为了提高信号的利用率,要求大批的数据信息能在不同的电子单元中共享,汽车综合控制系统中大量的控制信号也需要实时交换,传统线束已远远不能满足这种需求。将CAN总线动汽车控制系统,并采用通用扩展单元解决电动汽车电控系统的电路设计复杂性的问题,优化组合各电控单元信息以实现充分信息共享,达到提高电动汽车控制系统性能的目的。
二、CAN的发展背景
(一)CAN的起源
现代社会对汽车的要求不断提高,这些要求包括:极高的主动安全性和被动安全性;乘坐的舒适性;驾驶与使用的便捷和人性化;尤其是低排放和低油耗的要求等。
在汽车设计中运用微处理器及其电控技术是满足这些要求的最好方法,而且已经得到了广泛的运用。目前这些系统有:ABS(防抱系统)、EBD(制动力分配系统)、EMS(发动机管理系统)、多功能数字化仪表、主动悬架、导航系统、电子防盗系统、自动空调和自动C D 机等。
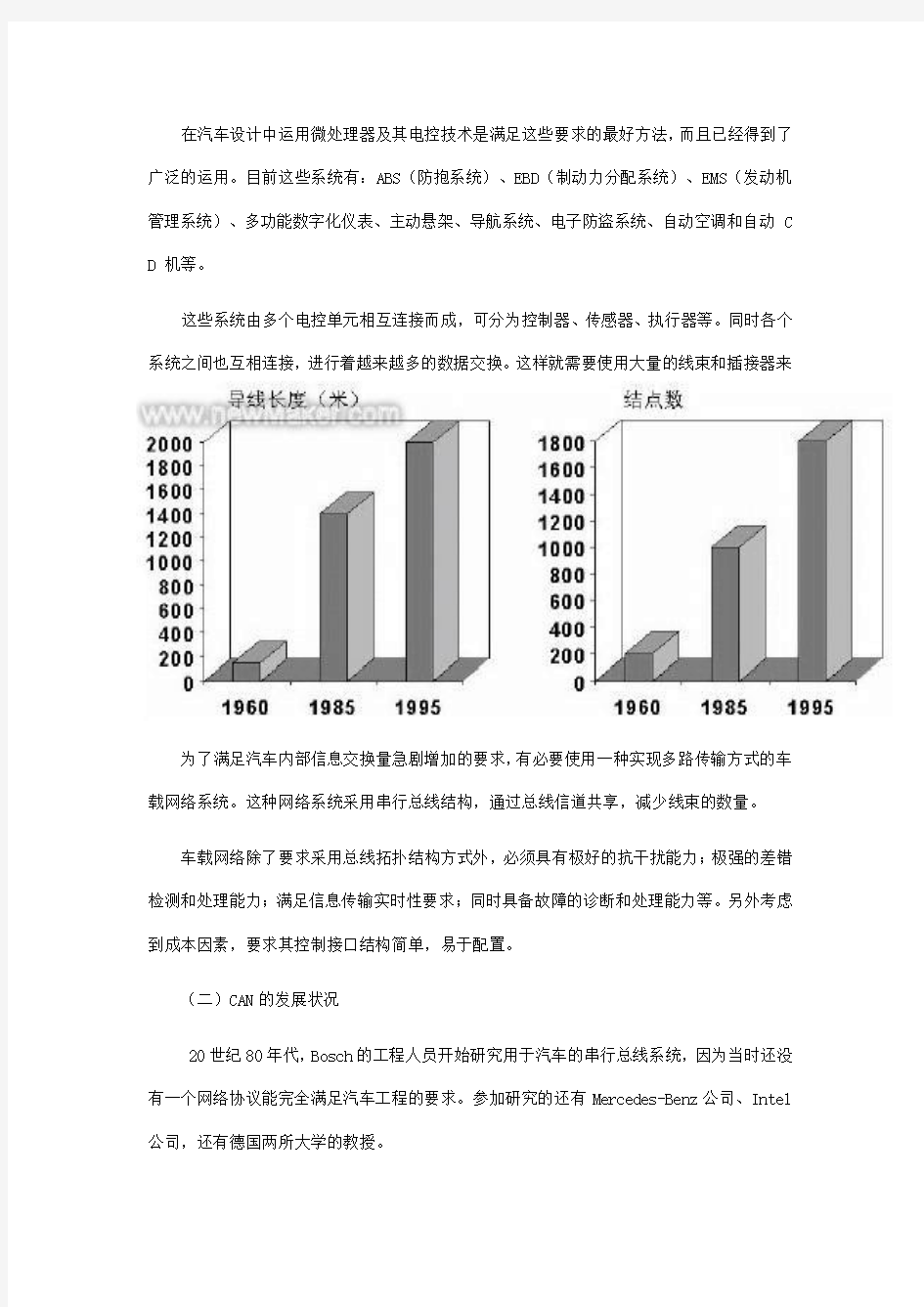
这些系统由多个电控单元相互连接而成,可分为控制器、传感器、执行器等。同时各个系统之间也互相连接,进行着越来越多的数据交换。这样就需要使用大量的线束和插接器来实现互连,进行它们之间的数据交换。随着汽车电子技术的不断发展,这种需求的增长是惊人的(如图)。
CAN属于现场总线范畴,是一种有效支持分布式控制或实时控制的串行通信网络。CAN 总线在工业控制领域广泛应用得益于其自身的技术特点。
由于线束和插接器的数量不断增加,整车电子系统的复杂程度愈来愈高,其可靠性将难以保证,故障率会提高,维修会更加困难。
为了满足汽车内部信息交换量急剧增加的要求,有必要使用一种实现多路传输方式的车载网络系统。这种网络系统采用串行总线结构,通过总线信道共享,减少线束的数量。
车载网络除了要求采用总线拓扑结构方式外,必须具有极好的抗干扰能力;极强的差错检测和处理能力;满足信息传输实时性要求;同时具备故障的诊断和处理能力等。另外考虑到成本因素,要求其控制接口结构简单,易于配置。
(二)CAN的发展状况
20世纪80年代,Bosch的工程人员开始研究用于汽车的串行总线系统,因为当时还没有一个网络协议能完全满足汽车工程的要求。参加研究的还有Mercedes-Benz公司、Intel 公司,还有德国两所大学的教授。
1986年, Bosch在SAE(汽车工程人员协会)大会上提出了CAN
1987年,INTEL就推出了第一片CAN控制芯片—82526;随后Philips半导体推出了82C200。1993年,CAN的国际标准ISO11898公布
从此CAN 协议被广泛的用于各类自动化控制领域。
1994年开始有了国际CAN学术年会(ICC)。
1994年美国汽车工程师协会以CAN为基础制定了SAEJ1939标准,用于卡车和巴士控制和通信网络。
到今天,几乎每一辆欧洲生产的轿车上都有CAN;高级客车上有两套CAN,通过网关互联;1999年一年就有近6千万个CAN控制器投入使用;2000年销售1亿多CAN的芯片;2001年用在汽车上的CAN节点数目超过1亿个。
但是轿车上基于CAN的控制网络至今仍是各大公司自成系统,没有一个统一标准。
基于CAN的应用层协议应用较通用的有两种:DeviceNet(适合于工厂底层自动化)和 CA Nopen(适合于机械控制的嵌入式应用)。
任何组织或个人都可以从DeviceNet供货商协会(ODVA)获得DeviceNet规范。购买者将得到无限制的、真正免费的开发DeviceNet产品的授权。
DviceNet自2002年被确立为中国国家标准以来,已在冶金、电力、水处理、乳品饮料、烟草、水泥、石化、矿山等各个行业得到成功应用,其低成本和高可靠性已经得到广泛认同。
三、CAN的工作原理及特点
(一)CAN的工作原理
当CAN 总线上的一个节点(站)发送数据时,它以报文形式广播给网络中所有节点。
每组报文开头的11位字符为标识符(CAN2.0A),定义了报文的优先级,这种报文格式称为面向内容的编址方案。
当一个节点要向其它节点发送数据时,该节点的CPU 将要发送的数据和自己的标识符传送给本节点的CAN芯片,并处于准备状态;当它收到总线分配时,转为发送报文状态。
CAN 芯片将数据根据协议组织成一定的报文格式发出,这时,网上的其它节点处于接收状态。
每个处于接收状态的节点对接收到的报文进行检测,判断这些报文是否是发给自己的,以确定是否接收它。
由于CAN 总线是一种面向内容的编址方案,因此很容易建立高水准的控制系统并灵活地进行配置。我们可以很容易地在CAN 总线中加进一些新节点而无需在硬件或软件上进行修改。
当所提供的新节点是纯数据接收设备时,数据传输协议不要求独立的部分有物理目的地址。它允许分布过程同步化,即总线上控制器需要测量数据时,可由网上获得,而无须每个控制器都有自己独立的传感器。
(二)CAN总线特点
CAN总线是一种串行数据通信协议,其通信接口中集成了CAN协议的物理层和数据链路层功能,可完成对通信数据的成帧处理,包括位填充、数据块编码、循环冗余检验、优先级判别等项工作。
CAN总线特点如下:
(1)可以多种方式工作,网络上任意一个节点均可以在任意时刻主动地向网络上的其他节点发送信息,而不分主从,通信方式灵活。
(2)网络上的节点(信息)可分成不同的优先级,可以满足不同的实时要求。
(3)采用非破坏性位仲裁总线结构机制,当两个节点同时向网络上传送信息时,优先级低的节点主动停止数据发送,而优先级高的节点可不受影响地继续传输数据。
(4)可以点对点、一点对多点(成组)及全局广播几种传送方式接收数据。
(5)直接通信距离最远可达10km(速率5Kbps以下)。
(6)通信速率最高可达1MB/s(此时距离最长40m)。
(7)节点数实际可达110个。
(8)采用短帧结构,每一帧的有效字节数为8个。
(9)每帧信息都有CRC校验及其他检错措施,数据出错率极低。
(10)通信介质可采用双绞线,同轴电缆和光导纤维,一般采用廉价的双绞线即可,无特殊要求。
(11)节点在错误严重的情况下,具有自动关闭总线的功能,切断它与总线的联系,以使总线上的其他操作不受影响。
四、CAN协议规范
CAN为串行通讯协议,能有效地支持具有很高安全等级的分布实时控制。CAN的应用范围很广,从高速的网络到低价位的多路接线都可以使用CAN。在汽车电子行业里,使用CAN 连接发动机控制单元、传感器、防刹车系统、等等,其传输速度可达1Mbit/s。同时,可以将CAN安装在卡车本体的电子控制系统里,诸如车灯组、电气车窗等等,用以代替接线配线装置。
技术规范的目的是为了在任何两个CAN仪器之间建立兼容性。可是,兼容性有不同的方面,比如电气特性和数据转换的解释。为了达到设计透明度以及实现灵活性,根据ISO/OSI 参考模型,CAN 2.0规范细分为以下不同的层次:数据链路层和物理层(如图4.5所示)。
在以前版本的CAN 规范中,数据链路层的LLC 子层和MAC 子层的服务及功能分别被解释为“对象层”和“传输层”。
逻辑链路控制子层(LLC)的作用范围如下:
?为远程数据请求以及数据传输提供服务。
?确定由实际要使用的LLC 子层接收哪一个报文。
?为恢复管理和过载通知提供手段。
MAC 子层的作用主要是传送规则,也就是控制帧结构、执行仲裁、错误检测、出错标定、故障界定。位定时的一些普通功能也可以看作是MAC 子层的一部分。
位编码/解码 位定时 同步 驱动器接收器特性
逻辑链路子层LLC
接收滤波
超载通知
恢复管理 介质访问控制子层MAC 数据包装/解包 帧编码 介质访问管理 错误监测 出错标定 应答
串并转换
数
据
链路
层 物理
层 故障界定 总线故障管理 监控器
CAN 协议分层结构和功能 1.CAN 规范中的对应ISO/OSI 参考模型的网络层
物理层的作用是在不同节点之间根据所有的电气属性进行位的实际传输。
五、CAN总线在电动汽车上的应用
CAN总线应用于电动汽车上具有以下优点。
减少各功能模块所需的线束数量和体积。
减少整车质量并降低汽车成本,具有较高的数据传输可靠性和安装便捷性,扩展了汽车功能。
一些数据如车速、电机转速和SOC等能够在总线上共享,因此去除了冗余的传感器,使传感器信号线减至最少,控制单元可做到高速数据传输。
可以通过增加节点来扩展功能,如果数据扩展增加新的信息,只需升级软件即可。
实时监测并纠正由电磁干扰引起的传输错误,并在检测到故障后存储故障码。
目前存在的多种汽车网络标准,其侧重的功能有所不同,为方便研究和设计应用,SAE 车辆网络委员会将汽车数据传输网划分为A、B、C3类。
A类面向传感器/执行器控制的低速网络,数据传输位速率通常只有1~10kb/s。主要应用于电动门窗、座椅调节和灯光照明等控制。
B类面向独立模块间数据共享的中速网络,位速率一般为10~100kb/s。主要应用于电子车辆信息中心、故障诊断、仪表显示和安全气囊等系统,以减少冗余的传感器和其它电子部件。
C类面向高速、实时闭环控制的多路传输网,最高位速率可达1Mb/s,主要用于悬架控制、牵引控制、先进发动机控制和ABS等系统,以简化分布式控制和进一步减少车身线束。到目前为止,满足C类网要求的汽车控制局域网只有CAN协议。
六、方案设计
(一)系统原理图
图1为电动汽车CAN总线控制系统原理图。
图1 系统原理图
该系统主要由驱动控制模块、再生制动控制模块、电机控制模块、能量管理模块、电池控制模块、仪表显示模块及故障诊断模块等组成。通过CAN实现各个控制模块间的信息通信。除了指令的发送和接收外,汽车的一些基本状态信息(如电机转速、电池荷电状态、车速等)是大部分控制单元必须获取的数据,控制单元采用广播方式向总线发送数据。
如果在同一时刻所有控制单元都向总线发送数据,将发生总线上的数据冲突,因此,C AN总线协议提出了用标识符识别数据优先权的总线仲裁。表1给出了电动汽车电控单元接收及发送的数据类型及其它单元对这些信息共享的程序。
表1 电动汽车电控单元接收及发送的数据类型
ABS ASR 空调系统
1 电池荷电
状态
T R R R
2 电机转速R T R R R
3 车速R R R T R
4 R R T R
5 R R R R T
6 R R T R R R
7 电机温度R T
8 电池温度R T
9 驾驶室内
温度
R R T
注:T-发送,R-接收
(二)模块单元电路框图
在对高速CAN上的节点进行硬件设计时采用通用扩展单元(UDU)。这样只需通过改变软件来实现各节点的不同功能,从而简化了硬件系统设计。
通用扩展单元结构如图2所示。
图2 通用扩展单元在通用扩展单元中选用AT89C52作微控制器它是一个低电压、高性能的CMOS8位单片机,片内含8kB的可反复擦写的只读程序存储器(EPROM)和256B的随机存取数据存储器(RAM),兼容标准MCS251指令系统,片内置通用8位中央处理器和Flash存储单元,可适用于许多较复杂系统的控制应用场合。
CAN控制器采用Philips公司生产的SJA1000,它是应用于汽车和一般工业环境的独立CAN控制器,具有完成CAN高性能通信协议所要求的全部必要特性,具有简单总线连接的S JA1000可完成物理层和数据链路层的所有功能。它可以存储一条将在CAN总线上发送或接收的完整报文,另外具有64字节扩展接收缓冲区REFIFO,接收缓存更大,在微控制器处理一个报文的同时可以继续接收其它发来的报文。
总线收发器采用PCA82C250,它提供协议控制器和物理传输线路直接的接口,可以用高达1Mb/s的速率在2条有差动电压的总线电缆上传输数据。
最多挂接节点数可达110个。采用PCA82C250可以增大通信距离,提高系统瞬间抗干扰能力,降低射频干扰。PCA82C250和SJA1000共同组成CAN总线的控制和接口电路。
(三)电池管理控制系统设计
蓄电池对电动汽车而言是影响整车性能的一个关键因素,它对续驶里程、加速性能和最大爬坡度等性能都会产生直接影响。电池控制系统主要是监控电池的工作状态(电池电压、电流和温度),管理电池的工作情况(避免出现过放电、过充、过热和单体电池之间电压严重不平衡现象)以便最大限度地利用电池的存储能力和循环寿命。其结构如图3。
图3 电池管理控制单元结构图
该系统主要实现以下功能。
对主辅电池进行实时监控通过UDU采集主辅电池充放电过程中的电池电压、电流和电池温度,来监控电池的工作状况并进行故障诊断。
UDU接收来自总线的汽车行驶状态数据根据汽车动力需求实时调整电动机转速及功率
输出;当收到制动信息时,控制单元调控逆变器和电动机的动作,启动再生制动系统回收制动能量。
预测电池剩余电量和相应的剩余行驶里程控制单元把采集到的充放电电流参数采用相应的算法预测剩余电量。同时利用从总线上接收的车速信息估算剩余行驶里程,并把估算结果通过总线发送到仪表显示单元。
(四)系统可靠性设计
由于汽车内温度变化范围大(-45~100℃),电磁干扰和其它电子噪声强,环境恶劣,要保证系统在车内运行的可靠性,就必须提高网络结构自身的容错能力和抗干扰能力。
在设计时采用软硬件结合的方法进行抗干扰。
硬件方面采用电磁兼容设计,重点处理静电场、磁场和传输线路及电路引入的干扰,采用滤波、去耦、隔离、屏蔽和接地等方式,加入电源电压检测、看门狗等电路。具体措施如下。
传输线采用屏蔽双绞线。
用看门狗定时器进行超时复位。
在CAN控制器SJA1000和CAN收发器PCA82C250之间增加了由高速隔离器件6N137构成的光电隔离电路,电源也采用微型DC/DC模块来进行隔离。
将PCA82C250的CANH和CANL分别通过一个5Ω的电阻与CAN总线相连,可起到限流作用,保护PCA82C250免受过流冲击,CANH和CANL分别并联一个30pF的电容接地,也可过滤总线上的高频干扰。
传输介质的损坏或总线驱动器的损坏等都会破坏CAN的可靠通信,这些故障如不能自动检测并采取相应措施排除,将使系统部分甚至完全失去通信能力。解决这一问题的有效途径是采用冗余通信控制,从而保证通信系统主要功能正常运行,以此提高系统的可靠性。
软件方面采用比错和容错等技术,对信号进行软件滤波,设计上电复位抗干扰程序,运用实效保险等技术设计抗瞬间干扰程序等。
七、CAN的可靠性
为防止汽车在使用寿命期内由于数据交换错误而对司机造成危险,汽车的安全系统要求数据传输具有其较高的安全性。如果数据传输的可靠性足够,或者残留下来的数据错误足够低的话,这一目标不能实现。从总线系统数据的角度看,可靠性可以理解为,对传输过程产生的数据错误的识别能力。
参与数据错误的概率可以通过数据传输可靠性的统计测量获得,它描述了传送数据被破坏和这破环不能被探测出来的概率。残余数据错误概率必须非常小,使其在系统整个生命周期内,按平均统计时几乎检测不到。计算残余错误概率要求能够对数据错误进行分类,并且数据传输路径可由一模型描述。如果要确定CAN的残余错误概率,我们可将残留错误的概率作为具有80-90位的报文传送时位错误概率的函数,并假定这个系统中有5-10个站,并且错误概率为1/1000,那么最大位错概率为10-13数量级。例如CAN 网络的数据传输率最
大为1Mbps,如果数据传输能力仅使用50%,那么对于一个工作寿命4000小时,平均报文长度为80位的系统,所传输的数据总量为9*101。.在系统运行寿命期内,不可检测的传输错误的统计小于10-2量级。换句话说,一个系统按每年365天,每天工作8小时,每秒错误率为0.7计算,那么按统计平均,每1000年才会发生一个不可检测的结果。
八、典型CAN总线器件及应用
SJA1000 CAN控制器
1.CAN控制器的作用
(1)完成CAN规范所规定的物理层和数据链路层大部分功能
(2)有微处理器接口,易于连接单片机
(3)结构分两种类型,独立IC或与单片机集成在一起,SJA1000属于前者
(4)属于后者的有:PHILIPS的87C591、LPC2119,西门子的C167C,INTEL的80C196CA (5)都遵循CAN2.0规范,掌握其中一种就可触类旁通
2SJA1000 CAN控制器
SJA1000是一个独立的CAN控制器,它在汽车和普通的工业应用上有先进的特征,适合于多种应用特别在系统优化诊断和维护方面非常重要。
SJA1000独立的CAN控制器有2个不同的操作模式:
BasicCAN模式:和PCA82C200兼容。BasicCAN模式是上电后默认的操作模式,因此用PCA82C200开发的已有硬件和软件,可以直接在SJA1000上使用而不用作任何修改。
PeliCAN模式:是新的操作模式。它能够处理所有CAN2.0B规范的帧类型。而且它还提供一些增强功能,使SJA1000能应用于更宽的领域。
工作模式通过时钟分频寄存器中的CAN模式位来选择,复位时默认模式是Basic CAN模式。
3CAN控制器SJA1000在系统中的位置
4SJA1000控制器的结构
CAN核心模块:根据CAN规范控制CAN帧的发送和接收。
接口管理逻辑:用于连接外部主控制器。SJA1000通过复用的地址/数据总线,与主控制器联系。
发送缓冲器:用于存储一个完整的扩展的或标准的报文。当主控制器初始发送时,接口管理逻辑会使CAN核心模块从发送缓冲器读CAN报文。
验收滤波器:通过这个可编程的滤波器能确定主控制器要接收哪些报文。
接收FIFO:用于存储所有收到的报文,储存报文的多少由工作模式决定,最多能存储32个报文。
5SJA1000发送缓冲器的布局
标准帧格式扩展帧格式
CAN地
内容内容
址
16 TX帧信息TX帧信息
17 TX标识码1 TX标识码1
18 TX标识码2 TX标识码2
19 TX数据字节1 TX标识码3
20 TX数据字节2 TX标识码4
21 TX数据字节3 TX数据字节1
22 TX数据字节4 TX数据字节2
23 TX数据字节5 TX数据字节3
24 TX数据字节6 TX数据字节4
25 TX数据字节7 TX数据字节5
26 TX数据字节8 TX数据字节6
27 未用TX数据字节7
28 未用 TX 数据字节8
6SJA1000接收缓冲器(FIFO)的布局
7SJA1000控制器功能框图
地址 内容(标准帧) 内容(扩展帧) 16 RX 帧信息 RX 帧信息 17 RX 标识码1 RX 标识码1 18 RX 标识码2 RX 标识码2 19 RX 数据字节1 RX 标识码3 20 RX 数据字节2 RX 标识码4 21 RX 数据字节3 RX 数据字节1 22 RX 数据字节4 RX 数据字节2 23 RX 数据字节5 RX 数据字节3 24 RX 数据字节6 RX 数据字节4 25 RX 数据字节7 RX 数据字节5 26 RX 数据字节8 RX 数据字节6 27 RX 数据字节7 28 RX 数据字节8
7SJA1000控制器功能框图
(1) 接口管理逻辑(IML)接口管理逻辑解释来自CPU 的命令,控制CAN 寄存器的寻址,向主控制器提供中断信息和状态信息。
(2 ) 发送缓冲器(TXB)发送缓冲器是CPU 和BSP(位流处理器)之间的接口,能够存储发送到CAN网络上的完整信息,缓冲器长13个字节,由CPU 写入、BSP 读出。
(3 )接收缓冲器(RXB,RXFIFO)接收缓冲器是验收滤波器和CPU之间的接口,用来储存从CAN 总线上接收的信息。
(4 ) 验收滤波器(ACF)验收滤波器把它其中的数据和接收的识别码的内容相比较,以决定是否接收信息。
(5 )位流处理器(BSP)位流处理器是一个在发送缓冲器、RXFIFO 和CAN 总线之间,控制数据流的程序装置,它还在CAN 总线上执行错误检测、仲裁填充和错误处理。
(6 )位时序逻辑(BTL)位时序逻辑监视串口的CAN总线和处理与总线有关的位时序。它在信息开头的总线传输时同步CAN 总线位流(硬同步),接收信息时再次同步下一次传送(软同步)。BTL 还提供了可编程的间段来补偿传播延迟时间、相位转换和定义采样点和一位时间内的采样次数。
(7 )错误管理逻辑(EML)EML负责传送层模块的错误管制。它接收BSP 的出错报告。通知BSP 和IML 进行错误统计。
8CAN控制器SJA1000主要特性
28引脚,可与INTEL系列或MOTOROLA系列微处理器接口
支持CAN2.0A和CAN2.0B规范
支持11位和29位标识符
64字节先进先出(FIFO)接收缓冲器
通信速率最高1Mbps
CAN输出驱动器可配置
工作温度-40~125℃
扩展的报文验收滤波器,可置成单滤波或双滤波模式
九、结束语
介绍CAN总线的特点及在电动汽车上的应用,设计了基于CAN总线的电动汽车整车控制系统的节点设置,并引入通用扩展单元简化了系统硬件设计,对影响电动汽车性能的电池管理控制单元进行了优化设计。该系统具有结构紧凑、可靠性高、功能完善和成本低的优点,能够较好地满足电动汽车的工作要求
Abstract
According to the field bus is total line of communication and control the technique is an one of the main development technique within automatic control realm of current industries, it to have the information digitize, control scatter etc. International and advanced level that advantage, at auto control the realm inside application increasingly extensive. The total line technique of the spot is already to two metalcores carry an electric cable control 10 control technique that Km distances expansion stage, but on our country of the big field agriculture irrigate to control the system application, according to the total line method return very weak. Current and big field the auto that irrigate control many adoptions of systems to directly import, and the technique is advanced, function stability, but the cost is expensive, very rare expand application to the big area; Therefore, design that draw lessons from forerunner thought, the development have the right of independence knowledge property of according to the spot is total to line irrigate to control the system and with it the kit's central controller control the unit with terminal, and lower to throw in the cost, and increase the equipments's dependable, easy operability, can promote to higher grade the sex with standardize to wait the main technique index sign, and match the agriculture modernization to development automate technique need.
According to the CAN bus is total to line irrigate the core of the automatic
control system is a development to irrigate controller, and irrigate the controller should have the dependable, easy operability, and can promote to higher grade the sex with internationalize to wait the characteristics
The valve door that this design base on CAN bus is total the line supervise and control the system, and have to use the line little, solid hour good, flat-out quick etc. Advantage, and adoption the touch hold operation, safety dependable easily operate. This system is now and already at 111 regiment 1 connected to start experiment, obtain the anticipant result. The technique function is strong, and the cost is significant to lower, and is an agriculture to modernize the alignment the information the essential to have's step. can break the large unit the automation to irrigate to control the technique the main counting on the situation that import at the same time, and the demonstrate expand to have the large unit independence knowledge property the power's management software.
Keywords:CAN bus RTU automatic control irrigation choke supervision
电动汽车驱动电机匹配设计.
电动汽车驱动电机匹配设计 目录 1 概述 (1) 2 世界电动汽车发展史 (2) 3 电驱动系统的基本要求 (5) 3.1电驱动系统结构 (5) 3.2电机的基本性能要求 (6) 4 电动汽车基本参数参数确定 (7) 4.1电动汽车基本参数要求 (7) 4.2 动力性指标 (7) 5 电机参数设计 (7) 5.1 以最高车速确定电机额定功率 (7) 5.2 根据要求车速的爬坡度计算 (8) 5.3 根据最大爬坡度确定电机的额定功率 (9) 5.4 根据额定功率来确定电机的最大功率 (9) 5.5 电机额定转速和转速的选择 (9) 6 传动系最大传动比的设计 (10) 7 电机的种类与性能分析 (11) 7.1 直流电动机 (11) 7.2交流三相感应电动机 (11)
7.3 永磁无刷直流电动机 (11) 7.4 开关磁阻电动机 (12) 8 电机的选择 (13) 9 电机其他选择与设计 (15) 9.1 电机形状位置设计 (15) 9.2 电机冷却设计 (15) 10 总结与展望 (17) 10.1 总结 (17) 10.2 问题与展望 (17) 致谢 (18) 参考文献 (19) 1.概述 汽车工业在促进世界经济飞速发展和给人们生活提供便利的同时,又展现出了其双刃剑的另一面,它将能源与环境问题推到了日益尴尬的处境。“能源、环境和安全”成为了21世纪世界汽车工业发展的3大主题。其中,能源与环境问题作为全球面临的重大挑战和制约汽车工业可持续发展的症结所在,更成为重中之重。电动汽车使用电能作为动力能源,而电能具有来源广、清洁无污染等特点。电动汽车被公认为21世纪重要的交通工具。 电动汽车是指汽车行驶的动力全部或部分来自电机驱动系统的汽车,它主要以动力电池组为车载能量源,是涉及机械、电子、电力、微机控制等多学科的高科技技术产品。按照汽车行驶动力来源的不同,一般将电动汽车划分为纯电动汽车(Pure Electric Vehicle,PEV)、混合动力电动汽车(Hybrid Electric Vehicle,HEV)、插电式混合动力电动汽车(Plug-in Hybrid Electric Vehicle,PHEV)和燃料电池电动汽车(Fuel Cell Electric Vehicle,FCEV)4种基本类型。 自1881年法国电气工程师Gustave Trouve制造出首辆电动汽车开始,电动汽车经历了曲折起伏的几个发展阶段,其中的决定因素就是动力电池技术和人们
纯电动汽车制动系统计算方案
纯电动汽车制动系统计算方案 1 2020年4月19日
文档仅供参考 目录 前言............................................................................ 错误!未定义书签。 一、制动法规基本要求 ............................................ 错误!未定义书签。 二、整车基本参数及样车制动系统主要参数 ......... 错误!未定义书签。 2.1整车基本参数................................................ 错误!未定义书签。 2.2样车制动系统主要参数 ................................ 错误!未定义书签。 三、前、后制动器制动力分配 ............................. 错误!未定义书签。 3.1地面对前、后车轮的法向反作用力 ............ 错误!未定义书签。 3.2理想前后制动力分配曲线及 曲线 ............. 错误!未定义书签。 3.2.1理想前后制动力分配 .......................... 错误!未定义书签。 3.2.2实际制动器制动力分配系数............... 错误!未定义书签。 五、利用附着系数与制动强度法规验算 ................. 错误!未定义书签。 六、制动距离的校核 ................................................ 错误!未定义书签。 七、真空助力器主要技术参数................................. 错误!未定义书签。 八、真空助力器失效时整车制动性能 ..................... 错误!未定义书签。 九、制动踏板力的校核 ............................................ 错误!未定义书签。 十、制动主缸行程校核 ............................................ 错误!未定义书签。十一、驻车制动校核 ................................................ 错误!未定义书签。 1、极限倾角 ....................................................... 错误!未定义书签。 2、制动器的操纵力校核.................................... 错误!未定义书签。 I 2020年4月19日
纯电动汽车制动系统计算方案
目录 前言 (1) 一、制动法规基本要求 (1) 二、整车基本参数及样车制动系统主要参数 (2) 2.1整车基本参数 (2) 2.2样车制动系统主要参数 (2) 三、前、后制动器制动力分配 (3) 3.1地面对前、后车轮的法向反作用力 (3) 3.2理想前后制动力分配曲线及 曲线 (4) 3.2.1理想前后制动力分配 (4) 3.2.2实际制动器制动力分配系数 (4) 五、利用附着系数与制动强度法规验算 (9) 六、制动距离的校核 (11) 七、真空助力器主要技术参数 (12) 八、真空助力器失效时整车制动性能 (12) 九、制动踏板力的校核 (14) 十、制动主缸行程校核 (16) 十一、驻车制动校核 (17) 1、极限倾角 (17) 2、制动器的操纵力校核 (18)
前言 BM3车型的行车制动系统采用液压真空助力结构。前制动器为通风盘式制动器,后制动器有盘式制动器和鼓式制动器两种,采用吊挂式制动踏板,带真空助力器,制动管路为双回路对角线(X型)布置,安装ABS系统。 驻车制动系统为后盘中鼓式制动器和后鼓式制动器两种,采用手动机械拉线式操纵机构。 一、制动法规基本要求 1、GB21670《乘用车制动系统技术要求及试验方法》 2、GB12676《汽车制动系统结构、性能和试验方法》 3、GB13594《机动车和挂车防抱制动性能和试验方法》 4、GB7258《机动车运行安全技术条件》 400N
二、整车基本参数及样车制动系统主要参数 2.1整车基本参数 2.2样车制动系统主要参数
本车型要求安装ABS 三、 前、后制动器制动力分配 3.1地面对前、后车轮的法向反作用力 在分析前、后轮制动器制动力分配比前,首先了解地面作用于前后车轮的法向反作用力(图1)。 由图1,对后轮接地点取力矩得: 1z g du F L Gb m h dt =+……………………(1) 式中:1z F —地面对前轮的法向反作用力,N ; G —汽车重力,N ; b —汽车质心至后轴中心线的水平距离,m ; m —汽车质量,kg ; g h —汽车质心高度,m ; L —轴距,m ; du dt —汽车减速度2/m s 。 对前轮接地点取力矩,得: 2z du F L Ga m dt =-……………………(2) 式中:2z F —地面对后轮的法向反作用力,N ; a —汽车质心至前轴中心线的距离,m 。 12()()z g z g G F b h L G F a h L ???=+??? ?=-?? (3)
详解电动汽车传动系统原理、传动方式及拓扑构架设计
详解电动汽车传动系统原理、传动方式及拓扑构架设计 随着现代汽车电子技术的发展,新能源汽车、电动汽车的出现无疑给整个行业注入了一股新鲜而且充满挑战性的血液。凭借可以减少很多废弃物、有害气体的排放,对整个社会的生活环境都有很大的改善效果,得到社会及国家的高度的重视,具有很好的发展前景。下面我们就来从电动车的结构引入到电动汽车传动系统,并分析它的工作原理、传动方式、优势等,并简单的列举一些成功的应用案例。电动汽车和普通的汽车不同,它是用车载电源提供行驶的动力,用电机来驱动车轮的运动,而不是用点火装置来提供向前运动的力。我们知道,电动汽车主要是由电力驱动及控制系统、驱动力传动系统、工作装置等各个部分组成。它的工作原理是蓄电池中提供恒定的电流输出,这些恒定的电路通过电力调节器进行一次转换成可以驱动电动机的合适的电流和电压,从而可以驱动整个动力传动系统的正常运行,经过他们之间相互的作用最终给汽车提供可以运行的动力汽车可以正常的行驶。由此可见,电动汽车传动系统的有效性和安全性直接影响着整个系统的运行。电动汽车传动系统原理是直接将电动机的驱动转矩传给汽车的驱动轴。汽车传动轴在采用电动轮驱动时,由于它是靠车载电源提供动力源驱动电动机因而可以实现带负载启动,无需离合器;也正是因为是车载电源可以提供恒定的电流,中间会有电路控制的环境来实现驱动电机的方向和转速的控制,所以不需要倒档和差速器。若采用无级调速,就可以实现自动控制,无需变速器。电动汽车传动系统的传动方式主要有三种:(1)电机+传动轴+后桥(2)电机+变速箱+后桥(3)电机+磁力变矩器+后桥以目前的变速箱技术成熟度而言,除了传统车的变速箱外还没有一款真正成熟的适用于电动汽车的产品,最可靠和适用的传动方式还是电机+传动轴+后桥的直驱方案。当然在具体的设计时,我们需要更具实际情况来设计,包括电机的位置、电源的位置、驱动负载的能力、行驶速度要求、稳定性等这些都需要综合的来考虑。了解车辆效率损失分配即从发动机输出的功率消耗在不同汽车部件上的量及比例。这对改善车辆总体的传动效能非常有用,以达到适当配置资源,改善性能的目的。各种损失,使用安装在车辆适当位置的传感器进行测定。电动汽车传动系统拓扑构架设计汽车动力传动系统采用传统的内燃机和电动机作为动力能源,通过混合使用热能和电能两套系统开动汽车。在低速小功率运行时可以关闭发动机,采用电动机驱动;而高速行驶时用内燃机驱动;通过发动机和电动机的协同工作模式,将车辆在制动时产生的能量转化为电能,并积蓄起来成为新的驱动力量.从而在不同工况下都能达到高效率。一般上有串联式、并联式、混联式和复合式4种布置形式。(1)串联式—下图中采用的电力电子装置只有电机控制器,电池和辅助动力装置都直接并接在电机控制器的入口,属于串联式,车辆的驱动力只来源于电动机。 (2)并联式—下图中是典型的并联式动力系统结构,通常在电池和电机控制器之间安装了一个DC/DC变换器,电池的端电压通过DC/DC变换器的升压或降压来与系统直流母线的电压等级进行匹配。车辆的驱动力由电动机及发动机同时或单独供给。(3)混联式----采用四轮驱动、前后轮分别与不同的驱动系相连,后轮驱动有发动机、后置电机、发电机、变速器等组成,前轮驱动由前置电机、发电机组成。由于它使用不同的驱动方式,所以整个电动汽车传动系统既分离又相关联,可以更好的控制。下图就是一个简单的混联式的拓扑构架。同时具有串联式、并联式驱动方式。(4)复合式---改结构主要集中于双轴混合动力系统中,前轴和后轴独立驱动,前轮和后轮之间没有任何驱动抽或转电力主动型的设计,这种独立的驱动,让传动系统各个部件在运行过程中相互独立控制,因此可以有更好的传输能力。要让整个系统可以更好的运行,除了结构设计方面需要注意之外,还有一个就是电动汽车传动系统的参数设计也需要合理的匹配,这些参数对传动结构的性能影响也是很大的。这一方面的知识,小编在这边文章就不具体介绍了。总结能源问题和环境污染问题是现在社会日益突出的问题,深受国家的重视。因此寻找新能源汽车可以减少废气排放,让能源可以更好的利用在汽车电子设计行业是当务之急。电动汽车正是因为具有上面
纯电动汽车制动能量回收技术
纯电动汽车制动能量回收技术 电动汽车制动能量回收技术是利用汽车在踩动刹车进行减速时将制动效能转变为电能储存并回收到电池当中,摩擦能量没有被浪费掉而是变相扩充了电池的容量,增加了纯电动汽车的续航里程,并且减少了刹车系统耗材的磨损。 电动汽车在“新能源”话题备受瞩目的今日已经不是个陌生词语,但是电动汽车的历史比大多数人想像得要长很多。1896年还推出了为电动车换电的服务,也就是我们今天所说的“充电桩”的雏形[仇建华,张珍,电动汽车制动能量回收方式设计[J].上海汽 车.2012,12.];在十九世纪末二十世纪初的交通大变革中,电动汽车作为一种新型事物快速成长但又迅速陨落。有社会环境的影响也有自身条件的限制。 目前常见的纯电动汽车,其动力电池组、电池变换器和电动机之间为电气连接,电动机、减速器和车轮之间为机械连接。 纯电动汽车制动能量回收技术研究背景 ?动车从登上历史的舞台开始,续航性能如何提升一直是人们争议很大的点。从根本上来说,续航能力可以通过改进蓄能和驱动方式来提高,除此之外,制动能量回收也是重要的方式之一。 制动能量回收,简单来说,就是把电动汽车的电机组中无用的部分、不需要的部分,甚至有害的惯性转动带来的动能转化为电能,并返回给蓄电池,与此同时产生制动力矩,使电动机快速停止惯性转动,这整个过程也就成为再生制动过程[叶永贞,纯电动汽车
制动能量回收系统研究[D].山东:青岛理工大学,2013.]。 电动汽车发展至今,已有大部分安装了类似装置以节约制动能,经过研究发现,在行驶路况频繁变化的路段,制动能量回收技术可以增加20%左右的续驶里程。 制动能量回收方法 制动能量回收方法有常见三种: 飞轮蓄能。特点:①结构简单;②无法大量蓄能。 液压蓄能。特点:①简便、可大量蓄能;②可靠性高。 蓄电池储能。特点:①无法大量蓄能②成本太高。 电动汽车制动能量回收系统的结构 无独立发电机的制动能量回收系统。①前轮驱动制动能量回收系统;②全轮驱动能量回收制动系统。有独立发电机的制动能量回收系统。 系统传动方式 液压混合动力系统的系统传动方式有四种:串联式;并联式;混联式;轮边式。 串联式混合动力驱动系统。串联式混合动力驱动系统,动力源有:发动机和高压蓄能器。 这种方式只适合整车质量小、车速不能过高的小型公交车等。 并联式混合动力驱动系统。并联式混合动力驱动系统动力源是发动机和高压蓄能器。但并联式车辆在制动能量再生系统不工作或出故障时可以由发动机单独直接驱动车辆。 并联式系统的驱动路线有两条,一条是由发动机传给变速器,
电动汽车自动变速器设计研究
电动汽车自动变速器设计研究 时间:2011-04-30 14:39来源:南昌大学机电工程学院作者:黄菊花等点击: 次 本文首先简述了常见自动变速器的结构原理和优缺点,结合电动汽车电机特性和双离合器自动变速器的优点,提出将两挡双离合器自动变速器应用于电动汽车。 0引言 电动汽车以可再生清洁的电能为动力,克服了传统内燃机汽车的环境污染和资源短缺问题;电动汽车牵引电机相对传统内燃机具有较宽的工作范围,并且电机低速时恒转矩和高速时恒功率的特性更适合车辆运行需求。然而固定速比减速器仅有一个挡位,使得电动汽车电机常处在低效率区域,既浪费宝贵电池能量而使续驶里程减少,又提高了对牵引电机的要求。电动汽车牵引电机既要在恒转矩区提供较高瞬时转矩,又要在恒功率区提供较高运行速度,才能满足车辆的高速、爬坡和加速等整车性能要求。为使电动汽车发挥其优越性,并降低电动汽车对动力电池和牵引电机要求,电动汽车传动系统应多挡化。 手动变速器换挡操纵复杂以及换挡过程中需要切断动力源影响电动汽车的驾驶性能和舒适性。自动变速是车辆变速发展趋势,自动变速器相对手动变速器具有较高整车的安全性、舒适性等性能。基于平行轴式手动变速器的双离合器自动变速器,不仅继承了手动变速器传动效率高、结构紧凑、价格便宜等许多优点;同时还解决了换挡动力中断问题,也保留了液力自动变速器、无级自动变速器等换档品质好的优点。因此电动汽车采用两挡双离合器自动变速器具有更好的整车性能。 1电动汽车自动变速器结构原理 1.1系统结构原理图 图1 所示为两挡双离合器自动变速器系统结构原理图,它以变速器电控单元为中心,接收制动踏板、选择开关、加速踏板等传感器获知的信号,同时可以利用CAN 总线技术接收来自整车控制器的信号,如车速、电机转速等信号。变速器电控单元采集当前路况信息,通过一定的换挡规律发出信号指令,控制离合器执行机构操纵离合器的分离与结合等动作。
新能源汽车电气技术教案47-48-新能源汽车制动系统认知
教学设计
教学过程 教学环节教师讲授、指导(主导)内容 学生学习、 操作(主体)活动 时间 分配 一、二、三、组织教学: 组织学生起立,师生问好。 导课部分: 作为一名新能源汽车售后服务人员,你知道纯电动汽车、混 合动力汽车制动系统于传涛的汽车制动系统有什么区别吗? 新授部分: 1.混动汽车制动系统的工作原理 电源开关打开后,蓄电池想控制器供电,控制器开始工作, 此时Emb信号灯显示系统应正常工作。驾驶员进行制动操作 时,首先由电子制动踏板行程传感器弹指驾驶员的制动意图, 把这一信息传给ECU。ECU汇集轮转速传感器、制动踏板行 程传感器等各路信号。根据车辆行驶状态计算出每个车轮的 最大值动力,在发出指令给执行器,让其执行哥车轮的制动, 电动机械制动器能快速而精确的提供车轮所需制动力,从而 保证最佳的整车减速和车辆的制动效果 2.制动能量回收系统 制动能量回收是电动汽车与混合动力汽车重要技术之一, 也 是它们的重要特点。在普通内燃机汽车上,当车辆减速、制动 时,车辆的运动能量通过制动系统而转变为热能,并向大气中 释放。而在电动汽车与混.合动力汽车上,这种被浪费掉的运动 能量已可通过制动能量回收。 3.制动能量回收系统的原理 一般情况下,在车辆非紧急制动的普通制动场合,约1/5的能量 可以通过制动回收。制动能量回收按照混合动力的工作方式 不同而有所不同。在发动机气门不停止工作场合,减速时能够 回收的能量约是车辆运动能的1/3。通过智能气门正时与升程 控制系统使气门停止工作,发动机本身的机械摩擦(含泵气损 失)能够减少约70%。回收能量增加到车辆运动能量的2/3。 班长报告出勤人数、 事由 学生进行回答 多媒体课件、动画演 示,制冷系统各部件 的作用。 2分 5分 15分 15分 15分 15分
纯电动汽车传动系统知识分享
第一章绪论 1.1 课题的目的意义: 1.1.1 纯电动汽车的背景 当前,我国电动汽车发展已经进入关键时期,既面临重大的发展机遇,也面临着严峻的挑战。我国电动汽车发展中还存在很多需要解决的问题,如核心技术还不具备竞争力,企业投入不足,政府的统筹协调能力还没有充分发挥等。总体上看来,我国电动汽车产业,起步不晚,发展不慢,但是由于传统汽车及相关产业基础相对薄弱、投入不足,差距仍然存在,中高端技术竞争压力越来越大,因此,必须加大攻坚力度,推动我国汽车产业向创新驱动转型,提高核心技术竞争力,确保我国汽车行业的可持续发展。 纯电动汽车使用电动机作为传动系统的动力源,缓解了能源紧缺的压力,实现了人们长期以来对汽车零尾气排放的期盼,传动系统作为汽车的核心组成部分,其技术创新是纯电动汽车发展的必经之路。 1.1.2 纯电动汽车的意义 近年来,关于纯电动汽车的研究主要集中在能量存储系统、电驱动系统和控制策略的开发研究三方面。 能量存储系统相当于纯电动汽车的发动机,是纯电动汽车电动机所需电能的提供者。目前,铅酸蓄电池是使用最为广泛的,但其充电速度较慢,使用寿命短,节能环保差。随着电动汽车技术的发展,其他电池正在渐渐取代着铅酸蓄电池。目前发展的新电源有纳硫电池、锂电池、镍镉电池、飞轮电池、燃料电池等,尽管这些新电源投入应用,但是短时间内还是无法解决纯电动汽车电源充电缓慢,电量存储低续航里程短的问题。 纯电动汽车整车控制策略的开发研究一直在紧锣密鼓的进行着,整车控制系统是纯电动汽车实现整车控制和管理的关键,是实现和提高整车控制功能和性能水平的一个重要技术保证。其核心技术主要体现在整车控制软件的架构设计、转矩控制策略以及对整车和各系统得能量管理上。尽管控制策略的开发研究一直没有间断,但是,系统开发较为复杂,进度较慢。
电动汽车驱动控制系统设计.
电动汽车驱动控制系统设计 摘要 驱动系统是电动汽车的心脏,也是电动汽车研制的关键技术之一,它直接决定电动汽车的性能,本文根据异步电动机矢量控制理论,结合电动汽车的实际要求,研究设计基于无速度传感器矢量控制的电动汽车驱动系统。矢量控制通过坐标变换将定子电流矢量分解为转子磁场定向的两个直流分量并分别加以控制,从而实现异步电动机磁通和转矩的解耦控制,已达到直流电动机的控制效果。最后,在Matlab环境中建立了仿真系统,验证了无速度传感器矢量控制系统原理应用于电动汽车驱动系统的可行性。 关键词:电动汽车;驱动系统;异步电动机;无速度传感器矢量控制
ABSTRACT Driving system is the heart of EV and one of the key parts of the vehicle that determines the performance of the EV directly. According to the control technique、the method of induction motor drive system and based on the factual requirement of EV, the speed sensorless vector control was designed in this article. By transforming coordinate, the stator current is decomposing two DC parts which orientated as the rotator magnetic field and controlled respectively, So magnetic flux and torque are decoupled. It controls the asynchronous motor as a synchronous way. Finally, intimation system is established in the environment of Matlab to validate these control arithmetic. The system proved its enormous practical value of application. Key words: EV; Drive system; Induction motor; speed sensorless vector control
电动汽车助力器
电动汽车真空助力制动系统的匹配计算与研究 以某微型汽车为例,建立了其真空助力制动系统的数学模型,对燃油汽车改装为电动汽车后的制动系统真空助力匹配进行了计算分析,从而为电动汽车真空助力系统中真空罐、真空助力器、真空泵的选型和匹配提供了理论依据。通过试验验证可知,本文的真空罐及真空泵阀值选择合理,电动真空泵工作时间为4~6 s。 绝大多数微型汽车和轿车采用真空助力伺服制 动系统。传统燃油汽车由发动机提供真空助力源,而纯电动汽车或燃料电池汽车的制动系统由于没有真空动力源而丧失真空助力功能,仅由人力所产生的制动力无法满足行车制动需要,因此需要对制动系统真空助力装置进行改装,而改装的核心问题是产生足够压力的真空源。考虑到行车制动可靠性及能源的节约,有必要对真空助力制动性能进行合理分析计算,以此为电动真空泵、真空储能机构的选择或设计提供理论依据。本文以改装的纯电动汽车为例,对其真空助力制动系统进行计算分析,在保证制动性能的前提下,设计出合理的所需真空度及合适的真空储能罐,为电动真空泵的选型提供理论依据。 原车采用带有真空助力装置的双管路液压制动系统和前盘后鼓式制动器。真空助力器安装于制动踏板和制动主缸之间,由踏板通过推杆直接操纵,真空助力器的真空伺服气室由带有橡胶的活塞分为常压室(与真空源连接)与变压室,一般常压室的真空度为66 . 7 kPa 。真空助力器所能够提供的助力大小取决于其常压室与变压室气压差值。制动系统真空助力装置的真空源来自于发动机进气歧管。拆除发动机总成后,制动系统由于没有了真空源而丧失真空助力功能,为此,需要重新匹配一个能够提供足够压力的真空源。若采用真空泵与电源直接相连的方案,一旦汽车接通电源,真空泵就开始持续工作,这样的工作情况比较苛刻,根据整车道路试验情况,汽车在城市工况下行驶6000 km后,电动真空泵就出现损坏。虽然现在真空泵寿命最小可以达到600h,但还是不能达到可以接受的目标行驶里程,故需要增加真空储能机构来延长行驶里程。真空泵采用间歇性工作模式,可以提高制动系统的工作寿命和可靠性。 图1为改装后的电动汽车真空助力制动系统。电动汽车起动时,控制程序会检测真空储能罐中的真空度。在行驶状态下,监控系统会监控真空储能罐中的真空度,低于设定的下限值时立即启动真空泵工作,达到设定的上限值时真空泵停止工作。 当真空助力器初始真空度小于34.7 kPa时,制动器不能提供足够的制动力 真空储能罐体积为2L 在一次完全制动工况下,真空储能罐中真空度降低值为48.4 kPa,即真空泵在不工作状态下,储存的真空度要够一次完全制动,就不得小于48.4 kPa。 真空度压力建立关系曲线如图4所示,从中可以看出,到60 kPa以后,斜率变小,制动真空泵压力建立时间增大。因此,真空度的选择要兼顾真空泵寿命和助力效果。电动机不工作时,踩下制动踏板时的真空度为48.4 kPa。结合真空泵真空度压力建立特性,电动真空泵停
新能源汽车电制动简述
新能源汽车电制动简述 概述:全文共5部分。第一部分,纯电动汽车制动系统概述,主要介绍电动真空助力系统的主要组成元件和工作原理;第二部分,混合动力汽车制动系统,主要介绍混合动力汽车电子制动控制系统的主要组成元件和工作原理;第三部分,制动能量回收系统,主要介绍制动能量回收系统的原理和能量回收模式;第四部分,拓展知识,主要介绍EMB电子机械制动系统、brake-by-wire的发展简介;第五部分,案例,主要介绍本田第四代IMA混合动力系统的制动能量回收系统控制;第六部,传统汽车刹车系统,主要介绍鼓式和盘式刹车。 一、纯电动汽车制动系统 纯电动汽车采用的液压制动系统与传统汽车基本结构区别不大,但是在液压制动系统的真空辅助助力系统和制动主缸两个部件上存在较大的差异。 绝大多数的汽车采用真空助力伺服制动系统,人力和助力并用。真空助力器利用前后腔的压差提供助力。传统汽车真空助力装置的真空源来自于发动机进气歧管,真空度负压一般可达到0.05~0.07MPa。对于纯电动汽车由于没有发动机总成即没有了传统的真空源,仅由人力所产生的制动力无法满足行车制动的需要,通常需要单独设计一个电动真空泵来为真空助力器提供真空源。这个助力系统就是电动真空助力系统,即EVP系统(Electric Vacuum Pump,电动真空助力)。
如图1所示,电动真空助力系统由真空泵、真空罐、真空泵控制器(后期集成到VCU整车控制器里)以及与传统汽车相同的真空助力器、12V电源组成。 电动真空助力系统的工作过程为:当驾驶员起动汽车时,车辆电源接通,控制器开始进行系统自检,如果真空罐内的真空度小于设定值,真空罐内的真空压力传感器输出相应电压信号至控制器,此时控制器控制电动真空泵开始工作,当真空度达到设定值后,真空压力传感器输出相应电压信号至控制器,此时控制器控制真空泵停止工作。当真空罐内的真空度因制动消耗,真空度小于设定值时,电动真空泵再次开始工作,如此循环。 (一)电动真空助力系统的主要组成元件 以下介绍电动真空助力系统的主要组成元件。 (1)真空泵 真空泵是指利用机械、物理、化学或物理化学的方法对被抽容器进行抽气而获得真空的器件或设备。通俗来讲,真空泵
研究燃料电池电动汽车动力传动系统关键技术
研究燃料电池电动汽车动力传动系统关键技术 ,蓄电池为辅助能量来源。汽车需要的功率主要由燃料电池提供。可以说, 车用燃料电池的选取,对于燃料电池汽车的性能至关重要。 本文介绍了燃料电池汽车动力传统技术发展概况,围绕燃料电池电动汽车动力传动拓扑架构、多源系统管理和动力系统配置与仿真优化技术等关键技术开展 了详细论述。 2动力传动系统拓扑构架设计 燃料电池汽车的运行并不是一个稳态情况,频繁的启动、加速和爬坡使得汽车动态工况非常复杂。燃料电池系统的动态响应比较慢,在启动、急加速或爬陡坡时燃料电池的输出特性无法满足车辆的行驶要求。在实际燃料电池汽车上,常常需要使用燃料电池混合电动汽车设计方法,即引入辅助能源装置(蓄电池、超级 电容器或蓄电池十超级电容器)通过电力电子装置与燃料电池并网,用来提供峰 值功率以补充车辆在加速或爬坡时燃料电池输出功率能力的不足。另一方面,在汽车怠速、低速或减速等工况下,燃料电池的功率大于驱动功率时,存储富余的 能量,或在回馈制动时,吸收存储制动能量,从而提高整个动力系统的能量效率。2.1直接燃料电池混合动力系统结构 直接燃料电池混合动力系统式结构中采用的电力电子装置只有电机控制器,燃料电池和辅助动力装置都直接并接在电机控制器的入口。如丰田的FCHV-4[16], FIAT-Elettra[17]和日产X-TrailFCV[12]等都采用这种类似的结构设计。 辅助动力装置扩充了动力系统总的能量容量,增加了车辆一次加氢后的续驶里程;扩大了系统的功率范围,减轻了燃料电池承担的功率负荷。许多插电混合的 燃料电池汽车也经常采用这样的构架,美国Ford 公司Edge Plug-in 燃料电池轿车和GM 公司Volt Plug-in 燃料电池车[18]。这种插电式混合动力汽车将有效的减
纯电动汽车驱动系统的参数设计及匹配
纯电动汽车驱动系统的参数设计及匹配 张珍 (长安大学) 摘要:本文系统的介绍了纯电动汽车驱动系统主要部件的选型及根据电动汽车主要性能的要求进行主要参数的设计及匹配,并通过对具体的车型的计算,进一步探讨了主要参数的确定。 关键词:纯电动汽车(EV) 驱动系统参数设计 1、前言 纯电动汽车(EV)即蓄电池电动汽车是“零污染”的绿色环保交通工具,它没有噪声和振动、操作性能好等远远优于内燃机汽车。EV是当前开发和研制取代内燃机汽车的首选车型,其前景广阔。 目前,我国的EV大都建立在改装车的基础上,其设计是一项机电一体化的综合工程。改装后的EV高性能的获得并不是简单地将内燃机汽车的发动机和然油箱换成电动机和蓄电池便可以实现的,它必须对储能装置、动力装置及变速器、减速器等参数进行合理的匹配。鉴于目前国内对EV研究的现状,故本论文的研究建立在传统汽车驱动系统的基础上。 2、电动汽车的驱动系统的基本结构 本文研究的EV的电力驱动结构形式如图1所示 图1 电驱动的形式 C——离合器;D——差速器;GB——变速器;M——电动机
3、主要部件的选型及主要参数的确定 EV 驱动系统的关键部件为:电动机、蓄电池、变速器等,这些部件类型的选择及参数设置直接决定着EV 的动力性和续驶里程等主要性能。 3.1电动机的选型及其参数的设计 3.1.1电动机的选型 电动机的选择要满足EV 对电动机性能的要求:①高电压、高转速、质量轻;②电动机具有较大的起动转矩和较宽的调速性能;③高效率、低能耗、实现制动能量的收回;④安全性必须符合相关部门的标准和规定。另外,电动机还要求可靠性好、寿命长;结构简单,适合大批生产,使用维修方便,价格低等。 3.1.2电动机额定功率的选择 本课题采用某电动汽车的部分技术参数如表1 表1 电动汽车的部分技术参数 电动机额定功率可根据EV 的最高行驶车速、爬坡和加速性能来确定[1]。建立电动机额定功率的数学模型: t D a m V A C V f g m P η÷??? ???????+???≥7614036003max max 1 (1) t a D a a a a m V A C V g m V f g m P ηαα÷??????? ???+???+????≥761403600sin 3600cos 32 (2) t a a D a m V dt du m V A C V f g m P ηδ÷?????????+??+???≥360076140360033 (3) 式中: max V =100km/h ;a m =1600(kg);D C =0.2;a V =30km/h ;ηt =0.9;
制动工况对对电动汽车制动回收能量影响的分析3
制动工况对电动汽车制动能量回收影响分析 前言 随着能源和环境问题日益突出,电动汽车已成为替代传统内燃机汽车的最佳选择。受限于当前技术条件,电动汽车续驶里程普遍较短,电动汽车节能技术成为电动汽车研究的重要方面,其中再生制动作为电动汽车节能主要手段,受到国内外学者广泛关注[1-2]。设计阶段的电动汽车结构和动力系统设计、运行阶段的控制策略和制动工况等都是影响再生制动能量回收效果的因素[3]。 目前,制动工况方面的分析研究,多集中对制动工况进行解耦,分别研究制动初速度和制动强度对制动回收能量效果的影响[4-6],并未综合分析制动工况各因素影响能量回收效果之间的耦合关系,或分析制动强度与制动初始速度对能量回收效果贡献大小。 制动工况分为两种,单次制动工况和循环制动工况[7],循环制动工况多用在试验条件下对电动车性能测试,日常驾驶中更多应用的是单次制动工况。单次制动工况为本文研究工况,其影响因素包含两个方面:制动强度(z )和制动初速度。 本文以较为普遍的集中电机前轴驱动电动汽车为研究对象,采用制动稳定性较好的理想制动力分配策略,利用Matlab/Simulink 与Isight 建立联合仿真平台,对由制动初速度和制动强度组成的连续设计空间进行试验设计(DOE)。采用最优拉丁超立方设计(Optimal latin hypercube design ,OptLHD)对连续设计空间进行采样,分析制动回收能量与制动初速度和制动强度之间的关系,分析制动工况对制动能量回收的主效应和交互效应,和影响制动能量回收的主次因素。 1制动能量回收影响因素分析 再生制动时受各种阻力损耗、摩擦制动器消耗、电机和电池工作特性和效率、相关部件工作效率等方面的影响,未能将制动动能完全转化为电能存储在蓄电池中。综上各方面将主要因素分为一下三类: (1)影响制动总能量的因素,制动总能量计算公式为()222 1e s v v m E -=(式中,E 为制动总能量,kJ ;m 为电动车整备质量,kg ;s v 和e v 分别为为车辆制动初始和终止速度,1s m -?),得出影响因素主要是制动初速度、电动汽车整备质量等。 (2)影响可回收能量的因素,如制动强度、车辆结构(滚动阻力消耗、空气阻力消耗等)、制动力分配策略(摩擦制动损耗)等。 (3)影响再生制动回收能量的因素,如驱动系统布置、电机和电池工作特性、传动系统特性、各部件及传递线路损耗、控制器损耗等。 以上影响因素主要归为四个方面:车辆结构、动力系统结构、制动工况、制动控制策略,在设计阶段车辆结构、动力系统结构和控制策略确定后,制动工况成为可根据驾驶员主观操纵的影响再生制动能量回收效果的唯一因素。 2仿真模型与验证 2.1理想再生制动力分配策略 本文采用文献[8]中制定的理想制动力分配策略。理想再生制动力分配策略可以保证前后轴制动力得到合理分配,制动稳定性好,该策略包含制动力在前后轴的分配及在电机制动力与摩擦制动力之间的分配两部分。分配电机制动力和摩擦制动力时要优先利用电机制动力,不足部分再由摩擦制动力补充。 2.2建立仿真模型 使用MATLAB/Simulink 建立整车、电机、电池和控制策略等模型,整车参数如表1所示。
QCT电动汽车再生制动系统测试和评价方法征求意见稿
QC/T《电动汽车再生制动系统测试和评价方法》 征求意见稿-编制说明 (一)工作简况(包括任务来源、主要工作过程、主要参加单位和工作组成员及其所做的工作等: 制动能量回收作为电动汽车提高能源利用效率的重要技术之一,是体现电动汽车优势和特点的重要技术,是决定多种形式电动汽车能耗经济性、整车安全性的一项共性关键技术。2012年国家发布了《节能与新能源汽车产业发展规划(2012—2020年)》,电动汽车将在未来得到长足发展,在此背景下,“制动能量回收”这一基础节能技术也将会得到大力发展和推广应用。为促进电动汽车技术发展,在2013年底,“再生制动系统测试和评价方法”的行业标准由全国汽车标准化技术委员会电动车辆分委会立项(计划号:2013 - 2106T - QC),开展制定研究。 2013年11月19日,在标准研究计划下达后,全国汽车标准化技术委员会电动车辆分委会电动汽车整车标准工作组在第四次工作会议上启动了《电动汽车再生制动能量回收系统测试和评价方法》的研究和起草工作。 2014年7月29日,电动汽车整车标准工作组换届会议暨第一次工作会议上,标准起草人就《电动汽车再生制动系统测试和评价方法》标准的“背景”、“国内外研究现状”、“制动回收系统评价指标的确定”、“测试评价方法制定”、“试车验证试验”等方面进行介绍,与会专家就测量精度和方法等方面展开讨论,形成标准第一版草案并发到工作组征求意见。 2015年7月23日,结合前期工作组意见反馈情况,起草人完善了标准草案,在本次会议上再次就标准制定的背景、技术内容和计算方法进行汇报,工作组内部达成一致意见。 2015年8月至今,在工作组内部进行了数轮讨论和意见征求,形成标准征求意见稿。 (二)标准编制原则和主要内容(如技术指标、参数、公式、性能要求、试验方法、检验规则等)的论据,解决的主要问题,修订标准时应列出与原标准的主要差异和水平对比: (1)编制原则 本标准主要根据已有课题研究成果、参考美国加州技术支持文件“轻型电动汽车Ⅲ温室气体非试验循环规定”(“LEV Ⅲ GREENHOUSE GAS NON-TEST CYCLE PROVISIONS”)中关于电动汽车制动能量回收方面的部分技术内容,以及国内现有的电动汽车标准法规GB/T 19596《电动汽车术语》、GB/T《18386电动汽车能量消耗率和续驶里程试验方法》、GB《7258机动车运行安全技术条件》、GB《21670乘用车制动系统技术要求及试验方法》中的相关技术内容进行了修改及丰富。 标准编制过程充分调研了国内外相关标准的情况,对制动系统原理、测试方法和评价指标进行了深入对比研究和试验验证,工作组内企业对修订内容进行多次征求意见,并在会上
纯电动汽车驱动系统设计及仿真 毕业设计
纯电动汽车驱动系统设计及仿真毕业设计
纯电动汽车驱动系统设计及仿真 学院 专业 年级班别 学号 学生姓名 指导教师 2015年 6 月
摘要 随着环境污染的加剧和资源的日益短缺,纯电动汽车(EV)凭借能源利用率高、环境污染小的特点得到广泛关注和快速发展,成为当前研制取代内燃机汽车的首选车型,其发展前景广阔。作为纯电动汽车核心部件之一,驱动系统直接决定了纯电动汽车整车性能优劣,目前我国的纯电动汽车存在的主要问题是续航里程少和动力能源电池成本高,基于此种情况,对驱动系统进行合理设计,是提高电动汽车的动力性能和增加续航里程的有效手段,所以文章对纯电动汽车驱动系统进行设计研究。 本文首先分析了纯电动汽车的特点,包括无污染、噪声低、结构简单、能源效率高且多样化等。然后分析了纯电动汽车驱动系统的整体结构和工作原理,并以某普通普及车型为基础,对驱动系统进行设计改善。先确定相应动力参数目标,然后根据整车参数进行理论计算,参考相应手册和市场上的部件,选择合适的驱动系统结构装置,如电机、蓄电池的类型和相关参数。最后利用车辆系统仿真软件ADVISOR(Advanced Vehicle Simulator)对纯电动汽车进行动力性能仿真实验。首先建立了仿真模型,包括选择传动系统类型、设置参数、设计控制策略,然后选择仿真工况进行加速性能和爬坡性能的仿真,最后得到仿真性能结果图表,包括仿真参数图、参数仿真报告、能源消耗图、虚拟回放。基于符合初始设计技术要求的参数,利用ADVISOR里的AUTOSIZE软件模块进行参数优化,然后对得到的优化参数值进行仿真,进一步分析纯电动汽车驱动系统仿真动力性能,确定最优参数。 关键词:纯电动汽车、驱动系统、结构参数、动力学、仿真
纯电动汽车整车控制系统教案
课程单元教学设计任课教师:科目纯电动汽车整车控制系统检修授课班级:
一、知识一、任务导入 假如你是北汽新能源4S店的一名车辆维修人?员,需要对某待维修 的车辆进行整车状态参数读取,请问你会正确使用故障诊断仪进行 数据流读取吗 二、内容及过程设计 教师活动 1、电动汽车整车控制系统的作用 控制系统的基本概念 控制系统一般包括传感器、控制器和执行元件。传感器采集信 息并转换成电信号发送给控制器,控制器根据传感器的信息进行运 算、处理和决策,并向执行元件发送控制指令以完成某项控制功能。 北汽EV160纯电动汽车整车控制系统的组成 ? 北汽EV160纯电动汽车的整车控制系统结构如图所示,按照各 部件的功能,可以将整车控制系统分为动力电池系统、充电系统、 驱动电机系统、传动系统、电动助力转向系统、制动系统等。该车 的主要高压部件,都集中在了汽车前机舱内,如电机控制器、高压 控制盒DC/DC变换器、车载充电机、驱动电机等。 教 师: 引 出 话 题 教 师: 板 书、 展 示、 解 说、 提 问 提 问、 启 发 比 喻 多 媒 体 展 示、 互 动 步骤教学内容教师、 学生 活动 教 学 方 法 与 手 段 时 间 分 配
二、 技能 一、技能训练项目及组织 2、实训组织 1)分两组,每次一组组,其他学生完成布置作业 2)实习、学习指导(教师分工 (1)一位教师负责实训室进行操作示范 (2)另一位教师负责指导完成相关学习任务 3、使用设备 教师: 示范演 示
4、安全和纪律要求 1、穿好工作服、讲究仪容仪表 2、服从安排,遵守纪律,讲究秩序 3、不允许擅自乱动设备 5、学习评估 按学校要求评估
电动汽车模型后驱动桥的设计和制作
电动汽车模型后驱动桥的设计和制作 摘要 汽车后桥是汽车的主要部件之一,其基本的功用是增大由传动轴或直接由变速器传来的转矩,再将转矩分配给左右驱动车轮,并使左右驱动车轮具有汽车行驶运动所要求的差速功能:同时,驱动桥还要承受作用于路面和车架或承载车身之间的铅垂力、纵向力,横向力及其力矩。其质量,性能的好坏直接影响整车的安全性,经济性、舒适性、可靠性。 本文阐述了汽车驱动桥的基本原理并进行了系统分析,确定了电动汽车模型驱动桥的结构形式、布置方法、主减速器总成、差速器总成、桥壳等结构型式;并对主要零部件进行了强度校核,完善了驱动桥的整体设计。 关键词:电动汽车模型驱动桥主减速器差速器
Drive axle of the electric vehicle models in the design and production Abstract Drive axle is one of the most important parts of automobile. The function is to increase the torque from drive shaft or from transmission directly, and then distribute it to left and right wheels which have the differential ability automobile needed when driving. And the drive axle has to support the vertical force, longitudinal force, horizontal force and their moments between road and frame or body. Its quality and performance will affect the security, economic, comfortability and reliability. This paper describes the basic principles of automotive drive axle and carries out a systematic analysis.We have identified a model of electric vehicle drive axle of the structure, layout method, the main gear assembly, differential assembly and other structural types,and conducted a strength check of major components, and improve the overall design of the drive axle. Keywords:Electric vehicle model, Drive axle, Final drive, Differential