Apple harvesting robot picking path planning and(Academy2009)

Apple harvesting robot picking path planning and
simulation
Yuan Yanwei, Zhang Xiaochao, Zhao Huaping
Institute of Mechatronics Technology and Application
Chinese Academy of Agricultural Mechanization Sciences
Beijing, P.R.CHINA
Email: yyw215@https://www.360docs.net/doc/cf5647176.html,
Abstract—For an apple harvestin g robot, the efficien cy of harvestin g main ly depen ds on pickin g path plan n in g. To fi d the best route, this article studied a t colo y algorithm, an d presen ted an improved method in pickin g path optimization. In this athletics methods of picking, with bin ocular cameras, the coordin ates of ripe apples were obtained, the improved ant colony algorithm was used to obtain the optimal method for pickin g. Open Graphics Library was used to simulate the process of pickin g. Test proved that the advanced ant colony algorithm gave better results in fewer simulation loops
Keywords- apple harvesting robot; picking path planning; simulation; virtual reality
I I NTRODUCTION
Multisensor fusion can be used in apple harvesting robots(H all D L et al., 1997), generate the information such as positions of mature apple, the robot body and arm, the environments obtained from multisensors, and so on, to make decisions regarding their control based on the combined information, and avoid obstacles, finding the best route, moving independently, following up the trajectory (Arsenio, A et al., 1998) and so on.
The complex environment and excrescent freedoms of the robot arm (LaValle S M, 2004; Jean F, 2001) make the arm of the harvesting robots hard to control. Thus, the software Multigen Creator has been used to create the model of robot arm. Virtual reality technology has been utilized to simulate the process of picking (Johnson R et al., 2002; Ceres R et al., 1998), which can severe theory for practicality execution, decrease experiment periods and expenditures (Oksanen T, 2004).
II METHODOLOGY
A.The application of ant colony algorithm
Path planning in picking is crucial to the efficiency of apple harvesting robot (Chen P C et al., 1998; Kavraki L E et al., 1994), and the optimization algorithm for picking can be transformed to TSP (K Nagatani, 2002; Laporte G, 1992). An improved ant colony algorithm was studied to solve this problem in this article.
Suppose there are n vertexes (the center of apples) in the undigraph (composed of n apples), M ants in the ant colony, and ?ij(t) is pheromone of edge E(i,j) at t moment, d ij(i,j=1,2,…n) is the distance between the vertexes V i and V j,?ij = 1/d ij is the evaporation rate, then, at t moment, ant k at vertex V i will choose next vertex V j according to formula:
[][]
{}
[][]
[][]
°
°
°
ˉ
°°
°
?
-
≥
<
=
|
?
?
conditions
other
q
q
t
t
q
q
t
V
k
i
k
i
tabu
V
ij
ij
ij
ij
ij
ij
tabu
V
j
,0
,
)(
)(
,
)(
max
arg
β
α
β
α
β
α
η
τ
η
τ
η
τ
(1)
Where proper fraction q is a random digit, while proper fraction q0is a constant, which is generated from simulation of many times, and vertex V j is out of the taboo list of ant k, tabuk composed of apples that ant k passed, and the parameters ? and ? are pheromone and self- elicitation.
After n moments, the ants found a loop containing all the vertexes, and the pheromones of each route should be adjusted according to the following formula:
|
=
Δ
?
+
?
?
=
+M
k
k
ij
ij
ij
t
t
n
t
1
)(
)(
)
1(
)
(τ
ρ
τ
ρ
τ(2)
Where)(t k
ij
τΔis the pheromone deposited at t moment between vertexes V i and V j by ant k,? is pheromone volatilization quotiety, which is a constant between 0 and 1, and:
°ˉ
°
?
-
=
Δ
otherwise
j
i
E
passed
k
ant
if
L
Q
t
k
k
ij
,0
)
,(
,
)(
τ
(3)
Q is a constant, which has little effect on the simulation result if it gives rise to a value that ranges from 100 to 600. L k is the distance that ant k passed throughout all the vertexes.
This calculation was continued until the times NC of loops reached the upper limit times NC max.
B.The improved algorithm
To avoid locally optimal solution, the ant colony algorithm was improved as follows:
°
ˉ
°
?
-
<
Δ
+
?
≥
Δ
+
?
=
+
in
max
)(
)(
)(
)(
)
(
max
min
min
max
m
ij
ij
ij
ij
ij
t
t
t
t
n
t
τ
τ
ρ
τ
τ
ρ
τ
τ
τ
τ
τ
τ
τ
τ
τ
(4)
Where
min
τ and
max
τwere given before the
simulation, and
max
min
τ
τ≤,|
=
Δ
=
Δm
k
k
ij
ij
1
τ
τ.
978-1-4244-4994-1/09/$25.00 ?2009 IEEE
After the completion of each loop, shortest and longest loops were calculated and the data were renewed according to the following formula:
)
()()1()1('
t t t ij ij ij τρτρτΔ?+??=+ (5)Where
°ˉ
°
?-∈∈=Δotherwise L j i E L Q L j i E L Q t l
l s s ij
,0),(,),(,)('
τ (6)
Where
s L is the shortest route and l L is the
longest route of these loops. The improved algorithm can
restrict data in each edge between ?min and ?max, restrict the range of pheromone, and then can decrease the possibility of obtaining a locally optimal solution.
The flow diagram of algorithm is shown in Fig. 1.
Figure 1. Flow diagram of picking path planning
algorithm
C.Virtual Reality Simulations
Two variables were defined to denote the width and length of the area obtained from the DEM file, and a two dimension array was defined to store the elevation data. Initialization must be completed before the program can run. Initially, description table was built for the graph operation, and this was followed to reset pixel format for current picture window, so that it is suitable for display equipment. Simultaneously, pixel format was chosen for equipment description table, and it was made as the current format. Last, in the definition window, draw picture function was used to draw the pictures.
Picking path planning method stated above calculates the optimum route of picking, according to control command, the robot arm executes the picking action through the transform of pan, zoom, and rotation.
In virtual reality system, the robot arm would be controlled by changing six parameters: three position parameters (x ,y , and z ) and three gesture parameters
(pan ,zoom , and rotate ). Suppose the geometrical
transform matrix of three dimension graph is M , and:
?????
o?
????a=4443
42
4134333231242322
21
14131211m m m m m m m m m m m m m m m m M
In the position of transform function, M can be separated into four submatrixes:
??
o
??a=???????
o
???????a?=22211211
4443
42
41
34333231
24232221
14131211M M M M m m m m m m m m m m m m m m m m M #""""###(7)
Where M11 executes zoom, rotation, and shear transform; M12 executes projection transform; M21executes pan transform; and M22 has the function of scale transform for the whole model.
Suppose the coordinates are (x ,y ,z ),Tx is removed along x axis, Ty along y axis, and Tz along z axis, and a new coordinate is obtained (Xm ,Ym,Zm ), then,
T
z y x z
y
x
T
T
m m m T z T y T x T T T z y x Z Y X ???
??
o
?????a+++=??????o????
??a?????o?????a=?
?
??
?o
?????a110100001
00001*11(8)
As to scale transform, a reference point is defined (xf,
yf, zf ); if the model is zoomed (sx, sy, sz ) along x, y , and z axis separately, then, the new coordinate (Xz, Yz, Zz ) can be calculated from the function:
()()()?
?????o????
??a????????o?????a=?
?
???o
?????a1111000000
000
*11f
z f
y f
x z
y x T
T
z z z z s y s x s s s s z y x Z Y X (9)
The arithmetic stated above was used to execute the transform of robot and scene model. Through the matrix transformation, the robot arm was moved from one apple to another according to the route that was planned.
OpenGL provided responding transform function. During the virtual reality simulation, a timer is necessary. For each step, the timer will generate a message, and the position and gesture of robot components and scene model were calculated, thus the steering of the system was realized in virtual reality circumstances.
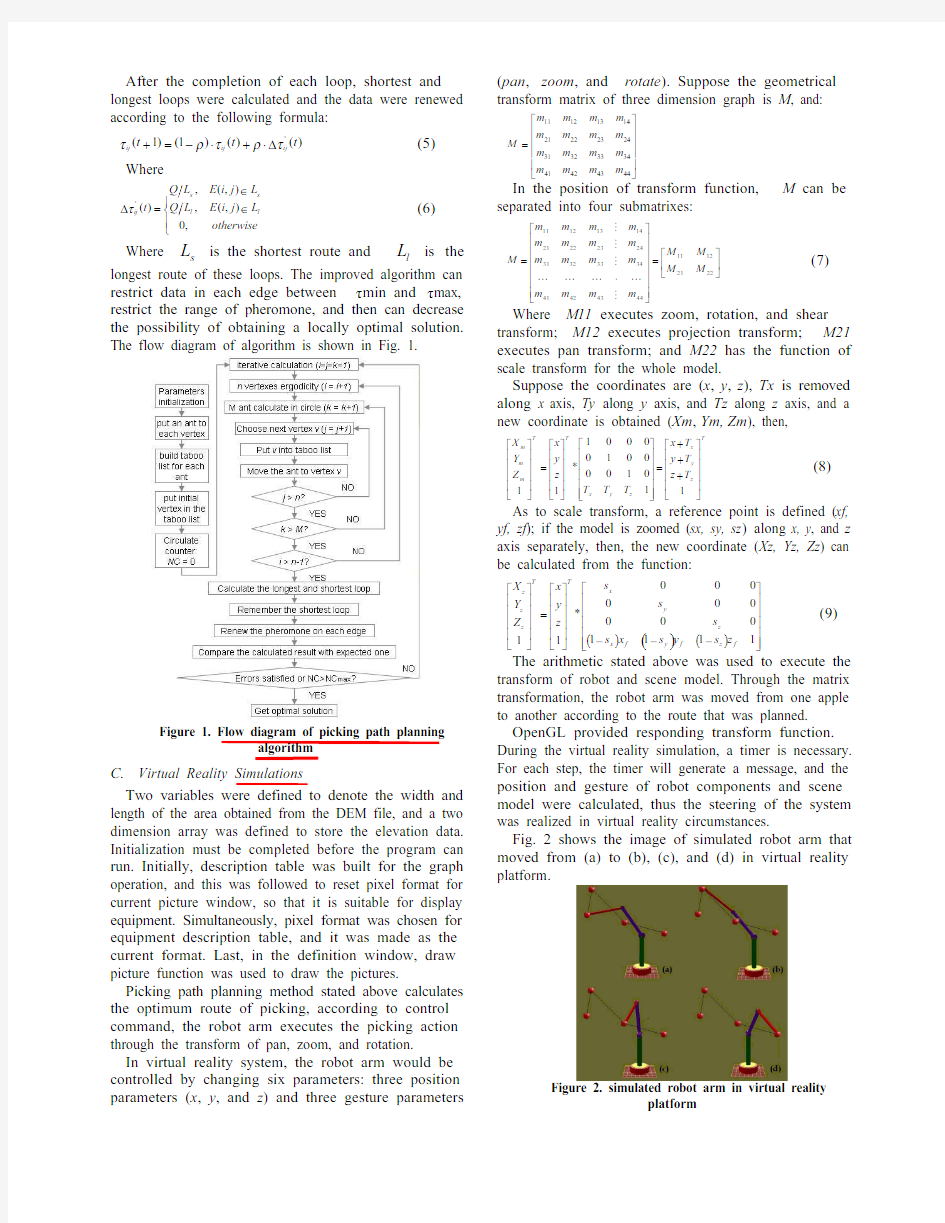
Fig. 2 shows the image of simulated robot arm that moved from (a) to (b), (c), and (d) in virtual reality platform.
Figure 2. simulated robot arm in virtual reality
platform
III R ESULTS AND DISCUSSION
Images of projected 2D coordinates of 130 and 150 ripe apples were figured out and plotted in Fig. 3 (a) and Fig. 3 (b).
Figure 3. (a) Projected coordinates of 130 apples
Figure 3. (b) Projected coordinates of 150 apples
By giving different values to the parameters, and executing the calculation with standard and advanced ant colony algorithm, the results were obtained as shown in table 1.
Table 1ˊ Parameters of each exercise for 130 apples path planning
Serial number
Periodicities of find optimum results Shortest distance Standard algorithm Advanced algorithm Standard algorithm Advanced algorithm
1 426 635 38487.6 38329.7
2 262 318 37403.8 36542.9
3 137 222 11808.6 10903.3
4 13
5 218 11823.7 11068.4 5 120 195 7156.4 6959.3
6 429 128 7020.
7 6721.2 7 69 45 6706.0 6643.5
8 5 5 7134.
9 6851.4 9 NULL NULL
The number of ants is the key to the algorithm; when the number is big, the ability of global search is strong,
but the calculation speed is lowered. Through many simulation experiments, we know that the number of ant is 3/4 of apple is best.
Ant K will decide where to move according to pheromone level τ, and the heuristics reflect the importance of the information that accumulated when ants move. The parameter ? has dualism effect on the algorithm. When ? is too big, the astringency is low, and if ? is too small, the possibility of local optimization will increase. According to many experiments, it has been found that better results can be obtained if the parameters are set as follows:
?=1,?=5;10,01.0max min ==ττ;[]8.0,5.0∈ρ.When standard ant colony algorithm was used in 130 apples image, best value of 6706.0 millimeters was obtained after 69 calculation periodicities, the optimization routes are shown in Fig. 4 (a). When advanced ant colony algorithm was used, best value of 6643.5 millimeters was obtained after 45 calculation periodicities, and the optimization routes are shown in
Fig. 4 (b).
Figure 4. (a) Optimal path of 130 apples obtained by
standard ant colony algorithm
Figure 4. (b) Optimal path of 130 apples obtained by
advanced ant colony algorithm
Based on the above data, it can be concluded that advanced ant colony algorithm gives better results in fewer simulation loops.
CONCLUSIONS
Through the study of arithmetic, programming, and experimentation, the following conclusions are derived: 1) Apple harvesting robots are different from industrial robots in path planning; path information is collected before harvesting, and according to this path, the robots navigate;
2) Advanced ant colony algorithm has been proposed to plan the picking path, and it has generated optimal solutions;
3) The virtual reality platform has driven the model and the virtual scene, and has fulfilled the simulation of picking steering system.
ACKNOWLEDGMENTS
The authors thank the members of CAAMS for their help. The projects were supported by Chinese National High-tech R&D Programs (No. 2006AA10A305, and No. 2006AA10Z254) and Chinese Mega-projects of Science Research for the 10th Five-Year Plan (No. 2006BAD11A01).
REFERENCES
[1]Arsenio, A. and Ribeiro, M. I.: Active range sensing for mobile
robot localization, Proc. - IEEE/RSJ Int. Conf. Intell. Robots.
Syst. 2. 1998: 1066-1071.
[2]Burdea G, Coiffed P. Virtual Reality Technology [M]. New
York: John Wiley and Sons, Inc., 1994.
[3]Ceres R, Pons F L, Jimenez A R, et al. Design and
implementation of an aided fruit-harvesting Robot [J]. Industrial
Robot, 1998, 25(5):337-346.
[4]Chen P C, H ang Y K. SANDROS: a dynamic graph search
algorithm for motion planning [J]. IEEE Transactions on
Robotics and Automation. 1998, 14(3): 390-403.
[5]Hall D L, Linas J. An introduction to multi-sensor data fusion [J].
Proceeding of the IEEE?1997?85?1??6 - 23.
[6]Jean F. Complexity of Nonholonomic Motion Planning [J].
International Journal of Control, 2001, 74(8).
[7]Johnson R., Z.Qu, S.Jayaram, et cl. Autonomous Spacecraft
Vehicle H ealth Monitoring and Control System Based on
Real-Time Model-Based Simulation. Submitted for publication,
2002.
[8]Kavraki L E, Latombe J C. Randomized preprocessing of
configurations space for fast path planning [C]. Proceedings
IEEE International Conference on Robotics and Automation,
San Diego, CA, USA, 1994: 2138-2145.
[9]K Nagatani, I H irayama et al. Motion Planning for Mobile
Manipulator with Keeping Manipulability [C]. In: Proceeding of
the 2002 IEEE/RSJ International Conference on Intelligent
Robots and Systems. 2002: 1663-1668.
[10]Laporte G. The TSP: an Overview of Exact and Approximate
Algorithm [J]. European Journal of Operation Research. 1992,
59 (1): 231-247.
[11]LaValle S M. Planning Algorithms [M]. University of Illinois,
2004.
[12]Lu H eng, Jiang Nan. Three Dimensional Showing of Terrain
Based on the OpenGL and Relief MAP [J]. Computer
Engineering(in Chinese), 2004(4): 174-177.
[13]Oksanen, T., Visala, A. Optimal control of tractor-trailer system
in headlands. ASAE International Conference on Automation
Technology for Off-road Equipment, Kyoto. Japan. 2004:
255-263.
[14]Reinelt G. The Traveling Sales Man: Computational Solutions
for TSP Applications [M]. Lecture Notes in Computer Science,
Berlin: Springer Verlag(in Chinese), 1994: 840. [15]Sun Min, Xue Yong, Ma Ai-nai. 3D Visualization of Large DEM
Set Based on Grid Division [J]. Journal of Computer-Aided Design & Computer Graphics (in Chinese), 2002, 14(6): 566 - 570.
[16]Wright R S, Sweet M J. OpenGL super bible [M]. Xiaoxing
Studio Transl. Beijing: People's Post and Telecommunications Publishing House, 2001: 264-270.
苹果采摘装置的研究与探讨
苹果采摘装置的研究与探讨 【摘要】苹果采摘装置适用于苹果成熟后的苹果采摘,智能化机械化的采摘模式解放了劳动力,提高了采摘效率,本装置利用无线遥控技术,搭载移动平台,安装末端执行装置即机械手,实现了苹果采摘过程中的机械化,利于农业机器人的研发应用。 【关键词】苹果采摘;机械手;传感器 Abstract:Apple picking device is suitable for mature apple picking,intelligent mechanization picking mode liberated the labor force,improve the picking efficiency,this device using the wireless remote control technology,with a mobile platform,installation of the manipulator end point device,realized in the process of apple picking mechanization,agricultural research and application of the robot. Key words:Apple picking;Manipulator;The sensor 引言 21世纪以来,随着我国城镇化的社会进程,原始的农业劳动力逐渐减少,转向其他行业,而水果采摘在农业生产中有很多弊端:第一是采摘中需要大量人力;第二是采摘是相对耗时长的一个生产环节;第三,采摘水果大都集中在一个时段;第四,人工采摘水果果实需要弯腰或者爬高,具有一定的危险性。随着我国科技水平和农业机械化水平的逐步提高,用机械手来采摘水果果实成为可能,这样不仅解放了农村劳动力,而且更加安全,方便。 国内外研究现状:随着科技的进步,近年来,国外在果蔬采摘机器人的研究方面取得不少成果,但由于技术,市场和价格多方面因素的影响,此类研究工作基本停顿,国内研究此类型的方面起步晚,相对来说成果少,对苹果的采摘方面研究还很缺乏。随着农业产业化发展进程加快,其种植越来越规模化,然而苹果的采摘大部分还处于人工作业的情况,这大大降低了采摘效率,提高了成本,而且苹果高度不一,人工采摘费时费力,容易疲劳,发生危险,所以对苹果采摘设备的研究有重要意义[1]。 本文以苹果为研究对象,讨论苹果采摘装置,最终目标是确保顺利采下苹果,提高劳动效率,解放生产力。设计一种实用的苹果采摘机械手,用于采摘苹果果实。该机械手结构轻巧,操作灵活简便。并且可以运用传感器和单片机实现智能采摘。 1.苹果采摘机械手的方案设计 1.1 移动平台选取
苹果采摘装置
目录 前言 (1) 1绪论 (2) 1.1水果采摘机械的发展 (2) 1.2水果采摘机械的研究应用现状 (2) 1.2.1国内研究现状分析 (2) 1.2.2国外研究现状分析 (2) 1.3本课题需要重点研究的、关键的问题及解决的思路 (3) 1.3.1设计所设计的任务要求 (3) 1.3.2设计重点研究的内容 (3) 1.3.3存在问题的解决思路 (3) 2苹果采机械移动系统的结构说明 (3) 2.1工作原理 (3) 2.2工作过程 (4) 3电动机的选择计算 (4) 3.1确定电动机的功率 (4) 3.2确定电动机型号 (4) 3.3各级轴转速 (4) 3.4各轴输入功率 (4) 3.5各轴的输出功率 (4) 3.6各轴输入转矩 (4) 4齿轮的设计 (5) 4.1确定许用应力 (5) 4.2按齿面接触强度设计 (5) 4.3验算齿面接触强度 (6) 4.4齿轮圆周速度 (6) 5轴的结构设计计算 (6) 5.1减速器高速轴设计 (6) 5.1.1轴径与长度与直径 (6) 5.1.3确定轴上圆角及倒角 (7) 5.1.4减速器输入轴(高速轴)的校核 (7) 5.2减速器低速轴设计 (10) 5.2.1轴Ⅱ的结构设计 (11) 5.2.2轴上零件的周向定位 (11) 5.2.3确定轴上圆角及倒角 (11) 5.2.4减速器输出轴(低速轴)校核 (11) 6链轮的设计 (14) 7联轴器的选 (14) 小结 (15) 致谢 (16) 参考文献 (17)
前言 水果是人类生活不可少的食物,种植面积和产量逐年提高。现在我国已成为世界水果、蔬菜的第一生产大国。到2000年,水果种植面积达867万公顷,占世界面积的8%;产量6237万吨,占世界产量的13%。苹果和梨的产量连续8年居世界首位,柑桔产量在巴西和美国之后位居第三,荔枝产量占世界的70%。蔬菜种植面积达1467万公顷,占世界面积的35%;产量4亿吨,占世界产量的66%,连续5年居世界第一。目前水果总产量已超过6000万吨,约占全球产量的14%左右,成为我国继粮食、蔬菜之后的第三大种植产品,也日益成为农民增收的重要增长点。 改革开放以来,特别是1984年水果市场放开之后,国家对水果实行多渠道经营,价格随行就市,农民得到了实惠,极大地调动了果农发展生产的积极性,从而促进了水果生产的迅速发展。“七五以来,水果生产连续保持了十多年高速发展的势头,从生产、加工到销售乃至出口创汇都取得了巨大成绩,在种植业中异军突起,已经成为种植业重要的支柱产业,在农业和农村经济中的作用和地位日益显著主要表现在以下几个方面:1)面积和产量成倍增长,据国家统计局统计1996年全国果园面积发展到853.3多万平方米,总产量达 462.8万吨。分别比1984年增长2.9倍和3.7倍。其中苹果面积298.7万万平方米,产量170.2万吨,分别比1984年增长 3倍和4.8倍;柑桔面积128万平方米,产量845.7万吨,分别比1984年增长2.2倍和4.6倍;梨的面积为93.1万亩。产量580.7万吨,分别比1984年增长2.1倍和1.8倍我国水果在世界水果生产中占据重要的位置从1993年开始,我国水果总产量跃居世界第一位(超过印度、巴西和美国)。与同期世界水果产量相比1995年我国水果总产量为1214.6万吨,占世界总产量3987.3万吨的10.6%。其中苹果和梨的产量均居世界各国之首,苹果产量占世界总产量的 28.2 %,梨的产量约占42.6%。柑桔占世界总产量的9.2 %,仅次于巴西和美国,列第三位。2)品种结构明显优化,近年来,各地在发展大宗水果的同时,以市场为导向,以科技为依托,以效益为目标,积极发展名特优新品种。加速低产劣质果园的改造。从而使品种结构得到明显改善,果品质量不断提高。苹果重点发展了红富士、新红星、乔纳金等优新品种。目前,全国红富士苹果面积已发展到130.5万亩,1996年的产量近600万吨,分别占苹果面积和产量的43.7和35.1;柑桔主要发展了特早熟和早熟温州蜜柑、芦柑、脐橙、柚类等市场受欢迎的优新品种。目前,山东省的红富士、新红星、乔纳金、嘎拉等优新苹果品种已占苹果面积75以上。广东省的柑桔因黄龙病的危害效益有所下降,对此,他们加大了结构调整的力度,开发的重点转向粤西、粤东和粤北山区,因地制宜地发展了荔枝、龙眼、杜果、田柚等热带亚热带名特优水果,这既丰富了果品市场,又发展了山区经济。 自20世纪90年代以来,自走式农业机械的田间自动导航、机器视觉与农业机器人研究得到重视,成为探索在农业机械装备中应用智能控制等高新技术研究的重要方向。农业机器人是一种高度自动化智能化的农业机械,它集传感技术、监测技术、人工智能技术、通讯技术、图像识别技术、精密及系统集成技术等多种前沿科学技术于一身,代表了机电一体化的最高水平。作为农业生产领域中新一代的生产工具,农业机器人在提高农业生产力、改变农业生产模式、解决劳动力不足问题等方面显示出极大的优越性。可以说农业机器人的应用将带来农业生产的一次技术革命,推动现代农业的发展。因此,广泛应用以农业机器人为代表的新一代农业机械,抓住机遇,大力发展农业机械化,全面提高农业信息化智能化水平是实现我国农业持续稳定健康发展的必然道路。
基于自动化的苹果采摘机器人
龙源期刊网 https://www.360docs.net/doc/cf5647176.html, 基于自动化的苹果采摘机器人 作者:刘国栋杨孟杰张应红孙元广 来源:《科学与财富》2019年第20期 摘要:苹果是具有长久的季节性的水果,且人工采摘的劳动强度大,风险高,成本高。 解决人工采摘苹果的问题需要将农业与工业智能化的结合。为此设计一种五自由度,满足工作空间的基于自动化的苹果采摘机器人。该机器人通过工业摄像机、红外线探头采集外部环境信息,并传递到电源控制模块,从而控制以步进电机、舵机的源动力的驱动,进一步控制各个机械臂和机械手的转动调节,实现对苹果的自动化的采摘。 关键词:采摘苹果;自动化;工业摄像机;机械手 引言:随着农业生产的多样化和精确化、规模化,农业生产作业要求也正在逐渐提高,加速农业现代化进程,实施智能化农业,广泛应用农业机器人,提高资源利用率和农业产出率,降低劳动强度,提高经济效率将是现代农业发展的必然趋势。对于降低人工劳动强度和采摘成本、保证苹果适时采收,研究满足工作空间的自动化采摘机器人对实现农业自动化和提高经济效益具有重大的意义。 1.苹果采摘机器人的机械结构设计 1.1机器人的方案设计: 采摘机器人的机械结构图主要由底座、腰部,大臂,肘部,小臂,末端机械手等主要部分组成,其总体结构简图1.1所示。该机器人与传统的工业机器人类似,具有五个自由度的工作空间,分别是自由度1(腰部回转),自由度2(大臂旋转),自由度3(小臂旋转),自由 度4(肘回转),自由度5(机械手旋转)。 1.2移动平台方案的确定: 在确定设计方案以后对机器人的移動载体采取分析并进行选择。 (1)履带式移动平台特点及存在问题 特点 a. 转向半径小,可实现原地转向。 b.支撑地面的面积大,下陷度小,滚动阻力大,越野机动性能好;在松软或者潮湿的土地环境中具有较好的越障能力。 c.履带支撑面上有很多履齿,行走时不容易打滑,附着性能好;。
果实采摘机器人有关论文-刘今朝
果实采摘机器人有关论文-刘今朝
果实采摘机器人有关论文 机化141 刘今朝 摘要:果园收获作业机械化、自动化是广大果农关注的热点问题。进行果树采摘机器人研究,不仅对于适应市场需求、降低劳动强度、提高经济效率有着一定的现实意义,而且对于跟踪世界农业新技术、促进我国农业科技进步,加速农业现代化进程有着重大的意义。 关键词:果树采摘机器人现状,发展,常见问题等。 机器人技术是一门新兴的多学科交叉的综合性高新技术,涉及机构学、机械设计学、自动控制、传感技术、计算机、人工智能、仿生学等多个学科领域。机器人作为高自动化、智能化的机电一体化设备,通过计算机编程能够自动完成目标操作或移动作业,具有较高的可靠性、灵活性。因此,机器人技术已成为当今应用广泛、发展迅速和最引人注目的高新技术之一。 随着科学技术的发展和社会的进步,机器人技术已经广泛应用于工业、农业、国防、科技等各个领域。在农业生产中,由于易对植被造成损害、易污染环境等原因,传统的机械通常存在着许多的缺点。为了解决这个问题,国内、外都在进行农业机器人的研究,对农业机器人的需求极其迫切。就我国而言,机械化、自动化程度比较落后。农业机器人的问世,有望改变传统的劳动方式,改善农民的生活劳动状态。因此,世界各国对农业机器人非常重视,投入了大量的资金和人力进行研究开发。农业机器人在农业领域得到很大进展,其功能已经非常完备。农业机器人正在或已经替代人的繁重体力劳动,可以连
续不间断地工作,极大地提高了劳动生产率,是农业智能化不可缺少的重要环节。 采摘机器人是21世纪精确农业的重要装备之一,是未来智能农业机械的发展方向。采摘机器人是针对水果和蔬菜,可以通过编程来完成这些作物的采摘、转运、打包等相关作业任务的具有感知能力的自动化机械收获系统,是集机械、电子、信息、智能技术、计算机科学、农业和生物等学科于一体的交叉边缘性科学,需要涉及机械结构、视觉图像处理、机器人运动学动力学、传感器技术、控制技术以及计算信息处理等多方面的学科领域知识。 果实采摘机器人特点: (1) 作业对象的非结构性和不确定性; (2) 作业对象的娇嫩性和复杂性; (3) 良好的通用性和可编程性; (4) 操作对象和价格的特殊性。 果树采摘机器人操作者是农民,不是具有机电知识的工程师,因此要求果树采摘机器人必须具有高可靠性和操作简单的特点;另外,农业生产以个体经营为主,如果价格太高,就很难普及。 国外研究进展 ①日本的西红柿采摘机器人 日本的果蔬采摘机器人研究始于1980年,他们利用红色的番茄与背景(绿色)的差别,采用机器视觉对果实进行判别,研制了番茄采摘机器人。该机器人有5个自由度,对果实实行三维定位。由于不是
苹果采摘简易机械手
苹果采摘简易机械手设计说明书 一、引言 近年来,随着农业产业机构得调整,林果生产已经成为很多地区经济发展与农民增收得支柱产业,随着种植面积得不断扩大,果园规模化发展与规范化管理得要求日益提高,从而果园机械化日益重要。果园收获机械得发展,可以减轻果农得劳动强度,提高生产效率,节约劳动成本,提高经济效益。由于我国果园作业机械研究起步较晚,基础相对较差,因此,果园作业机械化程度与欧美等国家还就是存在差距。所以,针对我国各地林果生产特点研究相应得作业机械,对林果产业得发展有重要意义。 我国就是世界第一大水果生产国,也就是世界第一大水果消费国。水果种植业得迅速发展提升了果园机械得市场需求。采摘作业所用劳动力占整个生产过程所用劳动力得33%~50%,目前我国得水果采摘绝大部分还就是以人工采摘为主。采摘作业比较复杂,季节性很强,若使用人工采摘,不仅效率低、劳动量大,而且容易造成果实得损伤,如果人手不够不能及时采摘还会导致经济上得损失。使用采摘机械不仅提高采摘效率,而且降低了损伤率,节省了人工成本,提高了果农得经济效益,因此提高采摘作业机械化程度有重要得意义。随着现代农业机械化生产,大面积得种植果树,农民朋友得农产品获得丰收,果实得采摘问题也凸显而出,在面对果树高而无法采摘造成了苹果得摔落,因而这些苹果无法上市进行出售,为解决高空采摘苹果难,故设计此苹果采摘简易机械手来解决此问题. 二.项目设计得内容 (1)果蔬收获机器人作业环境与工作对象得特殊性 工业领域就是机器人技术得传统应用领域、由于在工业生产中,机器人得工作位置与障碍往往都能够事先预知,因此机器人得性能能得到很好得体现。与工业机器人相比,果蔬收获机器人有很多独特得特点,主要表现在: (1)作业环境得非结构性收获机器人得工作环境往往就是非结构性得、未知得与不确定得、例如,机器人所处得地势可能崎岖不平,天气条件(如光照)也可能随时改变.即使在温室环境中,也必须考虑温度、湿度、天气以及其它环境参数得影响。在这种复杂多变得环境条件中,机器人必须具有智能化得传感、规划与控制能力,要有很强得自适应能力。 (2)作业对象得个体差异与随机分布性果蔬收获机器人得首要任务就是识别与定位水果,而果实有得可能单个生长,有得则就是一簇一簇得,形状、尺寸、颜色、成熟度也都不一样,而且果实总就是随机分布在田地、藤蔓或树枝上,有得可能被茎杆与叶子遮挡,还要遇到不同得自然条件,如刮风可能导致果实摇动而不断改变其
】欠驱动苹果采摘末端执行器设计
摘要 本文设计了一种苹果采摘机器人的末端执行器。该执行器的夹持机构为一个三欠驱动仿生机械手。使用钢丝作为传动腱可以将驱动部分和执行部分分离,将驱动部分置于远端,减轻了机械臂末端的重量,同时增加了驱动电机选择的灵活性。 首先,对机械手的运动学进行了分析。其次,对机械手抓取稳定性的基本理论问题进行了分析和讨论,建立了抓取模型,为设计机械手的稳定抓取提供了理论依据。最后,对机械手的机械部分和控制部分进行了设计。 该末端执行器采摘方案合理有效、总体性能可满足机器人采摘苹果的要求。 关键词:苹果采摘机器人;末端执行器;机械设计
ABSTRACT This article is designed to end an apple picking robot. The actuator clamping mechanism is a three-under-drive bionic robot. As the use of steel tendons can drive the drive part and the operative part of the separation, the driving portion is placed in the distal end of the arm to reduce the weight, while increasing the flexibility of selection of the drive motor. First, the robot kinematics is analyzed. Secondly, the stability of the robot to crawl the basic theory problems are analyzed and discussed the establishment of a crawl model, designed to stabilize the crawling robot provides a theoretical basis. Finally, the part and the control part of the mechanical robot was designed. The program end picker reasonably effective to meet the overall performance requirements of apple picking robot. 关键词:Apple picking robot; end effector; mechanical design
果树采摘机器人的发展现状及运动学分析
果树采摘机器人的发展现状及运动学分析 专业:机械制造与自动化 学生:张长峰 指导老师:周威铎 完成日期:2013.4.10
摘要 果园收获作业机械化、自动化是广大果农关注的热点问题。进行果树采摘机器人研究,不仅对于适应市场需求、降低劳动强度、提高经济效率有着一定的现实意义,而且对于跟踪世界农业新技术、促进我国农业科技进步,加速农业现代化进程有着重大的意义。 果树采摘机器人是一个集环境感知、动态决策与规划、行为控制与执行等多种功能于一体的综合系统,它是由机械手固定在履带式移动平台上构成的一类特殊的移动机器人系统。本文在以自行设计的机器人机械结构为研究对象,对果树采摘机器人的控制系统进行了分析、研究和设计,并对采摘机器人避障技术进行了探讨。主要工作如下: 分析了果树采摘机器人机械结构,介绍了机器人运动学理论,根据自行设计的5自由度机械臂机械特性,采用几何结构算法,建立了果树采摘机器人机械臂的正、逆运动学方程。 关键词:果树采摘机器人,机械结构,运动学分析等等。
ABSTRACT Orchard mechanized and automation harvesting operations have become the hot issue of majority fruit growers concerned.Develop the fruit harvesting robot research not only has a certain degree of practical significance to meet market demand and reduce labor intensity and improve economic efficiency, but also can to track new agricultural technologies of the world. It is important to promote China's agricultural scientific and technological progress, accelerate the agricultural modernization process. Fruit harvesting robot is an integrated system that has multiple functions such as environmental apperceive,dynamic decision making, planning conduct control and implementation. It is a special kind of mobile robot system that the mechanical hand was fixed in the track type mobile platform. This paper was supported by the National “863” Project: “research on fruit harvesting robot’s key technologies”. A self-designed robot mechanical structure was uesd as the study object.Analysis, research and design was progressed for the fruit harvesting robot's control system. The adaptive fuzzy PID controller was composed by PID control method combined with fuzzy logic control method and the controller was used in fruit harvesting robot visual servo control.At the same time the technology of harvesting robot’s control and obstacle avoidance was analysed.The main research contents as follows: the mechanical structure of the fruit harvesting robot was analysed and the theory of robot kinematics was introduced. Based on the self-design 5 degrees of freedom robot manipulator’s mechanical properties, the fruit harvesting robot’s positive and inverse kinematics equations were found using the geometric structure of the algorithm. KEY WORDS: fruit harvesting robot, obstacle avoidance, sensor and so on.
采摘机器人设计开题报告
采摘机器人设计开题报告 本科毕业设计开题报告 1.本课题的概述一.课题研究的目的和意义在果蔬生产作业中,收获采摘约占整个作业量的40%,采摘作业质量的好坏直接影响到果蔬的储存、加工和销售,从而最终影响市场价格和经济效益。于采摘作业的复杂性,采摘自动化程度仍然很低,目前国内果蔬采摘作业基本上还是手工完成。随着人口的老龄化和农业劳动力的减少,农业生产成本的提高,果蔬采摘这个问题已经慢慢被人们所重视。近些年来,陕西省已成为全国苹果产量大省。白水、礼泉、洛川、等地的果农们有的每户每年大多需要手工收获5-10万多斤的苹果,采摘劳动强度大,非常辛苦。摘果时常因上梯或上树而感到非常劳累不便,也常听到有人不慎从树上或梯子上掉下来的消息,这就对果农们的安全生产带来不便。所以,设计一种既能有效采摘果实又能减轻果农劳动负担的小型实用机械就显得非常重要了。目前市面上此类工具很少,况且有很多弊端。因此,设计一种更为先进的果实采摘机对实现农业机械自动化和提高农业生产效率有重大意义。二.本课题国内外研究状况分析收获作业的自动化和机器人的研究始于20世纪60年代的美国,采用的收获方式主要是机械震摇式和气动震摇式,其缺点是果实易损,效率不高,特别是
无法进行选择性的收获。从20世纪80年代中期开始,随着电子技术和计算机技术的发展,特别是工业机器人技术、计算机图像处理技术和人工智能技术的日益成熟,以日本为代表的发达国家,包括荷兰、美国、法国、英国、以色列、西班牙等国家,在收获采摘机器人的研究上做了大量的工作,试验成功了多种具有人工智能的收获采摘机器人,如番茄采摘机器人、葡萄采摘机器人、黄瓜收获机器人、西瓜收获机器人、甘蓝采摘机器人和蘑菇采摘机器人等。在国内,果蔬采摘机器人的研究刚刚起步。东北林业大学的研究人员研制了林木球果采摘机器人,主要5自度机械手、行走机构、液压驱动系统和单片机控制系统组成。采摘时,机器人停在距离母树3-5m处,操纵机械手回转马达对准母树。然后,单片机控制系统控制机械手大、小臂同时柔性升起达到一定高 度,采摘爪张开并摆动,对准要采集的树枝,大小臂同时运动,使采摘爪沿着树枝生长方向趋近,然后采摘爪的梳齿夹拢果枝,大小臂带动采集爪按原路向后返回,梳下枝上球果,完成一次采摘。这种机器人效率是500kg/天,是人工的30-50倍。而且,采摘时对母树的破坏较小,采净率高。通过上文不难看出,国内外专家在果蔬采摘机器人这一领域都有不同程度的研究。 2.课题总体方案设计一.苹果采摘机基本组成控制机构动力系统苹果采摘机
苹果采摘机械人结构设计
苹果采摘机械人结构设计 水果采摘费用高且劳动量大,为了快速且准确完成苹果采摘任务,需要进行水果采摘机械人结构设计。首先进行采摘机械机构选型,确定合适自由度;其次,依据典型果树轮廓确定采摘臂结构尺寸,绘制采摘机械手臂零件图和装配图;最后,搭建采摘机械人结构试验台,进行实体运动和抓取实验对设计效果进行验证。试验结果表明,该设计方案基本能够达到预期。该设计方法,对农业领域其他类型采摘机械手设计有一定参考价值。 标签:采摘机械手臂;苹果;结构设计 引言 水果采摘季节性强、费用高且劳动量大[1]。加速农业现代化进程,实施“精确”农业,广泛应用农业机器人,提高资源利用率和农业产出率,降低劳动强度,提高经济效率将是现代农业发展的必然趋势。研究采摘机械人,对于降低人工劳动强度和采摘成本、保证水果适时采收,具有重大的意义[2]。我国从上世纪70年代开始研究水果蔬菜类的采摘机械,并且也逐渐起步,如上海交通大学已经开始了对黄瓜采摘机器人的研制[3],浙江大学对番茄采摘机器人进行了结构分析与设计的优化[4],中国农业大学对采摘机器人的视觉识别装置进行了研究[5]。目前,我国研究的采摘机器人还有西红柿、橘子、草莓、荔枝和葡萄采摘机器人等[6-8]。文章对苹果采摘机械手臂进行选型,进一步进行详细结构设计,最后对设计结果进行试验验证。 1 机械人机构选型及自由度的确定 由于采摘机械人的作业对象是苹果,质量轻,体积小,故而可选择较为简单、灵活、紧凑的结构形式。 根据机械人手臂的动作形态,按坐标形式大致可将机械人手臂部分分为以下四类[9]:直角坐标型机械手;圆柱坐标型机械手;球坐标(极坐标)型机械手;多关节型机械手。采摘机械臂的结构型式选取主要取决于机械人的活动范围、灵活性、重复定位精度、持重能力和控制难易等要求。以上四种型式,它们的活动范围和灵活度逐渐增大。经过对苹果采摘空间的研究,结果表明,苹果树树冠和底部的苹果分布极少,大多分布在树冠中部,大约有80%以上的苹果分布在距地面垂直高度1-2m、距树干左右方向1-2m的空间范围内,且阴阳两面的苹果分布率并无明显的差异。这就要求采摘机械手应当具有较大的工作空间,因此选用多关节型机械手较为合适,且其占地面积较小,更加适合苹果采摘作业。 实际中,苹果生长位置随机分布,这就要求机械臂的末端执行器能够以准确的位置和姿态移动到指定点,因此,采摘机械人还应具有一定数量的自由度。机械臂的自由度是设计的关键参数,其数目应该与所要完成的任务相匹配。一般来说,自由度数量越多,机械臂的灵活性、避障能力越好,通用性也越广,但增加
自动采摘机器人设计介绍
番茄自动采摘机器人 引言:随着世界人口的急剧增加,农业生产所承受的压力越来越大,队大规模、高效率的生产模式的需求也日益明显。同时,科技的发展和各种理论、技术的突破也使得这类生产模式成为可能。农业机器人凭借其无疲劳、高效率的优势起到相当重要的作用。自动采摘机器人正是在这种背景下诞生的。20世纪末开始,美国、日本、法国、印度等许多国家开始了对自动采摘机器人的研究,并取得了一定成果,但应用情况并不乐观。 番茄内含有糖、有机酸、矿物质和多种维生素等营养成分,属于营养丰富的“水果蔬菜”,是广泛栽培的重要果菜种类。据20世纪90年代中期统计,世界番茄的总产量为4900万吨/年。随着设施农业的发展和作业机械化的要求,对番茄种植模式的要求也越来越高,尤其是在可控环境的温室中种植面积迅速增长,因此种植、管理和收获的劳动量也越大,研究开发果实收获机器人,实现机械化、自动化与智能化是现代农业工程的重要课题。 一、相关领域国内外研究现状 从1983年第一台番茄采摘机在美国诞生以来,采摘机器人的研究和开发已经历经了近20年。日本和欧美等发达国家相继理想研究用于采摘苹果、番茄、葡萄等水果的智能机器人。到1997年,国外开发的一系列果品蔬菜收摘机器人军言之出了样机。在农业机器人的研究方面,法国是最早研究水果收获机器的国家之一。荷兰收获机器人的研究工作也走在很多国家的前面,但研究的果蔬种类并不多。 在中国,农业机器人研究也逐渐起步。中国农业大学率先在我国研制出自动嫁接机器人,并先后研制成功了自动嫁接法、自动旋切贴合法等嫁接技术。吉林大学与吉林农业研究所研制的除草机器人,装有摄像机和图像处理计算机,能快速准确的分辨出蔬菜苗、杂草和土壤之间的差别,还能在种植行间自动行走。上海交通大学的曹其新等人开发了草莓拣选机器人样机。该样机具有学习功能,作业时可根据示教拣选对象的标准样本,改变或调整机器人拣选草莓的种类,并可一机多用,即使是没有专业知识的操作人员,也能很容易的掌握操作方法。 分析国内外农业机器人的研究进展与应用现状可知,国外已经研制了各种农业机器人,技术比较成熟,部分农业机器人已有初步应用,但我国农业