JPEG图像的信息隐写术与隐写分析
(完整版)数字图像处理第三版中文答案解析冈萨雷斯
第二章 2.1(第二版是0.2和1.5*1.5的矩形,第三版是0.3和1.5圆形) 对应点的视网膜图像的直径x 可通过如下图题2.1所示的相似三角形几何关系得到,即 ()()017 023 02.x .d = 解得x=0.06d 。根据2.1 节内容,我们知道:如果把中央凹处想象为一个有337000 个成像单元的圆形传感器阵列,它转换成一个大小2 5327.?π成像单元的阵列。假设成像单元之间的间距相等,这表明在总长为1.5 mm (直径) 的一条线上有655个成像单元和654个成像单元间隔。则每个成像单元和成像单元间隔的大小为s=[(1.5 mm)/1309]=1.1×10-6 m 。 如果在中央凹处的成像点的大小是小于一个可分辨的成像单元,在我们可以认为改点对于眼睛来说不可见。换句话说, 眼睛不能检测到以下直径的点: m .d .x 61011060-?<=,即m .d 610318-?< 2.2 当我们在白天进入一家黑暗剧场时,在能看清并找到空座时要用一段时间适应。2.1节描述的视觉过程在这种情况下起什么作用? 亮度适应。 2.3 虽然图2.10中未显示,但交流电的却是电磁波谱的一部分。美国的商用交流电频率是77HZ 。问这一波谱分量的波长是多少? 光速c=300000km/s ,频率为77Hz 。 因此λ=c/v=2.998 * 108(m/s)/77(1/s) = 3.894*106 m = 3894 Km. 2.5 根据图2.3得:设摄像机能看到物体的长度为x (mm),则有:500/x=35/14; 解得:x=200,所以相机的分辨率为:2048/200=10;所以能解析的线对为:10/2=5线对/mm. 2.7 假设中心在(x0,y0)的平坦区域被一个强度分布为: ])0()0[(2 2),(y y x x Ke y x i -+--= 的光源照射。为简单起见,假设区域的反射是恒定 的,并等于1.0,令K=255。如果图像用k 比特的强度分辨率进行数字化,并且眼睛可检测相邻像素间8种灰度的突变,那么k 取什么值将导致可见的伪轮廓? 解:题中的图像是由: ()()()()()[ ]()()[]2 02 02 020********y y x x y y x x e .e y ,x r y ,x i y ,x f -+---+--=?== 一个截面图像见图(a )。如果图像使用k 比特的强度分辨率,然后我们有情况见图(b ),其中()k G 21255+=?。因为眼睛可检测4种灰度突变,因此,k G 22564==?,K= 6。
数字隐写分析
信息隐藏理论与技术论文题目:数字隐写分析术方法研究与实现 姓名张思琪 院(系)计算机学院 专业班级2012110309 学号2012110760 指导教师杨榆 仲恺农业工程学院教务处制 摘要 本文主要研究以数字图像为载体的信息隐写分析技术。隐写算法中利用图像DCT 系数最不重要位隐藏信息的隐写算法具有透明性好,鲁棒性强等特点,这类隐写算法包括JSteg,Outguess等。本文研究了针对DCT系数LSB算法的隐写分析算法。主要对针对
JSteg隐写的检测进行研究。实验结果表明,采用基于DCT系数对值(pair values)的变化的卡方统计攻击方法来检测Jsteg顺序隐写,具有很好的检测效果。由于Westfeld等人提出的卡方检验方法的耗时很大,且不能检测出Jsteg随机隐写,故引出一种改进的卡方检验方法:快速卡方检验方法。快速卡方检验方法不仅能够检测出Jsteg顺序隐写,而且能检测出Jsteg随机隐写。同时能有效地估计出嵌入率。 关键词:隐写隐写分析 DCT 卡方检验 JSteg 目录 1 绪论 (1) 1.1 引语 (1) 1.2 信息隐藏技术的历史、应用和发展 (1)
1.2.1 信息隐藏技术的历史 (1) 1.2.2信息隐藏技术的应用 (1) 1.2.3 信息隐藏技术的发展 (2) 1.3 数字图像隐写检测技术 (2) 1.3.1隐写信息检测技术 (3) 1.3.2隐写信息的提取技术 (3) 2 基于图像统计模型的隐写分析 (4) 2.1 针对LSB替换隐写分析 (4) 2.1.1卡方检测方法 (6) 2.1.2 RS方法 (11) 2.1.3 SPA方法 (13) 2.2 针对K ±及随机调制隐写的隐写分析 (13) 2.2.1±1隐写的信息比率估计 (13) 2.2.2K ±隐写信息比率估计 (14) 2.3 随机调制隐写的信息比率估计 (14) 3 针对JSteg隐写的检测 (14) 3.1 卡方检测方法 (14) 3.2 快速卡方检验方法 (15) 3.2.1针对顺序JSteg隐写 (18) 3.2.2针对随机JSteg隐写 (18) 3.3 快速卡方检验方法—matlab实现 (18) 4 结论 (19) 参考文献 (20) 英语摘要 (22) 附录 (22) 致谢 (29) 仲恺农业工程学院毕业论文(设计)成绩评定表 ....................................................错误!未定义书签。
图像纹理特征的分析方法研究
图像纹理特征的分析方法研究 黄晶,杨杰 武汉理工大学信息工程学院,武汉(430063) E-mail :jinghuang1019@https://www.360docs.net/doc/c35469983.html, 摘 要:本文重点介绍了几种借助纹理统计特征的分析方法,并对算法进行了比较。这些方 法包括:基于图像分形维数的特征分析,基于灰度共生矩阵的特征分析,基于灰度直方图的 特征提取。 关键词:分形维数,灰度共生矩阵,纹理特征 中图分类号:TP391 1.引言 虽然存在形形色色的图像纹理,并且人们进行纹理分析方面的工作已近半个世纪,但至 今还没有一个公认的确切的定义。纹理图像在局部区域内可能称不规则性,但在整体上则表 现出某种规律性,其灰度分布往往表现出某种周期性。 就其广义而言,纹理特征就是图像局部性质的统计,一个纹理图像可以看成一组独立的 同分布随机变量(,)W j k 经一空间算子()O ?作用而成的结果(,)F j k ,并用这些数字特征构 造图像的纹理特征。对纹理特征的提取方法可以分为统计法﹑构造法和频谱法。 2.纹理特征的分析方法 2.1 基于分形维数的特征分析 在分形理论中,最经典的理论是Hausdorff 维数[1],它对分形的理论分析和理解都很重 要,但很难直接求取,在实际运用中更多的是盒维数,关联维数,自相似维数以及尺度维数, 本文选取的是盒维数中的差分盒维数。 差分盒维数算法是以盒维数算法为基础提出的一种简单、快速、精确的算法。将M M ×大小的图像分割成L L ×的子块,令r=L/M ,将图像视为一个三维空间中的一个表面 (,,(,))x y f x y ,其中(,)f x y 为图像(,)x y 位置处的灰度值。X ,Y 平面被分割成许多L L ×的网格。在每个网格上,是一列L L h ××的盒子,h 为单个盒子的高度。设总的灰度级为G 。 设在第(,)i j 网格中图像灰度的最小值和最大值分别落在第k 和第l 个盒子中,则: (,)1r n i j l k =?+ (1) 其中r n 是覆盖第(,)i j 网格中的图像所需的盒子数,因而可以求出覆盖整个图像所需的 盒子数r N : ,(,)r r i j N n i j =∑ (2) 则其分形维数log()lim log(1/) r N D r = (3)基于分形维数的特征分析算法: (1)将原图转化为灰度图像; (2)以图像的任意像点(,,(,))i j f i j 为中心选取L L ×大小的窗口计算r n
图像处理基本方法
图像处理的基本步骤 针对不同的目的,图像处理的方法不经相同。大体包括图像预处理和图像识别两大模块。 一、图像预处理: 结合识别复杂环境下的成熟黄瓜进行阐述,具体步骤如下: · 图像预处理阶段的流程图 对以上的图像流程进行详细的补充说明: 图像预处理的概念: 将每一个文字图像分检出来交给识别模块识别,这一过程称为图像预处理。 图像装换和图像分割以及区域形态学处理都是属于图像处理的基本内容之一。 图像转换:方法:对原图像进行灰度化处理生成灰度矩阵——降低运算速度(有具体的公式和方程),中值滤波去噪声——去除色彩和光照的影响等等。 图像分割:传统方法:基于阈值分割、基于梯度分割、基于边缘检测分割和基于区域图像割等方法。脉冲耦合神经网络 (PCNN)是针对复杂环境下 图像采集 图像采集中注意采集的方法、工具进行介绍。目的是怎样获取有代表性的样本。(包括天气、相机的位置等) 对采集的图像进行特征分析 目标的颜色和周围环境的颜色是否存在干涉的问题、平整度影响相机的拍摄效果、形状 图像转换 图像分割 区域形态学处理
的有效分割方法,分割的时候如果将一个数字图像输入PCNN,则能基于空间邻近性和亮度相似性将图像像素分组,在基于窗口的图像处理应用中具有很好的性能。 区域形态学处理:对PCNN分割结果后还存在噪声的情况下,对剩余的噪声进行分析,归类属于哪一种噪声。是孤立噪声还是黏连噪声。采用区域面积统计法可以消除孤立噪声。对于黏连噪声,可以采用先腐蚀切断黏连部分,再膨胀复原目标对象,在进行面积阙值去噪,通过前景空洞填充目标,最后通过形态学运算,二值图像形成众多独立的区域,进行各连通区域标识,利于区域几何特征的提取。 二、图像识别: 针对预处理图像提取 目标特征 建立LS SVM分类器 得到结果 图像识别流程图 提取目标特征:目标特征就是的研究对象的典型特点,可以包括几何特征和纹理特征。 对于几何特征采用的方法:采用LS-SVM支持向量机对几何特征参数进行处理,通过分析各个参数的分布区间来将目标和周围背景区分开,找出其中具有能区分功能的决定性的几何特征参数。 纹理特征方法:纹理特征中的几个参数可以作为最小二乘支持向量机的辅助特征参数,提高模型的精准度。 最小二乘支持向量机介绍:首先选择非线性映射将样本从原空间映射到特征空间,以解决原空间中线性不可分问题,在此高维空间中把最优决策问题转化为等式约束条件,构造最优决策函数,并引入拉格朗日乘子求解最优化问题,对各个变量求偏微分。 LS SVM分类器:对于p种特征选择q个图像连通区域,作为训练样本。依
图像隐写分析研究新进展
Journal of Image and Signal Processing 图像与信号处理, 2017, 6(3), 131-138 Published Online July 2017 in Hans. https://www.360docs.net/doc/c35469983.html,/journal/jisp https://https://www.360docs.net/doc/c35469983.html,/10.12677/jisp.2017.63016 文章引用: 董晶, 钱银龙, 王伟. 图像隐写分析研究新进展[J]. 图像与信号处理, 2017, 6(3): 131-138. Recent Advances in Image Steganalysis Jing Dong 1,2, Yinlong Qian 1,3*, Wei Wang 1 1 Center for Research on Intelligent Perception and Computing, National Laboratory of Pattern Recognition, Institute of Automation, Chinese Academy of Sciences, Beijing 2State Key Laboratory of Information Security, Institute of Information Engineering, Chinese Academy of Sciences, Beijing 3Department of Automation, University of Science and Technology of China, Hefei Anhui Received: Jun. 1st , 2017; accepted: Jun. 18th , 2017; published: Jun. 21st , 2017 Abstract In recent years, steganalysis has become an important research direction in information security. With rapid development, numerous methods have been proposed to solve the steganalysis prob-lem. This article aims to review recent advances in image steganalysis to provide useful informa- tion to the researchers in this field. It first summarizes recent progress in traditional handcrafted feature based methods, and then introduces the deep learning based steganalysis, which is a new trend in steganalysis. Finally, the article summarizes the future trends and challenges in stegana-lysis. Keywords Steganography, Steganalysis, Universal Steganalysis, Pattern Recognition, Deep Learning 图像隐写分析研究新进展 董 晶1,2,钱银龙1,3*,王 伟1 1 中科院自动化研究所模式识别国家重点实验室智能感知中心,北京 2中科院信息工程研究所信息安全国家重点实验室,北京 3中国科学技术大学自动化系,安徽 合肥 收稿日期:2017年6月1日;录用日期:2017年6月18日;发布日期:2017年6月21日 摘 要 隐写分析是信息安全领域一个很重要的研究方向。随着研究的快速发展,已经有大量的隐写分析方法提*通讯作者。
数字图像处理第三版 (Rafael C.Gonzalez著)第三章答案
(a )由2 )(Kr Ae r T s -==,3/2 A Ae KL =-得:) 3/1ln(20=-KL ,20 /0986.1L K = 2 2 0986.1)(r L Ae r T s -== (b )、由 , 4/)1(2 0B e KL =--B 得: )4/3ln(2 0=-KL ,2 0/2877.0L K = )1()(2 2 2877.0r L e B r T s - -== (c )、 逐次查找像素值,如(x ,y )=(0,0)点的f (x ,y )值。若该灰度值的4比特的第0 位是1,则该位置的灰度值全部置1,变为15;否则全部置0,变为0。因此第7位平面[0,7]置0,[7,15]置1,第6位平面[0,3],[4,7]置0,[8,11],[12,15]置15。依次对图像的全部像素进行操作得到第0位平面,若是第i 位平面,则该位置的第i 位值是0还是1,若是1,则全置1,变为15,若是0,则全置0 设像素的总数为n ,是输入图像的强度值,由,rk 对 应sk ,所以,由 和得 由此得知,第二次直方图均衡化处理的结果与第一次直 方图均衡化处理的结果相同,这里我们假设忽略不计四舍五入的误差。
3.11题、由 dw w p z G v z z )()(0 ? = =, ?? ?=<<-5 .0041 5.044)( w w w w z w p { 5 .0021 5.02210 2 2 )()(<<<<+-= = =? z z z z z z z dw w p z G v 令v s =得 所以?? ???=?? ?? ?==- <<+-±<<- -+-±±-±-5.010221 5.0121 )2(25.022 125.01 22 )(r r r r r r v v v G z 3.12题、第k 个点邻域内的局部增强直方图的值为: P r (r k )=n k /n (k=0,1,2,……K-1)。这里n k 是灰度级为r k 的像素个数,n 是邻域内像素的总个数,k 是图像中可能的灰度级总数。假设此邻域从左以一个像素为步长向右移动。这样最左面的列将被删除的同时在后面又产生一个新的列。变化后的直方图则变成 : (k=0,1,2,……K-1) 这里n lk 是灰度级r k 在左面的列出现的次数,n rk 则为在右面出现的次数。 上式也可以改写成: (k=0,1,2,……K-1) 同样的方法也适用于其他邻域的移动: 这里a k 是灰度级r k 在邻域内在移动中被删除的像素数,b k 则是在移动中引入的像素数: (k=0,1,2,…… K-1) 上式等号右边的第一项为0(因为f 中的元素均为常数)。变量 是噪声的简单抽样,它 的方差是。因此 并且我们可以得到。上述过
图像匹配的主要方法分析
图像匹配的主要方法分析 在我国的图像处理中,有很多的关键技术正在不断的发展和创新之中。这些相关技术的发展在很大程度上推动了我国图像处理事业的发展。作为图像处理过程中的关键技术,图像匹配技术正在受到越来越多的关注。文章针对图像匹配的主要方法进行详细的论述,希望通过文章的阐述和分析能够为我国的图像匹配技术的发展和创新贡献微薄力量,同时也为我国图像处理技术的发展贡献力量。 标签:图像处理;图像匹配;特征匹配;方法 在我国的图像处理技术中,图像的匹配技术不仅仅是其中的重要组成部分,同时还是很多图像技术的发展创新的技术基础。例如图像技术中的立体视觉技术;图像技术中的运动分析技术以及图像技术中的数据融合技术等。通过上述内容可以看出,在我国的图像技术中,图像匹配技术具有非常广泛的应用。随着我国的相关技术不断的创新和发展,对于图像匹配技术的要求也是越来越高。这样就要求我国的图像匹配技术有更深层次的研究和发展。我国现阶段的研究主要是针对图像匹配过程中的匹配算法进行研究,希望借助研究能够更加有效的提升在实际的工作应用中的图像质量,同时也能够在很大程度上提升图像处理的图像分别率。文章的主要陈述点是通过图像匹配技术的具体方法进行优点和缺点的分析,通过分析优点和缺点来论述我国图像处理技术中的图像匹配技术的发展方向以及改进措施。近些年出现了很多的图像匹配方法,针对现阶段的新方法以及新的研究思路我们在实际的应用过程中要有一个非常清醒的选择。文章针对这一问题主要有三个内容的阐述。第一个是图像匹配技术的算法融合;第二个是图像匹配技术中的局部特征算法;最后一个是图像匹配技术中的模型匹配具体算法。 1 现阶段在世界范围内较为经典的图像匹配技术的算法 关于现阶段在世界范围内的较为经典的图像匹配技术的算法的阐述,文章主要从两个方面进行分析。第一个方面是ABS图像匹配算法。第二个方面是归一化相互关图像匹配算法。下面进行详细的论述和分析。 (1)算法一:ABS图像匹配算法。ABS图像匹配算法最主要的原理就是要使用模板的图像以及相应的匹配图像的搜索用窗口之间的转换差别来显示两者之间的关联性。图像匹配的大小在数值上等同于模板图像的窗口滑动顺序。窗口的每一次滑动都会引起模板图像的匹配计算。现阶段ABS的算法主要有三个,如下: 在选择上述三种计算方法的过程中要根据实际情况社情相应的阀值,否则会出现很高的失误率。上述的三种算法使用范围较狭窄。只使用与等待匹配的图像在模板影像的计算。 (2)算法二:归一化相互关图像匹配算法。归一化相互关的图像匹配算法在现阶段是较为经典的算法。通常专业的称法为NC算法。此计算方法主要是采
数字图像处理第三版中文答案--冈萨雷斯
数字图像处理第三版中文答案--冈萨雷斯
第二章 2.1(第二版是0.2和1.5*1.5的矩形,第三版是0.3和1.5圆形) 对应点的视网膜图像的直径x 可通过如下图题2.1所示的相似三角形几何关系得到,即 ()()017 02302.x .d = 解得x=0.06d 。根据2.1 节内容,我们知道:如果把中央凹处想象为一个有337000 个成像单元的圆形传感器阵列,它转换成一个大小25327.?π成像单元的阵列。假设成像单元之间的间距相等,这表明在总长为1.5 mm (直径) 的一条线上有655个成像单元和654个成像单元间隔。则每个成像单元和成像单元间隔的大小为s=[(1.5 mm)/1309]=1.1×10-6 m 。 如果在中央凹处的成像点的大小是小于一个可分辨的成像单元,在我们可以认为改点对于眼睛来说不可见。换句话说, 眼睛不能检测到以下直径的点: m .d .x 61011060-?<=,即m .d 6 10318-?<
2.2 当我们在白天进入一家黑暗剧场时,在能看清并找到空座时要用一段时间适应。2.1节描述的视觉过程在这种情况下起什么作用? 亮度适应。 2.3 虽然图2.10中未显示,但交流电的却是电磁波谱的一部分。美国的商用交流电频率是77HZ 。问这一波谱分量的波长是多少? 光速c=300000km/s ,频率为77Hz 。 因此λ=c/v=2.998 * 108(m/s)/77(1/s) = 3.894*106m = 3894 Km. 2.5 根据图2.3得:设摄像机能看到物体的长度为x (mm),则有:500/x=35/14; 解得:x=200,所以相机的分辨率为:2048/200=10;所以能解析的线对为:10/2=5线对/mm. 2.7 假设中心在(x0,y0)的平坦区域被一个强度分布为: ])0()0[(22),(y y x x Ke y x i -+--= 的光源照射。为简单起见,假设区域的反射是恒定的,并等于1.0,令K=255。如果图像用k 比特的强度分辨率进行数
图像分析基本原理及分析过程
图像分析基本原理及分析过程 概述 在生物及医学研究中,对图像的判读与分析特别是对显微镜下微观图像的观察研究从来都是重要的研究手段。随着技术的进步,分析图像的方法也从眼观尺量进入到了使用计算机软件进行定量分析的阶段。计算机软件的发展速度呈加速前进,采集图像的设备也不断更新,这使得我们能有更多的手段来分析测量复杂的生物图像。 现在我们可以使用CCD数码相机来采集图像。使用功能比较强大的图像分析软件来进行图像分析测量。相比之下,在不太久远的十来年前使用的图像分析仪及单色的图像采集摄像机已经过时了。而图像分析的手段也比以前丰富。简单地引用以前的分析方法未必就是最佳的方法,在许多情况下,需要我们依据软件及相机的情况设计与研究目标相适应的分析方法。 分析测量图像绝不仅仅是一个软件使用的问题,而是从实验设计开始,就要综合考虑研究目标、样品制作方法、拍摄方式、选择视野等各方面因素,最后才是通过软件实现最有效的图像分析测量。一个完整的图像分析过程应该包括: 1.明确需要测量分析的对象。 2.使用适当的方法拍摄下这个对象,包括进行适当的染色及取样,采集到突出显示的测量对象的照片。 3.分析照片上的图像元素,确定能反映测量对象的图像图形 4.测量照片上的图形的测量参数,进而得到测量对象的测量数据 5.对测量对象进行统计分析。图像分析的最佳效果,是利用图像分析软件可以自动地判断测量目标,准确分析测量出目标对象的数值。由于生物图像的复杂性,软件往往作不到这一点。此时只能退而求其次,采取抽样统计,手工选择等方法进行近似的测量。测量方法本身有时候也能成为一个研究课题。 一、把研究目标转换到图像分析问题上。 在丁香园混了好几年了,虽然很喜欢与大家讨论图像分析的问题,但是却经常对一些求助视而不
多域数字图像隐写技术的实现与讨论
多域数字图像隐写技术的实现与讨 论 制作日期:2014.6.3
摘要 随着科技的发展,信息安全技术已经成为不可忽略的因素。而网络的普及及应用,让多媒体技术得到了广泛的发展,因此图像及视频的安全变得越来越重要。本文正是在这种时代背景下,介绍一种关于图像处理的信息隐藏技术。 用于进行隐蔽通信的图像信息隐藏算法可以分为两大类:基于空域的信息隐藏算法和基于变换域的信息隐藏算法。基于变换域的算法以F5为代表算法。 下面我们介绍一下变换域的算法。 关键字:隐藏嵌入信息图像
目录 一、常用的变换域的数字图像隐写方法。 (4) 1.1 JSteg隐写。 (4) 1.1.1 主要思想: (4) 1.1.2 具体嵌入过程: (4) 1.2 F5隐写。 (4) 1.2.1 具体嵌入过程: (4) 1.3 F4隐写。 (4) 1.3.1具体嵌入过程: (4) 1.4 F3隐写。 (4) 二、基于MATLAB的F3数字图像隐写技术。 (5) 2.1 F3隐写的原理。 (5) 2.2 F3隐写的算法。 (5) 2.3 运用F3隐写技术进行信息隐藏。 (5) 2.3.1 嵌入流程图。 (5) 2.3.2 实现过程。 (6) 三、讨论与分析。 (9) 3.1 对F3隐写技术的分析。 (9) 四、附录。 (9) 4.1使用的软件。 (9) 4.2软件的简介。 (9) 4.3 关键代码。 (10)
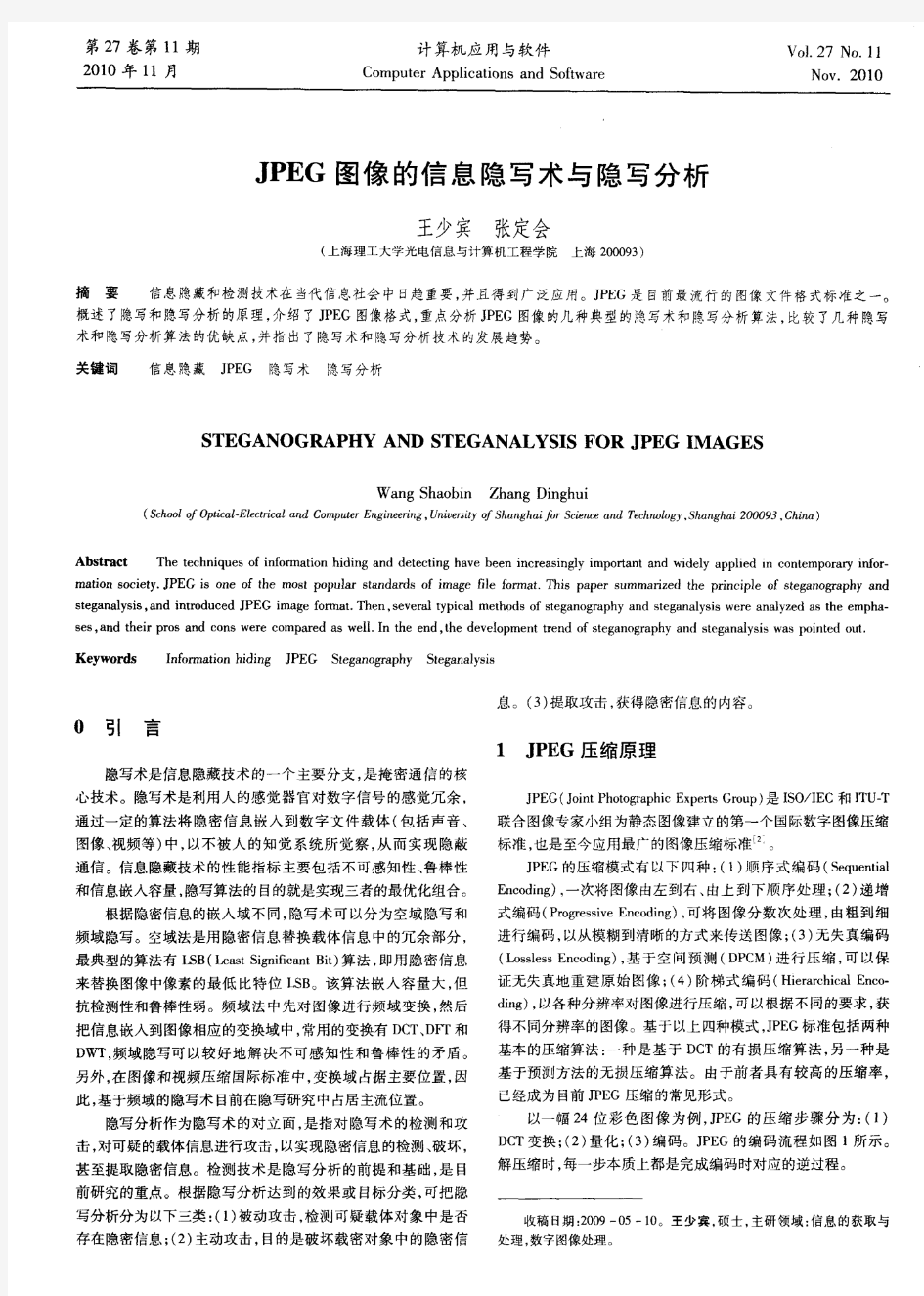
一、常用的变换域的数字图像隐写方法。 1.1 JSteg隐写。 1.1.1 主要思想: 用秘密信息比特直接替换JPEG图像量化后DCT系数的最低比特位,但不在量化后值为0或1的DCT系数中嵌入信息。 1.1.2 具体嵌入过程: (1)部分解码JPEG图像,得到二进制存储的AC系数,判断该AC系数是否等于1或0,若等于则跳过该AC系数,否则,执行下一步。 (2)判断二进制存储的AC系数的LSB是否与要嵌入的秘密信息比特相同,若相同,则不对其进行更改,否则,执行下一步。 (3)用秘密信息比特替换二进制存储的AC系数的LSB,将修改后的AC系数重新编码得到隐密的JPEG图像。 1.2 F5隐写。 1.2.1 具体嵌入过程: 1)获取载体图像,进行JPEG压缩,得到量化后的DCT系数。 2)对1)中得到的DCT系数进行混洗。 3)对可用的DCT系数计数,并根据欲嵌入的秘密信息长度计算嵌入信息所使用的三元组(1,n,k)。 4)取出n个混洗后的非0的AC DCT系数及欲嵌入的k比特信息,采用矩阵编码进行嵌入。 a)计算载体数据是否需要更改。若不需要,则继续下一组的嵌入;若需要,则更改相应的数据LSB。 b)对经过更改后的数据,判断是否产生了新的值为0的系数。若有,则此次嵌入无效,重新取出n个可用系数,执行a);若没有,重复执行4),直 到秘密信息全部嵌入。 5)逆混洗,恢复DCT系数为原来的顺序。 6)生成隐密图像。 1.3 F4隐写。 1.3.1具体嵌入过程: 和F3过程差不多,只是用正奇系数和负偶系数代表1,正偶系数和负奇系数代表0. 1.4 F3隐写。 1)信息嵌入式,若DCT系数的LSB与要嵌入的秘密信息比特相同,则不作改动;否则,将该DCT系数的绝对值减1。 2)秘密信息嵌入在非0的DCT系数上,为0的系数不嵌入任何信息。另外,
数字图像处理第三版中文答案冈萨雷斯
如对您有帮助,请购买打赏,谢谢您! 第二章 2.1(第二版是0.2和1.5*1.5的矩形,第三版是0.3和1.5圆形) 对应点的视网膜图像的直径x 可通过如下图题2.1所示的相似三角形几何关系得到,即 解得x=0.06d 。根据2.1 节内容,我们知道:如果把中央凹处想象为一个有337000 个成像单元的圆形传感器阵列,它转换成一个大小2 5327.?π成像单元的阵列。假设成像单元之间的间距相等,这表明在总长为1.5 mm (直径) 的一条线上有655个成像单元和654个成像单元间隔。则每个成像单元和成像单元间隔的大小为s=[(1.5 mm)/1309]=1.1×10-6 m 。 如果在中央凹处的成像点的大小是小于一个可分辨的成像单元,在我们可以认为改点对于眼睛来说不可见。换句话说, 眼睛不能检测到以下直径的点: m .d .x 61011060-?<=,即m .d 610318-?< 2.2 当我们在白天进入一家黑暗剧场时,在能看清并找到空座时要用一段时间适应。2.1节描述的视觉过程在这种情况下起什么作用? 亮度适应。 2.3 虽然图2.10中未显示,但交流电的却是电磁波谱的一部分。美国的商用交流电频率是77HZ 。问这一波谱分量的波长是多少? 光速c=300000km/s ,频率为77Hz 。 因此λ=c/v=2.998 * 108(m/s)/77(1/s) = 3.894*106m = 3894 Km. 2.5 根据图2.3得:设摄像机能看到物体的长度为x (mm),则有:500/x=35/14; 解得:x=200,所以相机的分辨率为:2048/200=10;所以能解析的线对为:10/2=5线对/mm. 2.7 假设中心在(x0,y0)的平坦区域被一个强度分布为: ])0()0[(22),(y y x x Ke y x i -+--= 的光源照射。为简单起见,假设区域的反射是恒定的,并等于1.0,令K=255。如果图像用k 比特的强度分辨率进行数字化,并且眼睛可检测相邻像素间8种灰度的突变,那么k 取什么值将导致可见的伪轮廓? 解:题中的图像是由: 一个截面图像见图(a )。如果图像使用k 比特的强度分辨率,然后我们有情况见图(b ),其中()k G 21255+=?。因为眼睛可检测4种灰度突变,因此,k G 22564==?,K= 6。也就是说,k 2小于64的话,会出现可见的伪轮廓。 2.9
三种图像融合方法实际操作与分析
摘要:介绍了遥感影像三种常用的图像融合方式。进行实验,对一幅具有高分辨率的SPOT全色黑白图像与一幅具有多光谱信息的SPOT图像进行融合处理,生成一幅既有高分辨率又有多光谱信息的图像,简要分析比较三种图像融合方式的各自特点,择出本次实验的最佳融合方式。 关键字:遥感影像;图像融合;主成分变换;乘积变换;比值变换;ERDAS IMAGINE 1. 引言 由于技术条件的限制和工作原理的不同,任何来自单一传感器的信息都只能反映目标的某一个或几个方面的特征,而不能反应出全部特征。因此,与单源遥感影像数据相比,多源遥感影像数据既具有重要的互补性,也存在冗余性。为了能更准确地识别目标,必须把各具特色的多源遥感数据相互结合起来,利用融合技术,针对性地去除无用信息,消除冗余,大幅度减少数据处理量,提高数据处理效率;同时,必须将海量多源数据中的有用信息集中起来,融合在一起,从多源数据中提取比单源数据更丰富、更可靠、更有用的信息,进行各种信息特征的互补,发挥各自的优势,充分发挥遥感技术的作用。[1] 在多源遥感图像融合中,针对同一对象不同的融合方法可以得到不同的融合结果,即可以得到不同的融合图像。高空间分辨率遥感影像和高光谱遥感影像的融合旨在生成具有高空间分辨率和高光谱分辨率特性的遥感影像,融合方法的选择取决于融合影像的应用,但迄今还没有普适的融合算法能够满足所有的应用目的,这也意味着融合影像质量评价应该与具体应用相联系。[2] 此次融合操作实验是用三种不同的融合方式(主成分变换融合,乘积变换融合,比值变换融合),对一幅具有高分辨率的SPOT全色黑白图像与一幅具有多
光谱信息的SPOT图像进行融合处理,生成一幅既有高分辨率又有多光谱信息的图像。 2. 源文件 1 、 imagerycolor.tif ,SPOT图像,分辨率10米,有红、绿、两个红外共四个波段。 2 、imagery-5m.tif ,SPOT图像,分辨率5米。 3. 软件选择 在常用的四种遥感图像处理软件中,PCI适合用于影像制图,ENVI在针对像元处理的信息提取中功能最强大,ER Mapper对于处理高分辨率影像效果较好,而ERDAS IMAGINE的数据融合效果最好。[3] ERDAS IMAGINE是美国Leica公司开发的遥感图像处理系统。它以其先进的图像处理技术,友好、灵活的用户界面和操作方式,面向广阔应用领域的产品模块,服务于不同层次用户的模型开发工具以及高度的RS/GIS(遥感图像处理和地理信息系统)集成功能,为遥感及相关应用领域的用户提供了内容丰富而功能强大的图像处理工具。 2012年5月1日,鹰图发布最新版本的ERDAS IMAGINE,所有ERDAS 2011软件用户都可以从官方网站上下载最新版本 ERDAS IMAGINE 11.0.5. 新版本包括之前2011服务包的一些改变。相比之前的版本,新版本增加了更多ERDAS IMAGINE和GeoMedia之间的在线联接、提供了更为丰富的图像和GIS产品。用户使用一个单一的产品,就可以轻易地把两个产品结合起来构建一个更大、更清
数字图像处理的基本方法
一、图像的预处理技术 图像处理按输入结果可以分为两类,即输入输出都是一副图像和输入一张图像输出不再是图像的数据。图像处理是个很广泛的概念,有时候我们仅仅需要对一幅图像做一些简单的处理,即按照我们的需求将它加工称我们想要得效果的图像,比如图像的降噪和增强、灰度变换等等。更多时候我们想要从一幅图像中获取更高级的结果,比如图像中的目标检测与识别。如果我们将输出图像中更高级的结果视为目的的话,那么我们可以把输入输出都是一幅图像看作是整个处理流程中的预处理。下面我们将谈到一些重要的预处理技术。 (一)图像增强与去噪 图像的增强是一个主观的结果,原来的图像按照我们的需求被处理成我们想要的效果,比如说模糊、锐化、灰度变换等等。图像的去噪则是尽可能让图像恢复到被噪声污染前的样子。衡量标准是可以度量的。不管是图像的增强与去噪,都是基于滤波操作的。 1.滤波器的设计方法 滤波操作是图像处理的一个基本操作,滤波又可分为空间滤波和频域滤波。空间滤波是用一个空间模板在图像每个像素点处进行卷积,卷积的结果就是滤波后的图像。频域滤波则是在频率域看待一幅图像,使用快速傅里叶变换将图像变换到频域,得到图像的频谱。我们可以在频域用函数来保留或减弱/去除相应频率分量,再变换回空间域,得到频域滤波的结果。而空间滤波和频域滤波有着一定的联系。频域滤波也可以指导空间模板的设计,卷积定理是二者连接的桥梁。 (1)频域滤波 使用二维离散傅里叶变换(DFT )变换到频域: ∑∑-=+--==10)//(210),(),(N y N vy M ux i M x e y x f v u F π 使用二维离散傅里叶反变换(IDFT )变换到空间域: ∑∑-=-=+=1010)//(2),(1),(M u N v N vy M ux i e v u F MN y x f π 在实际应用中,由于该过程时间复杂度过高,会使用快速傅里叶变换(FFT )来加速这个过程。现在我们可以在频域的角度看待这些图像了。必须了解的是,图像中的细节即灰度变化剧烈的地方对应着高频分量,图像中平坦变化较少的地方对应着低频分量。图像中的周期性图案/噪声对应着某一个频率区域,那么在频域使用合适的滤波器就能去除相应的频率分量,再使用傅里叶反变换就能看到实际想要的结果。 不同的是,在频域的滤波器不再是做卷积,而是做乘积,因为做乘法的目的在于控制频率分量。比较有代表性的有如下几个滤波器: 高斯低通滤波器 222/),(),(σv u D e v u H -= D 是距离频率矩形中心的距离。该滤波器能保留低频分量,逐渐减小高频分量,对原图像具有模糊作用。
数字图像处理第三版 (Rafael C.Gonzalez著)第六章答案
第六章 6.1 给出用于产生图6.5中标为“日光”的点的红光、绿光、蓝光的百分比。 从图中可知,x=0.31,y=0.32,由x+y+z=1可得z=0.37,这是三色值系数。我们感兴趣的是三色值XYZ。由他们的变换公式:x = X/(X+Y+Z),y=Y/(X/Y/Z),z=Z/(X/Y/Z),可知他们的比例是相同的,故可得:X=0.31,Y=0.32,Y=0.37 6.2 用c 表示给定的颜色,并且给出它的坐标,用(x0,y0)表示,c 和c1之间的距离以及c1和c2的距离分别为: c1占c的百分比表示为: c2的百分比用p2表示:p2=100-p1,由上面的等式我们知道,作为例子,当c=c1时,那么d(c,c1)=0,并且p1=100%,p2=0%,同样当d(c,c1)=d(c1,c2)时,p1=0%,p2=100%,从它们简单的关系中可以容易地得出它们的值。 6.5
在中心点有R/2+ B/2+G= R+G+B /2 + G /2=midgray+G/2,由于增加了灰色分量和强度使人们看起来像纯绿色。 6.7 在每幅12比特图像中有4096212=种可能值。对于灰度色彩,所有的RGB 分量必须相等,所以有4096种不同的灰度。 6.8 (a )R 图像中的所有像素值都是255。在G 图像中,第一列全是0,第二列全是1,最后一列全由255组成。在B 图像中,第一行全为255,第二行全为254,直到最后一行全为0。 (b )(令坐标轴编号同书中图6.7(RGB 彩色立方体示意图)相同。)则:(0,0,0)=白色,(1,1,1)=黑色,(1,0,0)=青色,(1,1,0)=蓝色,(1,0,1)=绿色,(0,1,1)=红色,(0,0,1)=黄色,(0,1,0)=深红色。 (c)不包括黑点和白点是饱和的。在包含黑点或者白点时,饱和度会下降。 6.10 从式(6.5-5)的RGB 亮度映射函数推导出式(6.5-6)的CMY 亮度映射函数。 i i ks s = (i=1,2,3) (6.5-5) )1(k ks s i i -+= (i=1,2,3) (6.5-6) 由公式???? ??????-=????????? ?B G R Y M C 1可知,CMY 图像中的每个分量都是响应RGB 图像单一分量的函数。C 是R 的函数,M 是G 的函数,Y 是B 的函数。为清楚起见,我们使用素数标示CMY 分量。有公式 (i=1,2,3)得,)3,2,1(==i ks s i i (对应RGB 分量),并且有公
图像分析操作步骤
一.通用部分 1.1 标定标尺 (只做一次就可以,目录为软件下的scale文件夹)打开软件—打开标尺图象 点击工具栏上的测量—标定标尺 显示标定标尺窗口如下:选择任意向线段
在图象上用鼠标画出一段标尺的长度 通常选择公制 视长度:电脑自动计算(鼠标所画出的线经过的像素点的个数); 物理长度:鼠标所画出的线的实际长度(一般情况,一小格为10um) 放大倍数:当前标尺图象的倍数 点保存标尺,输入当前的倍数并保存。同样的方法标出其他的倍数。(有几组放大倍数就要标定几次)
1.2 加载系统标尺(默认路径为软件下的SCALE文件夹) 在进行测量分析之前,必须选定正确的系统标尺,如果没有选定正确的标尺,不能得出实际物理长度。 方法一(推荐):打开图象后,点(自动打开SCALE文件夹下的标尺列表),从列表中选取当前图象的标尺,点“加载”即可(或者双击) 方法二:测量—选定标尺 调入标尺:可以从硬盘中其他位置调入标尺 单位制式 将选中的标尺加载到系统中 卸载当前的标尺 加载特殊倍数的标尺,如80X 选定后,在软件的状态栏中有显示,。 软件会自动记录上一次的系统标尺,所以分析相同倍数的照片时,不必每次都加载系统标尺, 只要核对一下当前的系统标尺是否与图象倍数一致即可。 若图象命名时,结尾的标号与标尺名称相同时,软件会自动加载正确的系统标尺(只适合新打开的图象)。例如:图象的名称为:轴承钢—心部001—200X ,打开此图象时,软件会自动加载200X的系统标尺文件。
1.3 图象亮度对比度的调整 如果对采集的图象的亮度不满意,可以用此功能进行调节。点工具栏上的。 处理前 处理前处理后 这三个调钮分辨调整图象的亮度、对比度和r值。 应用:执行当前操作 恢复:恢复到图象的原始形态 保存:保存当前的对比度参数(默认路径为软件下LUT文件夹) 调入:调用已保存的对比度参数
MRI图像分析方法
Analysis of DE-MRI Images Three-dimensional visualization and segmentation of the MRI was performed using OsiriX 2.7.5.19 The LA was segmented manually in all patients and verified visually in the original image stack prior to rendering. Initial visualization used a Maximum Intensity Projection (MIP) to assess contrast consistency followed by volume rendering using a ray-cast engine with linear table opacity. A Color Look-Up Table (CLUT) mask was applied in order to better differentiate between enhanced and non-enhanced tissue. Image Quantification In all images, the epicardial and endocardial borders were manually contoured using image display and analysis software written in MATLAB (The Mathworks Inc. Natick, MA). The relative extent of fibrosis was quantified within the LA wall using a threshold based algorithm (Appendix). Patients were assigned to one of three groups based on the extent (percentage of LA myocardium) enhancement. The extent of enhancement was entered into analysis as a categorical variable. Patients with mild enhancement showed abnormal enhancement in less than 15% of the LA wall. Moderate enhancement was considered to be between 15% and 35% of the LA wall. Extensive enhancement was considered to be greater than 35% LA wall enhancement. LA volume was also entered into the predictive model as a categorical variable with patients divided into four separate groups based on the quartile cut-off points. Quartile 1 included patients with LA volume < 59.89 mL, quartile 2 included patients with LA volume between 59.9 and 85.9 mL, quartile 3 included patients with LA volume between 85.91 to 116.12 mL, and quartile 4 included patients with LA volume > 116.13 mL.