Jack的操作方法

第一章 Jack 的界面
当你打开jack的时候你看见用户界面,默认界面包括可以放置模型的图形窗口以及包含标准菜单和图标的控制条。此外,界面上还显示一个包含环境深度的对象层次结构,会话日志和几个脚本平台。
启动Jack
Jack的所有窗口都是完全独立的,可以根据自己的喜好移动,Jack使用的窗口、菜单、工具栏都符合标准的Windows操作方法。Jack还包含一些非标准的便捷功能。
控制条
控制条分为四个部分:菜单、图标工具栏、消息区域、移动控制栏。它提供了访问几乎所有通过菜单和图形图标的杰克功能。下图说明了控制栏的主要领域。
菜单
菜单提供了Jack的命令结构的起点。在标准格式菜单窗口可以单击鼠标左键访问。文件、编辑、查看以及Jack具体问题涉及到人体、对象、功能、和分析均包括在内。除此之外,他提供了一个模块系统,允许把它添加到软件的运行中去为运行提供附加功能。 Jack有很多特殊模块都很有用,你可以根据需要来创建自己的模块。
菜单条
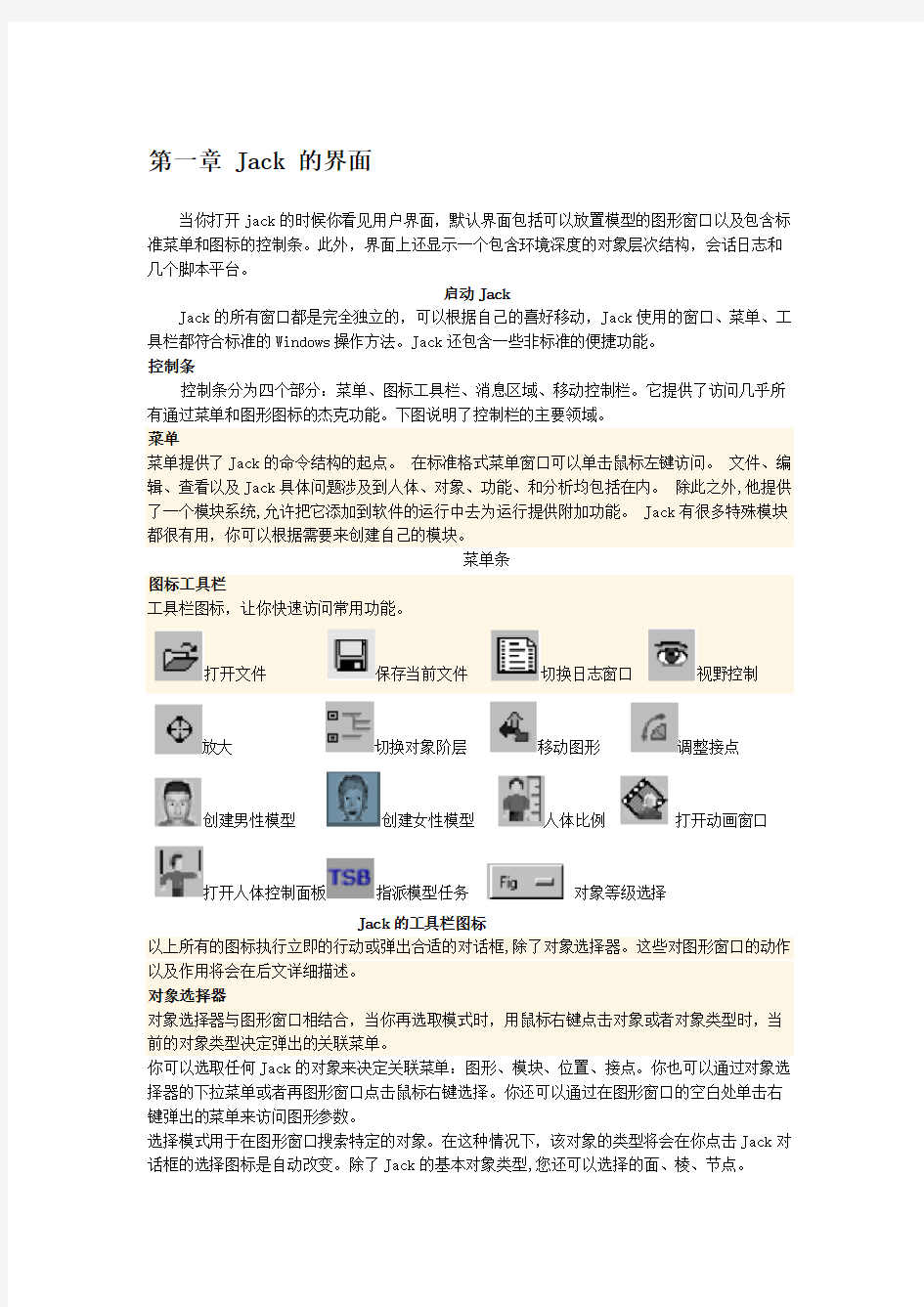
图标工具栏
工具栏图标,让你快速访问常用功能。
打开文件保存当前文件切换日志窗口视野控制
放大切换对象阶层移动图形调整接点
创建男性模型创建女性模型人体比例打开动画窗口
打开人体控制面板指派模型任务对象等级选择
Jack的工具栏图标
以上所有的图标执行立即的行动或弹出合适的对话框,除了对象选择器。这些对图形窗口的动作以及作用将会在后文详细描述。
对象选择器
对象选择器与图形窗口相结合,当你再选取模式时,用鼠标右键点击对象或者对象类型时,当前的对象类型决定弹出的关联菜单。
你可以选取任何Jack的对象来决定关联菜单:图形、模块、位置、接点。你也可以通过对象选择器的下拉菜单或者再图形窗口点击鼠标右键选择。你还可以通过在图形窗口的空白处单击右键弹出的菜单来访问图形参数。
选择模式用于在图形窗口搜索特定的对象。在这种情况下,该对象的类型将会在你点击Jack对话框的选择图标是自动改变。除了Jack的基本对象类型,您还可以选择的面、棱、节点。
消息区
消息区为你提供信息反馈操作和工具提示让你可以与Jack互动。例如,当移动鼠标指针在工具栏上的图标,你会看到描述每个图标的功能。当移动鼠标光标在图形的窗口,消息区将会显示在光标之下的对象的名称。当你运行数据文件时,消息区将会反馈给你行动的进展。
消息区
移动控制器
移动控制器包含了Jack软件所有对象的移动控制。因为它是Jack运行的重要组成部分,它提高了Jack的可视化和可操作性。
用手动选择器来选择对象的移动。Jack运用笛卡尔坐标系统,间接的在空间中应用X、Y、Z坐标轴来定义位置与方向。你也可以在移动控制器中输入坐标或者直接用鼠标拖动对象。
移动控制器
你也可以通过分别点击鼠标左右键来沿着X轴Z轴移动。用中标中键让对象升高(沿着Y轴移动)。一个大的红箭头来表明移动方向。你也可以让物体围着任意坐标轴旋转通过运用SHIFT+鼠标左键、右键、中键。三维参考系可以对于关联与整体或者只对局部其左右甚至是一个对象,但是,移动控制器显示的坐标总是整体坐标。
鼠标左键沿着X轴移动
鼠标右键沿着Z轴移动
鼠标中键沿着Y轴移动
SHIFT+鼠标左键围绕X轴旋转
SHIFT+鼠标右键围绕Y轴旋转
SHIFT+鼠标中键围绕Z轴旋转
鼠标移动对象命令
(注:同时按下鼠标两个键允许对象围着两个坐标轴移动)
移动
这项功能允许任意对象基于任一参考点移动。Jack已经可以使人物模型与人体H点匹配。这项特性基于任意现有的位置和接点实现任意移动方式到任意位置的获取或者请求。
JT模型没有应用在Jack软件中,特别是没有应用在接点中。因此,逐点移动是不可行的。但是当源模型的位置被定义在全局领域而不是局部定义时,按位置移动提供了一个替代的方法。
在对象模型上创建场地时可以用光标对齐法来设定场地位置。
对于人物模型来说,在场地中移动而不是从源数据中设置可能会导致行为和自由度发生设置错误。
整体与局部的转换
移动操作描述迄今沿用整体坐标轴,它有时与模型本身联系紧密使得沿坐标轴平移和围绕坐标轴旋转很方便。整体与局部的转换为模型相对于全局环境或者当前方想的相对定位提供了一个方法。
整体转换
局部转换
几何单元
直接操作很适合全局运动或者粗略的运动,但很难调整相对于其他对象的属性,单元选择为模型间的精确定位提供了一个有效的方式,在你使用移动控制器时它们可以随时被使用,下列是不同的单元选择命令,更多内容请参见附录。
光标点光标所在位置
现场现场位置和方向
现场位置现场位置
现场方向现场方向
接点位置接点位置
棱线到棱线最近的点
棱位置到棱最近的点
棱方向对齐到一个棱的方向
面位置面里最近的点
面中心面的中心
平面一个平面上最近的点
面方向对齐一个面的方向
体方向对齐整体参考系
地平面移动最低点到y=0处
现场H点移动人体H点到现场
单元命令定义
图形窗口
图形窗口包含了3D场景,你可以用多个视角观察模型或者应用挂在每个窗口的附件,图形窗口也可以随时缩放。计算、图形、用户界面,总处理利率都显示在右上角的空白的角落。描述场景综合效率的数据也在那里显示
图形窗口
改变视角
改变视角在Jack中是一项非常基本的操作,通过Ctrl键你可以随时改变视角,按下Ctrl键你可以操纵视角相机的位置,松开Ctrl键就会还原到之前的状态。
视角参考
当你改变视角的时候一个黄色立体交叉坐标系或者协调框架会出现在窗口中,这代表了相机的焦点或者视角,注意,用鼠标左键来旋转中心焦点,视角将被固定在当前状态,注意左右移动鼠标和前后移动鼠标的区别。
按下鼠标中键移动鼠标会移动镜头,这时焦点将会相对模型移动,再次注意左右移动鼠标和前后移动鼠标的区别,最后,鼠标右键将会放大镜头,使得镜头焦点或远或近,鼠标移动的唯一功能就是镜头的放大和缩小。
同时按下Ctrl和SHIFT键将会通过移动参考视角操作场景,注意,由于你按着左键移动鼠标,场景中的模型将会围绕着镜头旋转,按下鼠标中键移动镜头焦点,模型以焦点为基准移动,注意,只按下CTRL键的结果同上。最后,按下鼠标右键将会推进或者拉远焦点。移动鼠标的左右就是调整焦点位置。
命令结果
CTRL LMB 旋转镜头
CTRL MMB 晃动镜头
CTRL RMB 缩放
CTRL + SHIFT LMB 旋转参考视角
CTRL + SHIFT MMB 晃动镜头
CTRL + SHIFT RMB 推近/拉远参考镜头
鼠标控制视角命令
弹出菜单
弹出菜单可以使你轻松访问菜单选项来指定某一类型的实体(人体模型、非人体模型、线、节、面、接点),单击右键可以快速访问弹出菜单,控制实体类型的选择对象图标(位于工具栏)将
会被选择,当你单击右键的时候这个菜单就会出现,关于对象选择的细节将会在后面章节详细指出。
弹出菜单
窗口弹出式菜单提供了访问基本视图和窗口命令,当你在窗口空白处单击右键时,弹出菜单就会出现,你可以选择上面任何的对象选择按钮,不同的模型对应不同的弹出菜单,菜单选项将会与模型息息相关。
用鼠标中键提取
当模型重叠、挨得很近或者被其他模型挡住是你很难选中你想选中的模型,旋转视角可以帮你解决,在某些时候,用别的方法解决歧义是必要的。
在Jack软件中,鼠标中键可以解决选择上的歧义,如果多个目标都在选择区域内,包含这些选项的选择实体对话框就会弹出。
空格键提取
如果你知道你想要提取的实体的名字,那么输入名字提取会比用鼠标提取简单的多,空格键提取名字会更加容易,这项功能可适用于大多数的文本输入框。
空格键提取
(注意:名称区分大小写)
自定义菜单
Jack 允许使用者购买自己的菜单,想为你的菜单添加更多自定义信息或者购买自定义菜单请联系西门子PLM软件公司
第二章档案管理
本地Jack文件
Jack提供了有效地层次模型能力,允许你导入或者建立关联模型,层次结构是熟悉的倒树结构,每个模型之间都有承接关系,这种结构定义像人体这样的复杂结构都绰绰有余,下图说明了模型的层次:
Jack建模层次
环境
(指令:文件→保存→场景)
在最高级,系统被定义为场景或者环境模型,环境是一个集成模型,每个模型包含一个或者多个段,模型中的段通过接点彼此相连,换句话说,一个模型就是有多个段组成的。
更重要的是包含信息的环境需要生成一个特定的场景(例如:模型之间的相对位置,节点的位置、尺寸、以及其他限制),这些文件的扩展名都是.env
.env文件包括:
参考图形文件(.flg)、段文件(.pss)
--图段文件也可以嵌入到.env文件中
模型的相对位置
节点的位置\角度
几何尺度
限制和附件信息
. ENV文件保存为ASCII文本,并可以在文本编辑器打开/编辑。环境文件可以参考.flg文件和.PSS文件。这使得用户可以在同一环境文件或者多个环境文件中使用同一.flg文件和.pss文件。这可以减少给定文件相关项目的大小,即使模型被修改也有效,如果你想修改在每个环境中的同一模型,直接用修改后的.flg文件替换原来的,那么所有拥有该.flg文件的环境文件中的该模型都会被修改。这个方法对于.pss文件同样适用。
如果在两个或者两个以上的环境中修改模型文件或者该模型被用于多个环境,那么你就需要在修改前保存.flg文件。如果你没保存修改的模型文件,那么该.flg文件将会被写入.env文件中,因此,如果你没有保存模型,这个.flg文件就会嵌入到.env文件中。另外,.env文件不能引用已经嵌入.env文件中的.flg文件,所以,从已经嵌入.env文件的模型中创建一个.flg文件,打开这个.env文件并保存模型,如果你重新保存了环境模型,这个.flg文件就能被.env文件引用,这个.flg文件就不会再嵌入到.env文件中了。
你最好在保存.env文件之前保存一遍修改过的.flg文件,这只针对于图形模型的修改,如果你已经在.flg文件中保存了更改,那你就不用在你保存.env文件的时候立刻保存图形,注意:如果你改变了可视性,那么Jack软件将会在你保存.env文件时提示你保存.flg文件,如果你选择保存,那么这个可视性将会被保存在.flg文件中,如果你选择不保存,那么这个可视性将会被保存在.env文件中。
重要的是了解什么不会被保存到.env文件中,举一反三,视图锥,主干,记录,双重图像,支持符号不会被保存在.env文件中。
注意:一个环境文件(.env)包含所有重建场景所需要的信息,它包括与图形关系的定义,关节位置、大小和其它限制。
图形
(命令:文件→保存→图形)
图形是有一个或者更多的片段的集合,以及相关的场所、颜色、关节。这些数据保存在一个Figure(.fig) 文件。Figure文件包含引用片段文件(.pss),场地,材料特性、关节连接。.fig文件被保存为ASCII文本,可以被文本编辑器打开/编辑。图形文件可以引用.pss文件,这就允许使用者在一个或者多个图形文件中对同一.pss文件多次引用,这可以有效地减少你所完成项目的文件大小,这对几何模型的修改也很有用,如果你想在引用过同一几何模型的图形文件中修改该几何模型,只需用新的.pss文件替换旧的.pss文件即可。
如果你修改了几何模型那么你就要在提示时保存该.pss文件,如果你没有保存,那Jack就会使用最后保存的.pss文件版本,因此你也将失去修改过的.pss文件。
即使保存你修改的.pss文件是个好习惯,只有在你更改过图形文件时需要保存,这包括合并或者分割段,除了场地、关节和材料特性的改变需要保存入.fig文件其他的都要保存到.pss文件中。
注:.fig文件包括由图形、场地、颜色、关节组成的片段,选择包括属性复选框保存属性信息。
Segments
(Command: File?Save?Psurf)
段组成层次的最低水平,这包括组成物体的细化的几何数据,这些数据被保存在psurf文件中被保存成ASCII文本,可以被任何文本编辑器打开。所以这些文件易于浏览和编辑,这些文件可延伸为.pss文件,下面所示的psurf文件的样本显示除了段落的构成。
注:记住这些性质不同的文件类型。
一个Psurf(.pss)文件,也称为段文件,仅含定义一个部分的几何信息。
一个数字文件(.fig)包含了关于这段组成图、场地、颜色、关节连接。 (接头连接和限制保留一个数字文件时节省。关节角信息是不包含一个数字文件)
一个环境文件(.env)包括所有信息,采用现场。它里面的信息定义人物之间相对的位置、关节的位置、大小、和其他限制。
Manipulations(操作)
(Command: File?Save?Manipulations)
你想稍后使用的图形或者场景的位置可能会被保存在一个.env文件中,选项包括摄影机的复选框以保存当前摄影机视点坐标的坐标。
Manipulation保存图形位置和关节角度,加载时允许你定位你加载的图形模型。
File Archiving (文件归档)
(Command: File?Archive?Save File to Archive).
文件归档功能允许用户保存文件到指定目录或者作为压缩文档(.zip)保存,或者同时作两种保存,归档文件都是被压缩过的,一般比其他文件小,特别是使用psurf-only geometry时。注:当你在一个目录中保存数据时,它会建议你保存为一个新建文件夹以免覆盖原有文件夹中的数据。
保存文件归档对话框
导入(import)
(Command: File?Import)
杰克拟用于与其他的设计和分析软件包。因此,几何输入和输出对于Jack数据交换是十分必要的。通常,你需要从外部数据源将场景需要的集合数据输入Jack,进行分析,然后导出下游流
程便于进一步利用。
导入模型可以使CAD模型、对象库中打开的模型或者Jack自带的CAD数据。
输入格式
Jack可以直接打开 VIS(.jt)文件,可以导入Vis (.jt), VRML (.wrl),
IGES(.igs, .iges),还可以直接导入stereolithography (.stl), inventor (.iv), and optimizer (.csb)文件。也可用命令行转换器也同样适用,在本章中,我们将转换成以上几种格式,在直接在命令行或者再程序里转换都可行。
格式扩展名
Vis / DirectModel (.jt)
VRML / (.wrl)
IGES (.igs)
Stereolithography (.stl)
Optimizer (.csb)
Deneb IGRIP parts (.igp, *)
Jack有能力使用上述所有转换,每一个都有各自的优点和局限性,本节将讨论最常见的转换器和他们的特点,Vis (.jt)文件在直接打开时支持纹理,不过.jt文件在导入到场景中时纹理将丢失,VRML 是唯一支持导入纹理的输入格式,IGES 文件模式将输入线框数据。
导入选项
当从文件导入菜单导入数据时优化选项和CAD选项是可用的,此外,某些文件类型的基本尺度
也是使用,而且通过转换器输出的模型类型也是可以改变的,你可以通过Jack Type选项控制输出类型。
Jack Type 输出
Psurf 1 pss file
Figure 1 fig file and 相应的pss
files
Environment 1 env file and 相应的pss
files
注: JT文件也可以直接在杰克的环境中打开。没有基于节点的操作,如捕捉到面或节点,可
直接打开JT文件。已加入的功能,使用户能够捕捉到一个游标点,以方便直接打开JT文件的工作。
JT特点
优点:
①直接加载:大多数时候可以提高10倍的加载效率,提高图形处理能力,包括可加载的文件
帧率和大小。
②图形可以无变形加载
③交换:交换:这将使用户能够访问所有JT没有的功能。可以使用弹出菜单来访问此功能。
因此可使的JT部分关闭被代替会使纹理无法维持。
④引自JT的环境文件可以被Jack和VMU加载。
局限性:
①JT图形中的关节:JT图中的段可以结合,然而关节不能再一个JT图形和其他图形间创建,
附件可以用来创建相同类型的动作。
②访问节点,面和边(不包括几何编辑功能):几个特点已在Jack加入,以帮助弥补这个。- 缩放:允许用户放大到任何场景(包括JT)的几何结构几何在光标行的第一块将被选中。
- 捕捉到光标点:同上的行为,但与移动对话。
③不支持碰撞检测与JT几何:使用psurf交换来进行碰撞检测
④JT图形中的关节创建无法在VMU环境中维持。
⑤不能加载单独的JT装配分部
⑥调整位置:可以不创建关节就移动多个分部
JT导出
版本的新功能可以时图形和场景以JT形式导出,这个选项在菜单File -> Export -> JT下可以找到
Single Figure将会以单一部分导出选中图形。
Scene export将会作为一个独立JT文件的几个部分导出场景中所有的相关图形。注释:
不支持纹理映射(即,将出口,但没有任何纹理的psurf )
不支持的导出: smoothskin图形,或JT图形
Translate Segment from JT (JT中的转换部分)
(Command: Edit?Translate Segment from JT)
为了转换一个JT文件中的单独部分,可以从分部弹出菜单和编辑菜单中选择Translate Segment from JT命令,原JT部分仍然存在,但是不可见,转换的部分将构成一个单独的数字但是连接到JT图。
Re-root Geometry Center(再定位几何中心)
有时几何图形被加载到Jack中不满意的位置,或从源数据中加载导致几何中心偏移,为了减少JT不必要的负载数据,JT加载的默认方法已经更新,因此几何中心加载时重新定位,这就是说当一个JT文件加载时,一个叫做root_override的新的源站点被创建,并放置在图的边缘框的中心,这个特点对JT图形的原始定义有很大帮助,这个定心的集合体可以被移动或者捕捉到特定位置,或者用箭头键使其围绕其轴线旋转,这也是它可以很容易的在TSB中使用这些物体。
此选项是默认启用的,不可见,在Edit-> System Defaults-> JT选项中取消Re-root Geometry Center
此功能并不适用于作为一个环境文件的一部分加载的JT文件,通过设计可以避免破坏场景中的实体,"Center Figure Root"工具将用于已有的环境。
Center Figure Root Dialog(中心图根)
这个工具在JT默认加载项不适用的情况下可以帮助用户再定位几何中心,场景中心,例如,导入的JT图形同加载的作为环境一部分的JT模型和TSB(.tsf)文件一样可以通过使用这个功能重新定位中心,想PSURFS这样的非JT数据也可以被重新定位。
这个选项可以通过主菜单(Object –> Center Figure Root),或者通过右键点击Jack场景和对象层次的一部分弹出的菜单来选择。
使用细节:
①撤消后,"root_override"站点将会被删除。
②如果命令被多次调用,"root_override"站点将会移动,其他的站点也不会被添
加。
Batch Translate Files(批量文件转换)
(Command: File?Batch Translate Files)
这个命令允许用户将同一格式的多个文件转换到Jack本地(.pss)文件中,转换的文件将会被保存到默认的主目录。
CAD Export(CAD导出)
(Command: File?Export)
VRML或IGES输出的Jack场景是你的场景,您可以与其他不具有访问杰克软件生成的3-D版本的选项,杰克可以导出个别图形或整个Jack场景。
我们宣布在版本将会删除遗留的IGES和VRML转换器,然而为了支持仍然使用这些转换器的传统的工作流程,我们在版本中保留了这些,请注意,这些提供这些功能的翻译器我们将不再更新,应用户要求,JT导入/打开与JT导出将被用来管理您的数据。
VRML Export(VRML导出)
(Command: File?Export?VRML
Jack导出VRML 版本,在两种情况下,分部定义将会被保存为VRML格式,然而集成信息将不会被保存。
VRML导出对话框
IGES Export(IGES 导出)
(Command: File?Export?IGES
Jack也导出IGES ,IGES包括保存作为Bound Plane or Trim NURBS数据的多边形数据的选项,选择独占层次选项将会保持分部定义。
IGES导出对话框
Capturing Images(捕捉图像)
(Command: File?Screen Capture)
使用Jack的设计师的主要职责是根据分析结果提出报告、发表评论、平衡内网、信息文件化、甚至是市场化,本章将介绍用于创建高质量的图像,动画,报告,并介绍使用Jack的工具。
屏幕捕捉
屏幕图像可以轻松地生成和导入到其他应用程序。它们可以包含在文件,简报,电子邮寄到同事,甚至放在网站上。
选择对话框
Screen Capture(屏幕捕捉)
请注意,你有几个不同的文件类型选项来保存图像,这些选项对于WINDOWS和UNIX 软件略有不同,选择合适的扩展文件类型是很重要的。
Rendering(渲染)
选择呈现的复选框,生成一个窗口的多通道渲染图像。这将在窗口的图像平滑锯齿边缘,渲染图像由于有绘制需要更长的创建时间。
External Applications(外部应用程序)
在你想互动扑捉屏幕时,包括图形窗口以外的情况,你可以捕捉整个屏幕,其中包括杰克的图形,信息和命令窗口,或者你可以捕捉你在Jack中模拟的东西。
平台命令结果
WINDOWS Ptrscr(截屏) 截取整个屏幕
WINDOWS Alt+ PrtScr 截取活动窗口
第三章编辑Jack环境
Jack环境可以行使诸如撤销、删除、比例等的编辑命令,还可以将环境中的材料、纹理等编辑入环境中的图形,或改变背景颜色,自定义您的环境,
Undo (撤销)
(Command: Edit?Undo)
使用此命令来撤消最后完成的命令。撤消函数的多次调用将通过历史命令倒退。
Delete Scene (删除场景)
(Command: Edit?Delete Scene)
此命令将清除包含所有模型的Jack窗口。
Scale (比例)
(Command: Edit?Scale?Scene/Figure/Segment)
Jack允许你扩展段、图形和整个环境,注意缩放图形对话框允许均匀和坐标轴比例不同程度的非均匀缩放。
缩放图形对话框
注:缩放整个环境时,人体模型不会被缩放,人体模型的缩放使用单独的人体测量学的对话框。
你也可以使用交互式缩放-改变立即发生-或者按下APPLY键后发生改变,交互式缩放的缩放因素永远和你选中的图形和部分的尺寸有关,比例因子表示模型尺寸没有改变。
另一种选择是相对的全局或局部轴缩放,当对象时围绕轴旋转时这种作用就会显现,当缩放的是全局的坐标轴时,模型形状可能会变形。
注:全局缩放不能以.env或者.fig形式保存,改变的部分必须被保存成PSURF文件。Materials (材料)
(Command: Edit?Materials)
Jack其中一个最重要的显示参数是颜色,在Jack中,在环境中的物体的外观取决于表面材料的性能以及场景中的光源参数。
Color(颜色):
创建材料时,可以使用预定义或用户定义的颜色。这是三个分量RGB颜色是用来定义在一个特定的比例环境和弥漫性参数的定义。表面材料的参数有:
Ambient(阴影色):
没有照明的表面颜色
Diffuse(固有色):
有光纤照明的表面颜色
Specular(高光色):
对象的镜面高光的颜色。
Glossiness(光泽度贴图):
光照模型模拟使用了视线方向与反射方向间家教的余弦的镜面亮点,反射光线提高了光泽度指数。如果该指数大(约50 ),镜面的亮点是小和集中。如果指数小的亮点是广阔的。
大多数情况想,物体会被赋予一个CAD系统中的材料颜色;然而,Jack将会为未设定颜色的物体随机指定颜色。
材料属性对话框
注:材料名称连同材料默认颜色将会在材料被加载时指定,改变颜色不会改变材料的名称。Textures (纹理)
(Command: Edit?Textures)
纹理贴图是增加环境趣味的有效方式,也能在不增加额外贴图的基础上增加环境真实感,Jack使用纹理平面概念,以确定如何映射到你选择的表面的图像文件,平面和纹理的相对位置和方向,面临着确定如何将投影图像。
纹理映射监视器
Key Bindings (绑定键)
(Command: Edit?Key Bindings)
预定义快捷键
就像许多软件包一样,Jack中的菜单选项可以用Ctrl或者Alt键加菜单后面的带下划线的字母来选定,杰克预定义了两个这样的组合键:
自定义快捷键
在Jack中,自定义键绑定或者“热键”可以定以Jack任何菜单中的选项,允许不使用鼠标快速选择,任何你定义的热键都会被保存知道你修改它们。
键绑定
System Defaults (系统默认值)
(Command: Edit?System Defaults)
杰克允许您自定义的工作环境内的许多功能。系统默认值对话框中包含图形窗口和系统的设置和控制。所做的任何更改系统默认将继续有效,直到恢复出厂默认。
这个对话框有几个标签页,当前系统默认定义为杰克的各个组成部分。要显示一个页面,点击其标签。要修改任何系统默认情况下,选择适当的页面,使所需的更改,然后点击Apply按钮保存所有网页上的所有变化,如果你没有点击APPLY键保存就关闭了对话框,你就会丢失你修改的默认值或者上次保存的默认值,系统默认值的适用页面有:
颜色:定义Jack环境中的颜色。此页面可以定义的物体包括:背景,网格,网站,接点,旋转轮。
图形:指定对象如何出现在图形窗口。
求解:定义Jack使用的控制3D几何图形的求解参数。
用户界面:确定用户界面(UI)如何处理库文件的警告、对话框是否置顶、以及如何保留在最近的文件列表在文件菜单上的许多文件。
单位:选择优先使用的单位(英制或公制)和幅度(如, mm, cm, m)你可以指定角度,密度,距离,力量,质量,扭矩和体积单位。
观众:选择和使用图形窗口观众定义的参数。(为了提高性能调整屏幕尺寸和固定的帧速率)JT选项:允许JT零件旋转时开放。
系统默认值对话框
第四章改变Jack中视图
本节包括了如何改变图形的可见度、创建窗口布景、图形状态(线框、透明度等)的信息,还讨论了观看环境选项。
Center All (中心化)
(Command: View?Center all)
此功能将重新定位整个场景在工作区的中心。
Zoom To (放大到)
(Command: View?Zoom To)
放大到屏幕上的选择点。
Make All Figures Visible (使所有图形可见)
(Command: View?Make All Figures Visible)
此命令将取消隐藏所有先前不可见的对象,这是全局命令,会改变Jack场景中所有的图形和段。
Toggle Segment Visibility(切换段落能见度)
(Command: View?Toggle Segment Visibility)
此命令将变换环境中所有图形的可见度,这将在全局范围内切换Jack每一个分布的可见度。
切换分部可见度前后对比
Shade Scene (阴影化场景)
(Command: View?Shade Scene)
这个命令将线框物体转换成阴影物体。
Wireframe Scene (线框化场景)
(Command: View?Wireframe Scene)
这个命令将阴影物体转换成线框物体。
Figure Projections (图形投影)
(Command: View?Figure Projections)
注:Jack还提供了一个在透明窗口中创建正交视图的方法,这些投影被清晰的投放在地平面边缘,投影对于定位物体的长宽高很有帮助,投影比打开多个个窗口更紧凑,还可以避免不停地调整视图以确保两个物体的互相定位准确。
人物图形投影
Textures On/Off (纹理/开关)
(Command: View?Textures On/Off)
这个命令将切换纹理贴图是否开启。
View Control (视角控制)
(Command: View?View Control)
你一般只需按住Ctrl键控制视角,然而,控制视角的附加选项可以从视图控制对话框中访问,视角控制对话框允许你定位摄影机。
视角控制对话框
此对话框使您拥有更改或设置Jack图形窗口的特定的视图参数的选项,你可以用图标选择特定的图形窗口。
Camera Position and Orientation(摄影机的位置和方向)
(Command: View?View Control)
图形窗口中的摄影及位置被定义在一个全局载体上,在文本输入对话框你可以编辑此向量在XYZ轴的大小和方向。
Camera Field of View (摄影机视野)
(Command: View?View Control)
Jack用视野角度定义图形窗口中的视角,这个角度衡量的视锥水平和垂直尺寸,你可以通过在输入框中编辑参数改变视野。
设置为40X40度和100×100度视野
注意:请不要用视野作为缩放物体的手段,极端的角度查看命令可以变得难以操纵,此外,降低视野将不会创建一个二维窗口的效果,为此,Jack有为此目的的二维窗口,这将会在后面陈述。
Snapping and Attaching View(捕捉和附加视野)
(Command: View?View Control)
捕捉视野是一种控制对准场景中物体的摄影机的焦点的方便的方法,在弹出菜单中的单元功能具有同样的效果。
附加一个摄像机允许其对准场景中的一个物体,由于它再环境中移动,所以它将相对于物体保持一个固定的相对位置,当视野连接到一个网站上时候,这个摄像机将会从网站下方进行拍摄。
附加一个摄像机视角对于创造一个人眼的视角是非常有用的,网站与Z轴指入(或者指出)顶部已经存在于眉头(两眼之间)和双眼中,我们将在下节了解更多。
Named Views (命名视角)
(Command: View?Named Views)
经常使用的视角可以被保存以便以后你可以很容易的在特定位置定位摄影机,这个视野可以再本环境中使用也可以再其他你正在使用的环境中使用,这对于为了演示材料而捕捉图像很有用。
视角命名窗口
Window Parameters(窗口参数)
控制Jack的视野是有效的交互使用你的最终生产能力的关键,本届涵盖了一些先进的浏览和窗口管理操作允许你定制你看Jack中场景的方式,透视和正交视野可以再创建窗口选项中选择,用户个可以同时使用任意数目的透视和正交视图。Create Windows (创建窗口)
(Command: View?Create Windows)
由于你在Jack中进行的大多数工作都会涉及到图形窗口中的互动反馈,因此Jack 提供了可以创建和观察多视图的功能。
Window Sets (窗口设置)
(Command: View?Window Sets)
这个命令将会安排窗口显示中的Jack环境的显示方式:全屏(默认的)、4页显示、两页显示/垂直、2+1页显示/垂直、2+1页显示/水平。
4页平铺-1透视3正交
注:在2D窗口中不能旋转,放大和缩小是控制视图的唯一方式。
Current Windows (当前窗口)
(Command: View?Current Windows)
这个命令允许您选择显示设置窗口作为当前工作的窗口。
Stereo Properties (立体属性)
(Command: View?Stereo Properties)
你可以通过最新的虚拟现实技术是你沉浸在Jack的光影环境中,你可以用3D眼睛或者头盔显示器,CyberGlove或者全身运动跟踪,这个命令允许用户设置的立体视窗参数。
Object Hierarchy (对象层次结构)
(Command: View?Object Hierarchy)
对象层次结构提供了另一种可以明显看出不同图形与其零部件之间的关系的场景视角,它可以展开或折叠,以帮助查看当前场景的基本结构。
它最初包含当前环境下的所有图形,这些个人图形可以扩展使用到他们的分段和关节中,个别部分可扩展访问到他们的站点,最后,各个关节可以扩大显示到段与站点的组合。
对象层次结构窗口
对象层次结构可以通过选择物体,或者在上面单机右键的弹出菜单选择,这对于你想操作你只知道你想操作的对象的名称但是不知道操作对象位置的对象是很有用的功能。
对象层次结构
Toggle Log Windows (切换日志窗口)
(Command: View?Toggle Log Window)
此命令将切换显示的Jack日志文件。
Toolbars (工具栏)
(Command: View?Toolbars)
这个命令允许用户自定义显示在工具栏中的图标。
第五章人物操作
由前面章节可知,Jack的人物图形是建立模型的基本要素,但是,Jack的人物图形的处理比你处理其他任何一点都更加复杂,Jack的人物模型包括71个分段、69个关节和135个自由度,最重要的是,行为和约束在模型中起着重要作用,使其能自动控制逼真的人类反应,虽然本章只介绍了杰克的人物图形,它可能是在这个过程中最重要的。
Jack和Jill人物图形
Version Figures(版本图形)
在此版本中,你会发现完全修订的人物,其中包括服装,鞋和吉尔的新发型,这有两种图形变形,基本的男性和女性,一是穿着外套的,一是穿着完整的包括鞋子、裤子、衬衫。
着装图形被设置为默认图形,可以通过点击男性/女性默认图标创建模型。
工具栏:
基本图形可以从人体程序库中找到:Human-> Create -> Human from Library
如果你想改变模型的皮肤、头发、或者衣服的颜色、可以通过右键点击Jack环境中的人体模型,选择属性然后选择其中的材质标签,从列表中选择你想改变的项目,然后单击属性键弹出调色板。
Smooth Skin Figures(光滑皮肤图形)
随着版本的发行,光滑皮肤模型被推出,更新的图形提供了全新的代表人物形状的方法,用网格代表人物皮肤几何,与使用不变形部分的旧图形形成了鲜明的对比,这图形提供了更好的视觉保真度,并设置了更先进的功能,包括了极端的提醒和着装,骨骼系统与分割图形几乎是相同的,虽然肩部锁骨??的位置已被更改,以更好地模仿自然肩运动,为了图形的皮肤平滑,肩膀锁骨的位置已经横向降低和移动了,注意,新的联合锁骨关节位置不与锁骨的解剖位置相符,而是放置的位置,最佳观测到的运动学模型组成的肩膀部位。
Human Hands(人体模型的手)
随着版本的发布,我们推出了一个新的手模型,这个手已经被列为默认的手模型。手的特点是通过改进的几何模型表示,指甲具有更大的视觉保真度,为了满足拇指转动以便更好地抓取物体的需要,手模型加入了一个额外的自由度。
Disembodied Hands (无形的手)
(Command: Object -> Create -> Figure from Library)
有时,我们把整个身体的姿势比作一个无形的手,因此,无形的手已经被引入,可从图库加载。
新图形上的手都有同样的人体测量学数据,你可以用手型对话框控制手的姿势。
请注意,目前不能改变这些无形的手体位。
Human Scaling (Anthropometry) 人体缩放(体位)
杰克的最强大的功能之一是能够准确地扩展人体的图形,这使您可以设计各种各样的人,而不需要原型和参考模型,而且创造出的人体模型是单独的。
第95 第50 第5百分位的身材
Jack的体位是很有用的,因为它可以通过联机快速的模拟人体尺寸,你可以建立一个环境,创造人体的图形和定义环境的制约,然后修改人形的测量,你不必重新做各种不同规模的分析,这么做可以使你通过覆盖面广的人体百分位模型快速模拟人体模型。
Jack的默认人体数据库是ANSUR 1988人体数据库,每个连接长度和骨骼尺寸如头和脚之间的广度回归于用户指定的身材,Jack的肉质尺寸如腹部深度和手臂尺寸回归于身高和体重,在下面讨论的无论是基础的还是先进的比例排布方法都用这种回归方法。
Jack中的人体数据库是:
①NHANES的:从国家健康与营养调查的人体测量数据。(1990)
② CDN_LF_97 :加拿大陆军的人体测量数据(1997 )
③ NA_Auto :代表北美汽车劳动人口的人体测量数据。
④中国代表18-60 (男)和18-55 (女)岁的中国成年人人体测量数据。基于以下报告[ GB
10000-88 ] ,1989 。
⑤亚洲印度的人体测量数据库:对于印度的人体测量尺寸符合人体工程学的设计实践,艾哈迈
达巴德国家设计学院 - 1997
⑦德国人体测量数据库: DIN 33402 :德国工业标准, 2008年3月
版本图形数据
版本中的人体尺度方法已经得到增强,以更好地代表各种体型,具体来说,你会发现另外一个新滑块缩放对话框。这个滑杆允许你修改你的身材体重分布设置的腰臀围比(WHR)。
下面所示的是更新的缩放对话框:
为了测量腰围和臀围比,它一般推荐你测量腰部最小的部分和臀部上臀部最大的部分,用这些数据相除得到腰臀比,然而,有时有的人有很大的腰腹,腰围应选择腹部周围最大的部分。
计算示例:
腰围:33英尺
臀围:47英尺
腰臀比=33/47=
版本的注意事项:
①腰臀比只有版本的图形尺寸才有效,其他的图形尺寸将仍沿用以前的Jack版本的尺寸评估
方法,这是为了确保使用以前的图形的工作流不会中断。
②你第一次缩放的图形时你可能会发现在你初始化基础数据的时候有一点轻微的延迟,随后
这一图形再执行缩放时就会立刻完成,用以前的图形加载环境时也会有轻微的延迟。
③如果您使用的是低内存机器,那么在你在尺寸检查复选框System Defaults->UI dialog
检查人体测量学尺寸时尽量减少内存消耗,只检查脚印尺寸操作将会减少内存消耗。
CREAT(创建)
(Command: Human?Create)
创建男性女性图标
Basic(基础)
(Command: Human?Create?Custom)
建立创建人体对话框,它允许用户创建自定义人体模型,通过默认的创建人体模型面板用户可以创建指定身高和体重的男性或女性模型,即使是孩子的身高和体总,你也可以选择你想使用扩展你的身材人体数据库。
人体尺寸图标
基本的人体尺寸面板,使你可以基于传统的或者百分位数字的身高和体重创建人体模型,统计
算法用于测量其他的人体尺寸和建立人体模型。
基本人体尺寸对话框(上)和光滑皮肤图形(下)
Advanced(高级)
(Command: Human?Create?Custom?Advanced Scaling)
高级比例面板允许使用者通过制定人体测量数据分段控制人体尺寸。
当使用分段数据时,JACK也允许你模拟任何的人体尺寸而不只是“第五”、“第95”百分位模型,高级人体比例面板允许你使用特定的人体尺寸创建人体模型。Jack’s Anthropometric Dimensions(Jack的人体测量尺寸)
Stature(身材) Head Breadth(头宽)
Abdominal Depth(腹部深度) Foot Breadth(脚宽)
Ankle Height(脚踝高度) Hip Breadth(髋宽)
Acromion Height(肩峰高度) Interpupil Distance(瞳距)
Arm Length(手臂长度) Shoulder Elbow Length(肩肘部长度)Biacromial Breadth(肩宽度) Sitting Acromial Height(坐姿肩峰高度)
Bideltoid Breadth(双三角肌宽度) Sitting Eye Height(坐姿眼睛高度)Buttock Knee Length(臀膝长度) Seated Height(坐高)
Elbow Rest Height(手肘休息高度) Sitting Knee Height(坐膝高)
Elbow-Fingertip(手肘到指尖距) Length Thigh Clearance(大腿间隙长度)Foot Length(脚长) Thumbtip Reach(拇指段)
Hand Breadth(手宽) Head Height(头宽)
Hand Length(手长) Head Length(头长)
高级尺寸对话框
(仅限于分段人体数据)
除了创建和定形模型,面板还提供了测量模型的功能,当一个模型被选中,这个模型的人体测
量数据就会在面板上显示出来。
注:用预定义的身高和体重定义多元尺寸时,第一步就先要确定身高体重的比例,然后再用高
级比例对话框确定其他尺寸。
Human Copy(人体拷贝)
(Command: Human ??Copy or RMB on Figure ??Copy)
大部分时候用户需要快速复制姿势,人体测量学参数或者逐一指定特定的参数,例如,你想测试不同尺寸的个体到达同一位置,人体拷贝功能满足这些需要。
人体拷贝对话框
源区域和目标区域允许你选择场景中特定的人体模型。
如果copy posture(复制姿势)复选框被选中,许多相关的选项变得可用,无论是关节基本角还是基本目标都可以被使用。
Joint Angle based(关节基本角)
通过这种方法关节姿势数据从源模型复制到目标人体模型。
目标人类将被限制固定在当前的位置和方向,然而,如果Copy location(复制位置)复选框被选中,目标图形将会被移动到与源图形相同的网格位置。
Goal based(基本目标)
用这种方法要特别注意手、脚和凝视位置,这种模式对源模型和目标模型之间有不同的人体测量尺寸时特别有用,还有从源模型复制关节角到目标模型的功能,然后试着移动手和脚的位置来匹配源模型,他还试图使目标模型与源模型有相同的凝视区域。
请注意,此选项始终假定的源和目标数据的位置是相同的。
Copy anthropometric properties(拷贝人体测量属性)
此选项将复制人体尺寸从源到目标图。
请注意,如果源和目标的数字是不同性别,那么选项不可用。
Copy Loads and Weights(复制载荷和重量)
如果载荷和重量定义在源模型上,那么这个选项变为可用,那么将允许你将这些数据定义到目标图形上。
老版人体模型和之间复制的注意事项:
它一般不建议你使用不同图形版本之间的人体测量学的人体拷贝,但是,如果你试着进行这样的复制,下面的复制规则将适用:
复制源复制目标图形间将被复制的人体测量尺寸版本穿着版本穿着所有
以上版本默认分部版本穿着连接长度
以上版本默认分部以上版本默认分部所有
版本穿着以上版本默认不支持
版本穿着以上版本分部连接长度
Properties(属性)
(Command: Human?Properties)
Jack中,人体模型除了有自己的预定义的网格、段、关节、约束外,其余的和其它类型图形都是一样的,这有特殊的方法操作他们还有描述他们的运动,对话框中的属性选项就像其它图形一样将会在下章进行讨论。
图形属性对话框
Postures(姿势)
(Command: Human?Properties??Postures)
人体模型有很多关节,除了简单的保存、储藏、重复使用外,为每个新模型模拟一些关节位置和摆好姿势是很困难也很费时的。Jack中有很多保存整体姿势和像手势一样的部分身体姿势的方法。
Posture Library(姿势库)
姿势库包含整个身体姿势来设置常用的工作位置,关节角度和行为在姿势被激活时会显示在人体模型上,因此,当你在环境中放置人体模型时都已它们开始。
保存的人体姿势
Skeleton (骨架)
(Command: Human ?Properties?Display Tab)
有关节的图形都可显示出潜在的联动结构,具体来说就是显示这些关节的位置和分部情况。
人体骨架视角
注:人形透明或线框将让你更清楚地查看骨架。
Anthro(人体)
这个标签只适合人体模型,它可以让你查看任何以保存的其他人体模型。
Human Control (人体控制)
(Command: Human?Human Control)
用ADJUST JOINT DIALOG(调整关节对话框)调整每个人体的关节和人体分部来控制人体姿势会很乏味,在本节中,你将学到更简单的控制人体姿势和人体行为的方法。
Human Control dialog(人体控制对话框)可以从Human(人体)菜单中的Human Control(人体控制)菜单中进入或者选择工具栏中的人体控制图标,此对话框允许用户从每个对话面板中设置人体行为和操作人体模型,人体操作选项可以从人体控制对话框的右侧访问,这些选项允许您以交互的方式操作人体模型,人体行为可以从面板左边访问,这些行为定义了人体对于环境中其他物体的你想要的反应。
值得注意的是,在这个对话框中的设置都会立即应用到人体模型中使他们发生改变,这使您可以快速浏览所有的行为参数,查看或更改所需的设置,还要注意操作选项,有一个“开始”按钮,点击后你选择的操作模式将会被激活,然而,如果您使用Escape键结束互动,你将不得不重新选择“开始”按钮启动与所选线段的另一个互动。
注:使用人体控制面板对多个关节操作,用Adjust Joint dialog(调整关节对话框)对单个关节进行操作。
人体控制对话框
注:如果从姿态库选定新的姿态应用,所有约束(行为)将被重置。
Human Control Manipulations(人体控制操作)
手臂
当你启动手臂操作时,你将自动从手心网格位置开始移动,最后的效应在手掌,最开始移动的关节默认是肩膀,手臂为了到达这个目标网格也会进行调整,腰关节也可被设置为开始关键,允许躯干运动,选中腰部为开始关节这些就会执行。
注:手臂移动被显示在他可及的范围内
手臂行为允许你为手添加约束选项,默认情况下,手不限制在任何特定的位置有几个目标位置的选项可以定义,包括全局定位,抓取场景中的相关物体,选择指定网格上的图形或者物品。你也可以通过操作肘部来定位手臂,这个以依赖或不依赖手臂行为进行操作。
脚
除了平衡的影响,脚操作和手臂操作非常相似,当平衡行为启动时,图形自动调整他的重心来保持平衡,。这种行为是在下面更详细地讨论。脚膝盖的位置,也可以独立调整。
重心和体心
重心操作以显示目标位置的重心网格开始,人体图形支持的基础是在地面上显示多边形,一条自图形重心到地板的垂线也会被显示出来。
当图形的重心投影落在他的支撑物底部的重心与几何中心之间,以绿色标记,当图形的重心落在两者之外以红色标记。
骨盆操作是旋转躯干的下部,此旋转效果依赖于平衡行为和躯干的行为,如果躯干保持垂直对齐,旋转骨盆会导致臀部蜷缩在身下,如果躯干不被限制,旋转骨盆类似于弯曲躯干。
头和眼睛
头和眼睛的操作以空间里的一个焦点开始,当‘Move Head’被选中时,脖子将会自动旋转以对准焦点,当‘Move Eyes’被选中时,眼睛将会随着焦点在空间中转动,头部和眼睛操作都有两个设置,一个是放松一个是注视。
‘fixate(注视)’这个选项在头或者眼睛与网格或者接点之间设置一个视角约束,除了单独的头部和眼睛的行为之外,有一个头眼的联合行为,可以开启或者关闭,这个行为是头和眼睛自然的跟随目标位置移动。
肩部
所有的约束处理让我们回忆起前面章节介绍过的内容,事实上,这些操作时特殊情况下的约束定义,特别是为了人体操作而定义,人体模型也有一些操作是用来进行双关节复合的,这就使得一组具有许多自由度的关节可以被很少的控制操作,这还确保Jack使得人物模型的关节像真人一样自然的移动,出于这个原因,ADJUST JOINT DIALOG(调整关节对话框)不能用来单独调整肩膀锁骨的复合关节,你会注意到,如果你使用这种对话框,会自动切换到Human Control 面板。
如上所述,肩膀操作使用关节滑块来调整复合关节,注意上臂和锁骨的移动,肩膀是双关节的复合,通过锁骨连接的躯干和上臂构成一个整体使得可以用三个数字定义5个自由度。
躯干
躯干操作与肩膀操作类似,躯干图形可以前后弯曲,也可以旋转还可以侧身弯曲,注意,弯曲从腰部开始,指定的位置越极端,更多的近端关节被用来弯曲脊柱,就像肩膀脊椎是一对复合关节一样,三个滑块操作所有17个脊柱分节,独立的脊柱分部操作可以通过ADJUST JOINT DIALOG来完成,但是这种脊柱调整方法只会在极少数情况下使用。
平衡行为
当Step Balance Control(步幅平衡控制)开启时,任何使身体重心改变的操作会使腿和骨盆移动来保证重心在两脚之间,这就是“follow feet”平衡控制,直接操作重心移动到目标位置要涉及到支撑物的几何图形。
然而,这并不总是你想要的特征,例如,在坐着操作时,你并不想要图形平衡自身,从控制面板的行为一边你可以控制这样的行为,平衡控制允许你开启或者关闭这个动作。
Adjust Joint (调整关节)
(Command: Human?Adjust Joint)
Jack提供一个简单尔强大的方式来定义有关节的图形并通过操作关节变换来控制图形姿势,关节的角度与/或位移决定图形的姿势,这些关节的角度可以从Jack中
的Human>Adjust Joint菜单操作,或者点击工具栏上的图标,Jack中的关节具有和人体一样的关节自由度,一个是围绕特定轴旋转的自由度,这种旋转描述了关节连接的两个网格的相对方向。
Footprints (脚印)
(Command: Human?Footprints)
Human菜单中的这个功能使得人手脚操作和谐,是一种替代人体的控制面板接口,用Footprints对话框使得图形经由手脚被控制。
人体的手和脚被约束到这些图形中,使得图形移动,人体就会跟着移动,这对话框也提供了Human Control对话框的一些功能,除了姿势,脚印的效用对动画非常有用,不像特定的人体姿势,手和脚可以动起来,然后人物图形也会随之移动,如果人体的特定姿势被使用,手和脚图形会附加到网格上的手和脚上,在姿势使用期间。
Eye View (眼睛视野)
(Command: Human?Eye View)
EYE VIEW DIALOG(眼睛视野对话框)可以被用来创建你人物的第一人称视角,这就会使你看见你的人体模型看见的东西,你可以在新窗口或者再现有的窗口创建眼睛视野,眼睛视野可以创建额头或者双眼或者左眼或右眼。
眼睛视野对话框
注意,你可以控制那个窗口的人体模型有眼睛视野,创建新的眼睛视野窗口的菜单也可以从单击鼠标右键的弹出的人物图形菜单中选择。
注:眼睛视野窗口是通过头部移动控制的。
两眼之间的视野窗口
View Cones(视野锥)
(Command: Human?View Cones)
视野锥是眼睛视野窗口的图形扩展,这些椎体从模型眼睛发出,展示出人物潜在的可视范围,视野锥其实是代表人体模型眼睛可是角度的透明椎体,默认的视野锥角是40°,这是定位关键物体的理想视角。
视野锥
Posture Hand (手势)
(Command: Human?Posture Hand)
手势库是人体姿势库的子数据库,它包含了常见的手势,可以在Jack场景中用于抓取和触碰物体,“开始到结束百分率”允许你简单的模仿两个已选择手势之间的手势,因此你可以非常精确地摆出手势,并最大限度的减少达到你想要的最终手势的手动操作。
手势示例
手势库
Automatic Grasp (自动抓取)
(Command: Human?Grasp)
Jack可以通过选择特定部分或者整个图形来自动抓取对象,这个命令使得Jack的手指不停紧握直到触碰到物体。
该功能的工作原理是定位待抓取物体附近的手或者定位物体到人体的手掌,然后Jack逐步紧握手指,并实时监控数据间的碰撞,这个命令需要你指定抓取物体,需要用的手以及抓取的方式。
抓取之前的手
抓取之后的手
第六章创建和显示对象
Jack用一个简单的多边形几何格式代表场景中的对象,所有的物体都被组成平面的表面几何形状代表,面是指由三个或更多节点连接在一起,节点是简单地在空间中的点,面上连接两个节点的线称为边。
请注意,杰克并不需要复杂的数学表示的曲面或实体,这简化了几何图形转化成Jack实体。Create (创建)
(Command: Object?Create)
实体创建命令将允许您创建网格,关节,节点,面等。
Site (网格)
(Command: Object?Create?Create Site)
此对话框指定以段为基础的网格的位置。
Joint (关节)
(Command: Object?Create?Create Joint)
在次对话框中,允许用户建立选择两个段或者网格,一个固定,一个移动来创建它们之间的关节。
Node (节点)
(Command: Object?Create?Create Node)
此对话框允许用户创建,移动,或删除一个节点。
Face
(Command: Object?Create?Create Face)
此对话框允许用户移动,创建,删除,扭转,或修复面。
Light (光)
(Command: Object?Create?Create Light)
使用Jack时,一个设计师或者工程师的工作大部分是根据分析结果写报告、设计审核、连接局域网、分析结果文件化甚至是市场化,Jack提供许多选项来控制在环境里展示什么,这些选项更多的不仅仅是美化视觉效果,还是对象不可见来时视野开阔,也是突出感兴趣的对象。
创建光
Jack提供了一个灵活的照明和显示模式,它允许您设置对象的颜色,渲染和显示模式,修改光的颜色,移动光,对照实体间的纹理,甚至是动画化灯光,上色和视觉缩放效果趣味化。
你可以在LIGHT PROPERTY DIALOG(光属性对话框)中创建不同颜色、不同强度的光,你可以像移动其他物体一样移动光图标。
注:Jack中的灯是点光源,因此没有方向。
光源和球体
CAD Objects (CAD实体)
(Command: O BJECT?C REATE?CAD O BJECT)
在Jack中你可以创建基本的CAD图元,用CREATE CAD OBJECT来创建一般的实体如球形,椭球体,圆锥体,圆柱体,空心圆柱,磁环,和齿轮。
创建CAD实体对话框
Rectangular Solid (矩形固体)
(Command: O BJECT?C REATE?R ECTANGULAR S OLID)
使用CREATE RECTANGULAR SOLID来创建基本立方体
Figure from Library (库图形)
(Command: O BJECT?C REATE?F IGURE FROM L IBRARY)
其他的Jack库对象
OBJECT LIBRARY(实体库)是使经常使用的文件可以很容易被访问的有用的方式,你可以用OBJECT LIBRARY建立一个你经常使用的实体仓库,除此之外,在默认情况下,许多有用的实体的实体也包含在实体库中,这些包括组成Jack分配的实体部分。
Factory Equipment Library(工厂设备库)
实体库中还包括了许多工厂设备供你建立工厂实体模型或者工厂工作单元。
把这些加载到场景中使用Object->Create->Figure命令,来建立加载库文件对话框,工厂设备文件在你单击库列表中的Factory Equipment选项后可以以列表形式显示出来。
设备类型包括:
① A sheet metal bender (金属弯管机表)
② A control computer (控制电脑)
③Conveyor belts (输送带)
④Elevators(电梯)
⑤ A fixture (夹具)
⑥ A motor (马达)
华南牌JA缝纫机使用说明
华南牌J A 2一一l型家、用缝纫机 荣获全国轻工业优质产品奖 我公司生产之华南牌和飞鸽牌缝纫机.始创于一九三七年,生产历史悠久.驰名中外,本公司实行科学技术管理和全面质量管理体系.近年 来,还引进了国外的先进技术设备使产品不断创,新。我公司生产的缝纫机种类繁多,有适用于家庭使用的JA2-1型缝缝纫机、JA 2-2型缝 纫机、J A 4—一l型缝纫机、J H 7—2型电动多能缝纫杌;有适用于服装行业使用的GC10-1型高速平缝机FN11-1型三线包缝机GY1-1型园 头锁眼机和GI1-2型花针机等。全部产品选用优质材料,经过科学处理,造型美观,结构精密,性能优良,坚固耐用,每台出厂的缝纫 机均经严密检验,保证品质优良。一九八一年,我公司成产的华南牌JA2-1型家用缝纫机荣获全国轻工业优质产品和广东省优质产品光荣称号 在实现四化的征途中,我们将生产更多,更好的缝纫机,以满足国内外市场的需要,欢迎客商用户选购。 本公司精诚为您服务! 华南缝纫机工业公司产品简介 本公司是生产各种类型缝纫机专业化公司,前身广州市冠星衣车行始创于1931年,后为华南缝纫机厂,建厂至今已有半个世纪,历史悠久,驰名中外。 自1937年首创第一台缝纫机以来,从生产单一的JA型家用缝纫机至今先后试制和生产了可用脚踏、手摇、电动作传动的,各种家用缝纫机和具有多种功能的多能机,以及各种专用的重力机、缝鞋机、平缝机、包缝机、锁眼机、花针机等多种工业缝纫机,根据国内外 用户不同需要,用“华南牌”或“飞鸽牌”两种商标,质量性能完全相同,请放心选用。《华南牌》《飞鸽牌》各种类型的缝纫机,适用于缝制各种厚薄的棉麻、丝绸、人造纤维、针织品、呢绒等缝料及皮革、人造革、草席制品等,配上卷边压脚、绣花针扳、车花器、锁眼器等缝纫机附件,则能从事卷边、织补、绣花、镶嵌花边、打摺、锁钮眼等作业。用途广泛、造型美观、结构精密、性能良好、坚固耐用,适合家庭缝纫各种服装及及皮革、针织等行业之用。五十多年来所生产的各种类型缝纫机。深受客商用户之欢迎,除供应国内市场外,还远销亚洲、中东、欧洲、拉丁美洲等七十八个国家和和地区,在国内外市场均享有较高的信誉。
人机工效管理制度
人机工效管理制度(07) (一)总则 根据《中华人民共和国安全生产法》、《劳动法》、《职业病防治法》有关规定,为有效预防、控制和消除职业病危害,防治职业病,保护我公司职工的健康及相关权益,特制定本制度。 (二)适应范围 本制度适应于公司所属各单位、所有员工。 (三)定义 工效学是根据人的心理、生理和身体结构等因素,研究人、机械、环境相互间的合理关系,以保证人们安全、健康、舒适地工作,并取得满意的工作效果的机械工程分支学科。人机工效学用科学的数据把对工作场所硬件系统的设计与人的体力、体形以及表现联系起来。通常,人机工效学设计侧重在对工具、设备及工作场所进行设计,使得作业更能够与人相适应,而不是要求人适应这些因素。 (四)职责 1.行政人事处负责工效学方面培训。 2.行政人事处每年要对全公司的人机工效管理进行一次检查。 3.公司各部门应向员工宣传、落实本制度。 (五)细则 1.人工搬运 1.1人工搬运原则
1.1.1省力化原则。能往下则不往上、能直行则不拐弯、能用机械则不用人力、能水平则不要上斜、能滑动则不摩擦、能连续则不间断、能集装则不分散。 1.1.2顺畅化原则。人工进行货物搬运,要有合理的通道,脚下不能有障碍物,头顶留有空间,不能人撞人,人挤人;用手推车搬运货物,地面不能坑坑洼洼,不应有电线、工具等杂物影响小车行走;人工操作电葫芦吊车,地面防滑、行走通道两侧的障碍等问题均与作业顺畅与否相关。 1.1.3短距化原则。短距化,即以最短的距离完成装卸搬运作业,减少人的体力消耗,大幅度提高作业效率。 1.1.4人格化原则。要考虑人的因素和尊重人格,不允许野蛮装卸、乱扔乱摔现象。搬运的东西在包装和捆包时要考虑人的正常能力和抓拿的方便性,也要注重安全性和防污染性等。 2.注意事项 2.1准备搬运时,先走近物体,双脚分开(约与肩宽)。 2.2背部需要保持垂直,身子蹲下; 2.3应用手掌握紧物件,避免用手指抓住物件,以免物体滑脱; 2.4将物体靠近身体,借助双脚的力量,将物体提起,而不是借助腰力; 2.5若要搬运过重或过大的物品,应利用机械搬运; 2.6若要将物品放于相当的高度,最好两人合作进行。
人机工效设计和分析 课程设计
人机工效设计和分析课程设计 设计课题专业课教室桌椅的人机功效设计和分析 班级工业设计硕研16级 姓名李航 指导教师王晓娜 日期2017年1月3日 山东科技大学
目录 一、前言 (3) 二、目的和要求 (3) 三、任务 (3) 四、内容 (4) 1.1人类功效学的研究方法 (4) 1.2分析对象——人类工作状况分析 (4) 1.3动作和姿势 (4) 2.1办公室人机功效风险因素 (6) 2.1.1动作及受力分析 (6) 2.1.2工作效率分析 (8) 2.1.3安全与健康分析 (9) 2.1.4疲劳与事故分析 (11) 2.1.5易损关节大体解剖 (12) 3.1生理及心理需求分析 (14) 3.1.1人是“人——机——环境”系统中的重要环节 (14) 3.1.2人体感觉通道 (15) 3.1.3人体视觉及其特征 (15) 3.1.4视觉系统的生理构造及成像原理 (15) 3.1.5听觉系统的生理构造 (16) 3.1.6人体心理与感知行为系统 (16) 4.1人与系统的可靠性分析 (17) 4.1.1人机系统的整合问题 (17) 4.1.2设备人机尺寸分析 (18) 4.1.3设备布局分析 (20) 4.1.4物理环境分析 (21) 5.1设计改进 (24)
一、前言 办公室一族包括机关工作人员、科研人员、白领阶层等,他们在我国社会经济发展中起着重要作用,是建设社会主义的中坚力量。长期坐办公室的人员由于长期接触办公桌椅、电脑,保持着一种姿势,如果办公室桌椅设计不当,会导致他们在使用过程中肌肉骨骼长期处于紧张状态,容易造成颈椎病、肩周炎、腰肌劳损、手腕病等,对他们的身体造成了极大伤害。据统计,成年人颈椎病和腰椎病的发病率已达到60%左右,而办公室职员中的发病率更高达90%以上。因此,为这个特殊群体创造一个更适合他们的环境显得尤为重要。 二、目的和要求 1、运用“人机工程学”课中所学的知识,研究人与系统中各因素之间的相互作用; 2、应用相关理论、原理、数据和方法来设计以达到优化人类和系统效能的目标; 3、具备撰写人机工程设计和分析说明书和配图说明等书面方式呈现设计结果的能力; 4、能够就方案设计和改进进行总结概括,能够清晰表达观点; 5、能够在设计过程中搜罗信息、集思广益、理论联系实际,对方案进行最优化处理。 三、任务 1、完成对工作人员的工作状况分析 2、完成人与系统的可靠性分析 3、完成设备人机尺寸分析 4、完成物理环境分析(照明环境、噪声环境、振动等) 5、对影响人机功效的问题进行设计改进 6、编写设计报告书
人机工程案例分析3篇
人机工程案例分析3篇 人机工程案例分析·1 1人机工程学(Ergonomics) 日本称为“人间工学”,或采用欧洲的名称,音译为“Ergonomics”,俄文音译名“Эргнотика”在我国, 所用名称也各不相同,有“人类工程学”、“人体工程学”、 “工效学”、“机器设备利用学”和“人机工程学”等。为便于 学科发展,统一名称很有必要,现在大部分人称其为“人机工程学”,简称“人机学”。“人机工程学”的确切定义是,把人机环境系统作为研究的基本对象,运用生理学、心理学和其它有关 学科知识,根据人和机器的条件和特点,合理分配人和机器承担 的操作职能,并使之相互适应,从而为人创造出舒适和安全的工 作环境,使工效达到最优的一门综合性学科。 2 人机系统(Man-Machine systems) “人机系统”,就是人和一些机器、装置、工具、用具等为完成某项工作或生产任务所组成的系统。更确切地说,这种系统 还应包括环境条件在内。所以,人机系统实际上是指人机环境组成的一个不可分割的整体。人机系统的范围是很广阔的,有简单的,也有复杂的,如人用铅笔书写,就是一个简单的人机系统;又如船员驾驶轮船,飞行员驾驶飞机,司机开动汽车,就是一些 较复杂的人机系统。在人机系统中,包括人、机器和环境三个
组成部分,而每个组成部分可称为一个分系统或子系统。机器分系统具有控制器和显示器(显示器的种类很多,有视觉的、听觉的,触觉的等)。人,这一分系统在看到(或听到,触到)显示器的显示时,就要决定如何去控制,如何去操作。如果有必要调节时,即可通过人体的动作去进行操纵。整个人机系统是在各种不同的环境里工作。而环境条件又不同程度地影响着各个分系统的工作。可见,在人机系统中,人同机器、环境的关系总是相互作用,相互配合和相互制约的,但人始终起着主导作用。因此,为了能充分地发挥人和机器的作用,使整个人机系统可靠、安全、高效,以及操作方便和舒适,设计人机系统时就得充分考虑人和机器的特征与功能,使之相互协调配合,构成有机整体,达到生产和工作的最佳效果。 3 人机系统设计(Man-Machinesystems design) 人们要完成某项工作或生产任务,就需要一定的机器或装置,但是有些机器或装置适合人的生理机能和心理特征,人们工作起来就感到舒适和省力,效率高而且安全。而有些则不是这样。所以,在设计机器或装置时,要尽可能考虑人体的机能和人的心理特征,力求在人操纵机器时所接触的部位尽量符合人体的各种因素。须使人体骨架结构能够适应它,肌肉组织能够操纵它,精神系统能够控制它。同时,还须在使用这些机器或装置时,保证人体安全。如果这些目标达不到,那么,人们所有期望的结果事故就很可能发生。人机工程学的这一基本思想是设计机
缝纫机说明书
二、FA2-1型缝纫机的特点 该缝纫机分为五斗式枱板缝纫机及一头藏式枱板缝纫机(见图2、3、4)。全台缝纫机 习惯分为机头、枱板、机架三大部件。该型缝纫机系集中集中家用缝纫机之优点及老小四四特点而制造的。其具有以下特点: (1)装有正车器(倒轮闸),无论怎样踏动机器,上轮只能正转,不能倒转,如果踏错了,上轮要倒转时,正车器马上把机器停住,避免了断线、夹线、断针等现象(图 1 )。安装时使正车器胶皮对正下带轮的皮带槽,然后将内外螺母锁紧(先别锁死),调 整丝杆倾斜角度,至下带轮不能倒转时将内外螺母锁死(垫圈加在边角外面螺母的下方,避免漆皮划坏)。 (2)带抗压子(靠脚)而且还能将机头卧入斗内(能箱下),即能装在各种藏式枱板上,除操作方便外,并能防止磕碰、防尘、便于保管。 (3)能吃厚,缝厚保24层,可达32层白市布,并可缝棉活、鞋帮、呢绒、布、绸缎、能卷边、绣花。不但适用于三北(东北、西北、华北)寒冷地区缝制厚棉活,而且还能缝制薄活,不断线,不跳线,针迹均匀整齐。 (4)为使送活力大,保证吃厚,将一般家用缝纫机的滑块送布机构、小送布牙、小压脚,改为连杆送布机构、双牙子、大压脚,使送布机构使用耐久,力量大,以缝制厚活之用。 (5)一般家用缝纫机下带轮小,缝纫速度慢,而改性缝纫机,下带轮加大,运转速度快,以适应服装行业之需要。 (6)短针杆加上套筒(闷挺)使用耐久: (7)长针杆无上套筒的缝纫机,针杆直接与车壳摩擦,缝纫机的使用寿命降低,为克服此缺点,该型缝纫机采用了短针杆加上套筒,针杆直接与上套筒摩擦,磨损后可调换上套筒,延长车壳的使用寿命,保证缝纫机经久耐用。 (8)采用活梭床便于清理和装卸: (9)使梭床内经常清洁,运转灵活,保证良好的缝纫性能,就要经常擦拭梭床内部,装卸摆梭,死梭床尤为不便;而活梭床只要搬动压圈扳手,就可将摆梭取出,擦拭内部,节省时间便于维护。 (10)可以倒顺走针,以便往返重复缝纫。 (11)装有自动绕线器,绕线灵活、耐用。 (12)此自动绕线器的绕线导板、绕线轴架内装有弹簧,由于弹簧作用,绕线胶圈磨损后仍能紧压在上轮上,使绕线轴旋转,这是一般需用螺丝调整的绕线器所不及的,比老小四四用手托着绕线更为优越。 三、整机安装(各部名称见附图) (一)机架的安装: 1. 用边角螺丝将方架与两个边角紧固在一起,螺丝下应加垫圈。 2. 将下带轮装在方架上,调整方架顶尖螺丝,使下带轮运转灵活,又不晃动时,用起子(改 锥)定住方架顶尖螺丝,用扳子旋紧方架顶尖螺母。 3. 将踏板安装在方架上,调整方架顶尖螺丝,使下连杆轴心通过踏板右上角的摇杆球接头孔
缝纫机使用方法
家用手动缝纫机使用办法 PS:这个缝纫机有不少买家反映会跳线的情况,解决这个问题,就是调整针的位置,用螺丝刀把针的位置慢慢往下调整,直到不会跳线为止,这样就可以解决跳线的问题。 您还可以这样,把有spring come的那个塑料外壳取下来,就能看到一个类似于小鸟嘴样的东西,那个就是钩线器,然后机器上不用放任何东西,直接按缝纫机,按压慢一点,深一点,就能看到钩线器是如何工作的,原则上此款缝纫机缝制布料的厚度不能超过0.8MM。(跳线的意思就是缝出一根线。机器的下方,有个钩线的装置,只要线钩到就不会跳线)如下图
名 尺 材 重 颜 介 1持机:用右手四指托住机座,大拇指自然地放在机身上盖顶端,平稳地持住整机。 2、穿线:将线轴上的线轻轻拉出。再穿过引线圈。引过的线头暂放在机针旁边,另将穿线器从机针前面(向机身结合部)穿过机针孔,再将线头引入穿线器小孔中,退出穿线器拉出头线约2-3公分压线板压住即可待用。
3、放布:用右手食指抬起压板,将准备好待缝的织物(厚度不超过1毫米)平整地放入压板下,轻轻放回压板压住织物; 4、缝纫操作:用左手持织物,右手大拇指轻轻地迅速下压上盖顶端压到底后,大拇指再下压,如此反复,送布机构自动将被缝物向左送出。持机右手逐渐右移,左手持布配合缝纫节奏轻轻地将被缝物向左方移动,直至缝纫结束;用剪刀剪断线头,轻轻拉起压板取出织物。从被缝织物反面,拉出最后的一节线头,使它穿进旁边的一节线圈内拉紧并打一个结,针脚就牢固了;缝纫结束时切勿以硬拉织物方式来拉断线头,以免拉坏机针、针脚; 6、本机能自动进布和调节针脚间的松紧,但要注意下列几点很有必要:针脚太紧,将压力螺母稍向逆时针调;针脚太松,将压力螺母稍向顺时针调;系正确的针脚松紧。如需针脚大些,左手拉布可稍快些。如需针脚密一些,左手拉布可稍慢一些; 7、换线团:如换用大线团,可将备用的接长杆与线筒轴连接,套入大线团。把备用的塑料帽置于杆之末端固定大线团,然后重新穿线,调整线的松紧后进行缝制;使用棉线或合成线效果最好。 8、换针:松开固定螺丝,取出断针。所示装上新针,注意要将针的平整面对正固定螺丝,不可装反。袖珍型,手动操作,该缝纫机具有自动进布和调节针脚间的松紧的功能,达到专业效果;产品采用精美彩色礼品包装,除做为理想的家庭日用外,也适合作为礼品及会议赠品等。
人机工效学
人类工效学是研究人在某种工作环境中的解剖学、生理学和心理等方面的各种因素;研究人和机器及环境相互作用;研究在工作中、家庭生活中和休假时怎样统一考虑工作效率、人的健康、安全和舒适等问题的学科。人类工效学又称人机工程学、人类工程学、人体工程学等(以下简称工效学)。 一、在机械安全技术领域进行工效学的研究与检验之间的关系 在机械安全检验中通常是通过评价人、机械、环境相互间的关系是否合理,操作者能否安全、健康、舒适地工作来进一步确认机械的整体安全性。在生产过程中,完成预定任务的是人和机械设备、环境相结合的整体。在对机械设备实施安全检验或进行相关研究时主要考虑的要素都是相同的,但是,进行学术研究时,主要是研究各要素在人-机-环境的体系中所处的地位,如何采取必要的措施,预防和避免事故或危险的发生;而进行安全检验时,主要是评价设计和制造者是否针对特定的人-机-环境系统,对预期估计到的危险采取了有效的、可靠的安全防护措施,使危险消除或降低到可接受的安全裕度之内;是否针对残留危险和如何安全使用机械设备向用户或操作者提供了足够的信息,以保证安全地安装、使用、维护和拆除(见表1): 表1 二、在机械安全检验中主要验证的人类工效学技术指标 1.在机械设备的整体设计中,是否采取了有效的防范措施,有效的制止或防范人为错误的产生 人机系统的正常运行,有赖于人与机器的活动与操作。随着科学技术的进步,机械的可靠性显著提高,而由于人的不确定因素的存在,由操作者的错误行为引发操作事故所占比重也在不断的增大。
人的执行机能具有很大的自由度,不仅能够随时处理意外和异常情况,而且也会由于疲劳、情感、环境等因素的影响出现人为错误。人为错误主要包括以下几种情况:未执行规定的机能;错误执行规定的机能;执行了没有规定的机能;等等。 为避免由于人为错误可能造成的事故,机械设备的设计常采用本质安全、停止运转及保护电器回路等安全保险措施和防止操作失误的装置预防人为错误;在机械安全检验过程中需要通过相关的信息或试验验证这些措施或装置的有效性和可靠性。 2.人机界面设置的合理性和人机交流的顺畅性 人机界面也叫人机接口。显示器和控制器是人机之间的两个界面。机器通过显示器将信息传送给人,人通过控制器将决策和指令信息输送给机器。人机信息交换的效率,很大程度上取决于显示器和控制器分别与人的感知器官、与运动反应器官特性的匹配程度。在实施机械安全检验期间通过对显示器和控制器的物理特性与人的感知、记忆、思维、运动反应等身心特点是否相适应来判断人机界面设置的合理性和人机交流的顺畅性。 在现代复杂的人机系统中,操作人员往往面对着几十甚至几百种不同功用的显示器和控制器,若设计或安排不当,就容易发生误读和误操作而导致重大事故。在机械安全检验中主要通过以下几个个方面来进行验证: ——适宜的信息通道。显示器的设计符合工效学设计原则,信息传递顺畅,有效的避免因信息通道过载而出现错误的信息。 ——当信息从人的运动器官传递给机器时,应适应人的极限能力和操作范围,将控制器设计得高效、安全、可靠、灵敏。 ——充分发挥人和机各自的优势,减少发生危险的概率。 ——人机界面的通道数和传递频率不应超过人的能力,而且适合大多数人的应用。 例如手的界面主要是指与手接触相关的界面,包括按压的界面、旋转的界面、握的界面、捏的界面等。手是操纵各种设备的主要方面,手的界面不合理,会导致多种上肢职业病甚至全身性的伤害,因此,手的界面符合解剖学原则和人类工效学原则,可以使操作者发挥最大效率,同时可以大大地降低职业病产生的概率。 3.工作空间设计的合理性 工作空间也是机械安全检验的重要内容之一,它包括工作空间的大小、显示器和控制器的位置、工作台和座位的尺寸、工具和加工件的安排等。工作空间的设计要适应使用者的人体特征,以保证工作人员能够采取正确的作业姿式,达到减轻疲劳,提高工效。
人机工程技术研究的现状及发展趋势
人机工程技术研究的现状及发展趋势 作者:北京城市学院信息学部刘伟 摘要:本文首先介绍了人机工程学的概念,回顾了人机工程技术国内外的研究状况,指出了人机工程技术研究的应用领域;其次通过对人机界面技术及视觉-目标拾取认知技术研究的规律研究的分析,对当前人机工程技术研究的发展趋势进行了探讨;最后对人机工程技术的应用前景进行了分析。 关键词:人机工程;人机界面;视觉;目标拾取。 一、让技术人性化的科学--人机工程学 1什么是人机工程学 人机工程学是研究“人—机—环境”系统中人、机、环境三大要素之间的关系,为解决系统中人的效能、健康问题提供理论与方法的科学。 人机工程学研究在设计人机系统时如何考虑人的特性和能力,以及人受机器、作业和环境条件的限制。人机工程学还研究人的训练,人机系统设计和开发,以及同人机系统有关的生物学或医学问题。对于这些研究,在美国有人称之为人类工程学“HUMAN ENGINEERING”,人因(素)工程学“HUMAN FACTORS (ENGINEERING)”,在欧洲有人称之为“ERGONOMICS”,生物工艺学,工程心理学,应用实验心理学以及人体状态学等等。日本称之为“人间工学”,我国目前除使用上述名称外,还有译成工效学、宜人学、人体工程学、人机学、运行工程学、机构设备利用学、人机控制学等。人体工程不同的命名已经充分体现了该学科是“人体科学”与“工程技术”的结合,实际上,这一学科就是人体科学,环境科学不断向工程科学渗透和交叉的产物,它是以人体科学中的人类学、生物学、心理学、卫生学、解剖学、生物力学、人体测量学等为“一肢”;以环境科学中的环境保护学、环境医学、环境卫生学、环境心理学、环境监测技术等学科为“另一肢”,而以技术科学中的工业设计、工业经济、系统工程、交通工程、企业管理等学科为“躯干”,形象地构成了本学科的体系,从人机工程学的构成体系来看就是一门综合性的边缘学科,其研究的领域是多方面的,大致包括电话、电传、计算机控制台、数据处理系统、高速公路信号、汽车、航空、航海、现代化医院、环境保护、教育、互联网等,人机工程学甚至可用于大规模社会系统,因此可以说与国民经济的各个部门都有密切的关系。 2人机工程学的国内外发展状况 人机工程技术是21世纪信息领域需要解决的重大课题。美国21世纪信息技术计划中的基础研究内容为4项:软件、人机交互、网络、高性能计算机。其中,人机建模研究在信息技术中被列为与软件技术和计算机技术等并列的六项国家关键技术之一,并被认为“对于计算机工业有着突出的重要性,对其它工业也很重要”。美国国防关键技术计划不仅把人机交互列为软件技术发展的重要内容之一,而且还专门增加了与软件技术并列的人机界面这项内容。日本也提出了FPIEND21计划(Future Personalized Information Environment Development),其目标就是要开发21世纪个性化的信息环境。我国973、S-863、十五计划及未来的十一五计划均将人机交互列为主要内容。
人机工效管理程序
人机工效管理程序 1目的:为杜绝或减少因不良的工作活动而造成对员工健康安全的影响,不断提升员工工作的舒适度,制定本程序。 2范围:公司全体员工 3权责 3.1员工:人机工效学改善建议的提报 3.2人事部:负责收集整理员工的改善建议及测试与实施 4定义: 4.1MSD:即肌肉疲劳综合损伤症。包括肌肉损伤和破裂、韧带扭伤、关节或跟腱发 炎、颈椎盘恶化。但滑倒、摔倒、跌下、机动车辆事故或与这些相同的事故不作为 标准中的MSD。 4.2MSD危险:是指工作中发生的一定数量、频率、持续时间的可能引起的MSD的危 险性因素。 4.3MSD事故:最指与工作有关的MSD,需要除急救外的治疗,或者员工报告的MSD 迹象或者症状持续7天或7天以上。 4.4MSD迹象:指客观身体上的发现物。如:运动范围的减少、畸形、握手力量减少、 肌肉功能衰退等。 4.5MSD症状:员工出现MSD后的身体反映。如:疼痛、麻木、麻刺、烁热、抽筋、 僵硬等。 5内容 5.1风险评估:工厂必须对每项工作任务进行风险评估并形成书面报告,其中至少包含 以下各项: 5.1.1识别任务及相关危害。 5.1.2评估与危害相关的风险。 5.1.3确定用于降低风险的控制措施(如工作区域设计、岗位轮换)。 5.2人因工学管理要求与程序必须至少包括以下各项: 5.2.1单位主管应向员工宣导有关人因工学的相关知识以及MSD危害,鼓励员工自 主性及早报告MSD、以及这些疾患的迹象和症状。
5.2.2员工应当从自身工作实际情况来体会人因工学,并参与人因工程学的管理流 程,由HSE委员会成员定期进行人因工程学方面的交流以及审查雇员关于人 因工程学问题的建议。 5.2.3公司通过所报告的人因工程学危害及损伤趋势,积极讨论解决所接到的人因工 程学的问题,并依据实际情况来制订一些解决方案。 5.2.4在工作期间,为了减少重复性活动对员工造成的疲劳与健康损害,员工可以自 由地伸展四肢或调换姿势等方法来减轻不适症状;必要时,可适当的休息或变 换工作。 5.2.5对使用电脑的工作人员,要求以不超过1小时为限,进行适当地休息与自由活 动,减少不适的机率。 5.2.6针对设备配置及流程的设计中必须融合人因工程学,工作台面的高度应以不超 过工人腰部上方10cm为准,每位员工均应配备座椅,座椅以员工的舒适度为 准来设置高度,在办公区均配置可调座椅。 5.2.7禁止员工蹲在地面作业。 5.3单位主管每年对参与存在人因工程学相关危害任务的人员,进行以下内容的培训: 5.3.1常见的 MSD 及其迹象和症状。 5.3.2及早报告MSD 及其迹象和症状的重要性,以及未能及早报告的后果。 5.3.3如何报告工作场所的MSD 及其迹象和症状。 5.4MSD相关危害因素 5.4.1高度重复:一遍又一遍的进行相同的动作。 5.4.2过大的力量:做拉、敲、推等工作所需过多的体力。 5.4.3不正确的姿势:过份弯曲或扭曲身体的任何一部分。 5.4.4静负荷:在一个位置上保持很长时间会引起肌肉紧缩。 5.4.5定向压力:身体与坚硬的表面或边缘相接触。 5.4.6振动:使用振动工具或设备。 5.4.7极冷和极热:寒冷或高温的工作环境。
人机工程学产品分析分析
一.楼道灯使用声控,相比较开关式有何利弊? 控灯的工作原理是在一定强度的声音下灯光会自动亮起,而开关式灯是在有特定需求的情况下人为的去打开它。 声控灯相较于开关式的优点在于自动开灯和人离开后的自动关灯,可以节约电能。使用方面也很便捷,避免了人因黑暗而无法快速找到电灯开关。缺点就是灵敏度难以掌控,如果半夜有什么非人为的声响,灯也会亮起,如果台风来了,可能整夜都开着灯。而如果灵敏度太低则会导致需要很大的声音灯才会亮起,在夜里会有扰民的弊端。 二.为什么有的沙发很高档,可坐起来还要在腰部加个靠垫? 首先腰部加靠垫可以利用靠垫来调节人体与座位的接触点以获得更舒适的角度来减轻疲劳。它使用舒适并具有其它物品不可替代的装饰作用。 三.从“以人为本”的角度出发,列举生活中方便和不方便的设施和设计(不符合人体机学)? 不符合人机机学的设计 1.
这是某学校的食堂,操作窗口距离地面大概1.2米,学生点餐必须弯腰与工作人员交流,每到放学人多的时候总是挤满了人,点餐十分不方便,影响办事效率,无法满足人们的正常交流与工作。 2. 现代的车都是迷你型的,虽然车型小,在道路上不会占用太多地方,但是车型缩小,车内空间必然更小,此车车座到车顶距离太小,驾驶者要弓着背才能入座,不仅影响操作,而且还会引起脊柱变形和各种脊椎疾病。
3. 此插座位于桌子下面,距地面较近,使用时必须钻到桌子下面才能操作。
4. 此开关位于墙面与床铺之间,而且墙面与床铺的距离不到3CM,手指勉强可以触及,操作人必须将手伸入缝隙才能操作,影响人的正常使用。 5. 这是宿舍床铺的梯子,梯子设计成圆柱形的,表面积又很小,不符合人的脚步特征,上床的话脚底会疼痛。
人机工效
在工业界及其他地方所发生的事故中,经常有一个被人们笼统称为人为失误的因素。常言道:"人总是要犯错误的"。在预防事故或减少意外伤亡的工作中,也应该承认这一点。在工业安全与卫生管理追求的长期目标,就要求采取不断改善和提高人机工效的方法,以减少人们犯错误的机会。减少人为失误因素的考虑,是一件很重要的事,因为即使对自动化的过程,仍然要人进行控制、维护和某种程度上的干预。人们还是系统的设计及制造者,而且在这个过程之中,由于认识能力的局限性,也会犯错误。了解人们为什么会出错误,对于控制风险来讲是至关重要的。 人们都认识到,对"人为因素"的管理,即重要,又困难。机构、工艺程序及流程都要把人的能力、差错考虑在内。这里所指出的"人为因素",一般包括以下内容:(1)人们的认知能力、智力和体力; (2)人与其工作环境间的相互关系; (3)设备和系统设计对人的行为的影响; (4)能够影响到与安全相关的行为的组织方面的特性; (5)个人的社会及遗传特性。 对于从事工作的个体人员来讲,所有这些因素都很重要,这不仅是为了其身体的健康、安全及福利,而且也是因为这些因素比起工作中的"硬件"部分更不易控制,因而更容易被忽略。 10.2 人机工效学 人机工效学是一门关于人、对象及环境间的相互关系的应用研究。在工作环境中,对象包括椅子、桌子、机器和车间。不过,人机工效学所观察的不仅是椅子的设计。它的目标是对工作环境的全面的解决方案,包括形成一个更容易获得有关机器的信息,并且正确地理解这些信息的环境。 通过细致人机工效学设计可以改善"适配"性,同时提高职业的福利性。它还可以使员工感到满足,提高效率。人机工效学用科学的数据把对工作场所硬件系统的设计与人的体力、体形以及表现联系起来。通常,人机工效学设计侧重在对工具、设备及工作场所进行设计,使得作业更能够与人相适应,而不是要求人适应这些因素。为达到这一要求,通常是把下面几点结合起来考虑。 (1)工作设计:把人机工效学引进到工具、机器、作业场所和作业方法的设计中去。这些方面不是相互排斥的,而相互结合往往可以得到最好的解决方法。 (2)组织上的安排:主要是在需要从事体力劳动的作业中,限制可能对人产生的有害的效应。这包括了对选派人员的选择和培训、作业的要求必须与人的体力及技术相适应和作业的轮换及工休。 研究表明,采用人机工效学的解决方案,对作业条件进行优化,可以大大提高生产率。 对工作进行设计并使设备和工作相适应,可以减少失误和减少对健康的损害和事故。通过采用人机工效学的解决方案,可以改善。 (1)对操作者不舒适的作业场所; (2)让使用者感到不便的手工工具; (3)不容易为操作者辨认及使用的开关及阀门; (4)使人容易感到疲劳的作业。 关于体力劳动的强度,已经有了用人机工效学的方法来制定的强制性标准。 10.3 人体测量学 人体测量学是关于人体生理特性的测理科学。在重量、高度、体力等基本的特性方面,人的个体间有很大的差别。一辆根据"平均"乘客的特征来建造的小汽车可能使一个个子高的人要弯着腰才能坐下,这样就很不舒服。设计者需要有关人的身长、臂长和其他的物理数据
人机工程案例分析 3篇
人机工程案例分析3篇 人机工程学是一门新兴的边缘科学。它起源于欧洲,形成和发展于美国。以下是本站小编为大家带来的人机工程案例分析 3篇,希望能帮助到大家! 人机工程案例分析 1 1人机工程学(Ergonomics) 日本称为人间工学,或采用欧洲的名称,音译为 Ergonomics ,俄文音译名Эргнотика 在我国,所用名称也各不相同,有人类工程学、人体工程学、工效学、机器设备利用学和人机工程学等。为便于学科发展,统一名称很有必要,现在大部分人称其为人机工程学,简称人机学。人机工程学的确切定义是,把人机环境系统作为研究的基本对象,运用生理学、心理学和其它有关学科知识,根据人和机器的条件和特点,合理分配人和机器承担的操作职能,并使之相互适应,从而为人创造出舒适和安全的工作环境,使工效达到最优的一门综合性学科。 2 人机系统(Man-Machine systems) 人机系统,就是人和一些机器、装置、工具、用具等为完成某项工作或生产任务所组成的系统。更确切地说,这种系统还应包括环境条件在内。所以,人机系统实际上是指人机环境组成的一个不可分割的整体。人机系统的范围是很广阔的,有简单的,也有复杂的,如人用铅笔书写,就是一个简单的人机系统;又如船员驾驶轮船,飞行员驾驶飞机,司机开动汽车,就是一些较复杂的人机系统。在人机系统中,包括人、机器和环境三个组成部分,而每个组成部分可称为一个分系统或子系统。机器分系统具有控制器和显示器(显示器的种类很多,有视觉的、听觉的,触觉的等)。人,这一分系统在看到(或听到,触到)显示器的显示时,就要决定如何去控制,如何去操作。如果有必要调节时,即可通过人体的动作去进行操纵。整个人机系统是在各种不同的环境里工作。而环境条件又不同程度地影响着各个分系统的工作。可见,在人机系统中,人同机器、环境的关系总是相互作用,相互配合和相互制约的,但人始终起着主导作用。因此,为了能充分地发挥人和机器的作用,使整个人机系统可靠、安全、高效,以及操作方便和舒适,设计人机系统时就得充分考虑人和机器的特征与功能,使之相互协调配合,构成有机整体,达到生产和工作的最佳效果。
手动微型缝纫机正确使用方法
手动微型缝纫机正确使用方法 1、 持机:用右手四指托住机座,大拇指自然地放在机身上盖顶端,平稳地持住整机。如图(1)所示。 图(1) 2、 穿线:如图(2),将线轴上的线轻轻拉出。穿过引线图A,然后引入夹线调节片 B.再穿过引线圈。 C.引过的线头暂放在机针旁边,另将穿线器从机针前面(向机身结合部)穿过机针孔,再将线头引入穿线器小孔中,退出穿线器拉出头线约 2-3公分压线板压住即可待用(见图2) 见图2 3、 放布:用右手食指抬起压板,将准备好待缝的织物(厚度不超过0.8毫米)平整地放入压板下,轻轻放回压板压住织物;如图(3) 图(3) 4、 缝纫操作:用左手持织物,右手大拇指轻轻地迅速下压上盖顶端压到底后,大拇指再下压,如此反复,送布机构自动将被缝物向左送出。持机右手逐渐右移,左手持布配合缝纫节奏轻轻地将被缝物向左方移动,直至缝纫结束;如图(4) 图(4) 5、 结束:缝纫结束,用剪刀剪断线头,轻轻拉起压板取出织物。从被缝织物反面,
拉出最后的一节线头,使它穿进旁边的一节线圈内拉紧并打一个结,针脚就牢固了; 缝纫结束时切勿以硬拉织物方式来拉断线头,以免拉坏机针、针脚; 6、 本机能自动进布和调节针脚间的松紧,但要注意下列几点很有必要: A.针脚太紧如图A,将压力螺母稍向逆时针调; B. 针脚太松如图B,将压力螺母稍向顺时针调; 所示,系正确的针脚松紧。如需针脚大些,左手拉布可稍快些。如需针脚密一些,左手拉布可稍慢一些; 7、 换线团;如换用大线团,可将备用的接长杆与线筒轴连接,套入大线团。把备用的塑料帽置于杆之末端固定大线团,然后重新穿线,调整线的松紧后进行缝制,;使用50#-90#棉线或合成线效果最好; 8、 换针:松开固定螺丝,取出断针。所示装上新针,注意要将针的平整面对正固定螺丝,不可装反。针型DHK-14
人机工程学产品分析分析
.楼道灯使用声控,相比较开关式有何利弊? 控灯的工作原理是在一定强度的声音下灯光会自动亮起,而开关式灯是在有特定需求的情况下人为的去打开它。 声控灯相较于开关式的优点在于自动开灯和人离开后的自动关灯,可以节约电能。使用方面也很便捷,避免了人因黑暗而无法快速找到电灯开关。缺点就是灵敏度难以掌控,如果半夜有什么非人为的声响,灯也会亮起,如果台风来了,可能整夜都开着灯。而如果灵敏度 太低则会导致需要很大的声音灯才会亮起,在夜里会有扰民的弊端。 .为什么有的沙发很高档,可坐起来还要在腰部加个靠 垫? 首先腰部加靠垫可以利用靠垫来调节人体与座位的接触点以获得更舒适的角度来减轻疲劳。它使用舒适并具有其它物品不可替代的装饰作用。 的设施和设计(不符合人体机学) 不符合人机机学的设计 三.从“以人为本”的角度出发,列举生活中方便和不方便 1.
这是某学校的食堂,操作窗口距离地面大概 1.2米,学生点餐必须弯腰与工作人员交流,每 到放学人多的时候总是挤满了人,点餐十分不方便,影响办事效率,无法满足人们的正常交 流与工作。 2. 袒 现代的车都是迷你型的,虽然车型小,在道路上不会占用太多地方,但是车型缩小,车内空间必然更小,此车车座到车顶距离太小,驾驶者要弓着背才能入座,不仅影响操作,而且还 会引起脊柱变形和各种脊椎疾病。
3 . 此插座位于桌子下面,距地面较近,使用时必须钻到桌子下面才能操作。
此开关位于墙面与床铺之间,而且墙面与床铺的距离不到 必须将手伸入缝隙才能操作,影响人的正常使用。 这是宿舍床铺的梯子,梯子设计成圆柱形的, 表面积又很小,不符合人的脚步特征,上床的 话脚底会疼痛。4 5. 3CM,手指勉强可以触及,操作人
矿场人机工效管理制度
矿场人机工效管理制度 第一条各单位应对需搬运的生产活动进行识别,按照设计原则确定各种人工搬运的方法及姿势,作为(现场管理手册》的内容,并有针对性地对搬运员工进行培训。 第二条安全环保部应每半年对全矿各搬运活动的搬运工效进行分析,对影响搬运工效的主要因素制定管理措施,并落实各单位予以整改。 第三条人工搬运的方法及姿势应按照以下原则进行设计:靠近被搬运之货物,双脚站立于货物两侧,蹲下时两脚分开、屈膝、身体保持平衡,用手掌及手指紧握货物,手臂紧贴身体.下颗贴近胸前,挺腰确保背部平直,提举时用腿力将货物提起,拉近距离,慢慢起立直至双腿恢复直立姿势,最后要注意提举时动作要流畅,切勿急剧,转身时利用双脚,切勿扭腰旋转;人工搬运、下放笨重材料时,作业人员要佩戴好防砸胶鞋及其他劳动防护用品。 第四条生产技术部在井下采掘工程设计时需考虑工程作业空间需满足作业要求,同时还要考虑粉尘、噪声等因素对人机工效的影响;综合计划部在设计地面建筑工程时需考虑光线、温度及其他因素对人机工效的影响;物资装备公司分部在对井下设备的操纵位置的选择,生产设备、显示器、控制器的定位,安全防护装置的设置,作业工具的选购时,要适应人的生理、心理特点和所具备的技术。 第五条安全环保部应每半年组织相关主管部门对全矿各活动场
所的作业空间布局情况进行1次检查,对不符合布局原则的采取措施组织整改。 第六条为使作业员工的空间定位达到高效、安全舒适、美观等要求,相关主管部门应按照作业空间布局原则对作业位置与环境进行设计,设计内容包括作业人员的最佳视线区、最佳作业域、最小的装配作业空间以及最低限度的安全防护范围等。 第七条各单位每半年应以调查表的形式对各岗位人员的导致疲劳的有关因素进行识别评价,制定相应的纠正措施予以改进,并留有《影响人机工效因素纠正措施评价表》。 第八条作业疲劳调查内容应包括:超生理负荷的激烈动作和持久的体力或脑力劳动,工作单调,环境不良,精神因素,身体状况不好,劳动姿势与体位选择不合理,生产设备与工具设计不合理、不能减轻劳动强度和人的紧张情绪,工作空间过小,工作持续时间太长等。 第九条降低作业疲劳的措施可考虑;提高作业的自动化水平,正确选择作业姿势和体位,合理设计作业中的用力方法,改善作业内容、避免单调重复性作业,合理设计作业空间及环境,优化员工作业班次等。 第十条安全环保部应及时收集人机工效方面的抱怨信息,并每半年对影响人机工效的因素和纠正措施的有效性进行评价,并留有相关记录。 第十一条本制度由安全环保部负责解释,自发布之日起施行。
人机工程案例分析 3篇
人机工程案例分析3篇 1人机工程学(Ergonomics) 日本称为"人间工学",或采用欧洲的名称,音译为"Ergonomics",俄文音译名"Эргнотика"在我国,所用名称也各不相同,有"人类工程学"、"人体工程学"、"工效学"、"机器设备利用学"和"人机工程学"等。为便于学科发展,统一名称很有必要,现在大部分人称其为"人机工程学",简称"人机学"。"人机工程学"的确切定义是,把人机环境系统作为研究的基本对象,运用生理学、心理学和其它有关学科知识,根据人和机器的条件和特点,合理分配人和机器承担的操作职能,并使之相互适应,从而为人创造出舒适和安全的工作环境,使工效达到最优的一门综合性学科。 2人机系统(Man-Machinesystems) "人机系统",就是人和一些机器、装置、工具、用具等为完成某项工作或生产任务所组成的系统。更确切地说,这种系统还应包括环境条件在内。所以,人机系统实际上是指人机环境组成的一个不可分割的整体。人机系统的范围是很广阔的,有简单的,也有复杂的,如人用铅笔书写,就是一个简单的人机系统;又如船员驾驶轮船,飞行员驾驶飞机,司机开动汽车,就是一些较复杂的人机系统。在人机系统中,包括人、机器和环境三个组成部分,而每个组成部分可称为一个分系统或子系统。机器分系统具有控制器和显示器(显示器的种类很多,有视觉的、听觉的,触觉的等)。人,这一分系统在看到(或听到,触到)显示器的显示时,就要决定如何去控制,如何去操作。如
果有必要调节时,即可通过人体的动作去进行操纵。整个人机系统是在各种不同的环境里工作。而环境条件又不同程度地影响着各个分系统的工作。可见,在人机系统中,人同机器、环境的关系总是相互作用,相互配合和相互制约的,但人始终起着主导作用。因此,为了能充分地发挥人和机器的作用,使整个人机系统可靠、安全、高效,以及操作方便和舒适,设计人机系统时就得充分考虑人和机器的特征与功能,使之相互协调配合,构成有机整体,达到生产和工作的最佳效果。 3人机系统设计(Man-Machinesystemsdesign) 人们要完成某项工作或生产任务,就需要一定的机器或装置,但是有些机器或装置适合人的生理机能和心理特征,人们工作起来就感到舒适和省力,效率高而且安全。而有些则不是这样。所以,在设计机器或装置时,要尽可能考虑人体的机能和人的心理特征,力求在人操纵机器时所接触的部位尽量符合人体的各种因素。须使人体骨架结构能够适应它,肌肉组织能够操纵它,精神系统能够控制它。同时,还须在使用这些机器或装置时,保证人体安全。如果这些目标达不到,那么,人们所有期望的结果事故就很可能发生。人机工程学的这一基本思想是设计机器或作业空间时必须考虑的。一般来说,人机系统的设计可分六个阶段,即(1)调查研究;(2)编制设计任务书;(3)编制实施方案;(4)技术设计和施工图设计;(5)模型的制作;(6)人机系统的制作与鉴定。这些设计过程虽有先后次序之分,但各阶段之间却有着密切的联系,也可相互穿插进行。
人机工程案例分析 3篇汇总
人机工程学是一门新兴的边缘科学。它起源于欧洲,形成和发展于美国。以下是为大家带来的人机工程案例分析 3篇,希望能帮助到大家! 人机工程案例分析·1 1人机工程学(Ergonomics) 日本称为“人间工学”,或采用欧洲的名称,音译为“Ergonomics”,俄文音译名“Эргнотика”在我国,所用名称也各不相同,有“人类工程学”、“人体工程学”、“工效学”、“机器设备利用学”和“人机工程学”等。为便于学科发展,统一名称很有必要,现在大部分人称其为“人机工程学”,简称“人机学”。“人机工程学”的确切定义是,把人—机—环境系统作为研究的基本对象,运用生理学、心理学和其它有关学科知识,根据人和机器的条件和特点,合理分配人和机器承担的操作职能,并使之相互适应,从而为人创造出舒适和安全的工作环境,使工效达到最优的一门综合性学科。 2 人—机系统(Man-Machine systems) “人—机系统”,就是人和一些机器、装置、工具、用具等为完成某项工作或生产任务所组成的系统。更确切地说,这种系统还应包括环境条件在内。所以,人—机系统实际上是指人—机—环境组成的一个不可分割的整体。人—机系统的范围是很广阔的,有简单的,也有复杂的,如人用铅笔书写,就是一个简单的人—机系统;又如船员驾驶轮船,飞行员驾驶飞机,司机开动汽车,就是一些较复杂的人—机系统。在人—机系统中,包括人、机器和环境三个组成部分,而每个组成部分可称为一个分系统或子系统。机器分系统具有控制器和显示器(显示器的种类很多,有视觉的、听觉的,触觉的等)。人,这一分系统在看到(或听到,触到)显示器的显示时,就要决定如何去控制,如何去操作。如果有必要调节时,即可通过人体的动作去进行操纵。整个人—机系统是在各种不同的环境里工作。而环境条件又不同程度地影响着各个分系统的工作。可见,在人—机系统中,人同机器、环境的关系总是相互作用,相互配合和相互制约的,但人始终起着主导作用。因此,为了能充分地发挥人和机器的作用,使整个人—机系统可靠、安全、高效,以及操作方便和舒适,设计人—机系统时就得充分考虑人和机器的特征与功能,使之相互协调配合,构成有机整体,达到生产和工作的最佳效果。 3 人—机系统设计(Man-Machinesystems design) 人们要完成某项工作或生产任务,就需要一定的机器或装置,但是有些机器或装置适合人的生理机能和心理特征,人们工作起来就感到舒适和省力,效率高而且安全。而有些则不是这样。所以,在设计机器或装置时,要尽可能考虑人体的机能和人的心理特征,力求在人操纵机器时所接触的部位尽量符合人体的各种因素。须使人体骨架结构能够适应它,肌肉组织能够操纵它,精神系统能够控制它。同时,还须在使用这些机器或装置时,保证人体安全。如果这些目标达不到,那么,人们所有期望的结果—事故就很可能发生。人机工程学的这一基本思想是设计机器或作业空间时必须考虑的。一般来说,人—机系统的设计可分六个阶段,即(1)调查研究;(2)编制设计任务书;(3)编制实施方案;(4)技术设计和施工图设计;(5)模型的制作;(6)人—机系统的制作与鉴定。这些设计过程虽有先后次序之分,但各阶段之间却有